大学版智能机器人MT-URobot 使用说明书
先诺智能机器人使用说明书

先诺智能机器人使用说明书
1、电源开关按钮:ON/OFF电源。
2、下载程序连接端口:将程序下到机器人的主板CPU时使用。
3、电源连接端口:连接电源,为机器人提供动能的部分。
注:1.电源正负极不可接反,否则会烧掉主板。
2.若打开电源开关,指示灯不亮或不正常时,请迅速关闭电源。
4、3.3V电源指示灯:打开电源后,该指示灯常亮。
5、5V电源指示灯:打开电源后,该指示灯常亮。
6、直流电机一的输出端口:插上直流电机的电源连接器,使电机运行的部分。
7、直流电机二的输出端口:插上直流电机的电源连接器,使电机运行的部分。
一触挨网 emotionally intelligent robot音频配置手册说明书
One Touch with Hub 用户手册单击这里以访问本文档的最新在线版本。
您还将找到最新的内容,以及可扩展的说明、更轻松的导航和搜索功能。
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Contents1欢迎使用包装内容最低系统需求视图2入门教程连接电源连接到电脑设置 One Touch with Hub 3使用 Toolkit 来启用安全功能等启用安全功能开始备份计划(仅限 Windows )设置镜像文件夹4格式化和分区(可选)选择文件系统格式格式化说明5从您的计算机安全移除设备Windows Mac 6常见问题. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 端口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 操作系统. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 最低可用磁盘空间. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 正面. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 返回. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 在这里开始. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 注册您的设备. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 下载 Toolkit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 安装 Toolkit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 同时兼容 Windows 和 Mac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 针对 Windows 优化性能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 针对 macOS 优化性能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 了解更多. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 通过 Finder 窗口退出. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 通过桌面退出444444445667888991111111112121212121313141414141415. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .全部用户Windows Mac 7Regulatory Compliance China RoHS Taiwan RoHS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 问题:我的文件传输速度太慢. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 问题:我的计算机只有 USB-C 端口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 问:我必须为我的 USB 设备使用 USB 集线器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 问题:所提供的 USB 连接线太短. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 问题:我收到文件传输错误消息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 问题:计算机上没有出现硬盘的图标. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 问题:硬盘的图标没有出现在我的桌面上15151515161616161717181818欢迎使用包装内容®Seagate One Touch with Hub电源适配器 (18W)USB 3.0 连接线(USB Micro-B 转 USB-A)快速入门指南最低系统需求端口可将 Seagate 设备连接到配备 USB-A 端口的计算机。
机器人操作指南-图文-doc资料

第七章工业机器人应用一机器人示教单元使用1.示教单元的认识2.使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。
再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。
然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。
按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。
各轴对应动作方向好下图所示。
当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。
2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL 调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:直交调整模式TOOL调整模式三轴直交调整模式圆桶调整模式2.4 在手动运行模式下按“HAND”进入手爪控制界面。
在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900——OUT-907进行控制,与之相应的还有八路输入信号IN-900——IN-907,以上各I/O信号可在程序中进行调用。
按键“+C”和“-C”对应“OUT-900”和“OUT-901”按键“+B”和“-B”对应“OUT-902”和“OUT-903”按键“+A”和“-A”对应“OUT-904”和“OUT-905”按键“+Z”和“-Z”对应“OUT-906”和“OUT-907”在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。
对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。
智能机器人使用手册说明书
User ManualPrecautions!Precautions for BatteriesThe batteries (battery pack or batteries installed) shall not be exposed to excessive heat such as sunshine, fire or the like.Only use attachments/accessories specified or provided by the manufacturer (such as the exclusive supply adapter, battery etc).Do not touch the product when it is moving to avoid hand injuries.1.2.3.All example of use refer to warning card.Keep this product away from fire and keep it dry and clean.Do not squeeze this product with too much force during use.Please use the robot on a flat surface.Maintain an appropriate distance from the robot while it is in operation to avoid injuries.When the robot is in operation, do not forcibly bend its joints as to avoid hand injuries and damage to the machine.Please use the supplied charger for charging the robot.The servos for robot joints are precisely designed and should not be disassembled without authorization. Contact us if necessary.For repair services, go to your local after-sales service center or contact our customer support.When an abnormality is found during debugging, immediately press the Emergency Stop button and cut off the power as to avoid hand injuries and damage to the machine.Take necessary preventive measures when using the robot. Do not use it at heights or near any edges as it may fall off and result in damage.Man-made damage is not covered by our warranty.It is best to use the robot for no longer than 1 hour each time, which will extend the service life of the servo actuators.This product is not intended for children under 14 years