基于PLC控制的自动化立体仓库研究及其软件监控系统的开发
基于PLC的立体仓库堆垛机监控系统设计论文

基于PLC的立体仓库堆垛机监控系统设计论文摘要:立体仓库堆垛机是一种高效的货物存储和搬运设备,广泛应用于物流行业。
为了实现对立体仓库堆垛机的监控和控制,本论文基于PLC技术设计了一个立体仓库堆垛机监控系统。
该系统采用了PLC作为主控制器,通过传感器实时监测货物的位置和状态,并通过人机界面呈现给操作员,实现对立体仓库堆垛机的远程监控和控制。
经过实际应用验证,该系统具有高效、稳定和可靠的特点,可以实现对立体仓库堆垛机的自动化管理。
1. 引言立体仓库堆垛机是一种现代化的货物存储和搬运设备,具有高效、快捷和节省空间的特点,被广泛应用于物流行业。
传统的立体仓库堆垛机需要操作员进行人工控制和监控,效率低下且易出错。
为了提升立体仓库堆垛机的工作效率和安全性,本论文设计了一个基于PLC的立体仓库堆垛机监控系统。
2. 系统设计2.1 硬件设计本系统的硬件设计主要包括PLC、传感器和人机界面。
PLC作为主控制器,接收传感器信号并控制输出信号,完成对立体仓库堆垛机的监控和控制任务。
传感器主要用于监测货物的位置和状态,包括货物的高度、重量和是否有货物堵塞等。
人机界面通过显示屏实时显示货物的位置和状态,并提供操作界面给操作员。
2.2 软件设计本系统的软件设计主要包括PLC程序、数据库和人机界面程序。
PLC程序通过读取传感器信号和数据库的数据来实现对立体仓库堆垛机的监控和控制。
数据库存储着货物的位置和状态信息,实时更新并提供给人机界面显示。
人机界面程序通过与PLC进行通信,实现对立体仓库堆垛机的远程监控和控制。
3. 系统实现系统实现过程中,首先进行了硬件的搭建和连接,确保PLC、传感器和人机界面正常工作。
然后编写了PLC程序,对传感器信号进行处理,并根据货物位置和状态控制输出信号。
同时,设计了数据库结构,建立了与PLC程序的数据通信。
最后,开发了人机界面程序,实现了对货物位置和状态的实时监控和控制。
4. 系统评估经过实际应用验证,本系统具有高效、稳定和可靠的特点。
基于PLC的立体仓库控制系统的设计

目录1.绪论 (2)1.1本课题设计的背景 (2)1.2 本课题设计的内容 (3)1.3本课题设计的目的和意义 (4)2.系统控制方案的确定 (4)2.1自动化立体仓库的概述 (4)2.2采用PLC控制立体仓库的优点 (5)2.3系统设计的基本步骤 (5)2.4 系统控制方案 (7)2.5立体仓库技术参数的确定 (9)3.系统硬件设计 (9)3.1 控制系统结构设计 (9)3.2可编程控制器(PLC)的选型 (10)3.2.1 PLC概述 (10)3.2.2 PLC的选型 (11)3.3步进电机的选择 (13)3.3.1 步进电机的原理 (13)3.3.2 步进电机的选择 (13)3.4步进电机驱动器的选择 (16)3.5传感器的选择 (18)3.6微动开关的选择 (20)3.7 PLC输入输出分配表 (20)3.8 电气原理图的设计 (21)4系统控制软件设计 (22)4.1 PLC梯形图概述 (22)4.2 三菱编程软件的特点 (23)4.3 系统流程图 (24)4.4梯形图的设计 (26)5.系统调试及结论 (26)5.1梯形图程序的下载(传送) (26)5.2程序运行过程记录 (27)5.3结论 (28)附录I PLC设计的梯形图 (29)参考文献 (39)摘要随着国民经济的飞速发展,自动化立体仓库必然会在各行各业中得到越来越广泛的应用。
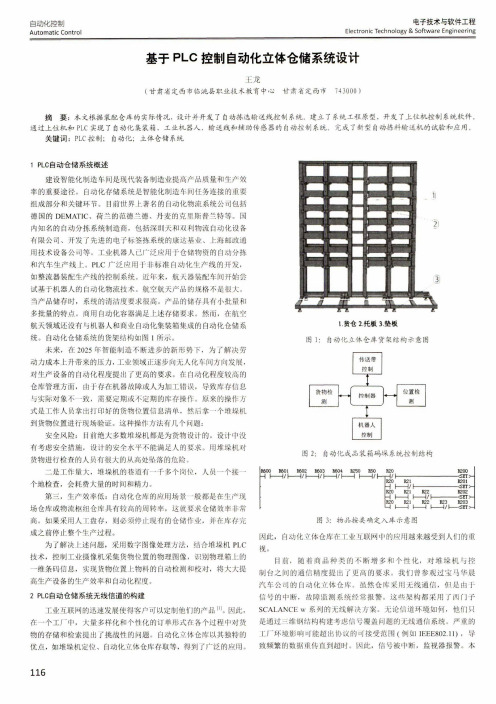
自动化立体仓库是现代物流系统的重要组成部分,是一种多层存放货物的高架仓库系统,由自动控制与管理系统、高位货架、巷道堆垛机、自动入库、自动出库、计算机管理控制系统以及其他辅助设备组成。
本仓库模型控制系统是根据自动化立体仓库运行的基本原理而设计的。
在整个控制系统中以三菱FX2N系列PLC作为核心控制元件,专用键盘作为人机接口部件,控制步进电机来驱动一个有三自由度的仓库模型在高强度导轨上做三维运动。
以步进电机每转输出的脉冲数为基础,通过键盘对每个仓位予以地址编码,通过PLC对命令键盘进行扫描并得到相应的仓位号,当PLC接收到来自键盘的输入命令后,便输出对应仓位的脉冲数,经过驱动器驱动步进电机按设定的方向转动一定的角度,进而控制传动部件丝杠旋转进行准确的定位,以完成货物的存取功能。
基于PLC控制的小型自动化立体仓库设计论文
基于PLC控制的小型自动化立体仓库设计论文摘要:本文针对小型自动化立体仓库的设计问题进行了研究和分析。
在研究中,我们使用PLC(可编程逻辑控制器)作为控制系统,设计了系统的整体框架和工作流程。
通过PLC的编程与控制,实现了仓库内货物的自动分拣、存储和检索。
