系统函数
系统函数(网络函数)H(s)解读

§4.6 系统函数(网络函数)H (s )•系统函数; LTI 互联网络的系统函数;并联;级联; 反馈连接一.系统函数 1.定义响应的拉氏变换与激励的拉氏变换之比2.H (s )的几种情况策动点函数:激励与响应在同一端口时策动点导纳 策动点阻抗转移函数:激励和响应不在同一端口转移导纳 转移阻抗电压比 电流比()()()s H s E s R ⋅=↔)()()(s E s R s H =∴()()()t h t e t r *=)]([)()],([)( t e L s E t r L s R ==其中系统的零状态响应时当 ,)()(t t e δ=)()(s H s R =)()(t h t r =)()]([s H t h L =则单端口网络()s I 1+-()s V 111')()()(11s V s I s H =)()()(11s I s V s H =+-()s V 2)()()(12s V s I s H =)()()(12s I s V s H =)()()(12s V s V s H =)()()(12s I s I s H =3.求H (s )的方法微分方程两端取拉氏变换→利用网络的s 域元件模型图,列s 域方程→4.应用:求系统的响应二.LTIS 互联的系统函数 1.LTI 系统的并联2.LTI 系统的级联3.LTI 系统的反馈连接()()s H t h →()()()s E s R s H =()()()s E s R s H =)()()()()(t h t e t r t h s H *=→→方法一:)()()()(t r s E s H s R →=方法二:()()()t h t h t h 21+=)()()(21s H s H s H +=)()()( :21t h t h t h *=时域)()()( :21s H s H s H ⋅=频域()s H 1()s H 2()s E ()s R ()s H 1()s H 2()s E ()s R ()s E 1()s E 2-+)()()(21s E s E s E -=)()()(22s H s R s E ⋅=[])()()()(21s E s E s H s R -⋅=4.结论在s 域可进行代数运算:比较H (s )和H (p )例4-6-1(1)在零起始状态下,对原方程两端取拉氏变换(2))()()()(211s E s H s E s H -=)()()()()(211s R s H s H s E s H ⋅-=)()(1)()()()(211s H s H s H s E s R s H +==∴()。
第七章系统函数

∏ ∏
i =1 j =1 n
m
(s − z j ) ( s − pi )
(7―2)
把系统函数的零点与极点表示在s平面上的图形, 把系统函数的零点与极点表示在s平面上的图形, 叫做系统函数的零、 极点图。 其中零点用“ 叫做系统函数的零 、 极点图 。 其中零点用 “ o” 表示 。 表示。 极 点 用 “ ×” 表 示 。 若 为 n 重 极 点 或 零 点 , 则 注 以 ( n) 。 例如某系统的系统函数为
H ( s) = H 0
∏ ∏
i =1 m j =1 n
m
(s − z j ) (s − p j ) ( jω − z j ) ( jω − p j )
H ( jω ) = H 0
∏ ∏
i =1 j =1 n
(7―8)
图7.3中画出了由零点zj和极点pi与虚轴上某点jω连接 中画出了由零点z 和极点p 与虚轴上某点jω jω连接 构成的零点矢量jω 和极点矢量jω 构成的零点矢量jω-zj和极点矢量jω-pi。图中Nj、Mi分别 jωjω图中N 表示矢量的模,θ 表示矢量的模,θj、φi分别表示矢量的相角,即 分别表示矢量的相角,
当正弦激励信号的频率ω 改变时, 当正弦激励信号的频率 ω 改变时 , 稳态响应的幅度和相 位将分别随着H jω) 位将分别随着 H ( jω ) 和 φ ( ω ) 变化 ,H ( jω ) 反映了 变化,H jω) ,H( 系统在正弦激励下稳态响应随频率变化的情况, 系统在正弦激励下稳态响应随频率变化的情况 , 故又称系统 的频响特性。 的频响特性。 若 H ( s ) 的极点均位于 s 左半平面 , 令 s=jω, 也就是在 s 的极点均位于s 左半平面, s=jω,也就是在 也就是在s 平面上令s沿虚轴变化,则有H(s)|s=jω=H(jω), 平面上令s沿虚轴变化,则有H(s)|s=jω=H(jω),即为系统的 H(s)|s=jω=H(jω),即为系统的 频响特性。根据H 频响特性。根据H(s)在s平面的零、极点分布情况可以绘 平面的零、 制出频响特性曲线,包括幅频特性|H(jω)| 制出频响特性曲线 , 包括幅频特性 |H(jω)| 曲线和相频特性 |H(jω)|曲线和相频特性 φ(ω)曲线 下面介绍这种方法。 φ(ω)曲线,下面介绍这种方法。 曲线, 由式( 由式(7―2),系统函数H(s)的表示式为 系统函数H
系统函数(网络函数)H(S)

二.H(s)零、极点与h(t)波形特征的对应
11
页