of age.You will be provided with software updates if any. For some features, the latest update instruction shall prevail.Please use HDMI cables with good shielding layers and magnetic rings when connecting Yanshee to an external monitor.1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15.16.Immediately Cut off the power and contact us when:Warning:EmergencyStop buttonCAUTION: Danger of explosion if battery is incorrectly replaced. Replace only with the same or equivalent type.Disposal of a battery into fire or a hot oven, or mechanically crushing or cutting of a battery, that can result in an explosion.Leaving a battery in an extremely high temperature surrounding environment that can result in an explosion or the leakage of flammable liquid or gas.A battery subjected to extremely low air pressure that may result in an explosion or the leakage of flammable liquid or gas.a. The robot smokes or you smell something burning; orb. Water or any other foreign matter enters the robot; orc. The robot is damaged.The User Manual contains important information. Please keep it for future reference!4.5.6.An "Emergency Stop" button is on the top of the robot. When the robot is in operation, you can press this button to immediately cut off the power and stop its operation.01. Packing ListYanshee RobotUser Data Set*1(Quick Start Guide*1,Warranty Card*1)Yanshee Robot components: 1Quick Start Guide: 1Warranty card: 1Battery: 1Power adapter: 1Power cord: 1Spare parts kit: 1 (wires, screws)Screwdriver: 1Charging dock: 1 (Selective Accessories)Sensor Suite: 1 (Selective Accessories)Usage Examples: 1Front view of YansheeBackside view of YansheeIntroduction to GPIO Extended Port Note:Ports 3, 5, 12, 35, 38 and 40 are used, of which ports 3 and 5 are for I2C communication and ports 12, 35, 38 and 40 are for audio I2S signaling.GPIO Pinout DiagramPhysicalPin No.Function Function03. SpecificationsAppearanceElectrical SpecificationsConstructionHumanoid Product ModelERHA101Product NameYanshee ColorSilver Dimensions 370*192*106 (mm)Weight ≈2.05 kgServo Actuators 17 degrees of freedom (DOF)Operating voltage DC 9.6VPower 4.5W~38.4WPower adapterOperating temperature Material Aluminum alloy structure, PC+ABS housing0℃ to 40℃Input: 100V ~240V, 50/60Hz 1.5AOutput: 9.6V, 4AMaster Chip and MemoryNetworkVision SystemSTM32F103VDT6Broadcom BCM2837 1.2GHz 64-bit quad-core ARMv8 Cortex-A53RAM 1GBProcessorMemory 16GBBluetoothBluetooth 4.1Battery capacity 3000mAhCamera 8 mega-pixel camera, fixed focusLightWi-Fi Operating system RaspbianSupports Wi-Fi2.4G802.11b/g/n fast connectEyes: 3-color LED lights *2Chest: 3-color LED notification lights *3Microphone: green indicator *1Charge: dual-color indicator *1AudioSensorsDebugging PortOthers MicrophoneSingle SpeakerStereo speakers *29-axle motion tracking sensor *1Motherboard temperature sensor *1POGO 4PIN *6Built-in sensorExtended port HDMI1GPIO40 (6 of them are used)USB2Control Mode Mobile software (APP); voice control;PC control (Raspbian )KeysFor BT :Maximum OutputPower :5.636 dBmFor 2.4G WIFI :Maximum Output Power : 18.19dBm ON/OFF key on the chest;Emergency Stop key on the top Applicable Standard04. Download and Sign in to Mobile Software (APP)Download the APP:Sign in:APP Download QR Code YansheeMethod 1: Scan the QR code below to enter the APPdownload page where you can click to download theYanshee APP;Method 2: Search and download "Yanshee" in APPStore/Google Play/MyAPP or other platforms.After installing the APP, run the APP and sign in according to the instruction. If you are a registered user, log into the APP directly.Method 3: Log onto /en to searchfor your desired product and download the app.05. Assemble the RobotOpen and log into the APP. Select the assembly tutorial to learn about how to assemble or disassemble the robot from the menu bar.Select the disassembly tutorial to learn about how to disassemble the robot.06. Install and Charge the BatteryInstall the Battery• The battery compartment is below the left arm of the robot. Rotate the battery cover clockwise 90° to unlock it.• Install the battery into the battery cover and then reinstall the battery cover. Rotate the battery covercounter-clockwise 90° to lock it.Charge the BatteryMethod 1: After installing the battery, connect the power cord to the charge port on the back of the robot to charge the battery.07. Start the Robot and Set up the Network Method 2: Place the battery onto the dock charger, and then connect the power cord to the charge port of the dock charger to charge the battery.• Press and hold the button on the chest for 2-3 seconds and release until the indicator is lit up in blue. The robot is booted up after you hear a boot-up sound.• Make sure that both the Bluetooth and Wi-Fi are enabled on the smart devices. Open and log into the Yanshee APP, and click the icon on the upper left of the home screen to connect the robot and set up the network.