基于CORBA的工业机器人软件框架的研究和应用_宋洪军
一个基于CORBA技术的软件集成框架的设计与实现
一个基于CORBA技术的软件集成框架的设计与实现马成斌;常军【期刊名称】《计算机工程》【年(卷),期】2001(027)001【摘要】CORBA technology is becoming the most important software developing and software integration technology. A BBWM software integration framework based on CORBA is introduced in this paper, DOS, MS-Windows or Unix application can be migrated to CORBA/Web environment smoothly by using the framework without knowing the internal details of them and their source codes.%CORBA技术已经成为最重要的软件开发和集成技术.介绍了一个基于CORBA的黑盒包装方法软件集成框架,该框架可以将原来基于DOS、Windows.Unix平台下的应用程序平滑地移植到CORBA/Web环境中,而且不必知道被集成系统的内部细节和源代码.【总页数】3页(P182-184)【作者】马成斌;常军【作者单位】武汉水利电力大学计算机系,中国农业银行湖北省分行科技中心,;武汉水利电力大学计算机系,【正文语种】中文【中图分类】TP311.52【相关文献】1.基于CORBA的坐标测量软件的设计与实现 [J], 叶东;王传新;车仁生2.基于CORBA技术的PDM集成框架的研究与实现 [J], 雷军环;费洪晓;阙建荣3.一个基于JIDM规范的CORBA/SNMP网关设计与实现 [J], 仲兆祥;范戈4.基于CORBA的服务器端应用软件集成框架技术 [J], 周健;周明辉;吴泉源5.一个基于CORBA和移动智能体的分布式网管集成框架 [J], 吴刚;王怀民;吴泉源因版权原因,仅展示原文概要,查看原文内容请购买。
CORBA技术剖析及其应用

CORBA技术剖析及其应用梁剑,李晓,胡彬华(中国科学院新疆物理研究所,新疆乌鲁木齐830011)摘要:为了满足复杂的、大型的分布式应用开发的需求,作为基于组件对象模型的分布式技术规范,CORBA 和COM/DCOM技术被广泛采用。
主要分析CORBA技术的标准、结构、特点及其作用,并提出了CORBA对象的具体实现方法;同时也给出了CORBA技术和COM/DCOM技术相应的对比。
关键词:分布式应用;CORBA;COM/DCOM中图法分类号:TP311.5文献标识码:A文章编号:1001-3695(2002)08-0091-03The Anatomy and Application of CORBA TechnologyLIANG Jian,LI Xiao,HU Bin-hua(The Xinjiang Institute of Physics,the Chinese Academy of Sciences,Wulumugi Xinjiang830011,China)Abstract:In order to meet that need of the large-scale and complicated development of distributed application,as the distributed technology standard of component model,CORBA and COM/DCOM technologies are used widely.In this paper,we analyze the criterion,structure,char-acteristic and function of CORBA technology,and give an achieving method.In addition,we have given the comparison between CORBA and COM/DCOM technologies.Key words:Distributed Application;CORBA(Common Object Reguest Broker Architecture);COM/DCOM1引言目前,开发分布式多层应用系统似乎是所有开发工具、数据库厂商、Internet/Intranet、工具,以及操作系统厂商都积极提倡的应用系统结构。
基于corba软件体系结构

摘要随着软件开发的愈来愈复杂,构件化开发是提高软件复用的重要的技术。
软件体系结构提供了种自顶向下实现基于构件的软件复用的途径。
它的ADL描述提供了一种描述整个系统构造的能力。
而当前的UML只安为其提供一些扩展也能够描述软件体系结构。
构件化的开发目前已经有很多成熟的技术,而CORBA规范充分利用了现今软件技术发展的最新成果,在基于网络的分布式应用环境下实现应用软件的集成,使得面向对象的软件在分布、异构环境F实现可重用、可移植和互操作。
我们提出~种基于CORBA的袍灶珏菇摸式,这是~种三层结构的开发模式,先粟用UML描述整个系统的体系结构,建模出该系统的基本信息。
然后采用CORBA的二层结构开发模式实现它。
这种方J℃可以把大系统划分为很多独立的构件.可以更改某些构件而不会对系统的其他部分造成影响。
从而能够极大的提高软件的开发效率和复用。
关键字:软件体系结掬ADLUML构件技术CORBAVv∥。