1.系统函数的零、极点
H (s) A(s) K (s z1 )(s z2 ) (s z j ) (s zm ) B(s) (s p1 )(s p2 ) (s pk ) (s pn )
z1 , z2 zn 系统函数的零点
在s域分析中,借助系统函数在s平面零点与极点 分布的研究,可以简明、直观地给出系统响应的许多 规律。系统的时域、频域特性集中地以其系统函数的 零、极点分布表现出来。
主要优点:
1.可以预言系统的时域特性; 2.便于划分系统的各个分量
(自由/强迫,瞬态/稳态); 3.可以用来说明系统的正弦稳态特性。
第
et[cos(3t) sin(3t)]u(t) et 2 sin(3t 45o )u(t)
两系统函数仅是零点不同,它们对应的冲激响应仅是响应幅 度和相位不同,响应波形的模式均为衰减振荡模式
三.H(s) 、E(s)的极点分布与自由响应、强
第
迫响应特性的对应
17 页
激励: e(t) E(s) u
第
二阶极点
15
页
H(s) 1 , 极点在原点, h(t) tu(t), t , h(t) s2
H(s) 1 ,极点在实轴上, (s a)2
h(t) t et u(t),α 0, t , h(t) 0
H
(s)
(s2
2s ω2
)2
,
在虚轴上,
h(t) t sintu(t), t , h(t) 增幅振荡
系统函数:h(t) H(s) m
(s zl )
(s zj )
E(s)
l 1 v
H(s)
j 1 n
第七章 系统函数

H ( e j ) H ( z ) z e j bm (e j zi )
i 1 m
(e p )
j i i 1
n
j j ( e z ) 和 ( e pi ) 为复数,故令 由于是 i
是当h(t)不满足绝对可积条件时,则至少有某个有界输 入f(t)产生无界输出yf(t)。 为此,设f (t)有界,则 f(-t)也有界,并且表示为
1 f ( t ) sgn[h(t )] 0 1
于是有
h(t)>0 h(t)=0 h(t)<0
h(t ) f (t ) h(t )
1 2
j j j 令 Be jw , A1e jw p1, A2e jw p2 ,
则H(jω)又可表示为
Be j B j ( 1 2 ) j (w ) H ( jw ) e | H ( j w ) | e A1e j1 A2e j 2 A1 A2
二、 H(s)与系统的频率特性 若系统的系统函数H(s)的极点全部在左半平面, 即H(s) 的收敛域包含 jω 轴,则
H ( jw ) H ( s ) s jw
bm ( jw si )
i 1 m
H ( jw ) H ( s ) s jw
( jw p )
i 1 i
第七章 系统函数
B() H () A()
连续系统
B( s) bm s m bm1s m1 b1s b0 H ( s) n A( s) s an1s n1 a1s a0
离散系统
B( z) bm z m bm1 z m1 b1 z b0 H ( z) n A( z) z an1 z n1 a1 z a0
自动控制原理-系统函数

可见,S平面的左半平面(<0)对应Z平面的圆内(|Z|=<1);在S平面 以虚轴为界,Z平面以|Z|=1的单位圆为界
(1) 0 s j
z e j 1
(2) 0 s j
z 1
(3) 0 z 1
(4) 常数 0
z R1
(5) 常数 0
z r1
j Im[z]
(7) 0, 0
s2 s2
) )
(s (s
s1 )(s s1 )(s
s1* ) s1* )
其频率特性为: H ( j ) ( j s1 )( j s2 ) B1B2 e j( 2 12 ) ( j s1 )( j s2 ) A1 A2
对所有的ω有A1=B1, A2=B2,所以幅频特性 H ( j ) 1
2
(3)因为系统为双边序列,所以收敛域为 1/2<|Z|<3;
所以
h(k) ( 1)k (k) 3k (k 1)
2
问:因果系统的极点在…
二、系统函数与时域响应
• 时域特性能反映响应变化的快慢、上升、下 降时间长短及衰减的程度等。
• 系统的自由响应(P42)的函数(或序列) 形式由A(·)的根确定,亦即由H(·)的极点确 定,而冲击响应或单位序列响应的函数形式 也由H(·)极点确定。
H
(
j)
H (s)
|s
j
(
j
6 2)(
j
3)
6 A1e j1 A2e j2
| H ( jw) | e j
根据上式可分别画出其幅频曲线和相频曲线
j
A2 A1
2
1
-3 -2 -1 0
| H ( j) | 6
| A1A2 |
【信号与系统】03-系统函数的性质

【信号与系统】03-系统函数的性质1. 系统函数的性质1.1 变换的对偶性 不管是傅⾥叶变换的频域还是拉普拉斯变换的s域(下⾯统称s域),都是深⼊讨论LIT系统的有⼒⼯具,有时甚⾄是必备⼯具。
s域的系统函数和时域的信号(单位冲激响应)是⼀对共⽣体,它们通过拉普拉斯变换⽣成彼此,同时也是连接两个域的纽带。
对⼀个函数解析式,经常要对它做⼀些常规的分析操作,⽐如运算、平移、缩放、微积分、卷积等。
⼀个很⾃然的问题是,在某个域的分析操作会对另⼀个域带来什么影响呢?本篇就来讨论这个问题。
