基于模型的车灯控制系统快速设计与实现_卞永明
智能车灯控制系统设计与实现

智能车灯控制系统设计与实现随着科技的不断发展,智能交通系统已成为当前社会发展的趋势,其中智能车灯控制系统便成为了其中的重要组成部分。
智能车灯控制系统是一种能够根据外界环境变化自动控制车灯开、关的一种系统,其目的在于确保车辆行驶的安全性和便利性。
本文将从智能车灯控制系统的原理入手,详细介绍智能车灯控制系统的设计与实现。
一、智能车灯控制系统的原理智能车灯控制系统主要基于车辆周围环境的变化进行控制,以保证车辆行驶的安全性和便利性。
在车辆行驶过程中,主要应用以下两种原理:1、光线感应原理智能车灯控制系统可以通过感应外界光线强弱,自动调节车灯的亮度和模式。
比如,在晚上行驶时,灯光能够自动点亮,但如果转入开阔空地,则可以自动调整为远光/近光模式。
而在白天行驶时,车灯就会被自动关闭。
2、环境感应原理智能车灯控制系统可以通过感应周围环境的温度、湿度、雾霾等信息,自动控制车灯的开启和关闭。
比如,在天气多雾的情况下,系统能够自动打开雾灯,以提高行车安全系数。
二、智能车灯控制系统的设计和实现1、系统硬件设计智能车灯控制系统的硬件设计主要由光线传感器、环境传感器、单片机、驱动电路、继电器等组成。
光线传感器探测光线的强弱,并将信号传给单片机,单片机根据光线的强弱来控制车灯的亮度和模式。
环境传感器探测周围环境的温度、湿度、雾霾等信息,并将信息传输给单片机,单片机根据环境信息来控制车灯的开启和关闭。
单片机作为系统的核心控制器,控制传感信号的采集和处理,再根据处理结果来控制车灯的开启和关闭。
驱动电路用来驱动车灯的开启和关闭,根据单片机的控制信号,通过继电器来实现对车灯的开启和关闭。
2、系统软件设计智能车灯控制系统的软件设计主要包括信号处理程序和控制程序。
信号处理程序主要用于对光线传感器和环境传感器的信号进行处理,将信号转换为数字信号,并且对数据进行滤波和消噪。
控制程序主要用于对单片机的控制信号进行处理,根据处理结果来控制驱动电路和继电器,进而实现对车灯的控制。
汽车车灯控制系统的设计与实现
1SSN1672-4305 实验室科学第19卷第6期2016年12月CN12-1352/N LABORATORY SCIENCE Vol. 19 No. 6 Dec. 2016汽车车灯控制系统的设计与实现杨华,肖平(东北大学信息科学与工程学院,辽宁沈阳110819)摘要:随着私家车数量的急剧增加,行车安全愈发引起人们的重视。
汽车车灯控制系统作为第一道防线,其合理化设计和高可靠性显得尤为重要。
特别是驾驶员遇到突发事件时,通过控制车灯,及时对其他车辆进 行预警,可有效减少交通事故的发生,避免交通堵塞。
基于数字逻辑系统的综合电路设计,通过虚拟仿真,检验方案的可行性,通过实物电子电路的组装、焊接及调试,实现对汽车车灯的控制。
关键词:汽车车灯;集成电路芯片;计算机仿真中图分类号:TP272 文献标识码:B doi:10.3969/j.issn.1672-4305.2016.06.021Design and implementation of automotive lighting control systemYANG Hua,XIAO Ping(College of Information Science and Engineering,Northeastern University,Shenyang 110819,China) Abstract :With the dramatic increase in the number of private cars,traffic safety increasingly attracted attention.Automotive lighting control system is the first defense line of vehicle safety,and its rationalized design and high reliability are very important.Especially when the driver faced an emergency,who can control the car lights to warn other vehicles,which can effectively reduce traffic accidents and also avoid traffic jams.Based on digital logic circuits and system design,through virtual simulation,circuits assembling,debugging,and experimental validation,the system can achieve the control of the car lights.Key words :car lights;integrated circuit chip;computer simulation现代人的生活空间随着汽车的普及在不断的扩 大,私家车已经成为人们生活中不可缺少的交通工 具。