√ABSTRACTWiththecomplexityofSoftwaredevelopment,Component—BasedSoftwareDevelopmentisanimportangtechniqueofSoftwareReuseSoftwarearchitectureafrortsawaytorealizeaup-to—downsoftwareresuebasedoncomponents.it’SADLdiscriptionaffortsacompetence/abilitytodescribetheconstructionofthewholesystem,thecurrentUMLneedonlytobeaffordedsomcextendtodescribesoftwarearchitecture.Component—BasedSoftwareDevelopmenthaspossessedmanymaturationaltechnologies,butCORBAavailsofthelatestproduceofcurrentsoftwaretechnologydevelopment,Realizesintegrationofapplicationsoftwareinthenet—distributed—usebasedcircumstance,makestheSoftwarerealizereuse,transplant,andinteractivemanipulation.WeadvanceacomponentdevelopmentmodelbasedonCORBA.it'sadevelopmentmodelincludingtllleestratificationstructures.firstlyituseUMLtodescribethewholesystem’Sarchitecture.modelthebasicinformationofthesystem.thenitrealizesthesystembythecorbatllreesatratificationslructuresdecelopmentmodelthesystembythecorbathreesatratificationstructuresdecelopmentmodel.ThiskindofmodeCallde_idethebigsystemintomanyindependentcomponents,Canmodifysomecomponentswithoutanyaffectiontootherpansofthesystem.SOitcanextremelyimprovethedevelopinge币ciencyandreuseofthesoftware.Keyword:SoftwareArchitecture,CORBA,Compdent,ADL,UMLIll基1:CORBA的软件体系结构引言近儿年来,面对日益复杂的软件系统,人们开始认识到,要真LE实现软件的T业化生产力式,达到软件产业发展所需要的软件生产率和质量,软件复用是一条现实可行的途径。
基于CORBA的目录服务在基于Web的网络信息管理中的应用
基于CORBA的目录服务在基于Web的网络信息管理中的应用1李晓东 阎保平(中国科学院计算机网络信息中心 100080)摘要:本文分析了基于Web的网络信息管理的定义以及网络信息管理中的关键技术,针对网络信息管理中的数据存储和信息服务的特点,提出了基于CORBA和LDAP技术的目录服务解决方案,并论述了它在网络信息管理系统中的作用和重要性。
最后,在信息管理研究的基础上,给出了目录服务在当前网络发展尤其是电子商务中的应用前景。
关键词:信息管理、目录服务、软件总线现代网络管理分为网络运行管理和网络信息管理,也就是通常所讲的NOC和NIC的功能。
网络运行的管理,主要是针对FCAPS五个功能领域(故障Fault,配置Configuration,记帐Account,性能Performance,安全 Security)的管理,重点在于保证网络在物理上的畅通。
一般意义上的网络信息管理局限于对基础运行信息的管理(域名和IP地址的分配和管理)。
但是,随着网络技术的发展,Internet/Intranet逐步超越了单纯的网络模型的范畴,而成为一种新的规范的基础应用环境。
由于用户数量以及信息发布量的不断增加,以及存在的信息安全和用户权限的问题,使得网络信息管理关系到整个网络资源的有效利用,方便使用,安全可靠和有序运行。
网络信息管理的目标就是以信息资源组织、信息平台协调、用户及其权限管理、安全防范策略等方面为出发点,建立的一个集成化的综合网络信息服务管理平台,统一管理入口,对用户透明,并使信息服务管理由人工向智能化方向转化,减少人为的失误,从而保障网络服务的正常运行。
1网络信息资源的分类网络信息管理系统的核心就在于对网络信息的管理,我们将要管理的网络信息资源根据它的作用做了如下的划分,这种划分的原则和结果是系统设计实现的基础。
为了有效的管理这些信息,我们引入了目录服务,利用目录服务的技术特点,将目录服务构建于软件总线之上,作为网络信息管理中的数据核心,并提供目录服务。
基于CORBA技术的异构机器人互操作系统的研究
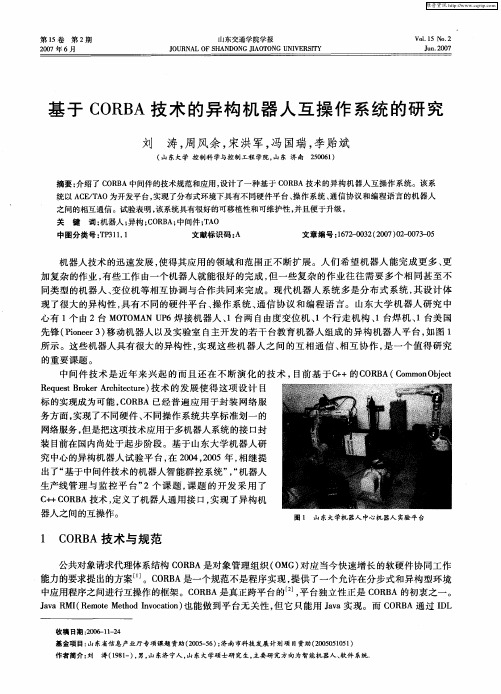
图 1 山 东大学机器人 中心机 器人 实验平台
1 C R A 技 术 与 规 范 O B
公共对象请求代理体系结构 C R A是对象管理组织 ( M 对应 当今快速增长 的软硬件协 同工作 OB O G)
能力的要求提出的方案 。C R A是一个规范不是程序实现 , 了一个允许在分步式和异构型环境 OB 提供 中应用程序之间进行互操作 的框架。C R A是真正跨平台的 , 台独立性正 是 C R A的初衷之一 。 OB 平 OB
维普资讯
! 兰 查 堂 奎 兰堕 塑 竺! 笙 堂 星 ( tf e en i a gae 的接 口定义语 言 , I ea f io Lnug ) n r c D i tn ]能做到与语言无关 , 任何语 言都能实现 C R A组件 , OB
关 键 词 :L e 器人 ; 异构 ;O B 中间件 ;A C R A; TO 文献标识码 : A 文章编号 :62 0 3 (0 7 0- 0 3 0 17- 0 2 20 )2 07 - 5 中图分类号 :P 1 . T 311
机器人技术 的迅速发展 , 使得其应用的领域 和范 围正不断扩展 。人们希望 机器人 能完成更多 、 更
CORBA构件模型在指控系统中的应用

d e v e l o p e d a n d d e s i g n e d wi t h r e u s a b l e c o mp o n e n t t e c h n o l o y, g w h i c h c o u l d d e v e l o p t h e s y s t e m’ S