在正式讨论之前,有必要再回顾⼀下拉普拉斯变换的公式。
你可能⼀开始就注意到,正反变换存在⼀定的“对称性”,⽽仅在局部有微⼩差别。
在数学上,两个概念如果通过类似的⽅法互相定义,它们就称为对偶的,从形式上不难看出,互为对偶的概念的性质也是对偶存在的,这就省去了相似论证的⿇烦。
信号x(t)和拉普拉斯变换H(s)之间不具有严格的对偶性,但这样的相似性仍然可以被使⽤。
如果记χ(ω)=eσ√2πX(σ+jω),将得到更为对称的式(1),把这个关系记作变换T,显然有式(2)成⽴。
以后变换的性质如果本⾝不是对称的,可以运⽤该式迅速得到另⼀个对称的性质,当然简单的性质直接证明会更快。
x(t)=1√2π∫∞−∞χ(ω)e jωt dω;χ(ω)=1√2π∫∞−∞x(t)e−jωt d t x(t)T↔χ(ω)⇔χ(t)T↔x(−ω)1.2 拉普拉斯变换的性质 以下按函数运算的复杂程度,罗列LT的基本性质,过于直⽩的结论不加证明。
需要注意的是,性质成⽴有它⾃⼰的ROC,并不完全受限于原LT的ROC。
还有我们知道,ROC和积分在具体的s上的收敛性是不同的,以下性质在ROC外的收敛点仍然可以是成⽴的。
⾸先是函数的线性运算,在s域也是线性的(式(3))。
然后看函数的平移,容易有式(4)左成⽴,在s域的平移还有式(4)右成⽴,这是⼀组对偶性质。
当对函数进⾏伸缩时,频谱系数也跟着反⽐例伸缩(式(5)左);特别地,a=−1时表⽰函数左右翻转(旋转180度),s域则也跟着旋转180度(式(5)右)。
系统函数的定义

系统函数的定义
系统函数定义
1、系统函数
系统函数是一类特殊的程序函数,用来实现由操作系统提供的功能,这些功能不能由应用程序直接实现,而是由操作系统来完成。
2、系统函数的定义
系统函数是一类特殊的程序函数,它们用来实现由操作系统提供的功能,而这些功能无法由应用程序直接实现。
系统函数是操作系统提供给应用程序的公共接口,通过调用系统函数来实现操作系统提供的功能。
3、系统函数的特点
(1)系统函数是可重入的,这是因为它必须支持多个任务同时运行。
(2)系统函数是可移植的,这是因为它必须能够移植到不同平台。
(3)系统函数是可调试的,这是因为它必须能够被调试以便发现问题并进行修复。
(4)系统函数是安全的,这是因为它必须能够确保操作系统的安全性。
- 1 -。
12.3系统函数的零点和极点

系统函数的零——极星图。下面将
得到证实,通过零点、极点的分布
可以预见响应的基本特征。
2 中北大学国家级电工电子实验教学示范中心
系统函数的零点和极点
仍以RLC串联电路为例,若以电压源为激励,电
流为响应,其系统函数为策动点导纳
H s
I s Us s
R
1 sL 1
sC
1 L
s2
s Rs
1
s
k1h
p1
★式中H0是实系数。当s取值分别等于p1、p2、…pn 时系统函数存在极值,则这些取值点称为系统函 数的极点。又当s取值分别等于z1、z2、…zm时则系 统函数为0,则这些取值点称为系统函数的零点。
★可见零点、极点是变量s的特殊取值点,它对响 应产生重要影响。
1 中北大学国家级电工电子实验教学示范中心
s
k2h p2
L LC
可见,当s = 0时存在零点,它在复平面的原点。
对于极点我们已经很熟悉
R p1,2 2L
R
2
1
2L LC
2 02
★因为该例仍是二阶电路,根据参数的不同,极 点会有三种不同的情况。
3 中北大学国家级电工电子实验教学示范中心
系统函数的零点和极点
★①当δ>ω0,这是过阻尼情况( R>2 L)C 。p1、 p2是一对不等的负实根且∣p2∣>∣p1∣。 此时极点落在负实轴上,如图所 示。这能说明什么问题呢?假如 是阶跃激励,请看响应
I s H sU s 1
s
Us
L s2 sR L 1 LC s
Us L
s2
sR
1 L
1
LC
s
k1
p1
第七章 系统函数

• H ejω 即h(n)的DTFT • ejω 为周期函数,所以 H ejω 为周期函数,其周期为 2π 。
通过本征函数透视系统的频响特性
设输入xn ejn
为本征函数
xn hn yn
hn为稳定的因果系统
yn hn xn
h m ejωnm e j n h m ejω m
1 M1 ejθ1
V2 ej ω V1
ω
O
1
ω
式中:V2= 1 V1 RC
1 M
, = -θ 1
45
RC
90
低通网络,截止频率位于ω 1 处 RC
例研究右图所示二阶RC系统
的频响特性H
jω
V2 jω V1 jω
,
注意,图中kv3是受控电压 v1t
R1 C1
v3t
C2 kv3 R2
v2 t nO Nhomakorabean
θ2
ω
ω
系统对不同频率的输入,产生不同的加权,这就是系 统的频率响应特性。
由系统函数得到频响特性
离散时间系统在单位圆上的z变换即为傅氏变换,即系 统的频率响应特性:
H ej H z z ejω H ejω ejω H ejω ~ ω :幅频特性
输出与输入序列的幅度之比
ω ~ ω :相频特性
limh(t) →∞
t→∞
2.离散系统:
Z平面: 单位圆内:p=-1/3,h(k)=
1 3
k
(k)
→0
单位圆上:p=1,h(k)=1k (k),有限值.
