Performance metric for vision based robot localization
代表性学术论文及被引用情况

项目代表性学术论文及被引用情况本项目精选出5篇代表性论学术论文,列示如下:[1]Nihong Chen, Peng Cai,Tiangang Zhou, Benjamin Thompson, Fang Fang.Perceptual Learning Modifies the Functional Specializations of Visual Cortical Areas. Proceedings of the National Academy of Sciences, 2016, 113(20): 5724-5729. (Google Scholar他引2次) (课题一)[2]Zhiwu Huang, Ruiping Wang, Shiguang Shan, Xilin Chen. Projection MetricLearning on Grassmann Manifold with Application to Video based Face Recognition. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 140-149, 2015. (Google Scholar他引22次).(课题二)[3]Xinmei Tian, Zhe Dong, Kuiyuan Yang, Tao Mei. Query-dependent aestheticmodel with deep learning for photo quality assessment. IEEE Transactions on Multimedia, 17(11): 2035-2048, 2015.(Google Scholar他引1次).(课题三)[4]Xianming Liu, Xiaolin Wu, Jiantao Zhou, Debin Zhao. Data-driven sparsity-basedrestoration of jpeg-compressed images in dual transform-pixel domain.Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 5171-5178, 2015. (Google Scholar他引8次).(课题四)[5]Jian Zhang, Ruiqin Xiong, Chen Zhao, Yongbing Zhang, Siwei Ma, Wen Gao.CONCOLOR: Constrained Non-Convex Low-Rank Model for Image Deblocking.IEEE Transactions on Image Processing, 25(3): 1246-1259. (Google Scholar他引2次).(课题五)附:论文全文及典型引用和评价课题1典型引文1)加州大学洛杉矶分校教授 Zili Liu在其发表于 Brain Simulation 2016上的关于视觉运动感知的文章中(见附件,典型引文1)指出:“Effects of V1 and V5 TMS on the performance of visual tasks have been reported using both online and offline stimulation protocols, .g. Refs. [21–28].”第一篇论文的作者承认本论文中使用的TMS实验方法的正确性以及有效性,并在他们的工作中借鉴了本论文中使用的方法。
自动化质量控制解决方案商品说明书

NewsConsumer behavior is changing. The trend for greater product diversity, proliferation of package sizes and the desire for healthier beverages are putting additional pressure on manufacturers. Automated quality control solutions offer the flexibility to handle product variability without reducing efficiency or safety.Increased Beverage ProductivityConsumers Demand Variety and Clear Labellingrectly labeled products could lead to con-sumer dissatisfaction, the loss of goodwill and the possibility of an expensive prod-uct recall to rectify problems. The use of vision inspection technology ensures that every label on every product is checked for correctness, quality, position and that the correct barcodes, lot numbers and expiry dates are included.Smaller sizesDrink containers are shrinking as con-sumers reach for more convenient and ef-ficient packaging suited to a more active lifestyle. P ackages sized to serve one or two people have become a big trend and present an opportunity for increased prof-itability for manufacturers. Smaller pack-ages can frequently be handled at higherStanding out from the competition in an increasingly saturated industry is a chal-lenge for beverage manufacturers of all sizes. The need to keep up with rapidly changing consumer demands intensi-fies that challenge. Recent research from PMMI, the Association for Packaging and P rocessing Technologies, predicts some interesting and demanding trends for the current year.Health and transparencyConsumers are moving towards health-ier beverages. Clear and accurate label-ing is essential to communicate product benefits to the consumer. But frequent product change-overs in bottling plants to meet market demands can increase the risk of mislabeling or label mix-up. Incor-Industrial Weighing & Product InspectionBeverages212METTLER TOLEDO Beverages News 21A u t o m a t e d Q u a l i t y C o n t r o lP rotecting the welfare of consumers is paramount for manufacturers and the use of x-ray inspection to detect physi-cal contaminants is seen as essential by many manufacturers. X-ray can also be used to check closures and fill levels, even in opaque containers.Vision and x-ray inspection systems are able to perform a wide variety of qual-ity and integrity checks to support the beverage industry in meeting market de-mands of the future. METTLER TOLEDO is able to provide advice in choosing the optimum technology for each application.❝ /pi-bespeeds providing opportunities for in-creased throughput and enhanced processefficiency. The advent of higher-speed processing has meant that traditional hu-man-eye inspection is impossible. Vision technology has evolved and can handle inspection at very high speeds.Increase in PET bottles P ET bottles still rank among the most successful consumer packaging formats, and they continue to be a primary solu-tion for fast-growing beverage products. Demands for improved sustainability, re-duced product weight and attractive ap-pearance are helping to drive usage. As-suring the quality of bottles is important. The bottle neck and screw thread need to be correctly formed and caps must be checked to ensure seal integrity. These are further functions that vision inspec-tion can perform.Continued use of glassGlass continues to be widely used. The previously mentioned issue of increased speed can also lead to an increased risk of contamination, particularly from glass fragments which may occur during han-dling and filling.Publisher / Production Mettler-Toledo GmbH Industrial Division Heuwinkelstrasse CH-8606 Nänikon SwitzerlandSubject to technical changes © 09/2017 Mettler-Toledo GmbHHigh-speed inspection with x-ray technology identifies all manner of physical contaminants.❝ /safeline-xray-beX-ray Detects ContaminantsNew Industrial Weighing CatalogFind Your Required Solutionwith Our Full Product Portfolio ❝ /ind-catalog-be3METTLER TOLEDO Beverages News 21Batching that Growes with Your Business Better Manual and Automated ControlDeciding whether to switch from manual to automated batching can be complex. Make your decision easier by choosing a batch controller that gives you the flexibility to transition easily as your business matures and grows.The terminal can handle up to 28 mate-rials with recipe-specific control includ-ing conditional control tasks, recipe res-caling, timing functions, and control of discrete inputs and outputs.Whether you batch manually or use auto-mation, METTLER TOLEDO’s IND780 willimprove your process and make it easy to switch when the time is right./780batch-be P reparing a batch by hand is labor-in-tensive. But switching to a completely automated solution depends on numer-ous factors such as costs or project com-plexity. IND780batch is a batch control-ler that provides all the flexibility, power, and reliability in a single terminal to help you with whatever type of batch process-ing you use.Error-free manual batching IND780batch can manage your manual material formulation process by prompt-ing your operator through the recipe and eliminating variables that cause mis-takes and re-work. The ability to connect a bar code reader along with track-and-trace features allows the operator to col-lect batch history information for com-plete batch documentation.An automatic batch controller IND780batch works also as a stand-alone solution that does not require interface to a PLC or DCS while delivering the benefits of a full-featured batch control solution.IND780batchHand AddBench ScaleMaterial 1Hand AddScaleDischarge MaterialTo storage tankFast Feed Fine FeedFast Feed Fine Feed Fast Feed Fine FeedMaterial 24A single shard of glass in a bottle could have devastating effects – both on the consumer and the reputation of the manufacturer. X-ray inspection systems are vital on production lines using glass to ensure only high-quality, contaminant-free beverages reach the retail supply chain.Seeing the Problem ClearlyInspection Solutions for Glass BottlesG l a s s C o n t a m i n a n t D e t e c t i o ning inspection performance and production uptime for manufacturers.High speedsDepending on the application, the X3750 can accurately inspect up to 1,200 bot-tles per minute, optimizing process effi-ciency. A high-speed automated reject-de-vice ensures contaminated products are removed without slowing production. The machine’s data logging and x-ray image library include automatic time and date stamps for rejected products, enabling manufacturers to demonstrate due dil-igence.Flexibility and consumer safety The X3750 x-ray inspection system can be adjusted to suit a wide range of bot-tle sizes using full-length guide-rail sys-tems. This ensures smooth product han-dling and repeatable product changeovers which are vital to ensure productivity lev-els are maximized.The challengeGlass bottles are among the most challeng-ing packaging formats to inspect. This is primarily because the contaminants are most likely to be glass of the same mate-rial and density as the packaging itself. The size and shape of bottles can add to the complexity of inspection, as the base, side-walls and neck can mask a contaminant, causing inspection blind spots.A further challenge is unusually shaped bottles that present themselves to the x-ray system in different orientations and have no fixed reference points. This can lead to false rejects as the x-ray images captured are constantly changing.The only solutionTo overcome these challenges, METTLER TOLEDO has developed the X3750 x-ray inspection system to specifically address these issues. X-ray inspection is the only technology capable of detecting glass con-taminants within glass bottles.Overcoming the problemThe X3750 is the most advanced x-ray system on the market for glass-in-glass inspection. It features an angled x-ray beam and innovative detector technology allowing inspection throughout all areas of a bottle by sending x-rays through the base area while simultaneously inspect-ing through the sides of the bottle.This provides all-round inspection, as the “crown” or domed base of the bot-tle appears flat, effectively removing blind spots. The beam passes level with the shoulder of the container (below the threads and cap) and produces a far less complex image, enhancing detection ca-pability. The inspection angle also en-ables fill-level inspection to take place at high line speeds.The X3750 uses unique software which removes the conveyor belt from the x-ray image, allowing the use of a highly dura-ble modular plastic conveyor belt, improv-METTLER TOLEDO Beverages News 21Advanced x-ray inspection technologyfor glass-in-glass contaminant detection For manufacturers producing beveragesin glass containers, x-ray is a must-haveto ensure that contaminants are detectedand rejected effectively, safeguarding boththe company’s brand and the welfare of itsconsumers./safelinex3750-beGuarantee all-round glass inspection X-ray technology can provide thesolution for detecting glass con-taminants in glass containers.For more in-depth information about how to guarantee all-round glass inspection download our white paper:/xray-glassinglass-be METTLER TOLEDO Beverages News 21All areas of the bottle are inspected5Less Beer Loss at the Filling Line and Longer Shelf LifeO p t i c a l D O S e n s o r sDissolved oxygen spoils beer, so levels must be kept minimal right through to bot-tling. A rapid response dissolved oxygen sensor with a low detection limit reduces beer loss at the filling line and ensures beer shelf life is maximized.Optical technology delivers fast responseOptical sensors have no electrolyte, so po-larization is not required. And the ab-sence of electrolyte and internal mem-brane is why optical sensors have very low maintenance. Compared with am-perometric probes, optical sensors have far higher signal stability. They also have an extremely fast response rate: typically98 % of final value in less than 20 sec-onds. That can result in a significant sav-ing of product at the filling line.METTLER TOLEDOʼs InP ro 6970 i opti-cal dissolved oxygen sensor has been de-signed specifically for the needs of the brewery industry. It is fully CIP and SIP resistant and highly tolerant of pressure shocks, rapid temperature changes, andEliminate polarization of DO sensorsAmperometric DO sensors have served the brewery industry well for many years. However, they are not without their issues: polarization time, maintenance time, measurement drift, and speed of response can all be a concern. That is why optical measuring technology is rapidly becom-ing the new standard in DO measurement.7Diagnostics that tell you when maintenance will be requiredThe InP ro 6970 i optical DO sensor and M400 transmitter feature METTLER TOLEDOʼs unique Intelligent Sensor Man-agement (ISM®) technology. Among its features, ISM means that sensors con-tain a set of advanced diagnostic tools. For example, on the InPro 6970 i the Dy-namic Lifetime Indicator monitors the quality of the OptoCap after each calibra-tion and, together with measurements of the current process conditions, calculates and displays on the M400 the remaining number of days until the OptoCap should be replaced.Sensors that are stored calibrated, ready to goAll sensor data, including calibration his-tory, are stored in the sensor itself. This means that after performing mainte-nance and calibration, installation in the process is simple. Thanks to ISMʼs Plug and Measure feature, upon connecting the sensor to an M400, all relevant data is au-tomatically transferred to the transmitter and an oxygen reading is available imme-diately. Sensors can even be pre-calibrated and stored ready for use, making sensor replacement even quicker and more convenient.Sensors designed forbrewery industry needsThe combination of optical measure-ment technology, ISM, and METTLER TOLEDOʼs years of experience in de-signing sensors for the brewery industry means that the InPro 6970 i is one of the most efficient and reliable oxygen sensors on the market.Discover more at:/InPro6970i-bethe stop-of-flow effects that can causeamperometric probes to generate falsealarms.The sensorʼs oxygen-sensing element, theOptoCap™, is the only consumable part.OptoCap replacement can be done in lessthan a minute and is required approxi-mately only once per year.As a partnering transmitter, the M400 isa simple to operate, flexible unit. It is amulti-parameter transmitter, so can beused for a wide range of brewery pro-cesses.For cold block applicationsand filling lines: InPro 6970 i• D O detection down to 2 ppb in beerand water• F ast response time minimizes beerlosses• S ensing element is immune topressure shocks and extreme CIPcycle conditions• N o polarization time or electrolyterequiredMETTLER TOLEDO Beverages News 218W e i g h M o d u l eMany weigh modules installed in beverage plants and breweries are potential breeding grounds for microbes. Our new weigh module for tank installations is optimized for fast wash-down processes and will reduce contamination risk in your production environment.Eliminating Microbes Just Got Easier Better Design Enables Better CleaningMETTLER TOLEDO Beverages News 219Watch the Weigh Module in ActionThis 2-minute video shows how our new hy-gienic design enables thorough wash-down./IND-SWB805-Video-beSelf-Draining SurfacesNSF ApprovedFDA Approved MaterialeHygienic Designed Load CellFulfills EHEDGdesign requirementsMETTLER TOLEDO Beverages News 21Precise Tank Weighing• 110, 220, 550, 1,100, 2,200, 4,400 kg capacities • OIML, NTEP , ATEX, FM approved• Stabilizer option for agitator applications• Footprint comparable to SWB505 MultiMount™/ind-swb805-beSWB805 MultiMount™Hygienic Design Weigh Module • NSF International-certified• Fulfills EHEDG design requirements • Self-draining for fast drying• Mirror-polishing prevents bacteria accumulation • Stainless steel load cell10METTLER TOLEDO Beverages News 21Take Control of Your Vehicle Scale Three Options for Greater ProductivityS c a l e T e r m i n a l sA scale terminal is more than just a weight display. It is the control center for your vehicle scale, and it enables the scale to interact with other equipment. Selecting the right terminal is essential for maximizing the productivity of your weighing operation.An IND570 terminal can control external devices and share transaction data with a personal computer or network.Personal ComputerRemote DisplayIND570 TerminalPrinterVehicle Scale The new IND570 terminal is designed to meet the needs of many weighing applica-tions. When configured for vehicle weigh-ing, the terminal processes inbound/outbound transactions on one scale. Its ability to store 100 vehicle IDs and tare weights helps speed up transactions.With the addition of the IND570, the METTLER TOLEDO line of vehicle-weigh-ing terminals offers the perfect fit for any application. This product line is nota simple good-better-best range of op-tions. All three terminals are high-per-formance units that provide fast and easy processing. The difference is their capa-bility levels.Key capabilitiesThe first thing to consider is the number of scales that will be needed for inbound/outbound weighing. Select a terminal to handle your scales, or add DataBridge™ software to connect multiple scales to a shared database.Diagnostic capabilities give you a window into a scale’s operations. P OWERCELL ®load cells generate a wealth of data that can be used to verify weighing accu-racy and diagnose problems. The termi-nal provides easy access to this informa-tion so that you can take proactive steps to keep a scale operating reliably.Connectivity options range from basic se-rial and Ethernet communication to the ability to interact with programmablelogic controllers. /veh-terminals-be11METTLER TOLEDOBeverages News 21Vehicle-Weighing TerminalsBy choosing the right METTLER TOLEDO terminal, you get the full capabilities that your application requires at an economical price./ind-beFor more information3EnhanceBatching ProcessesInaccurate weighing results causes a US-based brewery to switch to a new batch-ing system. Now she is saving about a ton of materials every two weeks.2Accelerate Quality AnalysisBy automating routine testing with an autosampler, beverage manu-facturers can save up to ten min-utes per sample.1Minimize Vehicle-Scale DowntimeOne customer had problems with high maintenance costs and real-ized savings of nearly $20,000 by upgrading to new digital load cells.5Observe Process Quality A brewery in Brazil built in an opti-cal product monitor and is saving now thousands of liters of productper month.4 Optimize Filling Processes A Scotch whisky producer has reduced overfilling and saved about 1 ml of whisky per bottle.Ensure your company is operating at peak performance and hidden losses do not undermine your productivity or profits. Here are5 tips recently gathered from beverage manufacturers around the world.Download our white paper to see solutions:/ind-wp-hidden-losses-be5 Tips to Avoid Hidden Losses And Increase Beverage-Industry ProductivityN e w I n d u s t r i a l We i g h i n g C a t a l o g w w w.m t.c o m /i n d -c a ta lo g -b e F r e e D o w n l o a dLocal contact: /contactsDocument No. 303274994GE[ENGF (KDGT YKVJ 2QUV EQPUWOGT 9CUVGMettler-Toledo, LLC 1900 Polaris Parkway Columbus, OH 43240Mettler-Toledo Hi-Speed 5 Barr RoadIthaca, NY 14850Mettler-Toledo Safeline 6005 Benjamin Road Tampa, FL 33634Mettler-Toledo CI-Vision 2640 White Oak Circle, Unit A Aurora, IL 60502Mettler-Toledo, Inc.2915 Argentia Road, Unit 6Mississauga, Ontario L5N 8G6。
