M1u1 L2 Relaxing
matlab 粒子群优化算法 并行计算
一、概述在当今信息化时代,计算机科学和人工智能技术发展迅速,其中优化算法是人工智能领域的重要内容。
粒子裙优化算法是一种新型的优化算法,具有较高的效率和精度。
在大规模数据处理和复杂问题求解中,粒子裙优化算法的并行计算具有重要的意义。
二、粒子裙优化算法简介粒子裙优化算法是一种基于裙体智能的优化算法,模拟了鸟裙觅食的行为。
该算法通过不断调整粒子的位置和速度,以寻找最优解。
在实际问题中,粒子裙优化算法可以应用于函数优化、神经网络训练等领域,取得了良好的效果。
三、粒子裙优化算法的特点1. 并行计算能力强:粒子裙优化算法可以进行并行计算,大大提高了计算效率。
2. 收敛速度快:粒子裙优化算法在迭代过程中具有较快的收敛速度,能够快速找到全局最优解。
3. 对初始化参数不敏感:与其他优化算法相比,粒子裙优化算法对初始化参数的选择不敏感,更加稳定可靠。
四、粒子裙优化算法的并行计算技术1. 并行计算模型:粒子裙优化算法的并行计算可以采用多种模型,如Master-Slave模型、多线程模型等。
2. 分布式计算:在大规模数据处理和复杂问题求解中,粒子裙优化算法可以利用分布式计算技术,将任务分配给多台计算机并行处理。
五、粒子裙优化算法的并行计算应用实例1. 函数优化:粒子裙优化算法的并行计算可以应用于复杂函数的优化问题,如参数调优、最优化设计等。
2. 数据挖掘:在大规模数据处理中,粒子裙优化算法的并行计算能够加快数据挖掘的速度,提高数据处理效率。
3. 多目标优化:粒子裙优化算法的并行计算还可以应用于多目标优化问题,寻找具有多个约束条件的最优解。
六、粒子裙优化算法的并行计算技术研究进展1. 底层技术优化:针对并行计算中的计算速度和存储空间等问题,研究者们对粒子裙优化算法的底层技术进行了优化,提高了算法的效率和稳定性。
2. 并行计算环境:研究者们还研究了粒子裙优化算法在不同并行计算环境下的性能表现,如集裙计算、云计算等。
七、粒子裙优化算法的并行计算未来发展趋势1. 大规模数据计算:随着大数据时代的到来,粒子裙优化算法的并行计算将在大规模数据处理方面发挥更大的作用。
初二下册M1U1

Module 1 HobbiesUnit 1 Do you collect anything?课型:听说课【学习目标】1.知识目标:a.掌握有关业余爱好的单词和短语;b.了解六种句子结构;c.掌握一般疑问句和特殊疑问句的语调。
2. 能力目标:能听懂有关业余爱好的简短对话,辨别多种爱好;能简单问答或者介绍自己的业余爱好。
3.情感目标:通过谈论爱好培养对他人不同爱好的尊重,维持良好的人际关系。
【教学重难点】:了解并会运用六种基本句型。
【教学过程】[课前朗读]: 朗读collect, collection, tidy, tidy up, doll, fan, stamp, untidy, least, take up, all the time, be interested in, interview, wow根据音标读出单词并了解汉语意思,养成学生自主学习词汇的习惯,促使学生迅速进入学习状态。
[检查词汇预习]:a.采取学生结对、小组互查等形式来检查学生对词汇的预习情况。
b.朗读单词,注意发音。
一、情境导入教师可问学生:What’s your hobby? What do you like to do in your spare time? Do you collect anything? 这样会调动学生用英语思维的积极性, 通过小组间互相了解导入新课。
二、小听力(自主完成,合作释疑)1.听Activity 1,选出Tony, Tony’s mum 和Tony’s dad 分别喜欢收集什么。
通过图片形式降低了听的难度。
2.Activity 2, Listen and ask and answer the questions, use the words in the box.如果学生回答不出来,可以再听一遍。
三、大听力多层听1. 听activity 3选择正确答案。
1)How many fans has Lingling got?A.F ifty.B. Sixty.C.Fifty or sixty.2) What does Sally’s brother collect?A. Tickets.B. Dolls.C. Stamps.3) When did Sally get her first Violin?A.E ight years ago.B. Ten years ago.C. Nine years ago.4) What has brought Sally to China?A.C ollecting dolls.B. Music.C. Her father.2. Listen again,finish activity 4, write notes, 完成后让学生小组内交流答案。
Kuebler 标准计数器B系列说明书
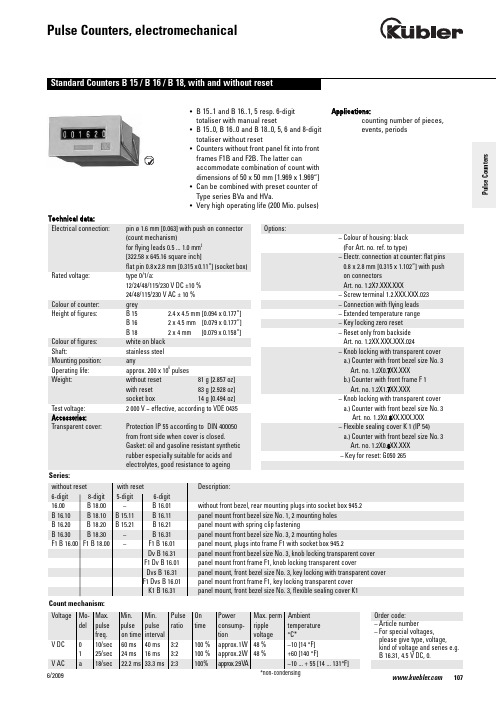
1076/2009• B 15..1 and B 16..1, 5 resp. 6-digit totaliser with manual reset• B 15..0, B 16..0 and B 18..0, 5, 6 and 8-digit totaliser without reset• Counters without front panel fit into front frames F1B and F2B. The latter canaccommodate combination of count with dimensions of 50 x 50 mm [1.969 x 1.969“]• Can be combined with preset counter of Type series BVa and HVa.• Very high operating life (200 Mio. pulses)Applications:counting number of pieces, events, periodsTechnical data:Electrical connection:pin ø 1.6 mm [0.063] with push on connector (count mechanism)for flying leads 0.5 ... 1.0 mm 2[322.58 x 645.16 square inch]flat pin 0.8x2.8 mm [0.315x0.11“] (socket box)Rated voltage:type 0/1/a:12/24/48/115/230 V DC ±10 % 24/48/115/230 V AC ± 10 %Colour of counter:grey Height of figures:B 15 2.4 x 4.5 mm [0.094 x 0.177“] B 16 2 x 4.5 mm [0.079 x 0.177“] B 18 2 x 4 mm [0.079 x 0.158“] Colour of figures:white on black Shaft:stainless steel Mounting position:anyOperating life:approx. 200 x 106pulses Weight:without reset 81 g [2.857 oz]with reset 83 g [2.928 oz]socket box 14 g [0.494 oz]Test voltage: 2 000 V ~ effective, according to VDE 0435Accessories:Transparent cover:Protection IP 55 according to DIN 400050 from front side when cover is closed.Gasket: oil and gasoline resistant synthetic rubber especially suitable for acids and electrolytes, good resistance to ageingOptions:– Colour of housing: black (For Art. no. ref. to type)– Electr. connection at counter: flat pins 0.8 x 2.8 mm [0.315 x 1.102“] with push on connectorsArt. no. 1.2X7.XXX.XXX–Screw terminal 1.2.XXX.XXX.023– Connection with flying leads – Extended temperature range – Key locking zero reset –Reset only from backside Art. no. 1.2XX.XXX.XXX.024– Knob locking with transparent cover a.) Counter with front bezel size No. 3Art. no. 1.2X0.7XX.XXXb.) Counter with front frame F 1Art. no. 1.2X1.7XX.XXX– Knob locking with transparent cover a.) Counter with front bezel size No. 3Art. no. 1.2X0.8XX.XXX.XXX – Flexible sealing cover K 1 (IP 54)a.) Counter with front bezel size No. 3Art. no. 1.2X0.6XX.XXX –Key for reset: G050 265Order code:– Article number– For special voltages,please give type, voltage,kind of voltage and series e.g. B 16.31, 4.5 V DC, 0.P u l s e C o u n t e r sType B 16.00B 16.0012 V24 V115 V230 V(6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.002.012 1.230.002.013DC (25 Imp/s) 1.230.002.032 1.230.002.033AC (18 Imp/s) 1.230.002.061 1.230.002.064 1.230.002.066Standard colour: beigeColour of housing black:Art. no. 1.230.001.XXXType B 18.00B 18.0012 V24 V115 V230 V(8-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.260.002.012 1.260.002.013*DC (25 Imp/s) 1.260.002.032 1.260.002.033*AC (18 Imp/s) 1.260.002.061 1.260.002.064 1.260.002.066Standard colour: beigeColour of housing black:Art. no. 1.260.001.XXXFurther stock models: 1.260.001.013 Type B 16.10B 16.1012 V24 V115 V230 V(6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.100.012 1.230.100.013DC (25 Imp/s) 1.230.100.032 1.230.100.033AC (18 Imp/s) 1.230.100.061 1.230.100.064 1.230.100.066*standard stock modelStandard colour: grey6/2009Type B 18.10B 18.1012 V24 V115 V230 V(8-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.260.100.012 1.260.100.013*DC (25 Imp/s) 1.260.100.032 1.260.100.033*AC (18 Imp/s) 1.260.100.061 1.260.100.064 1.260.100.066Standard colour: greyColour of housing black:Art. no. 1.260.101.XXXType B 16.20B 16.2012 V24 V115 V230 V(6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.200.012 1.230.200.013*DC (25 Imp/s) 1.230.200.032 1.230.200.033*AC (18 Imp/s) 1.230.200.061 1.230.200.064 1.230.200.066Standard colour: greyColour of housing black:Art. no. 1.230.201.XXXFurther stock models1.237.201.066230 V AC/a flat pinsType B 18.20B 18.2012 V24 V115 V230 V(8-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.260.200.012 1.260.200.013*DC (25 Imp/s) 1.260.200.032 1.260.200.033*AC (18 Imp/s) 1.260.200.061 1.260.200.064 1.260.200.066*Standard colour: greyColour of housing black:Art. no. 1.260.201.XXXFurther stock models1.260.201.013, 1.260.201.066*standard stock modelPulseCounters1096/20091106/2009Type B 16.30B 16.3012 V 24 V 115 V 230 V (6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.300.012 1.230.300.013DC (25 Imp/s) 1.230.300.0321.230.300.033AC (18 Imp/s)1.230.300.0611.230.300.064 1.230.300.066Standard colour: grey Colour of housing black:Art. no. 1.230.301.XXXType B 18.30B 18.3012 V 24 V 115 V 230 V (8-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.260.300.012 1.260.300.013DC (25 Imp/s) 1.260.300.0321.260.300.033AC (18 Imp/s)1.260.300.0611.260.300.064 1.260.300.066Standard colour: grey Colour of housing black:Art. no. 1.260.301.XXXType F1 B 16.00F1 B 16.0012 V 24 V 115 V 230 V (6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.231.502.012 1.231.502.013DC (25 Imp/s) 1.231.502.0321.231.502.033AC (18 Imp/s) 1.231.502.0611.231.502.064 1.231.502.066Standard colour: beige Colour of housing black:Art. no. 1.231.501.XXXType F1 B 18.00F1 B 18.0012 V24 V115 V230 V(8-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.261.502.012 1.261.502.013DC (25 Imp/s) 1.261.502.032 1.261.502.033AC (18 Imp/s) 1.261.502.061 1.261.502.064 1.261.502.066Standard colour: beigeColour of housing black:Art. no. 1.261.501.XXXType B 16.01B 16.0112 V24 V115 V230 V(6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.012.012 1.230.012.013*DC (25 Imp/s) 1.230.012.032 1.230.012.033*AC (18 Imp/s) 1.230.012.061 1.230.012.064 1.230.012.066*Standard colour: beigeColour of housing black:Art. no. 1.230.011.XXX*standard stock modelAdditional stock models:1.230.011.01324 V DC/0 bw1.230.011.03324 V DC/1 bw1.230.011.066230 V AC/a bwPulseCounters1116/2009Type B 15.11B 15.1112 V24 V115 V230 V(5-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.200.110.012 1.200.110.013DC (25 Imp/s) 1.200.110.032 1.200.110.033AC (18 Imp/s) 1.200.110.061 1.200.110.064 1.200.110.066Type B 16.11B 16.1112 V24 V115 V230 V(6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.110.012 1.230.110.013*DC (25 Imp/s) 1.230.110.032 1.230.110.033*AC (18 Imp/s) 1.230.110.061* 1.230.110.064* 1.230.110.066*Standard colour: greyColour of housing black:Art. no. 1.230.111.XXX*standard stock modelAdditional stock models:1.230.011.03324 V DC/1 swStandard colour: grey6/2009Type B 16.21B 16.2112 V24 V115 V230 V(6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.210.012* 1.230.210.013*DC (25 Imp/s) 1.230.210.032 1.230.210.033*AC (18 Imp/s) 1.230.210.061 1.230.210.064 1.230.210.066*Standard colour: greyColour of housing black:Art. no. 1.230.211.XXXFurther stock models:1.230.211.01324 V DC/0 sw1.230.211.03324 V DC/1 sw1.230.211.066230 V AC/a sw1.230.217.01324 V DC/0 sw vs1.237.211.066230 V AC/a sw1.237.201.066230 V AC/a sw flat pinType B 15.21B 15.2112 V24 V115 V230 V(5-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.200.210.012 1.200.210.013*DC (25 Imp/s) 1.200.210.032 1.200.210.033AC (18 Imp/s) 1.200.210.061 1.200.210.064 1.200.210.066*standard stock modelStandard colour: grey*standard stock modelPulseCounters1136/2009Type F1 B 16.01F1 B 16.0112 V 24 V 115 V 230 V (6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.231.512.012 1.231.512.013DC (25 Imp/s) 1.231.512.0321.231.512.033AC (18 Imp/s)1.231.512.0611.231.512.064 1.231.512.066Standard colour: beige Colour of housing black:Art. no. 1.231.511.XXXType B 16.31B 16.3112 V 24 V 115 V 230 V (6-digit)Art. no.Art. no.Art. no.Art. no.DC (10 Imp/s) 1.230.310.012 1.230.310.013*DC (25 Imp/s) 1.230.310.0321.230.310.033AC (18 Imp/s)1.230.310.0611.230.310.064 1.230.310.066Standard colour: grey Colour of housing black:Art. no. 1.230.311.XXXFurther stock models:1.237.310.066 230 V AC/a flat pinB 15.21 vs Dvs B 16.31Dv B 16.31K1B 15.31945.2*standard stock model1141/2009。