单位圆外:p=2,h(k)= 2 k (k) →∞
z平面
-1/3 0 1 2
极点位置与h(n)形状的关系
信号与系统——系统函数
幅频: | H ( j) | bm B1B2...Bm
A1A2... An
相位:()=(1+…+m)-(1+…+n) 分析: 从0~∞
2019/11/20
22
例: u1(s) + -
R 1/sc
u2(s)
1 sc H(s)=u2(s)/ u1(s) = R 1 sc
11 = Rc s 1 Rc
写出网络转移函数表达式
Hs
V2 s V1 s
1 RC
s
1 1
RC
1 RC
2019/11/20
1 M1 ejθ1
V2 ej ω V1
M1
θ1
1 RC
jω
O
σ
30
频响特性 V2
jω
1 V1
M1
1
2
θ1
1 RC
O
σ
O1 RC
ω
H
Im[z] Z平面
2019/11/20
-1/3
1 2 Re[z]
13
极点位置与h(k)形状的关系
j Im z
1
O
1
Re z
2019/11/20
14
利用z~s平面的映射关系
s平面(单极点)
z平面(单极点)
极点位置 h(t)特点 极点位置 h(k)特点
虚轴上
等幅
单位圆上 等幅
原点时 左半平面
t 1
2019/11/20
28
结论:
凡极点位于左半开平面,零点位于右半开 平面,且所有的零点与极点对于j轴为一 镜像对称的系统函数即为全通函数.
第七章 系统函数

f (t ) et (t )
t
9
H ( s)
(s pi )
i 1
n
H(s)的极点与所对应的响应函数
7.1
系统函数与系统特性
2.离散因果系统 H(z)按其极点在z平面上的位置可分为:在单位圆内、 在单位圆上和在单位圆外三类。 根据z与s的对应关系,有结论: ①H(z)在单位圆内的极点所对应的响应序列为衰减的。 即当k→∞时,响应均趋于0。极点全部在单位圆内的系 统是稳定的系统。
2
7.1
系统函数与系统特性
7.1 系统函数与系统特性 一、系统函数的零、极点分布图
LTI系统的系统函数是复变量s或z的有理分式,即 B() H () A() A(.)=0的根p1,p2,…,pn称为系统函数H(.)的极点; B(.)=0的根1,2,…,m称为系统函数H(.) 的零点。 m
i 1
n
H s
s jω
H jω H jω e
j ω
H jω ——幅频特性
ω ——相频特性(相移特性)
13
H j ω H s
s jω
bm j ω j
m
7.1
系统函数与系统特性
jω p
i 1 i
H (s) 6 6 6 ( s 2)(s 3) s 2 s 2
h(t ) 6(e 2t e 3t ) (t ) g (t ) h( )d [1 e 2t 2e 3t ] (t )
0 t
(2)
Yzs ( s)
1 ( s 1)(s 2)(s 3) Yzs( s) 1 F (s) H ( s) 6( s 1)
系统函数H(s)解读
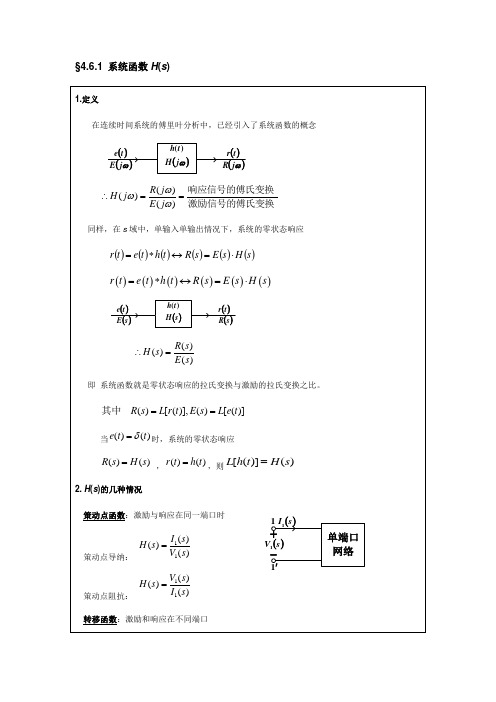
转移导纳: 转移阻抗:
电压比: 电流比:
3.应用
1)利用拉氏变换求系统的响应
2)由H(s)求h(t),或求系统的零状态响应
【例4-6-1】已知系统 ,激励为 ,求系统的冲激响应 和零状态响应
解:
(1)在零起始状态下,对原方程两端取拉氏变换
则
(2) 或
§4.6.1系统函数H(s)
1.定义
在连续时间系统的傅里叶分析中,已经引入了系统函数的概念
同样,在s域中,单输入单输出情况下,系统的零状态响应
即系统函数就是零状态响应的拉氏变换与激励的拉氏变换之比。
当 时,系统的零状态响应
, ,则
2.H(s)的几种情况
策动点函阻抗:
系统函数(网络函数)H(S)

s 3E s Rzs s 2
s
3s 2
零输入响应为:
rzi (t ) 4 e t 3 e2t
t 0
( t 0)
即零状态响应为:
rzs ( t ) 0.5 e 2 t 2 e t 1.5
稳态响应/暂态响应,自由响应/强迫响应
U C ( s) I L ( s) 1 H 2 (s) 2 X ( s) X ( s)( R2 sL) s 2s 2
例:
I 2 ( s) 求下图所示电路的转移 导纳函数Y21 ( s ) 。 1 V1 ( s )
I 3 s
V1 s
1 s 1 s
1
第 7 页
s 2 2s 1 s2
12 s 2 2s 1 Y21 2 s 5s 2 为矩阵的行列式 , 称为网络的特征方程式 ,
反映了H s 的特性。
§4.7 由系统函数零、极点分布决 定时域特性
一.序言
冲激响应h(t)与系统函数H(s) 从时域和变换域两方 面表征了同一系统的本性。 在s域分析中,借助系统函数在s平面零点与极点 分布的研究,可以简明、直观地给出系统响应的许多 规律。系统的时域、频域特性集中地以其系统函数的 零、极点分布表现出来。 主要优点:
第
10 页
1.可以预言系统的时域特性; 2.便于划分系统的各个分量 (自由/强迫,瞬态/稳态); 3.可以用来说明系统的正弦稳态特性。
第
二.H(s)零、极点与h(t)波形特征的对应
11 页
1.系统函数的零、极点
( s z1 )( s z 2 ) ( s z j ) ( s z m ) A( s ) H ( s) K B( s ) ( s p1 )( s p2 ) ( s pk ) ( s pn )
§6.5系统函数
5 10z 2 9 z 3 5 z 3 10z 2 9 z H ( z) 3 1 2 3 1 4z z z z 4z 2 z 1 例2 已知h(k ) 2cos( k ) (k ), 求系统函数H ( z ). 4 2 2 z ( z cos ) 2 z( z ) 4 2 解: H ( z ) 2 z 2 2 z cos 1 z 2 z 1 4
H (e jT ) T 36
z e j 36
cos36 j sin 36 0.4 cos36 j sin 36 0.3
所以系统正弦稳态响应为
0.81 j 0.59 0.4 1.725 23 0.81 j 0.59 0.3
y(k)=17.25cos(628Tk + 7o)
练习:已知系统模拟框图如右图示,
写出系统函数。
z 1 1 H ( z) 1 1 3z z3
信号与系统 3、系统函数H(z)的应用
1)求系统单位冲激响应 h(k):
2)求系统零 状态响应yf(k):
h(k ) Z 1{H z }
y f (k ) Z 1{H z F ( z)}
其中:Mf , My为有限正数
二、稳定性准则(充要条件)
k
h( k ) M
其中:M为有限正数
即:系统的单位序列响应绝对可和,则系统稳定。 可见,系统稳定性取决于系统本身的结构和参数,是系统自身性质之 一。系统是否稳定与激励信号无关。
信号与系统 三、稳定性判断
系统函数
π
2
2π
(wTs )
§2、系统的稳定性
一、因果性:
定义:系统的零状态,响应y f (.) 不出现在激励f(.)之前的系统。 输入在t=0,或k=0加入,即有当t<0或k<0时f(.)=0. 输出在t<0,或k<0时y f (.) 0 为因果系统,否则为非因果系统。 判别条件: 连续系统,冲激响应h(t)=0,t<0;H(s)的收敛域Re[s]>δ,极点在 右半平面。 离散系统,单位序列响应h(k)=0,k<0;H(z)的收敛域 z p0 , 极点在单位圆内。
系统的零级图如图所示,在z平面上复数矢量表示为: e j pi Ai e j
i
e j j B j e
j
j j
Im[z]
bm1B1B2 ...Bme j (1 ... m ) H (e ) H (e j ) e j ( ) j (1 2 ... n ) A1B2 ...An e
H () B() A()
m
其中
bm ( s i )
j 1
分子B(.)等于零的解 零点 分母A(.)等于零的解 极点
Hale Waihona Puke 零极图B( s) H (s) A( s )
(s p )
i i 1
m
H ( z)
B( z ) A( z )
bm ( z i )
j 1
m
极点 Pi 零点 i
(z p )
i i 1
m
(可为实数也可为复数,B(.) A(.)的系数为史书,极点, 零点为复数必为共轭的)
H (S ) 0 注意:对于H(s) 当n>m时 lim 可认为H(s)在无限远处有零点(n-m)个 s 当n<m时 lim H (S ) 可认为H(s)在无限远处有极点(n-m)个 s 对H(s)相同。 即:系统函数H(.)的零点和极点的数目相同,我们只研究n m的情况。
第7章_系统函数

n
a m ( z p i )
i1
第七章 系统函数
7.1 系统函数与系统特性
一、系统函数的零、极点分布图
极(零)点的分布类型:
✓ 一阶实极(零)点:位于 s 或 z 平面的实轴上
✓ 一阶共轭虚极(零)点:位于 s 或 z 平面虚轴上,且对称于实轴
✓ 一阶共轭复极(零)点:位于 s 或 z 平面上,并且对称于实轴
i 1
H(j
)bmB1B2 amA 1A2
Bej(12 m) m
Aej(12 m) m
H(j) bmB1B2 Bm
其中
amA1A2 Am
() (1 2 m ) - (1 2 m )
据模、辐角随 的变化,可绘出幅频特性曲线和相频特性曲线。
第七章 系统函数
7.1 系统函数与系统特性
7.2 系统的因果性与稳定性
二、系统的稳定性
例 y(k)+1.5y(k-1)-y(k-2)= f(k-1) (1) 若为因果系统,求h(k),并判断是否稳定。 (2) 若为稳定系统,求h(k).
