RV MDK4的使用
MDK4.0使用J-Link方法

MDK4.0使用J-Link方法
最近使用MDK4.0 和J-Link 学习一下STM32 系统的CPU,早在两年前的时候,写过STM32 的程序,也画过线路板,但是时间太长了那都是在原来公
司做的,导致很多东西都忘记了,最近准备捡起来温习一下,之前仿真STM32 的时候使用的是U-Link,现在只有J-Link,安装MDK4.0 后居然没有发现J- Linke 的选项,按照网上的方法找到了,也出现了,但是居然使用起来不太好用。
最后经过了N 多复杂的过程我发把它弄好用,其实简单总结起来就是三步:这里的添加方法都是按照网上说的方法,所以不尽相同,这个方法不用质疑。
配置完Tools.ini 文件后,你打开软件后,你就可以发现出现了J-Link 选项,然后点击Utilities 选项卡,出现下面界面然后进行配置。
这里你需要选择的是
STM32F10x Med-density Flash,这个选型,之前安装的时候没有找到这个,仿真起来的时候总是出现错误,我不知道是什么原因,起初也会出现N 多问题,
我又安装了MDK320 然后在安装了MDK4.0 这样就出现了这个选项,我估计是我软件安装的问题才会导致这样吧。
不管怎么样,经过很大的周折才把它弄出来,起初以为很简单呢,原来我低估它的实力了,前天才把它搞定~~tips:感
谢大家的阅读,本文由我司收集整编。
仅供参阅!。
Keil μVision4 集成开发环境入门

图 A-6 Keil μVision4 集成开发环境界面 这里可以看到,Keil μVision4 集成开发环境具有典型的 Windows 界面风格。整个编 程界面主要包括菜单栏、工具栏、项目管理区、源代码工作区和输出信息窗口。另外,还有 一些功能窗口将在后面逐步介绍。下面我们将带领读者逐一认识 Keil μVision4 集成开发 环境的主要组成部分。
BL51 连接器/定位器利用从库中提取的目标模块和由编译器或汇编器生成的目标模块 创建一个绝对地址的目标模块。一个绝对地址目标模块或文件包含不可重定位的代码和数据。 所有的代码和数据被安置在固定的存储器单元中。
此绝对地址目标文件可以用来: 写入 EPROM 或其他存储器件。 通过μVision4 调试器来模拟和调试。 通过仿真器来测试程序。 4.OH51 目标文件转换器 OH51 目标文件转换器可以把前面编译连接好的目标文件转换成能写入 EPROM 中的 HEX 文件。 5. μVision4 调试器 μVision4 源代码级调试器是一个理想的快速、可靠的程序调试器。此调试器包含一个 高速模拟器,能够模拟整个 8051 系统,包括片上外围器件和外部硬件。当从器件库中选择 器件时,这个器件的特性将自动配置。 μVision4 调试器为在实际目标板上测试程序提供了以下 2 种方法: 安装 MON51 目标监控器到目标系统并且通过 Monitor-51 接口下载程序; 利用高级的 GDI(AGDI)接口,把μVision4 调试器绑定到目标系统。 6.Monitor-51 μVision4 调试器支持用 Monitor-51 进行目标板调试。此监控程序驻留在目标板的存 储器里,它利用串口和μVision4 调试器进行通信。利用 Monitor-51,μVision4 调试器可 以对目标硬件实行源代码级的调试。 7.RTX-51 实时操作系统 RTX-51 实时操作系统是一个针对 8051 系统的多任务核。RTX-51 实时内核从本质上简化 了对实时事件反应速度要求高的复杂应用系统的设计、编程和调试。RTX-51 实时内核是完 全集成到 C51 编译器中的,从而方便使用。任务描述表和操作系统的连接由 BL51 连接器/ 定位器自动控制。
RealviewMDK4.0进行2440开发快速入门

Realview MDK4.0 进行2440开发快速入门----苑臣芒(光芒)RealView MDK在中国推出已经有一段时间了,而且作为未来发展的趋势必将取代ADS1.2,成为工程师广泛应用的开发平台。
但是好多工程师还习惯于用ads环境来调试,编译,我以前也是,但毕竟ads软件已经没有技术支持了,这势必会在以后对开发工作有一定影响,ARM将Keil公司收购之后,正式推出了针对ARM微控制器的开发工具RealView Microcontroller Development Kit (简称RealView MDK 或者MDK),它将ARM开发工具RealView Development Suite(简称RVDS)的编译器RVCT与Keil的工程管理、调试仿真工具集成在一起,是一款非常强大的ARM微控制器开发工具。
所以将ads工程转成rvmdk工程势必会成为开发道路上的难题。
第一步:分析一下ads工程及环境。
这是我的工程文件,看一下ads的设置,首先是target setting选项,选择arm from elf接下来编译器选项总平台都选择arm920t,其余不需要修改。
如图其余几个编译器(c,c++)也相应都设置为arm920t,其他地方不需要动。
接下来就是关键的link选项了,最关键的是ro,这个是程序运行地址,也就是在ram的哪个地址运行,tq2440和mini2440都可以设置为0x30000000,也可以比这个数值稍微大些,看实际需要吧,我们设置为0x30000000.在option标签页中添加程序入口点,这个入口点就是主程序运行的第一条指令的地方,在2440init.s中可以找到是entry,所以这里填写“__ENTRY”接下来看lay out选项卡,设置如下:到这里,设置基本完工了,但还不能生成文件,在arm fromELF中我们选择plain binary,接可以生成与工程名字同名的bin文件了。
介绍如何使用RVMDK——keil

介绍RVMDK开发板拿到手之后,不要浪费时间,第一步就要建立一个学习平台。
一个好学习平台很重要,在不同程度上提高了我们的学习效率。
此外,养成良好的资料整理能力,让工程构造,文档资料清晰明了。