通过对实验结果的分析,证明了PLC在小型自动化仓库中具有较高的可靠性和稳定性。
关键词:小型自动化仓库;PLC;分拣;存储;检索1. 引言随着物流行业的快速发展,立体仓库成为了提升仓储效率的重要手段之一。
然而,在传统的手动仓库中,仓储管理和货物的分拣存储工作需要大量的人工操作,容易出现人为的错误和低效率等问题。
因此,设计一种基于PLC控制的小型自动化立体仓库系统,成为了解决仓库管理问题的有效途径。
2. 系统设计2.1 系统框架本文设计的小型自动化立体仓库系统主要由输送机、分拣机、储物架和PLC控制系统等组成。
输送机负责将货物从入口运送至分拣机,分拣机根据货物特征进行分类和分拣,然后将货物存储至相应的储物架中。
当需要检索货物时,PLC控制系统根据指令控制储物架将货物送至出口。
2.2 工作流程系统的工作流程主要包括入库、分拣、存储和出库四个阶段。
当货物从入口进入系统后,PLC控制系统将接收到的货物信息进行处理,并将货物送至分拣机。
分拣机根据指定的规则将货物分配到相应的储物架上,同时更新储物架的使用状态。
当需要检索货物时,PLC控制系统根据指令控制储物架将货物送至出口。
3. PLC控制系统设计3.1 硬件设计为了实现对仓库的自动化控制,我们选用了具有高性能和稳定性的PLC控制器。
控制器通过输入输出模块与仓库中的各个设备进行连接,实现数据的传输和控制的执行。
3.2 软件设计在软件设计方面,我们使用PLC的编程软件进行程序的编写和调试。
根据仓库的工作流程和逻辑要求,编写相应的控制程序。
通过PLC控制系统的编程与控制,实现了仓库内货物的自动分拣、存储和检索。
基于PLC控制自动化立体仓储系统设计
自动化控制Automatic Control电子技术与软件工程Electronic Technology & Software Engineering 基于P L C控制自动化立体仓储系统设计王龙(甘肃省定西市临洮县职业技术教育中心甘肃省定西市743000 )摘要:本文根据装配仓库的实际情况,设计并开发了自动拣选输送线控制系统。
建立了系统工程原型,开发了上位机控制系统软件。
通过上位机和PLC实现了自动化集装箱、工业机器人、输送线和辅助传感器的自动控制系统。
完成了新型自动拣料输送机的试验和应用。
关键词:PLC控制;自动化;立体仓储系统1PLC自动仓储系统概述建设智能化制造车间是现代装备制造业提高产品质量和生产效率的重要途径。
自动化存储系统是智能化制造车间任务连接的重要组成部分和关键环节。
目前世界上著名的自动化物流系统公司包括德国的DEMATIC、荷兰的范德兰德、丹麦的克里斯普兰特等。
国内知名的自动分拣系统制造商,包括深圳天和双利物流自动化设备有限公司、幵发了先进的电子标签拣系统的康达基业、上海邮政通用技术设备公司等。
工业机器人己广泛应用于仓储物资的自动分拣和汽车生产线上。
P L C广泛应用于非标准自动化生产线的开发,如整流器装配生产线的控制系统。
近年来,航天器装配车间开始尝试基于机器人的自动化物流技术。
航空航天产品的规格不是很大。
当产品储存时,系统的清洁度要求很高。
产品的储存具有小批量和多批量的特点。
商用自动化容器满足上述存储要求。
然而,在航空航天领域还没有与机器人和商业自动化集装箱集成的自动化仓储系 统。
自动化仓储系统的货架结构如图1所示。
未来,在2025年智能制造不断进步的新形势下,为了解决劳 动力成本上升带来的压力,工业领域正逐步向无人化车间方向发展,对生产设备的自动化程度提出了更高的要求。
在自动化程度较高的 仓库管理方面,由于存在机器故障或人为加工错误,导致库存信息 与实际对象不一致,需要定期或不定期的库存操作。
基于PLC的智能立体仓库控制系统的设计

基于PLC的智能立体仓库控制系统的设计本文介绍了基于PLC的智能立体仓库控制系统的设计背景和目的。
智能立体仓库控制系统的设计是为了提高仓库管理的效率和准确性。
传统的仓库管理往往依赖人工操作,存在着人为因素引起的错误和不稳定性。
而通过引入PLC技术,可以实现仓库内物品的自动化存储和检索,减少了人为操作的影响。
该系统旨在利用PLC控制器对仓库内的货物进行定位、存储和检索。
通过对仓库内的货架和传送带等设备进行精确控制,可以实现快速而准确的货物存放和提取,降低了错误和延误的可能性。
本文将重点介绍智能立体仓库控制系统的设计原理和实现方法。
同时,还将分析该系统的可行性和优点,并探讨了可能遇到的挑战和解决方案。
通过本文的介绍,读者可以了解到基于PLC的智能立体仓库控制系统的设计背景和目的,从而对该系统的应用和实施有更深入的了解。
该智能立体仓库控制系统基于PLC技术,整体架构由硬件和软件组成部分。
硬件组成系统的硬件组成包括以下主要部分:PLC(可编程逻辑控制器):作为系统的核心控制器,负责接收和处理来自不同传感器和执行器的信号,对仓库的运行进行控制和管理。
