常用程序段
数控加工程序段的结构与格式

数控车床程序的结构☆学习目标1、了解一个完整程序的基本构成。
2、掌握G、S、M、F、T功能的使用方法。
一、加工程序结构数控加工中,为使机床运行而送到CNC的一组指令称为程序。
每一个程序都是由程序名、程序内容和程序结束三部分组成。
程序的内容则由若干程序段组成,程序段是由若干字组成,每个字又由字母和数字组成.即字母和数字组成字,字组成程序段,程序段组成程序。
二、程序代码①国际标准化组织ISO(international standard organization)②美国电子工业协会EIA(electronic industries association)国际上通用的数控代码有ISO、EIA两种。
目前,数控编程广泛采用的程序段格式是ISO.1、程序组成(1)程序编号(程序名)程序名为程序的开始部分,采用程序编号地址码区分存储器中的程序,每个程序都要有程序编号,在编号前采用程序编号地址码。
不同数控系统程序编号地址码不同,如日本FANUC数控系统采用“O”作为程序编号地址码;美国的AB8400数控系统采用P作为程序编号地址码;德国的SIEMENS数控系统采用%作为程序编号地址码等。
程序名是零件加工程序的代码,它是加工程序的识别标记,不同程序名对应着不同的加工程序零件.在程序名编写的时候要注意下面几点:①程序名写在程序的最前面,并且单列一行.②在同一数控机床中,程序名不可以重复使用。
③ FANUC系统中,程序号的书写格式是O××××,其中O是地址符,其后为四位数字,数值从O0000到O9999,如O0001。
在书写时起数字前的零可以省略不写,如O0001可写成O1。
O0000在数控系统中通常有特殊的含义,一般应尽量避免使用。
(O0000是MDI方式下默认的编号)(2)程序内容(刀具的运动轨迹)程序内容部分是整个程序的核心,由若干个程序段组成,每个程序段由一个或多个指令字构成,每个指令字由地址符和数字组成,它代表机床的一个位置或一个动作,每一程序段结束用“;”号。
数控机床程序段格式

数控机床程序段格式在编制数控机床程序时,首先要根据机床的脉冲当量确定坐标值,然后根据其程序段格式编制数控程序。
所谓程序段,就是指为了完成某一动作要求所需的功能“字”的组合。
“字”是表示某一功能的一组代码符号,如X2500为一个字,表示X向尺寸为2500;F20为一个字,表示进给速度为20。
程序段格式是指一个程序段中各字的排列顺序及其表达形式。
常用的程序段格式有三种,即固定顺序程序段格式、带有分隔符的固定顺序程序段格式和字地址程序段格式。
由于程序段是由功能“字”组成的,因此,以下先介绍常用功能字,然后再介绍程序段格式。
1)常用功能字一个程序段中,除了由地址符N为首的三位数组成的序号字(N×××)外,常用的功能字有:准备功能字G;坐标功能字X,Y,Z;辅助功能字M;进给功能字F;主轴转速功能字S和刀具功能字T等。
(1)准备功能字。
准备功能字以地址符G为首,后跟二位数字(G00-G99)。
ISO1056 标准对准备功能G的规定见表ISO 标准对准备功能G 的规定。
我国的标准为JB3208—83,其规定ISO1056—1975(E)等效。
这些准备功能包括:坐标移动或定位方法的指定;插补方式的指定;平面的选择;螺纹、攻丝、固定循环等加工的指定;对主轴或进给速度的说明;刀具补偿或刀具偏置的指定等。
当设计一个机床数控系统时,要在标准规定的G功能中选择一部分与本系统相适应的准备功能,作为硬件设计及程序编制的依据。
标准中那些“不指定”的准备功能,必要时可用来规定为本系统特殊的准备功能。
表ISO 标准对准备功能G 的规定(2)坐标功能字。
坐标功能字(又称为尺寸字)用来设定机床各坐标之位移量。
它一般使用X,Y,Z ,U ,V ,W ,P ,Q ,R ,A ,B ,C ,D ,E 等地址符为首,在地址符后紧跟着“+”(正)或“—”(负)及一串数字,该数字一般以系统脉冲当量为单位,不使用小数点。
数控程序段的一般格式及名字的含义
数控程序段的一般格式及名字的含义引言数控程序段是数控加工中的基本单元,它包含了一系列指令和参数,用于控制数控设备进行工作。
在本文档中,我们将介绍数控程序段的一般格式以及不同名字的含义,帮助读者更好地理解和应用数控编程。
一、数控程序段的一般格式数控程序段通常由多行代码组成,每行代码代表了一个指令或参数。
下面是数控程序段的一般格式:```N代码G代码X值Y值Z值F值S值```其中,各部分的含义如下:1.`N代码`:表示程序行号,用于程序的顺序控制。