• Refresh and search devices detected by the system, and select the device to be connected according to the last 4 digits of the MAC address value on the label attached ontothe back of the robot.• After the desired device is selected, the APP will selectthe SSID identical to the local Wi-Fi to be displayed on thepage. Enter the correct Wi-Fi password and click the"Join" button, the robot will set up and connect to thenetwork and also give you a voice prompt, saying"Connecting".Note:You will hear a voice prompt saying "Connected" after successful connection.If the connection fails, you will hear a voice prompt saying, "Connection Failed". In this case, please set up the network again.You do not have to set up the network again for later use, just directly select the desired device from the list.After setting up the network, you can use the APP to controlthe robot and learn more information.08. Use of Mobile APPFall-over ManagementThe mobile APP has a built-in graphic user interface and integrates features including motion tracking, FPV, Blockly visual programming, action readback programming, curriculums, BBS and real-time sensor data view.This feature is off by default. You can enable the feature via the APP. The robot can pick itself up if it falls over whenenabled.Language SwitchingBoth Simplified Chinese and English are supported so far. Goto your APP to select the desired language for the robot.09. Built-in Smart ApplicationsRaspbian OS issued by Raspberry Pi is used as the robot software. This open source software comes with the following features:Speech RecognitionThe robot is configured with speech recognition and semantic recognition for Chinese, allowing you to chat with it.When the robot started, press the button on the chest until the chest lamp turns green, then you can chat with the robot after a "tinkling" sound is heard.Visual ProcessingThe robot is configured with face analysis, face tracking and other features. You can call these functions through the programming tools in the APP or Raspberry Pi system. UBTECH provides the Open SDK API, which enables you to configure your own visual identification functions withthird-party visual identification platforms.Note: please abide by relevant laws when using thethird-party voice platform.Auto Update:After the robot is connected to the Internet, the built-in platform software will automatically detect whether you have the latest version and execute the update process.Do not cut off the power or disconnect from the Internet while updating.10. Open Source Platform(2). Use the USB port on the Yanshee to connect a USB, keyboard and mouse.The Yanshee robot is built on the Raspberry Pi open source platform and open SDK files are provided, allowing a user to configure, learn or develop smart Applications as desired, and also allowing developers to create their own robot.(1). Use an HDMI cable to connect the Yanshee robot to amonitor.(3). You can log onto the Linux system from Raspberry Pi bysimply starting the robot.(4). SDK API and Demo codes are available from(5). For developers, please visit https://to learn more information about Raspberry Pi./enThis device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation.Note: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy, and if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:• Reorient or relocate the receiving antenna.• Increase the separation between the equipment and receiver.• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.• Consult the dealer or an experienced radio/TV technician for help.FCC Caution:Any changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to operate this equipment.IMPORTANT NOTE:FCC Radiation Exposure Statement:This equipment complies with FCC radiation exposure limits should be installed and operated with minimum distance20cm between the radiator & your body.This transmitter must not be co-located or operating in conjunction with any other antenna or transmitter.FCC ID: 2AHJX-YANSHEE-1UBTECH ROBOTICS CORP LTDAdd: 16th & 22nd Floor, Block C1, Nanshan i Park, No. 1001 Xueyuan Road, Nanshan District, Shenzhen City, China P.R.T el: 800-276-61372019-09-25尺寸:95*130mm颜色:四色双面印刷材质:105g铜版纸工艺:骑马钉公差:±0.5mm。
机器人实训

目录一、大学版智能机器人简介二、实训项目项目一、智能机器人工作环境项目二、机器人的基本运动控制1、机器人走正方形2、机器人变速前进项目三、基于红外线传感器机器人项目四、基于碰撞开关的避障机器人三.实训心得机器人简介1.机器人产生介绍机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果。
美国是机器人的诞生地,早在1962年就研制出世界上第一台工业机器人,比起号称"机器人王国"的日本起步至少要早五六年。
那么什么是机器人呢?人们一般的理解来看,机器人是具有一些类似人的功能的机械电子装置,或者叫自动化装置,它仍然是个机器,它有三个特点,一个是有类人的功能,比如说作业功能,感知功能,行走功能,还能完成各种动作,它还有一个特点是根据人的编程能自动的工作,这里一个显著的特点,就是它可以编程,改变它的工作、动作、工作的对象,和工作的一些要求,它是人造的机器或机械电子装置。
但从完整的更为深远的机器人定义来看,应该更强调机器人智能,所以人们又提出来机器人的定义是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的这种机器。
那么这给机器人提出来更高层次的要求,展望21世纪,机器人将是一个与20世纪计算机的普及一样,会深入地应用到各个领域,在21世纪的前20年是机器人从制造业走向非制造业的发展一个重要时期,也是智能机器人发展的一个关键时期。