解 H ( z ) 1 1 .5 z z 1 1 z 2 z 2 1 z . 5 z 1 ( z 0 .5 z )z ( 2 ) z 0 .4 0 z . 5 z 0 . 4 2 z
称 B() 0 的根 1,2, n为系统函数 H ( ) 的零点 。
第七章 系统函数
7.1 系统函数与系统特性
一、系统函数的零、极点分布图
系统函数可以写为:
m
H (s) B (s) A(s)
bm
(s j)
j1 n
a m ( s p i )
i1
m
H ( z)
B(z)
第七章 系统函数

第七章系统函数系统分类:连续系统离散系统分析方法:时域:h(t)h(k) 冲击响应/单位响应↑逆↑逆复频域: H(s) H(z) 系统函数H(·)↓s = jw↓z =e jwT频域: H(jw) H(e jwT) 频率响应系统的研究:系统分析: 给定系统→H(·)→系统的特性系统综合: 给定要求(如幅频特性)→确定结构和参数→H(·) 本章是在前几章的基础上加以概括和引伸主要内容:一H(·)与系统的特性(时域响应、频域响应)二系统的因果性和稳定性及判别准则三信号流图四系统模拟。
由系统函数→框图§ 7.1 系统函数与系统特性一 H(·)的零点与极点H(·)=)()(••A B 极点:A(·)=0的根,i P ,H(i P )→∞ 零点:B(·)=0的根,i ξ,H(i ξ)=0类型:实数、共轭虚数、共轭复数,一阶或二阶 二 H(·)与时域的响应关系: H(·) h(·)1 连续系统: H(s) h(t) 以虚轴为界结论:○1 H(s)的极点位置→h(t)的函数形式 ○2 极点在左半开平面→h(t)是衰减的,h(t)|∞→t →0,系统是稳定的○3 虚轴上的一阶极点→h(t)是幅度稳定,临界稳定 ○4 极点在右半开,和虚轴上二阶以上→h(t)是增长的, 系统不稳定稳定性:若输入有界,则输出有界。
若|f(·)|<∞,则| y f (·)|<∞ 2 离散系统:H(z) h(k) 以单位圆为界结论:○1 H(z)的极点位置→h(k)的序列形式 ○2 极点在单位圆内→h(k)是衰减的,k →∞,h(k)→0 系统是稳定的○3 单位圆上的一阶极点→h(k)是幅度稳定,临界稳定 ○4 极点在单位圆外,和单位圆上二阶以上→h(k)是增长的,系统不稳定三 极、零点与频率响应的关系: 1 连续系统H (s)=∏∏=-=-ni i p s mj j s m b 1)(1)(ξ 设极点都在左半开平面,收敛域含虚轴H (j ω)= H (s)|s=jw =∏∏=-=-ni i p jw mj j jw m b 1)(1)(ξ 画幅频、相频特性下面用矢量分析法分析,主要是定性分析其变化规律矢量:p i | p i | j ω |ω| 差矢量: j ω- p i 幅角i ϕ 幅角2π令 j ω- p i =A i ij e θ j ω-ζi =B j jj e ψH (j ω)=)(21)(212121n m j e n A A A j e m B B B m b θθθψψψΛΛΛΛ++++=H (ω)=nA A A mB B B m b ΛΛ2121 )(ωϕ=(m ψψψΛ++21)- (n θθθΛ++21)ω从0~∞时,可得到其幅频特性和相频特性曲线例7.1-1 研究RC 低通网络电压转移函数的频率响应H(j ω)=)(1)(2ωωj U j U解:H (s)=SCR SC 11+=RC S RC 111+• 极点S= - RC 1H (j ω)=RCj RC111+ω令θωj Ae RCj =+1A=2)1(2RC +ω θ=arctg ωcR H (ω)=ARC 11 )(ωϕ=0-θ= - arctg ωcR 定性分析:ω从0~∞时,A 单调增大,θ从0~2π H (ω)单调下降,)(ωϕ从0~ - 2π例7.1-2 典型的二阶系统,RLC 串联电路,求动点导纳y(s)=)(1)(1s U s I 的频率特性 解:H (s) =2022ωα++s s s =)2)(1(p s p s s-- 设α>0,ω02 >α2零点:s=0极点:p 1,2 = -220αωα-±j =-βαj ± 其中:Lr2=α 衰减因素 220αωβ-= LC10=ω 谐振角频率只讨论α<ω0时的频率响应,先画极、零图H (j ω)=)2)(1(p j p j j --ωωω=)(2121θθψ--•j e A A BH (ω) =21A A B)21()(θθψωϕ--= 定性分析:ω从0~∞○1 ω=0 B=0,A 1=A=ω 21θθ-= 2πψ=y (ω)=0 2)(πωϕ=ω↑ B 和A 2↑ A 1↓ 21θθ+↑ 2πψ=y (ω) ↑ )(ωϕ↓○2 ω=ω0 y (ω)=α21为极大值 0)(=ωϕ 221πθθ=+ ω↑ B 、A 2、A 1↑ y (ω) ↓ 21θθ+↑ )(ωϕ↓○3ω→∞ y (ω)→0 πθθ=+21 2)(πωϕ-=全通函数: |H(j ω)|为常数设有二阶系统H(s),左半平面有一对极点p 1,2 = -βαj ± 右半平面有一队零点ξ1,2 =βαj ±H(s)=)2)(1()2)(1(p s p s s s ----ξξH(j ω)=)2)(1()2)(1(p j p j j j ----ωωξωξω=)(21212121θθψψ--+•j e A A B B 由图:对所有ω,有A 1= B 1 A 2 =B 2∴ |H(j ω)|= 2121A A BB =1结论:凡极点位于左半开平面,零点位于右半开平面,且以j ω轴镜像对称,此系统函数即为全通函数 最小相移函数零点位于左半开平面的系统函数,其相频特性)(ωϕ最小 一阶 p 1,2 = βj e ± H(z)=ββj ez z k j e z z k --+-*11 共轭极点 h(k)=2|k 1|cos (βk+θ)·u (k)二阶实或共轭: h(k)= Ck ·u (k) k ↑ h(k)↑ (二阶以上同) h(k)=Ckcos (βk+θ)·u (k) k →∞ h(k)→∞ (3) 极点在单位圆外:|a|>1一阶实极点 p=a ,h(k)=a k ·u (k) k ↑ 一阶共轭极点:p=a βj e ± h(k)=C a k cos (βk+θ)·u (k) h(k)↑ 高阶情况同上结论:A H(z)的零、极点决定 h(k) 形式由极点决定幅度和相角由零、极点共同决定B 单位圆内的极点,h(k)为衰减序列,k →∞ h(k)→0,暂态分量C 单位圆上的一阶极点,h(k)为等幅序列,k →∞ h(k)有限值,稳态分量D 单位圆上的二阶及以上极点 h(k)为等幅序列 单位圆外的极点 k →∞ h(k)→∞ 2 离散系统:H(z)零、极点H(T j e ω)关系H(z)=∏∏=-=-ni i p z mj j z m b 1)(1)(ξ 若极点均为单位圆内,收敛域含单位圆频率响应:H(T j e ω)=∏∏=-=-n i i p j m j j j m b 1)(1)(ωξω=∏∏==n i j e i A mj j e j B m b i j11θψ=)(21)(212121nm j e n A A A j e m B B B m b θθθψψψΛΛΛΛ++++=H d (ω) )(ωϕdj e幅频:H d (ω)= H(T j e ω)=nA A A mB B B m b ΛΛ2121相频:)(ωϕd =(m ψψψΛ++21)- (n θθθΛ++21) 分析:ωT 从0~2π,即ω从0~Tπ2,z 由z=1沿单位圆逆时针方向旋转一周。
§4-5 系统函数

C= 1 4L
V2 (s) = s2 +
s s+
1
=
s s2 + 4s + 4
=
s (s + 2)2
=
(s
A12 + 2)2
+
A11 (s + 2)
RC LC
A12 = (s + 2)2V2 (s) |s=−2 = −2
A11
=
d ds
[(s
+
2)2
V2
(
s)]s
= −2
=1
∴
V2 (s)
=
−2 (s + 2)2
h ( t ) = ℒ -1{ H ( s )}
一般的,系统函数是有理分式,于是
M
∏∏ ∑ h (t )
=ℒ
N (s)
-1{
}
D (s)
=ℒ
A (s − zk )
-1 {
k =1 N
}
(s − pk )
=ℒ
N
-1{
Ak }
k=1 s − pl
N
k =1
∑ = Akepktu(t)
k =1
上式中,zk与pk分别是系统函数零点与极点,零点与极点在s平面上 的位置不同,对单位冲激响应的影响不同。
=
Y(s) X (s)
=
s2
s+3 + 3s +
2
求系统函数的拉氏反变换,即是系统的单位冲激响应。
H(s) =
s2
s+3 + 3s + 2
=
s+3 (s +1)(s + 2)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CreateEvent函数功能描述创建或打开一个命名的或无名的事件对象函数原型HANDLE CreateEvent(LPSECURITY_ATTRIBUTES lpEventAttributes, // 安全属性BOOL bManualReset, // 复位方式BOOL bInitialState, // 初始状态LPCTSTR lpName // 对象名称);参数lpEventAttributes:[输入]一个指向SECURITY_ATTRIBUTES结构的指针,确定返回的句柄是否可被子进程继承。
如果lpEventAttributes是NULL,此句柄不能被继承。
Windows NT/2000:lpEventAttributes的结构中的成员为新的事件指定了一个安全符。
如果lpEventAttributes是NULL,事件将获得一个默认的安全符。
bManualReset:[输入]指定将事件对象创建成手动复原还是自动复原。
如果是TRUE,那么必须用ResetEvent函数来手工将事件的状态复原到无信号状态。
如果设置为FALSE,当事件被一个等待线程释放以后,系统将会自动将事件状态复原为无信号状态。
bInitialState:[输入]指定事件对象的初始状态。
如果为TRUE,初始状态为有信号状态;否则为无信号状态。
lpName:[输入]指定事件的对象的名称,是一个以0结束的字符串指针。
名称的字符格式限定在MAX_PATH之内。
名字是对大小写敏感的。
如果lpName指定的名字,与一个存在的命名的事件对象的名称相同,函数将请求EVENT_ALL_ACCESS来访问存在的对象。
这时候,由于bManualReset和bInitialState参数已经在创建事件的进程中设置,这两个参数将被忽略。
如果lpEventAttributes是参数不是NULL,它将确定此句柄是否可以被继承,但是其安全描述符成员将被忽略。
如果lpName为NULL,将创建一个无名的事件对象。
如果lpName的和一个存在的信号、互斥、等待计时器、作业或者是文件映射对象名称相同,函数将会失败,在GetLastError函数中将返回ERROR_INVALID_HANDLE。
造成这种现象的原因是这些对象共享同一个命名空间。
终端服务(Terminal Services):名称中可以加入"Global\"或是"Local\"的前缀,这样可以明确的将对象创建在全局的或事务的命名空间。
名称的其它部分除了反斜杠(\),可以使用任意字符。
详细内容可参考Kernel Object Name Spaces。
Windows 2000:在Windows 2000系统中,没有终端服务运行,"Global\"和"Local\"前缀将被忽略。
名称的其它部分除了反斜杠(\),可以使用任意字符。
Windows NT 4.0以及早期版本, Windows 95/98:名称中除了反斜杠(\),可以使用任意字符。
返回值如果函数调用成功,函数返回事件对象的句柄。
如果对于命名的对象,在函数调用前已经被创建,函数将返回存在的事件对象的句柄,而且在GetLastError函数中返回ERROR_ALREADY_EXISTS。
如果函数失败,函数返回值为NULL,如果需要获得详细的错误信息,需要调用GetLastError。
备注:调用CreateEvent函数返回的句柄,该句柄具有EVENT_ALL_ACCESS权限去访问新的事件对象,同时它可以在任何有此事件对象句柄的函数中使用。
在调用的过程中,所有线程都可以在一个等待函数中指定事件对象句柄。
当指定的对象的状态被置为有信号状态时,单对象等待函数将返回。
对于多对象等待函数,可以指定为任意或所有指定的对象被置为有信号状态。
当等待函数返回时,等待线程将被释放去继续运行。
初始状态在bInitialState参数中进行设置。
使用SetEvent函数将事件对象的状态置为有信号状态。
使用ResetEvent函数将事件对象的状态置为无信号状态。