C O R B A构件模型在指控系统中的应用
齐文 华
( 江苏自 动化研究所, 江苏 连云港 2 2 2 0 0 6 )
摘 要: 针对现有指控系统由于功能模块化设计导致模块间耦合性强 、 复用性差 , 系统开发效率低 以及升级 困难
等问题 , 分析了应用 C O R B A构件模型( C C M) 开发指控 系统软件的可行性 , 建立 了 C C M构件与分布式中间件集成模
板框 架 , 并以 Wo r k B e n c ห้องสมุดไป่ตู้开发环境为例, 给出了应用 C C M进行 指控 系统构件开发 、 打包 、 部署等具体实现过程 。 实际
应用 表明 : C C M在指控系统的有效应用 , 能够实现系统基于可重用构件设计 的开发 , 不仅提高了系统灵活性 、 重用性
和可配置性 , 而且 简化 了系统开发流程 , 缩短 了开发周期 , 降低 了开发成本 。 关键词 : C C M, 指控系统 , 构件 中图分类号 : T K 2 2 3 . 1 文献标识码 : A
t e c h n o l o g y i n CC M i s p r o v i d e d, a n d t h e p r o c e d u r e o f d e v e l o p i n g, a s s e mb l i n g , a n d c o n i f g u in r g c o mma n d
基于CORBA技术的机群智能化工程机械监控系统模型
一江南计算技术研 究所 刘学 勇 / LU Xu y n l e o g
总装工程兵 军代局 杨承先 /Y G Ch n xa AN e g in 解放军理工大学工程兵工程学院 李焕 良/ L H a l n 张琦 /Z A I u ni g a H NG Q
和存取数据库中数Βιβλιοθήκη ,使得非 法入侵数据库困难。此外 ,
( 3)语言映射 :负责将 I L定义的接 口翻译成相应 还 应 考 虑 系 统 的 可 扩展 性 、维 护 性 、经 济 性 和 可 靠 性等 。 D 的 程 序 语 言 , 由于 具 有 语 言 独 立 机 制 ,开 发 人 员 可 根据 需 要 选 用 编 程 语 言 , 目前 I 支 持 的 映 射 语 言 有 C 、 L D
机群 智能 化工 程机 械 是指 为完 成某 一具 体 工程 施 工项 目,实现最优 资源配置 最优工作效 率 ,最佳工作
1 COR BA 技 术 的 特 点
COR A。 B [ 是指公共对象请求代理结构( o C mmo - n Ob
质量而实行的 同步施工智能化工程机械的组合… ,如装 jc R q e t rkr rhe tr) et e us Bo e c icu , A t e 它是由 O ( b c M n MG O j t a - e 载 机 .挖 掘机 、推土机 、拌和站 、 自卸车 .摊铺机 等 。 a e n u ) g me tGr p 组织制定 的,定义在不同语言,不同平 o
随 着 中 国加 入 w ,基 础 设 施 建 设 规 模 的不 断 扩 台上 实现 对象并 支持分布式异构环境 下对象问相互操作 TO
CORBA技术的若干探讨

CORBA技术的若干探讨一、前言作为实际应用效果良好的技术方法之一,CORBA技术在实践中扮演着不可替代的角色,该项课题的研究,将会更好地提升CORBA技术的实践水平,从而有效优化轧钢厂电气设备检测的最终整体效果。
二、CORBA技术概述分布式设备在线状态监测系统可以较好地解决大型成套设备状态监测与故障诊断的问题,因而设备故障诊断工作者为此作了很多研究。
20世纪90年代以来,国外一些著名的公司已相继推出了成套的分布式设备在线监测系统,国内也有许多单位正在从事这方面的研制开发工作,并已经有较为商品化的系统问世。
目前分布式系统的实现技术有多种,其中采用CORBA,公共对象请求代理体系结构)技术构架分布式系统是比较成熟的实施方案之一。
在企业内建立和调配软件系统是一项复杂的任务。
CORBA为完成这一任务提供了功能强大的框架。
CORBA可以集各种操作系统平台和各种开发语言的优点于一身,具有良好的实时性、可靠性及跨平台性。
利用CORBA,可以更容易地开发异构分布式系统。
CORBA非常适合创建企业级或者多企业级的大型远程在线监测系统。
系统通过Intemet或Intranet将分布在不同地域的诊断对象的状态信息进行集成,利用CORBA技术构成具有多服务器互连,多层次信息交互,资源共建共享等特点的设备远程监测与故障诊断系统。
三、利用CORBA技术构架在线监测系统整个系统的构架分为三层:数据采集站、服务器和客户端。
数据采集站上安装有数据采集卡,负责采集数据,并对数据做初步处理后通过通讯线程传送到服务器,并可以根据不同的情况设置不同的采集参数。
服务器是系统的核心,是处理数据的关键部分。
服务器通过若干个双缓冲队列将所有数据暂时保存。
对于电流和功率,如果有跳闸信号,服务器将跳闸信号前5分钟的数据存人数据库;对于温度和湿度,服务器通过存储线程将所有特征值存人数据库。
同时,服务器通过监听线程池随时响应远程客户端的请求,包括实时数据的显示,历史数据的回放,以及温度和湿度信号的趋势分析等。
基于CORBA技术异构机器人监控系统平台的研究

是在 异构 机器 人之 上构 建集 成 中 间件 以 克服 异 构 型并
屏蔽 底层 复 杂性 。同 时 , 也 使 在 异 域 异 构 环 境 下 实 这 现 远程协 同监 控成 为 可能 。 中间件 ( d l r) 位 于操 作 系统 和应 用 程序 Mide e 是 Wa 之间 的通用 服务 , 些 服务 具 有 标 准 的 程序 接 口和协 这
议 。针 对不 同 的操 作 系统 和硬 件 平 台 , 符合 接 口和 有
业生 产 的各种机 器 人 的需 求 也 随之 提 高 。对一 条 复 杂 的 自动化 生产 线来 说 , 完 成 具 体 的 任 务 可 能 由分 布 为 在全 球各 地 的供 应 商提供 的异 构机 器 人 来组 成 。异 构
协 调工 作 。
关键 词 : 构机 器人 ; 异 中间件 ; O B C R A
中 图 分 类 号 :P 1. T 3 11 文 献 标 识 码 : A