图像处理和计算机视觉中的经典论文
前言:最近由于工作的关系,接触到了很多篇以前都没有听说过的经典文章,在感叹这些文章伟大的同时,也顿感自己视野的狭小。
想在网上找找计算机视觉界的经典文章汇总,一直没有找到。
失望之余,我决定自己总结一篇,希望对 CV领域的童鞋们有所帮助。
由于自
己的视野比较狭窄,肯定也有很多疏漏,权当抛砖引玉了
1990年之前
1990年
1991年
1992年
1993年
1994年
1995年
1996年
1997年
1998年
1998年是图像处理和计算机视觉经典文章井喷的一年。
大概从这一年开始,开始有了新的趋势。
由于竞争的加剧,一些好的算法都先发在会议上了,先占个坑,等过一两年之后再扩展到会议上。
1999年
2000年
世纪之交,各种综述都出来了
2001年
2002年
2003年
2004年
2005年
2006年
2007年
2008年
2009年
2010年
2011年
2012年。
KODAK VISION3 50D 色彩肤色胶片 5203 7203的PDF文件说明书
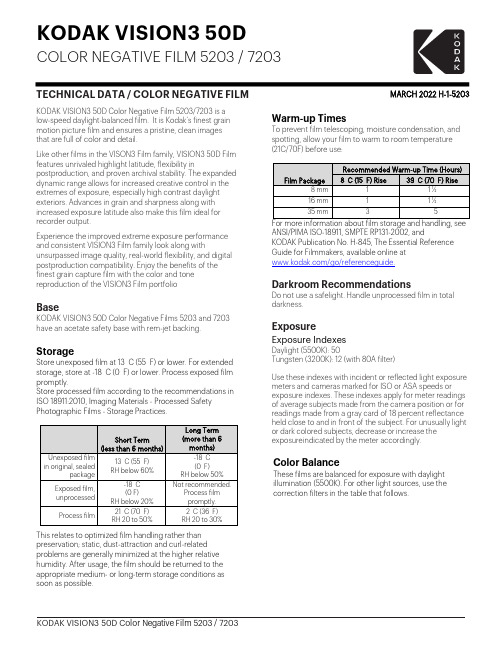
KODAK VISION3 50DCOLOR NEGATIVE FILM 5203 / 7203TECHNICAL DATA / COLOR NEGATIVE FILM MARCH 2022H-1-5203 KODAK VISION3 50D Color Negative Film 5203/7203 is alow-speed daylight-balanced film. It is Kodak’s finest grainmotion picture film and ensures a pristine, clean imagesthat are full of color and detail.Like other films in the VISON3 Film family, VISION3 50D Filmfeatures unrivaled highlight latitude, flexibility inpostproduction, and proven archival stability. The expandeddynamic range allows for increased creative control in theextremes of exposure, especially high contrast daylightexteriors. Advances in grain and sharpness along withincreased exposure latitude also make this film ideal forrecorder output.Experience the improved extreme exposure performanceand consistent VISION3 Film family look along withunsurpassed image quality, real-world flexibility, and digitalpostproduction compatibility. Enjoy the benefits of thefinest grain capture film with the color and tonereproduction of the VISION3 Film portfolioBaseKODAK VISION3 50D Color Negative Films 5203 and 7203have an acetate safety base with rem-jet backing.StorageStore unexposed film at 13 C (55 F) or lower. For extendedstorage, store at -18 C (0 F) or lower. Process exposed filmpromptly.Store processed film according to the recommendations inISO 18911:2010, Imaging Materials - Processed SafetyPhotographic Films - Storage Practices.Short Term (less than 6 months)Long Term (more than 6 months)Unexposed film in original, sealedpackage13 C (55 F)RH below 60%-18 C(0 F)RH below 50%Exposed film, unprocessed-18 C(0 F)RH below 20%Not recommended.Process filmpromptly.Process film21 C (70 F)RH 20 to 50%2 C (36 F)RH 20 to 30%This relates to optimized film handling rather than preservation; static, dust-attraction and curl-related problems are generally minimized at the higher relative humidity. After usage, the film should be returned to the appropriate medium- or long-term storage conditions as soon as possible. Warm-up TimesTo prevent film telescoping, moisture condensation, and spotting, allow your film to warm to room temperature (21C/70F) before use:Film PackageRecommended Warm-up Time (Hours)8 C (15 F) Rise 39 C (70 F) Rise8 mm 1 1 ½16 mm 1 1 ½35 mm 3 5For more information about film storage and handling, see ANSI/PIMA ISO-18911, SMPTE RP131-2002, andKODAK Publication No. H-845, The Essential Reference Guide for Filmmakers, available online at/go/referenceguide.Darkroom RecommendationsDo not use a safelight. Handle unprocessed film in total darkness.ExposureExposure IndexesDaylight (5500K): 50Tungsten (3200K): 12 (with 80A filter)Use these indexes with incident or reflected light exposure meters and cameras marked for ISO or ASA speeds or exposure indexes. These indexes apply for meter readings of average subjects made from the camera position or for readings made from a gray card of 18 percent reflectance held close to and in front of the subject. For unusually light or dark colored subjects, decrease or increase the exposure i ndicated by the meter accordingly.Color BalanceThese films are balanced for exposure with daylight illumination (5500K). For other light sources, use the correction filters in the table that follows.Daylight (5500 K)None50 Metal Halide None50H.M.I.None50 KINO FLO 55None50 Tungsten (3000 K)WRATTEN 2 OpticalFilter / 80A12Tungsten (3200 K)WRATTEN 2 OpticalFilter / 80A 12KINO FLO 29 KINO FLO 32WRATTEN 2 OpticalFilter / 80A12Fluorescent, WarmWhite †Color CompensatingCC20M + CC05R25Fluorescent, CoolWhite †Color CompensatingCC40B20* These are approximate corrections only. Make final corrections during printing.† These are starting-point recommendations for trial exposures. If the kind of lamp is unknown, a KODAK Color Compensating Filter CC20M + CC10B can be used with an exposure index (EI) of 25.Note: Consult the manufacturer of high-intensity ultraviolet lamps for safety information on ultraviolet radiation and ozone generation.Exposure Table-Daylight IlluminationAt 24 frames per second (fps), 180-degree shutter opening, use this table for average subjects that contain a combination of light, medium, and dark colors:Lens Aperture f/1.4f/2f/2.8f/4f/5.6f/8f/11f/16FootcandlesRequired50100 200400800160032006400Reciprocity CharacteristicsYou do not need to make any filter corrections or exposure adjustments for exposure times from 1/1000 of a secondto 1 second.ProcessingProcess in Process ECN-2.Most commercial motion-picture laboratories provide a processing service for these films. See KODAK Publication No. H-24.07, Processing KODAK Color Negative Motion Picture Films, Module 7 available online at/go/h24, for more information on the solution formulas and the procedure for machine processing these films. There are also pre-packaged kits available for preparing the processing solutions. For more information on the KODAK ECN-2 Kit Chemicals, check Using KODAK Kit Chemicals in Motion Picture Film Laboratories KODAK Publication No. H-333, availableonline at /go/h333.IdentificationAfter processing, the product code numbers 5203, or 7203 emulsion, roll, and strip number identification, KEYKODE Numbers, and manufacturer/film identification code (ER) are visible along the length of the film.Post-ProductionScanningThe wider exposure latitude in KODAK VISION3 Films differentiate film capture from the limited dynamic range of digital capture. Digital "dodging and burning," a very powerful tool in the colorists' toolkit, is now even more powerful—up to two stops more image information canbe extracted from scene highlights in VISION3 Films.If traditional 10-bit scanner data encoding schemes are used to digitize films having this extended density range, highlight information captured on these films could be lost. Kodak has recommendations for extracting the full density range stored on highdynamic range films in a technical document titled Scanning Recommendations for Extended Dynamic Range Camera Films, available online at/go/scanning.Laboratory Aim Densities (LAD)To maintain optimum quality and consistency in the final prints, the laboratory must carefully control the color timing, printing, and duplicating procedures. To aid in color t iming and curve placement, negative originals should be t imed relative to Laboratory Aim Density (LAD) Control Film. The LAD Control Film provides both objective sensitometric control a nd subjective verification of the duplicating procedures used by the laboratory.In the LAD Control Method, the electronic color analyzer used for color timing is set-up with the LAD Control Film to produce a gray video display of the LAD patch, corresponding to 1.0 neutral density (gray) on the print. The negative printing original is then scene-to-scene timed. There are specific LAD values for each type of print or duplicating film that the original can be printed on. For print films, the LAD patch is printed to a neutral gray of 1.0 visual density. For duplicating films, the specified aims are at the center of the usable straight-line portion of the sensitometric curve of the film.Due to normal variations in exposure and processing of color negative films, particular scenes may not print exactly at the same printer lights as the LAD Control Film. The LAD Control Film is intended as a set-up tool for electronic color analyzers and printers. It is NOT a reference that every scene must match. Normal film-to-film and scene-to-scene exposure variability is accommodated by the color timing (grading) process, on an electronic color analyzer set up with the LAD Control Film. Normally exposed and processed color negatives will typically print well within the range of an additive printer setup with the LAD Control Film, although SIGNIFICANT or UNEXPECTED departures from this center point balance may indicate an exposure/filtration problem with the cinematography or with the process control. Some specialized films and/or specialized negative processing techniques (push-processing, pull-processing, "skip-bleach" processing, etc.) may require more extreme adjustment from the LAD printing condition to attain desired results.More information is contained in KODAK Publication H-61,Image StructureFor more information on image-structure characteristics, see KODAK Publication No. H-845, The Essential Reference Guide for Filmmakers available online at /go/referenceguide .Modulation Transfer FunctionThe "perceived" sharpness of any film depends on various components of the motion picture production system. The camera and projector lenses and film printers, among other factors, all play a role. But the specific sharpness of a film can be measured and is charted in the Modulation Transfer Function Curve.This graph shows a measure of the visual sharpness of this film. The x-axis, “Spatial Frequency,” refers to the number of sine waves per millimeter that can be resolved. The y-axis, “Response,”corresponds to film sharpness. The longer and flatter the line, the more sine waves per millimeter that can be resolved with a high degree of sharpness — and the sharper the film.rms GranularityThe “perception” of the graininess of any film is highly dependent on scene content, complexity, color, and density. Other factors, such as film age, processing,exposure conditions, and telecine transfer may also have significant effects.Read with a microdensitometer, using a 48-micrometre aperture. To find the rms Granularity value for a given density, find the density on the left vertical scale and follow horizontally to the characteristic curve and then go vertically (up or down) to the granularity curve. At that point, follow horizontally to theGranularity Sigma D scale on the right. Read the number and multiply by 1000 for the rms value.Note: This curve represents granularity based on modified measuringtechniques. Sensitometric and Diffuse RMS Granularity curves are produced on different equipment. A slight variation in curve shape may be noticed.SensitometryThe curves describe this film's response to red, green, and blue light. Sensitometric curves determine the change in density on the film for a given change in log exposure.Spectral SensitivityThese curves depict the sensitivity of this film to the spectrum of light. They are useful for determining,modifying, and optimizing exposure for blue- and green-screen special-effects work.Spectral Dye-Density CurvesThese curves depict the spectral absorption of the dyesformed when the film is processed. They are useful for adjusting or optimizing any device that scans or prints the film.Note: Cyan, Magenta, and Yellow Dye Curves are peak-normalized.Note: The sensitometric curves and data in this publication represent product tested under the conditions of exposure and processing specified. They are representative of production coatings, and therefore do not apply directly to a particular box or roll of photographic material. They do not represent standards or specifications that must be met by Eastman Kodak Company. The company reserves the right to change and improve product characteristics at any time.Available Roll Lengths and FormatsSee Kodak Motion Picture Products Catalog at /go/mpcatalog To order film in the United States and Canada, call 1- 800-356-3259, prompt 3.Worldwide customers can find the nearest sales office at /go/salesofficesKODAK VISION3 50D Color Negative Film 5203 / 7203KODAK Publication No. H-1-5203 Kodak, Keykode, Vision, and Wratten and the Kodak logo are trademarks.Revised 3-22© 2022 EASTMAN KODAK COMPANY。
《IEEEsignalprocessingletters》期刊第19页50条数据
《IEEEsignalprocessingletters》期刊第19页50条数据《IEEE signal processing letters》期刊第19页50条数据https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html academic-journal-foreign_ieee-signal-processing-letters_info_57_1/1.《Robust Video Hashing Based on Double-Layer Embedding》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html2.《Removal of High Density Salt and Pepper Noise Through Modified Decision Based Unsymmetric Trimmed Median Filter》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html3.《Performance Comparison of Feature-Based Detectors for Spectrum Sensing in the Presence of Primary User Traffic》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html4.《An Optimal FIR Filter With Fading Memory》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html5.《Piecewise-and-Forward Relaying in Wireless Relay Networks》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html6.《Non-Shift Edge Based Ratio (NSER): An Image Quality Assessment Metric Based on Early Vision Features》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html7.《Joint Optimization of the Worst-Case Robust MMSE MIMO Transceiver》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html8.《A New Initialization Method for Frequency-Domain Blind Source Separation Algorithms》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html9.《A Method For Fine Resolution Frequency Estimation From Three DFT Samples》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html10.《Position-Patch Based Face Hallucination Using Convex Optimization》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html11.《Signal Fitting With Uncertain Basis Functions》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html12.《Optimal Filtering Over Uncertain Wireless Communication Channels》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html13.《The Student's -Hidden Markov Model With Truncated Stick-Breaking Priors》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html14.《IEEE Signal Processing Society Information》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html15.《Acoustic Model Adaptation Based on Tensor Analysis of Training Models》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html16.《On Estimating the Number of Co-Channel Interferers in MIMO Cellular Systems》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html17.《Period Estimation in Astronomical Time Series Using Slotted Correntropy》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html18.《Multidimensional Shrinkage-Thresholding Operator and Group LASSO Penalties》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html19.《Enhanced Seam Carving via Integration of Energy Gradient Functionals》letters_thesis/020*********.html20.《Backtracking-Based Matching Pursuit Method for Sparse Signal Reconstruction》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html21.《Performance Bounds of Network Coding Aided Cooperative Multiuser Systems》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html22.《Table of Contents》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html23.《Bayesian Estimation With Imprecise Likelihoods: Random Set Approach》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html24.《Low-Complexity Channel-Estimate Based Adaptive Linear Equalizer》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html25.《Tensor Versus Matrix Completion: A Comparison With Application to Spectral Data》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html26.《Joint DOD and DOA Estimation for MIMO Array With Velocity Receive Sensors》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html27.《Regularized Subspace Gaussian Mixture Models for Speech Recognition》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html28.《Handoff Optimization Using Hidden Markov Model》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html29.《Standard Deviation for Obtaining the Optimal Direction in the Removal of Impulse Noise》letters_thesis/020*********.html30.《Energy Detection Limits Under Log-Normal Approximated Noise Uncertainty》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html31.《Joint Subspace Learning for View-Invariant Gait Recognition》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html32.《GMM-Based KLT-Domain Switched-Split Vector Quantization for LSF Coding》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html33.《Complexity Reduced Face Detection Using Probability-Based Face Mask Prefiltering and Pixel-Based Hierarchical-Feature Adaboosting》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html34.《RLS Algorithm With Convex Regularization》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html35.《Solvability of the Zero-Pinning Technique to Orthonormal Wavelet Design》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html36.《Power Spectrum Blind Sampling》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html37.《Noise Folding in Compressed Sensing》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html38.《Fast Maximum Likelihood Scale Parameter Estimation From Histogram Measurements》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html39.《Elastic-Transform Based Multiclass Gaussianization》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html40.《Improving Detection of Acoustic Signals by Means of a Time and Frequency Multiple Energy Detector》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html41.《Efficient Multiple Kernel Support Vector Machine Based Voice Activity Detection》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html42.《Performance Analysis of Dual-Hop AF Systems With Interference in Nakagami-$m$ Fading Channels》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html43.《Illumination Normalization Based on Weber's Law With Application to Face Recognition》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html44.《A Robust Replay Detection Algorithm for Soccer Video》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html45.《Regularized Adaptive Algorithms-Based CIR Predictors for Time-Varying Channels in OFDM Systems》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html46.《A Novel Semi-Blind Selected Mapping Technique for PAPR Reduction in OFDM》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html47.《Widely Linear Simulation of Continuous-Time Complex-Valued Random Signals》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html48.《A Generalized Poisson Summation Formula and its Application to Fast Linear Convolution》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html49.《Multiple-Symbol Differential Sphere Detection Aided Differential Space-Time Block Codes Using QAM Constellations》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html50.《Low Rank Language Models for Small Training Sets》原⽂链接:https:///doc/f83f6c1c4ad7c1c708a1284ac850ad02de800787.html /academic-journal-foreign_ieee-signal-processing-letters_thesis/020*********.html。
