红外壁障传感器制作
LM393红外避障模块电原理图

LM393红外避障模块电原理图LM393红外避障模块电原理图模块电原理图模块描述该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3V-5V。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
模块参数说明1 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。
其中黑色探测距离小,白色大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO4、比较器采用LM393,工作稳定;5、可采用3-5V直流电源对模块进行供电。
当电源接通时,红色电源指示灯点亮;6、具有3mm的螺丝孔,便于固定、安装;7、电路板尺寸:3.2CM*1.4CM8、模块已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明1 VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)2 GND 外接GND3 OUT 小板数字量输出接口(0和1)4.工作电流是10ma以内如图所示壁障传感器模块。
红外避障传感器工作原理

红外避障传感器工作原理一、引言红外避障传感器是一种常见的电子产品,它通过发射和接收红外信号来检测物体的距离和位置,从而实现避障功能。
本文将详细介绍红外避障传感器的工作原理。
二、红外信号红外信号是指波长在0.75-1000微米之间的电磁波。
人眼无法看到这些波长范围内的光线,但是它们可以被一些电子设备所探测到。
红外信号在工业、医疗、安防等领域有着广泛的应用。
三、红外避障传感器结构红外避障传感器通常由发射模块和接收模块组成。
发射模块负责发射红外信号,接收模块负责接收反射回来的信号,并将其转换为电信号输出。
四、工作原理1. 发射模块发射模块通常由一个红外二极管组成。
当二极管被通电时,会产生一个特定频率和波长的光线。
这个频率和波长通常是38kHz和940nm。
2. 接收模块接收模块通常由一个红外接收头和一个信号处理电路组成。
当发射模块发出红外信号后,如果有物体遮挡在传感器前方,一部分光线会被物体反射回来,并被接收头接收。
接收头将这个信号转换为电信号,并将其送入信号处理电路中。
3. 信号处理信号处理电路通常由一个滤波器和一个比较器组成。
滤波器用于过滤掉杂波和干扰,只保留38kHz的频率。
比较器用于将接收到的信号与一个参考值进行比较,从而判断是否有物体遮挡在传感器前方。
五、应用场景红外避障传感器可以应用于机器人、智能家居、智能车等领域。
它可以检测机器人或车辆前方是否有障碍物,并及时做出反应,从而避免碰撞和损坏。
六、总结红外避障传感器通过发射和接收红外信号来检测物体的距离和位置,从而实现避障功能。
它由发射模块和接收模块组成,其中发射模块负责发射红外信号,接收模块负责接收反射回来的信号,并将其转换为电信号输出。
红外避障传感器在机器人、智能家居、智能车等领域有着广泛的应用。
非制冷红外探测器制作工艺

非制冷红外探测器制作工艺一、衬底准备衬底准备是非制冷红外探测器制作的第一步,其目的是为后续的薄膜沉积提供良好的基础。
这一阶段主要包括以下几个步骤:1.衬底清洗:使用各种清洗方法去除衬底表面的杂质和污染物,确保其表面干净、平整。
2.衬底处理:根据后续工艺需求,对衬底进行适当的处理,如抛光、研磨等,以提高其表面质量。
3.衬底预处理:通过表面改性、涂覆等方式,增强衬底与后续薄膜的结合力。
二、薄膜沉积薄膜沉积是制作非制冷红外探测器的关键环节,涉及到敏感材料、读出电路等多个组件的制备。
这一阶段的主要步骤如下:1.敏感材料沉积:根据设计要求,选择合适的敏感材料(如热敏材料、光电材料等),通过物理或化学方法将其沉积在衬底上。