编译软件:RealView MDK-ARM 4.12,简称MDK或KEIL相信大多数读者是从51单片机那接着学过来的,对于KEIL C51的熟悉程序就不用说了。
刚接触新的事物,找点熟悉的来增强信心很重要。
用IAR的人也不少,两者的区别不大。
在这里,我们建议你先熟悉使用MDK.调试软件:JLINK V8拥有一个调试软件来学习,效率会快很多。
除了让我们更容易地找出代码的错误之处,还能让我们越来越熟悉STM32的内部寄存器。
有ST LINK的同学用ST LINK也行。
这里我们选择SEGGER公司JLINK,理由很简单:便宜。
接着我们用MDK来构建一个工程,貌似一些新手会觉得麻烦。
在后面的程序中,我们将一直沿用这种结构的工程,但不必每次都经历繁琐的建立过程。
在你想要的位置建立以下文件夹:Code(文件夹)Libraries(文件夹)-CMSIS(文件夹)-STM32F10x_StdPeriph_Driver(文件夹)Obj(文件夹)Utilities(文件夹)-Common-STM3Fire_Bull打开MDK, New Vision Project, 选择工程模板文件夹中,输入Project,CPU的选型STMicroelectronics—>STM32F103VC(按实际芯片类型来选,你不是这个就选别的)接着会弹出如下对话框:启动代码是一段和硬件相关的汇编代码.是必不可少的!这代码具体如何工作的,这个我们不必太关心,感兴趣的朋友可以去研究下。
在弹出的选择是否添加启动代码的窗口,我们选否,因为我们在后面会选择使用ST官方提供的启动代码。
启动代码是根据芯片类型来决定的,工程里包含了两个启动代码的话,编译会出事。
Keil uVision4使用说明

K e i l u V i s i o n4使用说明一、RealView MDK 的安装步骤 0二、J-link的使用 01. 安装J-link驱动 02. JLINK仿真器在Keil uVision4下的配置与使用 0三、M3-LINK仿真器使用说明书 (1)1. 仿真器的驱动安装 (1)2. M3-LINK仿真器在Keil uVision4下的配置与使用 (1)四、芯片型号的判定: (2)五、安装流明诺瑞驱动库 (2)Keil uVision4使用说明一、RealView MDK 的安装步骤将安装文件拷贝到电脑根目录下,然后双击图标,如图所示:注意:去掉属性里的只读选项。
一直点Next,选择默认路径即可。
出现以下图标后随便输,直至安装完成。
说明:安装完成以后,必须先更新流明诺瑞驱动库才能使用软件二、J-link的使用1.安装J-link驱动第一步:找到并打开“J-LINK驱动”文件夹,双击运行可执行文件Setup_JLinkARM_V408l.exe,出现如下界面:第二步:点击Yes,后面出现的对话框一直Next即可,安装目录选择默认的路径C:盘下即可,如下图所示:第三步:安装完成后,用USB电缆把仿真器与开发板连接上后,在我的电脑设备管理器的通用串行总线控制器下能找到J-link driver。
如下图所示:右击我的电脑,依次点击管理、设备管理器、通用串行总线控制器即可查看。
安装完成后显示的驱动信息2.JLINK仿真器在Keil uVision4下的配置与使用第一步:(1)确保仿真器的驱动已经正确安装。
(2)确认开发环境Keil uVision4软件已经安装并可以使用。
第二步:进入到附带的“Keil工程\EXP-LM3S811”文件夹下,参考这个针对EXP-LM3S811板卡的工程设置进行其它工程的设置。
双击运行TIMER_SECOND.uvproj工程,出现下图所示的窗口,见下图:使用JLINK仿真器必须要进行如下的配置,左键点击上图中的红框圈中的标签,弹出如下图所示的对话框:分别进入Debug标签和Utilities标签,进行如下设置:第三步:点击上图图中红框后的Settings,检查J-LINK连接是否成功。
keil(UV4) 的注册步骤
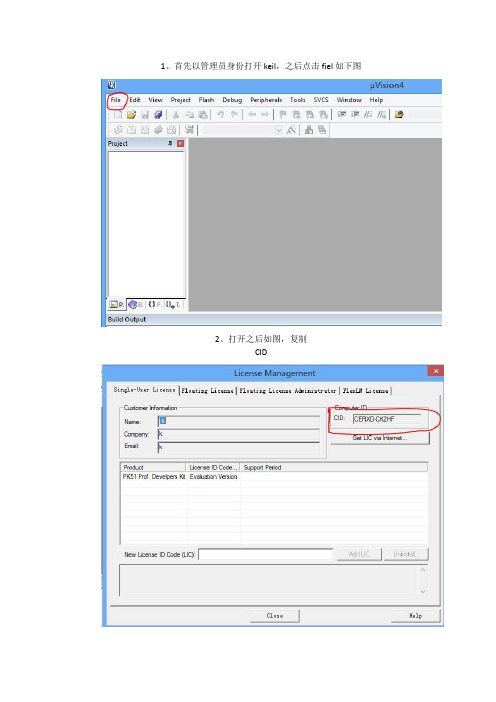
1、首先以管理员身份打开keil,之后点击fiel如下图
2、打开之后如图,复制CID
3、首先以管理员身份打开注册机,打开之后,注意你要激活的类型,是C51还是ARM还是其他
4、选择好之后,把刚才复制的CID粘贴到注册机中,然后点击Generate生成注册码
5、把注册码复制之后再粘贴到含CID的窗口中如下图1的位置中,再点击2(Add LIC),然后看一下3、和4的位置有没有出现时间限制和sucessfuly字样,如果有恭喜你,注册成功,如果没有成功多重复几次步骤4和步骤5。
keil-uvision4教程

第 4 章keil uvision4 教程本章主要内容:Keil C51的简介Keil uvision4 的安装Keil uvision4的创建应用程序本章主要从简单介绍了Keil C51,以及Keil uvision4的安装和如何在Keil中创建应用程序。
4.1 Keil C51 的简介Keil C51是美国Keil Software公司出品的51系列兼容单片机C语言软件开发系统,与汇编相比,C语言在功能上、结构性、可读性、可维护性上有明显的优势,因而易学易用。
Keil提供了包括C编译器、宏汇编、连接器、库管理和一个功能强大的仿真调试器等在内的完整开发方案,通过一个集成开发环境(卩Vision )将这些部分组合在一起。
运行Keil软件需要WIN98、NT、WIN2000、WINXP等操作系统。
如果你使用C语言编程,那么Keil几乎就是你的不二之选,即使不使用C语言而仅用汇编语言编程,其方便易用的集成环境、强大的软件仿真调试工具也会令你事半功倍。
使用汇编语言或C语言要使用编译器,以便把写好的程序编译为机器码,才能把HEX 可执行文件写入单片机内。
KEIL uVISION是众多单片机应用开发软件中最优秀的软件之一,它支持众多不同公司的MCS51架构的芯片,甚至ARM ,它集编辑,编译,仿真等于一体,它的界面和常用的微软VC++的界面相似,界面友好,易学易用,在调试程序,软件仿真方面也有很强大的功能。
因此很多开发51应用的工程师或普通的单片机爱好者,都对它十分喜欢。
