2250kN海洋修井机气控系统设计_何军国
石油钻井和修井井架设计的安全性评估

石油钻井和修井井架设计的安全性评估任化斌;何军国;周莉莉【摘要】石油钻井和修井井架属野外作业设备,工况多,受力复杂,是钻机和修井机的核心结构.井架在服役过程中,易出现杆件变形、焊缝开裂、总体弯曲、共振等现象.为避免井架在吊装、运输、作业、设备保全等全工况条件下出现故障,确保使用安全,应用系统分析方法及工程实践应用经验,得出其在不同工况下需要做的受力分析,建立起基于“全工况、多要素”的安全评估方法,为井架设计提供保障,也为钻机和修井机底座设计提供借鉴.【期刊名称】《河南科技》【年(卷),期】2017(000)003【总页数】3页(P57-59)【关键词】井架设计;全工况;安全评估【作者】任化斌;何军国;周莉莉【作者单位】南阳二机石油装备集团股份有限公司,河南南阳473006;南阳二机石油装备集团股份有限公司,河南南阳473006;南阳二机石油装备集团股份有限公司,河南南阳473006【正文语种】中文【中图分类】TE951井架是钻机和修井机的重要组成部分。
目前在用典型井架结构,包括桅形井架、K 形套装井架、多节自升式井架、旋升式K形井架(也称前开口井架)、塔型井架及海洋动态井架。
一种新型井架的诞生,往往带来一种新型钻机或修井机的出现[1],大庆130老式钻机的代表是标准塔式井架;三节以下套装式、直立、轻型K形井架则成为模块化轻型钻机的标志;而旋升式K形井架则是大型橇装钻机的首选;多节自升式井架主要配套于紧凑型大型海洋钻机;双井架用于深海作业。
井架的作用主要是用于安放或悬挂天车、游车、大钩或顶部驱动装置等起升设备,用于悬挂泥浆立管、水龙头、水龙带等泥浆循环设备,承受起下钻、下套管、打捞、测试及其他作业所产生的载荷,提供起下钻、存放管柱的高度与空间[2]。
井架由于其在钻井或修井作业中所起的作用、结构型式及所处工作环境,承受较为复杂的、恶劣的受力。
井架在井场转运时摔落、起升时变形、解卡时折弯、迎风时扭曲等现象时有发生,如何保证井架的强度、刚度及稳定性,也就是如何保持井架设计安全性,不仅成为设计师重点考虑的问题,也成为第三方设计审核的重点。
海洋修井机火气系统

F &G S由P L C和各种检测器等设备的硬件和应用软 件及逻辑组态文件 的软件组成 。S I L ( S I L 为美 国 I S A一
¥ 8 4 . 0 1 标准要 求的安全等级) 是指在一定时间 、一定条
件下 , 安 全系 统能够 执 行所 规定 的安全 功 能的概率 , 即 在要求安 全 系统 动作 时其功 能失效概率 的倒数 l 。S I L
( 中海油 能源 发展油 田建设 工程 分公 司 , 天津 3 0 0 4 5 2 )
摘 要 : 在海 上石 油及天然气开 采过 艉中 , 海洋下台作为油气采集 、临_ 日 j ’ ‘ 存 储及简单处 的重要场所 ,
险区电气 没施进行实时监控 及报警 , 对于第一 时问扑灭火灾防 Ⅱ 二 灾难发生 有着重要 的意 义。夺 器件选 型 、信号传输 络等几个方面 埘海 洋修井机火 气系统的设 计进行 丁探讨 。 关键 词 : 火气系统 : 海洋修井机 ; 火气盘 ; P I C; E S D
Ke y、 v o r d s : F & GS : WO ' 1 ‘ k o v e t r i 望 : F &G p l a t e ; P LC: E SD
1 引 言
火 灾 消 防 、 可 燃 气 体 及 有 毒 气 体 监 测保 护 系 统
( F &Gs ) 作 为装置控制系统 中一个 重要的子系统 , 主 要用
代表着安 全系统 使过程 风险降低 的数量 级 。表 1是 SI L
安全 功能 的概 率 。
表1 S I L安全功 能的概率
危 险环境 的可燃气体 、有毒气体及 火灾的监 测 、报警 甚 至 必要时 的消防联 动功能… 1 。国家对海 上石油 和天然 气 资 源 的开 发力 度的加 大 , 越来越 多 的钻 修设 备在 海洋平 台投入使 用 , 石 油和天 然气的大 量开 采对我 国的 国 民经 济 发展 起 着至 关重 要 的作 用 , 随着 国 家和企 业 的 发展 , 关 心和保 护企业 员工 的安全 已被放在 第一 位 , 这 也是 与
XJ-250型修井机技术改造方案设计及应用
XJ-250型修井机技术改造方案设计及应用【摘要】由于青海油田修井机通过十几年的现场使用,设备自然磨损,发动机功率等各方面性能下降,并多次三保,修理效果不理想,现通过方案分析分析和具体技术改造,挖掘现有设备的潜力,使修井各项性能达到使用要求,提高了设备作业效率和经济效益。
【关键词】修井机改造柴油机性能分析1 前言油田所用XJ-250型修井机是江汉石油第四机械厂生产的单滚筒自走式修井机,型号为:SJX2580TXJ250,它主要由自走式底盘(三个驱动桥)角传动箱、滚筒及其刹车系统、刹车冷却装置、Π型两节伸缩式井架及3×4游动系统、死绳固定器及压力传感指重装置、液压绞车、钻台、水轮头、气动卡瓦及司钻控制的气路和液压系统、转盘传动装置、电路系统组成。
XJ-250型修井机底盘为6×6驱动的自走车,大梁使用16mm钢板焊接而成的特别加强梁,发动机为美国卡特彼勒CAT3306柴油机,功率201kW(2200r/ min);配置艾利逊CLBT-754型带分动箱的传动箱,变矩器TC-580,可将动力分别传递给底盘的前驱动桥,后驱动桥或台上的绞车系统。
传动箱上的取力口接驱动箱连接主油泵P25×378BEIU25-7,可提供给液压系统。
目前,该类修井机通过十几年的现场使用,设备自然磨损,发动机多次三保,维修成本大幅提升,发动机功率等各方面性能下降,修理效果不理想,无法满足工作需求,暴露了一些不适应目前现场作业的工艺要求和HSE 要求。
由于该设备以台上作业为主,底盘性能相对较好。
在资金紧张的情况下,如果从设备改造上下功夫,挖掘现有设备的潜力,可以节省设备购置资金,同时还可以缓解大修设备缺少的压力。
青海油田现有这类修井机15台套,因此,对修井机进行技术改造具有十分重要的意义。
2 技术改造方案2.1 技术改造原则修井机作业性能达到或超过XJ-250型修井机基本规范的要求;修井机行驶性能符合专用汽车有关标准的规定;结构简洁、操作方便、安全可靠;尽可能对原车有修复价值的零部件降低改造费用。
我国海洋修井机的技术现状与发展对策
石
油
机
械
20 0 2年
茅3 O卷
增 刊
CHI ET NA P ROL EU M ACHI M NERY
.专置 综 述 - 一 .