2.读出电路制备:在衬底上沉积和加工出相应的读出电路,用于探测和传输信号。
3.其他组件制备:根据需要,制备其他辅助组件,如电极、接触点等。
4.薄膜质量检测:通过各种检测手段,确保所制备的薄膜质量符合要求。
三、光刻与刻蚀光刻与刻蚀是非制冷红外探测器制作中实现图形转移的关键技术。
这一阶段主要包括以下步骤:1.光刻准备:对衬底进行涂胶,选择合适的光刻胶,确保与后续刻蚀的兼容性。
2.光刻:将设计好的图形通过曝光的方式转移到光刻胶上。
3.刻蚀:根据光刻后的图案,对衬底进行刻蚀,形成所需的图形结构。
4.去胶:去除残留在衬底上的光刻胶,为后续加工做准备。
四、测试与封装在完成上述工艺步骤后,需要对非制冷红外探测器进行测试和封装,以确保其性能和可靠性。
这一阶段主要包括以下步骤:1.性能测试:对探测器进行各种性能测试,如响应速度、探测率等,确保其达到设计要求。
2.封装保护:对探测器进行适当的封装保护,以防止外界环境对其性能的影响。
常用的封装材料包括陶瓷、金属等。
3.老化与校准:在一定的温度和湿度条件下,对探测器进行长时间的老化处理,以充分暴露潜在问题并采取相应措施进行优化改进。
同时,通过校准手段对探测器的性能进行标定和调整,以确保其在应用中的准确性。
红外感应灯电路设计及原理
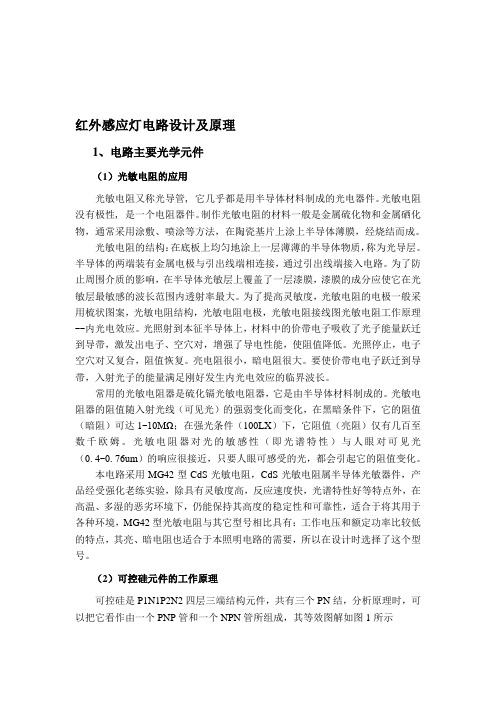
红外感应灯电路设计及原理1、电路主要光学元件(1)光敏电阻的应用光敏电阻又称光导管, 它几乎都是用半导体材料制成的光电器件。
光敏电阻没有极性, 是一个电阻器件。
制作光敏电阻的材料一般是金属硫化物和金属硒化物,通常采用涂敷、喷涂等方法,在陶瓷基片上涂上半导体薄膜,经烧结而成。
光敏电阻的结构:在底板上均匀地涂上一层薄薄的半导体物质,称为光导层。
半导体的两端装有金属电极与引出线端相连接,通过引出线端接入电路。
为了防止周围介质的影响,在半导体光敏层上覆盖了一层漆膜,漆膜的成分应使它在光敏层最敏感的波长范围内透射率最大。
为了提高灵敏度,光敏电阻的电极一般采用梳状图案,光敏电阻结构,光敏电阻电极,光敏电阻接线图光敏电阻工作原理--内光电效应。
光照射到本征半导体上,材料中的价带电子吸收了光子能量跃迁到导带,激发出电子、空穴对,增强了导电性能,使阻值降低。
光照停止,电子空穴对又复合,阻值恢复。
亮电阻很小,暗电阻很大。
要使价带电电子跃迁到导带,入射光子的能量满足刚好发生内光电效应的临界波长。
常用的光敏电阻器是硫化镉光敏电阻器,它是由半导体材料制成的。
光敏电阻器的阻值随入射光线(可见光)的强弱变化而变化,在黑暗条件下,它的阻值(暗阻)可达1-10MΩ;在强光条件(100LX)下,它阻值(亮阻)仅有几百至数千欧姆。
光敏电阻器对光的敏感性(即光谱特性)与人眼对可见光(0.4-0.76um)的响应很接近,只要人眼可感受的光,都会引起它的阻值变化。
本电路采用MG42型CdS光敏电阻,CdS光敏电阻属半导体光敏器件,产品经受强化老练实验,除具有灵敏度高,反应速度快,光谱特性好等特点外,在高温、多湿的恶劣环境下,仍能保持其高度的稳定性和可靠性,适合于将其用于各种环境,MG42型光敏电阻与其它型号相比具有:工作电压和额定功率比较低的特点,其亮、暗电阻也适合于本照明电路的需要,所以在设计时选择了这个型号。
(2)可控硅元件的工作原理可控硅是P1N1P2N2四层三端结构元件,共有三个PN结,分析原理时,可以把它看作由一个PNP管和一个NPN管所组成,其等效图解如图1所示图1可控硅等效图解图当阳极A加上正向电压时,BG1和BG2管均处于放大状态。
红外光电传感器采集电路设计

红外光电传感器采集电路设计近年来,随着科学技术的迅猛发展,特别是红外探测器技术及加工工艺的日益完善,红外辐射探测系统的应用越来越广泛,有着不可替代的作用。
同时,随着使用环境越来越复杂,对红外系统性能的要求也越来越高。
调研发现,在红外辐射系统设计中经常遇到系统的体积、重量、所选材料、使用温度范围等同成象质量及其它技术要求的矛盾,如不很好解决,则难以适应现代红外探测和多波段光谱探测的需要。