汽车车灯智能控制系统毕业设计方案

本科生毕业设计(论文)学院:____________________ 专业:____________________ 学生:_____________________ 指导教师:_____________________完成日期年月汽车车灯智能控制系统设计Design of Intelligent Control System for Automobile Lamp总计:24页表格:1个插图:18幅汽车车灯智能控制系统设计Design of Intelligent Control System for Automobile Lamp学院:_______________________________专业:_______________________________学生姓名:_______________________________学号:_______________________________指导教师(职称):________________________评阅教师:完成日期:汽车车灯智能控制系统设计电气工程及其自动化专业[摘要]本系统是基于单片机控制的汽车车灯智能系统,模拟并显示出汽车驾驶过程的灯光控制。
其中主要包括汽车的远近光灯的模拟显示。
具体是通过单片机板上的超声波测距模块和光线感应模块来控制LED灯的亮灭显示状态。
在本设计过程中,通过使用单片机来控制车灯的状态,并把模拟信息在LCD上显示出来,以此加强了对单片机的了解和使用。
[关键词]单片机;电路基础;汽车车灯控制系统;LED灯Design of Intelligent Control System for Automobile Lamp Electrical Engineering and Automation Specialty LI Lin-jie Abstract: This system is the intelligent automobile lamp based on MCU control system simulation and to show the car driving lights control. Including the car made a left turn as far as light, brake and alarm switch, analog display. Is controlled by switching actions of the MCU Board LED lights shows a left turn, right turn, brake and other corresponding State. During the design process, through the use of Protel drawing schematics, makes the circuit more intuitive and deepened understanding of Protel application.Key words: Microcontroller; circuit theory; automobile lamp control system; LED lights目录1 引言 (1)1.1汽车车灯智能控制系统的国内外发展现状 (1)1.2课题研究的意义 (1)2 控制系统方案设计 (1)2.1汽车智能照明系统 (1)2.2汽车车灯智能控制系统中的关键问题 (1)2.3 系统设计的工作原理 (2)3系统的硬件设计 (3)3.1系统各模块硬件设计 (3)3.1.1单片机模块 (3)3.1.2超声波测量距离模块 (4)3.1.3光感应模块 (5)3.1.4系统复位模块 (6)3.1.5A/D转换模块 (7)3.1.6LCD显示模块 (7)3.1.7 继电器模块 (8)3.2系统主电路设计 (8)4系统软件设计及调试 (11)4.1 系统软件流程图 (11)4.2 PCB软件制图 (12)4.3 系统调试 (12)结束语 (14)参考文献 (15)致谢 (19)1 引言1.1汽车车灯智能控制系统的国内外发展现状在对汽车车灯智能控制系统研究的过程中国外那些实力雄厚的汽车制造商对其研究是比较早的,在二十世纪八十年代,国外的一些汽车生产商就完成了汽车的车灯智能控制系统的研究。
基于模糊控制的汽车远光灯智能控制系统的设计

其中 :E为电磁波强度 , 0是入射 电磁波振动方 向与观察方向的夹 角。f此可见 , 拇 散射强度I 与波长的四次方成反比。 就衰减的本质而肓 ,光线在空气中传播时 ,将空气看成某种衰减材 料,传播经历 的光程就相 当于衰减材料的厚度 。每一级的衍射相当于材 料厚度增加了 一个波长的厚度。按照指数关系拟合曲线得到方程:
1 )总体设 计。汽车前照灯采用双丝灯泡 ,分别称作远光灯丝 和近 光灯丝 。常见 的灯泡有两种 :白炽灯泡 :玻璃泡 内充惰性气体 ,减少钨 的蒸发 ,延长灯泡寿命。卤钨灯泡 : 惰性气体中渗入某种 卤族元素 , 利 用卤钨再生循环反应 .进一步提高灯泡的质量 和使用寿命 。远光束亮度 大,照射距 离远 .主要用于高速行驶 ;近光束暗,照射距离近 ,主要用 于会 车。一般何时采用远光灯或近光灯皆由驾驶者操纵,而 且前大灯 的 每组光束强弱是不可调的,角度也是 同定的。传统大灯的照明已经 k l 益 显示 出它的痹端 ,在会 车时 、尤其是在高速公路上会 车,对方的远光灯 会使驾驶员看不清路面,视野狭窄,也容易造成对方驾7 者眩 目. F 极易 引发交通事故。 本 系统 由前照灯控制继 电器 、微处理器和光电传感器等组成。主要 设 备连接 图如 图1 所示 。以卤钨灯泡构成的前照灯为研究对象 ,将光 电 传感器分别安装在车身前照灯的上方 ,左右各一个 , 用来检测汽车正前 方 的光强 ,将检测值经模数转换后传送给微处理器 ,经对 比计算后控制 继 电器 的切 换 ,从 而完 成 对远 光 灯 和 近光 灯 的 自动控 制 功射 ;而瑞利散射的条件是介质 的 >时 不均匀程度a 小于入射 电磁波波长 的十分之一。对于大气分子 、原子引 起的瑞利散射 主要发生在可见光和近红外波段 。综合各项因素分析散射
汽车远近光灯智能控制系统的设计与实现及汽车空调控制系统模拟仿真电路设计(1)

汽车电子设计竞赛汽车远近光灯智能控制系统的设计与实现设计人员:指导老师:完成时间:摘要:本汽车远近光灯智能控制系统分为远光灯和近光灯光强检测部分、汽车环境光强检测并自动调光部分、时钟检测智能开启灯光部分、液晶显示远近光灯亮灭情况部分、主动按键自由控制部分。
整个系统主要以模拟电路为主,配合数字电路控制,全系统通过AT89S52单片机进行全局控制,利用光敏电阻进行可靠的可见光光强检测。
通过论证,本系统能够很好地实现汽车的灯光亮度调节和远近光灯的转换。
关键字:远光灯,近光灯,AT89S52,光强检测,调节光亮度The Auto Distance Headlight Automatic Monitoring Electrical System Abstract: The auto distance headlight automatic monitoring electrical system can be divided into long-and-short distance light force monitoring part, auto environment light force automatic monitoring part, clock monitoring automatic power-on part, liquid crystal displaying long and short distance light on-and-off part, active automatic pressing controlling part. The whole system is focused on analogous circuit and accompanied with digital circuit monitoring. The system controls the whole condition through 51MCU and detects the visible light force brightness by photoresistor reliably. Based on demonstrations, the system can perform auto light force adjustment and long and short distance light transferring.Key words: long distance light short distance light AT89S52, light force detection adjusting light force brightness(一)系统方案:系统方案的选择与论证基本方案论证本设计硬件电路分为系统控制部分、远光灯和近光灯光强检测部分、汽车环境光强检测并自动调光部分、时钟检测智能开启灯光部分、液晶显示远近光灯亮灭情况部分、自动按键自由控制部分六大部分。
基于人工智能的车灯控制系统设计与实现

基于人工智能的车灯控制系统设计与实现第一章:绪论随着人工智能技术的发展和汽车工业的飞速发展,基于人工智能的车灯控制系统逐渐成为汽车行业中的热门话题。
车灯不仅是汽车行驶中的重要组成部分,更是车辆行驶安全的重要标志。
因此,如何设计和实现一种基于人工智能的车灯控制系统,成为当前研究的重点和难点。
第二章:相关技术综述2.1 车灯控制技术汽车的车灯控制技术在过去几十年间已经不断发展,从最简单的手动开关到自动化控制系统。
当前,车灯控制系统已经实现了自动高低光切换和自动光线强度调节等功能,并已经在许多车型中普及使用。
2.2 人工智能技术人工智能技术是一种通过在计算机系统中模拟人类智能的方式,从而使计算机能够像人类一样处理复杂任务的技术。
人工智能技术包括机器学习、深度学习、自然语言处理、推理和规划等技术。
第三章:基于人工智能的车灯控制系统设计3.1 系统架构设计基于人工智能的车灯控制系统采用下列系统架构设计。