传感器:用于检测仓库内的各种环境和状态参数,如温度、湿度、货物位置等。
常用的传感器包括温度传感器、湿度传感器、红外线传感器等。
执行器:根据PLC的指令执行相应的动作,如往前或往后移动货物、控制立体仓库的升降等。
常用的执行器包括电机、气缸等。
人机界面(HMI):作为PLC与操作者之间的交互界面,用于显示仓库的运行状态、接收操作者的指令并将其传递给PLC进行相应控制。
软件组成系统的软件组成包括以下主要部分:PLC程序:PLC通过编写逻辑程序进行仓库控制和管理。
该程序可以根据实际需求进行编写,包括货物的存取控制、立体仓库的运行调度等功能。
仓库管理系统:用于监控和管理整个仓库系统的运行。
该系统包括仓库布局管理、货物的信息管理、入库和出库操作的记录与管理等功能。
通信模块:用于PLC与其他设备间的数据传输和通信,包括传感器与PLC之间的数据交互、HMI与PLC之间的指令传输等。
基于PLC的自动化立体仓库控制系统

图 6 摇杆机构示意图 1 摇杆 2 横轴 3 毛毡圈 4位 竖轴下限位 货台回位限位 货台到位限位 货台是否有物 自动 /手动 ( 0 /1)
横轴脉冲 竖轴脉冲 横轴方向 I/O 竖轴方向 I/O
图 2 4 自由度机械手配置图 1 3 号辊道 货台 4 1号辊 道货台 货台 2 2 号辊道货台 5 升降步进电机 3 抓手步进电机 6、 8 堆垛机
4 结束语
实际运行表明该系统工作可靠稳定。基于 PLC 的立体仓库控制系统 具有较高的自动化程度 , 已 经成为生产物流建设 发展的潮流。自动化 仓库与 加工过程相 连, 可构成柔性加 工系统。而 自动化 仓库作为生产物流系 统的枢纽和核心, 是 生产物 流系统实现物流合理化的关键。随着 PLC 技术的 应用和发展 , 自动化立体仓库的实时性和 可靠性 会越来越高, 控制也会越来越完善。
横轴脉冲 竖轴脉冲 横轴方向 竖轴方向 手正转 手反转 底座正转 底座反转 电磁阀动作
横轴正限位 竖轴正限位 横轴反限位 竖轴反限位 手正转限位 手反转限位 底座正限位 底座反限位 旋转脉 冲
3 立体仓库控制系统的软件设计
系统操作过程: ( 1) 机械手操作过程, 主要 完成货物由辊道货台 到堆垛机货台的运送 ; ( 2) 堆垛机操作过程 , 主要完成入库和出库任务。 3 1 机械手操作模式和过程 该实验模型设有 3 个辊道货台和 2 个堆垛机货 台, 货品的运输路线有多种组 合方式, 如 可以将 货品从 1号辊道货台运送到 1 号堆垛机货台; 从 2 号辊道货台运送到 1 号堆垛机货台; 或从 3 号辊道 货台运送到 2 号堆垛机货 台等。每种运送 方式的 路线不相同, 但操作过程基本相同 , 步骤如下: ( 1) 机械手 伸缩、升降 , 转盘和抓手 进行原 点搜索。 ( 2) 机械手的伸缩臂向前 , 当脉冲个数达到 设置值时停止, 同时转盘顺时针旋转到位。 ( 3) 机械手下降 , 当脉冲个 数达到设置值时 停止。 ( 4) 转手电 磁阀动作 , 抓 手抓紧, 从 指定的 辊道货台抓起货物。 ( 5) 机械手上升 , 当脉冲个 数达到设置值时 停止。 ( 6) 机械手的伸缩臂向后 , 当脉冲个数达到 设置值时停止, 同时转盘逆时针旋转到位。 ( 7) 机械手下降 , 当脉冲个 数达到设置值时 停止。 ( 8) 转手电 磁阀动作 , 抓 手放松, 将 货物放 至指定的堆垛机货台。 ( 9) 机械手伸缩、升降, 转盘电机返回原点。 3 2 堆垛机操作 如图 4 所示 , 堆垛机操作分入库和出库 2个主 要流程。 ( 1) 当货台上有货物时 , 若无外部操作指令, 就绪 灯亮, 延时 10 s后, 自动将货物放在仓库 号最小的空位上, 依次类推。如 1 、2 、3 、 4 号都 已有货物 , 程序延时 10 s , 10 s内若无外部操作指 令, 自动将货物放在 5 号仓库。如 1 、3 、 4 号都已 存放货物 , 10 s内若无外部操作指令, 自动将货物 45
基于PLC控制的自动化立体仓库仿真研究

分 别 完成 对 x 轴 和 z轴 的步 进 电机 进 行驱 动 的 器
件 ,主 要 动 作 行 为是 X 轴 的 驱动 器 完 成 与 相 应 的 步进 电机 动作 行 为的断 开 ,z轴 的动作 行为 正好 与 之 相 反 。 与 此 同 时 ,z轴 上 的 步 进 电 机 对 P C控 L
设 定 相 应 的位 移 量 利 用 数 据 的移 位 指 令 且 是 双 字节 的 ,使两 路 分 别位 于 x 轴 和 Y 轴 的 步进 电 机 同时 进 行 反 向的 转 动 ,具 体 的动 作 是 返 回初 始
[ 口
———
} = j
r1 _
位 置 。到 达 后 ,两路 电机 动 作 停 止 回到 初始 位 置 , 13 监 控 系统 .