在这样的背景下,本课题针对红外预警探测系统的发展,并以其为应用对象,开展红外光学系统设计研究,其研究目的是为先进红外光学系统的设计提供理论基础、设计方法和手段。
整个系统包括硬件设计及软件设计两大部分,其中硬件由红外光发射电路、红外光检测电路、单片机控制电路、报警电路等组成;软件设计主要负责红外光微波信号的产生、红外光接收中断信号的处理、报警信号的传输等。
硬件设计红外采集系统整体设计红外光电传感器采集电路的硬件设计如下图所示,红外光发射电路主要实现红外光的产生和发射,发出的红外光经红外光接收电路负责将接受到的光信号转变成电信号以后送入信号放大及调制电路,信号放大及调制电路将电信号进行放大并进行调制,然后送入到单片机中,单片机进行处理以后发出报警信号,实现报警功能。
红外光发射电路红外光通讯以红外光作为通讯载体,通过红外光在空中的传播来传输数据,从而实现无线传输,硬件部分主要由红外光发射器和红外光接收器来完成。
在红外光发射器电路中,通过单片机软件编程,可以实现STC89C52RC的P3.4输出38kHzPWM红外光载波信号,然后经三极管9013驱动红外光发射管TSAL6200发射出红外光。
其原理图如图1所示。
图1 红外光发射电路原理图红外光检测电路TCRT5000光电传感器模块是基于TCRT5000红外光电传感器设计的一款红外反射式光电开关。
传感器采用高发射功率红外光电二极管和高灵敏度光电晶体管组成,输出信号经施密特电路整形,稳定可靠。
红外避障传感器原理
红外避障传感器原理
红外避障传感器是一种常用的传感器,它利用红外线来检测前
方是否有障碍物,并通过信号输出来实现避障功能。
其原理主要基
于红外线的发射和接收。
首先,红外避障传感器内部包含一个红外发射器和一个红外接
收器。
红外发射器会发射一束红外线,这种红外线在人眼中是看不
见的,但在传感器内部会产生一定的光强。
当这束红外线遇到障碍
物时,会被障碍物反射回来,被红外接收器接收。
其次,红外接收器接收到反射回来的红外线后,会将其转化为
电信号。
这个电信号的强度与红外线的反射程度成正比,也就是说,当有障碍物靠近传感器时,反射回来的红外线会更强,电信号也会
更大。
然后,传感器会根据接收到的电信号来判断前方是否有障碍物。
一般来说,传感器会设定一个阈值,当接收到的电信号超过这个阈
值时,就会输出一个信号,表示检测到了障碍物;反之,则表示前
方没有障碍物。
最后,通过对传感器输出信号的处理,可以实现对障碍物的避让。
比如,可以通过控制机器人的行进方向,使其避开检测到的障
碍物,从而实现避障功能。
总的来说,红外避障传感器的原理是利用红外线的发射和接收,通过检测反射回来的红外线的强度来判断前方是否有障碍物,从而
实现避障功能。
这种传感器在机器人、智能家居等领域有着广泛的
应用,为实现智能化、自动化提供了重要的技术支持。
红外探测报警电路设计

红外探测报警电路设计引言:随着科技的发展,红外探测技术应用得越来越广泛。
红外探测报警电路是基于红外线的探测原理,用于检测人体、动物或其他物体的存在并触发报警。
本文将介绍红外探测报警电路的设计原理、电路组成部分及工作过程。
一、设计原理:红外探测报警电路基本原理是基于红外线被人体或其他物体遮挡时会产生光电转换现象。
红外线在被遮挡之前会被红外发射器发射出去,然后被红外接收器接收。
当有物体遮挡红外线时,红外接收器会停止接收到光信号,进而触发报警。
二、电路组成部分:1.红外发射器:用于发射红外线,通常采用红外发光二极管。
可以通过外部的信号控制发光二极管的开关。
2.红外接收器:用于接收红外线。
接收到的红外线信号会被转换为电信号,作为触发报警的依据。
3.运放电路:用于放大红外接收器输出的微弱电信号,使其能够被后续电子元件处理。
4.报警电路:当红外接收器输出的电信号超过一定阈值时,触发报警。
报警电路可以采用蜂鸣器、灯光或其他报警设备。