首先,系统采用光传感器测量环境光线的亮度。
然后,通过机器学习算法分析光线强度和车速等因素,自动控制车灯开关和光线强度。
3.2 光传感器的选择在设计车灯控制系统时,选择合适的光传感器非常重要。
在此,我们选择使用光敏二极管或光敏电阻作为光传感器进行环境光线测量。
3.3 机器学习算法的设计在本系统中,机器学习算法用于分析车辆的速度和环境光线强度等因素,以帮助自动控制车灯的开关和光线强度。
我们采用支持向量机(SVM)算法作为基础算法,通过对数据进行训练,来优化算法性能。
第四章:系统实现4.1 硬件平台设计在车灯控制系统的实现过程中,我们采用了STM32微控制器作为系统的硬件平台,通过外部电路连接光传感器、车灯等部件。
4.2 软件编写我们采用Keil和CubeMX等工具编写软件,对机器学习算法进行编码实现。
实现时需要考虑到车灯的开关、光线强度调节等需求。
第五章:实验与测试在实验中,我们对车辆的速度、环境光线强度等进行了测试和分析,并对基于人工智能的车灯控制系统进行了测试。
汽车灯光智能控制系统的设计与实现
• 207•ELECTRONICS WORLD ・技术交流引言:汽车前照灯是汽车在夜间或能见度较低的条件下,尤其是在夜间会车和转弯时为司机提供行车道路照明的重要设备,是预防交通事故的主要组成部分。
本文针对汽车前照灯设计了一套灯光智能系统(戚金凤.汽车灯光智能控制系统的研究[J].科技资讯,2014,18(2))。
以单片机为核心,构成汽车前大灯自动调光控制系统,当夜晚行车远光灯打开时,系统能通过光检测输入模块察看前方是否有相对行驶车辆,若有则自动启动调光输出模块,关闭远光并打开近光。
并且能在转弯时汽车前照灯能够随着方向盘转换角度的变化而变化。
能很好地解决传统方式下,手动调光延迟时间长、驾驶员因频繁手动调光而分散注意力和汽车转弯时出现视觉盲区等问题,从而大大减少事故的发生。
1.概述汽车已成为现代社会必不可少的交通运输工具之一,但是,汽车也带来了许多交通问题,因此,必须设法减少交通事故,提高行车安全。
汽车照明系统是汽车的安全部件之一,其主功能就是照亮道路,让驾驶者能够监视道路情况,及时看清障碍物并做出反应,保证汽车在夜间行驶的安全。
但是,在实际的行车过程中,传统的前照灯系统仍然存在很多问题,例如,夜间会车时,为了防止对方目眩,驾驶员在操作远近光灯开关的同时,还需要操作方向,这种同时进行的操作很容易造成事故隐患,对行车安全造成了极大的威胁。
汽车转弯时很容易出现视觉盲区,为了预防此类交通事故,我们提出了汽车灯光智能控制系统的设计方案。
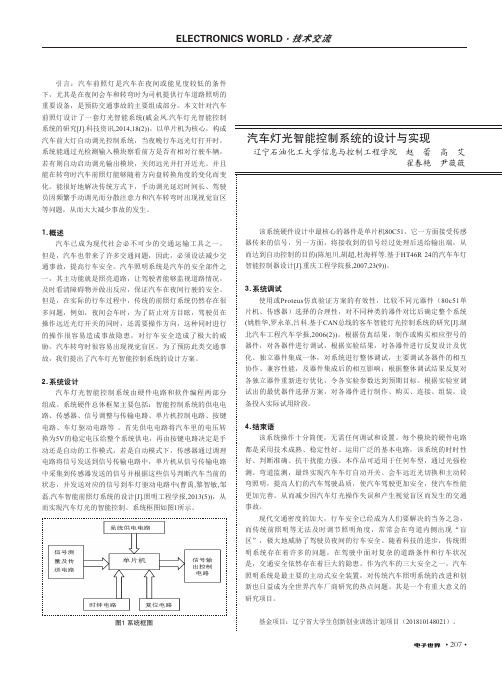
2.系统设计汽车灯光智能控制系统由硬件电路和软件编程两部分组成。
系统硬件总体框架主要包括:智能控制系统的供电电路、传感器、信号调整与传输电路、单片机控制电路、按键电路、车灯驱动电路等 。
首先供电电路将汽车里的电压转换为5V 的稳定电压给整个系统供电,再由按键电路决定是手动还是自动的工作模式,若是自动模式下,传感器通过调理电路将信号发送到信号传输电路中,单片机从信号传输电路中采集到传感器发送的信号并根据这些信号判断汽车当前的状态,并发送对应的信号到车灯驱动电路中(曹禹,黎智敏,邹磊.汽车智能前照灯系统的设计[J].照明工程学报,2013(5)),从而实现汽车灯光的智能控制。
电动汽车的智能车灯控制系统设计

哈尔滨剑桥学院毕业设计论文题目:电动汽车的智能车灯控制系统设计学生:朴永峰指导教师:崔莉讲师专业:电气工程及其自动化班级:12级电气2班2016年5月电动汽车的智能车灯控制系统设计摘要汽车信号灯是汽车的重要组成部分,同样,电动汽车也离不开车灯。
虽然传统的汽车信号灯控制系统种类有很多种,但是,传统信号灯具有使用寿命短、电路设计复杂、性价比低、安全性和可靠性差的缺点。
为了解决传统汽车信号灯控制系统中存在的问题,本文将单片机技术和汽车信号灯进行了有效结合,设计了一种基于单片机的电动汽车智能车灯控制系统。
该系统以单片机作为控制核心,通过单片机对外围电路进行控制。
电动汽车的智能车灯控制系统具有手动控制和自动控制两种控制模式,使用哪种控制模式可以由驾驶员进行自由选择。
本文设计的电动汽车的智能车灯控制系统,融入了很多的人性化设计,拥有良好的人机交互界面,外围电路设计简单实用,具有很好的安全性和稳定性,性价比高,容易进行外围电路扩展,便于后期的软件升级。
