基于ARM和DSP的INS/GPS组合系统设计
基于ARM处理器的GPS导航系统设计报告
基于ARM处理器的GPS导航系统设计报告一.引言随着我国经济水平的快速发展,汽车行业也蓬勃发展起来。
汽车的增长速度远远超过公路的增长速度,汽车拥有量的急剧增加和城市现代化交通建设的相对滞后导致城市交通情况不断恶化。
同时,现代物流对运输车辆和货物安全与准时调运的要求、公交与出租车的运营管理、大型的企事业单位日常车辆管理也都对车辆的监控与导航有迫切的需求。
面且随着旅游行业的发展,人们急需要一种可以随时随地知道自己方位和目的地的方便设备。
GPS(全球定位系统)具有全球、全天候工作,定位精度高,功能多,应用广的特点,通过GPS 接收机可以实现精确的自主定位,这为实现车辆的定位和导航奠定了基础。
伴随ARM处理器、嵌入式操作系统、路径优化控制算法和GPS网络的成熟,车辆定位导航系统有了新的发展,可以在短时间内实现定位和最优路径导航。
本项目在信息系统终端的设计中采用了ARM处理器和嵌入式操作系统uC/OS-II作为开发平台,通过采用ARM处理器可达到最大为60MHz的CPU操作频率,使得数据处理能力大大加强,同时,基于嵌入式操作系统uC/OS-II开发设计的软件具备了很强的扩展性和稳定性。
二.方案简介1.功能简介该嵌入式GPS导航系统由GPS系统获得当时所在的位置的经纬度,通过换算和地图匹配在地图上得到当时的实际位置,然后由用户输入目的地,通过A*最短路径算法计算最短路径并在矢量地图上显示,同时提取GPS提供的速度,时间等信息显示在屏幕上。
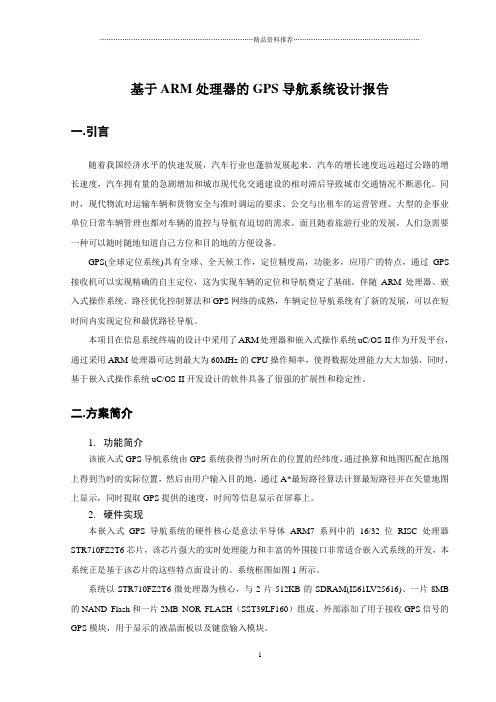
2.硬件实现本嵌入式GPS导航系统的硬件核心是意法半导体ARM7系列中的16/32位RISC处理器STR710FZ2T6芯片,该芯片强大的实时处理能力和丰富的外围接口非常适合嵌入式系统的开发,本系统正是基于该芯片的这些特点面设计的。
系统框图如图1所示。
系统以STR710FZ2T6微处理器为核心,与2片512KB的SDRAM(IS61LV25616)、一片8MB 的NAND Flash和一片2MB NOR FLASH(SST39LF160)组成。
开题报告—基于arm嵌入式gps

应用实践已经证明,GPS相对定位精 度在50KM以内可达10-6,100-500KM可 达10-7,1000KM可达10-9。在3001500M工程精密定位中,1小时以上观测 的解其平面其平面位置误差小于1mm, 与ME-5000电磁波测距仪测定得边长比 较,其边长较差最大为0.5mm,校差中误 差为0.3mm。
GPS 的优越性
一、定位精度高
GPS定位系统由于其定位的高度灵活 性和常规测量无法比拟的高精度,成为 测量学科中革命性的变化。因为测量点 位不象经典三角测量一样有等级之分, 不存在误差的积累,测点可以在真正需 要的地方进行,无需过渡点,点间不需 要有造标,通视等问题的考虑。而且观 测点位又不与重力场发生关系,避免了 复杂的归算。这种布网方式可以把平面 及高程同时求出,而不需要平高分开。
UDP/IP/PPP协议支持及统一的MAC访问层接口,为各种移动计算 设备预留接口. • (6)强稳定性,弱交互性。嵌入式系统一旦开始运行就不需要用户过多 的干预,这就要负责系统管理的EOS臭有较强的稳定性。嵌入式操作 系统的用户接日一般不提供操作命令,它通过系统调用命令向用户程 序提供服务。 • (7)固化代码。在嵌入系统中,嵌入式操作系统和应用软件被固化在 嵌入式系统计算机的ROM中。辅助存储器在嵌入式系统中很少使用, 因此,嵌入式操作系统的文件管理功能应该能够很容易地拆卸,而用 各种内存文件系统. • (8)更好的硬件适应性,也就是良好的移植性.