5.电源电路:用于为红外发射器、红外接收器、运放电路和报警电路提供所需的电源。
三、工作过程:1.电源电路将电能转换为所需的电源电压,并分别供给红外发射器、红外接收器、运放电路和报警电路。
2.红外发射器发射红外线。
3.红外接收器接收到红外线,并将其转换为电信号输出。
4.运放电路放大红外接收器输出的微弱电信号,使其能够被后续电子元件处理。
5.报警电路检测放大后的电信号,当其超过设定的阈值时,触发报警。
6.报警电路触发报警设备,如蜂鸣器开始发出声音,灯光开始闪烁等。
7.如果没有物体遮挡红外线,红外接收器将持续接收红外线,并保持一个稳定的输出电信号。
四、设计注意事项:1.选择合适的红外发射器和红外接收器,它们的波长应当相互匹配。
2.运放电路应当能够合理放大红外接收器的电信号,同时避免信号失真。
3.设定合适的阈值,以确保报警的准确性和可靠性。
4.选用适宜的报警设备,根据具体需求选择合适的蜂鸣器、灯光等。
红外线障碍物检测电路

红外线障碍物检测电路一、任务设计并制作如图所示的交流调制型红外线障碍物检测电路。
障碍物二、要求采用指定材料:红外收发对管、时基NE555(用于发射)、双运放LM358(用于放大和滤波)和比较器LM393(电平比较),使电路满足下述要求:1、障碍物检测距离:5~30cm,且灵敏度可调;2、检测到障碍物需由LED显示;3、电路能抗外界恒定光线干扰,例如太阳光、室内照明光等;4、电路要有选频特性,能抗周围其他类似电路发射信号的干扰(频率差±20%以外);注:为了避免侧向直射干扰,发射和接收管要加黑色套管。
三、说明(1)障碍物尺寸30×20cm,表面是白色A4纸;(2)制作时应考虑方便测试,合理设置测试点;(3)发射调制频率不宜太高,几KHz以下,太高的话受运放带宽影响,放大倍数也会受影响。
1.通过时基NE555来产生方波,然后再通过红外线向外界发射方波的红外线。
根据公式可求出发射的矩形波的频率多谐振荡器高电平时间:T1=0.693(R1+R2)C低电平时间:T2=0.693R2C振荡周期:T=0.693(R1+2R2)C本次实验实际使用电阻为R1=3kR2=6.6k理想频率为=890.74HZ实际的频率为=1400Hz在输出口3脚的位置串联一个可调电阻和一限流的保护电阻从而达到可在一定范围内调节测量距离的效果。
2.通过运用设计lm358芯片来实现对红外接收管的所得到的信号进行一个信号的运算放大。
根据运算放大的原理放大倍数Av=1+R3/R2V o=Vi*(1+R3/R2)实际中R2=500ΩR3=110kV o=Vi*(1+R3/R2)=111Vi2.利用同一个运算放大器lm358来完成制作一个有源带通滤波器(多路负反馈二阶有源带通滤波器,它使用单个通用运算放大器(通用运放)接成单电源供电模式,易于实现。
它的上限截止频率和下限截止频率可以非常近,具有非常很强的频率选择性。
令C1=C2=C,Req是R1和R2并联的值。
红外感应灯的制作方法
红外感应灯的制作方法红外感应灯是一种常见的自动感应灯,它通过感应人体的热量来自动开启或关闭灯光。
制作一个红外感应灯并不复杂,只需要一些基本的电子技能和简单的材料。
以下是一个制作红外感应灯的方法,希望对你有所帮助。
材料准备:1. Arduino开发板2. 红外传感器模块3. 三极管4. 电阻5. LED灯6. 面包板7. 杜邦线制作步骤:1. 首先,将Arduino开发板放在面包板上,并将红外传感器模块插入到Arduino的数字引脚2。
2. 接下来,将一个三极管的基极连接到Arduino的数字引脚3,收集器连接到Arduino的GND,发射极连接到LED的负极。
3. 在三极管的基极和数据引脚之间加入一个10K欧姆的电阻。
4. 将LED的正极连接到Arduino的数字引脚11,并将一个220欧姆的电阻连接到LED的负极,再将电阻的另一端连接到Arduino的GND。
5. 现在,通过杜邦线将所有部件连接起来。
将Arduino的电源和GND引脚连接到面包板的相应接口上。