2.`G代码`:表示预置功能代码,用于设定加工方式、工艺和补偿等。
3.`X值`、`Y值`和`Z值`:分别表示工件在X、Y、Z轴上的位置坐标。
4.`F值`:表示进给速度,即工件在加工中的移动速度。
5.`S值`:表示主轴转速,用于控制刀具的转速。
二、不同名字的含义在数控编程中,常用的名字有M代码、T代码和F代码,它们分别代表不同的功能和参数。
1.M代码M代码用于表示机床的辅助功能或工作方式的切换。
常见的M代码包括:-M00:暂停程序执行,等待操作员干预。
-M02:程序结束,停止机床运行。
-M03:开启主轴正转,启动切削或加工。
-M04:开启主轴反转。
-M05:停止主轴转动。
2.T代码T代码用于选择刀具,对应不同的工作头或刀具编号。
例如:-T01:选择1号刀具。
-T02:选择2号刀具。
3.F代码F代码用于设定进给速度。
常见的F代码包括:-F100:进给速度为100m m/mi n。
-F200:进给速度为200m m/mi n。
结论本文对数控程序段的一般格式和名字的含义进行了介绍。
数控程序段的格式包括了N代码、G代码、坐标值和速度值等部分,在编程过程中需要注意每个部分的含义和用法。
同时,不同的名字如M代码、T代码和F 代码代表了不同的功能和参数,合理应用这些代码可以实现更加精确和高效的数控加工。
希望本文对读者在数控编程中有所帮助。
程序段

c++;
g(b);
printf("%d\n",c);
return 0;
}
6.
#include <stdio.h>
#include <math.h>
#define DEBUG
#define S(r) PI*r*r
int main(void)
printf("%d",*p);
3.
#include<stdio.h>
int main(void)
{ ቤተ መጻሕፍቲ ባይዱ
char s1[12]="hello,";
int *q = a + N - 1;
while (p < q)
swap(*p++,*q--);
for(int i=0 ;i<N;i++)
printf("%d",a[i]);
return(0);
}
void swap(int a,int b)
{
int temp = a;
{
const double PI=4.0*atan(1.0); //double atan(double)是反正切函数
int r1=1;
int r2=2;
double s=S(r1+r2);
#ifdef DEBUG
printf("%4.1f\n",s);
2)sizeof(struct stu)=___14____
3)若使用tepedef重新定义struct stu的类型名为student,该语句为:__typedef struct stu{……}student;_____
plc控制伺服常用指令和程序段总结
plc控制伺服常用指令和程序段总结在工业自动化领域,PLC(可编程逻辑控制器)常用于控制伺服系统,以实现精确的运动控制。
PLC控制伺服系统的指令和程序段在传递运动命令、监测反馈信号和保护伺服系统方面起到至关重要的作用。
以下是对PLC控制伺服常用指令和程序段的总结。
1. 伺服控制指令:- 位置控制指令:用于将伺服系统定位到特定位置。
常用的指令包括MOVE、MOVEL、MOVES等,可以实现绝对位置控制和相对位置控制。
- 速度控制指令:用于调节伺服系统的运动速度。
常用的指令包括SPEED、ACCELERATE、DECELERATE等,可以实现平稳的速度控制。
- 力矩控制指令:用于调节伺服系统的输出力矩。
常用的指令包括TORQUE、GAIN等,可以实现精确的力矩控制。
2. 伺服控制程序段:- 位置控制程序段:在程序中定义伺服系统的目标位置,并根据反馈信号调节输出信号,使伺服系统准确到达目标位置。
程序段包括位置控制指令、位置误差计算和PID控制算法等。
- 速度控制程序段:在程序中定义伺服系统的目标速度,并根据反馈信号调节输出信号,使伺服系统保持平稳的运动速度。
程序段包括速度控制指令、速度误差计算和速度环控制算法等。
- 力矩控制程序段:在程序中定义伺服系统的目标力矩,并根据反馈信号调节输出信号,使伺服系统输出所需的力矩。
程序段包括力矩控制指令、力矩误差计算和力矩环控制算法等。
通过合理使用PLC控制伺服系统的指令和程序段,可以实现对运动的精确控制和保护。
在实际应用中,还需根据具体的控制要求和系统特点进行参数调整和优化,以获得最佳的控制效果。