Re e r h ofHe e 0 e e us Ro t o io nd Co r se Pltor Ba e s a c t r g n 0 bo s M n t r a ntolSy t m a f m s d on C0RBA FENG o Ru ,Z Gu ・ i HOU Fe g Yu,S n— ONG ng J n,MU o g f n Ho — u L n —a g,LIYiBi — n
技 术 , 蔽 了 异 构 机 器人 之 间 底 层 硬 件 和 上 层 软 件 的 异 构 性 , 异 构 机 器 人 系 统 的 集 成 技 术 进 行 了研 屏 对 究 。 实现 了基 于 C R A 技 术 的 异 构 机 器 人 之 间 数 据 交 互 的 监 控 系 统 平 台 。 极 大 方 便 了 整 个 生 产 线 的 O B
浅谈CORBA技术在E-Learntng中的应用

过的代码。
() 4 版本无关性。 使用C 0 式编
CR A O B 正是为满足这种源IItme的需  ̄ne t 要, 实现软件全方位集成而设计的。
CRA O B 是可以解决跨平台、 跨操作 系统 、 跨语言、 跨协议 、 跨版本问题的一 种方案。 作为分布式软件的用户 , O B CR A 可以使我们得到以下好处 :
程, 版本不但具有向下兼容性, 而且具有 向上兼容性 。 也就是说 , e i 2 的用户 V ro . sn 0
已经存在的软件、 硬件和数据信息。
虑到系统用 户量较 大的特点, 中心服务 器下设 多个代 理服务器, 每个代理服务
器负责一 部分 客户, 客户端通 过本地代
线的机制, 使得异构平台下的各种系统具 施 影响很 小。 我们可以最大限度地重用 象计算技术的典型代表c)B ② 【 A 从一开始 R
分布对象计算技术在远程教育中的
应用, 改变 了传统远程教育系统的结构,
() 1 我们可以使用各种信息、 数据, 无论它们是数字世界的哪个角落。 () 2 我们 可以对信息 、 数据进行各 种自动化 处理 , 无论 它们需要哪个公 司 的哪个 软件。这种处理 是无缝集 成的,
就好像使 用专门编制的软件一样 。
中心服务器是E L ann 系统的核 — erig
解决了传统的远程教育系统的不足。 分布 对象计算技术作为中间件 , 提供了软件总
有 良好的可扩展性和集成性。 作为分布对
程, 实行数据的动态管理。 这种改变、 革 心, 它管理着教学的全部软硬件资源。 考 新对办公室 自动化 、 电子 商务的现有设
产教融合视域下智能控制技术专业校企协同育人模式改革与实践
产教融合视域下智能控制技术专业校企协同育人模式改革与实践作者:宋冬萍于霜王英来源:《现代职业教育》2022年第29期[摘要] 随着中国智能制造2025的持续快速发展,智能控制技術专业迎来了前所未有的发展契机,智能制造技术专业与企业深度融合协同育人,有利于快速提升教学质量,更好地服务产业转型升级。
以苏州工业职业技术学院智能制造技术专业为例,校企协同创新“五教合一,团组融合”人才培养模式,重构“技术模块+X融合”课程体系,探索“校企融合、多元发展”工程创新实践教学,挖掘“新技术、新工艺、新规范”个性化教学内容,构筑“基础+核心+综合+创新”实践实训体系,建设“德技并修、产出高效”的教师创新团队。
[关键词] 产教融合;校企协同育人模式;智能控制技术专业[中图分类号] G715 [文献标志码] A [文章编号] 2096-0603(2022)29-0061-03产教融合是指教育系统与产业系统有机结合,教学与产业密切联系,形成相互支持促进、互惠互利、浑然一体的办学模式。
产教融合、校企合作是职业教育办学的基本模式,也是办好职业教育的关键所在。
2019年7月,国家发展改革委、教育部等6部门印发的《国家产教融合建设试点实施方案》指出:深化产教融合,促进教育链、人才链与产业链、创新链有机衔接,是推动教育优先发展、人才引领发展、产业创新发展、经济高质量发展相互贯通、相互协同、相互促进的战略性举措。
在这一政策背景下,以产教融合为引领的新的人才培养模式逐步成为高校内涵式发展和双高专业群特色发展的“助推器”。
国务院发布的《国家职业教育改革实施方案》(“职教20条”)中明确提到:深化产教融合、校企合作、育训结合、健全多元化办学格局,推动企业深度参与协同育人,扶持鼓励企业和社会力量参与举办各类职业教育。
可见,高职院校与企业协作育人契合当下国家提倡的产教融合发展理念,深化产教融合是当今高职院校的一个改革创新发展方向。
一、智能控制技术专业校企协同育人的意义随着中国智能制造2025的持续快速发展,企业逐渐向智能制造方向转变,智能控制技术专业迎来了前所未有的发展契机。
基于CORBA组件技术的开放式数控组件应用开发
1 数控 系统 的体 系结构和 平台搭 建
目 , 际 主流 的组 件 技 术 主 要 有 M c s t 前 国 i o f 的 ro
C M D O O G的 C R A组件 模型 ( O B o — O / C M,M OB C R A C r n
pnn Moue简 称 C M) Sn公 司 的 E B oet dl。 C 和 u J 。在 支 持
a d d p o itiu e n e ly dsr td NC o b c mpo e t , ih cr n to l e h eli me t fOp N C s se fr n n s whc al o ny me tt er ur x e n so e C n y tm o
fr r l a n -r n e OR o wad a g toi td C l e e BA  ̄ mp n n -a e eh oo y Ope C o e tb d tc n lg s 虹 NC yse ac i cu e n lo s tm rht tr .a d as e
装, 组装 , 部署等应用开发过程进行了详细介绍。
控系统 以其可扩展、 可移植 、 可互换 和可配置等特点 ,
成为当今数控技术发展的趋势。 当今 , 面向对象 的软件复用技 术凭借其 良好 的可 重用性 。 被广泛用 于开放 式数控 系统的开发。但 由于 存在着互操作性差 , 可移植性不强等缺点 , 这一技术正 逐步为组件技术所取代。组件 技术具有可重用性 , 良 好 的语言无关性 , 可以实现跨进程、 跨平台甚至网络范 围内的互操作 , 以较好 的解决软件复用技术所 面临 可