2009年2月发布Keil 口Vision4 Keil 口Vision引入灵活的窗口管理系统,使开发人员能够使用多台监视器,并提供了视觉上的表面对窗口位置的完全控制的任何地方。
新的用户界面可以更好地利用屏幕空间和更有效地组织多个窗口,提供一个整洁,高效的环境来开发应用程序。
新版本支持更多最新的ARM芯片,还添加了一些其他新功能。
2011年3月ARM公司发布最新集成开发环境RealView MDK开发工具中集成了最新版本的Keil 口Vision4其编译器、调试工具实现与ARM器件的最完美匹配。
如何使用keil4

如何使⽤keil4Keil_uvision_4基本使⽤教程Keil C51 V9.00 即09年发布的最新版本uVision 4,版本外观改变⽐较⼤可以使⽤以前的注册⽂件如果全新安装,在VISTA或者WIN 7系统下,请使⽤管理员⽅式运⾏,然后注册即可⽆限制运⾏注册⽅法:1. 安装Keil C51 V9.00版本,即uV42. 打开uVision4,点击File---License Management...,打开License Management 窗⼝,复制右上⾓的CID3. 打开KEIL_Lic.exe注册机,在CID窗⼝⾥填上刚刚复制的CID,其它设置不变4. 点击Generate⽣成许可号,复制许可号5. 将许可号复制到License Management窗⼝下部的New License ID Code,点击右侧的Add LIC6. 若上⽅的Product显⽰的是PK51 Prof. Developers Kit即注册成功,Support Period为有效期,⼀般可以到30年左右,若有效期较短,可多次⽣成许可号重新注册。
使⽤汇编语⾔或C语⾔要使⽤编译器,以便把写好的程序编译为机器码,才能把HEX可执⾏⽂件写⼊单⽚机内。
KEIL uVISION是众多单⽚机应⽤开发软件中最优秀的软件之⼀,它⽀持众多不同公司的MCS51架构的芯⽚,甚⾄ARM,它集编辑,编译,仿真等于⼀体,它的界⾯和常⽤的微软VC++的界⾯相似,界⾯友好,易学易⽤,在调试程序,软件仿真⽅⾯也有很强⼤的功能。
因此很多开发51应⽤的⼯程师或普通的单⽚机爱好者,都对它⼗分喜欢。
KEIL uVision4⽐起uVision3或是uVision2界⾯感觉舒服⼀些,增加了哪些功能暂且不去研究,毕竟⼤家都喜欢⽤新的软件,感叹发展太快了,很多⼈连uVision2都没有摸透,呵呵。
安装的⽅法和普通软件差不多,这⾥就不做介绍了。
另外提醒⼤家不要崇拜汉化版软件,还是E⽂的⼲净没有BUG!在这⾥以51单⽚机并结合C程序为例(汇编操作⽅法类似,唯⼀不同的是汇编源程序⽂件名后缀为“.ASM ”),图⽂描述⼯程项⽬的创建和使⽤⽅法:⼀、⾸先我们要养成⼀个习惯:最好先建⽴⼀个空⽂件夹,把您的⼯程⽂件放到⾥⾯,以避免和其他⽂件混合,如下图笔者先创建了⼀个名为“Mytest”⽂件夹:⼆、点击桌⾯上的Keil uVision4图标,出现启动画⾯:三、点击“project --- New uVision Project”新建⼀个⼯程:四、在对话框,选择放在刚才建⽴的“Mytest”⽂件夹下,给这个⼯程取个名后保存,不需要填后缀,注意默认的⼯程后缀与uVision3及uVision2版本不同了,为uvporj:五、弹出⼀个框,在CPU类型下我们找到并选中“Atmel”下的AT89S51或52:六、以上⼯程创建完毕,接下来开始建⽴⼀个源程序⽂本:七、在下⾯空⽩区别写⼊或复制⼀个完整的C程序:⼋、输⼊源程序⽂件名名称,在这⾥笔者⽰例输⼊“test”,这个名称,同样⼤家可以随便命名。
4、MDK的介绍与使用

1.1.RVMDK简介RVMDK源自德国的KEIL公司,是RealView MDK的简称,RealView MDK集成了业内最领先的技术,包括μVision4集成开发环境与 RealView编译器。
支持ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备模拟,性能分析等功能,与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
1.2.MDK 4.12集成开发环境的组成MDK又称叫RVMDK,源自德国的KEIL公司,是RealView MDK的简称,RealView MDK 集成了业内最领先的技术,包括μVision4集成开发环境与 RealView编译器。
支持ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备模拟,性能分析等功能,与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
1.3.MDK工程的编辑1.3.1.新建RVMDK工程1)点击WINDOWS操作系统的【开始】Æ【程序】Æ【Keil uVision4】启动Keil uVision 或在桌面双击【Keil uVision4】快捷方式启动。
启动MDK4.12如图所示:2)点击之后,出现启动画面:1)点击“project---New uVision Project”新建一个工程2)在对话框,选择放在刚才建立的“新建文件夹”下,给这个工程取个名后保存,不需要填后缀:3)弹出一个框,在CPU类型下我们找到并选中“STMicroelectronics”下的STM32F103RB:4)出现一个提示框,是否复制STM32启动代码到工程文件夹,我们选择【是】,就可以看到STM32的启动代码自动添加进来了:5)到这里工程全部建立完毕1.3.2.建立文件建立一个文本文件,以便输入用户程序。
keilvu4的使用

取个工程名
3、弹出一个框,在CPU类型下我们找到并选中
“Atmel”下的AT89S52:
单击“+”号
单击“OK”
4、在弹出的对话框中单击“否”
工程文件出现在工程窗口中
二、新建源程序文件
1、新建文件。 单击“File” “New”或者单击快捷图标
这里输入程序
保存源程序文件:单击图标“ ”保存这个文件。给源程序文 件命名时,一定要加上扩展名“.C”单击“保存”。