总结:PLC控制伺服系统常用的指令包括位置控制指令、速度控制指令和力矩控制指令,而程序段则包括位置控制程序段、速度控制程序段和力矩控制程序段。
合理运用这些指令和程序段,可以实现精确的运动控制和保护。
数控加工程序段的结构与格式

数控加工程序段的结构与格式一、数控加工程序段的定义二、数控加工程序段的结构1.程序头程序头一般用于定义程序的参数和属性,包括程序号、程序名、切削工具号码、工件坐标系、进给速度和主轴转速等信息。
程序头对于程序的执行起到了明确指导的作用。
2.程序体程序体是数控加工程序的核心部分,用于定义加工路径和具体的加工参数。
程序体由多个加工指令组成,每个指令用于描述一个加工动作或操作。
3.几何参数几何参数是指在程序体中用来描述加工路径和几何形状的参数,通常包括工件坐标、绝对坐标和相对坐标等。
几何参数的正确设置对于加工精度和质量起到了至关重要的作用。
4.工艺参数工艺参数是指在程序体中用来设置切削速度、切削深度、进给量和切削方向等的参数,这些参数直接影响到加工过程中的切削效果和加工质量。
三、数控加工程序段的格式1.G代码G代码是一种控制指令,用于定义加工过程中的运动模式和加工方式。
常见的G代码包括G00(快速定位)、G01(线性插补)、G02(圆弧插补)和G03(圆弧插补)等。
2.M代码M代码是一种机械操作指令,用于控制数控机床的辅助功能和操作动作。
常见的M代码包括M03(主轴顺时针转动)、M04(主轴逆时针转动)和M05(主轴停止)等。
3.S代码S代码是一种主轴转速指令,用于调节主轴的转速。
S代码后面紧跟一个数值,表示主轴的转速。
4.T代码T代码是一种切削工具选择指令,用于选择切削工具。
T代码后面紧跟一个数字,表示切削工具的编号。
5.F代码F代码是一种进给速度指令,用于控制数控机床的进给速度。
F代码后面紧跟一个数值,表示进给速度。
总结:数控加工程序段的结构与格式是由程序头、程序体、几何参数和工艺参数等组成的。
程序头用于定义程序的参数和属性,程序体是核心部分,用于定义加工路径和具体的加工参数,几何参数用于描述加工路径和几何形状,工艺参数用于设置切削速度、切削深度等。
数控加工程序段的格式采用特定的编码规则和语法,常见的格式包括G代码、M代码、S代码、T代码和F代码等。
数控编程(04)程序段格式
返回
主轴转速功能字(S)
主轴转速功能字的作用是指定主轴 速度,单位为rpm。它以地址符S为首, 后跟一串数字。它与以F为首的进给功 能字一样,可以采用三位、二位、一位 数字代码法或直接指定法。数字的意义、 分档方法及对照表与进给功能字通用, 只是单位改为rpm。
返回
刀具功能字(T)
在具有换刀功能的机床上,刀具功 能字用以选择替换刀具。刀具功能字由 地址符T为首,其后一般跟二位数字, 代表刀具的编号。
04
05 06 07 08 09 10 11 12 13 14
1.60
1.80 2.00 2.24 2.50 2.80 3.15 3.55 4.00 4.50 5.00
24
25 26 27 28 29 30 31 32 33 34
16.0
18.0 20.0 22.4 25.0 28.0 31.5 35.5 40.0 45.0 50.0
常用功能字
1、准备功能字(G) 2、坐标功能字(X、Y、Z等)
3、进给功能字(F)
4、主轴转速功能字(S) 5、刀具功能字(T) 6、辅助功能字(M) 返回
准备功能字(G)(3-1)
准备功能字 准备功能字以地址
符G为首,后跟二位数字(G00~G99) 组成。我国标准代号为JB3208-83的标 准对准备功能字G的规定与ISO10571975E等效。
G90
G91
j
j
绝对尺寸
增量尺寸
部分G非模态代码为:
G代码 G92 仅在本程序段内有作用 # 功能 预置寄存
返回
坐标功能字(4-1)
坐标功能字的作用是用来设定机床 各坐标的位移量。坐标功能字一般以X、 Y、Z、U、V、W、P、Q、R、A、B、C等 地址符为首,在地址符后紧跟着带有正 号(+)或负号(-)的一串数字。该数字 一般以系统脉冲当量为单位,不使用小 数点。一个程序段中有多个坐标功能段 时,一般按上述地址符顺序排列。
VB常见程序段

VB常见程序段在计算机编程领域,VB(Visual Basic)是一种常用的编程语言,它具有易学易用的特点,被广泛应用于软件开发和应用程序设计。
在VB编程中,有一些常见的程序段被开发者广泛使用,本文将介绍其中一些常见的程序段,并探讨它们的用途和实际应用。
一、变量声明与赋值在VB编程中,变量的声明和赋值是最基本的操作之一。