我 国海 洋修 井机 的技 术 现 状 与发 展 对 策
张 勇’ 何 军 国
( 南石 油勘 探 局 南 阳石 油机 械 厂 ) 河
4. m s 0 期 重 现 5 .m s 0 5 3 / ,1 a 2 5 / ,5 a期 重 现 达 6. m s 0 i 1 1 / 。1 r n平均 风速 ,1 期 重现 3 a a s阵风风 速 3 .m s 0 2 3 / ,1 a期 重 现 3 . m s 5 a期 重 现 达 75 /, 0 4 .m s 3 6 / 。因而 海洋修 井机 无 论 从部 件 还 是 整 机 的 设计都 需具 备非 常高 的抗 风能力 。海洋修 井 机的产 生带 动 了 国 内直 立 无 绷 绳 桅 形 井 架 … ( 称之 为 现 K形 井 架 ,有 别 于传 统 的塔 形 、A形 、前 开 口形 、 桅形 井 架 ) 的首 次 出现 ,它 比陆 地 常规 井架 具有
配 用独特 的移动底座 。 2 .高 抗 风 性
门等多种结构 。已投人使用或正在设计生产 的海洋修
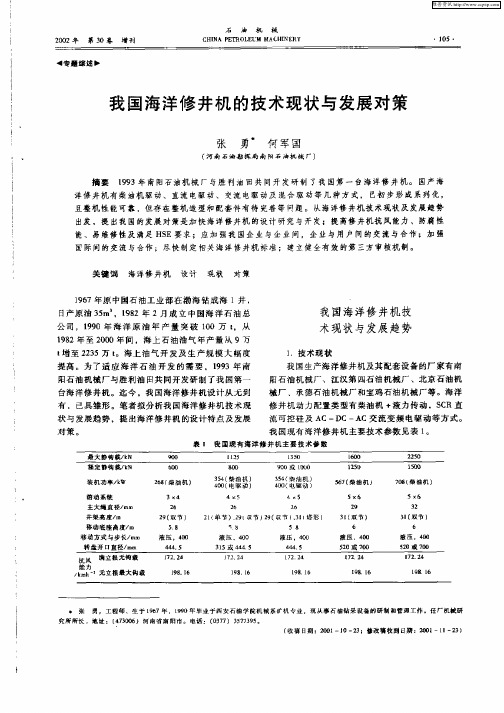
井 机2 5台,其中胜利油 田5台,辽河油 田 1台,渤海 石油公 司 l 7台 ,南海西 部 石油公 司 2台。从 海洋修 井机在各油 田使用情况来看 ,具有如下特点: ( )我 国石 油 钻 采 设 备 翩 造 厂 家 具 有 丰 富 的 1 陆上钻 修设 备设 计制造 经验 ,加 上近年来 对海 洋修 井机 的初步 摸索 ,已具 备实现 海 洋修井 机国产 化的 基本 能力 ; ( ) 目前海 洋 修 井 机整 体 性 能 可 靠 ,品种 较 2 齐全 ,已初步 实 现系列 化 ;
多功能平台海洋修井机模块研制

2018年第46卷第3期石油机械CHINA PETROLEUM MACHINERY—35 —◄海洋石油装备黪多功能平台海洋修井机模块研制冯克仝兆盘洪鹤云张小欣怡强周莉莉(南阳二机石油装备集团股份有限公司)摘要:针对胜利油田多功能平台面积小、丼口组多、平台承载能力小和安全要求高等特点,研制了多功能平台海洋修井机模块。
该模块主要由井架、底座、绞车、转盘、动力系统、控制系 统和滑移系统等组成。
修井机模块结构紧凑,整机安装在甲板导轨上,可沿导轨纵向和横向滑移,底座设有多个梯子和坡道安装位置,满足多井口组的修井作业;绞车采用气动钳盘式辅助刹车,质量轻;采用电喷防爆柴油机驱动,提高了修丼作业的安全性。
由有限元分析计算可知,修丼机 的强度、刚度和稳定性等均满足相关规范要求。
该海洋修井机模块分别在不同平台上使用,完成 现场上百口井的修井作业,使用效果良好。
修井机布局合理,结构紧凑,安装及拆卸筒单,便于 海上吊装及运输。
所得结论可为修井机模块的进一步优化和老平台改造提供参考。
关键词:多功能平台;海洋修井机;防爆柴油机;轻便型绞车;多点控制系统中图分类号:TE952 文献标识码:A doi:10. 16082/ki.issn. 1001-4578.2018.03.007 Development of Offshore Workover Rig Module for Multi-functional PlatformFeng Ke Tong Zhaopan Hong Heyun Zhang Xiaoxin Yi Qiang Zhou Lili(RG Petro-Machinery(Group) Co., Ltd.)Abstract :Aiming at the characteristics of the multi-functional platform in Shengli Oil Field,such as small area,multiple wellhead groups,small carrying capacity and high safety requirements,an offshore workover rig module for the platform is developed.The module is mainly composed of derrick,substructure,drawworks,rotary table,power system,control system and slide system.The workover rig module,with compact structure,is installed on the deck guide rail,along which it is allowed to move longitudinally and laterally.The substructure has a number of ladder and ramp installation position for multi-well group workover operations.The drawworks is provided with pneumatic clamp disc brake with light weight.Electrospray ex-proof diesel engine drive is adopted to improve workover operation safety.Finite element analysis shows that the workover rig strength,stiffness and stability meet the relevant specifications.The developed offshore workover rig module has been used on different platforms to complete the workover operations in hundreds of wells with great application results.The workover rig could gready reduce the cost of workover operation with its reasonable layout,compact structure,easy installation and disassem-bly,and convenient offshore lifting and transportation.Keywords :multi-function platform;offshore workover rig;explosion-proof diesel engine;portable drawworks;multi-point control system住等多种功能有机结合在一起的综合性平台[1],〇引言因其具有良好的使用性能,所以其产量逐年增加[2]。