Glider Flying Handbook说明书
Glider Flying Handbook2013U.S. Department of TransportationFEDERAL AVIATION ADMINISTRATIONFlight Standards Servicei iPrefaceThe Glider Flying Handbook is designed as a technical manual for applicants who are preparing for glider category rating and for currently certificated glider pilots who wish to improve their knowledge. Certificated flight instructors will find this handbook a valuable training aid, since detailed coverage of aeronautical decision-making, components and systems, aerodynamics, flight instruments, performance limitations, ground operations, flight maneuvers, traffic patterns, emergencies, soaring weather, soaring techniques, and cross-country flight is included. Topics such as radio navigation and communication, use of flight information publications, and regulations are available in other Federal Aviation Administration (FAA) publications.The discussion and explanations reflect the most commonly used practices and principles. Occasionally, the word “must” or similar language is used where the desired action is deemed critical. The use of such language is not intended to add to, interpret, or relieve a duty imposed by Title 14 of the Code of Federal Regulations (14 CFR). Persons working towards a glider rating are advised to review the references from the applicable practical test standards (FAA-G-8082-4, Sport Pilot and Flight Instructor with a Sport Pilot Rating Knowledge Test Guide, FAA-G-8082-5, Commercial Pilot Knowledge Test Guide, and FAA-G-8082-17, Recreational Pilot and Private Pilot Knowledge Test Guide). Resources for study include FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, FAA-H-8083-2, Risk Management Handbook, and Advisory Circular (AC) 00-6, Aviation Weather For Pilots and Flight Operations Personnel, AC 00-45, Aviation Weather Services, as these documents contain basic material not duplicated herein. All beginning applicants should refer to FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, for study and basic library reference.It is essential for persons using this handbook to become familiar with and apply the pertinent parts of 14 CFR and the Aeronautical Information Manual (AIM). The AIM is available online at . The current Flight Standards Service airman training and testing material and learning statements for all airman certificates and ratings can be obtained from .This handbook supersedes FAA-H-8083-13, Glider Flying Handbook, dated 2003. Always select the latest edition of any publication and check the website for errata pages and listing of changes to FAA educational publications developed by the FAA’s Airman Testing Standards Branch, AFS-630.This handbook is available for download, in PDF format, from .This handbook is published by the United States Department of Transportation, Federal Aviation Administration, Airman Testing Standards Branch, AFS-630, P.O. Box 25082, Oklahoma City, OK 73125.Comments regarding this publication should be sent, in email form, to the following address:********************************************John M. AllenDirector, Flight Standards Serviceiiii vAcknowledgmentsThe Glider Flying Handbook was produced by the Federal Aviation Administration (FAA) with the assistance of Safety Research Corporation of America (SRCA). The FAA wishes to acknowledge the following contributors: Sue Telford of Telford Fishing & Hunting Services for images used in Chapter 1JerryZieba () for images used in Chapter 2Tim Mara () for images used in Chapters 2 and 12Uli Kremer of Alexander Schleicher GmbH & Co for images used in Chapter 2Richard Lancaster () for images and content used in Chapter 3Dave Nadler of Nadler & Associates for images used in Chapter 6Dave McConeghey for images used in Chapter 6John Brandon (www.raa.asn.au) for images and content used in Chapter 7Patrick Panzera () for images used in Chapter 8Jeff Haby (www.theweatherprediction) for images used in Chapter 8National Soaring Museum () for content used in Chapter 9Bill Elliot () for images used in Chapter 12.Tiffany Fidler for images used in Chapter 12.Additional appreciation is extended to the Soaring Society of America, Inc. (), the Soaring Safety Foundation, and Mr. Brad Temeyer and Mr. Bill Martin from the National Oceanic and Atmospheric Administration (NOAA) for their technical support and input.vv iPreface (iii)Acknowledgments (v)Table of Contents (vii)Chapter 1Gliders and Sailplanes ........................................1-1 Introduction....................................................................1-1 Gliders—The Early Years ..............................................1-2 Glider or Sailplane? .......................................................1-3 Glider Pilot Schools ......................................................1-4 14 CFR Part 141 Pilot Schools ...................................1-5 14 CFR Part 61 Instruction ........................................1-5 Glider Certificate Eligibility Requirements ...................1-5 Common Glider Concepts ..............................................1-6 Terminology...............................................................1-6 Converting Metric Distance to Feet ...........................1-6 Chapter 2Components and Systems .................................2-1 Introduction....................................................................2-1 Glider Design .................................................................2-2 The Fuselage ..................................................................2-4 Wings and Components .............................................2-4 Lift/Drag Devices ...........................................................2-5 Empennage .....................................................................2-6 Towhook Devices .......................................................2-7 Powerplant .....................................................................2-7 Self-Launching Gliders .............................................2-7 Sustainer Engines .......................................................2-8 Landing Gear .................................................................2-8 Wheel Brakes .............................................................2-8 Chapter 3Aerodynamics of Flight .......................................3-1 Introduction....................................................................3-1 Forces of Flight..............................................................3-2 Newton’s Third Law of Motion .................................3-2 Lift ..............................................................................3-2The Effects of Drag on a Glider .....................................3-3 Parasite Drag ..............................................................3-3 Form Drag ...............................................................3-3 Skin Friction Drag ..................................................3-3 Interference Drag ....................................................3-5 Total Drag...................................................................3-6 Wing Planform ...........................................................3-6 Elliptical Wing ........................................................3-6 Rectangular Wing ...................................................3-7 Tapered Wing .........................................................3-7 Swept-Forward Wing ..............................................3-7 Washout ..................................................................3-7 Glide Ratio .................................................................3-8 Aspect Ratio ............................................................3-9 Weight ........................................................................3-9 Thrust .........................................................................3-9 Three Axes of Rotation ..................................................3-9 Stability ........................................................................3-10 Flutter .......................................................................3-11 Lateral Stability ........................................................3-12 Turning Flight ..............................................................3-13 Load Factors .................................................................3-13 Radius of Turn ..........................................................3-14 Turn Coordination ....................................................3-15 Slips ..........................................................................3-15 Forward Slip .........................................................3-16 Sideslip .................................................................3-17 Spins .........................................................................3-17 Ground Effect ...............................................................3-19 Chapter 4Flight Instruments ...............................................4-1 Introduction....................................................................4-1 