多操作系统 , 多编程语言 , 实时性 , 开放性等方面 , 这三
基于CORBA的多库协同平台研究
本文结合战场抢修决策平台项目的开发,着重研究了多库协同软件的实现方案,设计和实现了基于CORBA 的多库协同平台核心,并应用到机载导弹阵地战场抢修决策中。
1 多库协同软件及其实现方案研究多库协同软件是智能决策支持系统的软件实现技术,是协同运行的、多库一体化的软件系统。
主要包括多库协同器和数据库、模型库、方法库、知识库和人机界面库等相应的管理系统。
多库协同器相当于一个“中介机构”,在各库相应的管理系统的基础上,对各库进行总体控制、协调调度、相互通信,实现资源共享、协同运行的软件。
根据用户需求及环境条件,多库协同软件系统可以采用各种不同类型的软件结构,典型的方案有4种:知识主导型,数据基础型,模型构造型和多库并列型[1]。
1.1 知识主导型多库协同软件知识主导型多库协同软件系统(如图1所示)中,知识起主导作用,由多库协同器、知识库及其管理系统组成了调度专家系统,对各库进行基于知识的调度和管理。
知识主导型多库协同软件结构适用于以专家系统为中心的智能决策支持系统。
图1 知识主导型多库协同软件结构1.2 数据基础型多库协同软件图2 数据基础型多库协同软件结构基金项目:国防“十一五”重点预研项目;空军工程大学优秀博士论文创新基金资助项目(BC06005)作者简介:陈希林(1979-),男,博士研究生,主研方向:武器系统检测自动化与智能化,战场抢修与智能决策;肖明清,博士、教授、博士生导师;王学奇,博士、讲师收稿日期:2007-03-05 E-mail :*************.com—248—数据基础型多库协同软件系统(如图2所示)中,以原有的数据库为基础,增加知识库、模型库、方法库等,协同器实现多库协同工作,提高系统的智能水平。
数据基础型多库协同软件系统适用于已有数据库平台的项目,在充分利用原有数据信息资源的基础上,进一步增加知识信息、智能界面等多媒体信息,提高系统的智能水平,扩展系统人机交互能力以更好地支持决策制定。
KEBA机器人控制系统基础操作与编程应用 教案 教学案例说明盒子涂胶
KEBA控制系统基础操作与编程应用教案章节:一、控制系统概述教学内容:介绍KEBA控制系统的硬件组成、软件界面及其基本功能。
二、控制系统硬件连接教学内容:讲解如何将本体与控制柜进行硬件连接,包括电缆的连接方式和注意事项。
三、控制系统软件操作教学内容:演示如何启动、关闭KEBA控制系统软件,以及如何进行基本操作,如参数设置、程序管理等。
四、运动学基础教学内容:讲解的运动学原理,包括正运动学、逆运动学的概念及其应用。
五、编程基础教学内容:介绍KEBA控制系统编程语言的基本语法,包括变量、函数、语句等。
教学目标:1. 了解KEBA控制系统的硬件组成、软件界面及其基本功能。
2. 学会将本体与控制柜进行硬件连接。
3. 掌握KEBA控制系统软件的基本操作。
4. 理解的运动学原理及其应用。
5. 掌握KEBA控制系统编程语言的基本语法。
教学方法:1. 采用讲授法,讲解理论知识。
2. 采用演示法,展示操作过程。
3. 采用实践法,让学生动手操作,巩固所学知识。
教学准备:1. 准备KEBA控制系统的实物或模型,以便进行讲解和演示。
2. 准备计算机和投影仪,用于展示软件操作和编程示例。
3. 准备相关教材、PPT课件等教学资源。
教学评价:1. 课后作业:要求学生完成相关编程练习,巩固所学知识。
3. 期末考试:考察学生对KEBA控制系统基础操作与编程应用的掌握程度。
教学案例说明-盒子涂胶:1. 教学案例背景:介绍KEBA 控制系统在盒子涂胶应用中的实际应用场景。
2. 教学案例步骤:讲解如何使用KEBA 控制系统进行盒子涂胶的操作流程。
3. 教学案例分析:分析盒子涂胶过程中KEBA 控制系统的关键技术。
4. 教学案例总结:总结KEBA 控制系统在盒子涂胶应用中的优势和注意事项。
六、KEBA控制系统编程实例教学内容:通过具体的编程实例,让学生学会如何编写程序控制完成简单的动作,如直线运动、圆弧运动等。
七、硬件故障排查与维护教学内容:介绍如何对KEBA控制系统进行硬件故障排查和日常维护,以确保的正常运行。
《兵工学报》多关节外骨骼助力机器人发展现状及关键技术分析_宋遒志

Soft Exosuit、PerseusMEA 系统[14],新加坡南洋理工 大学 外 骨 骼 ( NTU Exoskeleton) [15]、勇 士-21[16] 等。 针对搬运弹药、物资及挂弹等任务的全身外骨骼助 力机器人,最具代表性的是 XOS、BE. 1) HULC 和 MIT 外骨骼
在 2004 年 ~ 2008 年,美国加州大学伯克利分 校研发了三代外骨骼 助 力 机 器 人[17 - 18],即 第 一 代 BLEEX、第 二 代 ExoHiker 和 Exoclimber、第 三 代 HULC. 随后在 2009 年,HULC 项目被美国洛克希 德·马 丁 公 司 收 购 ,进 行 了 多 次 实 验 和 改 进 。 其 每 条腿有 7 个自由度,髋关节和膝关节的屈曲 / 伸展 由液压驱动。这一系列外骨骼的参数对比如表 1 所示,其中,第 二 代 两 个 型 号 的 参 数 差 别 较 大,这 是 由 于 其 应 用 目 的 、髋 关 节 驱 动 方 式 不 同 造 成 的 ; ExoHiker 的髋关 节 采 用 的 是 气 弹 簧 被 动 助 力,主 要用于 长 距 离 负 重 行 走 任 务; 而 Exoclimber 是 在 ExoHiker 基础上 进 行 了 改 进,增 加 了 髋 关 节 液 压 缸主动助 力,用 于 长 距 离 负 重 上 下 楼 梯,上 下 坡。 HULC 系统[19]自重为 24 kg( 不含电池) ,最大负重 可以达到 91 kg,搭 载 两 块 总 质 量3. 6 kg的 锂 聚 合 电池( 后续准备研发燃料电池供电系统,工作时间 增加到 72 h) ,可保证穿戴者以4. 8 km / h的速度持 续行进 2 h. 且在无负载的情况下,冲刺速度则可 达到 16 km / h.