海洋电驱动修井机液控系统优化设计研究
设计与研究71海洋电驱动修井机液控系统优化设计研究娄云鹏张硌(沈阳新松机器人自动化股份有限公司,沈阳100186)摘要:本文就海洋电驱动修井机液控系统优化设计研究作简要阐述。
关键词:修井机液控系统自动化电驱动海洋中蕴含着大量资源,而资源对社会经济发展意义 重大。
与传统陆地资源开发工作相比,海洋资源开发面临 的环境更加复杂,风险也更高,投入成本也更大,技术复 杂性也更强。
在工业自动化与信息技术快速发展的同时,有必要对己有的设施进行升级,以更好地适应当下环境下 的资源开发作业。
1系统存在的问题修井机控制系统由两部分组成一一分机控制系统和盘 刹控制系统。
系统的不足之处在于,只能在本地实施控制,而不能进行远程控制。
本地控制的对象包括了箱启、停液 压站。
远程控制对象则包括了远程启、停控制。
远程控制方面,修井机液压猫头、绞车在司钻控制房,采用气控液的形式。
在操作过程中,它的延时问题非常严 重,而且也不便于操作。
从设计工作方面来看,这与以人 为本的设计理念不符。
在日常工作中,它的使用通常能够 满足作业需要。
但在紧急情况下,它则无法达到预期的理 想效果。
设备在设计方面存在的缺陷导致作业过程中存在安全 隐患。
设备虽然在液压站配置了报警系统,包括高低液位、温控自动化。
在信息传输方面,系统无法将油位与油温信 号反馈。
司控钻房得不到有效反馈,将无法对设备当前的 状态进行准确判断。
在作业过程中,如果报警系统出现问 题,司钻就无法在最快时间内得到油温与油位报警的信号,从而引发严重的事故。
除此之外,系统需要采集的信号还 有绞车盘刹控制手柄零位信号。
通常情况下,对绞车控制 采用触摸屏的方式。
在盘刹手柄突然性动作发生时,工作 钳比例控制阀也会相应产生动作,绞车刹车,此时存在转 速不为零的情况。
如果此时绞车的主电机仍然在工作且处 于高速运转,电机很容易被损坏[1]。
2系统的优化设计2.1远程自动化启、停控制液压站远程自动化控制的要求是在司房内即可实现对 相关设备的控制,如机具电机、循环油泵、盘刹电机以及 加热器停止、启动等。
海洋石油修井机优化设计探讨论文(最终5篇)
海洋石油修井机优化设计探讨论文(最终5篇)第一篇:海洋石油修井机优化设计探讨论文1石油修井机液控系统存在的主要问题1.1安全隐患严重液压站当中所配备的高低液位报警系统、油温自控系统无法使油温、油位等信息被及时的报告给司钻控制房,在修井作业之时,若本地报警系统出现了故障问题,司钻将难以及时获取到油温与油位的警报信息,由此便极有可能会造成严重的安全隐患。
电驱动修井机绞车盘刹控制手柄零位信号无法为自动化控制系统所及时获取,一般状况下大都是采取触摸屏来实现对于绞车的控制,盘刹手柄在突然启动之时,工作钳比例可实现对阀门的控制,若此时转速不为零则绞车将会做出刹车动作,在这一情况下若绞车主电机依旧处于高速旋转状态,便极易大致电机受损。
1.2缺乏人性化采用电力驱动的修井机液控系统具体可被分成机具控制系统与盘刹控制系统两类,且仅能够在本地控制箱当中来实现对液压站的开启或暂停,无法促使司钻控制房实现远程开启或暂停。
电驱动修井机液压绞车与猫头在司钻空置房当中所采取的远程控制方式为气控液方式,在操作之时有着十分明显的延时性现象,操作起来极为不便,在紧急作业时这一缺陷将更加明显。
2系统优化设计2.1液压站远程自动化控制液压远程控制需要可以在司钻房当中实现对以下几项设备的开启与暂停控制,其具体包括有:冷却风机、盘刹电机、加热器、循环油泵、机具泵电机等。
综合考虑修井机电控系统触摸屏与自动化控制系统,在触摸屏当中组态设置出距离切换,对于盘刹电机、加热器、冷却风机、循环油泵等采取开启与暂停软输入控制,利用自动化控制系统以及PROFIBUS总线技术来实现互相通讯,依据司钻处于触摸屏的操作执行状态下来进行有关的输出控制,达成对于电机在远距离条件下的开启与暂停控制。
2.2高效率优化设计2.2.1液压绞车控制采用电控液来取代传统的液压绞车气控液,可在司钻控制房当中远程实现对液压绞车的精确化控制。
通过司钻控制房所供应的电力来源,整个石油修井机的控制系统是通过液压绞车电控液控制手柄、电磁比例换向阀、数字放大器等所共同构成。
22565725_液压举升修井技术研究及在渤海油田的首次应用

液压举升修井技术研究及在渤海油田的首次应用!韩树杰%王!超%高永华$黄志力%刘东旭%丁鹏飞%!%K中海油能源发展股份有限公司工程技术分公司"天津M ""'*$%$K 中海油有限公司天津分公司工程技术作业中心"天津M ""'*!#摘要!为解决国内海上无修井机平台躺井时间长及双井区平台修井工作量大的难题"研究了海上平台液压举升装置修井技术$以渤海油田某双井区平台为目标"从提升能力&作业通径&安装方式等方面对液压举升装置进行了选型分析"并在渤海进行了首次应用$首次两口井的应用表明"液压举升装置作业流程与常规修井流程基本相同"除井间转换安装拆除时间外"作业时效与常规修井机相当"为海上修井作业提供了一种新的技术手段$关键词!液压举升装置%修井%检泵%无修井机平台%渤海油田$中图分类号 &!*文献标志码 (文章编号 $")*+!$)!!$"$"#"'+"$*%+"N!"# %",%$"#!'-../,$")*+!$)!,$"$","',")H %+%('45"&S 0!'()#4T "'U I "I %'V !ST V #C %45&")",0(&!W 1+L #'+1766)#4(1#"&#&M "5(#3#)-#%)!W 23`75+j 1.%":239O 72-%"R 2-Y -39+752$"W 5239671+@1%"X 15L -39+E 5%"L 139&.39+;.1%!%<3O E E 3G %&#)D A &,-%1:1)D '#$::$%)*F #1;0,/$1%?#"%,-A $"%S$%M ""'*$"3-$%"%$<3O E E 36/;<A $"%S $%?#"%,-E 8&#"/$1%3&%/&#"A $"%S$%M ""'*!"3-$%"#78+1'(41!0-?.A -@D .B ?-K @.C A-;@-39/1C .A /23>K G e .@@A-3-;;A 7-?.B @2/;-?C A e 1/7-5/e -?_-D .??1923>-3B @2/;-?C Ae 1/77.2D G e -?_-D .?e -?_@-2>A23>-3@G -3.?19-31/"/7.7G >?25@1=e -?_-D .?531/!W:U #/.=73-@-9G 72D .K ..3A G A /.C 2/1=2@@G A /5>1.>F<3.B @2/;-?C e 1/7>-5K @.e .@@2?.21A=7-A .313d -721<1@;1.@>F07./G B .A-;W:U2?.232@G H .