关键词:汽车信号灯;单片机;手动控制;自动控制目录摘要 (I)1 绪论 (1)1.1课题研究背景 (1)1.2汽车信号灯的发展 (1)1.2.1汽车信号灯的作用 (1)1.2.2汽车信号灯发展历史 (2)1.3本文研究内容 (3)2 系统总体方案设计 (4)2.1系统设计要求 (4)2.2系统设计方案讨论 (4)2.3系统总体设计方案 (6)3 系统硬件电路设计 (7)3.1系统硬件电路芯片选型 (7)3.1.1单片机的选型 (7)3.1.2ULN2003A芯片 (9)3.1.3光敏电阻 (9)3.1.4LED灯简介 (10)3.1.5 74LS164简介 (11)3.2晶振电路设计 (12)3.3复位电路设计 (13)3.4自动报警模式电路图 (13)3.5ULN2003A连接电路 (15)3.6开关连接电路及功能介绍 (15)3.7LED信号灯连接电路 (16)3.8数码管显示器电路设计 (16)4 系统软件程序设计 (18)4.1编程语言的选择 (18)4.2程序流程图 (18)4.2.1手动模式 (18)4.2.2自动控制模式流程图 (19)5 系统调试 (21)5.1系统硬件调试 (21)5.2系统软件调试 (21)结论 (22)致谢 (23)参考文献 (24)附录 (25)电动汽车的智能车灯控制系统设计1 绪论1.1课题研究背景近年来我国的经济发展迅速,随着国民输入的提高,很多家庭都有了汽车。
汽车车灯智能控制系统毕业设计
汽车车灯智能控制系统毕业设计该智能控制系统是为汽车车灯设计的,其主要目的是增强车辆的安全性和更好的驾驶体验。
该系统使用了许多技术,如图像处理,微控制器和无线通信技术。
这些技术的使用使得该系统能够智能地控制车辆的前灯,后灯和指示灯。
本文将详细介绍该车灯智能控制系统的设计与开发。
概述近年来,随着交通工具的普及,道路上的交通状况也变得更加复杂。
许多交通事故都是由于驾驶员没有足够的警惕性造成的。
因此,需要开发一种车灯智能控制系统来增强行车安全性。
该系统使用了图像处理技术,能够解析车辆前面的路况。
如果路况较暗或天气状况较劣,系统会自动启动前灯。
此外,当车辆行驶到一个照明状态不足的路段时,系统还可以自动控制灯光的角度和亮度,以确保驾驶员的能够获得更好的能见度和更好的行驶体验。
该系统还具有智能指示灯功能,可以智能地识别驾驶员的意图并相应地动作。
例如,当驾驶员向左转时,系统会自动启动左转指示灯,并在转向结束后自动关闭。
这大大方便了驾驶员行驶操作。
系统设计该系统包括一个摄像头、微控制器和无线通信模块。
该摄像头负责获取车道的信息,并传送给微控制器进行图像处理。
该微控制器根据图像处理结果,智能地控制车辆的车灯和指示灯,使其具有更好的适应性和舒适性。
而无线通信模块则负责与其他设备进行数据的互换和通信。
图像处理该系统的核心技术是图像处理。
为了精确地控制前灯和后灯的亮度和角度,需要利用摄像头采集路况图像并对其进行处理。
系统使用基于OpenCV的Python语言进行图像处理。
主要包括以下步骤:- 采集图像并转换为灰度图像- 对图像进行滤波,以去除图像中的噪音- 进行二值化操作,将图像分割为灰度值高于某个阈值的像素和灰度值低于阈值的像素- 对二值化后的图像进行形态学操作,以弥补图像中孔洞等的缺陷- 使用霍夫变换检测出图像中的直线,以便更准确地控制车灯的角度和亮度智能控制该智能控制系统包括前灯、后灯和指示灯。
其中,前灯和后灯自动调节,以适应不同的路面状况和天气条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第11卷第3期2013年6月中 国 工 程 机 械 学 报CHINESE JOURNAL OF CONSTRUCTION MACHINERYVol.11 No.3 Jun.2013作者简介:卞永明(1965-),男,教授,博士生导师.,工学博士.E-mail:ymbianmail@163.com基于模型的车灯控制系统快速设计与实现卞永明,申睿章(同济大学机械与能源工程学院,上海 201804)摘要:以MATLAB软件为平台,研究基于模型的嵌入式软件开发方法.利用Simulink和Stateflow软件对车灯控制系统进行建模与仿真.仿真成功后,对不同的硬件平台直接生成代码,编译下载进行验证与对比分析.实验结果表明:软件代码在目标系统上运行良好,基于模型的方法可针对不同的平台快速进行嵌入式系统的软件开发.关键词:MATLAB软件;嵌入式系统;自动代码生成;模型中图分类号:TP 332 文献标志码:A 文章编号:1672-5581(2013)03-0248-04Model-based rapid design and impelmemtation forcar lamp control systemsBIAN Yong-ming,SHEN Rui-zhang(School of Mechanical Engineering,Tongji University,Shanghai 201804,China)Abstract:By employing the MATLABTM software as a platform,a model-based embedded softwaredevelopment method is investigated.In this regard,the car lamp control system is modelled and simulatedusing SimulinkTM and StateflowTM.Upon completion of simulation,the codes,which are edited anddownloaded for verification and contrasting analysis,are directly generated