6. 使用USB线将Arduino连接到电脑上,并在Arduino IDE中编写代码。
以下是一个简单的红外感应灯的代码示例:```cpp#include <IRremote.h>const int sensorPin = 2; // 红外传感器模块所连接的引脚const int ledPin = 11; // LED灯所连接的引脚IRrecv irrecv(sensorPin);decode_results results;void setup() {Serial.begin(9600);irrecv.enableIRIn(); // 启用红外线接收功能pinMode(ledPin, OUTPUT);}void loop() {if (irrecv.decode(&results)) {// 当红外线接收到信号时,LED灯亮起digitalWrite(ledPin, HIGH);delay(1000);digitalWrite(ledPin, LOW);irrecv.resume(); // 继续接收红外信号}}```7. 在Arduino IDE中上传代码到Arduino开发板中,并将面包板上的线路和电路连接好。
红外避障原理

红外避障原理
红外避障技术是一种利用红外线传感器来检测障碍物并进行避让的技术。
在现代社会中,红外避障技术被广泛应用于各种领域,如智能家居、机器人、自动驾驶等。
其原理是利用红外线传感器发射红外线,当红外线遇到障碍物时,会被障碍物反射回来,传感器接收到这些反射的红外线信号并进行处理,从而判断障碍物的位置和距离,进而实现避障功能。
红外避障技术的原理非常简单,但却非常有效。
红外线传感器是通过发射和接收红外线来实现避障功能的。
当红外线传感器发射红外线时,如果没有障碍物,红外线会直线传播,不会被任何物体反射回来;但是当红外线遇到障碍物时,障碍物会反射一部分红外线回来,传感器接收到这些反射的红外线信号后,就可以根据反射的强弱和时间来判断障碍物的位置和距离。
通过这种方式,红外避障技术可以实现对障碍物的检测和避让,从而保证设备或机器的正常运行。
红外避障技术的应用非常广泛,特别是在智能家居领域。
比如智能吸尘器、智能扫地机器人等设备都采用了红外避障技术,可以有效避免设备碰撞到家具或其他障碍物。
此外,红外避障技术还被
广泛应用于自动驾驶汽车中,可以帮助汽车避免碰撞障碍物,提高行车安全性。
除了以上的应用外,红外避障技术还可以应用于工业自动化领域。
比如在生产线上,红外避障技术可以帮助机器人或自动化设备识别障碍物,从而避免发生意外事故,提高生产效率。
总的来说,红外避障技术是一种简单而有效的技术,通过利用红外线传感器来检测障碍物并进行避让,可以在各个领域发挥重要作用。
随着科技的不断发展,相信红外避障技术会有更广阔的应用前景,为人们的生活和工作带来更多的便利和安全。
YL-62 壁障传感器使用说明

传感器模块使用说明壁障传感器模块使用说明壁障一模块描述该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~80cm,工作电压为3.3V-5V。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
二模块参数说明1当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~80cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。
其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO4、比较器采用LM393,工作稳定;5、可采用3-5V直流电源对模块进行供电。