省 ;实 现 物 料 的随 机 化 的存 储 ;在 物 料 的 利 用 上
12 控 制方 案 设计 .
在 自动 化 立 体 仓 库 系统 中对 物 料 堆 垛 机 的应
保 证 10 0 %,使得 物 料保 证 先进 先 出 ;在 物料 的管
理 上 可 以 做 到 防 盗 以及 防 损 ;减轻 劳 动 强 度 ;实
关键词 : P - L C;自动化 控制 ;自动化 立体仓库 ;监控 系统 中国分 类号 :T 7 P2 3 文献标识码 :A 文章编号 :1 0 - 14 2 i ) 9 下) 0 6 2 9 0 ( o 0 ( - 1 -0 0 3 2 2
D i 1 . 9 9 J is . 0 9 0 . 0 . ( ) 4 o : 3 6 / . n 1 0 - 1 4 2 1 9 下 . 0 0 s 3 2
收稿 日期 :2 1- 7 5 0 2 0 —0 作者简介 :赵洪涛 (9 3 16 一) ,男 ,江苏淮阴人 ,副教授 ,高级 工程 师 ,主要从事 电子技术方面的教学研究工作 。
毕业论文(设计)-基于PLC的自动化立体停车库自动控制系统

PLC控制的立体车库系统设计摘要立体停车库生产在中国是个新兴行业,立体停车库可缓解城市动、静态交通问题,改善居住环境,有效利用土地价值。
本系统采用PLC、计算机结合组态画面监控,按动按钮或控制组态画面即可完成汽车存取过程,操作简单,存取方便。
控制电路部分采用交流接触器传统方式,使运行安全可靠。
设计采用可分组合,模块式安装,方便灵活,具备维护使用方便,造价低等特点。
关键词:立体车库可编程控制器组态监控目录毕业设计(论文)任务书 2 摘要 5 1 引言81.1升降横移式81.2巷道堆垛式82 三菱PLC简介102.1三菱FX2N 系列PLC的性能指标和分类 102.1 PLC模块介绍可编程序控制器的工作方式及编程语言 113 双层立体车库功能介绍 14 3.1立体车库系统组成 14 3.2 PLC核心控制部分 143.3立体车库控制要求 144 立体车库系统设计164.1 PLC选择164.2 I/O口分配164.3 PLC外部接线端口图174.4车位检测部分174.5手动控制部分184.6软件设计18 结论与讨论19 主要参考文献21附录1立体车库原理图22 附录2立体车库总程序241、引言车辆无处停放的问题是城市的社会、经济、交通发展到一定程度产生的结果,立体停车设备的发展在国外,尤其在日本已有近30~40年的历史,无论在技术上还是在经验上均已获得了成功。
我国也于90年代初开始研究开发机械立体停车设备,距今已将近二十年的历程。
由于很多新建小区内住户与车位的配比为1:1,为了解决停车位占地面积与住户商用面积的矛盾,立体机械停车设备以其平均单车占地面积小的独特特性,已被广大用户接受。
机械车库与传统的自然地下车库相比,在许多方面都显示出优越性。
首先,机械车库具有突出的节地优势。
以往的地下车库由于要留出足够的行车通道,平均一辆车就要占据40平方米的面积,而如果采用双层机械车库,可使地面的使用率提高80%—90%,如果采用地上多层(21层)立体式车库的话,50平方米的土地面积上便可存放40辆车,这可以大大地节省有限的土地资源,并节省土建开发成本。
基于PLC下智能仓储控制系统设计的研究

基于PLC下智能仓储控制系统设计的研究PLC程序是现代数字化技术的代表,具有程序灵活、操作简单、实践效率高等优势,能够实现社会技术形式的高效操作,在现代社会资源开发中发挥着程序向导的作用。
基于此,文章结合PLC程序的特征,着重对智能仓储控制系统设计与实践进行探索,发挥PLC程序社会应用的作用,以达到发挥新技术的数字化优势,优化新技术实践策略的目的。
标签:PLC技术;智能仓储控制系统;程序设计Abstract:PLC program is the representative of modern digital technology which has the advantages of flexible procedure,simple operation,high practical efficiency,and can realize the efficient operation of social technology. It plays the role of program guide in the development of modern social resources. Based on this,this paper makes use of the characteristics of PLC program,focusing on the intelligent storage control system design and practice,to give full play to the role of social application of PLC program,in order to achieve the digital advantage of new technology and the purpose of optimizing the practical strategy of new technology.Keywords:PLC technology;intelligent warehousing control system;programming引言隨着社会技术发展水平的综合提升,数字化、智能化技术的应用范围也在进一步拓展。
基于PLC控制的小型自动化立体仓库设计_毕业设计 精品

毕业设计(论文)任务书课题名称基于S7-200 PLC控制的小型自动化立体仓库设计学院电气信息学院专业班级自动化084班姓名学号毕业设计(论文)的主要内容及要求:(1)了解自动化立体仓库的组成及基本功能,熟悉PLC控制系统设计的一般步骤。