常见眼镜专用术语
常见眼镜专用术语balFor a Balance prescription, you should take the numbers for the eye that has a prescription and duplicate them onto the other eye. This will make both lenses for the glasses appear "balanced" when you look at the wearer.plPL or Plano in the sphere number means that the SPH is left at 0.00 for that eye.dsIf your prescription says DS in the cylinder (CYL) box then you enter the CYL as 0.00 and Axis number as '0' on that eye.sphIf your prescription says SPH in the cylinder (CYL) box then you enter the CYL as 0.00 and Axis number as '0' on that eye.AddThe NV-ADD is needed when you order bifocals or progressives. It should say ADD or NV or Reading Addition on your prescription. The add value is the same for both eyes. It will be added on the OS side even though it is not printed there.ABBEThe "Abbe" value of a lens indicates the ability of the lens to transmit light without chromatic aberration. The Abbe value is between 1 and 100, with high numbers indicating the lens is less likely to cause chromatic aberration. The Abbe value of CR-39 plastic (the most common lens material) is 58. The Abbe value of polycarbonate material is 31. Generally, the higher the index of refraction for a given lens material, the lower the Abbe value is.The Abbe numbers of our lenses are: 1.50 index lens -- 58; 1.57 index lens -- 42; 1.61 index lens -- 34; 1.67 index lens -- 32; 1.74 index lens -- 30. 镜片折射率越大,ABBE阿贝数越低,色差chromatic aberration越大Cyl, Axis convertWhen your Cylinder values are positive, they must be converted to negative for production purposes and is a standard procedure in the optical industry. To accomplish this, the Cylinder values will be combined with the Sph values and the result becomes the new Sph value. Then, the Axis will be increased by 90 when it is less than 90 and it will be reduced by 90 when it is more than 90. Since your Cylinder values are positive, your prescription canalso be converted to the below one.V AThese numbers are the visual acuity. They are not part of the prescription and are not needed to order glasses.Prism DefinitionPrism is the prismatic power used to correct vision displacement, like double vision. Most eyeglass prescriptions do not have prism correction.Saddle bridgeWhat’s a saddle bridge? The bridge goes over the nose like a saddle on a horse.PDThe pupillary distance is the measurement from one eye to the other. You can call your doctor for this measurement or have a friend help you. Using the metric side of the ruler, have your friend measure from the middle of one pupil to the middle of the other pupil. Remember that you should not look at their nose but focus on something behind them in the distance.svd (single PD VS dual PD)Single PD is the measurement from eye to eye whereas the dual PD is the measurement from the center of your nose to each eye.distance pdDistance PD is used for ordering progressive, bifocal and single vision distance glasses.near pdNear pd is used for ordering single vision reading glassesdistance/reading PD:The larger value represents the distance PD, which is what you will normally need for our site. The smaller value is used only for ordering single-vision reading glasses.segThe segment for lined bifocals starts at 4mm below the center of the lens. For progressives it starts at 5mm above the center of the lens.In some instances, the difficulty with vision relates to the placement of the glasses on the bridge of your nose. Your vision might be corrected by raising the height of the glasses.In some instances, the difficulty with vision relates to the placement of the glasses on the bridge of your nose. If your vision is corrected by raising the height of the glasses, simply close the nose pads slightly, and if necessary, also close the angle of the tips of the temple.Conversely, if the corrected area is too high, opening the nose pads slightly so that the glasses rest slightlylower on your face, may resolve any issue you have with the correction. If necessary, open the angle of the tips of the temples so that the glasses may be allowed to slide down ever slightly on your nose.The reading area is approximately the lower quarter, central third of the lens. The height of the progressive corridor can be short, medium or long, and is dependent on the height of the lens: the taller the lens, the longer the corridor. The corridor begins just above the centerline of the lens. The lens height for any Progressive lens must be 30mm or greater.SVSingle vision means the entire lens is one prescription.Single Vision lenses are the standard eyeglass prescription. These glasses are for one field of vision across the entire lens, whether specifically for distance vision, near-vision reading glasses or somewhere in-between such as computer-distance glasses. There are no lens height requirements for single vision prescriptions.bfA bifocal lens has two fields of vision separated by a line. Generally the top is designated for distance-vision or computer-distance and the bottom for near-vision work such as reading.Bifocals are lenses with two fields of vision separated by a line. Usually the top is designated fordistance-vision or computer-distance and the bottom for near-vision work such as reading. The bottom reading area is 28mm wide and is positioned just below the centerline of the lens. The position of the bi-focal area will be affected by the height of the lens chosen. The lens height for a Bifocal lens must be 30mm or greater.progA progressive lens is a no-line lens with three focal centers - distance on top, computer in the middle, reading on bottom. The correction does not go all the way across the lens but is shaped like an hourglass (funnel or mushroom) down the center of the lens. It is expected to take some time to get used to this lens type.XSThe Extra Strength Charge is usually added because either your SPH or CYL is stronger than normal for the lens you chose.writtenPrescriptions are written to a standard. The right eye (OD) is the top line; the left eye (OS) is the bottom line. And they are written sphere (SPH), cylinder (CYL) and axis going left to right.distanceTo get distance only glasses, enter the SPH, CYL and Axis as written by the doctor. The ADD is not needed when ordering distance glasses.readIn order to get reading glasses, take the ADD number and add it to the SPH number. Enter the new total in the SPH and do this for both eyes. Remember that the CYL and AXIS don't change so enter them exactly as they are written. And reduce the PD by 3mm.computerIn order to get single vision computer glasses, take the ADD number and divide it in half. Then add the 1/2 ADD to the SPH number. Enter the new total in the SPH and do this for both eyes. Remember that the CYL and AXIS don't change so enter them exactly as they are written.readersYou will select single vision as the prescription type.You will need to know your PD, and reduce the PD number you get by 3mm for these readers. You can select a no charge lens, such as the 1.57 mid index lens, or a thinner lens, such as the 1.61 or 1.67, on the LENS dropdown. Down below on the prescription you can enter the OD and OS SPH whatever reading power you want, such as +2.00 or +2.25 etc. Enter the CYL and AXIS as zero.Cyl, Axis convertWhen your Cylinder values are positive, they must be converted to negative for production purposes and is a standard procedure in the optical industry. To accomplish this, the Cylinder values will be combined with the Sph values and the result becomes the new Sph value. Then, the Axis will be increased by 90 when it is less than 90 and it will be reduced by 90 when it is more than 90. Since your Cylinder values are positive, your prescription can also be converted to the below one.PolarizedA Polarized lens is a sunglass lens that greatly reduces the glare from light that is Polarized horizontally, meaning the light reflecting off horizontal surfaces, such as a white sidewalk, a white-sand beach, snow, or sunlight reflecting on water.photo VS polarizedPhotochromic lenses are clear when they're out of the sun, dark in bright sunlight. Polarized lenses are permanent sunglasses that don't change color.best tint colorGray is the darkest and best tint color. Amber, at 80 percent darkness, is a nice dark brown that is good for sunglasses, too, especially in a brown, gold, red, or tortoiseshell frame.GradientGradient tints are used for sunglasses lenses. The color is darker at the top than at the bottom of the lens. They will have an 80% sunglasses level tint at the top.AR coatingAnti Reflective (AR) coating improves both the vision and the appearance of the glasses. It is a layered metal oxide coating applied to both sides of the lens that greatly reduces both the internal and external the reflections on the lens surface while allowing more light through the lens.Lens - CleaningWe do not recommend cleaning the lenses with alcohol as this may damage the anti-reflective coating on your lenses. Additionally, the lens should not be cleaned with any alkaline liquid and hot water. You may clean the lens with the cold water, and blot up the water with the soft cloth that was included with your order.We hope this helps. Please let us know if we can assist you with anything else.plastic VS acetateIf you like plastic frames, choose an acetate frame, because acetate is cellulose-based, and therefore hypoallergenic.bridgeTo get the bridge measurement, measure from the inside of one lens to the inside of the other lens. You are measuring where they are closest together.measureframeTo select a frame, we advise that you take a ruler and measure your current pair. Then, select a frame online that has measurements within +/- 3mm of your current pair to ensure fit. (except the bridge that has measurementwithin +/-1mm of your current pair)framedimMost frames will have a set of three numbers on the inside temple arm or near the bridge. It will look something like 50 o18 135. The first number is the lens width, the second is the bridge and the third is the temple length. You can use this to compare frames we offer online. You can get the measurements of any frame online by clicking on the picture to view the popup.halfrimFirst, remove the demo lenses in the replacement frame and leave the filament wire intact. Then, take your lens and place it up into the top half of the frame. Hold this in one hand. Now, take the ribbon/floss and loop it over the filament wire and hold it between your thumb and fingers. Use it to pull the wire under the lens and into the groove. Once it's seated, run the ribbon/floss along the groove until you get to the other end of the lens. Pull it out and the lens should be seated in the frame.。
镜头性能曲线
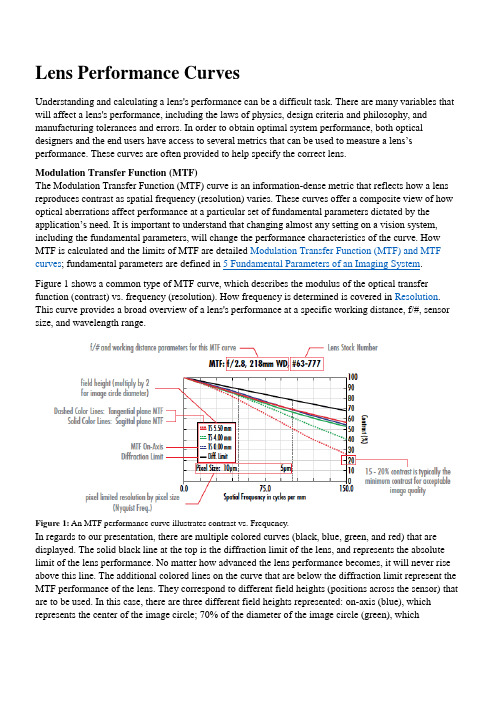
Lens Performance CurvesUnderstanding and calculating a lens's performance can be a difficult task. There are many variables that will affect a lens's performance, including the laws of physics, design criteria and philosophy, and manufacturing tolerances and errors. In order to obtain optimal system performance, both optical designers and the end users have access to several metrics that can be used to measure a lens’s performance. These curves are often provided to help specify the correct lens.Modulation Transfer Function (MTF)The Modulation Transfer Function (MTF) curve is an information-dense metric that reflects how a lens reproduces contrast as spatial frequency (resolution) varies. These curves offer a composite view of how optical aberrations affect performance at a particular set of fundamental parameters dictated by the application’s need. It is important to understand that changing almost any setting on a vision system, including the fundamental parameters, will change the performance characteristics of the curve. How MTF is calculated and the limits of MTF are detailed Modulation Transfer Function (MTF) and MTF curves; fundamental parameters are defined in 5 Fundamental Parameters of an Imaging System.Figure 1 shows a common type of MTF curve, which describes the modulus of the optical transfer function (contrast) vs. frequency (resolution). How frequency is determined is covered in Resolution. This curve provides a broad overview of a lens's performance at a specific working distance, f/#, sensor size, and wavelength range.Figure 1: An MTF performance curve illustrates contrast vs. Frequency.In regards to our presentation, there are multiple colored curves (black, blue, green, and red) that are displayed. The solid black line at the top is the diffraction limit of the lens, and represents the absolute limit of the lens performance. No matter how advanced the lens performance becomes, it will never rise above this line. The additional colored lines on the curve that are below the diffraction limit represent the MTF performance of the lens. They correspond to different field heights (positions across the sensor) that are to be used. In this case, there are three different field heights represented: on-axis (blue), which represents the center of the image circle; 70% of the diameter of the image circle (green), whichrepresents about half the image area; and the full image circle (red), which is the corner of the image sensor that is in use. Note that some curves will contain more field points for analysis.The other noteworthy feature within the curves is the difference between solid and dashed lines, represented on the curve by the letters T and S, which represent the tangential (T: yz) and sagittal, or “radial” (S: xz) planes of focus, respectively. These fields are different due to aberra tions that are caused by asymmetry, such as astigmatism, which is why there is not a separate curve for tangential and sagittal on-axis. If element tilts or decenters existed, the asymmetry would cause there to be different T and S curves on-axis, as well.The MTF curve is a map of contrast vs. frequency. Interpretation of an MTF curve is highly application dependent.Depth of Field (DOF)The Depth of Field (DOF) plot displays how the MTF changes as details of a specific size (resolution, given as a frequency) move closer to, or farther away from, the lens without refocusing. In other words, how the contrast changes above and below the specified working distance. Figure 2 shows the type of DOF curve provided in TECHSPEC® lens datasheets.Figure 2: Depth of field performance curve shows how contrast changes with working distance.The depth of field plot shows the differences in MTF based on constant field heights (the different colors of the individual curves) for a fixed spacial frequency on the image side, with the diffraction limit left out. As the MTF is sampled at different positions along the optical axis, defocus is introduced into the system. In general, as defocus is introduced, the contrast will decrease. The horizontal line toward the bottom of the curve represents the depth of field at a specific contrast level (in this case, 20%). The generally accepted minimum contrast for a machine vision system to maintain accurate results is 20%.Relative IlluminationThe Relative Illumination curve is used to quantify changes in the illumination level across the sensor. Changes in illumination can have undesired effects on the final image when it comes to analysis. Details on what causes RI changes can be found in Sensor Relative Illumination, Roll Off and Vignetting. Thecurve in Figure 3a shows a typical relative illumination curve, with the relative brightness (relative to the brightest point in the image) vs. field height.Figure 3a: A relative illumination curve shows the relative brightness vs. field height at various f/#s.The different individual curves represent the relative illumination performance based on f/#. Note that as the f/# increases, relative illumination generally increases. Be careful not to confuse this with absolute brightness, as higher f/#s will still cause an overall brightness decrease. Learn more about f/# in f/# (Lens Iris/Aperture Setting)The x-axis represents the distance from the center of the sensor to the corner of the sensor. The y-axis indicates how much illumination exists at any position in the field relative to the point of highest illumination, typically the center of the field, set equal to 100%. In order to clarify how the lens's relative illumination will perform across different sensors, dotted lines representing different sensor diagonals have been included in the plots. Figure 3b is a projection of how the relative illumination in Figure 3a will look at f/1.4 in a real world image Learn more about relative illumination in Sensor Relative Illumination, Roll Off and Vignetting.Figure 3b: This plot shows how the f/1.4 curve blue in 2.8a will appear across a 2/3" image sensor.DistortionIn an imaging system, distortion causes apparent magnification changes with respect to field position. There are many ways to represent distortion, but Figure 4 shows field height vs. geometric distortion percentage, which is a typical plot that lens designers and engineers utilize to characterize distortion. Lean more about distortion in our application note, Distortion. The plot in Figure 4 shows distortion as the percentage of magnification shift (x-axis) moving from the center of the image to the corner of the image (y-axis). The larger the absolute percentage of distortion, the larger the difference between the ideal image map and the distorted one.Figure 4: A distortion curve illustrates the magnification shift from the center of the image to the edge.。
医院科室及眼科类的相关翻译.