基于嵌入式系统的GPS模块设计与实现
课题类型:AXR
专业:电子信息工程
指导老师:郭 乐 深 演讲人:徐 超
嵌入式系统的背景
• 20
•
Palm OS WinCE Lynx Nucleux Delta Os
基于ARM处理器的车载GPS系统设计方案
基于ARM处理器的车载GPS系统设计方案1 引言车载GPS定位终端在过去十年内已经成为汽车工业发展的焦点。
在欧美国家和日本,车载GPS定位终端在最近几年内得以广泛的应用。
车载GPS定位终端是融全球卫星定位技术(GPS)和现代无线通信技术于一体的高科技系统。
该终端的主要功能是通过GPS模块从卫星获取GPS数据,将移动车辆的动态位臵(经度、纬度、时间、速度)等信息实时地通过无线通信链路上传至监控中心,同时接收监控中心发送的控制命令。
目前的车辆监控系统中大多采用GSM通信网以短信息的方式进行通信,不能充分满足实际应用的需要。
而GPRS(General Packet Radio Service)通用分组无线业务是一种以分组交换技术为基础,采用IP数据网络协议的高效数据传输网络,可以弥补GSM网络的不足。
车载GPS定位终端不仅在智能交通系统中担负主要作用,同时还可以提供防盗防抢劫报警,公交车报站,物流车辆调度等多种服务。
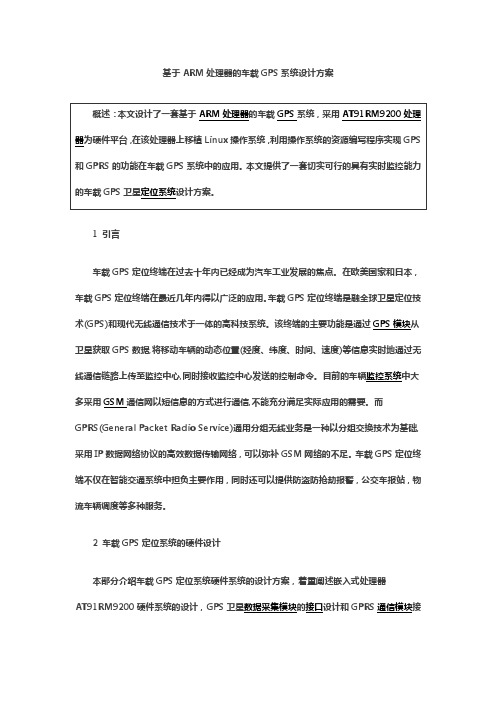
2 车载GPS定位系统的硬件设计本部分介绍车载GPS定位系统硬件系统的设计方案,着重阐述嵌入式处理器AT91RM9200硬件系统的设计,GPS卫星数据采集模块的接口设计和GPRS通信模块接口的设计。
如图1所示,车载GPS定位系统的硬件结构主要由GPRS接收模块、GPS接收模块、SDRAM,FLASH存储器模块、串口通信模块,以及外围模块组成。
图1车载GPS定位系统的硬件结构组成2.1 GPRS接收模块电路设计GPRS模块负责主电路板与监控中心的通信任务,它将处理好了的GPS数据通过网络发送给监控中心,并接收监控中心发送给主电路板的控制命令,该模块直接影响到这个车载终端的实际使用效果。
本系统选用的GPRS模块是由索尼爱立信公司推出的GR47模块,该模块的主要特点是内臵TCP/TP协议栈。
它允许一个TCP/UDP传输机制以最小的前期配臵和操作来被使用。
其内嵌控制器方便集成客户的应用,减少外部控制器的需求。
一种基于DSP的SINS/GPS组合导航系统实现
漂移 。
状 态方 程为 :
X — F s X + G + W/s N () 2
系 统的 噪声 为 :
7 LS L 5N — J , , , , 硼 , 训 , , , j
1 引 言
目前 S NS GP I / S组 合 导 航 系 统 是 被 认 为 导 航
领域 最理 想 的组 合方 式 。捷 联 惯 导 系 统 ( I ) S NS 是
通过 测量 飞行 器 的角速 度 和加 速度 , 自动进 行 积 并
本 论文 将 基 于 TMS 2 F 8 2数 字 信 号 处 理 30 2 1 器 的平 台 , 使用 集 成惯 性 导航 I MU 元件 和 GP S接 收机 , 分别 建立 T 3 0 2 1 字 信 号 处理 器 与 MS 2 F 8 2数 I 单 元和 GP MU S单元 的通 信 , 架 出 一套 组 合 导 构
() 1
本 系统采 用 u lx公 司的 L A一 bo E 5型 G S接 收 P 模 块 。它是低 价 位 、 靠性 高 、 位 精 度 较 高 和低 可 定 功耗 的 1 2通道 接收机 , 以提供 丰 富 的导航 信息 , 可 并且 可 以由用户 定制所 需 的导航 信息 , 常适合 于 非