>>.B .3>139-3B 5@@=2B 2=1/G "/7?-597K -?.23>13A /2@@2/1-3-B /1-3A "23>1/e 2A K ..32B B @1.>13d -721`.2;-?/7.;1?A //1C .F 07.;1?A /e -?_-D .?2B B @1=2/1-3-;/e -e .@@Ae 1/7W:UA 7-e A "e -?_;@-e1A 2@C -A //7.A 2C .K ./e ..3W:U 23>=-3D .3/1-32@e -?_-D .??19A F07.e -?_-D .?B .?;-?C 23=.-;W:U 1A.I 52@/-=-3D .3/1-32@e -?_-D .??19".E =.B //7..E /?2/1C .=-3A 5C .>K G W:U13A /2@@2/1-323>>.C -@1/1-3/-=7239139B -A 1/1-3-3>1;;.?.3/e .@@A F 07.W:U/.=73-@-9GB ?-D 1>.A 23.e/.=731=2@C ./7->;-?-;;A 7-?.e -?_-D .?-B.?2/1-3F 9%0:"'!+!7G >?25@1=e -?_-D .?531/%e -?_-D .?%P `&?.B @2=.C .3/%B @2/;-?C e 1/7-5/e -?_-D .??19%d -721-1@;1.@>;!引!言随着海上油田勘探开发力度加大及增储上产需求的日益迫切"缩短现有海上油气井的躺井时间&实现快速扶井成为重要的研究课题$无修井机生产平台的修井作业"多采用批量修井方式"以分摊自升式钻井平台的动复员费用"降低单井作业成本$因此会造成部分井的躺井时间延长"影响油田产量$另外"部分双井区平台由于井数多"钻修机无法满足平台安装的模块的作业量需求"无法实现油井即躺即扶的效果$为解决上述难题"笔者及其团队通过研究液压举升装置修井技术"从规范符合性&设备选型&安装工艺&结构强度校核等方面进行分析"在渤海油田利用小型液压举升装置首次完成了两口注水井修井作!!基金项目 中海油能源发展股份有限公司科技攻关重大专项子课题*无钻机弃置技术研究+!W c 64b 0+R 8$"%)"M#作者简介 韩树杰!%)#',!#"男"本科"工程师"主要从事多功能平台及液压举升装置技术研究及作业$通讯作者 王!超!%)#$,!#"男"本科"高级工程师"主要从事海上油气井弃置技术研究及推广工作$第!卷!第'期!$"$"年#月海洋工程装备与技术<O P (QP Q R J Q P P S J Q RP T U J &V P Q 0(Q L0P O WQ <X <R YZ -@F !"Q -F '(59F "$"$"第!卷海洋工程装备与技术-$*$!-!业"并完成了#口井作业"恢复了注水井功能及油井产能$液压举升修井技术具有动用资源少&扶井时效快等优点"能够弥补钻井平台修井费用高和扶井时效慢的缺点"为海上油田的增产稳产提供了新的技术手段"正成为国内技术研究及市场推广的重点(%%%)$<!液压举升装置修井技术%F %!液压举升修井技术的发展%)N "年"第一台液压举升装置在北美诞生"用来进行带压作业"此后逐渐应用到起下电泵&打捞&套铣封隔器等修井作业中$经过M "多年的发展"液压举升装置已经成为国外陆地油田广泛使用的一种作业方式$除上述作业类型外"已经在向侧钻&锻铣套管&钻水泥塞&弃井作业拓展$在海上"由于使用环境&平台载荷等各方面的限制"目前仅在北海及美国墨西哥湾较大的海洋平台&东南亚无风带区域有广泛的应用$在国内"液压举升装置主要用来进行水井和气井的带压作业"有多家油田服务公司提供陆地带压作业服务"但海上的应用案例仍然很少$目前"主流市场的液压举升装置根据举升力大小主要分为*类"如表%所示$表<!液压举升装置主流机型及主要参数序号主要参数'型号%*"b $$*b M '"b 'N "bN ""b %举升力'/N #%"$%*'$"#$!$$下推力'/M **'!!%"'%M N M 旋转扭矩'_Q -C ##M "M "M "'油缸行程'C M F M M F M M F M M F M M F M *通径尺寸'CC %!)$#"M 'N M 'N M 'N N 工作窗口高度'C %F # M F "%F # M F "%F # M F !%F # M F !%F #M F !!适用管径'CC%) M %%%) %'"N " %)'N " $!M N "$!M%F $!液压举升装置工作原理液压举升装置是利用'个液压缸推动游动卡瓦上下往复运动实现管柱的起下的$工作原理如下.整套装置安装在井口或底座上"使用游动卡瓦与固定卡瓦相互配合"交替卡紧管柱后通过油缸的运动来进行管柱的上提或下放$当需进行起升管柱作业时"先通过平衡绞车下提升油管"再通过油管钳将提升油管与油管挂连接$操作主控台控制游动卡瓦夹紧管柱"打开固定卡瓦"控制液压杆上行动作"管柱随之提出井口$当上移行程至上止点时停止液压杆动作"关闭固定卡瓦"打开游动卡瓦"操作液压杆下放"液压杆下放到初始位置$再次按上述操作开关卡瓦"并操作液压杆运动"分多次提出一根油管$下放管柱的过程与提升管柱相反$液压举升装置原理如图%所示$图%!液压举升装置原理=!液压举升装置修井技术在渤海油田的技术方案!!选取渤海油田X L *+$平台作为首次应用的目标平台$$F %!装置选型收集X L *+$平台典型井油管下入深度数据"如图$所示"大多分布在M """C 以下$参考/海洋钻井手册0(%$)"修井作业中的最大管柱重量计算公式如下(%$).U )X =!6%Q J N I 6$Q J N Q 2#Q !%K $#D 'M #X #式中.6%为管柱垂直投影长度"C "取M """C %6$为水平投影长度"C "取"%J N为管柱在空气中的单位长度的重量"_9"取$$N F $%Q 'C %2为摩擦系数"套管内取",$*%#D为修井液密度"9'=C M!取%F %9'=C M #%#X为钢铁密度"9'=C M !取!F #9'=C M#$将上述数值代入公式"可知M """C 井深M +%'$]最大钻具重量为N %F */$修井机最大提升能力P %%<$U )XI M "/=%<$Q N %<*/I M "/=%"M <#/"即修井机的提升力最小需要%"'F '/$根据以往作业经验"考虑分采管柱封隔器解封"提升能力为%*'/的M '"b 液压举升装置能够完成M """C 深井的大修作业$-$*M!-韩树杰"等.液压举升修井技术研究及在渤海油田的首次应用第'期图$!渤海油田井深分布统计!!此外"X L*+$平台井的油管挂外径为%%]"要求液压举升装置的通径大于%%]$M'"b液压举升的通径为%'+%'$]"满足修井的通径要求$$F$!