medical department/department of internal medicine:内科gastroenterology dept. 消化科nephrology dept. 肾内科cardiology dept. 心脏科surgical deparment;department of surgery: 外科pediatrics department: 小儿科obstetrics and gynecology department: 妇产科ophtalmology department: 眼科dental department: 牙科ENT(ear-nose-throat)department: 耳鼻喉科urology department: 泌尿科dermatology department; skin department:皮肤科department of general surgery普通外科orthopedic surgery department: 矫形外科traumatology department: 创伤外科plastic surgery: 整形外科anesthesiology department: 麻醉科pathology department: 病理科cardiology department: 心脏病科psychiatry department: 精神病科orthopedics department: 骨科department of cardiac surgery: 心脏外科department of cerebral surgery: 胸外科neurology department: 神经科neurosurgery department: 神经外科thoracic surgery department: 脑外科department of anus & intestine surgery肛肠外科department of hepatobiliary surgery肝胆外科department of traditional Chinese medicine:中医科department of infectious diseases 传染病科geriatrics department:老人病专科hematology department:血液科department of rheumatism风湿科department of endocrinology内分泌科department of plastic surgery医学整形科hepatology department: 肝病专科nephrology department:肾脏科department of venereology性病专科department of physiotherapy 理疗科electrotherapy room 电疗科heliotherapy room 光疗科wax-therapy room 蜡疗科hydrotherapy room 水疗科nuclear medicine dept. 核医学科central laboratory 中心实验室clinical labororatory 临床实验室bacteriological labororatory 细菌实验室biochemical labororatory 生化实验室serological labororatory 血清实验室laboratory of immunology免疫室observation room 观察室reception room, waiting room 侯诊室VIP waiting room贵宾候诊室consultation room 诊察室therapeutic room治疗室isolation room 隔离室audiometric room测听室vision fuuction examination room 视功能室labour room 待产室delivery room 分娩室fetal monitor room胎心监护室induced abortion room人工流产室rest room for induced abortion人流休息室registration office: 挂号处out-patient department: 门诊部in-patient department: 住院部nursing department: 护理部consulting room: 诊室emergency room: 急诊室emergency operation room急诊手术室emergency observation room急诊观察室admitting office: 住院处operation room: 手术室cystoscopy room膀胱镜室department of endoscope内镜区endoscope room 内镜室fibrescope room纤维镜室gastroscope room胃镜室color ultrasonic room彩超室electrocardiogram room心电图室DSA room 心导管室vector-cardiography room 心向量室phono-cardiography room 心音图室electroencephalogram room脑电图室pulmonary function test room 肺功能室physiotherapy room 理疗室laser room 激光室dressing room换药室outpatient Surgical Center门诊手术中心X-ray department/department of radiology: 放射科fluoroscopic room 透视室dark room 暗室blood bank: 血库hemodialysis room血透室dispensary; pharmacy: 药房nutrition department 营养部diet- preparation department 配膳室therapeutic department 治疗室supply-room 供应室disinfection-room 消毒室dressing room 换药室mortuary 太平间record room 病案室doctor’s office 医生办公室nurse”s office 护士办公室nursing station护士站ward: 病房medical Ward 内科病房surgical Ward外科病房pediatric Ward儿科病房transfusion room输液室surgery therapeutic room外科治疗室coronary Care Unit (CCU)心脏重症室resuscitation room抢救室intensive Care Unit (ICU)重症室medical Intensive Care Unit (MICU)内科重症室neonatal Intensive Care Unit (NICU)新生儿重症室pediatric Intensive Care Unit (PICU)儿科重症室surgical Intensive Care Unit (SICU)外科重症室Medical abministration dept. 医务科personnel dept. 人事科security section 保卫科眼科类英语翻译:阿托品atropine 安定diazepam爱滋病acquired immunodeficiency syndrome 安全守则safety regulationsb掰刀片器razor blade breakers 白斑leucoma白内障cataract 白内障囊内摘出术(ICCE)intracapsular cataract extraction白内障囊外摘出术ECCE 白内障手术后创口裂开wound leak after cataract surgery白内障手术术前用药premedication for cataract surgery 白内障术后护理post-operative care for cataract surgery斑翳macula (corneal scarring)包眼patching of eye包装箱packing crates 暴露性角膜炎exposure keratitis杯-盘比cup/disc ratio 鼻泪管阻塞naso-lacrimal duct obstruction毕妥斑Bitot's spots 闭角型青光眼angle closure glaucoma闭角型青光眼angle closure glaucoma 变性degeneration表面解剖surface anatomy 病毒感染viral infections病史采集history-taking 玻璃体vitreous body玻璃体积血vitreous haemorrhage 玻璃体切除术vitrectomyc苍蝇flies 草药herbal remedies潮湿气候wet climates 虫叮咬insect stings出血haemorrhage 初级保健primary health care初级卫生保健primary health care 穿刺paracentesis传统疗法traditional remedies 春季结膜炎鹅卵石样改变cobblestones in vernalconjunctivitis春季卡他性结膜炎vernal conjunctivitis 刺囊吸引术discission and aspiration醋氮酰胺acetazolamide 醋氮酰胺Diamox带状光检眼镜streak retinoscopy带状疱疹herpes zoster 单纯疱疹Herbert' pits蛋白质-能量营养不良PEM, protein-energy malnutrition 倒睫trichiasis 低视力眼镜low vision spectacles 滴剂drops地理分布geographical distribution 地塞米松dexmethasone第一眼位primary position 点状角膜炎punctate keratitis碘iodine 碘苷idoxuridine电池batteries 电弧焊烧伤welder's arc burns垫睑板,用汤匙做成lid plates, made from spoons 调查surveys调节accommodation 丁烷气炉butane gas stoves对光反射light reflex 钝挫伤contusion injuriese儿科学paediatricsf发病率incidence 翻转上睑everting of eyes翻转上睑everting upper eyelid 防盲blindness prevention房角后退angle recession 房水aqueous fluid放射学radiology 非化脓性non-purulent非计划性的白内障囊外摘出术unplanned ECCE 非洲Africa肺炎双球菌pneumococcus spp. 分类法classifications分类法classifications 缝线sutures服务俱乐部service clubs 复视diplopia副交感神经拟似剂parasympathomimetics 腹泻diarrhoeag干眼dry eye 干眼症xerophthalmia干眼症xerophthalmia 干眼症的饮食治疗diet for xerophthalmia甘露醇mannitol 甘油glycerol杆体rods 感光perception of light感光器photoreceptors 钢,碳和不锈钢steel, carbon vs stainless高渗药物hyperosmotic drugs 高眼压hypertension, ocular高眼压ocular hypertension 革兰氏染色Gram's stain工业气体industrial gases 公共卫生public health公卫护士public health nursr 巩膜sclera巩膜炎scleritis 骨性眶bony orbit光感light perception 光投射projection of light光投照light projection 光学optics光学车间optical workshops 国家眼科项目national eye programmes过敏反应anaphylaxis 过敏性结膜炎allergic conjunctivitis过熟期白内障hypermature cataract 过熟期白内障Morgagnian cataract h河盲,盘尾丝虫病river blindness黑蝇simulium damnosum 红霉素erythromycin红眼red eye 虹膜iris虹膜睫状体炎iridocyclitis 虹膜麻痹iridoplegia虹膜膨隆iris bombe 虹膜切除术iridectomy虹膜切开术iridotomy 虹膜炎iritis后弹力膜Descemet's membrane 后段posterior segment后房posterior chamber 后囊下白内障posterior subcapsular cataract 后葡萄膜炎posterior uveitis 后粘连posterior synechiae护士nurse 化脓性purulent化脓性结膜炎purulent conjunctivitis 化学性烧伤chemical injuries环苯妥(一种扩瞳剂)cyclopentolate 环状切开术peritomy患病率prevalence 黄斑变性macula degeneration磺胺醋酰钠sulphacetamide 磺胺药sulphonamides回形针paperclip 混浊opacitiesj机构,资源organizations, resource 交感性眼炎sympathetic ophthalmia交通事故accidents, automobile 肌肉muscles焦距focal length 角膜瘢痕corneal scarring激惹irritation 角膜擦伤abrasions ,corneal继发性青光眼secondary glaucoma 角膜后沉着(K.P)keratic precipitates家蝇house flies 角膜结膜炎keratoconjunctivitis甲醇methyl alcohol 角膜软化症keratomalacia钾丢失potassium loss 角膜炎keratitis假芽孢菌pseudomonas spp. 角膜缘limbus间接检眼镜indirect ophthalmoscopy 角膜真菌病keratomycosis间质混浊media opacities 接触镜(隐形眼镜)contact lenses减充血剂decongestants 街区local communities检查examination 结核trberculosis检查儿童时的约束restraint for examination of children 结节切除术nodulectomy in onchocerciasis检影镜retinoscopy 结膜conjunctiva睑板tarsal plates 结膜黑色素瘤melanoma of conjunctiva睑结合膜tarsal conjunctiva 睑拉钩lid retractors结膜色素沉着pigmentation of conjunctiva 睑裂闭合不全(兔眼)lagophthalmos结膜水肿chemosis 睑裂缝合术tarsorrhaphy结膜下出血subconjunctival haemorrhage' 睑裂黄斑pingueculum结膜炎conjunctivitis 睑球粘连symblepharon睫毛cilia 睑腺glands of eyelids睫状充血ciliary flush 睑缘炎blepharitis睫状肌麻醉眼药水cycloplegic eye drops 碱水lye睫状体ciliary body 健康教育education, health睫状体分离术cyclodialysis 降眼压药hypotensive agents, ocular睫状体冷凝术cyclocryopexy 降眼压药ocular hypotensive agents 交感神经能拟似药sympathomimeticsk开睑器lid retractor开角型青光眼open angle glaucoma 抗生素antibiotics抗酸染色acid-fast stain 抗真菌剂antifungal agents科-维杆菌Koch-Weeks bacillus 克里百菌属Knives, surgical客观验光objective refraction 肯尼亚Kenya扩瞳剂miotics 扩瞳剂mydriatic eye dropsl拉钩(牵开器)retractors老视眼presbyopia 蓝多氏视力表C chart (Landoldt)泪膜tear film 泪阜caruncle泪囊炎dacrycystitis 泪器lacrimal system泪腺lacrimal gland 泪小点puncta泪小管canaliculi 泪小管炎canaliculitis类风湿关节炎rheumatoid arthritis 立体视stereopsis利多卡因lidocaine 裂隙灯检查slit lamp examination淋病gonorrhoea 淋菌性结膜炎gonococcal conjunctivitis淋球菌gonococcal 鳞状细胞癌squamous cell carcinoma流行病学epidemiology 流行病学家epidemiologists流行性出血性结膜炎epidemic haemorrhagic conjunctivitis 漏leaks 颅内肿瘤intracranial mass 颅神经麻痹cranial nerve palsy滤过性手术filtering surgery 氯霉素chloramphenicolm麻风leprosy 麻疹measles麻疹疫苗接种vaccination for measles 麻醉,表面,局部anaesthesia, local, topical 麦粒肿hordeolum 脉络膜choroid脉络膜视网膜炎chorioretinitis 脉络膜脱离choroid separation盲人定义blindness classification 毛果芸香碱pilocarpine梅毒lues, syphilis 梅毒syphilis媒介控制vector control 面对面视野粗试法cross-confrontation field testingn缪勒肌(平滑肌)Müller's muscles木醇wood alcohol 内翻entropion内斜视esotropia 内眼检查internal ocular examination奈瑟氏淋球菌Neisseria gonorrheae 囊膜capsule囊镊capsule forceps 尿素urea尿用于传统疗法urine as traditional remedy 牛眼buphthalmos,ox eye盘尾丝虫病onchocerciasis盘尾丝虫性脉络膜炎choroiditis in onchocerciasis 泡沫床垫foam mattresses培训初保人员training of primary health care workers 膨胀期白内障intumescent cataract皮肤结节skin nodules 皮质类固醇corticosteroids, steroids皮质类固醇steroids 破伤风预防tetanus prevention葡萄膜uveal tract 葡萄膜炎uveitis葡萄球菌Staphylococcus spp. 葡萄肿staphylomaq气候climates 汽车motor vehicles汽车头灯automobiles 汽炉(消毒器械用)gas stoves, for sterilizing instruments 器械instruments 器械消毒sterilization of instruments前弹力膜Bowman's membrane 前段anterior segment前房anterior chamber 前房穿刺paracentesis of anterior chamber前房盥洗irrigation of anterior chamber 前房积脓hypopyon前房积血hyphema 前房角镜检查gonioscopy前粘连anterior synechiae 浅前房shallow青光眼glaucoma 青霉素penicillin氢氧化钙calcium hydroxide 氢氧化钾potassium hydroxide庆大霉素gentamicin 穹隆部fornices球后神经阻滞retrobulbar nerve block 驱逐性出血expulsive haemorrhage 驱逐性脉络膜出血expulsive choroidal haemorrhage 屈光refraction屈光不正ametrapia,refractice errors 屈光度(D)dioptre全科医生clinical officers 全葡萄膜炎panuveitisr热带气候tropical climates日光sunlight热烧灼thermal cautery人工晶体植入术intraocular lens implants人工泪液artificial tears人工晶体artificial intraocular lenses乳头papillae弱视amblyopia,lazy eyes噻吗心安timolol maleate (Timoptic)三级医院tertiary hospitals散光astigmatism沙眼trachoma沙眼瘢痕scars in trachoma 沙眼的社区控制计划community control programmers for trachoma沙眼分期法grading system for trachoma 沙眼滤泡follicles in trachoma沙眼衣原体Chlamydia trachomatis筛查screening上睑提肌levator palpebrae superioris muscles上斜视hypertropia烧伤burns 烧灼术cautery社区communities, local肾上腺素adrenaline,epinephrine狮子会Lions' Clubs石油进眼petrol in eyes世界卫生组织World Health Organization视杯cup, optic视觉残疾定义(WHO)visual disability, definition视觉神经通道neural pathways for vision视觉通路pathways for vision视觉障碍,分类(WHO)visual impairment, classification视力visual acuity 视乳头水肿papilledema视神经optic nerve视神经萎缩optic atrophy视网膜retina 视网膜变性degeneration of retina视网膜脱离detachment of retina 视像不等aniseikonia视野visual fields 视野检查perimetry试镜匣trial lens sets适宜技术appropriate technology嗜血菌属Haemophilus spp手法挤压manual expression手术surgery手术标志landmarks, anatomical手术放大镜operating loupes手术光源light source for surgery手术营地camps surgical手术用头架headrests, surgical输淋氏管Schlemm's canal术前护理pre-operative care树枝状角膜炎dendritic keratitis数指finger counting双眼视觉binocular vision水,滤过water, filtering司机drivers 撕裂伤lacerations四环素tetracycline 粟粒性phlyctenulet太阳灯性角膜炎sunlamp keratitis 碳酸酐酶抑制剂carbonic anhydrase inhibitors 糖尿病diabetes mellitus 疼痛pain瞳孔pupils 瞳孔扩大,外伤性mydriasis, traumatic瞳孔扩大dilatation of pupils 瞳孔阻滞pupillary block偷针眼(麦粒肿)stys 透明质酸酶hyaluronidase托吡卡胺tropicamide 脱出prolapse脱离detachment 脱色素depigmentation脱位dislocation 脱位白内障luxated cataractw外伤injuries,trauma 外伤性瞳孔扩大traumatic mydriasis外斜视exotropia 外眼检查external ocular examination微孔滤过器millipore filters 微丝蚴microfilariae of ohchocerciasis 维生素A vitamin A 卫生服务health services卫生计划者health planner 喂奶breast feeding文盲用视力表illiterate charts 无晶体眼aphakiax吸血海绵sponges,surgical细菌培养bacterial culture细菌性角膜溃疡bacterial corneal先天性白内障congenital cataract先天性青光眼congenital glaucoma显微镜检查microscopic examination线状刀Graefe knife霰粒肿chalazion香蕉bananas消毒方法sterile technique消瘦marasmus硝酸银silver nitrate小梁切除术trabeculectomy小梁网trabecular meshwork斜视squint,strabismus新生儿newborn新生儿结膜炎neonatal conjunctivitis新生儿眼炎ophthalmia neonatorum新生血管性青光眼neovascularity secondary glaucoma许氏眼压计Schiotz tonometers雪盲snow blindness血管翳pannus巡回眼科医疗队mobile eye unitsy压力锅消毒器械cooking pots for sterilizing instruments 压陷式眼压计indentation tonometers盐溶液saline solution眼保护罩protective eye shields眼部感染eye infections眼部检查examination of eyes眼底fundus眼底镜检查ophthalmoscopy眼垫eye pads眼睑eyelids眼介质ocular media眼镜spectacles眼科包扎员dressers, ophthalmic眼科辅助人员ophthalmic auxiliaries眼科学,公共卫生ophthalmology, public health眼科医师ophthalmologists眼眶orbit 眼轮匝肌orbicularis oculi muscle眼内金属异物metallic intraocular foreign body眼内炎endophthalmitis眼内炎症intraocular inflammation眼内异物intraocular foreign bodies眼球eyeball 眼球表面伤surface injuries to eyeball眼球穿通伤penetration injuries of eyeball眼球筋膜Tenon's capsule眼球痨phthisis bulbi眼球破裂ruptured globe眼球摘除术enucleation眼生理physiology of eye眼外肌extraocular muscles眼压测量tonometry眼压计tonometers眼罩eye shields药品的彩色编码color coding of drugs夜盲night blindness医辅人员medical auxiliaries医疗记录medical records医院hospitals 医助medical assistants乙胺嗪枸橼酸盐(抗丝虫药)diethylcarbamazine citrate 乙膦硫胆碱(缩瞳剂)echothiophate异凡曼霉素(杀寄生虫药)ivermectin (Mectizan)异物foreign bodies翼状胬肉pterygium阴虱crab louse,phthirus pubis饮食史dietary history荧光素fluorescein营养不良malnutrition营养性盲nutritional blindness营养学家nutritionists用药medications瘀斑ecchymosis预防prevention预防新生儿淋病眼的方法(1%硝酸银)Crede prophylaxis预防性眼保健preventive eye care远视眼far-sightedness , hyperopia云翳nebulaz粘连synechiae针拨术couching针孔试验pinhole test真菌性角膜溃疡fungal corneal ulcer正常眼压青光眼normal-pressure glaucoma 正视眼emmetropia蜘蛛咬伤spider bites植物vegetable matter制霉菌素nystatin致盲性沙眼blinding trachoma致盲性营养不良blinding malnutrition痣nevus中间技术intermediate technology中央视力central vision周边虹膜切除术peripheral iridectomy猪尾状探针pigtail probe主觉验光subjective refraction助产士midwives注吸器infusion-aspiration syringes锥体cones资源组织resource organizations紫外光ultraviolet light自动验光仪autorefractors自制酒distilled spirits眦canthi综合屈光检查仪phoropters。
磁材表面缺陷视觉检测方法
I
哈尔滨工业大学工学硕士研究生学位论文
Abstract
With the improvement of national economy standard, requirement for high quality, high precision and high reliability products is also increasing. The traditional testing methods can not meet the demand for quick detection of products. At the same time, the promotion of computer technology makes it possiable to extensive application of digital image processing. Therefore, the detection method of products surface, which is base on machine vision, has been popular in products quality control. In this paper, we made a research into the detection of defects in magnetic, according to the magnetic characteristics of the magnetic, we proposed the algorithm use for magnetic flaw detection and its application in magnetic-line detection system. For component orientation, we proposes an approach based pyramid edge template matching technique. By selecting the optimal pyramid metric function, the result meet robustness requirements and positioning results for nonlinear, linear light, feature missing, defaced, etc. insensitive. Through choicing the vector as well as improving search termination conditions, sparse matrix drop Vega speed computation, we propose four optimization search strategy to accelerate the process of matching operation. We also design the DXF file analysis tool, the shape parameter can be read directly from the Autocad file, it will be more convinient to adjustment parameter. Experiments show that the method can resist nonlinear light, partly obscured, defaced with strong robustness, positioning time will less than 50ms. In order to extraction the texture feature and remove the texture of the magnetic. Extraction and filtering in the texture, we compares the two integrated filtering methods, the first one is the frequency domain of the image band filter structure, by removing the vertical direction along the grain direction of the spectrum, we can remove the texture object airspace; The second method is building anisotropic filter to remove the texture, at the same time to keep edge of defects. Experimental results show that the effect is superior to the anisotropic filtering in frequency domain filtering has a better results. In order to separate defective area and classification. We firstly extracted gray value, standard deviation and entropy from the texture regions, and then the defect area