Pitot-Static Instruments ..................................................4-2 Impact and Static Pressure Lines................................4-2 Airspeed Indicator ......................................................4-2 The Effects of Altitude on the AirspeedIndicator..................................................................4-3 Types of Airspeed ...................................................4-3Table of ContentsviiAirspeed Indicator Markings ......................................4-5 Other Airspeed Limitations ........................................4-6 Altimeter .....................................................................4-6 Principles of Operation ...........................................4-6 Effect of Nonstandard Pressure andTemperature............................................................4-7 Setting the Altimeter (Kollsman Window) .............4-9 Types of Altitude ......................................................4-10 Variometer................................................................4-11 Total Energy System .............................................4-14 Netto .....................................................................4-14 Electronic Flight Computers ....................................4-15 Magnetic Compass .......................................................4-16 Yaw String ................................................................4-16 Inclinometer..............................................................4-16 Gyroscopic Instruments ...............................................4-17 G-Meter ........................................................................4-17 FLARM Collision Avoidance System .........................4-18 Chapter 5Glider Performance .............................................5-1 Introduction....................................................................5-1 Factors Affecting Performance ......................................5-2 High and Low Density Altitude Conditions ...........5-2 Atmospheric Pressure .............................................5-2 Altitude ...................................................................5-3 Temperature............................................................5-3 Wind ...........................................................................5-3 Weight ........................................................................5-5 Rate of Climb .................................................................5-7 Flight Manuals and Placards ..........................................5-8 Placards ......................................................................5-8 Performance Information ...........................................5-8 Glider Polars ...............................................................5-8 Weight and Balance Information .............................5-10 Limitations ...............................................................5-10 Weight and Balance .....................................................5-12 Center of Gravity ......................................................5-12 Problems Associated With CG Forward ofForward Limit .......................................................5-12 Problems Associated With CG Aft of Aft Limit ..5-13 Sample Weight and Balance Problems ....................5-13 Ballast ..........................................................................5-14 Chapter 6Preflight and Ground Operations .......................6-1 Introduction....................................................................6-1 Assembly and Storage Techniques ................................6-2 Trailering....................................................................6-3 Tiedown and Securing ................................................6-4Water Ballast ..............................................................6-4 Ground Handling........................................................6-4 Launch Equipment Inspection ....................................6-5 Glider Preflight Inspection .........................................6-6 Prelaunch Checklist ....................................................6-7 Glider Care .....................................................................6-7 Preventive Maintenance .............................................6-8 Chapter 7Launch and Recovery Procedures and Flight Maneuvers ............................................................7-1 Introduction....................................................................7-1 Aerotow Takeoff Procedures .........................................7-2 Signals ........................................................................7-2 Prelaunch Signals ....................................................7-2 Inflight Signals ........................................................7-3 Takeoff Procedures and Techniques ..........................7-3 Normal Assisted Takeoff............................................7-4 Unassisted Takeoff.....................................................7-5 Crosswind Takeoff .....................................................7-5 Assisted ...................................................................7-5 Unassisted...............................................................7-6 Aerotow Climb-Out ....................................................7-6 Aerotow Release.........................................................7-8 Slack Line ...................................................................7-9 Boxing the Wake ......................................................7-10 Ground Launch Takeoff Procedures ............................7-11 CG Hooks .................................................................7-11 Signals ......................................................................7-11 Prelaunch Signals (Winch/Automobile) ...............7-11 Inflight Signals ......................................................7-12 Tow Speeds ..............................................................7-12 Automobile Launch ..................................................7-14 Crosswind Takeoff and Climb .................................7-14 Normal Into-the-Wind Launch .................................7-15 Climb-Out and Release Procedures ..........................7-16 Self-Launch Takeoff Procedures ..............................7-17 Preparation and Engine Start ....................................7-17 Taxiing .....................................................................7-18 Pretakeoff Check ......................................................7-18 Normal Takeoff ........................................................7-19 Crosswind Takeoff ...................................................7-19 Climb-Out and Shutdown Procedures ......................7-19 Landing .....................................................................7-21 Gliderport/Airport Traffic Patterns and Operations .....7-22 Normal Approach and Landing ................................7-22 Crosswind Landing ..................................................7-25 Slips ..........................................................................7-25 Downwind Landing ..................................................7-27 After Landing and Securing .....................................7-27viiiPerformance Maneuvers ..............................................7-27 Straight Glides ..........................................................7-27 Turns.........................................................................7-28 Roll-In ...................................................................7-29 Roll-Out ................................................................7-30 Steep Turns ...........................................................7-31 Maneuvering at Minimum Controllable Airspeed ...7-31 Stall Recognition and Recovery ...............................7-32 Secondary Stalls ....................................................7-34 Accelerated Stalls .................................................7-34 Crossed-Control Stalls ..........................................7-35 Operating Airspeeds .....................................................7-36 Minimum Sink Airspeed ..........................................7-36 Best Glide Airspeed..................................................7-37 Speed to Fly ..............................................................7-37 Chapter 8Abnormal and Emergency Procedures .............8-1 Introduction....................................................................8-1 Porpoising ......................................................................8-2 Pilot-Induced Oscillations (PIOs) ..............................8-2 PIOs During Launch ...................................................8-2 Factors Influencing PIOs ........................................8-2 Improper Elevator Trim Setting ..............................8-3 Improper Wing Flaps Setting ..................................8-3 Pilot-Induced Roll Oscillations During Launch .........8-3 Pilot-Induced Yaw Oscillations During Launch ........8-4 Gust-Induced Oscillations ..............................................8-5 Vertical Gusts During High-Speed Cruise .................8-5 Pilot-Induced Pitch Oscillations During Landing ......8-6 Glider-Induced Oscillations ...........................................8-6 Pitch Influence of the Glider Towhook Position ........8-6 Self-Launching Glider Oscillations During Powered Flight ...........................................................8-7 