for different hardwareplatforms.From experimental results,it is detected that the software codes run well in the targetedsystems.In addition,the model-based method can be adapted to different platforms for rapid softwaredevelopment of embedded systems.Key words:MATLAB;embedded system;automatic code generation;model 当前嵌入式系统的传统开发方式中,对于高级RISC微处理器(Advanced RISC Microprocessor,ARM)平台无论是直接操作寄存器还是使用官方提供的库函数,都是利用标准C/C++语言编写源代码,然后经C/C++编译器、汇编器和链接器进行编译链接,最后生成目标可执行代码.对于现场可编程门阵列(Field-Programmable Gate Array,FPGA)平台也需先编写VHDL/Verilog HDL硬件描述语言,然后经仿真综合、布局布线和比特流生成.ARM和FPGA的传统开发方法需开发者手工编制对应规范的嵌入式系统产品代码,增大了产品开发难度,延长了产品的开发周期,从而影响了开发效率.基于模型的设计方法是一种设计复杂系统的可视化方法,其核心技术是代码自动生成技术.采用MATLAB进行算法开发、系统建模和仿真验证,可以方便地修改模型设计,能够在产品设计的早期阶段评估产品的工作性能,发现设计缺陷并能够及时纠正,避免在开发后期发现问题而造成更大的损失.该方法可以避免传统方式下手写代码难度大、效率低、错误多的弊病,带来更低的研发成本、更短的研发周期和更高的产品质量.本文采用MATLAB对车灯控制系统进行系统建模、算法开发和仿真,并分别在以ARM和FPGA为核心的硬件平台中验证.1 基于模型的开发流程基于模型的开发流程如图1所示.确定需求后,在MATLAB/Simulink平台下搭建系统模型(.mdl),仿真满意后通过MATLAB生成工程文件代 第3期卞永明,等:基于模型的车灯控制系统快速设计与实现码(.c.h或hdl),在集成开发环境(IntegratedDevelopment Environment,IDE)中进一步完成代码的编译、链接,或综合、实现,生成可执行的文件(.hex或.elf),最后下载到目标板上运行验证.图1 基于模型的开发流程Fig.1 Model-based development process2 设计目标与开发平台2.1 设计目标设计一个控制软件,用于控制轿车车厢灯.用车门的状态(开门或关门)来控制轿车车灯的状态(灯亮或灯灭).系统功能要求:(1)当一个或多个车站被打开时,车厢灯被点亮.(2)在车厢里有一个手动开关,可以选择如下3种亮灯模式:①灯暗模式———门开时灯也不会亮;②门模式———由门的传感器决定灯是否亮;③灯亮模式———灯被点亮.(3)当车门从外面锁上时,关灯.2.2 开发平台系统建模、算法开发和仿真均使用MATLAB2011a,其中针对ARM平台MATLAB需正确安装RapidSTM32模块集.RapidSTM32是一种针对STM32系列微控制器开发的Simulink目标模块库和设备驱动程序的工具套件[1-2].STM32系列微控制器基于ARM Cortex-M3内核,是一款专为嵌入式应用而开发的内核,具有高性能、低成本、低功耗的特点.ARM与FPGA开发平台的比较如表1所示.3 控制系统建模与仿真系统建模使用MATLAB中的Simulink与Stateflow模块.Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境.在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统.Stateflow是有限状态机的图形工具,它可表1 ARM与FPGA开发平台比较Tab.1 ARM and FPGA development platform平台芯片开发板IDE其他ARM平台STM32F103VCT6DX32开发板RealViewMDK forARM4.0Matlab需安装RapidSTM32模块FPGA平台EP2C5T144C8N红色飓风II代开发板QuartusII 11.0以用于解决复杂的逻辑问题,用户可以通过图形化工具实现在不同状态之间的转换.Stateflow可以直接嵌入到Simulink仿真模型中,并且在仿真的初始化阶段,Simulink会把Stateflow绘制的逻辑图形通过编译程序转换成C语言,使二者有机地结合在一起.完整的模型如图2所示,分别使用两个脉冲发生器来模拟锁门(解锁)和开门(关门)的动作.脉冲发生器1的周期为20ms,脉冲宽度为10ms,延迟设为5ms;脉冲发生器2的周期为10ms,脉冲宽度为5ms,延迟设为3ms.由于状态图中定义的锁门(LockDoor)、开门(OpenDoor)为布尔型变量,故采用数据类型转换(Data Type Conversion)模块对数据类型进行转换.