vision pro介绍作文
vision pro介绍作文英文回答:As a user of Vision Pro, I can confidently say that it is a fantastic tool for enhancing productivity and efficiency in my daily work. Vision Pro is a powerful software that allows me to easily create and manage tasks, set reminders, and track progress on various projects. One of the key features that I find extremely helpful is the ability to prioritize tasks based on deadlines and importance. This helps me stay organized and focused on what needs to be done first.Another great aspect of Vision Pro is the collaboration functionality. I can easily share tasks and projects with my team members, assign responsibilities, and track their progress in real-time. This has greatly improved communication and coordination within my team, leading to better results and outcomes.Furthermore, Vision Pro offers customizable templates and workflows that can be tailored to suit my specific needs and preferences. Whether I'm working on a marketing campaign, a product launch, or a client presentation, I can easily adapt the software to meet the requirements of the project at hand.In addition, the user interface of Vision Pro is clean, intuitive, and user-friendly. I appreciate how easy it is to navigate through the different features and tools, making it a seamless experience for me to manage my tasks and projects efficiently.Overall, Vision Pro has become an indispensable tool in my daily workflow, helping me stay organized, focused, and productive. I highly recommend it to anyone looking to streamline their work processes and achieve better results in their projects.中文回答:作为Vision Pro的用户,我可以自信地说它是一个在我的日常工作中提高生产力和效率的绝佳工具。
视频质量评价方法综述
736计算机辅助设计与图形学学报2006焦并将其归结为基于HVS(humanvisualsystem)生理特征和基于结构失真的两大类方法,对视频质量评价过程中用到的多种方法进行了总结和评论,并通过实验进行了效果验证.最后总结和预测了视频质量评价技术发展的几个方向.1视频质量主观评价视频质量主观评价凭感知者主观感受评价视频对象的质量,包括视觉信息的录入系统,即人眼成像系统;视频信息处理系统,即人脑对视觉信息的加工.成像系统与信息处理系统2部分互相结合,对视频评价的结果产生显著的影响,目前尚没有合适的数学模型对其进行精确的刻画.主观质量评价一般采用连续双激励质量度量法(doublestimuluscontinuousqualityscale,DSCQS),对任一观测者连续给出原始视频图像和处理过的失真图像,由观测者根据主观感知给出分值.ITu—T(InternationalTelecommunicationUnion—Telecom—munication)已经发布相关标准BT一510,就主观质量评价过程中的测试序列、人员、距离以及环境做了详细规定,并综合考虑了影响视觉感知的分辨率、白平衡等因素【7J.中国国标GB7401—87中对有线电视广播系统图像质量评价进行了规定,给出了电视图像主观质量的5级打分标准,并对伴音图像的质量评价进行了规定[8J.主观质量评价方法需针对多个视频对象进行多次重复实验,耗时多、费用高,难以操作.目前,有学者就主观质量评价体系的组成环节进行改进研究.Richardson通过在主观评价过程中引入测试者反馈信息来加快主观质量评价过程旧J.在主观质量评价过程中,给每个测试者连续的视频剪辑和一个输入控制设备,通过一个显示滑块实现与视频播放的交互.该方法不必中断视频剪辑,节省了测试时间及成本.就测试人员而言,主观质量评价原则上要求由不具有先验经验的非评价专家对待测对象打分,但观测者看到相同图像以后,实际上已经对同一个图像及相关的失真图像都建立了部分的先验信息.相对于主观质量评价,客观质量评价具有操作简单、成本低、易于实现特点,它已经成为视频图像质量评价研究的重点,这也是本文综述的重点.在实际视频通信中,更倾向于主观评价方法与客观评价方法的结合,如利用主观评价结果对客观质量评价模型结果进行校正.2视频质量客观评价目前,视频质量客观评价一般是通过模拟HVS的生理特征建立视觉感知模型,并将模型的输出值作为质量的评价或失真的度量,研究集中在如何提高模型输出与主观评价结果的相关性.Wang自2002年起提出,并在此基础上发展了一种基于结构失真的视频质量客观评价方法,该方法对静态图像质量评价取得了较好的效果,颇具潜力[2’10].2.1峰值信噪比和均方误差在视频编解码过程中,目前一般采用峰值信噪比(peaksignalnoiseratio,PSNR)或均方差(meansquareerror,MSE)衡量视频序列的失真度,即^ff2PSNR=1019(淼sE)(1)1旦MSE=壶∑(zi一互i)2(2)F1其中,zi和五分别为原始图像与重建图像中对应的像素值,N2为N×N图像中的总像素数.PSNR和MSE忽略了图像内容对人眼的影响,不能完整地反映出图像的质量.分析式(1)和(2)可以看出,相对同一个原始信号以(i,J),相同PSNR或MSE的2个失真信号五l(i,J)和五2(i,J)可能是不同的.式(2)中,若Ia(i,J)一a1(;,歹)I=la(i,J)一n2(;,歹)I,贝0五1(i,J)=五2(i,J),亘览五1(i,歹)+d2(i,J)=2a(i,J).MSE相同,但五1(i,J)和a2(i,J)并不一定相同,在人眼看来也可能会相差甚远.图1中,2个失真信号信号1和信号2分别与原始信号进行MSE计算的结果是相同的;但在人眼看来,信号1要比信号2更接近原始信号.图1不同失真信号的均方差计算5期佟雨兵等:视频质量评价方法综述739S(z,Y)=f(Z(.27,Y),C(z,Y),S(z,y))(3)其中,S(X,Y)为失真信号与原始信号之间相似性的测量函数,用来度量失真度;f(·)是整合函数;z(z,y)是亮度比较函数,c(z,y)是对比度比较函数,S(z,Y)是结构比较函数,3个函数相对独立,满足对称性、边界性和最大值唯一性[24|.1(x,y)=考粤tz兰,C1=(K1L)2(4)pz十Y十L/1c(z,y)=i戮,c2=(K:L)2(5)丸川=吾赠(6)其中,盯删=丙与∑(z。
基于视觉的旋翼无人机地面目标跟踪(英文)
I. INTRODUCTION UAV is one of the best platforms to perform dull, dirty or dangerous (3D) tasks [1]. UAV can be used in various applications where human is impossible to intervene. It greatly expands the application space of visual tracking. Research on the technology of vision based ground target tracking for UAV has been a great concern among cybernetic experts and robotic experts, and has become one of the most active research directions in UAV applications. Currently, researchers from America, Britain, France and Sweden are on the cutting edge in this field [2]. Typical visual tracking platforms for UAV include Scan Eagle, GTMax, RQ-11, RQ-16, DragonFly, etc. Because of many advantages, such as small size, light weight, flexible, easy to carry and low cost, rotor UAV has a broad application prospect in the fields of traffic monitoring, resource exploration, electricity patrol, forest fire prevention, aerial photography, atmospheric monitoring, etc [3]. Vision based ground target tracking system for rotor UAV is such a system that gets images by the camera installed on a low-flying rotor UAV, then recognizes the target in the images and estimates the motion state of the target, and finally according to the visual information regulates the pan-tilt-zoom (PTZ) camera automatically to keep the target at the center of the camera view. In view of the current situation of international researches, the study of ground target tracking system for
关于eva的英语作文
关于eva的英语作文Title: The Evolution and Impact of EVA in Modern Business Practices.In the ever-evolving landscape of business practices, the concept of Economic Value Added (EVA) has emerged as a pivotal metric for measuring the true economic performance of an organization. Originating from the field of finance, EVA has transformed the way companies assess their profitability and strategic decision-making. This essay delves into the origins, evolution, and profound impact of EVA on modern business practices.Origins of EVA.EVA was first introduced in the early 1980s by Stern Value Management, a consulting firm founded by Joel Stern and Bennett Stewart. Their vision was to create a financial performance measure that captured the true economic profit of a company, taking into account the cost of capital. EVAis essentially the net operating profit after taxes (NOPAT) minus the capital charge, which represents the cost of the capital employed in the business. This approach aims to provide a more accurate reflection of a company's profitability, as it accounts for the return on investment required by shareholders.Evolution of EVA.Since its inception, EVA has undergone significant evolution. Initially, it was primarily used by large corporations to evaluate business units and make strategic decisions. However, over time, its popularity and applicability have expanded to a wide range of organizations, from smalland medium-sized enterprises to.。
coco数据集 评估指标 map

coco数据集评估指标 mapThe COCO (Common Objects in Context) dataset is a widely used benchmark for object detection, segmentation, and captioning tasks in computer vision. When it comes to evaluating the performance of models trained on this dataset, the mean average precision (mAP) is a key metric that is often used. mAP is a measure of the accuracy of an object detection model, taking into account both the precision and recall of the model's predictions. It provides a single, easy-to-understand value that summarizes the overall performance of the model across all classes and all levels of confidence.One of the main advantages of using mAP as an evaluation metric for the COCO dataset is its ability to capture the trade-off between precision and recall. This is important because in object detection tasks, it is crucial to not only correctly identify the presence of an object but also to accurately localize it within the image. By considering both precision and recall, mAP provides acomprehensive assessment of the model's performance in this regard.From a practical standpoint, mAP is also useful for comparing the performance of different models or algorithms on the COCO dataset. Since mAP provides a single numerical value that summarizes the overall performance, it allowsfor easy and direct comparisons between different approaches. This is particularly valuable in research and development, where the goal is often to identify the most effective techniques for object detection and segmentation.However, it is important to note that mAP is not without its limitations. One potential drawback is that it does not provide detailed insights into the specific strengths and weaknesses of a model. For example, a model with high mAP may still perform poorly on certain classes or under specific conditions. In such cases, additional analysis beyond mAP may be necessary to fully understand the model's performance.Furthermore, the calculation of mAP can be sensitive tocertain parameters, such as the threshold for defining a true positive detection. This means that small changes in these parameters can lead to significant differences in the reported mAP, making it important to carefully consider the specific settings used when interpreting and comparing mAP values.In conclusion, while mAP is a valuable and widely used evaluation metric for the COCO dataset, it is important to consider its limitations and to supplement its use with additional analyses when necessary. By doing so, researchers and practitioners can gain a more comprehensive understanding of the performance of object detection and segmentation models on this important benchmark.。
KODAK VISION3 250D色彩负片商品介绍说明书
KODAK VISION3 250DAll the beauty of daylight. Consistent quality performance.KODAK VISION3 250D Color Negative Film raises the bar for outdoor shooting. Incorporating the unparalleled performance of KODAK VISION3 500T in a medium-speed, daylight-balanced emulsion, you get the freedom and creativity of daylight without compromising on quality. Outstanding performance in the extremes of exposure, reduced grain in the shadows and the ability to push the boundaries of underexposure with stunning results. KODAK VISION3 250D performs on set and in the suite, letting you move faster when you’re shooting and pull out more of the highlight detail in post.With the increased flexibility, control, image quality and archival stability you’ve come to expect from KODAK VISION3 film, the KODAK VISION3 250D pushes the possibilities of shooting on film, wherever you are.KODAK VISION3 250D. Your vision is always evolving. Ours is too.Daylight(5500 K)None250 Metal Halide None250H.M.I.None250 KINO FLO KF55None250Tungsten (3000 K)WRATTEN2 OpticalNo. 80A64Tungsten (3200 K)WRATTEN2 OpticalNo. 80A64KINO FLO KF29WRATTEN2 OpticalNo. 80A64KINO FLO KF32WRATTEN2 OpticalNo. 80A64Fluorescent, Warm White †WRATTEN2 CC20M+ CC05R160Fluorescent,Cool White †WRATTEN2 CC40R160* These are approximate corrections only.† T hese are starting-point recommendations for trial exposures.If the kind of lamp is unknown, a KODAK WRATTEN2 ColorCompensating Filter CC20M + CC10B can be used with anexposure index (EI) of 160.BaseAcetate safety base with rem-jetbacking.Darkroom RecommendationsDo not use a safelight. Handleunprocessed film in total darkness.ProcessingECN-2StorageStore unexposed film at 13°C (55°F) orlower. For storage of unexposed filmlonger than 6 months, store at –18°C(0°F). Process film promptly.Exposure IndexDaylight (5500K)—250; Tungsten—64(with KODAK WRATTEN 2 Gelatin FilterNo. 80A)Laboratory Aim DensityTime negative originals relative toLaboratory Aim Density (LAD) Control Filmsupplied by Eastman Kodak Company.More information about LAD and DigitalLAD is available online at www.kodak.com/go/LADColor BalanceThis film is balanced for exposure withdaylight illumination (5500K). For otherlight sources, use the correction filtersin the table to the right.ReciprocityNo filter corrections or exposureadjustments for exposure times from1/1000 of a second to 1 second. Ifyour exposure is in the 10-secondrange, increase exposure 1 stop anduse a KODAK WRATTEN 2 Filter, ColorCompensating CC10R.IdentificationAfter processing, the Kodak internalproduct code symbol (EN), productcode number 5207, emulsion/rollnumber identification, and EASTMANKEYKODE Numbers are visible along thelength of the film.GrainThe perception of graininess of anyfilm depends on scene content,complexity, color, and density. InKODAK VISION3 250D Color NegativeFilm 5207/7207, the measuredgranularity is exceptionally low.SharpnessThe perceived sharpness of any filmdepends on various components ofthe motion picture production system.Camera and projector lenses, filmprinters, and other factors play a role,but the specific sharpness of a filmcan be measured and charted in theModulation Transfer Curve.KODAK VISION3 250DColor Negative Film 5207/7207STANDARD PRODUCTS AVAILABLE*CAT NO.Format andSpecification No. Length in meters(feet)Core DescriptionPerforations/PitchMetric (imperial)MOQ FTO**743718965 mm SP332122 (400)P Emulsion In KS-4740 (KS-1866)1 106512765 mm SP332152 (500)P Emulsion In KS-4740 (KS-1866)15Yes 122763665 mm SP332305 (1000)P Emulsion In KS-4740 (KS-1866)15Yes 100178335 mm SP71861 (200)U Emulsion In BH-4740 (BH-1866)30Yes 898690335 mm SP718122 (400)U Emulsion In BH-4740 (BH-1866)1 890393235 mm SP718305 (1000)U Emulsion In BH-4740 (BH-1866)1138268816 mm SP45530 (100)R-90 100-ft. spool Emulsion InWinding B1R-7605 (1R-2994)1867626416 mm SP457122 (400)T Emulsion InWinding B1R-7605 (1R-2994)1* Availability may vary by location. Contact your local Kodak representative for additional information.** This product is available as Finish-to-Order (FTO) in various other standard roll lengths and formats. Sold only in specific minimum order quantities or multiples of the minimum order quantities; non-returnable; US and Canada delivery time of 3 weeks from receipt of purchase order. Other restrictions may apply.Notice: While the data presented are typical of production coatings, they do not represent standards that must be met by Kodak.Varying storage, exposure, and processing conditions will affect results. The company reserves the right to change and improve product characteristics at any time.©Kodak, 2018. Kodak, Eastman, Keykode, and Vision, Wratten are trademarks. H-1-5207 180929For more information: /go/motion Sales offices: /go/salesoffices Lab directory: /go/findlab。
S32K 培训资料 单片机介绍
KFA512 Block Diagram
High performance • ARM Cortex M4 up to 120MHz w FPU
• eDMA from Qorivva family
System
PMC 2.7 - 5.5V Ext Osc (4 - 40MHz) Int R/C OSC (~48MHz 1%) Int LP Osc (128KHz)
64-128kB, LIN, CAN, 32-64pin
Entry
KEA64 M0+ 40MHz
16-64kB, LIN, 32-64pin
KGA 32 M0+ 48MHz
16-32kB, LIN, 20-48pin 90nm 180nm
KEA8 M0+ 48MHz
8kB, LIN, 16-24pin
•
•
Targeting ASIL-B applications
Security
Key Software Features
• • • • •
KDS (Kinetis Design Studio)
Autosar MCAL and OS Non-autosar Low-Level Drivers Model-based design support Extensive 3rd party offering
TM
Confidential and Proprietary
6
The Solution
•
Offering products scaled to vehicle safety function complexity from across the Freescale product portfolio
六西格玛管理概述(英文版)
Copyright 1995 Six Sigma Academy, Inc.
Six Sigma - Performance Target
Sigma Long-Term Yield Standard
Issue
Classical
Outlook Decision Making Design Aim Organization Training Chain of Command Direction Goal Setting People Control Improvement
Short Term Intuition Performance Company Authority Luxury Hierarchy Seat of Pants Realistic Perception Cost Centralized Automation
© 1994 Six Sigma Academy
Is Your Leadership On Board?