2.大学版智能机器人结构:机器人一般由执行机构、驱动装置、检测装置和控制系统等组成。
机器人的组成部分也可划分为硬件与软件两部分,其中软件包括控制规则与控制接口。
3.1大学版智能机器人控制部分:主板盒外观图3.1.1控制部分内容:功能介绍~电源开关:用来打开和关闭机器人。
~充电插座:充电。
(显示欠压报警则应充电。
)~下载口:将编辑好的程序下载到机器人的主板上。
下载线的一端接计算机另一端接机器人。
~备用电源:电池发生损坏或无法充电时,即可使用备用电源。
Smart Robot详细使用手册5.1.3

Android智能设备自动化测试工具Smart Robot详细使用手册V5.1.3内容提要♦本操作手册旨在帮助用户了解Smart Robot软件的全部功能。
♦内容包括Smart Robot的全部功能,文档主要面向自动化测试小组成员和实际使用自动化测试用例的相关人员。
版权所有2012 东舟软件,保留所有权利2013年04月未经北京东舟软件有限公司书面许可,本文档任何部分的内容不得被复制或抄袭用于任何目的。
本白皮书最后修订日期为2013年04月10日,其内容在未经通知的情形下可能会发生改变,敬请留意东舟软件官方网站()目录1.Smart Robot产品概述 (6)1.1什么是Smart Robot (6)1.2Smart Robot软件特点 (7)2.如何获得Smart Robot安装包及许可 (8)3.软件安装和启动 (9)3.1安装Smart Robot (9)3.2激活Smart Robot (10)3.3启动Smart Robot (11)3.4Smart Robot界面介绍 (11)4测试用例 (13)4.1功能介绍 (13)4.2进入测试用例界面 (13)4.3制作用例的三种方式 (14)录制 (14)手工编辑动作 (18)编写脚本 (22)4.4插入录制脚本 (22)4.5界面探索器 (22)4.6制作用例注意事项 (23)什么样的测试脚本需要调整 (23)怎样调整测试脚本 (23)注意事项表 (24)4.7测试用例的调试和发布 (25)4.8功能按钮说明 (26)4.9指令说明 (27)4.10测试用例编写进阶 (30)5功能测试 (30)5.1功能介绍 (30)5.2进入功能测试视图 (30)5.3添加功能测试任务 (30)5.4执行功能测试任务 (32)5.5定位问题 (34)6稳定性测试 (35)6.1功能介绍 (35)6.2进入稳定性测试视图 (36)6.3添加稳定性测试任务 (36)6.4执行稳定性测试任务 (37)6.5定位问题 (39)7压力测试 (40)7.1功能介绍 (40)7.2进入压力测试视图 (40)7.3执行压力测试 (41)7.4查看测试结果 (42)7.5压力测试参数说明 (42)8功耗测试 (43)8.1功能介绍 (43)8.2进入功耗测试视图 (44)8.3执行功耗测试 (44)8.4查看测试结果 (44)9性能测试 (45)9.1功能介绍 (45)9.2进入性能测试视图 (45)9.3执行性能测试 (46)9.4查看测试结果 (46)10外场测试 (47)10.1功能介绍 (47)10.2进入外场测试视图 (47)10.3执行外场测试 (48)10.4查看动态场测结果 (48)10.5查看静态场测结果 (49)11测试工具箱 (50)11.1进入测试工具箱 (50)11.2随手录放 (51)11.3普通应用签名 (52)11.4系统应用签名 (53)12系统管理 (54)12.1进入系统管理视图 (54)12.2区域管理 (55)12.3签名管理 (55)12.4用户管理 (56)12.5权限管理 (58)12.6软件包管理 (59)1.S mart Robot产品概述1.1什么是Smart Robot近年来,随着智能操作系统的快速发展,越来越多的手机、平板等智能终端厂商及应用提供商专注于智能终端及应用的研发。
智能机器人操作手册

智能操作手册第一章:概述 (3)1.1 智能简介 (3)1.2 操作手册目的与适用范围 (3)第二章:硬件设备 (4)2.1 主机结构 (4)2.1.1 外观设计 (4)2.1.2 内部结构 (4)2.1.3 接口与扩展 (4)2.2 传感器介绍 (4)2.2.1 视觉传感器 (4)2.2.2 激光传感器 (5)2.2.3 触觉传感器 (5)2.2.4 音频传感器 (5)2.3 驱动系统 (5)2.3.1 驱动器 (5)2.3.2 控制器 (5)2.3.3 通信协议 (5)2.3.4 供电系统 (5)第三章:软件平台 (5)3.1 操作系统 (5)3.1.1 系统概述 (5)3.1.2 系统版本 (6)3.1.3 系统功能 (6)3.2 应用程序安装与卸载 (6)3.2.1 应用程序安装 (6)3.2.2 应用程序卸载 (6)3.3 系统设置与优化 (6)3.3.1 系统设置 (6)3.3.2 系统优化 (6)第四章:基本操作 (7)4.1 开机与关机 (7)4.1.1 开机操作 (7)4.1.2 关机操作 (7)4.2 系统唤醒与休眠 (7)4.2.1 唤醒操作 (7)4.2.2 休眠操作 (7)4.3 用户界面操作 (7)4.3.1 主界面 (7)4.3.2 功能区 (8)4.3.3 设置菜单 (8)4.3.4 应用操作 (8)第五章:功能应用 (8)5.1 语音识别与交互 (8)5.1.1 功能概述 (8)5.1.2 语音识别原理 (8)5.1.3 交互流程 (8)5.2 智能导航 (9)5.2.1 功能概述 (9)5.2.2 导航原理 (9)5.2.3 导航流程 (9)5.3 视觉识别 (9)5.3.1 功能概述 (9)5.3.2 识别原理 (9)5.3.3 识别流程 (9)第六章:安全与维护 (10)6.1 安全措施 (10)6.1.1 操作安全 (10)6.1.2 环境安全 (10)6.2 定期检查与保养 (10)6.2.1 检查周期 (10)6.2.2 检查内容 (10)6.2.3 保养措施 (11)6.3 故障处理 (11)6.3.1 故障分类 (11)6.3.2 故障处理方法 (11)第七章:网络连接 (11)7.1 网络配置 (11)7.1.1 配置要求 (11)7.1.2 配置步骤 (11)7.1.3 注意事项 (12)7.2 远程控制 (12)7.2.1 远程控制功能 (12)7.2.2 远程控制设置 (12)7.2.3 注意事项 (12)7.3 数据同步与备份 (12)7.3.1 数据同步 (12)7.3.2 数据备份 (13)7.3.3 注意事项 (13)第八章:编程与扩展 (13)8.1 编程环境 (13)8.1.1 环境配置 (13)8.1.2 环境搭建 (13)8.2 常用编程接口 (13)8.2.1 控制接口 (13)8.2.3 执行器接口 (14)8.3 扩展功能开发 (14)8.3.1 扩展功能概述 (14)8.3.2 扩展功能开发流程 (14)8.3.3 扩展功能开发注意事项 (14)第九章:故障排除 (15)9.1 常见问题解答 (15)9.1.1 无法启动 (15)9.1.2 运动异常 (15)9.1.3 无法识别指令 (15)9.2 软件故障处理 (15)9.2.1 系统崩溃 (15)9.2.2 系统升级失败 (15)9.2.3 应用程序错误 (15)9.3 硬件故障处理 (16)9.3.1 传感器故障 (16)9.3.2 驱动器故障 (16)9.3.3 机械结构故障 (16)第十章:附录 (16)10.1 技术参数 (16)10.1.1 硬件参数 (16)10.1.2 软件参数 (16)10.2 相关法规与标准 (17)10.2.1 国家法规 (17)10.2.2 国际法规与标准 (17)10.3 常用术语解释 (17)第一章:概述1.1 智能简介智能是一种集成了人工智能技术的,它能够通过传感器、控制器和执行器等部件,实现对环境的感知、决策和执行任务的能力。
TM ROBOT 使用手册说明书

TM ROBOT使用手册上海一者信息科技有限公司目录1TM ROBOT (1)1.1简介 (1)1.2主要特点 (1)2界面描述 (2)2.1我的记忆库 (2)2.1.1新建记忆库 (2)2.1.2我的记忆库列表 (3)2.1.3查看记忆库详情 (5)2.1.4编辑记忆库 (7)2.1.5导入记忆库 (8)2.1.6导出记忆库 (10)2.1.7清空记忆库 (10)2.1.8删除记忆库 (11)2.1.9共享记忆库 (12)2.1.10查看共享 (14)2.2我的共享 (15)2.2.1新建共享 (15)2.2.2我的共享列表 (17)2.2.3查看共享 (17)2.2.4取消共享 (17)2.2.5重新共享 (18)2.2.6共享收益 (19)2.3文件分析 (19)2.4TMX分割 (21)2.5消息中心 (22)2.6高级设置 (23)2.7版本更新 (23)3如何利用TM ROBOT共享语料 (24)4如何在使用CAT工具时匹配共享语料 (26)4.1商城设置 (26)4.2余额充值 (27)4.3下载并安装Tmxmall Plugin 3.2 (28)4.4设置插件账号和API Key (29)4.5使用效果 (30)4.6其他说明 (30)5交易记录及结算系统 (31)1TM ROBOT1.1简介TM ROBOT客户端是上海一者信息科技有限公司研发的集记忆库本地管理、语料共享、文件分析及TMX分割功能于一体的语料管理与增值产品。
该产品技术先进、操作简单,让您轻松管理翻译记忆库的同时实现语料快速、持续增值。
Tmxmall语料商城云平台与TM ROBOT客户端构成的P2P语料共享平台开创了语料共享新模式。
图1-1 TM ROBOT启动界面1.2主要特点●快速实现本地记忆库实时检索、导入、合并、编辑、导出等操作,记忆库管理更便捷。
●语料一键共享,无需将语料上传至云端,即可实现一键共享,交易语料的同时保障语料的私密性与安全性。
智能教育机器人使用手册