当一个手动复原的事件对象的状态被置为有信号状态时,该对象状态将一直保持有信号状态,直至明确调用ResetEvent函数将其置为无符号状态。
当事件的对象被置为有信号状态时,任意数量的等待中线程,以及随后开始等待的线程均会被释放。
当一个自动复原的事件对象的状态被置为有信号状态时,该对象状态将一直保持有信号状态,直至一个等待线程被释放;系统将自动将此函数置为无符号状态。
如果没有等待线程正在等待,事件对象的状态将保持有信号状态。
多个进程可持有同一个事件对象的多个句柄,可以通过使用此对象来实现进程间的同步。
下面的对象共享机制是可行的:·在CreateEvent函数中,lpEventAttributes参数指定句柄可被继承时,通过CreateProcess函数创建的子进程继承的事件对象句柄。
·一个进程可以在DuplicateHandle函数中指定事件对象句柄,从而获得一个复制的句柄,此句柄可以被其它进程使用。
·一个进程可以在OpenEvent或CreateEvent函数中指定一个名字,从而获得一个有名的事件对象句柄。
使用CloseHandle函数关闭句柄。
当进程停止时,系统将自动关闭句柄。
当最后一个句柄被关闭后,事件对象将被销毁。
编辑本段使用环境Windows NT/2000:需要3.1或更高版本Windows 95/98:需要Windows 95或更高版本头文件:定义在Winbase.h;需要包含 Windows.h。
导入库:user32.libUnicode:在Windows NT/2000中,以 Unicode 和 ANSI 执行一个Event被创建以后,可以用OpenEvent()API来获得它的Handle,用CloseHandle() 来关闭它,用SetEvent()或PulseEvent()来设置它使其有信号,用ResetEvent()来使其无信号,用WaitForSingleObject()或WaitForMultipleObjects()来等待其变为有信号.PulseEvent()是一个比较有意思的使用方法,正如这个API的名字,它使一个Event对象的状态发生一次脉冲变化,从无信号变成有信号再变成无信号,而整个操作是原子的.对自动复位的Event对象,它仅释放第一个等到该事件的thread(如果有),而对于人工复位的Event对象,它释放所有等待的thread.参考:/ce%5Fken/blog/item/01eac024d46aff328744f9f2.htmlShmat#include <sys/shm.h>void *shmat(int shmid, const void *shmaddr, int shmflg);函数shmat将标识号为shmid共享内存映射到调用进程的地址空间中,映射的地址由参数shmaddr和shmflg共同确定,其准则为:(1) 如果参数shmaddr取值为Null,系统将自动确定共享内存链接到进程空间的首地址。
(2) 如果参数shmaddr取值不为Null且参数shmflg没有指定SHM_RND标志,系统将运用地址shmaddr链接共享内存。
(3) 如果参数shmaddr取值不为Null且参数shmflg指定了SHM_RND标志位,系统将地址shmaddr对齐后链接共享内存。
其中选项SHM_RND的意思是取整对齐,常数SHMLBA代表了低边界地址的倍数,公式“shmaddr - (shmaddr % SHMLBA)”的意思是将地址shmaddr移动到低边界地址的整数倍上。
详细出处参考:/content-detail/517991.htmlSetErrorMode可以设置进程的错误模式,其定义如下:UINT WINAPI SetErrorMode(__in UINT uMode);uMode是错误模式,其取值可以为以下几种:Value Meaning0 Use the system default, which is to display all error dialog boxes.SEM_FAILCRITICALERRORS 0x0001 The system does not display the critical-error-handler message box. Instead, the system sends the error to the calling process.SEM_NOALIGNMENTFAULTEXCEPT 0x0004 The system automatically fixes memory alignment faults and makes them invisible to the application. It does this for the calling process and any descendant processes. This feature is only supported by certain processor architectures. For more information, see the Remarks section.After this value is set for a process, subsequent attempts to clear the value are ignored.SEM_NOGPFAULTERRORBOX 0x0002 The system does not display the general-protection-fault message box. This flag should only be set by debugging applications that handle general protection (GP) faults themselves with an exception handler.SEM_NOOPENFILEERRORBOX 0x8000 The system does not display a message box when it fails to find a file. Instead, the error is returned to the calling process.WSADATAWSADATA 这个结构被用来存储被WSAStartup函数调用后返回的 Windows Sockets 数据。