液压举升装置总体安装方案液压举升装置在海洋平台上的安装方式主要有滑移底座承载方式和套管头承载方式两种"如图M 和图'所示$%,液压举升装置%$,防喷器组%M,液压油缸%',支撑框架%*,平台滑轨%N,防喷器组试压台% !,长滑轨%#,加固用工字钢%),短滑轨%%",底座滑轨图M!滑移底座承载方式图'!套管头承载方式示意图$F$F%!滑移底座承载方式X L*+$平台顶部甲板安装有导轨"该导轨是用来安装)"0或者%#"0常规修井机的$与常规修井机总载荷的对比如表$所示$液压举升装置对采油平台顶部甲板导轨施加的总载荷小"可利用导轨承载方式安装$滑移底座承载方式的优点是批量修井时"不需要拆装液压举升装置"作业效率高%与套管头承载方式相比"滑移底座可以悬挂防喷器组一起移动"空井口时间短$缺点是增加了吊装和液压举第!卷海洋工程装备与技术-$*'!-!升装置安装工作量$表=!液压举升装置与常规修井机与导轨载荷对比对比项目M'"b 液压举升装置^底座)"0常规修井机^底座%#"0常规修井机^底座干重'/!*F *$""$$"操作重量'/%*M )"%#"施加在导轨上总载荷'/$$#F *$)"M ""$F $F $!套管头承载方式套管头承载方式对套管头和隔水导管承载能力要求较高"需要对腐蚀最严重的&位于潮差带的隔水导管进行测厚"并对套管头和隔水导管的承载能力进行建模计算$该方式的优点在于可以有效减少液压举升装置的占地面积"缺点是每次变换井位"都需要拆装一次液压举升装置"批量修井时作业效率低$通常根据作业井数及平台情况"确定安装方式$液压举升装置在渤海首次应用X L *+$平台"其作业井数量少"只有$口井"不需要频繁变换井位"所以选择套管头承载方式"能节约时间$!!而且"平台两口注水井隔水导管长*"#C C "壁厚为$*F 'C C "材质为4*$"屈服强度为M N "V &2$根据/平台场址工程地质调查0中极限轴向桩承载力曲线"读取隔水导管外摩擦力约为N ""/$参考/浅海固定平台建造与检验规范0要求"工作环境条件下桩基允许承载力的安全系数为$F ""即允许承载力为M ""/$作业工况下"整体极限载荷约为$$#F */"小于套管最大允许承载力为M ""/"故采用套管头承载方式(%M)$$F M !修井技术流程两口井均为注水井"油管下入深度分别为$N '#C 和%#*"C $液压举升装置的主要作用是起下管柱"将d %井和d $井原常规注水管柱更换为电缆永置分注管柱$液压举升装置的举升行程为M F MC "每M 个行程"可以起出或者下入一根油管"油管单根卸甩在上工作台进行"依托$台小绞车"通过钢丝滑轮"由管桥替代坡道&猫道$管柱附属井下工具&电缆及液控管线的起下以及电缆护罩等的安装拆卸均在装置下操作台进行$使用液压举升装置进行修井作业"技术流程如图*所示$图*!液压举升装置修井技术流程>!现场应用情况液压举升装置在渤海油田X L *+$双井区平台首次成功应用!见图N #"与另一台模块钻机在平台上竖起*双塔+"使无修井机井区故障井实现了快速扶井"为油田稳产&增产提供了一种新的技术手段$M F %!现场应用时效液压举升装置安装与拆除现场作业时间如表N所示"%N 个小时即可完成安装拆除作业$-$**!-韩树杰"等.液压举升修井技术研究及在渤海油田的首次应用第'期图N!液压举升装置渤海首次修井作业现场表>!安装拆除时间统计作业'阶段作业时间'7设备就位'设备安装%"设备拆除N套管头安装井间移位%! !!当修井作业时"洗压井&验封&配管&试压&测调验封等时效与是否使用液压举升装置无关$拆装采油树和立管防喷器&拆装液压举升装置及起下管柱时效与液压举升装置密切相关$将液压举升装置修井作业工时与额定工时进行了统计和对比"如图!所示$图!!液压举升装置修井作业工时与定额工时对比!!经过统计对比分析"结论如下.!%#在起原井管柱&起下冲洗验封管柱的过程中"液压举升装置的工时明显小于定额工时$!$#在安装立管防喷器&试压&下电缆永置管柱的过程中"液压举升装置工时与额定工时持平$!M#液压举升装置作业拆装防喷器需要完全解体"因此在拆防喷器的过程中"液压举升装置工时大于额定工时!'#液压举升装置总工时略大于额定工时$M F$!作业过程中的难题及解决对策M F$F%!井下工具串过长导致卡瓦夹持困难通过对工具串顶部加装短节"增加可夹持长度$同时"利用上&下卡瓦密切配合"确保卡瓦能够夹持在油管上$对于过长的工具串"则动用平台吊车辅助安装$M F$F$!井下工具串直径过大"无法通过卡瓦通过工具串顶部加装短节"增加可加持长度"然后通过上&下卡瓦密切配合"交替拆解"为工具串下入提供空间$也可重新调整卡瓦位置"实现偏心夹持"用绳索固定"更换专用卡瓦$M F$F M!电缆或液控管线穿过固定卡瓦难度大调整下卡瓦方向"使电缆管线通过卡瓦预留窗口"并使用绳索固定下卡瓦"专人看守并调整下卡瓦位置"确保管线穿过$!结!语!%#M'"b液压举升装置采用套管头的安装方第!卷海洋工程装备与技术-$*N!-!式"首次在渤海的应用验证了液压举升装置在渤海油田应用的可行性"为海上修井提供了一种新的技术手段$!$#液压举升装置修井作业与常规修井作业时效相当$!M#在作业过程中"遇到的一些难题还需要进一步研究和改进应对措施"以提高液压举升装置的安全性和作业能力$参考文献(%)张胜宝"王莉"黄志力"等F液压举升装置在海上平台修井作业应用实践(8)F中国石油和化工标准与质量"$"%)"M)!*#.%N!%N#F($)于洋"王玉"宁永庚F液压修井装置在海上采油平台的应用(8)F 天津科技"$"%)"'N!'#"N!!"F(M)王孔强F液压举升修井装置在海上油田的应用(8)F化工设计通讯"$"%)"'*!N#.$*"$*%F(')于大伟F海洋液压修井机的开发与应用(8)F石油机械"$"%#"'N !)#.*M*!F(*)周超"杨向前"郑清华"等F液压修井机行程参数优化设计(8)F科技创新导报"$"%!!)#.#'#!"#!F(N)牛文杰"白永涛"余淼群"等F自动化智能液压修井机结构设计(8)F石油钻采工艺"$"%N"M#!$#"%)*$""F(!)<W J(Q"(Q Y(L J P R:U O"U b:U8J(R U O FW G>?25@1= e-?_-D.?531/!W:U#2B B@1=2/1-313>-e3+7-@.C1@@139 -B.?2/1-3A13Q19.?L.@/2(8)F(;?1=23S.A.2?=7S.D1.e"$"%'"#.%"#%%*F(#)丁辉"陈金稳"周怀亮F海洋液压提升修井机的研究(8)F天津科技"$"%%"M#!*#.M%M M F())冯定"杨志远"柳进"等F液压修井机现状与发展趋势(8)F石油机械"$"%""M#!%#.N)!$F(%")谢永金F我国修井机发展的技术现状与展望(8)F石油机械"$""*"M M!%"#.!$!*F(%%)喻贵民"仵雪飞F海洋修井机国产化进程及发展方向(8)F中国海上油气!工程#"$""M"%*!M#.')*$F(%$)董星亮"曹式敬"唐海雄F海洋钻井手册(V)F北京.石油工程出版社"$"%%F(%M)中国船级社F浅海固定平台建造与检验规范(`)F北京.人民交通出版社"$""'F(%')(&J F&@233139"L.A19313923>O-3A/?5=/139c1E.><;;A7-?.&@2/;-?C A–:-?_139`/?.A AL.A193(`)F(&JS&$(+:`L"$$3>.>"$"%'F。