Nosewheel Glider Oscillations During Launchesand Landings ..............................................................8-7 Tailwheel/Tailskid Equipped Glider Oscillations During Launches and Landings ..................................8-8 Aerotow Abnormal and Emergency Procedures ............8-8 Abnormal Procedures .................................................8-8 Towing Failures........................................................8-10 Tow Failure With Runway To Land and Stop ......8-11 Tow Failure Without Runway To Land BelowReturning Altitude ................................................8-11 Tow Failure Above Return to Runway Altitude ...8-11 Tow Failure Above 800' AGL ..............................8-12 Tow Failure Above Traffic Pattern Altitude .........8-13 Slack Line .................................................................8-13 Ground Launch Abnormal and Emergency Procedures ....................................................................8-14 Abnormal Procedures ...............................................8-14 Emergency Procedures .............................................8-14 Self-Launch Takeoff Emergency Procedures ..............8-15 Emergency Procedures .............................................8-15 Spiral Dives ..................................................................8-15 Spins .............................................................................8-15 Entry Phase ...............................................................8-17 Incipient Phase .........................................................8-17 Developed Phase ......................................................8-17 Recovery Phase ........................................................8-17 Off-Field Landing Procedures .....................................8-18 Afterlanding Off Field .............................................8-20 Off-Field Landing Without Injury ........................8-20 Off-Field Landing With Injury .............................8-20 System and Equipment Malfunctions ..........................8-20 Flight Instrument Malfunctions ................................8-20 Airspeed Indicator Malfunctions ..........................8-21 Altimeter Malfunctions .........................................8-21 Variometer Malfunctions ......................................8-21 Compass Malfunctions .........................................8-21 Glider Canopy Malfunctions ....................................8-21 Broken Glider Canopy ..........................................8-22 Frosted Glider Canopy ..........................................8-22 Water Ballast Malfunctions ......................................8-22 Retractable Landing Gear Malfunctions ..................8-22 Primary Flight Control Systems ...............................8-22 Elevator Malfunctions ..........................................8-22 Aileron Malfunctions ............................................8-23 Rudder Malfunctions ............................................8-24 Secondary Flight Controls Systems .........................8-24 Elevator Trim Malfunctions .................................8-24 Spoiler/Dive Brake Malfunctions .........................8-24 Miscellaneous Flight System Malfunctions .................8-25 Towhook Malfunctions ............................................8-25 Oxygen System Malfunctions ..................................8-25 Drogue Chute Malfunctions .....................................8-25 Self-Launching Gliders ................................................8-26 Self-Launching/Sustainer Glider Engine Failure During Takeoff or Climb ..........................................8-26 Inability to Restart a Self-Launching/SustainerGlider Engine While Airborne .................................8-27 Self-Launching Glider Propeller Malfunctions ........8-27 Self-Launching Glider Electrical System Malfunctions .............................................................8-27 In-flight Fire .............................................................8-28 Emergency Equipment and Survival Gear ...................8-28 Survival Gear Checklists ..........................................8-28 Food and Water ........................................................8-28ixClothing ....................................................................8-28 Communication ........................................................8-29 Navigation Equipment ..............................................8-29 Medical Equipment ..................................................8-29 Stowage ....................................................................8-30 Parachute ..................................................................8-30 Oxygen System Malfunctions ..................................8-30 Accident Prevention .....................................................8-30 Chapter 9Soaring Weather ..................................................9-1 Introduction....................................................................9-1 The Atmosphere .............................................................9-2 Composition ...............................................................9-2 Properties ....................................................................9-2 Temperature............................................................9-2 Density ....................................................................9-2 Pressure ...................................................................9-2 Standard Atmosphere .................................................9-3 Layers of the Atmosphere ..........................................9-4 Scale of Weather Events ................................................9-4 Thermal Soaring Weather ..............................................9-6 Thermal Shape and Structure .....................................9-6 Atmospheric Stability .................................................9-7 Air Masses Conducive to Thermal Soaring ...................9-9 Cloud Streets ..............................................................9-9 Thermal Waves...........................................................9-9 Thunderstorms..........................................................9-10 Lifted Index ..........................................................9-12 K-Index .................................................................9-12 Weather for Slope Soaring .......................................9-14 Mechanism for Wave Formation ..............................9-16 Lift Due to Convergence ..........................................9-19 Obtaining Weather Information ...................................9-21 Preflight Weather Briefing........................................9-21 Weather-ReIated Information ..................................9-21 Interpreting Weather Charts, Reports, andForecasts ......................................................................9-23 Graphic Weather Charts ...........................................9-23 Winds and Temperatures Aloft Forecast ..............9-23 Composite Moisture Stability Chart .....................9-24 Chapter 10Soaring Techniques ..........................................10-1 Introduction..................................................................10-1 Thermal Soaring ...........................................................10-2 Locating Thermals ....................................................10-2 Cumulus Clouds ...................................................10-2 Other Indicators of Thermals ................................10-3 Wind .....................................................................10-4 The Big Picture .....................................................10-5Entering a Thermal ..............................................10-5 Inside a Thermal.......................................................10-6 Bank Angle ...........................................................10-6 Speed .....................................................................10-6 Centering ...............................................................10-7 Collision Avoidance ................................................10-9 Exiting a Thermal .....................................................10-9 Atypical Thermals ..................................................10-10 Ridge/Slope Soaring ..................................................10-10 Traps ......................................................................10-10 Procedures for Safe Flying .....................................10-12 Bowls and Spurs .....................................................10-13 Slope Lift ................................................................10-13 Obstructions ...........................................................10-14 Tips and Techniques ...............................................10-15 Wave Soaring .............................................................10-16 Preflight Preparation ...............................................10-17 Getting Into the Wave ............................................10-18 Flying in the Wave .................................................10-20 Soaring Convergence Zones ...................................10-23 Combined Sources of Updrafts ..............................10-24 Chapter 11Cross-Country Soaring .....................................11-1 Introduction..................................................................11-1 Flight Preparation and Planning ...................................11-2 Personal and Special Equipment ..................................11-3 Navigation ....................................................................11-5 Using the Plotter .......................................................11-5 A Sample Cross-Country Flight ...............................11-5 Navigation Using GPS .............................................11-8 Cross-Country Techniques ...........................................11-9 Soaring Faster and Farther .........................................11-11 Height Bands ..........................................................11-11 Tips and Techniques ...............................................11-12 Special Situations .......................................................11-14 Course Deviations ..................................................11-14 Lost Procedures ......................................................11-14 Cross-Country Flight in a Self-Launching Glider .....11-15 High-Performance Glider Operations and Considerations ............................................................11-16 Glider Complexity ..................................................11-16 Water Ballast ..........................................................11-17 Cross-Country Flight Using Other Lift Sources ........11-17 Chapter 12Towing ................................................................12-1 Introduction..................................................................12-1 Equipment Inspections and Operational Checks .........12-2 Tow Hook ................................................................12-2 Schweizer Tow Hook ...........................................12-2x。
小型压力调节器说明书

L-13SMINIATURE PRESSURE REGULATORSEASy TO AdjUSTU Designed for Applications with Limited Space and for Low-Flow or Dead-End ServiceU Small Package Size and Lightweight Construction U Corrosion-Resistant Anodized Aluminum ExteriorU Excellent Stability and Repeatability U Self Relieving U Low CostThe AR91 and AR92 Seriesminiature pressure regulators are compact, low-cost units that operate in pressure ranges up to 100 psi, with a maximum supply pressure of 250 psi.They provide dependable reliability and accuracy for low-flow and dead-end applications, but are not designed for critical flow applications. Each unit has a corrosion-resistant anodized aluminum body with a standard fluorocarbon diaphragm.SPECIFICATIONSEffect of Supply Pressure Variation (25 psig) on Outlet Pressure: <0.25 psig (17.02 mbar)Exhaust Capacity (5 psig Above 20 psig Setpoint): 0.1 to 0.3 SCFM (2.8 to 8.5 LPM) typicalMaximum Supply Pressure: 250 psig (17.2 bar)Flow Capacity at 100 psig (6.9 bar) Supply and 20 psig (1.4 bar) Outlet: 2.5 SCFM (71 LPM)Total Air Consumption @ Maximum Output: 3 SCFH (84.6 LPM)Port Size: 1⁄16-27 NPT or 5 mm metric threadMaterials of Construction: Body: Anodized aluminum Adjusting Screw: Plated steel Trim: Brass, acetal D iaphragm: Fluorocarbon with polyester fabric Knob: Acetal resin Spring: Music wireDimensions: 22.2 x 22.2 x 84.6 mm (0.875 x 0.875 x 3.33")Weight: 2.2 oz (0.06 kg)Mounting Options: Pipe or panelAR91-015, shown larger than actual size.Comes complete with operator’s manual.Ordering Example: AR91-015, miniature pressure regulator, 0 to 15 psig 1⁄16-27 NPT pressure connections.Corrosion-resistantanodized aluminum bodyAR90 Series。
KMB+K Precision程序可编程直流电源说明书

B+K Precision ®models 9120A,9121A,9122A,9123A and 9124are laboratory grade Programmable DC Power Supplies providing great performance and features not found in other supplies in this price category.The 9120series are designed to meet the needs of today’s applications in R&D design verification,production testing or university labs that require clean and reliable power,high resolution and accuracy and fast transient response time.IExcellent display resolution I Low ripple and low noiseI Outstanding temperature stabilityI Fast transient response time (<150µs)I SCPI compatibleI Front and Rear Output T erminals I Closed case calibrationI Compact size for bench use or rack mountable (2U x 1/2U size)I List mode operation for increased throughput.Download and execute command sequences from non-volatile memory91244mm sheathed safety banana jacksOutput ON/OFF switchEncoder knob for quick analog style controlNumeric keys for direct entry of voltage and current valuesHigh resolution displayFront Panel OperationThe numeric keys and rotary knob provide a convenient interface for setting output levels quickly and precisely.Voltage and Current can be set to a maximum resolution of 0.5mV (2mV for 9124)and 0.1mA respectively.Up to 50parameters can be stored and recalled from internal memory.Data sheetTechnical data subject to change ©B&K Precision Corp.2008v031609Single Output Programmable DC Power SuppliesModels 9120A, 9121A, 9122A, 9123A & 9124DVM and m ΩmeterUser accessible fuseT emperature controlled cooling fan Serial interface connector for RS232 or USB communication.(USB communication cable is optional).Model 9123A also supports control via GPIB interface.Remote Sense and digital port functionalityThe 9120 series uses 4mm sheathed banana jacks that accept sheathed or shrouded banana plugs and meet the latest international safety standards.Extra FeaturesThe 9120 series’ digital port offers a variety of configurations. The port can operate in Digital I/O,external Trigger and DFI/RI (Discrete FaultIndicator/Remote Inhibit) mode. The RI feature can be used for turning several power supplies On/Off simultaneously. External triggering can be used in combination with List mode.The included Application Software supports front panel emulation and allows users to generate simple test sequences without the need to write source code.Additionally, the power supply comes with a built-in 51/2 digit DVM and high resolution milliohm meter supporting 4 wire measurements.Remote InterfaceThe power supplies can be remotely controlled from any PC with USB or RS232 interface, allowing the user to program and monitor all parameters through easy to use SCPI commands.The power supplies come with a RS232 to TTL serial converter cable. A USB to serial converter cable is available as option. Additionally, model 9123A can be controlled via GPIB interface and includes a GPIB to TTL conversion adapter cable.2Single Output Programmable DC Power Supplies Models 9120A, 9121A, 9122A, 9123A & 9124。
WS500沃尔夫控制器数据手册说明书

data sheetUnipak replacementmanual stationsmultiweldersseam weldersReliability from simplicityThe WS500 is a compact, robust unit providing basic control for resistancewelding. The membrane front panel has a water-resistant finish andincorporates four push buttons and an LCD for simple programming andmonitoring. Connections are via a plug-in connector block and four studs areprovided for mounting. Alternatively, the WS500 can be supplied in a widerange of housings incorporating circuit breaker and thyristor units.features benefitssingle/repeat/half-cycle/roll-spot/seam modesversatiledual heat weld + pulsation can be used for coated materialsintegral programmer always available50/60 Hz operation internationalup to 8 user-defined programs store settings for different material andthicknessesretract control suitable for most types of gun operationcounter with optional lock-out can be used for electrode maintenance24 V dc supply simple installationcross-interlock safety and load-sharingoptionsELR/1 earth-leakage relay •2-hand start unit8-position remote program select unit #90-80-06-023PA/2 3-phase adapterdual gun adapter (does not include retract function)configurationsW6, Monopak, Unipak housingsENTRON Controls, LLC. • 1402 S. Batesville Road • Greer • South Carolina • 29650 • USA☎ (864) 416-0190 (864) 416-0195 ************************welding parameters x 8configuration (continued)mode single/repeat retract none, simple, high-lift +/- heat1 0..99% frequency 50/60 Hzheat2 0..99% interlock on/offpresqueeze 0..99 cycles heat range high/lowsqueeze 0..99 cycles cross-interlock external/ringweld1 0..99 cyclescool1 0..99 cycles environmentalweld2 0..99 cycles temperaturecool2 0..99 cycles - operating 32° to 122Fpulses 1..9 - storage -13° to 158°Fhold 0..99 cycles humiditybalance 0..60% (seam mode only) - operating up to 80% (relative)off 0..99 cycles - storage 10% to 90%counter (configuration types 3,5,6,7 and 10 only) dimensionsactual count 0..9999 height 6.25”end count 0..9999 width 5”at end of count stop/continue depth 1.25” + .75” for connectorweight 1.5 lbsconfiguration programstype power requirements- 00 spot/repeat simple spot welding with no otherfunctions 8 voltage 24 V dc- 01 spot/repeat with cross-interlock spot welding with an output that can beused to prevent other machines fromwelding4 sync. frequency 50/60 Hzcurrent < 500 mA (all outputs off)- 02 spot/repeat with retract spot welding with an input and outputfor controlling the gun position4- 03 spot/repeat with counter spot welding with an output thatactivates when the count is reached4 i/o ratings- 04 spot/repeat with cross-interlock and retract a combination of types 01 and 02 2 inputs < 10 mA @ 24 V dcoutputs < 500 mA @ 24 V dc- 05 spot/repeat with counter and retract a combination of types 02 and 03 2 SCR drive 5 kHz; 1:10 mark/space; first pulse24 V; subsequent pulses > 15 V- 06 spot/repeat with counter and cross-interlock a combination of types 01 and 03 2- 07 spot/repeat with counter, cross-interlock and retract a combination of types 01, 02 and 03 1- 08 half cycle spot welding using only one half-cycleweld duration 8- 09 half cycle with cross interlock a combination of types 08 and 01 4- 10 half cycle with counter a combination of types 08 and 03 4- 11 roll-spot spot welding with an output to operatemotor-driven welding wheels during theOFF time between sequences 8- 12 seam uses seam wheels, a motor drive andcontinuous or modulated current toprovide a seam weld8Information in the document is subject to change without notice.91-10-00-00-23 rev. 3 © 2003 BF ENTRON Ltd.ENTRON Controls, LLC. • 1402 S. Batesville Road • Greer • South Carolina • 29650 • USA☎ (864) 416-0190 (864) 416-0195 ************************760021。