勾选后出现“√”
三、编写调试程序
在这里输入程序
1、程序编写完成
2、编译程序
单击工具栏中的“ 下提示,说明编译成功。
”或者“
”图标在信息窗口出现如
提示
四、连接硬件线路
单片机选择“AT89S52”工作电压为4~5.5V, 电源电压5V。
单片机的Vcc、EA接电源“+5V”。 单片机的GND接电源的“GND”。 单片机P0.0-----P0.7接LED灯的负极,从右向
Keiluv4软件 的使用
先建立一个空文件夹,你的工程文件放 到里面。
双击桌面上的Keil uVision4图标,出现启动画面
一、新建工程
1、点击“project --- New uVision Project”新建一个工程:
新Байду номын сангаас工程项目
2、在对话框,选择放在刚才建立的“工程1”文件夹下, 给这个工程取个名后保存,不需要填后缀,注意默 认的工程后缀为uvporj: 单击“保存”
第3步 关闭
向工程的“源文件组”中添加文件后,左边窗口就出现刚才添加的文件。 如果没看见,可以点“+”号展开,如果没有“+”号,说明添加不成功。
MDK4.1(arm)使用手册

MDK4.1使用手册MDK4.1的安装:双击(位于软件目录下),弹出图1.1所示界面,单击Next;图1.1 MDK4.1安装弹出如图1.2所示界面,在 I agree to all terms 选项前面打钩,并单击Next;图1.2 MDK4.1安装弹出图1.3所示界面,选择安装路径,然后单击Next;图1.3 MDK4.1安装弹出图1.4所示界面,简单输入信息即可单击Next;图1.4 MDK4.1安装弹出图1.5所示界面,出现安装进度条;图1.5 MDK4.1安装安装完成之后,会弹出图1.6所示的界面,单击Finish即可完成软件的安装。
MDK4.1软件破解:打开刚才安装好的软件,选择File->License Management,复制CID号。
双击(位于软件目录下),弹出如图2.1所示界面,然后将刚才刚才复制的CID号填入,在Target选项中选择ARM,然后单击Generate,尽可能多按几下,然后复制生成的序列号。
图2.1 MDK4.1软件破解将复制得的序列号,粘贴到MDK4.1的 License Management中的New License ID Code中,然后单击Add LIC即生成如图2.2所示的结果,单击Close,至此软件破解完成。
图2.2 MDK4.1软件破解MDK4.1工程的建立:选择Project->New uVision Project,如图3.1所示,给工程命名并且选择路径;图3.1 MDK4.1建立工程弹出图3.2所示,选择所要编程的芯片,在这里以STM32F103RBT6为例;图3.2 MDK4.1建立工程选择结果如图3.3所示;图3.3 MDK4.1建立工程弹出图3.4所示的信息,单击“是”则会添加了STM32F103RBT6的启动文件;图3.4 MDK4.1建立工程此时会生成Target文件,右键单击Target弹出图3.5所示,然后选择Manage Components。
MDK4选项说明
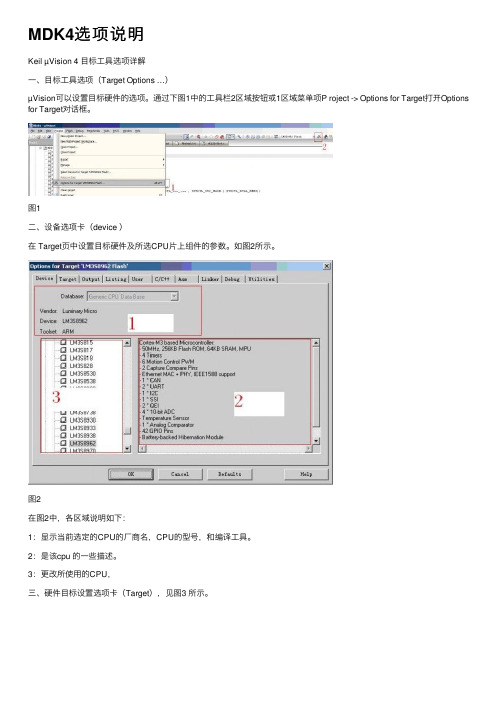
MDK4选项说明Keil µVision 4 ⽬标⼯具选项详解⼀、⽬标⼯具选项(Target Options …)µVision可以设置⽬标硬件的选项。
通过下图1中的⼯具栏2区域按钮或1区域菜单项P roject -> Options for Target打开Options for Target对话框。
图1⼆、设备选项卡(device )在 Target页中设置⽬标硬件及所选CPU⽚上组件的参数。
如图2所⽰。
图2在图2中,各区域说明如下:1:显⽰当前选定的CPU的⼚商名,CPU的型号,和编译⼯具。
2:是该cpu 的⼀些描述。
3:更改所使⽤的CPU,三、硬件⽬标设置选项卡(Target),见图3 所⽰。
图3在图3中,各区或详细说明如下:1:指定⽤晶振频率,可以⽤于模拟调试,仅反映外部振荡频率。
2:可以选择KEIL集成的实时操作系统RTX Kernel。
针对复杂的嵌⼊式应⽤,MDK内部集成了由ARM开发的实时操作系统(RTOS)内核RTX,它可以帮助⽤户解决多时序安排、任务调度、定时等⼯作。
值得⼀提的是,RTX可以⽆缝集成到MDK⼯具中,是⼀款需要授权的、⽆版税的RTOS。
RTX程序采⽤标准C语⾔编写,由RVCT编译器进⾏编译。
4:⽚外ROM设置,最多⽀持3块ROM(Flash),在Start栏输⼊起始地址,在Size栏输⼊⼤⼩。
若是有多⽚⽚外ROM,需要在7区域设置⼀个作为启动存储块,程序从该块启动;有⼏块ROM需要选中对应的3区域。
6:⽚内ROM设置。
设置⽅法同⽚外ROM,只是程序的存储区在芯⽚内集成。
9:使⽤ Cross-Module优化。
10:使⽤MicroLib库。
它旨在与需要装⼊到极少量内存中的深层嵌⼊式应⽤程序配合使⽤.这些应⽤程序不在操作系统中运⾏. MicroLib进⾏了⾼度优化以使代码变得很⼩. 它的功能⽐缺省 C 库少,并且根本不具备某些ISO C 特性. 某些库函数的运⾏速度也⽐较慢,例如,memcpy(). 与缺省 C 库之间的差异MicroLib与缺省 C 库之间的主要差异是: MicroLib不符合 ISO C 库标准. 不⽀持某些 ISO 特性, 并且其他特性具有的功能也较少. MicroLib不符合 IEEE 754 ⼆进制浮点算法标准. MicroLib进⾏了⾼度优化以使代码变得很⼩. ⽆法对区域设置进⾏配置. 缺省 C 区域设置是唯⼀可⽤的区域设置. 不能将main() 声明为使⽤参数,并且不能返回内容. 不⽀持stdio,但未缓冲的stdin,stdout 和 stderr 除外. MicroLib对 C99 函数提供有限的⽀持. MicroLib不⽀持操作系统函数. MicroLib不⽀持与位置⽆关的代码. MicroLib不提供互斥锁来防⽌⾮线程安全的代码. MicroLib不⽀持宽字符或多字节字符串. 与 stdlib 不同, MicroLib 不⽀持可选择的单或双区内存模型. MicroLib只提供双区内存模型,即单独的堆栈和堆区. 可以合理地将MicroLib与 --fpmode=std 或 --fpmode=fast 配合使⽤. MicroLib 中的函数负责: 创建⼀个可在其中执⾏ C 程序的环境. 这包括: 创建⼀个堆栈创建⼀个堆(如果需要) 初始化程序所⽤的库的部分组成内容.11:指令集中也分为⾼字节结尾,⼤端模式。