通过声明变量,我们可以为其分配内存空间,并指定变量的数据类型。
赋值操作则是将一个值赋给变量,使其具有特定的数值或对象。
例如,我们可以声明一个整型变量num,并将其赋值为10:Dim num As Integernum = 10通过变量声明和赋值,我们可以在程序中存储和操作数据,实现各种功能。
二、条件语句条件语句在编程中扮演着重要的角色,它们可以根据不同的条件执行不同的代码块。
在VB中,常见的条件语句有If语句和Select Case语句。
If语句用于判断条件是否满足,如果满足则执行特定的代码块,否则执行其他的代码块。
例如:If num > 0 ThenMsgBox("num是正数")ElseMsgBox("num是负数")End IfSelect Case语句则可以根据变量的值执行不同的代码块。
例如:Select Case numCase 0MsgBox("num等于0")Case 1 To 5MsgBox("num是1到5之间的数")Case ElseMsgBox("num大于5")End Select通过条件语句,我们可以根据不同的情况执行不同的操作,增强程序的灵活性和适应性。
三、循环结构循环结构是编程中常用的一种结构,它可以重复执行一段代码,直到满足特定的条件为止。
在VB中,常见的循环结构有For循环和While循环。
For循环用于指定一个计数器变量,以及其起始值、终止值和步长。
微机原理必备程序段
1.数据传送:问题描述:设在DS=3000H,偏移地址为0100H的内存中顺序存放着100个字节的数据。
要求传送到以2000H为起始偏移地址的区域。
代码:利用寄存器间接寻址来寻找操作数可以编程如下:mov ax,3000hmov ds,ax ;建立数据段mov si,0100h ;建立源数据指针mov di,2000h ;建立目的地指针mov cx,100 ;设置计数器nt:mov al,[si] ;取数mov [di],al ;送数inc si ;调整指针inc didec cx ;计数器减1jne nt ;CX-1≠0转nt 标号另一种方法:提示:若将倒数第2、3行用 REP MOVSB代替,则可进一步简化。
MOV AX,3000HMOV DS,AXMOV ES,AXMOV SI,0100HMOV DI,0200HMOV CX,100CLDNT:MOVSBLOOP NTINT 20H2.多字节的加法:问题描述:有两个4字节的无符号数相加,这两个数分别放在2000H和3000H开始的存储单元中,低位在前,高位在后。
运算后,得到的和放在2000H开始的内存单元中。
代码:MOV SI,2000H ;取第一个数的首地址MOV AX,[SI] ;将第一个数的低16位取到AXMOV DI,3000H ;取第二个数的首地址ADD AX,[DI] ;两个数的低16位相加。
MOV [SI],AX ;低16位相加的结果送到2000H和2001H单元MOV AX,[SI+2] ;取第一个数的高16位送到AX中ADC AX,[DI+2] ;两个数的高16位连同CF相加MOV [SI+2],AX ;高16位相加的结果送到2002H,2003H单元。
3.多字节组合BCD码十进制加法问题描述:设第一个数据在1000H开始的8个内存单元中,第二个数据在2000H开始的8个内存单元中,要求相加之后将结果放在2000H开始的内存区域。
VB常见程序段
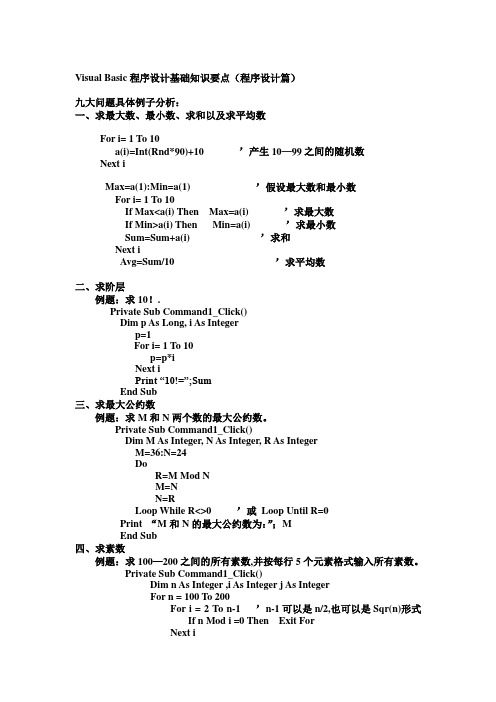
Visual Basic程序设计基础知识要点(程序设计篇)九大问题具体例子分析:一、求最大数、最小数、求和以及求平均数For i= 1 To 10a(i)=Int(Rnd*90)+10 ’产生10—99之间的随机数Next iMax=a(1):Min=a(1) ’假设最大数和最小数For i= 1 To 10If Max<a(i) Then Max=a(i) ’求最大数If Min>a(i) Then Min=a(i) ’求最小数Sum=Sum+a(i) ’求和Next iAvg=Sum/10 ’求平均数二、求阶层例题:求10!.Private Sub Command1_Click()Dim p As Long, i As Integerp=1For i= 1 To 10p=p*iNext iPrint “10!=”;SumEnd Sub三、求最大公约数例题:求M和N两个数的最大公约数。