新简易MA遥控器PAC-YT52CRA新设计说明书
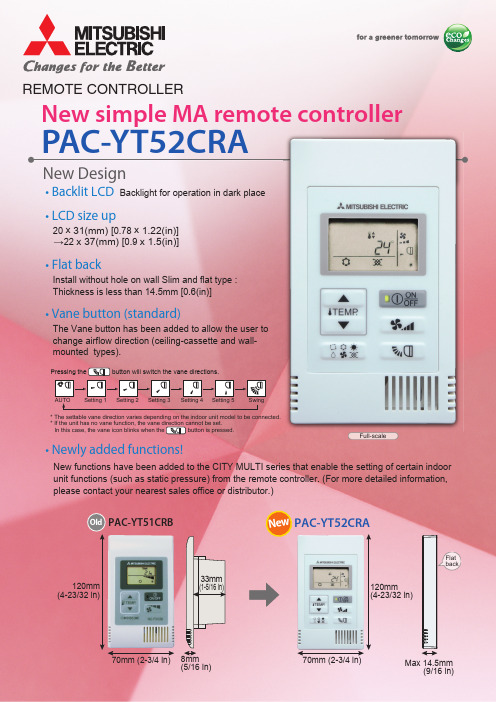
New simple MA remote controllerPAC-YT52CRANew Design• Backlit LCD Backlight for operation in dark place• LCD size up20 x 31(mm) [0.78 x 1.22(in)] →22 x 37(mm) [0.9 x 1.5(in)]• Flat backInstall without hole on wall Slim and flat type : Thickness is less than 14.5mm [0.6(in)]• Vane button (standard)The Vane button has been added to allow the user to change airflow direction (ceiling-cassette and wall- mounted types).• Newly added functions!New functions have been added to the CITY MULTI series that enable the setting of certain indoor unit functions (such as static pressure) from the remote controller. (For more detailed information, please contact your nearest sales office or distributor.)120mm (4-23/32 in)120mm (4-23/32 in)PAC-YT51CRBFull-scale33mm (1-5/16 in)8mm (5/16 in)Max 14.5mm (9/16 in)N e w OldFlat backPressing thebutton will switch the vane directions.* The settable vane direction varies depending on the indoor unit model to be connected.* If the unit has no vane function, the vane direction cannot be set.In this case, the vane icon blinks when theAUTO Setting 1Setting 2Setting 3Setting 4Setting 5SwingREMOTE CONTROLLERFunctionsExternal Dimensions14.5[9/16]83.5[3-9/32]120[4-23/32]70[2-3/4]Unit:mm[in.].F F O d n a N O n e e w t e b s e g n a h C F F O /N O Operation mode switching Vane settingBacklightError informationVentilation equipment controlFan speed settingItem DescriptionSetting DisplaySetting Display1. Operations/Display*1Room temp.Setting *1Select from COOL, DRYING, FAN, AUTO, and HEAT.Changes the fan speed.* The settable fan speed varies depending on the indoor unit model to be connected.Switches the vane directions.* The settable vane direction varies depending on the indoor unit model to be connected.Pressing the button lights up a backlight.The light automatically turns off after a certain period of time.(The brightness settings can be selected from Bright, Dark, and Light off.)Displays the current error status with the address.* The address may not be displayed depending on the error status.When the CITY MULTI indoor unit is connected, interlocked setting of the CITY MULTI LOSSNAY unit is possible.When the Mr. SLIM indoor unit (A-control) is connected, interlocked operation of the microcomputer-type LOSSNAY unit is possible. Sets a room temperature.* The preset temperature range varies depending on the indoor unit model to be connected.(The ranges for a standard model are as follows.) • COOL/DRY: 19ºC - 30ºC/67ºF - 87ºF • HEAT: 17ºC - 28ºC/63ºF - 83ºF • AUTO: 19ºC - 28ºC/67ºF - 83ºFAllows/disallows local operationTemperature range restrictionOperation lock By setting a centralized controller, the following local operations are prohibited: ON/OFF; operation mode; preset temperature;* The CENTRAL icon appears while the local operations are prohibited.Locks all buttons.Item Description2. Restriction settings*1 AUTO mode is settable only when those functions are available on the indoor unit.The preset temperature range can be restricted for each operation mode (COOL/HEAT/AUTO).Room temperature detectionVarious settingsThe temperature sensor is built-in on the remote controller.The following settings can be made by setting the dip switches.• Remote controller Main/Sub setting• Temperature display unit setting (Celsius/Fahrenheit)• Cooling/heating display in AUTO mode • Indoor temperature displayItem Description3. MiscellaneousSystem StructureR/C : Remote ControllerSimple MA R/CSimple MA R/CNon-polarized 2-wireNon-polarized 2-wire Connectable ModelsControllable unitsCITY MULTI indoor unit Mr. SLIM indoor unit (A-control)CITY MULTI LOSSNAY unit *1*1 Connected via indoor unit (direct connection not allowed)MEE12K010New publication effective Aug. 2012Specifications subject to change without noticeEco Changes is the Mitsubishi Electric Group’s environmental statement, and expresses the Group’s stance on environmental management. Through a wide range of businesses, we are helping contribute to the realization of a sustainable society.。
泰勒梅 M1 驱动器说明书

FADEDRAWThe 4° Loft Sleeve allows you to adjust the loft, lie and face angle of the M1 driver: • Each of the 12 sleeve movements increases or decreases loft 0.50 - 0.75° • Each of the 12 Sleeve movements increases or decreases lie angle 0.50 - 0.75° • Each of the 12 Sleeve movements increases or decreases face angle 1.0 - 2.0°The M1 460 and 440 Front Track consists of one 15-gram weight to provide a range of draw, neutral and fade ball flights:• Fade – Position the weight towards the toe• Neutral – Position the weight in the center of the track • Draw – Position the weight towards the heel TOUR FIT SYSTEMTUNING MANUALAdjusting the M1 driver is simple by way of a 3 step system created to allow golfers to optimize launch conditions. Follow these steps to ensure you are achieving high launch and low spin to complement your ideal shot shape. The adjustable back weight in the M1 adds the ability to adjust spin, launch and playability to ensure all golfers can maximize their distance.ADJUSTING THE M1Adjusting the M1 family is simple with the TaylorMade torque wrench. Use the wrench to loosen the screw in the center of each weight, then slide the weight to the desired location and lock it in place by tightening the screw until you hear an audible “click” noise from the wrench.In order to adjust the Loft Sleeve, loosen the screw in the heel until the clubhead releases from the shaft. Align the desired loft as marked on the sleeve with the line on the back of the hosel and tighten the screw until you hear an audible “click” noise.1. LOFT, LIE & FACE ANGLE - LOFT SLEEVE2. BALL FLIGHT - FRONT TRACK WEIGHT SYSTEMThe Sliding Weight System consists of one 25-gram weight to provide a range of draw, neutral and fade ball flights:• Fade – Position the weight towards the toe• Neutral – Position the weight in the center of the track • Draw – Position the weight towards the heel BALL FLIGHT - SLIDING WEIGHT SYSTEMThe Back Track system of M1 460 has one 12-gram weight (M1 440 has one 15-gram weight), which adjusts for a range of high, medium and low spin & trajectory:• High Spin / Higher Trajectory / Maximum Forgiveness –Move back weight towards the back “HIGH” setting • Medium Spin / Mid Trajectory – Move back weightto the center setting to provide medium spin & trajectory • Low Spin / Low Trajectory – Move back weighttowards the front “LOW” setting to decrease spin & trajectory The 4° Loft Sleeve allows you to adjust the loft, lie and face angle of the M1 fairway:• Each of the 12 sleeve movements increases or decreases loft 0.50 - 0.75°• Each of the 12 Sleeve movements increases or decreases lie angle 0.50 - 0.75°• Each of the 12 Sleeve movements increases or decreases face angle 1.0 - 2.0°M1 FAIRWAYThe M1 fairway utilizes the same Loft Sleeve and Sliding Weight System technologies found in the M1 driver to create a precise fit for ideal launch characteristics.LOFT, LIE & FACE ANGLE - LOFT SLEEVE3. SPIN & TRAJECTORY CONTROL - BACK TRACK WEIGHT SYSTEMLOW SPIN & TRAJECTORYHIGH SPIN & TRAJECTORYMEDIUM SPIN & TRAJECTORYWarning: Failure to adjust the club as instructed may result in injury or damage to property.8.57.757.06.57.07.758.59.2510.010.510.09.259.58.758.07.58.08.759.510.2511.011.511.010.2510.59.759.08.59.09.7510.511.2512.012.512.011.2512.011.2510.510.010.511.2512.012.7513.514.013.512.7556.056.557.2558.058.559.2560.059.2558.558.057.2556.5±0-300-500-600-500-300±0+300+500+600+500+300Square 2° Open 3° Open 4° Open 3° Open 2° Open Square 2° Closed 3° Closed 4° Closed 3° Closed 2° Closed8.5SETTING9.510.512.0LIE ANGLE SPIN FACE ANGLE The Front Track consists of one 27-gram weight to provide a range of draw, neutral and fade ball flights:• Fade – Position the weight towards the toe• Neutral – Position the weight in the center of the track • Draw – Position the weight towards the heel BALL FLIGHT - SLIDING WEIGHT SYSTEMThe 3° Loft Sleeve allows you to adjust the loft, lie and face angle of the M1 rescue:• Each of the 12 sleeve movements increases or decreases loft by 0.50°• Each of the 12 Sleeve movements increases or decreases lie angle by 0.50°• Each of the 12 Sleeve movements increases or decreases face angle 1.0°M1 RESCUEThe M1 Rescue utilizes the same Loft Sleeve and Sliding Weight System technologies found in the M1 driver and fairway to create a precise fit for ideal launch characteristics.LOFT, LIE & FACE ANGLE - LOFT SLEEVE© 2016 Taylor Made Golf Company, Inc.M1 DRIVERLOFT HIGHER+2°LOFTHIGHER1.5°LOFT HIGHER+2°FADENEUTRALDRAWFADENEUTRALDRAWNEUTRALSETTING SPIN (RPM)LAUNCH HIGH +1ºMEDIUM ±0ºLOW-1º+150±0-150。
一种运动适应性快速运动估计算法

一种运动适应性快速运动估计算法
李蕊;姜昱明
【期刊名称】《计算机应用》
【年(卷),期】2003(023)004
【摘要】文中给出了一种适应性运动跟踪块匹配算法,利用相邻块的相关性确定搜索的初始点,根据相邻块的运动性质确定当前块采用的搜索算法.实验表明此算法计算复杂度低,预测精度高.