MDK使用方法

STM32入门——初识K eil MDK[嵌入式]发布时间:2011-11-09 19:49:44Keil MDK的安装与工程建立KEIL MDK开发工具源自德国Keil 公司,被全球超过10 万的嵌入式开发工程师验证和使用,是ARM公司目前最新推出的针对各种嵌入式处理器的软件开发工具。
KEIL MDK 集成了业内最领先的技术,包括µVision4集成开发环境与RealView 编译器。
支持ARM7、ARM9和最新的Cortex-M3/M1/M0 内核处理器,自动配置启动代码,集成Flash 烧写模块,强大的Simulation设备模拟,性能分析等功能,与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
KEIL MDK出众的价格优势和功能优势,已经成为ARM软件开发工具的标准,目前,KEIL MDK在国内ARM开发工具市场已经达到90%的占有率。
使用MDK前当然要先把KEIL MDK安装好。
读者首先要从/下载到最新的KEIL MDK,笔者使用的是KEIL MDK V4.13a。
下载完毕之后双击开始安装。
首先看到欢迎界面:点击Next,勾选安装协议:下一步,选择安装路径(笔者因硬盘空间不足安装在E盘,但若读者硬盘资源充裕,则建议安装在C盘,跑起来快些):下一步,填写用户信息,个人用户随意填入即可:点击Next 就进入实质的安装过程啦,Wait for a Whle… …很快安装完毕,看到 2 个可选项:1、保持当前uV ision 的设置。
2、载入以下选择的工程实例,默认即可。
点击Next,来到最后一个安装界面:1.是否安装ULINK Pro Driver V1.0驱动?2.是否显示软件发布说明?读者可以按照自己的需求勾选。
点击Finish,KEIL MDK 就完成安装了,可以发现桌面上生成了名为“Keil uVision4”的可执行文件快捷方式。
MDK编译器的使用

在ram中调试程序
设置程序下载到ram中 中 设置程序下载到
对于没有使用中断程序的程序设置在ram中调 中调 对于没有使用中断程序的程序设置在 是比较简单的: 试,是比较简单的: 1.在工程选项设置中,选择 在工程选项设置中, 目标页, 在工程选项设置中 选择target目标页,修 目标页 改IRAM1和IRAM2: 和 原先的: 原先的: 修改后: 修改后:
在工程中添加文件
编译程序
经过如上几步,我们就建立好了一个工程。我 经过如上几步,我们就建立好了一个工程。 们可以点击下图的三个编译按钮进行编译
用Jlink下载固件
Jlink介绍 介绍
J-Link是SEGGER公司为支持仿真 是 公司为支持仿真ARM内核 公司为支持仿真 内核 芯片推出的JTAG仿真器。 仿真器。 芯片推出的 仿真器 安装完J-link后,会有两个快捷图标。一个是 后 会有两个快捷图标。 安装完 J-Flash Arm图形工具,一个是 图形工具, 图形工具 一个是J-link Arm 命令行工具。 主要用于烧写固件。 命令行工具。J—Flash主要用于烧写固件。而 主要用于烧写固件 MDK自带有烧写固件的功能。所有我们主要用 自带有烧写固件的功能。 自带有烧写固件的功能 到的是J-link命令行工具 到的是 命令行工具
在ram中调试程序
启动模式
从FLASH启动:从主闪存存储器启动,主闪存存储器被映射 启动: 启动 从主闪存存储器启动, 到启动空间( ),但仍然能够在它原来的地址 到启动空间(0x0000 0000),但仍然能够在它原来的地址 ), (0x0800 0000)访问它,即闪存存储器的内容可以在这两 )访问它, 个地址区域访问; 个地址区域访问; 从系统存储器启动:系统存储器被映射到启动空间( 从系统存储器启动:系统存储器被映射到启动空间(0x0000 0000),但仍可以在原有的地址(0x1FFF F000)访问它; ),但仍可以在原有的地址 ),但仍可以在原有的地址( )访问它; 从内置的SRAM启动:只能在 启动: 从内置的 启动 只能在0x2000 0000开始的地址区 开始的地址区 访问SRAM。 访问 。
Keil_MDK4.01安装、使用说明
RealView MDK4.01安装使用指南——For Luminary Micro Stellaris系列——Use J-link仿真器北京精仪达盛科技有限公司目录第一章RealView MDK4.01集成开发环境 (3)1.1 RealView MDK简介 (3)1.2 J-LINK仿真器介绍 (3)1.3 RealView MDK4.01安装: (5)1.3.1 RealView MDK4.01 的安装步骤如下 (5)1.3.2 安装驱动库: (7)第2章安装流明诺瑞驱动库 (8)2.1 驱动库安装步骤: (8)2.2 更新驱动库 (8)第3章在RealView MDK4.01 中新建一个新项目 (10)3.1 创建工程 (10)3.2 工程管理 (14)3.3 工程基本配置 (16)3.4工程的编译链接 (21)3.5 程序烧写到FLASH (21)3.6 代码运行 (21)第一章RealView MDK4.01集成开发环境1.1 RealView MDK简介RealView MDK是ARM公司最先推出的基于微控制器的专业嵌入式开发工具。
它采用了ARM的最新技术工具RVCT,集成了享誉全球的μVision IDE,因此特别易于使用,同时具备非常高的性能。
与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