(2)结合相关资料设计立体仓库的系统结构图;本课题所设计的立体仓库具有以下功能:1、堆垛机(机械手)要有三个自由度,即:前进、后退;上、下;左、右2、堆垛机的运动由步进电机驱动3、堆垛机前进(或后退)运动和上(或下)运动可同时进行4、堆垛机前进、后退和上、下运动时必须有超限位保护5、每个仓位必须有检测装置(微动开关),当操作有误时发出错误报警信号6、当按完仓位号后,没按入或取前,可以按取消键进行取消该操作7、整个电气控制系统必须设置急停按钮,以防发生意外起止时间:2012 年 2 月21 日至2012 年 6 月 5 日共15 周指导教师签字系主任签字院长签字┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊摘要自动化立体仓库是现代物流系统中迅速发展的一个重要组成部分,是一种多层存放货物的高架仓库系统,由自动控制与管理系统、高位货架、巷道堆垛机、自动入库、自动出库、计算机管理控制系统以及其他辅助设备组成。
它具有节约用地、减轻劳动强度、消除差错、提高仓储自动化水平及管理水平、提高管理和操作人员素质、降低储运损耗、有效地减少流动资金的积压、提高物流效率等诸多优点。
如今我国国民经济的飞速发展,自动化立体仓库必然会在各行各业中得到越来越广泛的应用。
本课题的电气控制主要由西门子公司的PLC、步进电机驱动器、步进电动机、直流电动机等器件组成。
本文首先对本课题进行简要的介绍,包括背景,研究意义,现状等;其次对该系统的硬件组成、结构、原理进行了阐述和分析;再次对本系统用到的器件分别进行介绍,重点对PLC程序进行了编写;最后对设计本课题所学到的知识进行归纳和总结。
基于FactoryIO的PLC虚拟仿真系统设计与实现——以立体仓库堆垛机控制与监控系统设计为例
基于FactoryIO的PLC虚拟仿真系统设计与实现——以立体仓库堆垛机控制与监控系统设计为例基于FactoryIO的PLC虚拟仿真系统设计与实现——以立体仓库堆垛机控制与监控系统设计为例摘要:本文通过使用FactoryIO软件构建PLC虚拟仿真系统,并以立体仓库堆垛机控制与监控系统为例进行了详细的设计与实现。
首先介绍了立体仓库堆垛机的工作原理和控制要求,然后通过FactoryIO软件搭建了仿真环境,并编写了相应的PLC程序进行控制与监控。
通过本次实验,验证了基于FactoryIO的PLC虚拟仿真系统的可行性和有效性。
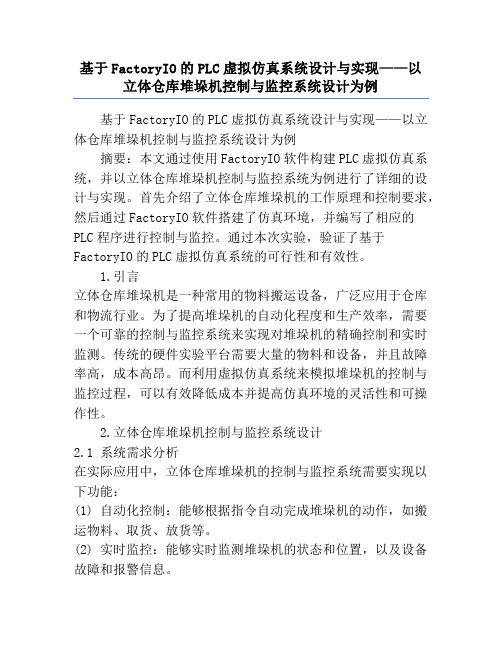
1.引言立体仓库堆垛机是一种常用的物料搬运设备,广泛应用于仓库和物流行业。
为了提高堆垛机的自动化程度和生产效率,需要一个可靠的控制与监控系统来实现对堆垛机的精确控制和实时监测。
传统的硬件实验平台需要大量的物料和设备,并且故障率高,成本高昂。
而利用虚拟仿真系统来模拟堆垛机的控制与监控过程,可以有效降低成本并提高仿真环境的灵活性和可操作性。
2.立体仓库堆垛机控制与监控系统设计2.1 系统需求分析在实际应用中,立体仓库堆垛机的控制与监控系统需要实现以下功能:(1) 自动化控制:能够根据指令自动完成堆垛机的动作,如搬运物料、取货、放货等。
(2) 实时监控:能够实时监测堆垛机的状态和位置,以及设备故障和报警信息。
(3) 故障诊断:能够自动检测和识别设备故障,并给出相应的报警信息和处理建议。
(4) 数据记录与分析:能够记录堆垛机的操作数据,并进行分析和统计,以便于后续优化和改进。
2.2 虚拟仿真环境搭建采用FactoryIO软件,可以快速搭建立体仓库堆垛机的虚拟仿真环境。
首先通过FactoryIO的编辑工具创建场景,包括堆垛机、物料和仓库等元素。
然后设置元素的属性和运动规划,模拟堆垛机的工作过程。
最后,通过连接PLC模拟器,将PLC与场景中的元素进行关联。
2.3 PLC程序设计基于FactoryIO的PLC虚拟仿真系统中,需要编写PLC程序来实现对堆垛机的控制与监控。
基于PLC控制的智能化巷道堆垛式立体车库控制系统的研究与设计
二、巷道堆垛式立体车库的关键 技术
1、自动化控制技术
巷道堆垛式立体车库采用先进的自动化控制技术,包括传感器、控制器和执 行器等,实现了车辆的自动存取和搬运。通过自动化控制,车库可以高效地管理 车辆的存取,缩短了停车时间,提高了服务质量。
2、机械设计技术
巷道堆垛式立体车库的机械设计复杂,需要考虑车辆的尺寸、重量和形状等 因素。机械设计技术的关键是开发出结构合理、性能可靠、易于维护的车库机械 系统,以保证车库的正常运行。
参考内容
随着汽车数量的不断增加,停车问题成为了城市规划和发展中亟待解决的难 题。为了有效地解决这一问题,巷道堆垛式立体车库的研究和应用逐渐受到了人 们的。本次演示将介绍巷道堆垛式立体车库的关键技术及其未来发展趋势。
一、巷道堆垛式立体车库概述
巷道堆垛式立体车库是一种新型的高密度停车设备,它通过在垂直方向上堆 叠车辆,大幅度提高了车位的空间利用率。这种车库通常设置在城市中心、住宅 区和其他有限的停车场地,对于缓解城市停车难问题具有重要意义。
谢谢观看
3、完善信息传播渠道:电信企业应当充分利用客户之间的信息传播,提高 正面的口碑和影响力。同时,通过反馈和评价系统,及时获取客户的反馈,了解 他们的需求和期望,以便进行有效的改进。
4、社区营销:通过举办线上线下的社区活动,将客户聚集在一起,增强他 们的互动和参与感,从而提高他们对品牌的忠诚度和满意度。
二、自我网络特征的介绍
自我网络特征是指个体在社会网络中的属性,包括他们在网络中的位置、与 其他个体的连接程度、影响力等。在电信行业中,客户的自我网络特征可以包括 他们的社交网络结构、与其他客户的互动程度、以及他们在社交网络中的影响力 等。
三、自我网络特征对电信客户流 失的影响
基于plc的工业自动化立体仓库控制系统设计