当电源接通时,红色电源指示灯点亮;6、具有3mm的螺丝孔,便于固定、安装;7、电路板尺寸:3.1CM*1.5CM8、每个模块在发货已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明(33线制)三模块接口说明(1VCC外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)2GND外接GND3OUT小板数字量输出接口(0和1)。
红外避障小车原理介绍及制作

红外避障小车原理介绍及制作引言:红外避障小车是一种能够通过红外线传感器检测前方障碍物并自动转向避免碰撞的智能小车。
本文将介绍红外避障小车的原理及其制作方法。
1. 红外避障小车的原理红外避障小车通过使用红外线传感器识别前方的障碍物。
红外线传感器是一种能够发送和接收红外线信号的装置。
当红外线传感器接收到反射回来的红外线信号时,就会触发避障小车的转向动作。
2. 制作所需材料2.1 电机和轮子:用于小车的驱动和移动;2.2 Arduino控制板:用于编程和控制小车;2.3 红外线传感器:用于检测前方障碍物,并控制小车的方向;2.4 电池盒和电池:用于为小车供电;2.5 连线和焊接工具:用于连接各个组件;2.6 其他辅助材料:如螺丝、螺母等。
3. 制作步骤3.1 连接电机和轮子:首先,将电机通过导线连接到Arduino控制板上。
然后将轮子固定在电机上,确保能够顺利驱动小车移动。
3.2 安装红外线传感器:将红外线传感器连接到Arduino控制板上,确保能够准确接收红外线信号。
3.3 编写程序:使用Arduino的开发环境,编写程序以控制红外避障小车的运动。
程序的逻辑可以设计为:当红外线传感器接收到反射信号时,小车停止前进并进行转向操作,以避免碰撞。
3.4 连接电池盒:将电池盒通过导线连接到Arduino控制板上,以提供小车所需的电力。
3.5 测试运行:将程序上传到Arduino控制板上,并将电池插入电池盒中。
然后测试红外避障小车的运行情况,观察是否能够准确识别障碍物并进行避免碰撞的动作。
4. 使用注意事项4.1 红外线传感器的安装位置需要保持稳定,并且不受外界其他光源的干扰,以确保能够准确接收反射信号。
4.2 程序设计中需要考虑到红外避障小车在遇到障碍物时的反应速度及动作的平稳性,以提高小车的避障性能。
4.3 定期检查电池的电量是否充足,并及时更换电池,以保证小车的正常运行。
5. 经济和实用性分析红外避障小车的制作成本相对较低,所需材料和设备均易获取,并且拥有广泛的应用场景。
光学读出红外探测器的两种制造方法

光学读出红外探测器的两种制造方法
工欲善其事,必先利其器。
在全球化的今天,专利已不仅仅是创新的一种保护手段,它已成为商业战场中的利器。
麦姆斯咨询倾情打造MEMS、传感器以及物联网领域的专利运营平台,整合全产业链知识产权资源,积极推动知识产权保护与有效利用。
光学读出红外探测器的像素结构一般包括:锚、支撑梁(包括双材料梁和隔热梁)和可动微镜。
锚站立于衬底之上,可动微镜通过支撑梁与锚相联接,并悬浮于衬底之上。
双材料梁一般由两种热膨胀系数相差较大的材料构成,如由金属材料和介质材料构成;隔热梁由热导系数较小的材料构成;可动微镜部分一般包括可见光反射层和红外吸收层。
目前的光学读出红外探测器,一般基于硅衬底进行器件结构和工艺设计,其制作方法可以分为两类:
图1 基于表面微机械加工技术制作的光学读出红外探测器一类是采用。
《红外避障小车原理介绍及制作》PPT课件
拖动控制 框调整 大小
商务
图标元素
商务
图标元素
商务
图标元素
商务
图标元素
•功能:本品基于红外传感系统,采用红外传感器实现 前方障碍物检测,来实现自动检测前方障碍物,并能 通过单片机控制舵机实现左、右转弯来避开障碍物。
•应用场合及市场前景:可用于恶劣地理环境中无人驾 驶汽车的物资运输,及玩具小车的自动避障,可见, 自动避障车的应用前景广泛。
二、系统结构框图
三、硬件设计
比例 图号 数量 共 张
第张
组别 第9组
•零件图 电机支架
电 机 支 架 比例 图号 数量 共 张 第张
设计
绘图
组别 第9组
审核
Thank you.
演讲结速,谢谢观赏!