1.2 J-LINK仿真器介绍全功能版J-LINK配合IAR EWARM,ADS,KEIL,WINARM,Real View等集成开发环境支持所有ARM7/ARM9/Cortex内核芯片的仿真,通过RDI接口和各集成开发环境无缝连接,操作方便、连接方便、简单易学,是学习开发ARM最好最实用的开发工具。
最显著的特点:速度快,FLASH断点不限制数量,支持IAR、KEIL、ADS等环境。
* USB 2.0接口;* 支持任何ARM7/ARM9 核,Cortex M3 supported;* 下载速度达到600k byte/s;* DCC速度到达800k byte/s;* 与IAR Workbench可无缝集成;* 通过USB供电,无需外接电源;* JTAG最大时钟达到12M;* 自动内核识别;* 自动速度识别;* 支持自适应时钟;* 所有JTAG信号能被监控,目标板电压能被侦测;* 支持JTAG链上多个设备的调试;* 完全即插即用;* 20Pin标准JTAG连接器;* 宽目标板电压范围:1.2V-3.3V (可选适配期支持到5V);* 多核调试;* 包括软件:J-Mem,可查询可修改内存;* 包括J-Link Server (可通过TCP/IP连接到J-Link);* 可选配J-Flash,支持独立的Flash编程;* 选配RDI插件使J-Link适合任何RDI兼容的调试器如ADS、Relview和Keil等;* 选配RDI Flash BP,可以实现在RDI下,在Flash中设置无限断点;* 选配RDI Flash DLL,可以实现在RDI下的对Flash的独立编程; * 选配GDB server,可以实现在GDB环境下的调试。
MDK软件使用说明
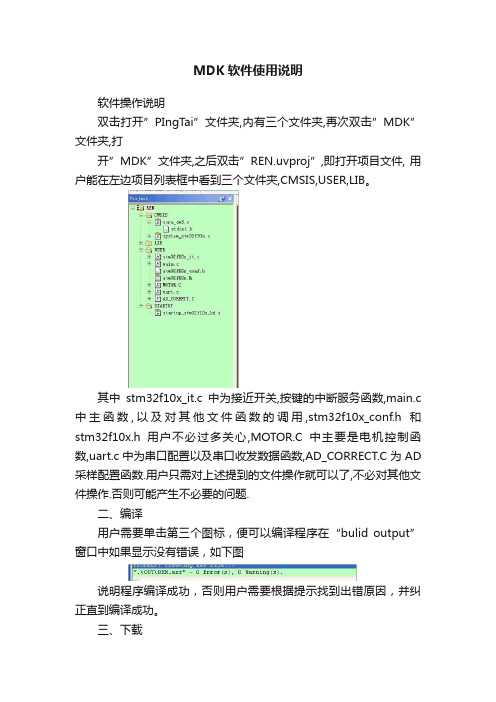
MDK软件使用说明软件操作说明双击打开”PIngTai”文件夹,内有三个文件夹,再次双击”MDK”文件夹,打开”MDK”文件夹,之后双击”REN.uvproj”,即打开项目文件, 用户能在左边项目列表框中看到三个文件夹,CMSIS,USER,LIB。
其中stm32f10x_it.c中为接近开关,按键的中断服务函数,main.c 中主函数,以及对其他文件函数的调用,stm32f10x_conf.h和stm32f10x.h用户不必过多关心,MOTOR.C中主要是电机控制函数,uart.c中为串口配置以及串口收发数据函数,AD_CORRECT.C为AD 采样配置函数.用户只需对上述提到的文件操作就可以了,不必对其他文件操作.否则可能产生不必要的问题.二、编译用户需要单击第三个图标,便可以编译程序在“bulid output”窗口中如果显示没有错误,如下图说明程序编译成功,否则用户需要根据提示找到出错原因,并纠正直到编译成功。
三、下载程序编译成功后,就可以下载程序到小车主控芯片内。
首先用户将JLINK连接到计算机的USB端口上(推荐主机后的USB端口),然后再将JLINK上的白色排线连接到主控板上的J101端口上,注意方向一致,然后打开小车旁的船型开关,会看到小车内部有红色的上电指示灯被点亮。
然后点击下图中1指示按钮,之后系统自动打开窗口,用户点击上图中2指示按钮“setting”后,系统自动打开窗口如下图所示,如在JTAG Device Chain窗口中看到如图所示,表示JLINK和主控板连接正常,就可以下载程序。
否则检查小车内各处电压是否正常。
用户可以点击下图3所指按钮,程序即开始下载完成之后,在“bulid output”窗口中能看到如下图所示表示程序已经正确下载到主控芯片中了,用户可以关闭小车电源,之后拔掉JLINK,然后再次给小车上电。
按下白色线连接的按键,小车即前进停止后退各状态间切换。
灰色线的按键是减小音量,紫色线的按键是加大音量。
教你如何使用KEIL4注册机破解32K仿真限制

教你如何用keil uvision4注册机破解32k的限制成为真正的实用版------EDIT BY JOYTAN我最近从keil 的官方网站上下了最新的keil uvision4.12版本,刚刚入门STM32,没有理会那么多,装起来了就使用。
由于编辑的工程不是很大,结果在在线调试时会弹出一个提示这么一个对话框,提示只能限制32k的程序代码的仿真调试。
原先编写的代码不多,就没有在意,但是当我移植UC/ OS 后情况就不同了,每次编译就提示“*****s ize of this image (41532 bytes) exceeds the maxim*****”编译通不过,原来这是我一直使用的是keil4的试用版是缘故。
那么如何破解成为真正的实用版呢?接下来,我就将我的破解步骤一一介绍如下:第一步:安装从keil 的官方网站上下了最新的keil uvision4.12版本,或是百度下载keiluvision4.12/4.0版本.这里我给个链接:第二步:下载keil uvision4.12 的注册机,当然至2010年8月27日,我还没有看见这种注册机,但是还好,keil uvision4.0的注册机同样适用,这是我亲自测试过的。
至于下载地址,为了广大网友方便,我就以附件形式上传了。
我用的是eset nod32 杀毒软件,当我解压时会提示是病毒出错,所以建议把杀毒软件关闭后再解压安装。
第三步:解压好注册机,并配置好。
双击进入破解界面:第四步:打开keil uvision4.12进入工程界面,获取CID号码。
点击“File”下选择“license management ”进入账户管理界面:复制CID号码,我的是“CCLCV-D3INY“。
第五步:复制CID号码到注册机的CID.选择“TAGET“为ARM这样就配置为:点击“Generate”按钮,生成LIC代码如下:复制LIC代码。
第六步:将复制好的LIC代码“EXJEV-PEFDY-H8AFS-LG7JR-4AUNS-JJDYQ”填入Keil 4 license management 管理界面填入这里:点击“ADD 提示为:那么恭喜你,破解成功了。
keil4使用方法入门——基于ARM9的程序

首先创建一个空文件夹来存在工程(Keil不会为我们创建工程文件夹)。