【总页数】3页(P40-42)
【作者】李蕊;姜昱明
【作者单位】西安电子科技大学,计算机学院,陕西,西安,710071;西安电子科技大学,计算机学院,陕西,西安,710071
【正文语种】中文
【中图分类】TP301.6
【相关文献】
1.一种基于子搜索格雷码核的快速视频块运动估计算法∗ [J], 王冠;罗珅;葛迦
2.一种采用多模式切换的快速运动估计算法 [J], 李贺军;李和平;李建雄
3.一种基于局部极值搜索的快速运动估计算法 [J], 夏校朋;刘恩海;蒲松柏
4.一种利用预测运动矢量改进的H.264快速运动估计算法 [J], 郭继昌;邱琳耀;张雪
5.一种H .264/AVC快速分数运动估计算法 [J], 马世银;蒋林
因版权原因,仅展示原文概要,查看原文内容请购买。
Rane Model DC 24 动态控制器说明书

DC 24DYNAMIC CONTROLLERData Sheet-1General DescriptionThe Rane Model DC 24 Dynamic Controller is a two chan-nel Compressor, Limiter, Expander Gate system with very un-usual attributes. The DC 24 offers unprecedented control of its operating parameters as well as a built-in 24 dB/octave Linkwitz-Riley Crossover which gives it very impressive capabilities.Total freedom from control interaction highlight the DC 24 as well as the availability of separate Compressor and Limiter controls. The Compressor offers control over both Ratio and Threshold, while the Limiter allows setting a separate Threshold. In doing this, the DC 24 allows the operator to create a smooth transition between subtle compression over a wide dynamic range and peak-stop limiting at the sound system’s highest allow-able level. If that’s not enough, the DC 24 also offers indepen-dent Expander/Gate Ratio and Threshold controls. This third level of signal manipulation makes the DC 24 a most useful and revolutionary device.Attack and release times are automatic and program depen-dent. This simplifies use of the DC 24, as these subtle controls can confuse most users. History has proven that experienced compressor users rarely miss these controls after using a DC 24.The internal Crossover allows the DC 24 to operate as a two-way speaker dividing network along with all of the dy-namic characteristics of a fully featured Compressor Limiter. In addition to this application, the DC 24 supplies the necessary circuitry to allow the unit to divide a single channel of audio information in two separate frequency ranges and to then re-combine the program material into one Channel. Using the DC 24 in this way eliminates the pumping and breathing associated with compression and limiting when only one Channel is used to cover the entire audio spectrum.Refer to “The DC 24 User’s Guide,” on the Rane website, for an easy-to-understand guide of operation and applications.Features• Ratio & Threshold Controls for Compressor and Gate/Expander • Limiter Threshold Controls• Program Dependent Attack & Release• Linkwitz-Riley Crossover with 24 dB per Octave Slopes • Low-High Crossover Mode (1 In/2 Out)• Bandsplit Combine Mode (1 In/1 Out)• Stereo/Dual Modes (2 In/2 Out)• Side Chain Insert Jacks• Balanced XLR & ¼" TRS Connectors • -10 dBV / +4 dBu Gain Switch• UL/CSA Remote Power Supply (120 VAC)• CE (Low Voltage & EMC) Remote Power Supply (230 VAC)DATA SHEETDC 24DYNAMIC CONTROLLERData Sheet-2Parameter Specification Limit Units Conditions/CommentsCompressor..........Threshold Range -50 to +205dB ..........Ratio Range 1:1 to 10:110%Expander / Gate..........Threshold Range -50 to +105dB ..........Ratio Range 1:1 to 20:110%Limiter..........Threshold Range -20 to +202dBCrossover ..........Type Linkwitz-Riley 4th-order 24 dB per octave slopes..........Range 70 Hz to 7 kHz5%41-detent continuously variable pot Inputs: Type Active Balanced / Unbalanced ..........Connectors XLR & + ¼" TRS ..........Impedance20k 1%Ω..........Maximum Level +201dBuOutputs: Type Active Balanced ..........Connectors XLR & + ¼" TRS ..........Impedance1001%ΩEach output ..........Maximum Level +261dBu 2 kΩ or greater +201dBu 600 Ω or greaterOverall Gain Range -12 to +12±1dB Center detent unity gainRFI FiltersYes Passive Bypass SwitchYes LED Thresholds: Overload +221dBu Output or any internal level ..........Signal Present -403dBu Input LevelFrequency Response 20 Hz to 20 kHz +0/-.5dB THD+Noise0.05.01%+4 dBu, 1 kHzIM Distortion (SMPTE)0.1.01%60 Hz / 7 kHz, 4:1, +4 dBuSignal-to-Noise Ratio 1082dB Unity Gain re +20 dBu, 20 kHz BW 922dBUnity Gain re +4 dBu, 20 kHz BW Unit: Agency Listing ..........120 VAC model Class 2 Equipment National Electrical Code UL & CSA Exempt Class 2 equipment ..........230 VAC model CE-EMC EMC directive 89/336/EECCE-SafetyExempt per art. 1, LVD 73/23/EEC Power Supply: Agency Listing Rane model RS 1Class 2 Equipment ..........120 VAC model UL File no. E88261CSA File no. LR58948..........230 VAC modelCE-EMC EMC directive 89/336/EEC CE-Safety LV directive 73/23/EEC ..........100 VAC model Built to JISJapan onlyPower Supply Requirement 18 VAC w/center tap 0.1Vrms Maximum Current 600mA RMS current from remote supply Unit: Construction All Steel..........Size 1.75"H x 19"W x 5.3"D (1U)(4.4 cm x 48.3 cm x 13.5 cm) ..........Weight 5 lb(2.3 kg)Shipping: Size 4.5" x 20.3" x 13.75"(11.5 cm x 52 cm x 35 cm)..........Weight 9 lb(4.1 kg)Note 1: 0 dBu=0.775 VrmsNote 2: Unless otherwise stated, all measurements made with Thresholds set at maximum, Ratios set at minimum.DC 24DYNAMIC CONTROLLERData Sheet-3Block DiagramArchitectural SpecificationsThe dynamic processor shall be a two (2) channel unit, each channel of which provides independent control over its gating, compression and limiting functions. The gating function shall provide a means for setting the gate threshold as well as the ratio of the function thus providing a means for gentler slopes to oc-cur such as one would expect to find in an expander.The compressor shall also provide a means for setting thresh-old and ratio independently. The limiter shall also provide a means for setting its operational threshold, but shall differ from the other two functions in that limit ratio shall be a function of limit level.All attack and release characteristics provided by the dynam-ic controller shall be a function of the current program material, thus providing a high level of transparency to the listener.The dynamic processor shall provide an active crossover circuit for the purpose of using the unit to drive amplifiers con-nected to two-way loudspeaker systems as well as for dividing a single channel audio source into two frequency bands for ulti-mate recombination at the outupts of the device. The crossover shall be a fourth-order Linkwitz-Riley type configuration.Passive bypass switches shall be provided to ensure total bypass of the unit’s active circuitry in the event of power failure. The inputs and outputs shall be active balanced/unbalanced designs terminated with XLR & ¼" TRS connectors. The side-chain send and receive connectors shall be ¼" unbalanced types, wired tip=send, ring=return.RFI filters shall be provided at the processor’s inputs. LEDs shall be provided to indicate the presence of an input signal as well as high level overload conditions.The unit shall be exempt from agency safety requirements and powered from a UL listed / CSA certified remote power sup-ply (120 VAC), or CE approved (230 VAC) via a rear panel input modular plug.The unit shall be entirely constructed from cold-rolled steel, and mount into a standard EIA relay rack occupying 1 rack space.The unit shall be a Rane Corporation Model DC 24.DC 24DYNAMIC CONTROLLERData Sheet-4All features & specifications subject to change without notice.DOC 107501Rear PanelAvailable Accessories • SC 1.7 Security Cover©Rane Corporation 10802 47th Ave. W., Mukilteo WA 98275-5098 TEL 425-355-6000 FAX 425-347-7757 WEB Application InformationTraditionally, a product such as the DC 24 has been referred to as a “Compressor / Limiter” because the range of the Ratio control on the Compressor has been wide enough to accommo-date both gentle compression and harder limiting effects. Not, however, simultaneously. One had to make a choice between the two modes of operation. On some models a Gate has been pro-vided which may or may not be part of the Compressor function.In the DC 24, all three functions of each channel are inde-pendent. Gating may occur when low-level signals are present, compression may occur when the level increases, and “peak-stop” limiting is available for high-level