智能教育使用手册第一章:产品概述 (3)1.1 产品简介 (3)1.2 功能特点 (3)1.2.1 个性化学习辅导 (3)1.2.2 语音识别与交互 (4)1.2.3 海量教育资源 (4)1.2.4 智能推荐与辅导 (4)1.2.5 互动式教学 (4)1.2.6 数据分析与反馈 (4)1.2.7 离线使用 (4)1.2.8 安全可靠 (4)第二章:设备安装与配置 (4)2.1 开箱检查 (4)2.2 设备连接 (5)2.3 系统配置 (5)第三章:基本操作 (6)3.1 开机与关机 (6)3.1.1 开机操作 (6)3.1.2 关机操作 (6)3.2 界面导航 (6)3.2.1 主界面 (6)3.2.2 菜单栏 (6)3.2.3 设置菜单 (6)3.3 语音识别与交互 (6)3.3.1 语音唤醒 (6)3.3.2 语音识别 (7)3.3.3 交互体验 (7)第四章:学习资源管理 (7)4.1 资源导入与导出 (7)4.1.1 资源导入 (7)4.1.2 资源导出 (7)4.2 资源分类与检索 (7)4.2.1 资源分类 (7)4.2.2 资源检索 (8)4.3 资源更新与维护 (8)4.3.1 资源更新 (8)4.3.2 资源维护 (8)第五章:个性化学习设置 (8)5.1 用户注册与登录 (8)5.1.1 注册流程 (8)5.1.2 登录方式 (9)5.2 学习偏好设置 (9)5.2.1 学习目标设置 (9)5.2.2 学习兴趣设置 (9)5.3 学习进度管理 (9)5.3.1 学习进度查询 (9)5.3.2 学习计划调整 (9)5.3.3 学习提醒设置 (10)第六章:互动教学功能 (10)6.1 语音提问与回答 (10)6.1.1 功能概述 (10)6.1.2 操作步骤 (10)6.1.3 注意事项 (10)6.2 互动游戏与竞赛 (10)6.2.1 功能概述 (10)6.2.2 操作步骤 (10)6.2.3 注意事项 (10)6.3 作业布置与批改 (11)6.3.1 功能概述 (11)6.3.2 操作步骤 (11)6.3.3 注意事项 (11)第七章:家长管理与监控 (11)7.1 家长账号注册 (11)7.1.1 注册流程 (11)7.1.2 注意事项 (11)7.2 学习报告查看 (12)7.2.1 查看方式 (12)7.2.2 报告内容 (12)7.3 学习进度监控 (12)7.3.1 监控方式 (12)7.3.2 进度分析 (12)第八章:维护与故障排除 (13)8.1 硬件维护 (13)8.1.1 清洁 (13)8.1.2 检查连接线 (13)8.1.3 检查电池 (13)8.2 软件升级 (13)8.2.1 升级方法 (13)8.2.2 注意事项 (13)8.3 常见故障处理 (13)8.3.1 无法启动 (13)8.3.2 无法连接网络 (14)8.3.3 语音识别不准确 (14)8.3.4 无法充电 (14)8.3.5 系统崩溃 (14)第九章:安全与隐私 (14)9.1 数据加密 (14)9.1.1 加密技术概述 (14)9.1.2 数据加密流程 (14)9.1.3 加密密钥管理 (14)9.2 用户隐私保护 (15)9.2.1 隐私政策 (15)9.2.2 隐私保护措施 (15)9.2.3 用户隐私设置 (15)9.3 安全防护措施 (15)9.3.1 网络安全防护 (15)9.3.2 系统安全防护 (15)9.3.3 数据安全防护 (16)第十章:售后服务与支持 (16)10.1 技术支持 (16)10.1.1 技术支持范围 (16)10.1.2 技术支持途径 (16)10.2 配件更换 (16)10.2.1 配件更换范围 (16)10.2.2 配件更换流程 (17)10.3 售后服务政策 (17)10.3.1 质保期 (17)10.3.2 质保范围 (17)10.3.3 质保流程 (17)第一章:产品概述1.1 产品简介智能教育是一款集成了人工智能、语音识别、自然语言处理等前沿技术的教育辅助设备。
智能机器人技术操作指南

智能技术操作指南第1章智能概述 (4)1.1 发展简史 (4)1.1.1 传统工业 (4)1.1.2 传感器与结合 (4)1.1.3 智能 (4)1.2 智能技术特点 (4)1.2.1 自主性 (4)1.2.2 学习能力 (4)1.2.3 感知能力 (5)1.2.4 适应性 (5)1.2.5 交互性 (5)1.3 智能的应用领域 (5)1.3.1 工业生产 (5)1.3.2 医疗保健 (5)1.3.3 服务业 (5)1.3.4 灾难救援 (5)1.3.5 军事应用 (5)1.3.6 教育与科研 (5)第2章硬件系统 (5)2.1 结构设计 (5)2.1.1 结构设计原则 (5)2.1.2 结构组成 (5)2.1.3 结构材料 (6)2.2 驱动系统 (6)2.2.1 驱动方式 (6)2.2.2 电机选型 (6)2.2.3 驱动器配置 (6)2.3 传感器与执行器 (6)2.3.1 传感器 (6)2.3.2 执行器 (6)2.3.3 传感器与执行器的集成 (6)第3章控制系统与编程 (6)3.1 控制系统概述 (6)3.1.1 控制系统基本原理 (7)3.1.2 控制系统结构 (7)3.1.3 智能控制应用 (7)3.2 编程语言及环境 (7)3.2.1 编程语言 (7)3.2.2 编程环境 (7)3.3 编程实例 (8)3.3.1 任务描述 (8)3.3.2 编程实现 (8)3.3.3 代码示例(以Python语言为例) (8)第4章人工智能基础 (9)4.1 机器学习 (9)4.1.1 监督学习 (9)4.1.2 无监督学习 (9)4.1.3 强化学习 (9)4.2 深度学习 (9)4.2.1 神经网络 (9)4.2.2 卷积神经网络 (9)4.2.3 循环神经网络 (9)4.3 自然语言处理 (9)4.3.1 词向量 (10)4.3.2 语法分析 (10)4.3.3 机器翻译 (10)4.3.4 问答系统 (10)第5章机器视觉 (10)5.1 视觉传感器 (10)5.1.1 视觉传感器概述 (10)5.1.2 摄像头选型与安装 (10)5.1.3 图像传感器技术 (10)5.2 图像处理与识别 (10)5.2.1 图像预处理 (10)5.2.2 特征提取与匹配 (10)5.2.3 目标识别与分类 (11)5.3 视觉导航与定位 (11)5.3.1 视觉导航原理 (11)5.3.2 视觉定位技术 (11)5.3.3 视觉导航与定位在智能中的应用 (11)第6章语音交互 (11)6.1 语音识别技术 (11)6.1.1 基本原理 (11)6.1.2 关键技术 (11)6.1.3 技术发展 (11)6.2 语音合成技术 (12)6.2.1 基本原理 (12)6.2.2 关键技术 (12)6.2.3 技术发展 (12)6.3 语音交互应用场景 (12)6.3.1 客户服务 (12)6.3.2 智能家居 (12)6.3.3 辅助驾驶 (12)6.3.4 医疗健康 (12)6.3.5 教育培训 (12)第7章路径规划与导航 (12)7.1 路径规划算法 (12)7.1.1 图搜索算法 (12)7.1.2 A算法 (13)7.1.3 RRT算法 (13)7.2 导航策略与实现 (13)7.2.1 全局导航策略 (13)7.2.2 局部导航策略 (13)7.2.3 导航系统实现 (13)7.3 避障与碰撞检测 (13)7.3.1 避障策略 (13)7.3.2 碰撞检测方法 (14)7.3.3 避障与碰撞检测实现 (14)第8章运动控制 (14)8.1 运动学建模 (14)8.1.1 运动学模型概述 (14)8.1.2 笛卡尔坐标系与关节坐标系 (14)8.1.3 运动学建模方法 (14)8.2 动力学建模 (14)8.2.1 动力学模型概述 (14)8.2.2 拉格朗日方程 (15)8.2.3 动力学建模方法 (15)8.3 运动控制策略 (15)8.3.1 运动控制策略概述 (15)8.3.2 位置控制 (15)8.3.3 速度控制 (15)8.3.4 力矩控制 (15)8.3.5 运动轨迹规划 (15)8.3.6 运动控制算法实现 (15)第9章协作与群体行为 (15)9.1 协作概述 (15)9.1.1 基本概念 (15)9.1.2 关键技术 (16)9.1.3 研究现状 (16)9.2 群体行为控制 (16)9.2.1 通信机制 (16)9.2.2 协同控制策略 (16)9.3 协作应用案例 (17)9.3.1 工业生产领域 (17)9.3.2 医疗辅助领域 (17)9.3.3 服务行业 (17)9.3.4 灾难救援领域 (17)第10章安全与伦理 (17)10.1 安全规范 (17)10.1.1 基本安全要求 (17)10.1.2 安全标准与认证 (17)10.1.3 安全风险评估 (17)10.2 安全防护技术 (18)10.2.1 硬件安全防护 (18)10.2.2 软件安全防护 (18)10.2.3 网络安全防护 (18)10.3 伦理与法律规范 (18)10.3.1 伦理原则 (18)10.3.2 法律规范 (18)10.3.3 隐私保护 (18)10.3.4 人机协作与责任划分 (18)第1章智能概述1.1 发展简史自20世纪以来,技术的发展经历了多个阶段。
大学版智能机器人MT-URobot 使用说明书

8.3
MT-UROBOT 的无线控制计算机程序实现 .............................. 70
第 9 章 机器人的行为控制 ........................................73
2
大学版智能机器人用户使用手册
第 10 章 群体机器人 ..............................................74
无线通讯模块主控制盒前碰撞环盘球装置橡胶轮子后碰撞环主体扩展接口电路板灭火风扇组件扩展支架发光足球传感器支架大学版智能机器人用户使用手册12图22mturobot主板盒示意图图23mturobot控制按键及功能模块布置图液晶屏麦克风指示灯开关插座电源及下载口电机控制输出扬声器控制按键按键正上方视图右侧视图左侧视图前侧视图后侧视图大学版智能机器人用户使用手册13主板位于mturobot心脏部位的控制部件是mturobot的大脑主板它被安装在主板盒里面由很多电子元器件组成跟人的大脑一样主要完成接收信息处理信息发出指令等一系列过程
MT-UROBOT 的内部结构参见图 1-1 。MT-UROBOT 结构简图: 扩展支架
液晶显示屏 主控制器
传感器 扩展板
底盘 图 1-1 MT-UROBOT 结构简图
4
1.3 MT-UROBOT 的控制按键部分
大学版智能机器人用户使用手册
看见 MT-UROBOT 背后的控制按键部分了吗?其结构如图 1-2。在这个部分有 2 个小灯, 它们指示 MT-UROBOT 所处的状态。
第 5 章 机器人项目 ..............................................54
5.1
进门比赛 ....................................................... 54
Universal Robots UR3机器人产品说明书