Open keil > project > new uVision Project > 输入工程名称> SAVE在建立的文件夹里新建一个文本文件,格式修改为.s在project窗口中右击Source Group1,选择Add files to source group 1,在弹出的窗口中选中刚才建立的.s文件,然后点击ADD,再点击close弹出的窗口。
可以看到project窗口出现了我们添加的.s文件。
Flash > configure flash tools….,弹出如图Device选项里可选择要仿真的处理器,我们选择ARM9 (little end)小端。
Target选项里可设置ROM/RAM起始地址,这里的起始地址要跟Linker选项里的地址一致。
CODE Generation设置成ARM-mode接下来在.s文件里编写我们的ARM汇编,如下。
;在ARM状态下生成由64个整数构成的数组的初始值。
;在THUMB状态下将上述数组复制到一个新的地址,并转换成字符数组;再返回ARM状态,计算Thumb状态下所产生数组所有元素值的和。
AREA block, CODE, READONLYN EQU 64FIR EQU 0x01ENTRYstart;送数组入口地址LDR R0, =AMOV R3, #N-1 ;init counterLDR R4, =FIR ;init the first number of A arrayinit64 ;produce 64 numbers; CMP R3, #0; BEQ init_finhSTR R4, [R0], #4ADD R4, R4, #1 ;SUBS R3, R3, #1 ;递减BPL init64 ;循环;init_finhLDR R0, =ALDR R1, =BMOV R3, #N*4-1 ;init counterADRL R7, change+1BX R7 ;处理机状态切换为THUMB CODE16;复制转换change; CMP R3, #0; BEQ change_finhLDRB R2, [R0] ;读取字节; ADD R2, #65 ;转换为字符STRB R2, [R1]ADD R0, #1ADD R1, #1SUBS R3, #1BPL change;change_finhLDR R1, =BMOV R3, #N*4-1ADR R7, sum ;状态切换BX R7CODE32sumLDRB R0, [R1], #1 ;计算和,结果保存在R0中sum_loop; CMP R3, #0; BEQ sum_finhLDRB R2, [R1], #1ADD R0, R0, R2SUBS R3, R3, #1BPL sum_loop;sum_finhloopupB loopupAREA datablock, DATA, READWRITEA SPACE 64*4B SPACE 64*4END保存文件夹,然后build 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信息 学院
只读段 READONLY
Embedded Driver Design
RV MDK基本应用
建立源文件
点击FileSave as,保存源文件:
汇编保存为IsetSrc.s文件; C语言保存为IsetSrc.c文件。
信息 学院
Embedded Driver Design
RV MDK基本应用
RV MDK简介
RV MDK界面
信息 学院
Embedded Driver Design
RV MDK简介
RV MDK界面
信息 学院
Embedded Driver Design
RV MDK简介
RV MDK界面
信息 学院
Embedded Driver Design
RV MDK简介
开发过程
信息 学院
以上工程创建完毕。
Embedded Driver Design
RV MDK基本应用
汇编伪指令简介
(1)ENTRY
信息 学院
ENTRY 伪指令用于指定汇编程序的入口点。在一个完成的 汇编程序中至少要有一个ENTRY,但在一个源文件里最多只能 有一个ENTRY(也可以没有)。
(2)AREA
建立源文件
需要把创建的源文件加入到工程项目文件中,
信息 学院
双击Source Group或右击Source GroupAdd Files
Embedded Driver Design
RV MDK基本应用
建立源文件
需要把创建的源文件加入到工程项目文件中,
弹出添加源文件对话框:
信息 学院
RV MDK基本应用
建立工程
点击:ProjectNew uVision Project
信息 学院
显示:
Embedded Driver Design
RV MDK基本应用
建立工程
信息 学院
选择为本工程建立的“Mytest”文件夹,给工程取 个名、保存,自动保存为.uvporj文件。 在 弹 出 的 对 话 框 中 , 在 CPU 类 型 下 找 到 并 选 中 “ARM”下的ARM7 Little Ending,点击Ok:
Embedded Driver Design
RV MDK简介
系统启动
µVision4在µVision3的基础上增加了:
信息 学院
扩展了Device Simulation(设备仿真)功能以支持许多新 设备,如 Luminary 、 NXP 和东芝生产的基于 ARM CortexM3 处理器的 MCU ; Atmel SAM7/9 ;及新的 8051 衍生品,如 Infineon XC88x和SiLABS 8051Fxx。 支持许多 debug adapter interfaces( 调试适配器接口 ) ,包括 ADI miDAS Link 、 Atmel SAM-ICE 、 Infineon DAS和ST-Link。
RV MDK的使用
本课程的主要内容
主要内容
RV MDK的使用
信息 学院
Embedded Driver Design
RV MDK简介
系统启动
信息 学院