基于CORBA实现OPC技术探索

基于CORBA实现OPC技术探索
任学军;郝庆苑
【期刊名称】《陕西电力》
【年(卷),期】2007(35)9
【摘要】OPC(过程控制中的对象链接与嵌入技术)是工业控制和生产自动化领域中硬件和软件之间的接口标准,近年来在电力系统广泛应用.它是一种基于DCOM(分布式组件对象模型)的技术.由于DCOM的平台相关性,不利于OPC技术的进一步应用.而代表分布对象技术主流的CORBA(通用对象请求代理体系结构)技术具有跨平台、语言无关等突出优点,本文尝试采用CORBA技术实现OPC技术.探讨了基于CORBA实现OPC技术的解决方案,通过具体的实现过程展示了方案的可行性,并通过测试用例和应用实例验证了方案的实用性和有效性.基于CORBA实现OPC技术,将大大提OPC技术跨平台、跨语言应用的能力,使其成为一种更广泛适用的标准.
【总页数】4页(P22-25)
【作者】任学军;郝庆苑
【作者单位】西安武警工程学院,陕西西安,710086;陕西电力信通有限公司,陕西,西安,710004
【正文语种】中文
【中图分类】TP303
【相关文献】
1."工控软件互操作规范OPC技术"讲座第7讲基于OPC技术的DCS组态软件的设计与实现 [J], 梁坚;王锦标
2.基于prOpcKit的opc数据访问服务器的设计与实现 [J], 何永亚
3.基于OPC技术实现的主备发射机多节目源切换系统设计与实现 [J], 吴艳明;程田祥;吴艳辉
4.基于OPC UA及OPC DA协议实现的ABB服务器与客户端的数据传输 [J], 连磊
5.基于星形胶质细胞条件培养基的OPC制备技术探索 [J], 杨莹;许雯铱;李聪慧;杨俊林
因版权原因,仅展示原文概要,查看原文内容请购买。
军用轮、腿混合四足机器人设计

军用轮、腿混合四足机器人设计曲梦可;王洪波;荣誉【期刊名称】《兵工学报》【年(卷),期】2018(039)004【摘要】为设计一种可以在迈步行走、有动力轮式机动、无动力轮旱冰式滑行3种运动方式之间灵活转换的轮、腿混合四足机器人,提出一种采用3-PUPS机构的超冗余、可变胞并联机械腿,其构型可以通过伺服电机的抱闸锁定实现变胞变换,从而使机械腿能根据任务需求实时改变自身构型和性能.在建立机械腿3-PUPS机构的运动学和静力学模型基础上,通过定义运动学和静力学性能评价指标,分析了机械腿尺寸参数对其各性能评价指标的影响规律,从而确定机械腿一组使机械腿运动学和静力学性能较为均衡的结构参数,并研制出机械腿的实验样机.建立轮、腿混合四足机器人整机的通用运动学模型,定义机器人整机的性能评价指标,分析机器人整机尺寸参数对其各性能评价指标的影响规律,并确定整机尺寸参数值,在此基础上完成了轮、腿混合四足机器人整机的设计方案.通过一套专用机器人标定系统对机械腿的实验样机进行位姿测量实验.研究结果表明:机械腿运动平台的实际运动沿x轴方向最大偏差为0.041 mm,沿y轴方向最大偏差为0.040 mm,沿z轴方向最大偏差为0.040 mm;绕z轴姿态角最大偏差为0.041°,绕y轴姿态角最大偏差为0.043°,绕x轴姿态角最大偏差为0.045°;机械腿实验样机达到了通用式工业机器人的精度水平.【总页数】11页(P787-797)【作者】曲梦可;王洪波;荣誉【作者单位】河北科技师范学院城市建设学院,河北秦皇岛066004;燕山大学河北省并联机器人与机电系统实验室,河北秦皇岛066004;燕山大学先进锻压成形技术与科学教育部重点实验室,河北秦皇岛066004;燕山大学河北省并联机器人与机电系统实验室,河北秦皇岛066004;燕山大学先进锻压成形技术与科学教育部重点实验室,河北秦皇岛066004;河北科技师范学院城市建设学院,河北秦皇岛066004【正文语种】中文【中图分类】TP242.3【相关文献】1.轮足两用复合式移动机器人轮腿设计及运动分析∗ [J], 魏小彪;魏焕兵;杨玉枝;陆恒;魏田2.四足偏心轮腿机器人的越障研究 [J], 葛耿育;王宇俊3.偏心轮腿六足机器人四足步态规划 [J], 万婷;王宇俊;李君科;何新强4.腿轮混合式六足机器人设计 [J], 李伟洪;黄羽涛;陈桂弟5.四足轮腿式移动机器人的步态分析及轨迹规划 [J], 李清;赵立婷;丰玉玺;刘荣帅;张鹏因版权原因,仅展示原文概要,查看原文内容请购买。
CORBA构件模型中事务集成的研究与设计
CORBA构件模型中事务集成的研究与设计
苏亮;王克波;韩伟红;邹鹏
【期刊名称】《计算机应用研究》
【年(卷),期】2004(021)007
【摘要】对该方案的设计原理作了详细阐述,提出了合理的解决方案,实现了CCM 3.0规范中该部分的所有功能,达到了预期高效与可靠的目的.在CORBA构件模型中集成事务服务,降低了事务性应用开发的复杂度,提高了软件的可靠性和高效性,并将服务与业务逻辑分离,增强了软件的可重用性和可维护性.