卡 尔 曼 滤 波器 取 S NS输 出的 导 航 参 数 的误 I 差作 为组 合导 航 的状 态量 , 因此 SNS的误 差 方程 I 就 是组合 导航 系统状 态方 程 的主要组成 部分 。 选择惯 性 导航系 统 的 3个位 置 误 差分 量 、 3个
速度 误差分 量 和 3个姿 态角误 差 分量 , 同时对 它 的 有色 噪声进 行扩 展 , 陀螺仪 和加 速度 计 的误差 作 将 为状 态分量 。
基于DSP和ARM的车载组合导航计算机设计
收稿日期:2010-08-08作者简介:龚柏春(1987—),男,江西南昌人,硕士研究生,主要研究方向为惯性导航与组合导航。
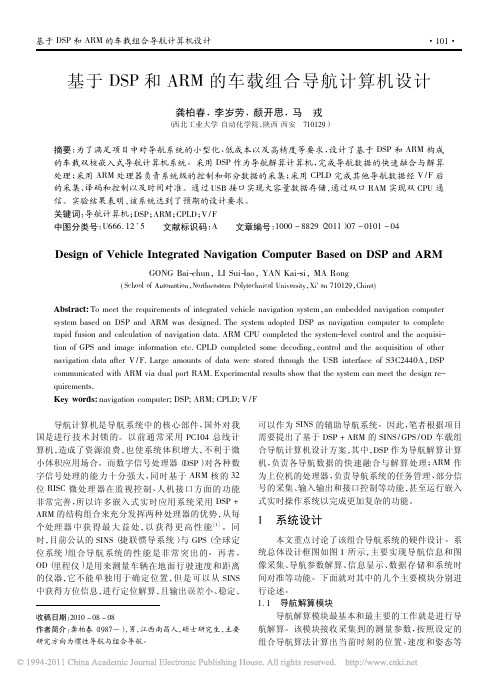
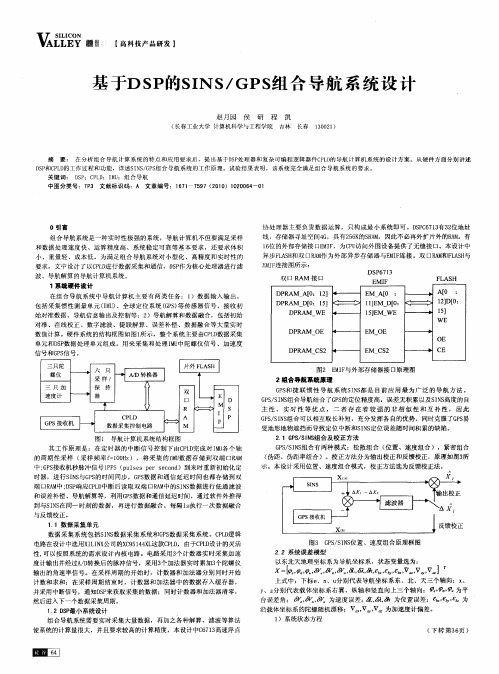
基于DSP 和ARM 的车载组合导航计算机设计龚柏春,李岁劳,颜开思,马戎(西北工业大学自动化学院,陕西西安710129)摘要:为了满足项目中对导航系统的小型化、低成本以及高精度等要求,设计了基于DSP 和ARM 构成的车载双核嵌入式导航计算机系统。
采用DSP 作为导航解算计算机,完成导航数据的快速融合与解算处理;采用ARM 处理器负责系统级的控制和部分数据的采集;采用CPLD 完成其他导航数据经V /F 后的采集、译码和控制以及时间对准。
通过USB 接口实现大容量数据存储,通过双口RAM 实现双CPU 通信。
实验结果表明,该系统达到了预期的设计要求。
关键词:导航计算机;DSP ;ARM ;CPLD ;V /F中图分类号:U666.12+5文献标识码:A 文章编号:1000-8829(2011)07-0101-04Design of Vehicle Integrated Navigation Computer Based on DSP and ARMGONG Bai-chun,LI Sui-lao,YAN Kai-si,MA Rong(School of Automation,Northwestern Polytechnical University,Xi an 710129,China)Abstract:To meet the requirements of integrated vehicle navigation system,an embedded navigation computer system based on DSP and ARM was designed.The system adopted DSP as navigation computer to complete rapid fusion and calculation of navigation data.ARM CPU completed the system-level control and the acquisi-tion of GPS and image information etc.CPLD completed some decoding,control and the acquisition of other navigation data after V /F.Large amounts of data were stored through the USB interface of S3C2440A,DSP communicated with ARM via dual port RAM.Experimental results show that the system can meet the design re-quirements.Key words:navigation computer;DSP;ARM;CPLD;V /F 导航计算机是导航系统中的核心部件,国外对我国是进行技术封锁的。
基于ARM嵌入式GPS导航系统软硬件设计.