图2 仿真模型Fig.2 Simulation model 模型中Chart(Stateflow的状态图)用图形化的方式完成控制系统的内部逻辑,如图3所示.状态图可分解为3大模块:车门控制模块(DoorControl)完成对车门的有关控制;开关模式控制模块(SwitchControl)对手动开关的状态识别,判断系统的当前模式;灯控制模块(LightControl)完成车灯开关状态的切换.在仿真的过程中,系统运行的当前状态会高亮显示,方便检查逻辑是否正确[3].图4为将手动开关置于门模式时的仿真输出波形.电平为1表示高,电平为0表示低.由输出波形可观察到,当车门未锁并打开时灯亮,当车锁或车门关闭灯不亮,这符合控制逻辑.942 中 国 工 程 机 械 学 报第11卷图3 状态图Fig.3 StateFlow Chart图4 测试输出波形Fig.4 Output waveform4 自动代码的生成与验证在传统的开发流程中,算法经仿真验证可行后,需由人工用C语言或硬件描述语言重新在硬件上实现,加大了工作量,延长了开发周期.但在基于模型的设计中,可由上述仿真模型自动生成代码[4].4.1 ARM平台仿真通过后,将控制输入与输出用实际目标板所使用的硬件端口替换,设置系统时钟等参数,建立如图5所示的模型.主要工作是定义对应硬件平台的输入、输出端口和系统工作的时钟频率.自动代码生成之前需针对硬件平台配置代码生成(Code Generation),进入Simulink的Simulink Configuration Parameters,单击CodeGeneration进入配置界面.具体配置如下:图5 与ARM硬件相关联的模型Fig.5 real hardware model for ARM图6 自动生成的ARM工程文件Fig.6 ARM project file automatically generated System target file:rapidstm32.tlc;RapidSTM32Board:Generic;Cross-Compiler:Realview MDK;STM32Product Line:STM32F103VC.在Code Generation界面点击Build.Matlab将根据设置自动生成STM32相关源文件与链接文件.在MDK软件中新建工程并添加上述生成的代码,直接编译、链接,即生成可在目标板执行HEX文件.下载HEX到目标板上,测试通过.4.2 FPGA平台同理对于FPGA平台,在仿真模型中进入Simulink的仿真配置参数(Simulink ConfigurationParameters),单击HDL代码生成(HDL CodeGeneration)进入配置界面.具体配置如下:Generate HDL for:CarLightHDLLanguage:Verilog选定生成代码的目标文件夹,单击Generate即可在指定目录生成.v和.do文件.上述模型生成的.v文件可以直接加入FPGA工程中使用,.do文件可用于modelsim仿真.在Quartus II中建立工程,经检验可行.5 结论 通过实验验证了应用MATLAB软件进行系统建052 第3期卞永明,等:基于模型的车灯控制系统快速设计与实现 模,并在此基础上进行程序开发的可行性.其优势如下:首先,设计者可以利用SIMULINK友好的可视化建模环境和MATLAB强大的仿真功能对设计的系统进行建模仿真验证,降低了应用门槛.其次,经过仿真验证的算法不需使用手工重新编码,减少了重复劳动,工程师可以将主要精力放在模型的建立上而不是代码的编写上,提升了效率,节省了时间.第三,同一模型可针对不同硬件平台生成对应代码,软件设计可与硬件设计同步并行开发,提高了设计的灵活性.参考文献:[1] 余新栓.基于MATLAB的STM32软件快速开发方法[J].单片机与嵌入式系统应用,2011,11(10):46-48.YU Xinshuan.Rapid development of STM32software basedon MATLAB modeling[J].Microcontrollers &EmbeddedSystems,2011,11(10):46-48.[2] 高炜,张江滨.基于Simulink与硬件的实时数据采集系统的实现[J].电网与清洁能源,2012,28(3):36-39.GAO Wei,ZHANG Jiangbin.Realization of real-time dataacquisition system based on Simulink and hardware[J].Advances of Power System &Hydroelectric Engineering,2012,28(3):36-39.[3] 张威.Stateflow逻辑系统建模[M].西安:西安电子科技大学出版社,2007.ZHANG Wei.Stateflow logic system modeling[M].Xi’an:Xidian University Press,2007.