Six Sigma only works when Leadership is passionate about excellence and willing to
change.
• Fundamentals of Leadership
SERVICE
DESIGN
ADMIN. QA
6 Sigma Methods
PURCH.
Marketing
MFG.
MAINT.
As long as there is a process that produces an output, whether it is a manufactured product, data, an invoice, etc…, we can apply the Six Sigma Breakthrough Strategy. For these processes to perform
深度相机在计算机视觉与图形学上的应用研究
深度相机在计算机视觉与图形学上的应用研究向学勤;潘志庚;童晶【期刊名称】《计算机科学与探索》【年(卷),期】2011(005)006【摘要】An increasing number of applications depend on accurate and fast 3D scene analysis, such as geometry reconstruction, collision prevention, mixed reality, and gesture recognition. The acquisition of a range map by imagebased analysis or laser scan techniques is still time-consuming and expensive. Emerged as an alternative device to measure distance, depth camera enjoys some advances, e.g., lower price and higher photo speed, that have not be made in traditional 3D measuring systems. Recently, significant improvements have been made in order to achieve low-cost and compact depth camera devices that have the potential to revolutionize many fields of research, including computer vision, computer graphics and human computer interaction (HCI). These technologies are also starting to attract many researchers working for academic or commercial purposes. This paper gives an overview of recent developments in depth camera technology and discusses the current state of the integration of this technology into various related applications in computer vision and computer graphics.%越来越多的应用如几何重建、碰撞检测、混合现实、手势识别等,都依赖于对三维场景准确且快速的分析.通过基于图像的分析或者激光扫描技术来获取场景的深度图,其代价高昂且十分耗时.作为距离测量中一种可替代的设备,深度相机拥有传统的三维测量系统所不具备的一些优点,如较低的价格以及较高的拍摄速度等.最近出现了一些小巧低廉的深度相机设备,这将给计算机视觉、计算机图形学、人机交互等领域带来一系列革命性的变化,吸引了众多研究者的关注.对深度相机最新发展情况进行了介绍,并报告了深度相机在计算机视觉、计算机图形学中的应用现状.【总页数】12页(P481-492)【作者】向学勤;潘志庚;童晶【作者单位】浙江大学计算机辅助设计与图形学国家重点实验室,杭州310058;浙江大学计算机辅助设计与图形学国家重点实验室,杭州310058;浙江大学计算机辅助设计与图形学国家重点实验室,杭州310058【正文语种】中文【中图分类】TP391.41【相关文献】1.深度卷积神经网络在计算机视觉中的应用研究综述 [J], 卢宏涛;张秦川2.深度卷积神经网络在计算机视觉中的应用研究综述 [J], 王琳;赵耀;余静华;陈曦3.深度对话·相机追问:让数学课更显几何味——李庾南老师“图形的旋转”课例赏析 [J], 邓厚波4.深度对话·相机追问:让数学课更显几何味——李庾南老师“图形的旋转”课例赏析 [J], 邓厚波5.巧用图形计算器帮学生轻松突破综合题难点――例谈图形计算器在初中数学教学上的辅助应用 [J], 张欣因版权原因,仅展示原文概要,查看原文内容请购买。
全新心理学英文词汇
A fair days workA reactionA type personalityAAAAAabacusabandonment of aged abandonment reaction abandonment threat abarognosiaabaseabasementabasiaAbbe condenserabbe effectabbreviated drawing abbreviated formulaABC of reaction time ABC ABC of sense impression abderiteabdomenabdominal breath abdominal ganglion abdominal reflex abdominal wallabducent nerveabductionabductorabecedarianabepithymiaaberglaubeaberranceaberrantaberrant behavioraberrationaberration of lightaberration rateaberrometerabhorabhorrenceabhorrent to reasonabhorrerabient behaviorabient driveabient responseabilityability characteristicsability compensationability developmentability distributionability groupability groupingability levelability of cognizanceability of imaginationability of managersability of memoryability of taking criminal responsibility ability of thinkingability ratingability taskability testability trait abiogenesisabiogenistabionergy abiophysiologyabiosisabioticabiotic surround abirritationAbklingenablationablazeablepsiaablushablutomaniaabmodalityabnegateabnegationabnerval current Abney effectabnormalabnormal behavior abnormal child abnormal condition abnormal curve abnormal distribution abnormal endabnormal fertilization abnormal fixation abnormal habitude abnormal impulse workabnormal metabolism abnormal mindabnormal mind of convict abnormal personality abnormal phenomena abnormal psychology abnormal results abnormal sensation abnormal series abnormal sexual behavior abnormal sexuality abnormal spoilage abnormal time abnormalityabnormityabolition of reflex abominateabominationabominatorabortabortionabortiveabouliaaboulomaniaabove threshold abreactionabridged learning abridgment of response abridgment of table abrogateabruptionabscissaabscissa axisabscissionabsenceabsence of mindabsence of restrictionsabsent behaviorabsent responseabsenteeismabsentiaabsentia epilepticabsolute activityabsolute advantagesabsolute and relativeabsolute atmosphereabsolute beingabsolute brilliance limen absolute certitudeabsolute chanceabsolute choiceabsolute cognitive consciousness absolute conceptabsolute constructionabsolute differenceabsolute discriminationabsolute dispersionabsolute diversityabsolute egoabsolute electrostatic unit absolute equalityabsolute errorabsolute evaluation absolute existence absolute extremesabsolute fieldabsolute freedomabsolute grading standards absolute humidityabsolute ideaabsolute identityabsolute idiocyabsolute impression absolute intelligence absolute judgmentabsolute knowledge absolute lethal genes absolute light threshold absolute limenabsolute localization absolute luminosity absolute magnitude absolute mass unit absolute measurement absolute memoryabsolute mindabsolute moralityabsolute motion parallax absolute nothingabsolute notionabsolute numberabsolute pitchaposterioriAQCommunication capability index hypererosiaOAPophidiophiliaophidiophobeophidiophobiaophtalmodonesis ophthalmencephalon ophthalmocopia ophthalmodiastimeter ophthalmograph ophthalmography ophthalmologicophthalmologic examination ophthalmologyophthalmometer ophthalmophantom ophthalmoreaction ophthalmoscope ophthalmoscopy ophthalmostasisophthalmostat ophthalmotonometer ophthalmotrope ophthalmotropometer ophthalmotropometryopiateopiate receptoropinionopinion leaderopinion pollopinion pollingopinion surveyopinion testopinionableopinionaireopinionalopinionateopinionationOpinionation Scaleopinionativeopinionatoropiomaniaopiomaniacopisthencephalonopisthoporeiaopisthotonosopiumopium denopligationOppel Kundt figureOppel's illusionopponent color theoryopponent process theoryopponents theory of color vision opportune confabulationopportune moment for interrogation opportunityopportunity classopportunity factoropportunity to performopposites test opposites viewpoint oppositionopsialgia opsigenesopsinopsiometer opsomaniaopsonic action optesthesia opthalmusopticoptic angleoptic aphasiaoptic apraxiaoptic atrophyoptic axisoptic canaloptic celloptic centreoptic chiasmaoptic cupoptic discoptic glandoptic grooveoptic lobeoptic nerveoptic nerve fiber optic nystagmus optic papillaoptic radiationoptic segmentoptic stalkoptic thalamusoptic tractoptic typeoptic zoneoptica axisopticaloptical aberrationoptical activityoptical aidoptical alexiaoptical allachesthesiaoptical antimeroptical artoptical axisoptical centeroptical character recognition optical communicationoptical computeroptical correctionoptical dispersionoptical frequencyoptical illusionoptical imageoptical instrumentoptical isomerismoptical landing systemoptical lanternoptical measurementoptical mechanical systemoptical microscopeoptical parallaxoptical phenomenaoptical rangeoptical rangefinderoptical readeroptical revolving power optical rotationoptical systemoptically activeopticociliaryopticokineticopticokinetic reflex opticokineticsoptimaloptimal allocationoptimal arousal level optimal arousal level theory optimal choiceoptimal coloroptimal conditionoptimal controloptimal control model optimal decisionoptimal decodingoptimal functioningoptimal groupingoptimal illuminationoptimal movementoptimal performanceoptimal personality traits, optimal propertyoptimal proportionoptimal ratiooptimal samplingoptimal sampling plan optimal scalingoptimal seeking method optimal sequence trainer optimal state of performance optimal stimulationoptimal strategyoptimal work spaceoptimeteroptimismoptimizationoptimizeoptimizing modeloptimumoptimum cd ratiooptimum conditionoptimum controloptimum decision making optimum degreeoptimum estimateoptimum loadoptimum rangeoptimum selectionoptimum speedoptimum stateoptimum state of performance optimum strategyoptimum temperatureoption experimentoptionaloptional altruistic suicide optional routeoptional variantoptionsoptoblastoptogramoptogravit illusion optogyral illusion optokinetic response optomeninxoptometeroptometryoptomotoroptomyometeroptophoneORoraora serrataoracyoral aggressionoral anxietyoral arithmeticoral behaviororal cavityoral characteroral communicationoral complexoral contraceptive oral dependence oral driveoral erotismoral examination oral fixationoral incorporation oral languageoral literature oral methodoral optimismoral orientation oral personality oral pessimismoral phaseoral primacyoral readingoral reportoral sadismoral sensationoral sensory stage oral stageoral temperature oral testoralismorality orangoutang orangutanorbOrbeli phenomenonOrbison illusionorbitaorbitofrontal cortex orderorder codeorder disorder transition order effectorder of birthorder of dominanceorder of meritorder of merit method order of merit scale order statisticsordered alternative ordered change theory ordered metric scale ordered recallorderingordering relation orderlinessordinal dispersionordinal interaction ordinal measureordinal positionordinal scaleordinal variableordinaryordinateorectic processesOrestes complex oreximaniaorexisorganorgan inferiority organ languageorgan neurosisorgan of Cortiorgan of equilibration organ of language organ of locomotion organ of special sense organ of speechorgan of surveyorgan of tasteorgan of visionorgan sensationorgan sensuumorgan specificity organ transplantation organaorganicorganic amnesia organic anxiety organic brain damage organic brain disorder organic brain syndrome organic deafness organic dementia organic disorder organic factororganic feeling organic imitationorganic melancholiaorganic memoryorganic modelorganic psychosisorganic repressionorganic rulesorganic selectionorganic sensationorganic theory of organization organic theory of societyorganic therapyorganic traitorganic variableorganicismorganismorganismal theoryorganismic ageorganismic experienceorganismic psychologyorganismic theoryorganismic variableorganizationorganization behaviororganization chartsorganization cultureorganization developmentorganization development intervention organization effectorganization manorganization of animal society organization of dataorganization structureorganization theoryorganizational behaviorOrganizational Behavior and Human Decision Processes organizational changeorganizational climateorganizational commitmentOrganizational Commitment Scaleorganizational communicationorganizational crisisorganizational cultureorganizational departmentalizationorganizational designorganizational developmentorganizational diagnosisorganizational effectorganizational effectivenessorganizational factororganizational goalorganizational identificationorganizational maintenanceorganizational matrixorganizational mergerorganizational objectiveorganizational planningorganizational politicsorganizational processorganizational productivityorganizational psychologyorganizational reformorganizational shape organizational span of control organizational stress organizational structure organized criminal gang organized fermentorganized playorganized supplementary play organized wholeorganizerorganizingorganogenesisorganogenicorganolepticorganoleptic research organologyorganonorganon auditusorganon gustusorganon olfactusorganon visusorganonomyorganopathyorganotherapyorganphysiologyorganuleorganum gustatoriusorganum olfactoriumorganum sensuumorgasmorgasmic dysfunctionorgasmphaseorgyorientating reflexorientationorientation disturbanceorientation motion detector orientation of consuming requirement orientation of motor learning orientation of purchasing power orientation perceptionorientation reactionorientation reflexorientation responseorientation trainingorientational trainingorienting reflexorienting responseorienting response in animal orienting taskoriginorigin of consciousnessorigin of infants imaginationorigin of infants self consciousness origin of internal speechorigin of languageorigin of lifeorigin of mindorigin of neonatal attentionorigin of neonatal memoryorigin of speciesorigin of speechorigin of thinkingorigin of volitional movementoriginaloriginal civilizationoriginal dataoriginal descriptionoriginal groundoriginal learningoriginal natureoriginal qualityoriginal recordoriginal surveyoriginalityoriginality of thinkingoriginateoriginationoriginatorOrleans Hanna Algebra Prognosis Test Orleans Hanna Geometry Prognosis Test ornithineornithine decarboxylaseornithophobiaorphanorphanageorphanhoodorthergasiaortho raterortho sleeporthobiosisorthocephalyorthochoreaorthodoxorthodox psychoanalysis orthodoxsleeporthodromicorthodromic conduction orthogenesisorthogenicsorthogonal arrayorthogonal comparison orthogonal component orthogonal contrast orthogonal factororthogonal factor model orthogonal polynomial orthogonal rotation orthogonalityorthographic deep hypothesis orthographyorthomolecular psychiatry orthomutationorthophonyorthophoriaorthophreniaorthopsychiatryorthosisorthostatism orthosympatheticorthotonosorthropsiaoscillationoscillogramoscillographoscillometeroscillometryoscitancyOseretsky Tests of Motor Proficiency Osgoods surfaceosmaticosmesthesiaosmoceptorosmologyosmometerosmometric thirstosmonosologyosmoreceptorosmoscopeosmosisosmotic thirstosmylosphresiologyosphresiometerosphresisosphreticossicleossificationossifyOSTosteoanesthesiaosteogenesisosteologyOstwald color circleOstwald color pyramidOstwald color systemotaphoneother directedother perceptionother suggestionoticOtis Lennon Mental Ability TestOtis Quick Scoring Mental Ability TestOtis Self Administering Tests of Mental Ability otoconiteotoganglionotographyotohemineurastheniaotolaryngologyotolithotolithiasisotologyotomyastheniaotoneurastheniaotoneurologyotopathyotophoneotopiesisotorhinolaryngologyotorhinologyotosalpinxotosisOTUout groupout of balanceout of body experienceout of controlout of employout of stockout patientout patient treatment outbreakoutbreedingoutcomeoutcome goaloutcome researchouter causeouter directedouter directed behaviorouter earouter hair cellsouter nuclear layerouter plexiform layerouter segmentoutflow theoryoutgroupoutingoutline making in composition outlookoutlook on lifeoutnessoutputoutput of learningoutrageoutward manifestation outward senseoutward thing outwardnessoval windowovarian obesity ovariumovaryover adaptationover anxious reaction over arousalover compensationover constancyover developmentover exerciseover fatigueover learningover self confidence over the counter drugs overachievement overachieveroveractoverageoverall rating method overall reaction overcautionovercome overcompensation overconfidence overconfident overconstancy overcontrolled overcorrectionovercredulityovercredulousovercriticalovercrowovercrowdoverdeterminationoverdeterminedoverdevelopoverdoseoveremphasizeoverestimationoverexcitationoverexcitementoverextensionoverfatigueoverfeedingoverflow activityovergeneralizationovergrowthoverheard communicationoverinclusionoverinclusive thinkingoverindulgenceoverinhibitionoverjoyedoverjustificationoverjustification effectoverlapoverlappingoverlapping control of eating and drinking overlearningoverlearning reversal effect overloadoverload imitationoverload modelovermanovermanyovermasterovermaximalovermotivationoverpersuadeoverpopulationoverproductionoverproductivityoverprotectionoverrateoverreactionoverregulationoverresponseovershadowingoverstimulationoverstocking of commodities overstrainoverstrain of excitatory process overstrain of inhibitory process overstrain of nervous process overtovert behaviorovert crimeovert cultureovert homosexualityovert intrusionovert needovert responseovertimeovertoneovertrainingovertraining reversal effect overweightoverwrokoverwroughtoverzealousovigenesisovulationovumownownerownerlessownershipownguardownnessOxford indexoxidative enzymeoxyacoiaoxyblepsiaoxycodoneoxyecoiaoxyesthesiaoxygenoxygen consumptionoxygen debtoxygen deficitoxygen demandoxygen deprivation oxygen intake oxygen intake rate oxygen lack oxygen toxicity oxygeusia oxyhemograph oxylalia oxymorphone oxynervoneoxyopiaoxyopteroxyosmiaoxypathiaoxytocinPOMSponderal growth ponesiatrics pongidae ponographponspons cerebralis pons oblongata pons varolii pontibrachium ponticpontinepontine tegmentum pontobulbar pontocerellar pontopeduncularPonzo figurePonzo illusionpooled interdependencepooled observationspooling of errorpooling procedurepoorly nourisionpoppypopular childpopular responsepopularitypopulationpopulation analysispopulation by age group population by educational level population by sexpopulation composition population controlpopulation densitypopulation distribution population effectpopulation experiment population geneticspopulation growthpopulation meanpopulation of samples population parameterpopulation pressurepopulation registerpopulation regulation population revolutionpopulation situationpopulation statisticspopulation structurepopulation studypopulation theorypopulation vital statistics,population waiting for employmentPORPorch Index of Communicative Ability in Children poriomaniapornographyporphrismusporphyropsinportentPorters lawPorteus MazePorteus Maze Testporus acusticus externusporus acusticus internuspositionposition alternation problemposition constancyposition effectposition factorposition habitposition powerposition preferenceposition reactionposition receptorposition relationposition responsepositional leaderpositionalitypositionerpositioning analysispositioning movementpositive accelerationpositive adaptationpositive after imagepositive after potentialpositive and negative cases method positive attention seekingpositive attitudepositive attitude changepositive cathexispositive conceptpositive conditioned reflex positive contrastpositive contrast of reinforcement positive correlationpositive cuepositive errorpositive feedbackpositive goalpositive heuristicpositive identitypositive incentivepositive inducementpositive inductionpositive instancepositive interactionpositive interestpositive itempositive linear relationshippositive negative ambivalent quotient positive negative conflictpositive phasepositive phototaxispositive punishmentpositive reactionpositive recollectionpositive reference grouppositive regardpositive regencypositive reinforcementpositive reinforcerpositive reinforcing stimuluspositive rewardpositive sanctionpositive self feelingpositive skewnesspositive stimuluspositive symptompositive time errorpositive transferpositive transferencepositive valencepositivismpositivistic philosophypositivity biaspositron emission tomography posodynicspossessivenesspossibilitypossible errorpossible judgmentpossible outcomepost adaptationpost columnpost conventional level post enumeration survey post formation theorypost hoc fallacypost hoc testpost hornpost hypnotic amnesiapost hypnotic behaviorpost hypnotic