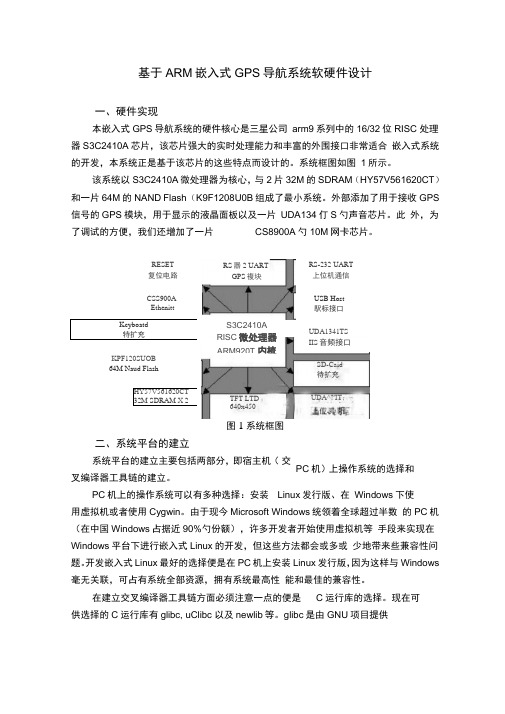
基于ARM 嵌入式GPS 导航系统软硬件设计一、硬件实现本嵌入式GPS 导航系统的硬件核心是三星公司 arm9系列中的16/32位RISC 处理器S3C2410A 芯片,该芯片强大的实时处理能力和丰富的外围接口非常适合 嵌入式系统的开发,本系统正是基于该芯片的这些特点而设计的。
系统框图如图 1所示。
该系统以S3C2410A 微处理器为核心,与2片32M 的SDRAM (HY57V561620CT ) 和一片64M 的NAND Flash (K9F1208U0B 组成了最小系统。
外部添加了用于接收 GPS 信号的GPS 模块,用于显示的液晶面板以及一片 UDA134仃S 勺声音芯片。
此 外,为了调试的方便,我们还增加了一片CS8900A 勺10M 网卡芯片。
Kcyboatd 特扩充 KPF120SUOB 64M Naud FlashHY57V561620CT 32M SDRAM X 2图1系统框图二、系统平台的建立系统平台的建立主要包括两部分,即宿主机( 交叉编译器工具链的建立。
PC 机上的操作系统可以有多种选择:安装 Linux 发行版、在 Windows 下使 用虚拟机或者使用Cygwin 。
由于现今Microsoft Windows 统领着全球超过半数 的PC 机(在中国Windows 占据近90%勺份额),许多开发者开始使用虚拟机等 手段来实现在 Windows 平台下进行嵌入式Linux 的开发,但这些方法都会或多或 少地带来些兼容性问题。
开发嵌入式Linux 最好的选择便是在PC 机上安装Linux 发行版,因为这样与Windows 毫无关联,可占有系统全部资源,拥有系统最高性 能和最佳的兼容性。
在建立交叉编译器工具链方面必须注意一点的便是C 运行库的选择。
现在可供选择的C 运行库有glibc, uClibc 以及newlib 等。
glibc 是由GNU 项目提供RESET复位电路 CSS900A EthenittUDA1341TS IIS 音频接口 SD-Caid 待扩充TFT LTD 640x450UDA^?'IT ;PC 机)上操作系统的选择和S3C2410A RISC 微处理器 ARM920T 内梳RS 器2 UART GPS 複块RS-232 UART 上位机通信 USB Host 駅标接口的标准C运行库,它针对PC应用设计,较庞大,但能提供最优的兼容性。
基于arm的GPS导航定位系统设计
基于arm的GPS导航定位系统设计江苏科技大学本科毕业设计(论文)基于ARM的GPS导航定位系统设计ARM-based GPS navigation system design摘要GPS(全球定位系统)是一种全方位的实时定位技术,随着GPS技术的发展,以ARM处理器作为主CPU的嵌入式硬件平台几乎已经成为信息产业的硬件标准。
一方面,它具有体积小、性能强、功耗低、可靠性高等特点;另一方面,它为高速、稳定地运行嵌入式操作系统提供了硬件基础。
本文以Windows CE为嵌入式操作系统,对基于ARM的GPS 定位系统的开发进行了研究与实现。
硬件平台设计以三星公司的ARM920T核的S3C2410为微处理器,对以下三个方面的技术进行了研究:一是对GPS及嵌入式技术进行了介绍,介绍了GPS技术原理、特点、和定位方式;二是搭建基于ARM的硬件平台,对电源电路,存储电路等进行了设计;三是对GPS模块及通讯接口进行了设计。
关键字:GPS ARM Windows CE操作系统AbstractGPS (Global Positioning System) is a comprehensive real-time positioning technology, with GPS technology to ARM processor as the main CPU of the embedded hardware platform has almost become the information industry hardware standards.On the one hand ,it has a small,strong performance,low power,high reliabity:on the other hand,it is high speed,stable operation and provides a hardware based embedded operatingsystem.In this paper, Windows CE embedded operating system, ARM-based GPS positioning system and implementation of development studied.Platform designed to Samsung S3C2410 ARM920T microprocessor core, on the following three techniques were studied: one on the GPS and embedded technologies are introduced, introduced the principle of GPS technology, features, and positioning means ; Second, ARM-based hardware platform built on the power supply circuit, memory circuit design, etc.; Third, GPS module and the communication interface is designed.Keywords: GPS ARM Windows CE Operation System目录第一章绪论 01.1嵌入式技术研究背景 01.2GPS技术研究背景 (1)第二章 GPS技术基本原理 (2)2.1GPS基本原理 (2)卫星的位置 (2)卫星与用户间的相对距离 (3)卫星信号的解算 (3)的定位方式 (4)2.2GPS发展前景 (5)第三章嵌入式系统设计 (7)3.1嵌入式系统 (7)3.2W INDOWS CE嵌入式操作系统 (7)3.3W INDOWS CE系统框架 (8)3.4嵌入式软件平台开发 (9)开发 (9)开发 (10)3.5ARM技术介绍 (12)处理器的体系结构 (12)微处理器概述 (13)第四章系统硬件及GPS模块设计 (14)4.1总体硬件设计方案 (14)系统硬件的选择 (14)处理器 (15)4.2系统硬件电路设计 (15)电源电路 (18)串口电路 (19)电路 (19)电路 (21)显示电路 (21)4.3GPS模块电路设计 (23)模块选择 (23)模块与主机的串口通信 (23)第五章系统软件设计 (25)5.1NEMA0183协议 (25)5.2GPS程序设计 (25)5.3用户界面 (30)总结 (32)致谢 (33)参考文献 (34)附录 (35)第一章绪论1.1 嵌入式技术研究背景随着计算机和通信技术的快速发展,嵌入式系统己经广泛渗透到人们的工作、生活中,从家用电器、手持通讯设备、信息终端、仪器仪表到汽车、军事装备、制造工业、过程控制等。
基于DSP的SINS/GPS组合导航系统设计
DS 71 P6 3
DP AM R
_
A【:1] O 2
D[ :1 ] 0 5
_
E A[ : M 0
1] M 0 1E D[:
n[ : 0
1] 0 2D[:
DP RA M
DP AM R WE
DP RAM OE
1]M_ 5E WE
示 。本设 计采 用位 置 、速度组 合模 式 ,校正方 法选 为反 馈校 正法 。
11 数据采 集单 元 .