第21期 收稿日期:2019-09-24作者简介:冉玉梅(1979—),女,山东德州人,讲师,硕士;研究方向:计算机图形处理,工业自动化控制。
基于PLC的工业自动化立体仓库控制系统设计冉玉梅(德州学院机电工程学院,山东德州 253023)摘要:新世纪以来人类对于生活质量的追求逐步提升,许多发明逐渐问世,接过人类生活和工作的重担。
新时代的人们追求解放双手,多付出脑力劳动而非体力,因而对于自动化的需求也在不断增大。
仓库管理工作在此前一直是由人工进行,但人工管理常常出现各种纰漏,导致货物受潮、氧化或是变质等,若是能够借助PLC单片机,实现工业自动化立体仓库的控制系统设计,定能大大改观。
关键词:PLC工业自动化;立体仓库;控制系统;设计方法中图分类号:TQ015.9 文献标识码:A 文章编号:1008-021X(2019)21-0139-02 随着信息化技术的发展,我国工业和建筑行业等都逐渐由传统模式转变为应用机械设备的智能化模式,可以大大提高生产工作效率,为个人、企业带来便利。
除了生产过程的自动化外,还应当发展管理的自动化,例如自动化立体仓库的研究和建设。
PLC相较于其它的单片机,具有强大的功能和过硬的质量,因此可以将其作为仓库控制系统的基础。
1 自动化立体仓库简介自动化立体仓库指的就是在没有人员管理的情况下,可以自主进行货物储存和取出工作的现代化仓库,它的运作模式类似于自动贩卖机,内部设置层层叠叠的货架,并对相应的隔间位置作出编号,将物料置于其中,然后通过控制系统进行自动化管理[1]。
它主要由四个部分组成:1.1 储存设备储存设备指的就是用于存放货物的货架,它分为两种,一种是放置在仓库中、没有与仓库墙体等连接的货架,它们能够取出或者方便地进行转移,而另一种是与仓库建筑物墙体、屋顶等相连的货架,它还起到支撑建筑结构的作用,并且造价较低。
1.2 货物存取设备它指的是货架之间的巷道上架设的能够水平或者垂直移动的堆垛机,它们能够完成货物的装载工作,执行货物存取任务。
基于PLC的自动化立体仓库运行系统设计

展望未来,我们将继续深入研究自动化立体仓库系统相关技术,致力于提高 系统的智能化和自动化水平。我们将物联网技术的发展,探索如何将自动化立体 仓库系统与物联网技术相结合,实现更高效、更智能的仓库管理。另外,我们将 绿色物流的发展趋势,努力提高系统的节能环保性能,为建设可持续发展的物流 行业做出贡献。
然而,在测试过程中,我们也发现了一些问题,如传感器误报、传输带卡滞 等。针对这些问题,我们提出了相应的维护方案,包括:定期检查传感器状态、 定期润滑传输带、定期进行系统备份等。同时,我们为现场技术人员提供了详细 的维护指导,确保了系统的正常运行。
总结本次演示所述,基于西门子PLC的自动化立体仓库系统设计与实现具有 重要的现实意义。该系统有效地提高了仓库管理的效率和准确性,降低了人工成 本,实现了货物的自动化存取、货位的精确控制、货物的有序排列、货物的快速 搬运和信息的实时监控等功能。测试结果表明,该系统性能稳定可靠,具有较高 的实用价值。
1、基于PLC的自动化立体仓库运行系统能够满足现代物流仓储领域对提高空 间利用率、货物搬运效率和仓库管理效率等方面的需求。
2、通过合理设计系统架构、选用高性能PLC控制模块以及优化控制算法和参 数调整等措施,可实现系统的稳定、高效运行,提高企业的物流运作能力和市场 竞争力。
参考内容
随着工业4.0的推进,自动化和智能化成为现代物流仓储的重要发展方向。 其中,自动化立体仓库是实现这一目标的关键设施之一。可编程逻辑控制器 (PLC)作为自动化控制的核心设备,被广泛应用于自动化立体仓库的控制系统 中。本次演示将探讨基于PLC的自动化立体仓库控制系统设计。
5、数据统计与分析:对仓库运行数据进行统计与分析,为管理层提供决策 依据。
为满足上述需求,我们需要借助PLC以及相关的控制技术来实现。
基于PLC的自动化立体仓库实验系统的研制

室 M S自动 生 产线 装 置 ,在仓 库 的硬 件 设 计 上 ,采 P 用 了四层 四列 的 仓 库 模 型 ,将 来 可 以 与 现 有 的 MP S 实现对 接 。物料 选 用 与 现 有 MP S生 产 线 类 似 的橡 胶 块 。建成后 的系统整 体结 构如 图 1 示 。 所 搬 运设 备 是 自动 化立 体仓 库 中的重要 设备 ,其 主
推 动 实 现 。 滚 珠 丝 杠 的结 构 如 图 2所 示 。
所选 用 的丝杠 导程 为 1 0mm,根 据 丝杠 的长度 和
图 2 滚 珠 丝 杠 结 构 图
*江 苏 省 高 等学 校 大 学 生 实 践 创 新 训 练 计划 资助 项 目 ( 教 高 ( 0 9 3 苏 2 0 ) 0号 , 1 8 1 );南 京 化 工 职 业 技 术 学 院 科 研 资 助 项 目 ( HK N Y一2 0 0 ) 0 8— 8 收 稿 日期 :2 1 - 2 0 0 0 1 - 6;修 回 日期 :2 1 —2 1 0 10 ・6 作 者 简 介 :王 江 涛 (9 3 ) 男 , 龙 江 齐 齐哈 尔 人 , 师 , 士 , 要 研 究 方 向 : 电一 体 化 。 17 一 , 黑 讲 硕 主 机
中 图 分 类 号 :T 2 3 P7
文 献 标 识 码 :A
0 引 言
自动化 立 体仓库 系统 ( uo a dSoa ea dR ・ A tm t trg n e e tea S s m,A & S 是 一种 典 型 的 机 电一 体 化 设 r vl yt i e SR 化
21 0 1年 第 3期
电气 控制 系统 包括 主 电路 和 辅助 电路 两 个部 分 。 主 电路主要 由电机 及 与它相 连的 电气 元件 如接触 器主
基于PLC控制的自动化立体仓库设计与组态监控-河北大学