PPT常用编辑图使用方法
1.取消组合
2.填充颜色
3.调整大小
选择您要 用到的 图标单 击右键 选择“ 取消组 合”
右键单击 您要使 用的图 标选择 “填充 ”,选 择任意 颜色
红外避障小车原理介绍及制作
(Suitable for teaching courseware and reports)
一、概述
•设计背景:针对高危环境下对无人化作业的要求,机 器人在复杂地形中行进时自动避障及恶劣环境中无人 驾驶汽车的物资运输,自动避障是一项必不可少也是 最基本的功能设计。另外,市场现在的遥控玩具小车 遇到障碍物时不能自动避开障碍,需人工手动把玩具 车拿开,若加入自动避障功能可省去人工操作。
•系统总设计电路图如下图
•
各部分电路图及说明
•单片机最小系统
•L298电机控制驱动:
各部分电路图
•光耦电路
•电机保护电路
红外探测器原理及电路图

D1发射红外线,D2接收红外信号。
LM567第⑤、⑥脚为译码中心频率设定端,一般通过调整其外接可变电阻W改变捕捉的中心频率。
图中红外载波信号来自LM567的第5角,也即载波信号与捕捉中心频率一致,能够极大的提高抗干扰特性。
音频译码器LM567作用器要领1、LM567输出部分与普通数字IC等有所不同,其内部是一个集电极开路的NPN型三极管,使用时,⑧脚与正电源间必须接一电阻或者其它负载,才能保证IC译码后输出低电平。
2、实验表明:LM567接通电源瞬间,⑧脚会输出一低电平脉冲。
因此,用于作遥控器译码控制时,应在输出端后加装RC积分延时电路,以免每次断电后,重新复电时产生误动作。
3、LM567第⑤、⑥脚为译码中心频率设定端,一般通过调整其外接可变电阻W改变频率,经笔者实验发现,当W阻值变为0Ω或无限大时,⑧脚电平状态即使无信号输入时也会变为低电平,因此,在调整W时,不能使其短路或开路。
4、LM567的工作电压对译码器的中心频率有所影响,故最好采用稳压供电。
5、LM567②脚外接电容决定着锁相环捕捉带宽,容量越小,捕捉带宽越宽,但使用时,不可为增大捕捉带宽而一味减小电容容量,否则,不但会降低抗干扰能力,严重时还会出现误触发现象,降低整机的可靠性1. 概述集成锁相环路解码器LM567是美国国家半导体公司生产的56系列集成锁相环路中的一种,其同类产品还有美国Signetics公司的SE567/INE567等。
LM567是一个高稳定性的低频集成锁相环路解码器,由于其良好的噪声抑制能力和中心频率稳定性而被广泛应用于各种通讯设备中的解码以及AM、FM信号的解调电路中。
2. LM567内部结构及工作原理LM567为8脚直插式封装,其内部结构、引脚定义及外围元件连接方法如图1所示。
LM567内部包含了两个鉴相器PD1及PD2、放大器AMP、电压控制振荡器VCO等单元电路。
鉴相器PD1、PD2均采用双平衡模拟乘法器电路,在输入小信号情况下(约几十mV),其输出为正弦鉴相特性,而在输入大信号情况下(几百mV以上),其输出转变为线性(三角)鉴相特性。
红外传感器工作流程图
红外传感器的工作流程图
人体红外控制自动门电路很简单。
一般由热释电红外传感器、红外信号处理电路、电机驱动电路及机械控制等部分组成。
详见附图。
红外传感器一般都是采用热释电传感器(见图片),这种传感器前面窗口加有一块滤光片,用以滤除1-14μm(人体发出的红外信号为1-14μm)以外的红外线,增加抗干扰能力。
为了提高灵敏度,传感器前面一般要加个菲涅尔透镜(菲涅尔为法国物理学家)。
红外处理电路一般都采用热释电红外处理专用集成电路BISS0001,人体发出的微弱红外信号经该集成电路放大、整形等一系列处理后,输出一个控制信号,该信号再经功率三极管或VMOSFET放大后驱动电机并使机械传动机构工作,从而实现开门&关门。
顺便说一下,现在的自动门有不少都是采用微波多普勒模块,其抗干扰能力及控制范围比热释电传感器的更好一些。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IR Detector
By: Darren Sawicz
Original Documentation By: Jeff Koenig 5. Check the Sharp detector – there shouldn’t be any IR detected, since we turned off the LED. If there is IR detected, go to step X, A valid reflection was detected, so turn on the left LED (red) and bring header pin 4 high. Skip to step 8. No valid detection was made. Return to step one, but this time substitute “right” for “left”
For More Information Please Visit:
WINNIPEG AREA ROBOTICS SOCIETY
2
MARCH 22, 2000
Appendix A
Source Code
; TITLE 'Infra Red Proximity Detector - uses Sharp GP1U581Y' ; LIST P = 12C509, F = INHX8M ; P12C509.INC Standard Header File, Version 1.02 Microchip Technology, Inc. NOLIST ;========================================================================== ; Verify Processor ;========================================================================== IFNDEF __12C509 MESSG "Processor-header file mismatch. Verify selected processor." ENDIF ;========================================================================== ; Register Definitions ;========================================================================== W EQU H'0000' F EQU H'0001' ;----- Register Files ----------------------------------------------------INDF EQU H'0000' ; Uses FSR to address data mem. TMR0 EQU H'0001' ; 8 bit real time clock/counter PCL EQU H'0002' ; Low order 8 bits of PC STATUS EQU H'0003' ; STATUS FSR EQU