数据 采集 系 统 包括 SN 数据 采 集系 统 和G S IS P 数据 采 集 系统 。C L逻 辑 PD
电路在设 计 中选 用XL N公 司 的X9 14L I IX C 54X 这款 CL , 由于CL 设 计的灵 活 PD PD 性, 以按照 系 统 的需求 设计 内核 电路 。电路 采用 3 计 数器 实 时采 集加速 可 个 度计输 出并 经过A D / 转换后 的脉冲 信 号 ,采 用3 个加 法器 实 时累加3 陀螺 仪 个 图3 GS SN 位置 、速 度组 合原 理框 图 P/ IS 2 2系 统误差 模 型 以东北 天地理 坐标 系为 导航 坐标 系 ,状 态变 量选 为 :
E M oE
1] 5
WE
数值计 算 。硬件系 统 的结构框 图如 图 l 所示 ,整个 系 统主要 由C L数据 采集 PD 单元和 DP 据处 理单 元 组成 。用 来采 集和 处 理IU S数 M 中陀 螺仪信 号 、加 速度 信号和G S P 信号 。
OE DP RAM 2 CS E 2 M CS C E
0引言
协 处理 器主 要 负责 数据 运算 , 只构 成最 小 系统 即可 。D P 6 1 有3 位地 址 SC 73 2
基于ARM的GPS定位系统设计_图文.
计算机应用 2008年8月第4期1引言基于ARM的GPS定位系统设计西安邮电学院杨春杰摘要介绍了基于A蹦芯片LPc2131的GPs定位系统的设计及实现,其中LPc2131为核心处理器,它接收GPs信息并对其进行处理,然后通过GsM模块把处理后的信息发送到GsM网络,任何和GsM短信服务兼容的平台都可以获取此信息并做相关应用。
关键词LPC2131GPS定位 GsMGPs(全球定位系统在导航领域有着广泛的应用,它可以准确给出对象所处的经纬度及时间、速度等信息,以便于对象的精确定位,从而便于导航、搜寻、报警、监控等工作的实施;ARM是流行的嵌入式技术之一,在数据处理的速度及方式上有着传统 MCU无法比拟的优势,一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及用户的应用程序四个部分组成,其中,操作系统的大小可根据功能进行裁剪。
此外,除结构体系优势外,ARM的接口资源也极其丰富;GSM(Global Svstem for Mobile Commullications是一种起源于欧洲的移动通信技术标准,它提供了一个开放性的空中与网络接口,业务涵盖了语音、短消息及数据等内容。
2定位系统硬件组成为了保证通用易行,设计采用了被广泛使用的 GARMIN公司GPS25LVS模块作为GPS信号的接收端,它将GPS接收机的主要部件做成大规模集成电路片,并集成在一块电路板上。
GPS25LVs串口l输出 NMEA 0183版本2.00的ASCⅡ码语句,该语句包含时间、日期、方位、速度和磁偏角等信息,其串口输出电平为Rs232标准电平,可方便地和PC机或灿蝴处理器相连;AI己M处理器选择LPC2131,它是一个小封装、低功耗且支持实时仿真和嵌入式跟踪的 16/32位ARM7rIDMI.S CPu;GsM模块则选用西门子公司的TC35i模块,它集成了数据采集、数据传输及短信息服务等功能。
LPC2131先通过GPs25L,VS接收信息,信息处理后送到GSM模块发送,所发送的信息包括了目的地址、控制信息及自定义信息。
基于ARM的无人车GPS导航系统的设计与实现

基于ARM的无人车GPS导航系统设计与实现
各模块之间的连接和互动关系如下:ARM微控制器作为主控单元,负责接收 GPS模块、车速传感器和方向传感器的数据,进行处理后通过串口通信将控制信 号发送给车辆控制系统。同时,微控制器还将车辆状态信息和定位信息显示在液 晶显示屏上,方便驾驶员或控制中心进行监控。
基于ARM的无人车GPS导航系统 的设计与实现
基于ARM的无人车GPS导航系统设 计与实现
基于ARM的无人车GPS导航系统设计与实现
随着科技的快速发展,无人驾驶汽车已成为人们的焦点。而GPS导航系统作为 无人驾驶汽车的重要组成部分,为车辆的精确控制和路径规划提供了基础。本次 演示将基于ARM(Advanced RISC Machines)架构,探讨无人车GPS导航系统的 设计与实现。
基本内容
同时,为了提高自主导航的可靠性和鲁棒性,可以采用滤波算法(如卡尔曼 滤波算法)对定位信息进行处理和分析,以提高定位信息的准确性和可信度。
基本内容
对于系统测试与结果验证,通常需要进行以下步骤: 1、测试场景设计:为了测试无人驾驶车GPS自主导航系统的性能,需要设计 不同的测试场景,包括城市道路、高速公路、隧道、桥梁等多种路况和环境,以 检验系统的全方位性能。
基本内容
在具体应用中,可以根据实际需求选择合适的定位技术。 2.地图构建:无人 驾驶车GPS自主导航系统需要构建高精度地图,以便于导航控制器根据地图信息 计算出车辆应该行驶的路径。地图构建主要包括地图数据的采集、处理和存储。 地图数据可以来源于现有的地图数据商,也可以通过自身采集数据进行构建。在 地图构建过程中,需要考虑实时地图更新问题,以保证地图信息的准确性和实时 性。
具体硬件设计包括电路连接和硬件模块的选型。首先,我们需要搭建一个包 括GPS模块、车速传感器、方向传感器等硬件的电路板,并使用ARM微控制器对其 进行控制。其中,GPS模块负责获取经纬度信息,车速传感器和方向传感器则分 别检测车辆的速度和方向。此外,为方便调试和程序下载,还需选用一款具有串 口通信功能的液晶显示屏。
基于ARM的嵌入式车载GPS定位系统设计
基于ARM的嵌入式车载GPS定位系统设计
0 前言
车载定位系统作为车载信息系统的重要部分,利用GPS 等装置,以一定精度实现车辆定位,包含位置、速度和行车方向等车辆姿态信息。
继一些国家之后,我国一些科研院所和高校也开始研究自己的车载定位系统,市场空前的繁荣。
但是传统系统功能单一、集成度不高。
随着ARM 处理器在全球范围的
流行,32 位的RISC 嵌入式处理器已经成为嵌入式应用和设计的主流。