Private Sub Command1_Click()Dim M As Integer, N As Integer, R As IntegerM=36:N=24DoR=M Mod NM=NN=RLoop While R<>0 ’或Loop Until R=0Print “M和N的最大公约数为:”;MEnd Sub四、求素数例题:求100—200之间的所有素数,并按每行5个元素格式输入所有素数。
Private Sub Command1_Click()Dim n As Integer ,i As Integer j As IntegerFor n = 100 To 200For i = 2 To n-1 ’n-1可以是n/2,也可以是Sqr(n)形式If n Mod i =0 Then Exit ForNext iIf i>n-1 Thenj=j+1 ’统计素数个数Print n;If j Mod 5 =0 Then Print ’输出5个数换行End IfNext nEnd Sub五、求水仙花数(拆数法)例题:求100—999之间的所有水仙花数,并将所有水仙花数在文本框中显示。
VB常见程序段

VB常见程序段VB(Visual Basic)是一种广泛应用于Windows平台的编程语言,它具有简单易学、功能强大的特点。
在VB编程中,常常需要使用一些常见的程序段来实现特定的功能。
以下是一些常见的VB程序段及其标准格式。
1. 数据类型定义在VB中,我们可以使用不同的数据类型来存储不同类型的数据。
以下是常见的数据类型定义的标准格式:```Dim 变量名 As 数据类型```例如,定义一个整数变量的标准格式为:```Dim num As Integer```2. 条件语句条件语句用于根据条件的真假执行不同的代码块。
以下是常见的条件语句的标准格式:```If 条件 Then' 代码块1ElseIf 条件 ThenElse' 代码块3End If```例如,判断一个数是否为正数的标准格式为:```If num > 0 Then' 正数的处理逻辑ElseIf num = 0 Then' 零的处理逻辑Else' 负数的处理逻辑End If```3. 循环语句循环语句用于重复执行一段代码,直到满足退出条件。
以下是常见的循环语句的标准格式:a. For循环:```For 变量 = 起始值 To 结束值 Step 步长Next 变量```例如,从1到10输出所有偶数的标准格式为:```For i = 1 To 10 Step 1If i Mod 2 = 0 Then' 输出偶数End IfNext i```b. While循环:```While 条件' 代码块Wend```例如,输出从1开始,每次乘以2直到大于100的所有数的标准格式为:```Dim num As Integer = 1While num <= 100' 输出numnum = num * 2Wend```4. 函数定义函数用于封装一段可重复使用的代码,并返回一个值。
以下是常见的函数定义的标准格式:```Function 函数名(参数列表) As 返回值类型' 代码块' 返回值End Function```例如,定义一个函数来计算两个数的和的标准格式为:```Function Add(num1 As Integer, num2 As Integer) As IntegerDim sum As Integersum = num1 + num2Return sumEnd Function5. 错误处理在VB中,我们可以使用错误处理机制来捕获和处理运行时错误。
3. 3加工程序的结构及程序段格式

3. 3加工程序的结构及程序段格式加工程序是数控加工中的核心组成部分。
不同的数控系统,其加工程序的结构及程序段格式也可能有某些差异。
掌握各种数控系统所规定的有关结构和格式,即可顺利编制出所需要的加工程序。
3.3.1加工程序的结构一个完整的程序必须包括程序的开始部分、内容部分和结束部分。
程序的开始部分通常用符号“O”表示,结束部分多用“M02”、“M30”或符号“EM”表示,其内容部分由程序段格式具体规定。
例1O0001 (程序开始部分)N0010 G92 X25 Z50N0020 S02 M03N0030 G00 X20 Z45 (程序内容部分)························N0150 M30 (程序结束部分)数控加工程序的结构一般由引导程序、主程序及子程序组成。
3.3.1.1引导程序较多的数控系统都规定有引导程序,其作用如下。
(1)指定将运行的加工程序号在数控系统中,通常可存储若干个加工程序,每个加工程序都有一个不重复的编号(即程序号)。