H'0004' ; Indirect data memory addr pointer OSCCAL EQU H'0005' ; Calibration data for osc. GPIO EQU H'0006' ; General Purpose I/O ;----- STATUS Bits -----------Page 14-------------------------------------GPWUF EQU H'0007' ; GPIO reset bit PA0 EQU H'0005' ; Program Page preselect NOT_TO EQU H'0004' ; Time Out bit NOT_PD EQU H'0003' ; Power Down bit ZERO EQU H'0002' ; Zero bit DC EQU H'0001' ; Digit carry/*borrow bit CARRY EQU H'0000' ; carry/*borrow bit ;----- OPTION Bits -----------Page 15-------------------------------------NOT_GPWU EQU H'0007' ; Enable wake-up on pin change NOT_GPPU EQU H'0006' ; Enable weak pull-ups T0CS EQU H'0005' ; Timer0 clock source select T0SE EQU H'0004' ; Timer0 sources edge select PSA EQU H'0003' ; Prescalar assignment bit PS2 EQU H'0002' ;\ PS1 EQU H'0001' ; > Prescalar rate select bits PS0 EQU H'0000' ;/ ;========================================================================== ; RAM Definition ;========================================================================== __MAXRAM H'3F' ;========================================================================== ; Configuration Bits ;========================================================================== _MCLRE_ON EQU H'0FFF' _MCLRE_OFF EQU H'0FEF' _CP_ON EQU H'0FF7' _CP_OFF EQU H'0FFF' _WDT_ON EQU H'0FFF' _WDT_OFF EQU H'0FFB' _LP_OSC EQU H'0FFC' _XT_OSC EQU H'0FFD' _IntRC_OSC EQU H'0FFE' _ExtRC_OSC EQU H'0FFF' __CONFIG ( _MCLRE_OFF & _CP_OFF & _WDT_OFF & _IntRC_OSC ) ;========================================================================== ; Program Variables ;==========================================================================
1. Flash the 38 kHz square wave through the Left infrared LED for 600 microseconds. Check the Sharp detector – if it detects IR light, go to step 3. If not, go to step X. Good! A reflection was detected. But, it might be from another source, so we will turn off the Left LED and see if the Sharp detector is still seeing infrared illumination (from another source). Keep the Left infrared LED off for 600 microseconds.
The New Board
The new circuit board is smaller than Jeff Koenig's original board. Each new board measures 1.5" x 1". This allows 16 small boards to be cut from a single 4" x 6" board. The original ASCII artwork showed none of the component connections, only component layout. I created a schematic drawing of the circuit to make it easier to see how the circuit is connected. The schematic is included on the last page.
The parts list has been revised to include part numbers from distributors in the Winnipeg Area. Part Description IR Detector Board U1 - PIC 12C508 or 12C509 JP1 - 5 x 1 Header R1 & R2 - 330 Ohm Resistor D1 & D2 - Red LED R3 & R4 - 1k Potentiometer Sharp IR Module 36 kHz D3 & D4 - IR LED Qty. 1 1 1 2 2 2 1 2 Distributor Part Number Winnipeg Area Robotics Society Acti ve # 185-0084 Digi-Key # PIC12C508A-04/P-ND Acti ve # 666-2758 Digi-Key # S1012-36-ND Digi-Key # 330QBK-ND Acti ve – 330 ohm Digi-Key # 67-1402-ND Acti ve # 303-3033 Acti ve # 468-7582 Radio-Shack # 276-137 Acti ve # LD271 Digi-Key # QED423QT-ND