vSOURCEShttps:///media/1528658/tuv-nord-certificate.pdf • https:///media/1528658/tuv-nord-certificate.pdf https:///about-universal-robots/news-centre/universal-robots-welcomes-the-new-technical-specification-on-collaborative-ro-bot-design/ • Positive Impact of Industrial Robots on Employment – International Federation of Robotics • A Future That Works: Automation, Employment AndProductivity – McKinsey Global Institute • The Impact of Robots on Productivity, Employment and Jobs – International Federation of RoboticsThe Talent Challenge: Harnessing The Power Of Human Skills In The Machine Age – PriceWaterhouseCoopers • https:///products/ur3-robot/ • https:///products/ur-robot-benefits/ • https:///case-stories/continental/ • https:///applications/ • https:///case-stories/bj-gear/ • https:///case-stories/multi-wing/5 Myths DebunkedCOBOTS:Cobots are not dangerous. They have built-in safety functions that permit them to work safely side-by-side with people. Cobots do not need to be caged upbehind protective fencing (subject to risk assessment).7FixedSafety FunctionsEmergency Stop Interface Safeguard Stop InterfaceSystem Emergency Stop OutputRobot Moving Digital OutputRobot Not Stopping Digital OutputReduced Mode Digital Output Not ReducedMode Digital OutputCobots are dangerous!Myth #1Myth #2Myth #3Myth #4Myth #52,000,000jobs globallyRobots will createup toFROM 2017 – 202050%productivitywithout job lossesWith cobots,plan onincreasing headcountdespite increase in automationof CEOs52%10%Onlyfully automatableof jobs areRobots create jobs — better jobs. They relieve workers from strenuous and repetitive tasks so that workers can take on new roles. Ultimately, human dexterity, critical thinking, decision making and creativity cannot be replaced by machines.Robots replace jobsCobots are easy to implement, operate and upkeep. Being compact and lightweight, there is no need to change production layout when switching the cobot between tasks. They are easily programmed or re-deployed, and require minimal maintenance.11KGCobot arms weigh as little asAverage Setup Time0.5DAYSTime to switch between tasks fell from 40 minutesto 20 minutes.A producer of car instrument panels, deployed UR10 cobots to handle PCBboards and components.AT CONTINENTAL AUTOMOTIVE IN SPAIN50%Changeover timeIt’s a hassle to implement and maintain robotsRegardless of the scale of output cobots can be deployed for simple processes that are repetitive, manual, or potentially strenuous for workers.Simpleautomated tasksPick- and-place Packaging & palletisingScrew- drivingGluing, dispensing & weldingRobotics automation is for complex,large-scale operations1YEARAverage payback period as short asup to20%production cost/unitA manufacturer of axial fan solutions, installed a UR5 robot toits production line reducingAT MULTI WING IN CZECH REPUBLICRobots are costly!Cobots are cost effective. Installation requires minimalinvestment as they do not require major infrastructural changes.They can be redeployed to different functions in the production line, and used around the clock.The safety system is certified by TÜV Nordto Performance level D, resulting inan extremely reliable system13849ISO8Adjustable Safety LimitsJoint TorqueLimitJoint PositionLimitJoint SpeedLimitTCP Speed LimitPower LimitTCP Force LimitTCP Pose LimitMomentumLimit15066ISOUniversal Robots’ cobots meet the guidelines set out in ISO/TS 15066 which help integrators assess risks and requirements duringinstallation。
机器人操作说明书

机器人操作说明书斯图加特航空自动化(青岛)有限公司中国-山东-青岛-高新技术开发区Tel:0532- Fax:0532-1.概要 (3)2.坐标系 (7)3.程序创建 (11)4.动作指令 (12)5.焊接指令 (16)6.摆动指令 (18)7.寻点指令 (20)斯图加特航空自动化(青岛)有限公司中国-山东-青岛-高新技术开发区Tel:0532- Fax:0532-概要•机器人•控制装置•示教器机器人机器人是由通过伺服电机驱动的轴和手腕构成的机构部件。
手腕叫做机臂,手腕的接合部叫做轴杆或者关节。
最初的3轴(J1.J2.J3)叫做基本轴。
机器人的基本构成,由该基本轴分别由几个直动轴和旋转轴构成而确定。
机械手腕轴对安装在法兰盘上的末端执行器(焊枪)进行操控。
如进行扭转、上下摆动、左右摆动之类的动作。
机械臂控制装置机器人控制装置,由电源装置、用户接口电路、动作控制电路、存储电路、I/O电路等构成。
用户在进行控制装置的操作时,使用示教操作盘和操作箱。
动作控制电路通过主cpu印刷电路板,对用来操作包含附加轴在内的机器人的所有轴之伺服放大器进行控制。
- 3 -示教操作盘- 5 -与菜单相关的键控开关与JOG 相关的键控开关与执行相关的键控开关与编辑相关的键控开关2.坐标系坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。
坐标系有关节坐标系、关节坐标系关节坐标系是设定在机器人的关节中的坐标系。
关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。
下图中的关节坐标系的关节值,处在所有轴都为0°的状态.关节坐标系刀具坐标系这是用来定义刀尖点(TCP)的位置和刀具姿势的坐标系.刀具坐标系必须事先进行设定.位定义时.将由机械接口坐标系代替刀具坐标系。
世界坐标系世界坐标系,是被固定在空间上的标准笛卡尔坐标系,其被固定在机器人事先确定的位置。
用户坐标系基于该坐标系而设定。
机器人用户使用说明书

惠州市东扬科技有限公司前言非常感谢选购东扬科技BioROBO系列娱教型机器人!首先,我们先对机器人做个简单的了解!Robot—机器人,该词来源于1920年捷克的一个反映科幻内容的话剧。
剧中的一个人物名叫robota(捷克文,意为苦力,奴隶),一个形状像人的机器,可以听从人的命令做各种工作。
英文robot是从robota衍生而来的。
我国将robot 翻译为机器人,给人一种错觉,机器人一定具有类人的外形。
其实,应该为具有人的某种的功能的机器。
机器人到目前为止共经历了三个发展阶段:第一阶段:机器人只能根据事先编好的程序来工作,这时它就好像只有干活的手儿,不懂如何去处理外界的信息。
比如,这一阶段的机器人,让它去抓会损坏它的东西,只要你给了指令,它绝对会去抓,这种称为示教再显型。
此类型的机器人非常合适机器人教育,他能真正的让使用者了解和学习机器人的运动、控制原理。
第二阶段:机器人好像有了感觉神经,具有了视觉、感觉、听力等功能,使得它可以依据外界的不同信息做出相应的反馈。
如果再让它去抓某些东西,它就有可能不干啦。
这种称之为感觉型。
第三阶段:机器人就真正的长大成人了,这时它不仅具有多种技能,能够感知外面的世界,而且它还能不断的自我学习,用自己的思维来决策自己该干什么,该怎么去干。
这种称为知慧型,目前各国的科学家都在为这一梦想的实现而努力。
BioROBO系列机器人是由惠州市东扬科技与上海交通大学合作研制的娱教型机器人,BioROBO适用于教育、竞赛、娱乐等多领域,是机体可重构“智能”模块化机器人。
BioROBO娱教机器人有四种控制模式:(1)遥控模式:通过2.4G无线遥控器直接控制的模式,组合操纵杆,按钮,可步行,胳膊动作,练武及日常的精彩动作及表情表演。
(2)特设动作模式:按遥控器上的相应A或B键或AB组合键,即可表演一段完美的风情舞,可做多种趣味性的表演!(3)同步控制:通过BioROBO Studio虚拟机器人同步调试机器人动作。
机器人助手-开始指南说明书

Cause and troubleshooting
Supply hose is kinked. ▶ Install the supply hose without kinks.
Water tap is turned off. ▶ Turn on the water tap.
Water tap is jammed or furred up. ▶ Turn on the water tap.
Setting the water softening sys-
H02
tem
H03
1. Press .
H04
2. To open the basic settings, press
H05
for 3 seconds.
H06
a The display shows Hxx.
H07
a The display shows .