水下防喷器组控制系统深水模拟试验装置研制
水下防喷器组控制系统深水模拟试验装置研制
顾和元;侯国庆;郭雪;刘立兵
【期刊名称】《石油矿场机械》
【年(卷),期】2013(042)004
【摘要】防喷器组控制系统在深水环境的工作可靠性一直是海洋钻井业高度关注的问题.研制了用于水下防喷器组控制系统及其阀件功能测试和可靠性研究的深水模拟试验装置,包括模拟3 000m水深的大型高压舱,用于控制系统原理样机的深水模拟试验;模拟4 200 m水深的小型高压舱,用于深水电磁阀和深水液压阀的深水功能试验和寿命试验.介绍了该试验装置的液控系统、电控系统、水下监控系统的设计原理.试验结果表明:该试验装置能够满足深水防喷器组控制系统的测试要求.【总页数】5页(P1-5)
【作者】顾和元;侯国庆;郭雪;刘立兵
【作者单位】河北华北石油荣盛机械制造有限公司,河北任丘062552;河北华北石油荣盛机械制造有限公司,河北任丘062552;河北华北石油荣盛机械制造有限公司,河北任丘062552;河北华北石油荣盛机械制造有限公司,河北任丘062552
【正文语种】中文
【中图分类】TE951
【相关文献】
1.深水防喷器组及控制系统实验教学平台研制 [J], 蔡宝平;刘永红;艾白布·阿不力米提;于示林;王龙庭;董欣
2.深水钻井水下防喷器组配置选型研究 [J], 王存新;李嗣贵;王增国
3.深水钻井喷射下导管模拟试验装置的研制 [J], 柯珂;张辉;周宇阳;王磊;冯士伦
4.深水防喷器组控制系统的模拟分析 [J], 李博;李迅科;葛斐;盛磊祥;许亮斌
5.深水石油钻采工程模拟试验装置的研制 [J], 杨进;刘书杰;周建良;严德;田瑞瑞;李春
因版权原因,仅展示原文概要,查看原文内容请购买。
海洋平台修井机火气系统基本设计
海洋平台修井机火气系统基本设计邓忠彬;罗小昌;李浩;彭程;吴群英【摘要】为实现修井机发生火灾或气体泄漏时,系统能发出报警信号,及时关闭相关电源和暖通设备,启动消防设备进行相关处置,同时与平台中控火气盘进行通讯、显示并进行相应处理,开发火气系统,基本设计包含对火气系统的组成、功能和接口进行相应的规定,对修井机火气系统在海洋石油钻井平台上推广使用提出相应的建议.%When fire accident or gas leakage happens, the alarm system will discrete sampling, turn of the related power source, heating and ventilation device.It will also contact with the fire control panel of the platform and start the fire control ap-paratus to deal with the accident.The basic design of fire and gas system includes basic provisions of composing, function and connector of the system.The working principle and basic design of the fire and gas system is introduced, and some suggestions a-bout promoting the use of the fire and gas system of the workover rig on the offshore oil drilling platform are put forward.【期刊名称】《船海工程》【年(卷),期】2015(044)005【总页数】4页(P5-8)【关键词】火气系统;FM200自动灭火系统;火灾;探测器【作者】邓忠彬;罗小昌;李浩;彭程;吴群英【作者单位】中海油能源发展装备技术有限公司,天津300452;中海油能源发展装备技术有限公司,天津300452;中海油能源发展装备技术有限公司,天津300452;中海油能源发展装备技术有限公司,天津300452;中海油能源发展装备技术有限公司,天津300452【正文语种】中文【中图分类】U672.7;P752修回日期:2015-09-01研究方向:海洋钻修机设备设计和维保E-mail:************************随着海洋石油事业的蓬勃发展,对海上石油平台的安全生产提出了更高的要求,特别是钻修井设备在作业期间的安全显得尤为重要。
海洋钻井平台主空压机控制系统改造
海洋钻井平台主空压机控制系统改造王伦【摘要】为解决\"勘探四号\"半潜式海洋钻井平台主空压机控制设备老化、控制设备备件断货、故障率高和自动化程度较低等问题,探讨了主空压机的工艺流程、控制设备组成、控制系统要求和提高控制系统可靠性的方法,并基于西门子S7-200 PLC和MCGS触摸屏进行程序设计和编程,对原控制系统进行改造,有效地解决了空压机的原有故障,节约了空压机整机换新的成本,可为类似空压机的故障解决和控制系统改造及设计提供参考.【期刊名称】《电气传动》【年(卷),期】2019(049)001【总页数】6页(P59-64)【关键词】勘探四号;海洋钻井平台;主空压机;空压机控制;西门子S7-200【作者】王伦【作者单位】中石化海洋石油工程有限公司上海钻井分公司,上海 201206【正文语种】中文【中图分类】TP29海洋钻井平台主空压机作为钻井平台的主要气源,担负着防火风闸和阀门等控制;且担负着气动隔膜泵、打磨机和绞车等驱动及柴油机启动、空气吹扫、正压防护等重要使命,如果发生故障,钻井作业将无法正常进行,其控制系统的可靠性直接关系着安全生产。
“勘探四号”主空压机(简称本空压机)共3台,采用美国进口的INGERSOLL RAND(英格索兰)SSR-2000型,生产于20世纪80年代,原控制主要采用电路板和继电器,由于使用年代久远,电气设备老化,存在触点接触不良导致系统运行不稳定的情况[1],经常发生无法启机、不能加载或卸载等故障,无法满足钻井作业对设备高可靠性的要求,同时存在部分电气设备备件断货和自动化程度较低等问题,整机换新或改造迫在眉睫。
然而,整机换新成本较高,且部分空压机器件质量优良并已定期维保和大修,整机换新将造成浪费,保留空压机主机、电动机、进排气系统、喷油及油气分离系统、冷却系统和控制系统中的部分元器件,对控制系统进行改造成为最合理的改造方式。