当前需要执行的加工程序,必须通过由引导程序以指定其程序号的方式调出,否则数控装置将不知道应该执行哪一个加工程序。
(2)用于设定一些必要的参数指在主程序(含子程序)运行过程中,根据加工的需要设定的某些参数,如快速点定位(空程)的进给速度、机械间隙自动补偿量、刀具自动补偿量及转刀偏置量等。
有些数控系统,在加工程序中未规定其引导程序,上述作用是通过其他输入和存储方式,并经其加工程序中相应的程序段格式予以调出执行的。
3.3.1.2主程序主程序由指定加工顺序、刀具运动轨迹和各种辅助动作的程序段组成,它是加工程序的主体结构。
5.梯形图编程规则与技巧、转换、常用程序段

第四部分 PLC
第四部分 PLC
第四部分 PLC
第四部分 PLC
第四部分 PLC
二、控制电路
梯形图
1、确定I/O并分配 、确定I/O并分配 I/O I:按钮、开关、继电器/接触器触点等 O:继电器/接触器线圈 I用X表示,O用Y表示 2、画梯形图 、 从电源的一端(起始母线)出发,逐一转换, 直到另一端(终止母线) 熔断器不转换 3、按梯形图规则调整修改 、
6、顺序控制程序1 顺序控制程序1
第四部分 PLC
6、顺序控制程序2 顺序控制程序2
第四部分 PLC
梯形图经验设计方法(步骤) 梯形图经验设计方法(步骤)
1、明确控制要求 2、确定I/O位置 确定I/O 确定I/O位置 3、I/O地址分配(端口表) I/O地址分配 I/O地址分配(端口表) 4、设计、整理输入/输出信号间的逻辑关系 设计、 设计 整理输入/输出信号间的逻辑关系 5、画外围连线图 6、编写梯形图程序 7、检查修改和完善程序
第四部分 PLC 物料传送系统
基本程序段
(计数器构成通电延时程序) 计数器构成通电延时程序) M8013 1S
(断电延时程序) 断电延时程序)
第四部分 PLC
基本程序段
定时范围的扩展
X2 T0 T0 X2 RST T0 C0 C0 Y0 K60 Y0
1 Hour
K600
C0
X2
第四部分 PLC
基本程序段
5、二分频程序
第四部分 PLC
(启—保—停程序) 保 停程序)
2、互锁程序1 互锁程序1
(线圈常闭触点构成) 线圈常闭触点构成)
第四部分 PLC
基本程序段
2、互锁程序2 互锁程序2
程序段的功能

主程序:网络1:系统上电后或者按下停止按钮后,置位屏幕自动切换信号,各气缸复位,各个信号复位,变频器停止运行,高数计数器清零,元件属性清零,工件槽一、二、三中工件数量复位。
网络2:计时3S后屏幕自动切换复位。
网络3:物料口有料信号。
网络4:传送带停止运行,各气缸活塞杆处于缩回状态,系统处于初始状态。
网络5:按下启动按钮,如果当前在初始状态则系统启动。
网络6:按下停止按钮,如果当前在启动状态系统停止。
网络7:物料口有料延时1S钟。
有物料后若元件属性选择1则推料一信号启动,后清零高数计数器以及元件属性选择寄存器。
网络9:有物料后若元件属性选择2则推料二信号启动,后清零高数计数器以及元件属性选择寄存器。
网络10:有物料后若元件属性选择3则推料三信号启动,后清零高数计数器以及元件属性选择寄存器。
网络11:高数计数器计数脉冲在25000以上,如果料是黑色的只能推入第二个槽。
网络12:系统启动后,如果没有打包信号,就调用推杆动作子程序。
网络13:如果三个料槽内料都是两个,那么给出打包信号。
若料槽1内有料,红灯闪烁,提示两秒内手工将1槽内的工件取走,当1槽内没有工件时(2s过后),红灯熄灭。
网络15:有可以打包信号后绿灯闪烁,延时3S后,打包完成。
网络16:3S打包完成之后,三个槽内元件数量清零。
网络17:绿灯指示网络18:显示当前运行速度和当前位置。
推杆动作子程序:网络1:将工件运到一槽处,并将料推进一槽内。
网络2:推杆一推到位后缩回,一槽内工件数量加一。
网络3:将工件运到二槽处,并将料推进二槽内。
推杆二推到位后缩回,二槽内工件数量加一。
网络5:将工件运到三槽处,并将料推进三槽内。
网络6:推杆三推到位后缩回,三槽内工件数量加一。
发那科goto跳转程序段

发那科goto跳转程序段什么是发那科goto跳转程序段?发那科(FANUC)是一家全球领先的工业机器人制造商,其goto跳转程序段是一种在发那科机器人编程中常用的语句。
通过goto跳转程序段,可以实现程序的跳转和循环执行,提高编程效率和灵活性。
goto跳转程序段的基本语法goto跳转程序段的基本语法如下:LBL[label_name]其中,LBL是goto跳转程序段的关键字,label_name是标签名,可以是任意字符串,用于标识程序段的位置。