同时嵌入式Linux 是一个非常好的免费的操作系统内核,具有稳定、良好的移植性、优秀的网络功能、完备的各种文件系统的支持、以及标准丰富的API 等特点。
因此,本文提供了一套具有先进性及工程实用性的车载定位系统整体解决方案,使得系统的性能、集成度和可扩展性大大提高。
1 系统的硬件设计
1.1 系统的整体硬件设计
本文车载信息系统由以下几部分组成:主控制部分、定位部分、通信部分、数据采集部分、显示部分,如图1 所示。
图1 车载定位系统总体硬件设计方案
主控制部分采用了三星公司基于ARM920T 的S3C2410 和Linux 的嵌入式系统平台,完成整个系统的控制。
其主要包括电源电路、时钟电路、复位电路、存储模块电路、JTAG 接口电路、串行口电路、LCD 接口、SPI 接口以及按键电路的设计。
主控模块通过串行口、SPI 接口、LCD 接口与扩展模块相连接构成整个硬件系统。
1.2 GPS 模块的硬件设计与制作。
基于ARM的GPS定位系统设计的开题报告

基于ARM的GPS定位系统设计的开题报告一、选题依据随着智能手机、车载电脑等智能设备的普及,GPS定位技术得到了广泛的应用。
基于ARM的GPS定位系统,是一款能够实现定位功能的智能设备,具有高效、低功耗的特点。
目前,市场上已经有不少GPS定位系统产品,但是在细节上还有很多可以改进的地方。
因此,设计一款基于ARM的GPS定位系统,无疑是具有很大的市场潜力和开发前景的。
二、研究目的本设计的目的是通过开发一款基于ARM的GPS定位系统,解决市场上已有产品在使用过程中存在的不足之处,从而提高GPS定位系统的性能、实用性和稳定性。
三、研究内容(1)GPS定位技术的原理与应用。
研究GPS定位技术的基本原理,了解GPS定位技术在实际应用中的操作流程。
(2)ARM处理器的原理与应用。
研究ARM处理器的架构,了解ARM处理器在各种应用中的优势和局限性。
(3)GPS定位系统的硬件设计。
设计GPS定位系统的硬件部分,包括GPS接收器、ARM处理器、存储器、显示器等。
(4)GPS定位系统的软件设计。
设计GPS定位系统的软件部分,包括GPS定位算法、数据存储与处理、图形界面等。
(5)GPS定位系统的测试与实验。
对设计的GPS定位系统进行测试和实验,验证其性能和稳定性。
四、研究意义(1)基于ARM的GPS定位系统将能够满足人们对定位功能的需求,提高其实用性和便捷性,实现更精准的定位。
(2)本设计的研究结果能够为现有的GPS定位系统技术提供一个完善和优化的方案,从而使GPS定位技术在各个领域得到更广泛的应用。
(3)研究GPS定位系统,不仅为我们深入了解GPS定位技术的原理提供了一个机会,也有利于我们提升对GPS定位技术的理论研究和应用开发能力。
五、研究方法(1)文献调研法。
对GPS定位技术、ARM处理器等相关领域的基础理论和实际应用进行系统分析和综合研究。
(2)实验法。
通过搭建GPS定位系统的硬件和软件平台,对系统进行测试和实验,验证与改进设计的正确性和实用性。
基于DSP和ARM的车载组合导航计算机设计
De i n o hil n e r t d N a i a i n Co p e s d o sg fVe ce I t g a e v g to m ut r Ba e n DSP n a d ARM
GONG a— h n B ic u ,L u —a , YAN is, MA n IS i o l Ka—i Ro g
s se b s d o P a d ARM s d s n d T e s se a o td DS s n v g t n c mp tr t o lt y tm a e n DS n wa e i e . h y tm d p e P a a ia i o u e o c mp ee g o rp d f s n a d c lu a in o a ia in d t . a i u i n a c l t fn v g t a a ARM P o l td t e s se l v l o t la d t e a q i — o o o C U c mp ee h y tm— e n r n h c u s e c o i t n o S a d i g n o ma in ec C L o l td s me d c d n , o t la d t e a q i t n o t e i fGP n ma e i f r t t . P D c mp ee o e o i g c n r n h c u s i f oh r o o o io
基于ARM的GPS定位系统的设计与实现
11
2.3 本章总结 ........................................................................................................... 13
12 第三章 嵌入式系统设计
13
3.1 软件平台搭建 .................................................................................................... 15
18
3.2.1 Linux 驱动程序开发流程..........................................................................25
19
3.2.2 驱动程序设计........................................................................................... 27
33 data dealer deal with the received location information , to achieve the purpose of positioning
34 the object distance .