基于控制系统的稳定可靠性和方便备件采购考虑,原考虑使用现流行的英格索兰原装SSR UP控制器。
海洋修井平台热源系统设计
海洋修井平台热源系统设计徐增强【摘要】胜利作业六号平台为自升式海洋修井平台,需要热源系统进行加热、保温.对热媒介质和蒸汽特性进行了比较,选定蒸汽系统作为热源系统;对蒸汽消耗量进行计算,确定了锅炉的总蒸汽量.简述了锅炉饱和蒸汽产生的过程,在采用热力除氧为主,辅以联氨(肼)除氧的同时,对锅炉水处理系统引入了Na-交换软化法.对蒸汽高压输送和低压使用的方法进行了分析,通过计算,发现蒸汽减压阀对蒸汽烟效率的影响很小;选择热波纹管式疏水阀作为连接用汽点和冷凝水回收系统的重要纽带,进行冷凝水回收,节约了能源,提高了效率.【期刊名称】《石油化工自动化》【年(卷),期】2014(050)005【总页数】5页(P9-13)【关键词】自升式;修井平台;热源系统;蒸汽系统【作者】徐增强【作者单位】中国石油大学(华东)石油工程学院,山东青岛266580;胜利石油工程有限公司钻井工艺研究院海洋工程装备研究所,山东东营257017【正文语种】中文【中图分类】TP214胜利作业六号平台为自升式海洋修井平台,钢质非自航,可以完成海上单井或井组的洗井、压井、冲沙、检泵、分层等起下管柱修井作业[1]。
自升式海洋修井平台在移航中一般采用托航的方式[2],因而平台没有蒸汽动力装置及蒸汽涡轮发电机等主动力设备所组成的推进系统[3]。
但是海洋平台需要热源系统来发挥以下作用:液舱加热、保温,作业甲板油污吹扫,海底门融冰、吹扫,海水泵底部融冰,试油设备加热以及杂用等。
笔者结合工程实际,对自升式海洋平台热源系统进行了调研分析,完成了胜利作业六号平台热源系统的设计工作。
1 热源系统选择海洋平台所用热源系统主要有蒸汽热源系统、热水加热系统和热媒油加热系统3种[4]。
表1反映了不同热媒介质的参数比较情况。
与蒸汽相比较,水的热容量低,通常需要用泵来使大量水在系统中循环以满足流程或空间加热需求。
蒸汽则可以方便、高效地输送到用汽点,其所携带的热量相当于同等质量水所能携带热量的5~6倍,是可长距离传递热量的载体之一。
海洋修井机电控系统简介

2.自动化控制采用冗余的PLC控制,全线设置1台HMI伺钻台采用MP370、工业计算机 及I/O站的结构。整个控制系统采用PROFIBUS-DP现场局域网将可编程序控制器、司 钻台、传动柜、一体化仪表系统等连接在一起,通讯速率为1.5M,实现对控制系统 的速度、力矩等各种参数的控制,可对钻机中的任何一台传动装置进行启动、停止、 点动紧控制和参数设定。
1台
3.2 转盘变频装置 变频柜基本技术参数 允许的湿度 相对湿度≤95%,不允许凝露 防护等级标准 IP20 额定输入电压 3AC 500V(-15%)~600V(+10%) 额定输出电压 3AC 0V ~电网电压 额定电网频率 50/60 Hz(±6%) 输出频率V/f=常数 0Hz~200 Hz 输出频率V =常数 8Hz~300 Hz 基本负载电流 0.91*额定输出电流 短时电流 当60s时为1.36*额定输出电流
二、电控系统概述
配备电机总功率: 800kw(绞车)+ 300kw(转盘)+ 2×580kw(泥浆泵)
主刹车冷却方式: 风冷 ,辅助刹车系统: 能耗制动
整机传动方式: AC-SCR-DC(泥浆泵)传动与AC-VVVF-AC(绞车、转盘) 系统采用西门子公司S7-300可编程序控制器、6SE70系列变频器、6RA70系列 直流传动装置及智能操作单元构成钻机一体化的修井机控制系统。
动力系统 动力系统是由“三合一”的发动机橇座(三台柴油机/发电机)、发电机房、发电机并 车控制柜、发电机控制系统和燃油罐组成,发电机(带消音设施)由柴油机驱动,足以提 供连接载荷的动力。
三、系统技术参数
2. 绞车系统
2.1 变频电动机技术参数
额定功率: 800 kW 额定电压: 600 V AC 额定电流: 946 A AC 额定转速: 740 rpm 额定转矩: 10310 Nm 恒功率最高转速: 1253 rpm 功率因数: 0.853 效率: 0.914 数量 1台
海洋钻机管汇设计与计算_何军国
D e s i n a n d C a l c u l a t i o n t o t h e O f f s h o r e R i P i i n S s t e m g g p g y
HE J u n u o -g
( , , T e c h n i u e C e n t r e, R G P e t r o- M a c h i n e r G r o u C O. L t d. N a n a n 7 3 0 0 6, C h i n a) q y( p) y g4
: A b s t r a c t T h e o f f s h o r e d r i l l i n r i i i n s s t e m i s c l o s e l r e l a t e d t o t h e r i s a f e t a n d r o t e c t i o n g g p p g y y g y p o f t h e m a r i n e e n v i r o n m e n t . I t i s a l s o a n i m o r t a n t c o m o n e n t o f t h e o f f s h o r e d r i l l i n r i . T h r o u h p p g g g , a n a l s i s o f a d a t a t i o n o f t h e s t a n d a r d a n d c o d e c o n s i d e r a t i o n s a r e f o r w a r d t o t h e t h e u t i i n y p p p p g d e s i n. T h e s t r e s s a n a l s i s s o f t w a r e i s u s e d t o t h e s s t e m f o r s t r e s s c a l c u l a t i o n a n d s s t e m i i n g y y y p p g m o d a l i i n a n a l s i s . T h e c o d e s t r e s s a n d t h e n a t u r a l f r e u e n c o f t h e s s t e m a r e o b t a i n e d a n d p p g y q y y d e s i n c o n c e r n s f o r t h e d i f f e r e n t s s t e m a r e f o r w a r d t o o b t a