【总页数】4页(P108-110,121)
【作者】苏亮;王克波;韩伟红;邹鹏
【作者单位】国防科技大学,计算机学院,网络技术与信息安全研究所,613教研室,湖南,长沙,410073;国防科技大学,计算机学院,网络技术与信息安全研究所,613教研室,湖南,长沙,410073;国防科技大学,计算机学院,网络技术与信息安全研究所,613教研室,湖南,长沙,410073;国防科技大学,计算机学院,网络技术与信息安全研究所,613教研室,湖南,长沙,410073
【正文语种】中文
【中图分类】TP311
【相关文献】
1.CORBA构件模型在指控系统中的应用 [J], 齐文华
2.CORBA构件模型在分布式体系结构中的应用 [J], 张昭理;胡金柱
3.CORBA构件模型中的分布对象事务管理技术 [J], 任怡;韩伟红;贾焰;窦蕾;吴泉源
4.基于CORBA构件模型的应用服务器中容器并发的研究与实现 [J], 肖和平;黄杰;吴泉源;韩伟红;王克波
5.CORBA构件模型的通告服务集成研究与实现 [J], 郑先容;陈强
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1引言火车机车车辆的检测与维护是铁路机务段和机车维护厂的主要任务,检修车间每天需要检测和维护的火车有数十列,每列火车被分解检查,更新部件,然后重新装配后投入运行,工作量巨大。
由于车底盘是磨损消耗最集中的部位,因此火车检修主要是针对车厢底盘。
机车底盘维护流程大体如下:(1)在机车承载两侧取出4组承载耳并检查承载耳;(2)在机车承载两侧取出弹簧组并检查弹簧;(3)翻转机车承载,卸掉交叉杆,检查交叉杆;(4)卸掉机车承载两端的三角梁;(5)在四个八字面上去掉垫片,焊接新的垫片;(6)重新安装机车承载两端的三角梁;(7)重新安装交叉杆,翻转机车承载;(8)重新安装弹簧组;(9)重新安装承载耳。
以上每一步操作持续5-10分钟。
目前国内所有工作都是人工操作,辅以简单的机械设备,自动化水平非常低。
根据上述情况,启动了采用工业机器人流水线实现机车车盘检修自动化的研究。
维修线整体设计布局如图1所示。
图中流程按逆时针方向进行,右侧工作带是步骤1-4,左侧工作带是步骤6-9,中间是步骤5。
步骤5配置了4台焊接机器人,其他步骤都各配置1台机器人,一台移动机器人做为AGV,负责把弹簧和承载耳从黄色工作带运送到绿色工作带。
整个流程包括13台机器人,在研发阶段,步骤3和步骤7使用自行设计制造的特种机器人,使用Pioneer先锋做为AGV,其他步骤使用两台6自由度的MotomanUP6机械手。
在现场应用中,机器人类型以及工位作业不一样,控制方式和通讯协议也不一样,作业流程是分布异构的。
各机器人必基于CORBA的工业机器人软件框架的研究和应用宋洪军,周风余,李贻斌,贾磊SONGHong-jun,ZHOUFeng-yu,LIYi-bin,JIALei山东大学控制学院,济南250061ShandongUniversity,Ji’nan250061,ChinaE-mail:song_hong_jun@163.comSONGHong-jun,ZHOUFeng-yu,LIYi-bin,etal.ResearchandapplicationofCORBA-basedsoftwareframeworkforindustrialrobot.ComputerEngineeringandApplications,2007,43(25):192-196.Abstract:Itistodevelopanextensible,scalableandportablesoftwareframeworkfortrainmaintenanceusingindustrialrobots.ThecoreismiddlewareusingC++CORBA,itexpatiatesatlengthontheframework’sdesignandimplementaion,thetestbedin-cludestwoMotomanUP6manipulatorsandonePioneermobilerobot,theframeworkemploystwo-tierserver.System’sCORBAIDLaredescribedandexplained.Finally,concludingremarksforfutureworksaregiven.Keywords:middleware;CORBA;industrialrobot;trainmaintenance摘要:在国内首次使用中间件技术,面向机车维护机器人生产线,设计开发可扩展,可升级和可移植的软件应用框架。
软件框架的核心是C++CORBA。
试验环境包括2台MotomanUP6机械手和一台Pioneer移动机器人。
详细介绍了软件框架的设计和实现,包括采用两层结构实现服务器,框架的技术指标,系统CORBAIDL的具体设计和定义。
结论部分规划了今后的研究工作。
关键词:中间件;CORBA;工业机器人;机车维护文章编号:1002-8331(2007)25-0192-05文献标识码:A中图分类号:TP242.2基金项目:国家自然科学基金(theNationalNaturalScienceFoundationofChinaunderGrantNo.60675044);教育部博士点基金(No.20050422035);山东省信息产业发展专项资金(No.2005-56);济南市科技型中小企业技术创新专项资金(No.200505-1051)。
作者简介:宋洪军(1975-),男(汉族),博士研究生,从事工业机器人、虚拟现实和工业中间件的研究;周风余,男(汉族),副教授,主要研究智能机器人;李贻斌,男(汉族),博士生导师,主要研究智能机器人;贾磊,男(汉族),博士生导师,主要研究智能交通和复杂系统控制。