goto跳转程序段的应用场景goto跳转程序段在发那科机器人编程中有着广泛的应用场景,主要包括以下几个方面:程序跳转通过goto跳转程序段,可以实现程序的跳转执行。
在程序中,可以使用goto语句将程序的执行流程跳转到指定的标签位置。
这样可以方便地实现程序的分支和循环执行,提高程序的灵活性。
例如,我们可以使用goto跳转程序段来实现一个简单的循环执行程序:LBL start...// 执行一些操作...JMP start在上述代码中,start是一个标签,通过JMP语句将程序的执行流程跳转到start标签的位置,从而实现了程序的循环执行。
程序分支通过goto跳转程序段,还可以实现程序的分支执行。
在程序中,可以使用goto语句根据某个条件将程序的执行流程跳转到不同的标签位置,从而实现程序的分支执行。
例如,我们可以使用goto跳转程序段来实现一个简单的条件判断程序:LBL start...// 执行一些操作...IF condition JMP true_label...// 执行一些操作...JMP endLBL true_label...// 执行一些操作...LBL end在上述代码中,condition是一个条件表达式,根据条件的结果,通过IF语句将程序的执行流程跳转到不同的标签位置,从而实现了程序的分支执行。
程序循环通过goto跳转程序段,还可以实现程序的循环执行。
数控铣床z轴从当前点回零的程序段为
数控铣床z轴从当前点回零的程序段今天我们来谈论一下数控铣床中经常用到的一个程序段,即z轴从当前点回零的程序段。
在数控铣床的操作过程中,z轴的回零操作是非常常见的,也是非常重要的一步。
下面,我将从深度和广度的角度来探讨这个程序段的相关内容。
1. 程序段的基本概念在数控铣床中,程序段是对机器进行控制的基本单元。
z轴从当前点回零的程序段,顾名思义,就是让铣床的z轴从当前位置回到零点位置的程序段。
这个程序段通常涉及到坐标系的切换和坐标变换,是数控铣床中非常基础和重要的一部分。
2. 程序段的执行步骤在实际操作中,z轴从当前点回零的程序段通常包括以下几个步骤:- 需要确认当前位置的坐标,确定z轴的当前位置。
- 需要计算当前位置到零点位置的距离,以及z轴需要移动的距离。
- 进行坐标系的切换和坐标变换,将当前位置的坐标转换为零点位置对应的坐标。
- 通过数控系统发送指令,让z轴按照计算出的距离进行移动,从而回到零点位置。
3. 程序段的注意事项在编写和执行z轴从当前点回零的程序段时,有一些注意事项需要特别关注:- 需要确保当前位置的坐标和零点位置的坐标是准确无误的。
- 需要考虑到z轴的移动速度和加速度,避免因为移动过快或者过慢导致的问题。
- 另外,还需要考虑到机床本身的特性和工件的情况,保证z轴回零的过程中不会造成碰撞或者其他意外。
4. 个人观点和理解在我看来,z轴从当前点回零的程序段虽然看似简单,但实际上涉及到了很多复杂的计算和控制过程。
在实际操作中,需要细心、谨慎地进行编写和执行,以确保机床和工件的安全和稳定性。
也需要不断地学习和探索,掌握更多高效、安全的回零方法。
总结回顾:在本文中,我围绕着数控铣床中z轴从当前点回零的程序段展开了全面的评估和讨论。
从程序段的基本概念、执行步骤到注意事项,都进行了深入的探讨。
我也共享了个人对这个程序段的观点和理解。
通过本文的阅读,相信读者能够全面、深刻且灵活地理解这个程序段的相关内容。
数控机床程序段格式有哪些
数控机床程序段格式有哪些数控机床程序段格式有哪些?在小型加工中心编制数控机床程序时,首先要根据机床的脉冲当量确定坐标值,然后根据其程序段格式编制数控程序。
所谓程序段,就是指为了完成某一动作要求所需的功能"字"的组合。
"字"是表示某一功能的一组代码符号,如X2500为一个字,加工中心表示X向尺寸为2500;F20为一个字,表示进给速度为20。
程序段格式是指一个程序段中各字的排列顺序及其表达形式。
常用的程序段格式有三种,即固定顺序程序段格式、带有分隔符的固定顺序程序段格式和字地址程序段格式。
由于程序段是由功能"字"组成的,因此,以下先介绍常用功能字,然后再介绍程序段格式。