i n t h e s t e e l b r a c k e t t h e i i n u t g y p p g p e f f e c t s o n t h e n a t u r a l f r e u e n c o f t h e m a n i f o l d v a l v e s u n i t . T h e s e a n a l s i s m e t h o d s m e e t f o r t h e q y y , s t a n d a r d r e u i r e m e n t a n d i m r o v e t h e d e s i n u a l i t a n d r o v i d e t h e u i d a n c e t o t h e d e s i n, c a l - q p g g q y p g c u l a t i o n a n d s e r v i c e f o r t h e l a n d d r i l l i n r i s s t e m. i i n g g y p p g : ; K e w o r d s o f f s h o r e d r i l l i n r i i i n s s t e m; d e s i n; s t a n d a r d g g p p g y g y 檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪
2 250 kN海洋钻修机模块设计

2 250 kN海洋钻修机模块设计
毕小钧;程鹏;杨秀菊;牛毅;冯小军
【期刊名称】《石油机械》
【年(卷),期】2014(42)11
【摘要】为配套海上采油平台而设计了2 250 kN海洋钻修机模块.2 250 kN海洋钻修机模块在设计上充分满足平台布局要求紧凑性和模块化的要求,采用联合驱动的传动系统设计也满足用户对钻机模块经济性的要求.井架结构设计打破常规,采用从基段两侧进钻杆的方案及自升式结构,可满足钻机在不同区位作业的便捷性要求.绞车采用交流变频联合驱动的传动形式,底座采用大模块化的结构形式,从而满足CEPI和CEPJ固定式采油平台钻机作业区域小和移动跨距大的需求.该钻机设计中采用的一些新方法可降低固定式平台钻修机模块的建造成本,亦可缩短建造周期.【总页数】4页(P155-158)
【作者】毕小钧;程鹏;杨秀菊;牛毅;冯小军
【作者单位】国家油气钻井装备工程技术研究中心;宝鸡石油机械有限责任公司;国家油气钻井装备工程技术研究中心;宝鸡石油机械有限责任公司;国家油气钻井装备工程技术研究中心;宝鸡石油机械有限责任公司;宝鸡石油机械有限责任公司;宝鸡石油机械有限责任公司
【正文语种】中文
【中图分类】TE952
【相关文献】
1.海洋模块钻修机完整性管理系统开发 [J], 刘康;陈国明;朱本瑞;畅元江;邓欣;陈实
2.海洋钻修机模块结构耐久性评估 [J], 朱本瑞;陈国明;康健;刘康
3.海洋钻修机模块载荷工况分析 [J], 程鹏;李全星;刘刚强;颜岁娜;赖晨晨;杨鹏;;;;;;
4.海洋钻修机模块结构完整性评估技术研究与实践 [J], 叶剑
5.海洋平台模块钻修机继电保护系统研究 [J], 许鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
DYJ250海洋液压修井机的设计

DYJ250海洋液压修井机的设计
刘亮;徐文江;张有锋;吕慧敏;张小丹;刘均让;王琳
【期刊名称】《机械工程师》
【年(卷),期】2022()12
【摘要】为突破国外海洋液压修井机核心技术,保障海洋油气的勘探开发,中海油田服务股份有限公司与宝鸡石油机械有限责任公司联合研制了首台国产海洋液压修井机。
文中从主要结构组成、主要设计参数、关键部件的设计、主要技术特点、试验验证等方面详细描述了DYJ250海洋液压修井机的设计过程。
最后通过现场试验表明,DYJ250海洋液压修井机的设计具有模块化、质量轻、占地面积小、适应性强、快速作业、安全可靠等特点,各项性能满足平台使用要求。
【总页数】4页(P166-168)
【作者】刘亮;徐文江;张有锋;吕慧敏;张小丹;刘均让;王琳
【作者单位】中海油田服务股份有限公司;中国海洋石油集团有限公司;宝鸡石油机械有限责任公司
【正文语种】中文
【中图分类】TE935
【相关文献】
1.海洋液压修井机的开发与应用
2.海洋修井机液压油乳化成因分析及液压油箱优化设计
3.海洋液压提升修井机的研究
4.新型海洋液压修井机在埕北油田的配套研究与应用
5.海洋液压修井机研制应用现状及趋势
因版权原因,仅展示原文概要,查看原文内容请购买。
海上平台修井机BOP提升系统优化
海上平台修井机 BOP提升系统优化摘要:某海上平台修井机BOP提升系统使用手拉葫芦作为动力源,主要用于BOP系统在井口区域更换井位、安装。
现BOP提升系统移动时难以保证手动葫芦跑车同步,葫芦滚轮与轨道打滑造成移动困难。
本文从空间布置、结构等方面分析,重新设计悬挂方案,且优化动力源,从而解决BOP提升系统同步及打滑等问题,提高设备的可靠性。
关键词:平台修井机BOP,提升系统,同步,打滑前言:某海上平台修井机BOP提升系统使用手拉葫芦作为动力,其设计主要用于BOP在中层井位更换及安装。
BOP系统移动主要靠顶部的3条轨道6台20T手动葫芦跑车完成,轨道悬挂BOP移动时,必须6个手动葫芦跑车同步动作。
而设计轨道跨度太大,移动时难以保证葫芦跑车同步,导致跑车的受力点不均匀造成移动困难。
优化设计悬挂方案,改造为电动提升、行走动力源,设备调试合格,满足现场使用要求。
1.电动航吊技术参数最大提升负荷:20T+20T,最大提升行程:9000mm,最大起升速度:1.8m/min,最大主机移动速度:8m/min,钢丝绳直径:4×φ15mm1.电动防喷器移动装置主梁强度承重计算结合电动防喷器控制装置的参数、重量载荷、截面外形尺寸,计算跨中大梁强度;水平平面内(大车制动惯性力)的强度计算绕度:1.新BOP航吊安装1.新BOP航吊导轨梁、行车、导轨梁支撑吊装到中层由上甲板吊装航吊导轨梁、行车、导轨梁支撑至中层,中层人员在结构梁上挂3吨倒链带着导轨下端平放航吊导轨梁4条、行车2部、导轨梁支撑3条在中层甲板。
1.新BOP航吊支撑梁下料焊接、下导轨安装BOP吊下导轨采用H440×300×11×18mm工字钢制作,靠外挂井槽侧的支撑通过φ273×14mm钢管和上层甲板H900工字梁底部连接;中部支撑通过φ273×14mm钢管和BOP甲板H700工字梁连接;另一侧支撑通过H440×300×11×18mm工字钢和上层甲板H900工字梁底部连接;下导轨安装方式如下图所示:1.安装BOP航吊导轨行车上甲板底部工字梁处安装工字梁卡使用2吨倒链拉起BOP航吊行车到行车导轨上就位安装,安装行车导轨两侧限位挡板等附件。