Hardness mmol/l range
Setting value
Medium Medium Medium Hard Hard Hard
Soft
0 - 1.1
H00
Soft
1.2 - 1.4 H01
1.5 - 1.8 1.9 - 2.1 2.2 - 2.9 3.0 - 3.7 3.8 - 5.4 5.5 - 8.9
washers. Remove large remnants of food from 3. Switch on the appliance .
the tableware. Check that the spray arms can ro-
4. Select the programme. 5. Start the programme . 6. Remove the tableware at the end of the pro-
ROBOT 使用说明书
ROBOT 使用说明书1.SPARE管理:1).控制部—POWER UNIT/SERVO PACK/KEY-BOARD/MASTER BORAD**BORAD最好全部都有SPARE2).机械部—SSCREW/SERVO MOTOR2.运行部:控制部—PROGRAM/PARAMETER/ 等需BACK UP2.故障类型:3-1).干扰或电源短路SYSTEM DOWN** 一般初始化后SET-UP** 国内FRIT中央供给装置POWER部在CNC POWER部接线出来使用,所以出现3-1故障,现推进电源分离设置3-2).FRIT涂敷变化的现象发生** X.Y轴ZRN L/S长期使用时ON接点发生误差,一年更换一次3-3).SERVO PACK OC发生** SERVO MOTOR与滚轴连接的连轴器部轴承磨损过负荷**. SERVO MOTOR纵东侧部滚轴固定轴承磨损,过负荷** X.Y轴LM轴承不良发生,过负荷故障1.故障现象1-1).1998年7月16日4:20 #2 FRIT涂敷CNC M/C发生ALARM STOP,发生SYSTEM ALARM 910号内容:RAM PARITY ERROR(LOW BYTE)对策:更换MASTRE PRINT基板1-2).CNC DISPLAY表示状态只显示ALARM 910号和数据,操作键无法操作1-3).MASTER PCB的LED2号红灯亮2.故障原因2-1).认为是RAM侧的PARITY ERROR,是由周边的NOISE或MASTER BORAD缺陷而引起2-2).询问韩国CONTROL公司诊断结果认为是MASTER BORAD的问题,但准确原因不明,该公司PLC也偶尔发生PARITY ERROR 3.措施内容3-1).CNC MC SYSTEM初始化3-2).#1 CNC MC PARAMETER拷贝到#2 CNC MC3-3).15”左右侧PROGRAM 输入及TEACHING3-4).输入DIAGNOSTIC DATA4.措施详细内容4-1).检查CNC MC POWER部分,确认各BORAD侧插座接触状态4-2).参考说明书上进行措施,认为不可能在短时间内修复,所以向设备技术GR非常联络及确认MASTER BORAD SPARE4-3). SYSTEM初始化可以恢复RAM PARITY ERROR,但初始化时CNC MC的所有条件都被初始化,故保留意见4-4).与夏科长商谈后对系统进行初始化4-5).PARAMETER不能被登录,所以向韩国CONTROL金社长联络,用说明书上的内容无法登录,回应非常开关ON后进行输入4-6).拷贝#1 CNC MC PARAMETER进行输入,CNC MC SERVO MOTOR 可以运行,但运行中发生ALARMALARM-401发生(速度控制的READY信号(VRDY)OFF)ALARM-421发生(对于Y轴或Z轴移动中或停止时位置误差大)4-7).输入左右侧涂敷PROGRAM4-8).输入左右侧涂敷POINT坐标4-9).输入DIAGNOSTIC DATDATA输入DECLOADE无法输入4-10).设备保全,现场社员,极东业体一起进行左右侧涂敷精密SETTING沈代理、金代理分析3-6项目及分析PARAMTER研讨CNC MC的SERVO MOTOR移动时发生振动,不能精密设定4-11).SERVO MOTOR ALARM发生,修正相关PARAMTER参考NOTE PC的BACK-UP PARAMETER进行输入4-12).CNC MC SERVO SYSTEM故障修复完了后设定涂敷PROGRAM 设备保全,现场社员,极东业体17:00 涂敷PROGRAM基本已SETTING所以委托现场SETTING 4-13).现场清扫及CNC MC左右侧涂敷精密SETTING5.再发生对策5-1).#2 LINE用FRIT涂敷机CNC MC发生SYSTEM障碍的现象,所以委托专门业体专门诊断5-2).电器部SYSTEM DATA BACK-UP管理DNC PROGRAM活用X-Y TABLE DATA BACK-UP管理1.管理POINT1-1).因SYSTEM有异,初始化前CHECK事项因SYSTEM有异需初始化情况时,先确认MASTER BOARD的LADDER PROGRAM用MEMORY装置是否以ROM构成RAM构成的设备不能进行初始化(LADDER PROGRAM在USEE上不能读写只作专用设备)1-2).初始化方法POWER OFF后RESET KEY和DEL KEY同时按下的状态下POWER ON则SYSTEM初始化(RAM OR EPROM部全部被初始化)2.基本条件2-1).SYSTEM中PARAMETER不能被输入的情况在紧急停止开关被按下状态下输入则任何情况下参数都可以输入2-2).利用NOTE PC的DNC PROGRAM LOAD或SAVE时基本条件CNC MC的PARAMTER中ISO设为1的状态(设定为外部机器可以连接)PARAMETER 900号的基本条件是已输入的状态EX)900 0010001090101000100902100000009050010000090701010000909010000002-3).手动修正PARAMETER时PARAMETER的PWE设定为1才能输入PARAMETER的PWE设定为1则在CNC MC的DISPLAY上会发生100PS ALARM,但因允许输入参数而系统被设定为运行禁止,所以在必要的部分修正参数即可。
01 机器人示教盒按键及画面说明
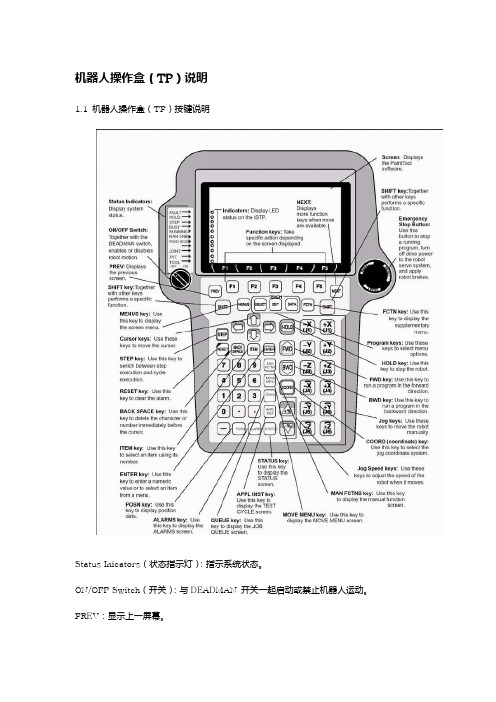
机器人操作盒(TP)说明1.1 机器人操作盒(TP)按键说明Status Inicators(状态指示灯):指示系统状态。
ON/OFF Switch(开关):与DEADMAN 开关一起启动或禁止机器人运动。
PREV:显示上一屏幕。
SHIFT key(键):与其它键一起执行特定功能。
MENUS key(键):使用该键显示屏幕菜单。
Cursor keys(光标键):使用这些键移动光标。
STEP key(键):使用这个键在单步执行和循环执行之间切换。
RESET key(键):使用这个键清除告警。
BACK SPACE key(键)::使用这个键清楚光标之前的字符或者数字。
ITEM key(键):使用这个键选择它所代表的项。
ENTER key(键):使用该键输入数值或从菜单选择某个项。
POSN key(键):使用该键显示位置数据。
ALARMS key(键):使用该键显示告警屏幕。
QUEUE key(键):使用该键显示任务队列屏幕。
APPL INST key(键):使用该键显示测试循环屏幕。
SATUS key(键):使用该键显示状态屏幕。
MOVE MENU key(键):使用该键来显示运动菜单屏幕。
MAN FCTNS key(键):使用该键来显示手动功能屏幕。
Jog Speed keys(键):使用这些键来调节机器人的手动操作速度。
COORD key(坐标系键):使用该键来选择手动操作坐标系。
Jog keys(键):使用这些键来手动手动操作机器人。
BWD key(键):使用该键从后向前地运行程序。
FWD key(键):使用该键从前至后地运行程序。
HOLD key(键):使用该键停止机器人。
Program keys(程序键):使用这些键选择菜单项。
FCTN key(键):使用该键显示附加菜单。
Emergency Stop Button(紧急停止按钮):使用该键停止正在运行的程序,关闭机器人伺服系统的驱动电源,并对机器人实施制动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
大学版智能机器人用户使用手册
目錄
第 1 章 让你的智能机器人动起来 ...................................4
1.1
欢迎进入 MT-UROBOT 的世界 ........................................ 4
烁,这样就表明下载正常,程序正在进入机器人的“大脑”即 CPU。
“充电口” 将充电器的相应端插入此口,再将另一端插到电源上即可对机器人充电。具体使用方
法见“1.4 MT-UROBOT 的充电”。
“下载口” “充电口”旁边的“下载口”用于下载程序到机器人主板上,使用时只需将串口连接线的相
应端插入下载口,另一端与计算机连接好,这样机器人与计算机就连接起来了。具体使用方 法见“1.6”。