[4] 胥京宇.消除隔阂,提升效率———MATHWORKS推出基于MATLAB生成HDL代码的产品[J].世界电子元器件,2012(5):66-67.XU Jingyu.Eliminate barriers,improve efficiency—TheMATHWORKS launched generate HDL code based onMATLAB[J].Global Electronics China,2012(5):櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅櫅66-67.(上接第242页)的效果,而ωe确定稳态力的大小,较高的ωe可以降低稳态力,但是由材料的特性确定.3 结论本文在弹性域对超声切削过程进行了动态冲击接触的研究,实际冲击时当材料应力达到其极限强度时发生破坏.材料破坏后实际力与位移是接近线性变化的,但是冲击接触过程稳态与动态的作用规律是接近的.根据理论及实验结果的分析,主要内容及结论如下:(1)冲击接触过程的位移与力的动态模型表明,在超声振动加工中,总冲击位移和力中包含动态和稳态位移、力.(2)动态位移、力和稳态位移、力在切削过程中对工件产生不同的作用效果.(3)根据接触过程不同能量对工件的作用揭示了超声振动切削降低切削力、提高工艺系统刚度的实质.超声振动的能量在切削时产生动态应力,它以波动应力的形式作用于工件,所以引起工艺系统颤振的能量大大降低.参考文献:[1] SREEJITH P S.New materials and their machining[J].Int JAdv Manuf Technol,2001,18:537-544.[2] KOMARAIAH M,REDDY P N.Rotary ultrasonicmachining—a new cutting process and its performance[J].International Journal of Production Research,1991,29(11):2177-2187.[3] REIMUND N.Ultrasonic application in drilling[J].Journalof Materials Processing Technology,2004,149:633-639.[4] 皮钧,徐西鹏.超声切削加工中的动压油膜模型建立及其试验研究[J].机械工程学报,2010,46(7):175-180.PI Jun,XU Xipeng.Hydrodynamic pressure oil film modeling andexperimental study of ultrasonic vibration cutting[J].ChineseJournal of Mechanical Engineeying,2010,46(7):175-180.[5] ASTASHEV V K.Ultrasonic cutting as a nonlinear(vibro-impact)process[J].Ultrasonics,1998,36:89-96.[6] 隈部淳一郎.精密加工振动切削:基础与应用[M].北京:机械工业出版社,1985.Kumabe G.Introduction and application of vibration cuttingon precision machining[M].Beijing:China MachinePress,1985.[7] 李祥林,薛万夫,张日昇.振动切削及其在机械加工中的应用[M].北京:科学技术出版社,1985.LI Xianglin,XUE Wanfu,ZHANG Risheng.Vibrationcutting and application in machine[M].Beijing:Scientific &Technical Press,1985.[8] MEYERS M A.材料的动力学行为[M].张庆明,刘彦,黄风雷,等译.北京:国防工业出版社,2006.MEYERS M A.Dynamic behavior of materials[M].ZhangQingming,LIU Yan,HUANG Fenglei,et al,translate.Beijing:National Defence Industry Press,2006.[9] Johnson K L.接触力学[M].徐秉业,罗学富,刘信声,等译.北京:高等教育出版社,1992.Johnson K L.Contact mechanics[M].XU Bingye,LUOXuefu,LIU Xinsheng,et al,translate.Beijing:HigherEducation Press,1992.[10] 加林J A.弹性理论的接触问题[M].王君健,译.北京:科学出版社,1958.ГАЛИНЛА.Contact problems of the theory of elasticity[M].WANG Junjian translate.Beijing:Science Press,1958.152。