1 引言第二次世界大战之后,工业飞速发展,立体仓库应运而生。
50年代初,美国首先研制出采用桥式堆垛起重机的立体仓库,60年代中期,日本开始兴建立体仓库,并且发展速度越来越快,成为当今世界上拥有自动化立体仓库最多的国家之一。
我国于1963年成功研制出了第一台桥式堆垛起重机,1973年开始研制第一座由计算机控制的自动化立体仓库。
随着当今企业现代化生产规模不断扩大和深化,仓库成为生产物流系统中一个重要而不可或缺的环节,而立体仓库正以其占地面积小和空间使用率佳的特点,正在逐步替代面积利用率低且陈旧落后的平面仓库,这种替代大大提高了仓储物流的水平。
近几年国内外立体仓库的发展方向,以采用可编程控制器(PLC)与微控制搬运设备的仓库以与采用PC机远程管理与PLC联网控制的全自动立体仓库为主。
但其中不容忽视的一个问题是,当前各领域中使用的立体仓库系统通常是比较庞大的,在研发立体仓库的过程中,需要投入大量的人力和财力,这必然会给立体仓库系统的研制带来巨大的成本负担。
目前比较流行的方法是通过制作小型的立体仓库模型,采用可重复使用的编程系统对其进行编程控制,在模型上模拟调试成功后,最后将实验结果应用到立体仓库的实际生产研发中。
通过以上的流程即可节约成本、提高效率,多角度多方式的确定出最优的立体仓库生产方案。
本设计将采用三菱FX1N-40MT型PLC和昆态公司的MCGS组态软件设计一个自动化立体仓库系统模型,最终实现立体仓库系统的自动化、智能化在实际生产中的应用。
2 可编程逻辑控制器(PLC)简介随着微处理器,计算机和数字通信技术的飞速发展,计算机控制几乎已经扩展到了工业领域的每一个角落。
可编程序控制器(Programmable Logic Controller, PLC)作为一种应用面积广,功能强大,使用方便的通用自动控制装备,已经成为工业控制领域不可或缺的重要组成部分。
PLC已经广泛的应用在各种机械设备和生产过程的自动控制系统中,在其他领域也得到了迅速的发展。
基于plc的自动化立体仓库

基于PLC的自动化立体仓库摘要:随着企业现代生产规模的不断扩大,立体仓库已成为生产物流系统中一个重要而不可缺少的环节,堆垛机是其关键设备。
本文的思想是将整个仓库划分为多个区域,然后将每个区域划分为真实和虚拟的位置。
结合虚拟和真实位置,根据货物进出仓库的频率,将货物存储在相应的位置,以提高操作效率。
本文所描述的系统由先进的PLC控制器和变频器驱动的闭环交流伺服系统控制。
光电传感器用于检测堆料机的位置。
分析了堆垛机的工作过程。
研究了堆垛机的运动控制和位置检测方法。
实现了堆垛机的定位方案。
通过上位机系统对PLC 的运行进行监控,对货位信息进行处理,解决了堆垛机对货物访问路径的优化问题。
最后,采用PLC对堆垛机系统进行控制,实现本文设计的堆垛机系统的在线、自动、手动和维护四种控制模式,以及进出站货物运输三种模式。
最后,给出了上位机监控系统的程序实例和主要功能。
通过实验室模拟运行,堆料机系统运行平稳,定位准确,安全可靠地满足设计要求。
关键词:自动化立体仓库;堆垛机;货位优化;监控系统;PLCAutomated Stereo Warehouse Based on PLC Absrtact: With the continuous expansion of modern production scale of enterprises, three-dimensional warehouse has become an important and indispensable link in production logis tics system, and stacker is its key equipment. The idea of this paper is to divide the who le warehouse into several areas, and then divide each area into real and virtual locations. Combining virtual and real locations, according to the frequencies of goods entering and l eaving the warehouse, the goods are stored in the corresponding locations to improve oper ation efficiency. The system described in this paper is controlled by advanced PLC control ler and closed-loop AC servo system driven by frequency converter. The photoelectric sens or is used to detect the position of the stacker. The working process of the stacker is ana lyzed. The movement control and location detection methods of the stacker are studied. T he positioning scheme of the stacker is realized. The operation of PLC is monitored by th e upper computer system, and the information of cargo location is processed, which solves the problem of optimizing the access path of stacker to