suggestion post industrialized society post infections psychosis post partus bluespost surveypost term infantpost testpost traumatic amnesiapost traumatic delirium post traumatic dementia post voluntary attention postadolescence postadolescentpostage stamp experiment postcentral gyruspostconsummatory behavior postconventional level postconventional level of morality postconventional morality postcornupostcranialpostdecision dissonance postdormitumpostepilepticposteriorposterior association area posterior columnposterior commissureposterior comparisonsposterior hornposterior lobeposterior lobe hypophysisposterior lobe of the hypophysis posterior nuclear complexposterior parietal areaposterior pituitary glandposterior probabilityposterioritypostfebrile dementiapostfigurative culture postformation theory postganglionic fibreposthypnotic amnesiaposthypnotic effectsposthypnotic suggestion posthypophysispostinfectious depression postinfectious psychosis postjunctional potential postmaturepostmature infantspostmaturitypostmortem analysispostnatalpostnatal developmentpostnatal environment postpartum depression postpartum psychiatric reaction postpartum psychosis postpuberalpostpuberal phasepostpubertalpostpubertypostpubescencepostpubescentpostretinalpostretinal fiber postschizophrenic depression postsynapticpostsynaptic cellpostsynaptic inhibition postsynaptic membrane postsynaptic neuron postsynaptic potentialposttest designposttetanic facilitation posttetanic potentiationposttreatment follow up postulatepostulational method postural coordination postural reflex postural setpostural substrate postural swaypostureposture expression posture sense posturogaphy posturometer potamophobiapotencypotency dimension potentialpotential ability potential competition potential concept stage potential consumers potential criminal potential defect potential delinquent potential demand potential difference potential intellect potential learning potential market potential of action potential reasonpotential stimuluspotential unemploymentpotential utilitypotential variabilitypotential vocabularypotentialitypotentializationpotentiationpotentiometerpotentiometric methodpotentiometryPoter's generic competitive strategies potomaniapoundpourpouring in process in instruction poverty of movementpoverty of thoughtpowderpower coercive strategypower curvepower dependence theorypower distancepower driverpower efficiencypower factorpower functionpower function lawpower motivepower needpower of imagerypower of influencepower of intellectpower of soulpower of statistical test power of testpower relationpower spectrumpower structurepower strugglepower tacticspower testpowerlessnessPPSpractical activitypractical agopractical experiencepractical frameworkpractical intelligence practical knowledgepractical levelpractical philosophypractical problempractical psychologypractical purposepractical reasoningpractical situation practicalnesspractice curvepractice curve of action practice curve of performance practice effectpractice errorpractice limitpractice periodpractice supervisionpractice teachingpractice theorypractice theory of playpradictionpraecoxpraecox ejaculationpraecox feelingpragmatagnosiapragmatamnesiapragmatic value theorypragmatismpraiseprandial drinkingpraxeologypraxisPREpre adolescencepre after comparison methodpre competition emotional statepre competition mental preparation pre competition mental trainingpre competition psychological state pre competition statepre determinationpre drawing periodpre equatingpre established harmonypre feeding behaviorpre heatedpre inductionpre schematic stagepre school acepreadaptationpreadaptive mutationpreadaptive phasepreadolescencepreadultprearrival stagepreataxicpreattentive processprecariousprecausal thinkingprecausalityprecedenceprecedence effectprecedence methodprecentral gyrusprecisionprecision of samplingprecision of simple random sampling precociousprecocious childprecocious developmentprecocious pubertyprecocityprecodingprecognitionprecoidprecollege counselingprecollege guidanceprecompetition apathy state precompetition downcast symptom precompetition mental preparation precompetition overconfidence state precompetition overexciting state preconceptpreconceptionpreconceptual thoughtpreconditionpreconditioningpreconditioning adaptation preconsciouspreconscious process preconsciousnesspreconsummatory behavior preconventional level preconventional level of morality preconventional moralityprecoxprecursorprecursor of neocortexpredator modelpredatorypredatory behaviorpredecessorpredeterminationpredeterminepredetermined harmony predeterminismpredicate intersection model* predictabilitypredicted variablepredictionprediction of criminal mentality prediction of criminalityprediction of delinquencyprediction of early illegal behavior prediction of first offense prediction of recidivismprediction of second offense prediction to motor objectpredictivepredictive abilitypredictive attentionpredictive displaypredictive efficiencypredictive indexpredictive method of criminality predictive periodpredictive studypredictive validitypredictive valuepredictive variablepredictor variablepredilectionpredispositionpredominancepredominatepredormitiumpredreampreferencepreference methodpreference scalepreference testpreferential learning preferred colorpreferred orientation preferred orientation column preferred rewardprefoetal period preformationpreformation theory preformationismprefrontalprefrontal areaprefrontal cortexprefrontal leucotomy prefrontal lobeprefrontal lobotomy preganglionic fibre pregenital phasepregenital stage pregenitalitypregnancepregnancyprehensionprehension program prehension testpreinductionprejudgmentprejudicepreliminary analysispreliminary datapreliminary forecastingpreliminary investigation preliminary measurespreliminary mentorpreliminary observationPreliminary Scholastic Aptitude Test preliminary studypreliminary surveypreliminarytrialprelinguistic behaviorprelinguistic developmentprelogical thinking prelumirhodopisinPremack principlepremarital counselingprematurationprematurepremature childpremature ejaculationpremature infantpremature repeningprematuritypremeditated crimepremenstrual syndromepremenstrual tensionpremisepremiumpremorbidpremotor areaprenatalprenatal behaviorprenatal development prenatal development stage prenatal diagnosis prenatal environment prenatal influence prenatal periodprenatal training prenubilepreoccupationpreographpreogurative culture preoperation period preoperation thought preoperational stage preoptic areapreoptic regionpreorganic evolution preorganizerpreparationpreparation theory of play preparative period preparative stage preparatory interval preparatory measure preparatory response preparatory set preperception preponderance preponderantprepossessionprepotencyprepotentprepotent reflex prepotent response prepotent stimulus prepotential reflexes prepsychoticprepuberal stage prepuberty prepubescence prerecognition hypothesis prerecordprerelease prerepresentation prereproductive prerequisitepreretired education prerogativepresagepresbyacusispresbyatricspresbyopepresbyophrenia presbyopiaPresbyterian Presbyterianismpresbytia preschizophrenic preschoolpreschool child。
医学生理学英语单词
internal environment homeostasis negative feedback positive feedback 内环境稳态负反响正反响simple diffusionfacilitated diffusion via ion channel facilitated diffusion via carrier primary active transport secondary active transport exocytosisendocytosisresting potential hyperpolarizationpolarizationdepolarizationovershootrepolarizationspike potentialthresholdsalutatory conductionthreshold potentiallocal potentialspatial summationtemporal summationexcitationexcitabilityexcitation-contraction coupling absolute refractory period relative refractory period supranormal periodsubnormal periodend-plate potentialcalcium induced Ca release performance of contraction isometric contractionisotonic contractionpreloadinitial lengthoptimal initial lengthafterloadcontractilitytetanus 单纯扩散经通道易化扩散经载体易化扩散原发性主动转运继发性主动转运出胞入胞静息电位超极化极化去极化超射复极锋电位阈值跳跃式传导阈电位局部电位空间总和时间总和愉悦愉悦性愉悦缩短耦联绝对不应期相对不应期超常期低常期终板电位钙触发钙释放缩短效能等长缩短等张缩短前负荷初长度最适初长度后负荷肌肉缩短能力强直缩短cardiac cycleperiod of isovolumic contraction end-diastolic volumeejection fractioncardiac outputcardiac indexstroke workheterometric regulation ventricular compliance homometric regulationcardiac reserve autorhythmicityinward rectifier K+ channel transient outward current plateaudelayed rectifier K+ current myocardial contractility maximal repolarization potential pacemaker currentlatent pacemakerconductivitypreferential pathway atrioventricular delay electrocardiogrammean circulatory filling pressure peripheral resistancesystolic pressurediastolic pressurecentral venous pressure transmural pressure microcirculationeffective filtration pressure positive chronotropic action negative dromotropic action positive inotropic action cardiac vagal tone sympathetic vasoconstrictor tone cardiovascular center baroreceptor reflexbuffer nervechemoreceptorrenin-angiotensin system epinephrine,adrenaline interstitial fluid 心动周期等容缩短期舒张末期容积射血分数心输出量心指数每搏功异长调治心室适应性等长调治心力储备自动节律性内向整流钾通道一过性外向电流平台期延缓整流钾流心肌缩短能力最大复极电位起搏电流潜藏起搏点传导性优势传导通路房- 室延搁心电图循环系统平均充盈压外周阻力缩短压舒张压中心静脉压跨壁压微循环有效滤过压正性变时作用负性变传导作用正性变力作用心迷走紧张交感缩血管紧张心血管中枢压力感觉性反射缓冲神经化学感觉器肾素 - 血管紧张素系统肾上腺素组织液coronary circulation compensatory pause premature systole (extrasystole) arterial pulseoverdrive suppression hemodynamicsarteriovenous shunt bradykinin 冠脉循环代偿间歇期前缩短动脉脉搏超速驱动压迫血流动力学短路血管(动缓激肽- 静脉短路)respirationpulmonary ventilation inspirationexpirationeupneadyspneaabdominal breathing thoracic breathing pneumothoraxspecific compliance intrapleural pressure elastic resistance surfactantalveolar ventilation intrapulmonary pressure tidal volumevital capacityminute ventilation volume forced vital capacity physiological dead space ventilation/perfusion ratio oxygen capacityoxygen contentoxygen dissociation curve carbaminohemoglobin Bohr effectoxygen saturation carbonic anhydrase respiratory center pneumotaxic center pulmonary stretch reflex 呼吸肺通气吸气呼气宁静呼吸呼吸困难腹式呼吸胸式呼吸气胸比适应性胸膜腔内压弹性阻力表面活性物质肺泡通襟怀肺内压潮襟怀肺活量每分通襟怀用力肺活量生理无效腔通气 /血流比值氧容量氧含量氧离曲线氨基甲酸血红蛋白波尔效应氧饱和度碳酸酐酶呼吸中枢呼吸调整中枢肺牵张反射digestion mechanical digestion chemical digestion 消化机械性消化化学性消化absorptionslow wavebasic electrical rhythm, BERintrinsic nervous systemextrinsic nervous system gastrointestinal hormone(gut hormone)pepsinogengastric mucosal barrierintrinsic factorgastrinreceptive relaxationgastric emptyingmigrating motor complex, MMC segmental motilityenterogastric reflexperistalsistrophic action 吸取慢波基本电节律内在神经系统外来神经系统胃肠激素胃蛋白酶原胃黏膜屏障内因子胃泌素容受性舒张胃的排空移行性复合运动分节运动肠胃反射蠕动营养作用energy metabolismthermal equivalent of food thermal equivalent of oxygen respiratory quotient, RQnon-protein respiratory quotient,specific dynamic effectbasal metabolism rate, BMR body temperatureset point NPRQ能量代谢食品的热价食品的氧热价呼吸商非蛋白呼吸商特别动力效应基础代谢率体温调极点nephron juxtaglomerular apparatus macula densa tubuloglomerular feedback glomerulotubular balanceglomerular filtration rate ,filtration fraction , FF filtration equilibriumrenal threshold for glucose osmotic diuresiswater diuresisclearancereabsorptionrenal plasma flow,RPF vasa recta GFR肾单位球旁器致密斑管-球反响球-管平衡肾小球滤过率滤过分数滤过平衡肾糖阈浸透性利尿水利尿除去率重吸取肾血浆流量U 直小血管receptor感觉器adequate stimulus合适刺激receptor potencial感觉器电位reduced eye简化眼visual acuity视敏度near point of vision近点myopia近视hyperopia远视astigmatism散光rod cell视杆细胞cone cell视锥细胞dark adaptation暗适应light adaptation明适应visual field视野Cochlear micro-phonic potential耳蜗微音器电位trophic action神经的营养性作用functional action神经的功能性作用axoplasmic transport轴浆运输Postsynaptic potential突触后电位Excitatory postsynaptic potential愉悦性突触后电位Inhibitory postsynaptic potential控制性突触后电位postsynaptic inhibition突触后控制presynaptic inhibition突触前控制Afferent collateral inhibition传入侧支性控制Recurrent inhibition回返性控制varicosity)曲张体neurotransmitter神经递质neuromodulator神经调质receptor受体one way conduction单向流传central delay中枢延搁Sensory Projection System感觉投射系统Specific Projection System特异性投射系统Non-specific Projection System非特异性投射系统Ascending reticular activating system 脑干网状结构上行激动系统sensory column感觉柱referred pain波及痛cortical evoked potential皮层引起电位Electroencephalogram脑电图electrocorticogram皮层电图slow wave sleep慢波睡眠fast wave sleep快波睡眠motor unitstretch reflex muscle tonus tendon reflex muscle spindle tendon organ moter column spinal shock spinal animal decerebrate animal decerebrate rigidity vestibulocerebellum spinocerebellum cerebrocerebellum intention tremor static tremor biorhythm defense reaction loss of mrmory feeding center satiety center 运动单位牵张反射肌紧张腱反射肌梭腱器官运动柱脊休克脊动物去大脑动物去大脑僵直前庭小脑脊髓小脑皮层小脑意向性震颤静止性震颤生物节律防守反响忘掉摄食中枢饱中枢endocrinepermissiveness action hypothalamic regulatory peptides human growth hormonethyroid hormonesparathyroid hormone calcitonininsulinglucocorticoidscortisolstresssomatomedinprolactinoxytocininsulin-like growth factor 内分泌赞同作用下丘脑调治肽生长激素甲状腺激素甲状旁腺激素降钙素胰岛素糖皮质激素皮质醇应激生长素介质催乳素缩宫素胰岛素样生长因子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 Performance metric for vision based robotlocalizationEmanuele Frontoni,Andrea Ascani,Adriano Mancini,and Primo ZingarettiAbstract—This paper aims to propose a roadmap for bench-marking vision based robot localization approaches.We discuss the need for a new series of benchmarks in the robot visionfield to provide a direct quantitative measure of progress understandable to sponsors and evaluators of research as well as a guide to practitioners in thefield.Afirst set of benchmarks in two categories is proposed:vision based topological and metric localization.In particular we present a novel way to measure performances with respect to the particular data ser used and we show the application of this method on2big dataset of omnidirectional indoor and outdoor images.We also present the web site where all data are collected and where every research group can announce their result using the proposed performance evaluator.Index Terms—Localization,Vision,Feature Extraction,Group Matching.I.I NTRODUCTIONV ISION based localization is one of the fundamental problems of mobile robots and until today,while tens of papers proposed different approaches to this problem,there are not real benchmarks in thisfield able to compare and evaluate advances in vision based robotics.This paper discusses the strategy for devising and using a new series of benchmarks in the robot visionfield and in particular in thefield of vision based robot localization.We discuss the need for a new series of benchmarks in the robot visionfield to provide a direct quantitative measure of progress as well as a guide to researchers in thefield.In particular a first set of benchmarks in two categories is proposed:vision based topological and metric localization.The knowledge about its position allows a mobile robot to efficiently fulfill different useful tasks like,for example, office delivery.In the past,a variety of approaches for mobile robot localization has been developed.They mainly differ in the techniques used to represent the belief of the robot about its current position and according to the type of sensor information that is used for localization.In this paper we consider the problem of vision-based mobile robot topological and metric pared to proximity sensors,which are used by a variety of successful robot systems,cameras have several desirable properties.They are low-cost sensors that provide a huge amount of information and they are passive so that vision-based navigation systems do not suffer from the interferences often observed when using active sound-or Authors are with the Department of Ingegneria Infromatica,Gestionale e dell’Automazione(DIIGA),Universit Politecnica delle Marche,Ancona, ITALY.Contact author:frontoni@diiga.univpm.it.Authors thank Giorgio Ascani for his valuable support to this research.light-based proximity sensors(i.e.soft surfaces or glasses). Moreover,if robots are deployed in populated environments, it makes sense to base the perceptional skills used for local-ization on vision like humans do.Over the past years,several vision-based localization systems have been developed.They mainly differ in the features they use to match images or for the appearance based matching(i.e.color histograms,Fourier signatures,etc.)in opposition to metric based approaches(i.e. binocular vision,calibrated omnidirectional vision,etc.).Local feature matching has become a commonly used method to compare images.For mobile robots,a reliable method for com-paring images can constitute a key component for localization and loop closing tasks.Our data sets,each consisting of a large number of omnidirectional images,have been acquired over different day time both in indoor and outdoor.Two different types of image feature algorithms,SIFT and the more recent SURF,have been used to compare the images,together with a variants of SURF,called U-SURF and a variant of SIFT called Adaptive SIFT2.The paper is organized as follow.After discussing issues and methodologies in creating vision benchmark problems, this paper presents an evaluation criteria in thefield of robot localization and a few example problems in the domain of vision based robot localization using omnidirectional vision.II.C HALLENGES IN BENCHMARKING ROBOT VISIONAPPROACHA pertinent benchmark approach is thefield of robotics is a set of evaluations for all subsystems,including stereo vision, road-following,path planning,SLAM,grasping,etc.All this kind of test and modules are necessary to evaluate and compare the behavior of a robot system in different environments and different contours conditions.The principal goals of the proposed vision benchmarks are to evaluate scientific progress in the specific mentioned problem area and to make the extent of such progress apparent to the evaluators of the research as well as to the scientists working in thisfield.Evaluation of a set of alternative solutions to a problem naturally involves comparing the resultant scores and to thus rank the techniques.We can’t avoid competition. Nonetheless,it is very important to make sure that we are competing on the right problems,that the competition is fair, and that we don’t poison the currently excellent cooperative atmosphere that exists in the robot vision research commu-nity.Among its positive benefits,benchmarking will promote collaboration.Many researchers will not be able to afford to develop all the system components themselves in order2 to enter the evaluation.A module or component that hasbeen proven to have high performance will be transferredfrom the hands of the developer to other sites whose mainresearch focus is not the module,but rather access to itsfunctionality.An example should be the probabilistic moduleson the localization or SLAM problems in comparison with thespecific vision problem.Further,the problem of automaticallyfinding settings for adjustable parameters(present