ARM发布Keil™ µVision®4集成开发环境(IDE), 用来在微控制器和智能卡设备上创建、仿真和调试嵌 入式应用。 µVision4 IDE 是为增强开发人员的工作效率设计 的,有了它可以更快速、更高效地开发和检验程序。 通过 μVision4 IDE 中引入的灵活的窗口管理系统, 开发人员可以使用多台监视器,在可视界面任何地方 全面控制窗口放置。新用户界面可以更好地利用屏幕 空间,更有效地组织多个窗口,为开发应用提供整齐 高效的环境。
选择文件点击“ADD”添加后,对话框不会消失,需要点击 “Close”。
Embedded Driver Design
RV MDK基本应用
环境设置
点击Project Options for ...弹出
信息 学院
Embedded Driver Design
RV MDK基本应用
环境设置
Utilities used with various examples.
Embedded Driver Design
RV MDK简介
图标说明
信息 学院
Embedded Driver Design
RV MDK简介
图标说明
信息 学院
Embedded Driver Design
RV MDK简介
信息 学院
Embedded Driver Design
RV MDK基本应用
环境设置
Listing 如图所示。
信息 学院
Embedded Driver Design
RV MDK基本应用
环境设置
User 如图所示。
信息 学院
Embedded Driver Design
RV MDK基本应用
伪指令
LDR R0, =0x56000054 ;“LDR =”构成伪指令,为Rd设置32位立即数 NOP
Embedded Driver Design
RV MDK基本应用
建立源文件
程序结构
信息 学院
;****************************************************** ;符号说明: ;#&表示十六进制立即数:#&0F ;#0x表示十六进制立即数:#0xf0 ;#%表示二进制立即数:#%1010 ;#n_表示(n=2,...9)进制的立即数:#2_1010 ;-----------------------------------------------------;指令格式: ;<opcode>{<cond>}{S} Rd, Rn, {<operand2.>} ;-----------------------------------------------------;功能说明: ;介绍7种寻址方式 ;-----------------------------------------------------Embedded Driver Design
Embedded Driver Design
RV MDK简介
系统启动
信息 学院
首先要养成一个习惯:最好先建立一个空文件夹, 把您的工程文件放到里面,以避免和其他文件混合, 如“Mytest”文件夹。 点击桌面上的Keil uVision4图标,启动。
Embedded Driver Design
Embedded Driver Design
RV MDK简介
文件目录
Folder C:\KEIL\ARM\BINxx C:\KEIL\ARM\Boards C:\KEIL\ARM\Examples Contents
Executable files of the µVision4/ARM tool chain.
Embedded Driver Design
RV MDK简介
系统启动
µVision4在µVision3的基础上增加了:
信息 学院
System Viewer ( 系统查看程序 ) 窗口,提供了设备外围 寄存器信息,这些信息可以在System Viewer窗口内部直接 更改。 Debug Restore Views (调试恢复视图)允许保存多个窗 口布局,为程序分析迅速选择最适合的调试视图。 Multi-Project Workspace( 多项目工作空间 ) 为处理多 个并存项目提供了简化的方法,如引导加载程序和应用程序。 为 基 于 ARM® Cortex™ 处 理 器 的 MCU 提 供 了 Data and instruction trace(数据和指令追踪)功能。
信息 学院
Board specific example programs.
Generic Example programs. Flash programming algorithm files for the Keil ULINK USB-JTAG Adapter. On-Line documentation for µVision4 and the Keil ARM toolchain. C/C++ include files and device specific compiler include files. RL-ARM Real-Time Library components. Examples and setup files for the Real-Time Agent.
C:\KEIL\ARM\Flash
C:\KEIL\ARM\HLP C:\KEIL\ARM\INC C:\KEIL\ARM\RV31 C:\KEIL\ARM\RL C:\KEIL\ARM\RT Agent
C:\KEIL\ARM\Startup
C:\KEIL\ARM\Utilities
Device specific microcontroller startup files.
Device 已经设置。 可以更改。
信息 学院
Embedded Driver Design
RV MDK基本应用
环境设置
Target ROM:片外。 RAM:片外。 大小自定。 其它: 如图所示。
信息 学院
Embedded Driver Design
RV MDK基本应用
环境设置
Output 如图所示。
RV MDK基本应用
汇编伪指令简介
(3)EQU
信息 学院
EQU伪指令用于为程序中的常量,标号等定义一个等效的字 符名称,类似于 C 语言中的 #define 。其中 EQU 可用“ * ”代 替。 语法格式:名称 EQU 表达式{,类型}