第 3 章 感觉、大脑与驱动器 ......................................22
3.1
智能机器人的三大要素 ........................................... 22
3.2
大学版机器人的传感器及其处理电路 ............................... 23
1.5
MT-UROBOT 的连接和检测........................................... 7
第 2 章 MT-UROBOT 的系统结构.....................................11
2.1
概述 ........................................................... 11
1.4 MT-UROBOT 的充电
MT-UROBOT 可以在线充电:也就是不用取出电池,直接为机器人充电。
图 1-3 充电器充电示意图
1.4.1 开机充电
MT-UROBOT 可以一边充电一边活动,这样很方便,不会影响你对机器人进行编程和 调试。您要采用这种方式给 MT-UROBOT 充电时,只需:
1. 将充电器取出; 2. 把充电器充电线插入控制按键中的充电插口; 3. 另一端充电器电源插头插入标准电源插座上(100~220V,50Hz); 4. 初始充电,充电器指示灯显示红色,电池充满电之后为绿色。
“复位/Reset”按钮 这是个复位按钮,用于硬件系统复位。
5
大学版智能机器人用户使用手册
“下载”键 这是个下载按钮,用于将用户在大学版机器人 MT-U 专用软件集成开发环境中编写的程
序下载至机器人。
“运行”键 选择“RUN”后,按击“运行”键,机器人就可以运行内部已存储的程序,按照你的“指令”
行动。
1.2
MT-UROBOT 的内部结构............................................. 4
1.3
MT-UROBOT 的控制按键部分......................................... 5
1.4
MT-UROBOT 的充电................................................. 6
3
大学版智能机器人用户使用手册
第1章 让你的智能机器人动起来
1.1 欢迎进入 MT-UROBOT 的世界
MT-UROBOT 是大学版机器人,它是专门为大学进行课程教学、工程训练、科技创新以及 研究服务的新型移动智能机器人。
MT-UROBOT 有一个功能很强的“大脑”和一组灵敏的“感觉”器官,它不仅可以随着外 部环境敏捷的作出反应,而且还可以与你进行交流;它有听觉、视觉、和触觉,它还会象“人” 一样使用动作和声音来表达与它周围世界互动时的感觉:
MT-UROBOT 的内部结构参见图 1-1 。MT-UROBOT 结构简图: 扩展支架
液晶显示屏 主控制器
传感器 扩展板
底盘 图 1-1 MT-UROBOT 结构简图
4
1.3 MT-UROBOT 的控制按键部分
大学版智能机器人用户使用手册
看见 MT-UROBOT 背后的控制按键部分了吗?其结构如图 1-2。在这个部分有 2 个小灯, 它们指示 MT-UROBOT 所处的状态。
1.4.2 关机充电
MT-UROBOT 也可以关机充电。只需将机器人的电源关闭,拨动电源控制的“开关”键, “电源”指示灯灭就表示电源已经关闭。这时再用以上三个步骤给机器人充电。充电 3.5 小时 即可充满。
1.4.3 更换电池
电池充满电压 16.8V,额定工作电压 14.8V,最低工作电压 12.8V。电池可重复充电 1000
2.2
MT-UROBOT 系统构成.............................................. 11
2.3
MT-UROBOT 的传动机构............................................ 18
2.4
MT-UROBOT 的动力与驱动.......................................... 19
第 8 章 MT-UROBOT 的无线控制实现.................................67
8.1
机器人平台 ..................................................... 67
8.2
计算机与 MT-UROBOT 的无线通信 ................................... 67
图 1-2 控制按键部分 开关按钮
控制 MT-UROBOT 电源开关的按钮,按此按钮可以打开或关闭机器人电源。
“电池欠压检测”指示灯 按下 MT-UROBOT 的开关后,这个灯会不发光,当电池容量不够时,会发出红光,这
时必须给电池充电,才能使用。
“通信”指示灯 “通信”指示灯位于机器人主板的前方,在给 MT-UROBOT 下载程序时,这个绿灯会闪
3.3
大学版智能机器人的计算机硬件 ................................... 33
3.4
驱动器 ......................................................... 38
3.5
LCD 显示板 ..................................................... 41
突出的扩展性能、高速的处理系统、以及由浅入深的流程图、C 语言、汇编语言编程环 境是我们大学版智能机器人的重要特色,在下面以及后面的章节中,我将带领大家了解他、 感知他,重要的是,在这过程中,我们体验是机器人世界的神奇功能,以及在此基础上,发 掘我们自身对于知识、能力、未来发展的直接体验和构想。
1.2 MT-UROBOT 的内部结构
3.6
硬件扩展板 ..................................................... 42
3.7
硬件扩展总线 MTBUS.............................................. 43
第 4 章 编程—赋予大学版机器人智慧..................................45
7.1
控制方法介绍 ................................................... 63
7.2
PID 算法的数字化实现............................................ 64
7.3
MT-UROBOT 的 PID 算法的程序设计 .................................. 65
第 6 章 基于视频技术的野外探险机器人 ............................60
6.1
MT-Wireless 无线摄像机.......................................... 60
6.2
视频捕捉卡 ..................................................... 61
第 5 章 机器人项目 ..............................................54
5.1
进门比赛 ....................................................... 54
5.2
群鸭过河 ....................................................... 5.................................... 62
6.4
野外探险机器人的程序实现 ....................................... 62
第 7 章 数字 PID 及其算法 ........................................63
6
大学版智能机器人用户使用手册
次以上。因为 MT-UROBOT 里用的是聚合物锂电池,没有记忆和充爆问题,所以你可以随 时充电随时用。
当电池达到使用寿命后,需要更换电池,我们按下面步骤进行: 1. 关闭 MT-UROBOT 的电源; 2. 将电池取出,更换电池; 3. 重新装上新电池。
1.4.4 扩展电源
第 11 章 附录 ....................................................80
附录 1: 大学版机器人 MT-U C 语言 Ver1.0 库函数 ............................ 80 附录 2: 产品的主要技术性能和参数 ........................................ 82 附录 3: 产品的使用条件和使用环境要求 .................................... 82 附录 4: 常见故障及维修方法 .............................................. 83 附录 5 主板和扩展板结构图 .............................................. 84