in almostevery vision algorithm)is a key vision problem in whichprogress should be encouraged and the benchmark could be apositive influence in this regard.Other positive effects of benchmark are:the promotion ofresearch because there exists accepted criteria of progress;theestablishment of some priorities on problems to be solved;andan increased awareness of the availability and usefulness of abroader range of techniques for performance improvement.III.P ERFORMANCE EVALUATOR AND BENCHMARKINGPROCEDUREAll the experiments should be performed in differentdatasets provided that they are collected using the followingcriteria and published on line to permit comparison.Everydataset must provide a reference image database collected indifferent environment conditions(in particular light or weatherconditions for indoor or outdoor images).Every dataset mustprovide at leastfive different test sets collected in the sameenvironment,but in different positions with respect to the dataset of reference images.If possible,test sets should be dynamicand cover the case of presence of occlusion.The performance evaluator takes into account differentaspects of the vision based localization problem:•the size of the dataset S(considering both the extensionof the area covered by the robot S1and the number ofimages collected in the reference image database NS);•the aliasing of the dataset A(a detailed explication of thealiasing measure will be given in next session);•the percentage of correct localization,in the case oftopological localization,or the average localization error,both represented by L,in the case of metric localization(average of at least ten trials,measured in percentage ormillimetres respectively);•the resolution R used in the image processing module,measured using the total number of pixels of the image(lowest resolutions are considered better in robotics dueto the purpose of needing low cost commercial roboticssystems);The evaluator E results in the formula:E=A·L S·RWhere S=S1/NS represents the fact that good results on a big area covered by a few images represent a better performance than the result obtained on a same area covered by a huge number of reference images.The aliasing of a dataset is a very important parameter when we want to compare results among different approaches using also different data.A place in the environment can be defined aliased when there are other places the look like it. The aliasing should be a measure of the self-similarity of the environment and of the refence dataset(in the case of visual robot navigation).To deal with this problem we define aliasing of a dataset the medium value of the matrix representing the similarity,evaluated with one of the used approach,between all reference images.The highest is the aliasing,the hardest is the localization using those set of reference images.The web site vrai.diiga.univpm.it contains all datasets used in this paper and a couple of forms to collect other datasets and to collect results obtained by different researchers using different approaches to solve the problem of robot localization.IV.E XPERIMENTS AND RESULTS10 mIDD1, IED1×IDR1, IER1, IDR1o×IDR2, IER2, IDR2o×IDR3Figure1:Details about Indoor datasets and routesFigure2:Details about Outdoor datasetsHere we present a comparison,using the proposed eval-uation method,among different feature based localization3methods,using two different methods to derive localization from image similarity.Localization performances are evaluated using two different approaches.•Winner-Takes-All Localization (WTA):the estimated robot position is the position of the most similar image in the dataset with respect to the actual robot view.This position is compared with the ground truth verified during the test route.If the label is the same the robot is considered correctly localized.•Monte Carlo Localization (MCL):the estimated robot pose is the result of the probabilistic particle filter applied using a vision similarity based sensor model and a classic motionmodel.Figure 3:ActivMedia P3-AT Robot,equipped with omnidirec-tionalcameraFigure 4:Kraun webcam (1280x1024pixels)and omnidirec-tional mirror used to collect images We are interested in an appearance-based place recognition system for topological localization.Topological localization algorithms are based on adjacency maps.Nodes represent locations,while arcs represent the adjacency relationships between locations.In our case we rely only on place labels of every reference image:if the label of the estimated (both with WTA and MCL)robot position is the same of the real robot one we consider the topological localization successful.On another side we can consider a metric localization during which we are interested on a minimization of the localization error between the estimated (using MCL)position of the robot and the real robot pose.In this case the robot position is estimated using the error between the highest weighted particle and the real robot position or between the weighted mean particle position and the real robot pose.A Monte Carlo particle filter could also be used to com-pare localization performances with classical localization ap-proaches used in literature and to deal better with perceptual aliasing.Local feature matching has become an increasingly used method for comparing images.Various methods have been proposed.The Scale-Invariant Feature Transform (SIFT)by Lowe [1]has become,with its high accuracy and relatively low computation time,the de facto standard.Some attempts of further improvements to the algorithm have been made (for example PCA-SIFT by Ke and Sukthankar [2]).Perhaps the most recent,promising approach is the Speeded Up Robust Features (SURF)by Bay et al.[3],which has been shown to yield comparable or better results to SIFT while having a fraction of the computational cost [3],[4].For mobile robots,reliable image matching can form the basis for localization and loop closing detection.Local feature algorithms have been shown to be a good choice for image matching tasks on a mobile platform,as occlusions and missing objects can be handled.In particular,SIFT applied to panoramic images has been shown to give good results in indoor environments [5],[6]and also to some extent in outdoor environments [7].However,outdoor environments are very different from indoor environments.Both SIFT and SURF contain detectors that find interest points in an image.The interest point detectors for SIFT and SURF work differently.However,the output is in both cases a representation of the neighborhood around an interest point as a descriptor vector.The descriptors can then be compared,or matched,to descriptors extracted from other images.SIFT uses a descriptor of length 128.Depending on the application,there are different matching strategies.SURF has several descriptor types of varying length.A variant to SIFT was proposed by Frontoni [8].This approach is based on SIFT extractor and in particular it proposes an improvement of this feature extraction method to deal with changes in lighting conditions.This kind of adaptive vision is necessary in various application fields of vision feature based techniques,e.g.outdoor robotics,surveil-lance,object recognition,etc.In general,the improvement is particular useful whenever the system needs to work in presence of strong lightness variations.Also,while invariant to scale and rotation and robust to other image transforms,the SIFT feature description of an image is typically large and slow to compute.To solve this matter an approach to reduce the SIFT computational time is also presented.In this paper,we also use regular SURF (descriptor length 64),SURF-128(where the descriptor length has been dou-bled),and U-SURF (where the rotation invariance of the interest points have been left out,descriptor length is 64).U-SURF is useful for matching images where the viewpoints are different from one another in a translation and/or a rotation4in the plane (i.e.planar motion).It should be noted that U-SURF is more sensitive to image acquisition issues,such as the omnidirectional camera axis not being perpendicular to the ground plane.An extensive test and comparison among the mentioned approaches was conducted by Valgren [9]comparing different image datasets taken in different seasons [1],[10].A curved mirror (Figure 4)is located over the camera to grab omnidirectionalimages.Figure 5:Example of omnidirectional images:(a),(b),(c)are from IDR1,IER1and IDR1o,representing the same scena indifferent conditions;(d),(e),(f)are from ODD1In order to use an image database for mobile robot local-ization,it should be considered that the probability that the position of the robot at a certain moment exactly matches the position of an image in the database is virtually zero.Accordingly,one cannot expect to find an image that exactly matches the search pattern.In our case,we therefore are interested in obtaining similar images together with a measure of similarity between retrieved images and the search pattern.So we have to calculate,using features extraction and matching,a parameter to compute how much two different images can be considered similar.In our case,as a simply measure of similarity,we chose the ratio between the number of features matched and the maximum number of features extracted in either image .In this way two different images having a high percentage of similar features could be con-sidered quite similar.In this way is possible to estimate how much the positions of the robot looks like one of the reference pictures.A.Data SetsTen datasets were acquired in several lighting conditions and in dynamic conditions (occlusions,different car parked around,people moving,etc.),both indoor and outdoor.The indoor datasets cover a large part of DIIGA (Dipartimento di Ingegneria Informatica Gestionale e dell’Automazione ),and outdoor datasets span a part of the area in front of Engineering Faculty.B.Details about the Data Sets•IDD1consists of 218omnidirectional images describing the two floors of DIIGA,with day-time luminosity con-ditions.•IED1consists of the same number of images than previ-ous,but acquired with evening luminosity conditions.•IDR1and IDR2consists of two routes,with 24and 15images respectively,acquired at daily-time at DIIGA’s 170floor.•IER1and IER2are analogous to previous two,but in evening luminosity.•IDR1o and IDR2o are analogous to IDR1and IDR2,but images were forcedly occluded so that a part of environment is not visible.•IDR33consists of a route of 11images,acquired at daily-time at DIIGA’s 165floor.•ODD1and ODR1consists of 52and 12images acquired outdoor,in front of Engineering Faculty with full day-time luminosity:the sunlight in some cases occludes part of the image.A ”dataset”is the reference image database used as the a priori knowledge of the environment (we do not need a metric map in such an approach).Usually datasets are very large and cover,though not completely,the test area.We acquired images every few meters,even if the distance between images varies between datasets.With ”route”we refer to a series of routes followed by the robot while performing a localization ually this route is relatively short and dynamic conditions around the robot are allowed.Different routes allow us to perform several localization tests without using a subset of the reference image database.C.Data AcquisitionThe datasets were acquired by an ActivMedia P3-AT robot equipped with a webcam (1280×1024pixels).Over the camera is located a curved mirror to grab omnidirectional images,which were stored in .pgm format and resized to 640×480pixels to reduce the number of detected features.To produce a general dataset for future tests we stored both color and gray levels images.All used datasets are available on request to authors for benchmark purposes.D.ExperimentsTwo experiments were designed to prove the reliability of the proposed approaches with particular attention to image similarity rather than to probabilistic localization algorithms.•In the first experiment all seven route datasets were com-pared with the two indoor datasets (daily and evening).For each image of each dataset features were extracted according to several algorithms mentioned before;then the number of feature matches between the images re-spect to the maximum number of extracted features is taken as measure of similarity.The image with the highest similarity was considered to be the winner.If the label of each pair of correspondent5images identifies the same environment,the topological localization is correct.•The second experiment is similar to thefirst one,but using the outdoor data sets.Figure6:Topological Winner-Takes-All Localization,using IDD1and nofilter,with a threshold of0.8Figure7:Topological Winner-Takes-All Localization,using IED1and nofilter,with a threshold of0.8E.Indoor ResultsFirst charts show the obtained results in indoor environ-ments with nofilter applied and using the WTA approach: SIFT and SURF outperform other algorithms,reaching respectively65.24%and46.94%.Using daily data set the results are better(+31%).However,using routes with low luminosity and those with obstacles similarity is rather small(26.67%),also using adap-tative SIFT.Also using the evening dataset the worst results are obtained with routes acquired in different luminosity(13.54%). Adaptative SIFT and U-SURF are on the average very lower than others(respectively36.19%and35.96%).Using Monte Carlo Particle Filtering increases localization’s percentage for12%on the average;SIFT and SURF confirm to be the best(respectively72,51%e56,43%).However using occluded datasets the improvement is lower than in other cases.It is important to say that using Monte Carlo,localization is valuated only after5steps of thealgorithm.Figure8:Topological Monte Carlo Localization,using IDD1 and nofilter,with a threshold of0.8Figure9:Topological Monte Carlo Localization,using IED1 and nofilter,with a threshold of0.8Infigure Figure11we report the metric localization error during the experiments;the graph shows an example of correct localization and tracking over the whole route of the robot. The minimum error is of about20cm.This shows that the proposed similarity metric and feature matching approach can be successfully used also in metric localization.F.Outdoor ResultsUsing only one outdoor dataset and route it is not possible have an accurate analysis as in the indoor situation.However it is possible to analyze and compare algorithms in a dynamic and variable environment between buildings,cars and vegeta-bles.Considering WTA Localization,although all algorithms give good topological localization percentages,U-SURF outper-forms others,reaching100%versus80.56%reached with SIFT.Monte Carlo localization also in this case increases percent-ages for8.73%on the average.G.Result comparison and performance evaluationThe main objective of this paper remains the possibility to evaluate a benchmark quality value for each of the proposed approach.Table1summarizes the performances about some of the above described experiments according to the proposed evaluator.6Figure10:Topological Localization,Outdoor Environment, grouped by Feature Extractor AlgorithmsTable I:Performance EvaluatorExperiment Parameters(A L S R)EIndoor WTA0.25780,2307,20,254Indoor MCL0,25930,2307,20,308Outdoor WTA0,11630,07307,20,206Outdoor MCL0,11930,07307,20,303This table brings to the conclusion that is possible to compare different approaches over different dataset having a good performance evaluator.In this particular case the quality of the performance parameter is remarked by the observation that the same approach over different datasets brings to similar results.Also the proposed approach is easily applicable to metric and topological localization.V.C ONCLUSIONWe have taken the initial steps in developing a new set of machine vision benchmarks in the areas of robot localiza-tion.The next steps involve more careful delineation of theronment during a successful test;error between the highest weighted particle and the real robot position(1)and between the weighted mean particles position(2)and the real robot pose during global localization and traking.Mean error is espressed in number of grid cells where each one is of20cm.experimental protocol,selection of the specific problems,and the gathering of imagery and other test data.We welcome comments on this new benchmarking effort.In this paper,we also addressed the issues of appearance-based topological and metric localization for a mobile robot over different lighting conditions using omnidirectional vision.Our datasets,each consisting of a large number of omnidirectional images,have been acquired over different day times both in indoor and outdoor environments.Two different types of image feature extractor algorithms,SIFT and the more recent SURF,have been used to compare the images,together with a variant of SURF,called U-SURF and a variant of SIFT called Adaptive SIFT.R EFERENCES[1] D.Lowe,“Distinctive image features from scale-invariant keypoints,”International Journal of Computer Vision,vol.60,no.2,pp.91–110, 2004.[2]Y.Ke and R.Sukthankar,“Pca-sift:A more distinctive representation forlocal image descriptors,”IEEE Conf.on Computer Vision and Pattern Recognition(CVPR),vol.2,pp.506–513,2004.[3]H.Bay,T.Tuytelaars,and L.V.Gool,“Surf:Speeded up robustfeatures,”in Ninth European Conference on Computer Vision,2006. [4]H.Bay,B.Fasel,and L.V.Gool,“Interactive museum guide:Fast androbust recognition of museum objects,”in Proc.Int.Workshop on Mobile Vision,2006.[5]H.Andreasson and T.Duckett,“Topological localization for mobilerobots using omni-directional vision and local features,”in5th IFAC Symposium on Intelligent Autonomous Vehicles(IAV),Lisbon,2004. [6] B.Krose,O.Booij,and Z.Zivkovic,“A geometrically constrained imagesimilarity measure for visual mapping,localization and navigation,”in Proc.of3rd European Conference on Mobile Robots,Freiburg, Germany,2007.[7] C.Valgren,T.Duckett,and A.Lilienthal,“Incremental spectral cluster-ing and its application to topological mapping,”in Proc.IEEE Int.Conf.on Robotics and Automation,2007,p.42834288.[8] E.Frontoni,A.Mancini,and P.Zingaretti,“Vision based approachfor active selection of robots localization action,”in Proc.of the15th Mediterranean Conference on Control&Automation,Athens,Greece, 2007.[9] C.Valgren and A.Lilienthal,“Sift,surf and seasons:Long-term outdoorlocalization using local features,”in Proc.of3rd European Conference on Mobile Robots,Freiburg,Germany,2007.[10]S.Se,D.Lowe,and J.Little,“Vision-based mobile robot localizationand mapping using scale-invariant features,”in Proceedings of the IEEE International Conference on Robotics and Automation(ICRA)2001, Seoul,Korea,May2001,pp.2051–2058.。