cargo. Finally, PLC is used to c ontrol the stacker system, realizing the four control modes of online, automatic, manual an d maintenance of the stacker system designed in this paper, and three modes of inbound a nd outbound freight transportation. Finally, an example of the program and the main functi ons of the host computer monitoring system are given. Through the simulation operation o f the laboratory, the stacker system runs smoothly, locates accurately, and meets the design requirements safely and reliably.Key words: Automated three-dimensional warehouse; Stacker; Location optimization; Monit oring system; PLC目录第1章前言 (1)1.1自动化仓库概述 (1)1.1.1自动化立体仓库的组成 (1)1.1.2自动化立体仓库的优点 (1)1.1.3自动化立体仓库的分类 (2)1.2国内外研究现状 (2)第2章出入库原则及方式设计 (3)2.1出入库原则概述 (4)2.1.1先入先出原则 (4)2.1.2分区原则 (4)2.1.3均布原则 (5)2.1.4重力原则 (5)2.1.5效率原则 (6)2.2出入库流程设计 (6)第3章系统组成及硬件连接 (7)3.1工控器件简介 (7)3.1.1工控计算机 (7)3.1.2可编程序控制器(PLC) (7)3.1.3变频器 (9)3.2硬件设备设计 (9)3.2.1出入库系统 (9)3.2.2堆跺机系统 (10)3.3输入输出点分配 (12)3.4输送系统与上位机通信的寄存器区 (15)第4章 PLC控制程序 (15)4.1工作方式控制 (16)4.2手动运行方式下的运行控制 (16)4.3自动运行方式下的运行控制 (17)4.4手/自动工作方式的转换 (18)4.5检修状态 (18)4.6出入货台系统的报警 (19)第5章总结 (21)参考文献 (22)致谢 (23)第1章前言自动化仓储系统是一个不需要直接人工处理就可以自动储存和取出物料的系统。
基于PLC的立体仓库操纵系统的设计【范文仅供参考】

摘要随着国民经济的飞速进展,自动化立体仓库必然会在各行各业中取得愈来愈普遍的应用。
自动化立体仓库是现代物流系统的重要组成部份,是一种多层寄存货物的高架仓库系统,由自动操纵与治理系统、高位货架、巷道堆垛机、自动入库、自动出库、运算机治理操纵系统和其他辅助设备组成。
本仓库模型操纵系统是依照自动化立体仓库运行的大体原理而设计的。
在整个操纵系统中以三菱FX2N系列PLC作为核心操纵元件,专用键盘作为人机接口部件,操纵步进电机来驱动一个有三自由度的仓库模型在高强度导轨上做三维运动。
以步进电机每转输出的脉冲数为基础,通过键盘对每一个仓位予以地址编码,通过PLC对命令键盘进行扫描并取得相应的仓位号,当PLC接收到来自键盘的输入命令后,便输出对应仓位的脉冲数,通过驱动器驱动步进电机按设定的方向转动必然的角度,进而操纵传动部件丝杠旋转进行准确的定位,以完成货物的存取功能。
另外,为了保证整个操纵系统运行的稳固性和靠得住性,咱们还采纳了限位开关对其进行限位爱惜。
本文第一对该课题的可行性及课题实现的现实意义和价值进行了介绍;第二对该系统的硬件组成、结构、原理进行了论述和分析;再次对本操纵系统的核心——软件进行了编写,论文中即有梯形图又有相应的语句表;最后对设计本课题所学到的知识和结论进行归纳和总结,并对本论文有待完善的地址进行扼要的说明。
关键字:立体仓库可编程操纵器(PLC)步进电机物流治理目录1.绪论 ............................................................................................................... 错误!未定义书签。
本课题设计的背景............................................................................... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
江西理工大学应用科学学院 王 凡
[ 摘 要 ] 根据目前自动化立体仓储技术发展的现状, 提出了用 PL C 控制堆垛机等运动部件并用M CGS 工控软件开发
监控系统以监控仓库实时状态的具体方案。 针对中小型仓库, 建立了典型的仓储模型, 讨论了 PL C 控制系统的设计、 仓库监控系统的开发以及监控计算机与现场设备的通讯等问题。 [ 关键词 ] 自动化立体仓库 堆垛机 PL C 监控系统 CGS M
— 83 —
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
科技信息
高校理科研究
— 84 —
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
科技信息
高校理科研究
— 85 —
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.