gfdh_jc 1)常用功能字一个程序段中,除了由地址符N为首的三位数组成的序号字(N×)外,常用的功能字有:准备功能字G;坐标功能字X,Y,Z;辅助功能字M;进给功能字F;主轴转速功能字S和刀具功数控等离子切割机安全操作维护规程数控系统中螺纹电路设计及常见问题处理方法数控火焰切割机的分类及应用数控切割机发展趋势等离子切割机原理数控加工虚拟仿真系统代码编译器的研究旋转编码器在液压刀库位控中的应用高速加工中心组成的敏捷柔性生产线的研制和应用数控重型立车电气随动车削装置的研制圆体成形车刀设计的关键技术数控切割工艺的处理和方法等离子切割喷嘴耗材很关键教您如何选购切割套料软件数控切割机实现一机两用功能火焰切割铸坯割面的相关问题解析新型数控切割控制系统在汉首试成功数控信息化管理实行发展层面化数控切割机操作的几项规则激光切割机投入飞机零件制造中的应用等离子切割的相关注意事项数控切割机从外观形状分为几种数控等离子切割机安全操作维护规程等离子切割机的应用变型零件数控程序快速生成系统研究基于UG的零误差圆体成形车刀设计数控机床定位精度与激光干涉仪测试曲线PowerMILL在五轴机床上轮胎模具中的应用整体看我国的数控系统认识超高压水切割机机床主轴和转台的轴承选型浅析数控火焰/等离子切割的发展前景编译系统采用的译码方法焊接自动化技术的现状与展望等离子切割的调高方式自主创新,诚信经营,企业立足之本数控切割机怎么选型?等离子切割辅助气体分类大全线切割加工中短路处理方法中国数控切割机销售情况分析上海数控火焰切割机技术参数详细介绍上海数控火焰切割机技术参数详细介绍数控切割机从外观形状分为几种中国数控切割机销售情况分析数控等离子切割机安全操作维护规程等离子切割机的应用基于UG的零误差圆体成形车刀设计变型零件数控程序快速生成系统研究数控机床定位精度与激光干涉仪测试曲线PowerMILL在五轴机床上轮胎模具中的应用数控火焰/等离子切割的发展前景认识超高压水切割机整体看我国的数控系统焊接自动化技术的现状与展望机床主轴和转台的轴承选型浅析编译系统采用的译码方法自主创新,诚信经营,企业立足之本数控切割机怎么选型?等离子切割辅助气体分类大全等离子切割的调高方式线切割加工中短路处理方法等离子切割的相关注意事项等离子切割机原理数控等离子切割机安全操作维护规程数控系统中螺纹电路设计及常见问题处理方法数控加工虚拟仿真系统代码编译器的研究数控重型立车电气随动车削装置的研制旋转编码器在液压刀库位控中的应用数控机床切削加工过程的模型参考自适应控制研究高速加工中心组成的敏捷柔性生产线的研制和应用圆体成形车刀设计的关键技术数控切割工艺的处理和方法教您如何选购切割套料软件等离子切割喷嘴耗材很关键数控切割机实现一机两用功能火焰切割铸坯割面的相关问题解析数控切割机操作的几项规则新型数控切割控制系统在汉首试成功国内外数控等离子切割技术的发展趋势数控信息化管理实行发展层面化便携式等离子切割机选择能字T等。
c语言程序段数据段

c语言程序段数据段数据段是C语言程序中的一个重要部分,它用于存储程序运行过程中需要使用的数据。
在C语言中,数据段分为全局数据段和局部数据段两种类型。
全局数据段是在程序运行之前就已经分配好的内存空间,它存储的是全局变量和静态变量。
全局变量是定义在函数外部的变量,它的作用域是整个程序,可以被程序中的所有函数访问和修改。
静态变量是在函数内部定义的变量,但是它的作用域也是整个程序,不同的是它的生命周期是整个程序运行过程。
局部数据段是在程序运行过程中动态分配的内存空间,它存储的是局部变量。
局部变量是定义在函数内部的变量,它的作用域仅限于函数内部,当函数执行完毕后,局部变量所占用的内存空间会被释放。
全局数据段和局部数据段的主要区别在于作用域和生命周期。
全局数据段的作用域是整个程序,而局部数据段的作用域仅限于函数内部。
全局数据段的生命周期是整个程序运行过程,而局部数据段的生命周期仅限于函数的执行过程。
在C语言程序中,数据段的使用非常广泛。
我们可以在数据段中定义各种类型的变量,如整型、字符型、浮点型等。
这些变量可以用于存储程序运行过程中需要使用的各种数据,如用户输入的数据、程序计算的结果等。
数据段的定义和使用需要遵循一定的规则。
首先,我们需要在程序中声明变量的类型和名称。
其次,我们可以给变量赋初值,也可以在程序运行过程中动态地改变变量的值。
最后,我们可以通过变量的名称来访问和修改变量的值。
在C语言中,我们可以使用各种操作符和函数对数据段中的变量进行操作。
例如,我们可以使用赋值操作符将一个值赋给一个变量,使用算术操作符进行数值计算,使用逻辑操作符进行逻辑运算等。
数据段的使用不仅局限于定义和操作变量,还可以用于定义和操作数组、结构体和指针等数据结构。
数组是一种存储相同类型数据的连续内存空间,它可以通过下标访问和修改其中的元素。
结构体是一种自定义的数据类型,它可以同时存储多个不同类型的数据。
指针是一种特殊的变量,它存储的是内存地址,可以用于间接访问和修改其他变量的值。