35
GPS positioning system based on ARM bulit up the data receiver and a data dealer. The
6 好的社会效益、经济效益。
7
基于 ARM 的 GSP 定位系统,将其数据接收装置安装在待跟踪的物体上,数据接收
SINS组合导航系统设计的开题报告

基于ARM的GPS/SINS组合导航系统设计的开题报告一、研究背景GPS(Global Positioning System)和SINS(Strapdown Inertial Navigation System)是常用的导航系统。
GPS定位准确度高,但存在遮挡、干扰等问题;SINS具有短时间内无需外部信息就能获得高精度位置信息的优势,但误差会随着时间累积。
因此,将GPS和SINS合并的组合导航系统在实际应用中得到广泛的应用。
二、研究内容本课题主要研究基于ARM芯片的GPS/SINS组合导航系统的设计。
具体内容包括:1. 对GPS和SINS的原理和特点进行研究,分析其优缺点。
2. 设计GPS模块和SINS模块,并进行硬件接口设计。
3. 开发基于ARM芯片的控制模块软件,实现数据采集、融合和输出功能。
4. 在实验室内进行系统测试,并对实验结果进行分析。
5. 对系统进行优化,提高精度和鲁棒性。
三、研究意义本课题的研究将对导航系统的应用和发展具有重要意义,特别是对于航空、航天、智能交通等领域的应用有着重要的推动作用。
四、预期成果本课题的预期成果包括:1. 基于ARM芯片的GPS/SINS组合导航系统软硬件设计方案。
2. 导航系统测试数据及分析报告。
3. 按照实验结果对导航系统进行进一步优化和改进,提高高精度和鲁棒性能。
五、研究方法本课题主要采用理论研究和实验研究相结合的方式进行。
首先对GPS和SINS的原理和特点进行深入的理论研究,然后进行模块设计和硬件接口设计。
随后,开发基于ARM芯片的控制模块软件,并在实验室内进行系统测试。
最后,对实验结果进行分析和优化。
六、研究计划本课题的研究计划如下:第1-2个月:对GPS和SINS的原理和特点进行深入研究。
第3-4个月:模块设计和硬件接口设计。
第5-7个月:控制模块软件开发,进行实验室测试和数据采集。
第8个月:实验数据处理和分析,提出优化方案。
第9-11个月:对系统进行进一步优化和改进,提高精度和鲁棒性。
基于DSP的GPSDR组合定位系统的设计

基于DSP的GPSDR组合定位系统的设计
基于DSP的GPS/DR组合定位系统的设计
对于城市车辆GPS导航来说,其很大的一个缺点是跟踪卫星的信号常常由于建筑物、隧道及树木等的遮挡而使GPS的定位精度大大降低,甚至无法进行正常的定位.为此,提出了基于DSP的GPS/DR组合定位系统,详细介绍了系统的硬件设计方法、组成和软件设计思想.最后进行了采用联合卡尔曼滤波器的GPS和DR系统的组合定位的仿真实验.实验证明,采用联合卡尔曼滤波算法的GPS/DR组合定位系统的转度明显高于GPS单独定位方式.
作者:李宇曹洁任崇玉 LI Yu CAO Jie REN Chong-yu 作者单位:兰州理工大学,电气工程与信息学院,兰州,730050 刊名:科学技术与工程ISTIC英文刊名:SCIENCE TECHNOLOGY AND ENGINEERING 年,卷(期):2007 7(21) 分类号:P228.4 关键词:全球定位系统航位推算 DSP 组合定位系统联合卡尔曼滤波。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12 汽车 减 震 系统 的数 学 模 型 .