须按一定的节拍工作,以确保整个流程在给定时间内完成。
符合现场应用的软件框架要求能够管理工业机器人,调度指定作业,并为作业的编辑,仿真和实时监控提供有效的视觉手段。
根据现场的特性和要求,软件框架采用中间件技术。
目前可用的中间件技术包括CORBA(CommonObjectRequestBrokerArchitecture),Microsoft.NET,IBMSOM,SOAP,RTC,Sun’sJava/RMI等。
软件框架的系统中间件采用C++CORBA,在客户端除了C++CORBA,还使用了Java/RMI。
CORBA是由OMG(ObjectManagementGroup)提出并维护的独立于供应商的标准协议[1],CORBA为可移植的分布式计算应用提供了平台无关的编程接口和服务模型。
由于独立于编程语言,操作系统平台和网络协议,CORBA高度适合于分布式应用系统的集成以及在已有系统内开发新应用软件[2]。
图2展示了CORBA机制内的部件模型,这些部件一起实现了COR-BA的互操作性,可移植性以及其他特性。
其中,客户端和驻留在服务器的各种CORBA对象通过ORB(ObjectRequestBro-ker)互联通讯。
ORB可由不同厂家实现,但是都遵循一致的CORBA协议,对于客户端来说都是透明无区别的。
实时CORBA(RTCORBA:real-timeCORBA)协议[3]扩展了CORBA核心模型以支持实时架构需要。
当前可用的实时CORBA是基于C++和Java的实现。
实时CORBA设计了编程接口,可以在应用程序中配置并控制计算机处理器以及通讯和内存等资源。
由于这些特性,软件框架采用了实时CORBA提供的若干特性和服务。
首先介绍软件框架的试验环境和系统架构,然后阐述了中间件设计的指标和考虑,展示了系统IDL接口的设计和定义,并描述了系统服务器的实现。
2试验环境如图3所示,软件框架的试验环境是基于局域网的,实际包括3个机器人单元,1台网络计算服务器和若干工控PC。
机器人单元中有两个是MotomanUP6机械手及配套的控制器和本地工控机,该机械手有6个自由度,由控制器直接控制,控制器可以通过RS232或以太网卡与一台工控PC连接,如图4所示。
系统服务器的配置如下:(1)操作系统:RedHatAS3;(2)CPU:IntelRXeonTMCPU3.00GHz;(3)RAM:2G;(4)CORBA:TheACE/TAO1.4;(5)数据库:Oracle9iforLinux。
在客户端研发使用3台工控PC,1台运行Linux操作系统用于Pioneer的编程和调试;2台运行Windows,其中1台运行VisualC++和ACE/TAO,用来开发基于CORBA的C/S方式的客户端应用,另外1台安装JDK用来开发基于RMI的B/S方式的客户端应用。
图5说明了客户端应用结构。
按图3,图4,图5设计,整个软件框架的通讯都是基于CORBAIIOP(InternetInter-ORBProtocol)的。
CORBA协议定义了GIOP(GeneralInter-ORBProtocol)做为其互协作的基本框架,但GIOP只是抽象概念定义,不能直接应用于ORB间的通讯。
IIOP是基于TCP/IP的GIOP具体实现,软件框架中,客户端应用与系统服务器的通讯,以及机器人工作单元与系统服务器的通讯都是基于IIOP的。
3系统中间件的设计首先要关注图3和图4,服务器的设计是两层结构,而在[1][4][5][6][7][9]的工作中服务器的设计都是单层结构。
这样设计是因为应用对实时性要求高,如[6]中所论述,在中间件系统中有很多因素导致恶劣的实时性能,包括用户响应,网络传输,CORBA协议处理,CORBA服务处理,显示处理等。
如果所有13部机器人的工作负载以及多个用户的请求处理全部集中于系统主服务器,则系统主服务器就会成为整个系统性能的瓶颈。
为解决此问题,如图4所示,由于具体机器人的行为和控制方式都相对固定,针对每部机器人都配置了一台本地工控PC,设立了CORBA环境,并开发了本地服务程序,专门处理机器人的具体操作。
这样系统主服务器可以专注于高级的综合任务和事务,如作业调度,远程实时监控,作业仿真,系统日志,客户请求处理等。
系统主服务器通过RM(RobotManager)和机器人单元交互,每个机器人在系统主服务器的实时POA(RTPOA:RealTimePortableObjectAdapter)内都驻留着相应的RM(如图6所示)。
RM是主服务器和本地机器人的双重代理,主服务器只和代表机器人的RM交互,不去考虑机器人的具体实现;本地机器人也只和自己的RM交互,不必考虑其驻留的主服务器的设计和实现。
这种关系也体现在图8中。
服务器的两层结构设计分离了应用中的低级具体操作和概念级的高层次服务模型,因此提升了系统的升级扩展能力和可移植性。
当在系统中增加或移除机器人时,只需要配置对应的RM模块而不影响系统整体的概念设计和实现架构,不必考虑机器人具体的操作和相关编码实现。
当主服务器移植到新的硬件服务器或运行新的操作系统时,底层的和机器人相关的应用程序都不必在新环境下重新编译或者改动。
在软件框架中采用了CORBA标准服务,包括命名服务(NamingService),实时事件服务(Real-TimeEventService)和实时日志服务(RTEventbasedLogSevice)。
命名服务是基本的CORBA标准服务,用以提供透明的中间件服务定位。
服务器端驻留并维护着服务对象,并以字符串名字进行广播,客户端可以通过解析这些字符串名字获取所需要的服务对象引用,进而取得所需要的服务,而不必考虑服务对象和服务器的位置和具体实现。
因为要应用于工业现场,采用CORBA的实时日志服务为系统提供日志能力。
在本框架中,用户的所有操作,请求,相应以及系统内所有的事件,异常,运行状态都可以配置到日志记录中。