汽车减震系统可通过 _阶线性常系数微分方 进行建模 , 一 简
易汽 车 减 震 系 统足 巾 ‘ 弹 簧 和 个 忡 减 震 器 所 组成 。 个 信 号 x( 足 作 在质 量 m 1的外 部 力, yt 是 从 平 衔 点 处 的 .1 ) () 水 平偏 移 , 在 衡 处 该 弹 簧 末诎 加 任 f 恢 复 。 整 个 仿真 过 不 I l I J 计 重 J 影 响 。恢 乃 南 F 给 …
维普资讯
仪器仪表用户
迷 的 小 煌 变化 , 这 就相 应 岛频 分 量 : 瞍 . 在 下 f 驶 过 中 ,地 形 的坡 艘 内 部分 是 整 个地 肜 的 坡 个缓 慢 的 高艘 变 化 , 这
科研设计成果
22c 1 , = . 0 < O情况下汽车减震 系统 时域 、频域 仿真 = 0
d ytd () t / + d () t y t x t yt d+ / f) = ( ) () 4
3 结 束 语
MAT AB软 件足 目前 比较 流行 的 ‘ L 种软 件,特 别在 数值训 算、信 号处理方面尼为突; 。利用先进的 计算机软件环境,n对实 t i J 际系统 时域、频 域特 性进行仿真 ,再对仿 真结果进行 分析、处理. 这对我们学习理论知 识并学会应刚非常仃利。@
择 两 纠 小叫的 多数进 行仿 真。 .
f】Smo a knSg a n y t . fi_ i 版社, 20 . 2 i n H y i,i l a d S s ms 电 n s e E k= ql 3 03
f1Aln V. p n em,in l a d S se 3 a Op e h i Sg as n ytms 电 l ̄ H版 礼. 20 . /k i l 03
利川 MATL AB进行仿真结果见 罔 4和 罔 5。 论从时域波形还是频域波形来看 ,汽车颠簸的太厉 害,这就 是 为什么没有任何旅客或驾驶 喜欢这个 < o 相 当 减震器 性 =( 为 O 无作用 )的值 。 ,
苦 口 p p p ^ 隔 喻 酋
就相应 J低频分量。减趱系统f作 J就 是耍在汽 午的行驶过程中减 ‘ 内 _ } = l 小路丽_半所 l j起的波动 ,因此 ,找们可 以将减 震系统看成是 一 个 低通滤波器。在汽午减震系统 中,当汽午的J 龠质量 m …定时,滤 芪l 波器的截 频率口通过弹簧系统的参数 k米选 择,而阶跃响应 中的 振荡 呵通过减 震器的 参数 u米 凋整。
I】粱虹 , 号与系统 分析肚 MA L B实现 .I :电 f l d版 4 信 T A E 京 业 {
社 , 20 02
I l张志涌 等 . 5 精通 MAT A 53 L B 版本 , 北京:北 京航 航天 夫 …
版 . 20 . 0 0
I J 6I OHN R.UCK 著 . 刘 树 棠 洋 . Co ue Ex lrt n i B mp tr po ai s n o Sin l g as An y tms d S se 奠交通 大 学 }版 柑 . 2 0 . “ 00
对f 』 _ } 道路路而 半 引起的高频起伙进行阻尼.并 可提供 个平 _ }
稳 的 驾驶
2 利用 Malb对汽车减震 系统进行仿真 t a
设 减震系统叫,我们既希望 系统的频域特性满足要求 ,又希 系统的州域特 0 尚 要求 ,I 这两力而的要求彳 行是矛 的。囚 l 1 j 1 此,在系统的设 分析 ・ .将时域特‘  ̄ 频域特 联系越来并进行 I u q - 综合 狮 q 仆什 是很何 必砭的。为晌 『 真过 .令 r=l。我 t 一 匕 f l 们选 择 个… 竹多数 ( < 会 剑 f』 真 结果.下面我们选 D1罗伯特 . 斯特 拉母著 . 刘树棠译 . 现代线性系统一 使用 MA L B T A .
两 安 交 通 大 学 出版 社 , 2 0 02
j f }: f j 乃无I 尼 门然锄率 . <称为I  ̄ 称 5 } j q 比。由此 刊见, UP 午减震 系统的t域特’ f 频域特性¨ 多数 o 、 <决定。所 以汽 i , J I A + -  ̄ I l J .和 车 减 震 系统 作 为 个 『通 滤 波 器 怍 在 xf 相 当 -外 力 )上 , 它 【 c () (
分 : d y t d ’ ( / d () t ( /1y t= k m) () ( / t u m) y t d + k 1) () ( / x t ) + / 1
盘4 时域仿真结祟 图5牺域仿真结 果
(j 3
令 【、km 利 < / kn, 1 ℃ r写 为 n= / =v2 i 则 就 1 』 J
21 . ∽=1 , = .0 0 < 07 7情 况下汽车减震系统时域 、频域仿真
此 叫 系统 【 仍真 结果 分 则 阁 2.图 3。 i O
驾 久 喜炊这 个 ( 077佰. l 它在叫域产牛 个快速 = .0 的阶跃【应 稍微仃 超 遍. 尘1 川寻咖啡溢 .且频域满 I H Ij
FI k =一 y () 1
图2 时域仿真结粜
卿 ■m ■ 栅 壕 - 忡 1 q
圈3 频域仿真结粜
I破 减 震 器 所 讯 加 的 乃巾 F = Vd /t f U 一 yd 给 。
中 参数 k是 弹
簧的忡一 系数. v恐减震 器 心的心龟。将什用到 L减 震器相连的 j 质 量 ㈨ 相 加 川 x() xt 代 许 外 部 力, 可得 到 下 列 阶 微 . =k () t