signals. This provides a three slope capability which is rather unique in the audio industry.Additionally, the DC 24 can help out a great deal on the low end of the amplitude spectrum by serving as a noise gate simul-taneously. The Compressor may be used to “tighten” vocals and instrumentals while leaving the Limiter function available for use as a safety valve.To accomplish this feat, the DC 24 provides three separate “Side Chains” in each Channel, each having its own set of front panel controls. For the Gate / Expander function, input signal is converted from an audio format to a control signal and ap-plied to the threshold circuit. If the output of the controller is below the specified threshold, it is passed along to the Gate / Expander Ratio control. The Ratio control allows attenuation of the controller to inhibit the slope of the Expander. After this at-tenuation, the control signal is delivered to the Channel’s control summing amplifier where it will meet similar signals generated by the Compressor control system.The Compressor controller works remarkably similarly to the Gate, the exception being the polarity. While the Gate circuit reduces gain when input level decreases below Threshold, the Compressor decreases gain when input increases above Thresh-old. The Compressor also receives the output of the controller, applies it to its threshold determinator, and passes the signalto the ratio attenuator if threshold conditions are satisfied. The output of the Ratio control is applied to the summing amplifier referenced in the gate section.Side Chain inserts have been provided on the rear of the unit to allow the insertion of an equalizer into the control circuits of the Gate and the Compressor. This will allow the user to create a frequency-dependent threshold for the Gate and/or the Compressor. This feature is useful when attempting to control sibilance in vocals.The Limiter operates in an entirely different manner than the preceding sections. The control circuit for the Limiter monitors the output of the VCA, not the input of the unit. Anytime the output of the VCA exceeds the Threshold set on the front panel, Limiting begins to take place. The ratio of the Limiter is set automatically and is a function of the excess level the system is attempting to deliver above the preset Threshold. The attack and release time of the Limiter is a function of the speed at which the input signal is attempting to drive the output of the unit above the Threshold level.The Crossover function of the DC 24 is based on Rane’s time-proven 4th-order state-variable Linkwitz-Riley design. This yields a 24 dB per octave slope and an in-phase characteristic. Since the outputs are in phase with each other, they recombine properly when the channel summing mode is selected via the rear panel Separate/Combine switch.In its band-split mode, the DC 24 allows separate processing of low frequencies and high frequencies; a mode which makes its operation all the more transparent. When the Crossover is used in conjunction with a two-way loudspeaker system, adequate driver protection may be ensured while providing a very flexible means of program manipulation.For a better view of the various operational modes, refer to “The DC 24 Users Guide” RaneNote, from the Rane website.。
mems imu 旋转调制

mems imu 旋转调制英文回答:MEMS Inertial Measurement Units (IMUs) and Rotation Modulation.MEMS (Microelectromechanical Systems) IMUs are small, low-power devices that measure linear acceleration and angular velocity. They are used in a variety of applications, including navigation, attitude control, and vibration measurement.Rotation modulation is a technique used in MEMS IMUs to improve the accuracy of angular velocity measurements. In rotation modulation, the IMU is rotated at a known frequency and the angular velocity is measured at different points in the rotation cycle. This allows the IMU to compensate for errors caused by the Coriolis effect and other factors.Rotation modulation is typically implemented using a dither motor. The dither motor rotates the IMU at a known frequency, and the angular velocity is measured using a piezoelectric sensor. The piezoelectric sensor generates a voltage proportional to the angular velocity, and this voltage is used to estimate the angular velocity of the IMU.Rotation modulation can significantly improve the accuracy of angular velocity measurements. In some cases, rotation modulation can improve the accuracy by a factor of 10 or more. This makes rotation modulation an essential technique for applications that require high-precision angular velocity measurements.中文回答:MEMS惯性测量单元(IMU)和旋转调制。
UDC3200类型数字控制器选型指南(PDF文件)说明书

51-51-16U-80Issue 17Page 1 of 3UDC3200 Universal Digital ControllerModel Selection GuideInstructionsSelect the desired key number. The arrow to the right marks the selection available.Make the desired selections from Tables I through VI using the column below the proper arrow. A dot ( ) denotes availability.Key Number----_ _ _ _ _- _KEY NUMBER - UDC3200 Single Loop ControllerIf ApplicableSelection Stocking P/NDigital Controller for use with 90 to 250Vac Power DC3200 Digital Controller for use with 24Vac/dc PowerDC3201TABLE I - Specify Control Output and/or AlarmsTABLE II - Communications and Software Selections0 _ _ _1 _ _ _2 _ _ _3 _ _ _ _ 0 _ __ A _ __ B _ __ C _ _No Selection_ _ 0 __ _ _ RInfrared interfaceInfrared Interface Included (Can be used with a Pocket PC)Software SelectionsStandard Functions, Includes Accutune Math OptionSet Point Programming (1 Program, 12 Segments) Set Point Programming Plus Math Reserved Solid State Relay (1 Amp) Plus Alarm 1 (5 Amp Form C Relay)_ A Open Collector Plus Alarm 1 (5 Amp Form C Relay)_ TCommunicationsNoneAuxiliary Output/Digital Inputs (1 Aux and 1 DI or 2 DI)RS-485 Modbus Plus Auxiliary Output/Digital Inputs10 Base-T Ethernet (Modbus RTU) Plus Auxiliary Output/Digital Inputs T _Dual 2 Amp Relays (Both are Form A) (Heat/Cool Applications)R _Output #2 and Alarm#1 or Alarms 1 and 2No Additional Outputs or Alarms _ 0One Alarm Relay Only_ B E-M Relay (5 Amp Form C) Plus Alarm 1 (5 Amp Form C Relay)_ E DescriptionAvailabilityOutput #1Current Output (4 to 20ma, 0 to 20 ma) C _Electro Mechanical Relay (5 Amp Form C)E _Solid State Relay (1 Amp)A _Open Collector transistor output_ _ _ _ _ __ __ _ _ __ _ __ _IIIIIIIVVVIUDC3200 ControllerNew! Easy To Use UDC3200 1/4 DIN Single Loop ControllerThe UDC3200 Controller packs new powerful features while retaining all the simplicity and flexibility of the industry standard UDC3300 Controller. Many new optional features include: - Enhanced Display- Built-in infrared communications port for configuring with a Pocket PC or Laptop - PC Based Configuration Tools - Ethernet Communications - Two Analog Inputs- Accutune III, Fast/Slow, Heat/Cool - Thermocouple Health Monitoring51-51-16U-80Issue 17Page 2 of 3ORDERING INSTRUCTIONS: These are provide as guidance for ordering such as those listed1. Part numbers are provided to facilitate Distributor Stock.2. Orders may be placed either by model selection or by part number.3. Part numbers are shown within the model selection tables to assist with compatibility information.4. Orders placed by model selection are systematically protected against incompatibility.5. Compatibility assessment is the responsibility of the purchaser for orders placed by part number.6. Items labeled as N/A are not available via the stocking program and must be ordered by model selection.AvailabilitySection 5Page: UDC-79Page 1 of 3UDC3200Supplemental Universal Digital Controller Accessories & Kits。
高一英语18-19学年上学期教学计划

周次
时间
第一周 8.6-8.12
第二周 8.1Biblioteka -8.19第三周 8.20-8.26 第四周 8.27-9.2 第五周 9.3-9.9 第六周 9.10-9.16 第七周 9.17-9.23 第八周 9.24-9.30 第九周 10.1-10.7 第十周 10.8-10.14 第十一周 10.15-10.21 第十二周 10.22-10.28 第十三周 10.29-11.4 第十四周 11.5-11.11 第十五周 11.12-11.17 第十六周 11.18-11.24 第十七周 11.25-12.1 第十八周 12.2-12.8 第十九周 12.09-12.15 第二十周 12.16-12.22 第二十一周 12.23-12.29 第二十二周 12.30-1.6 第二十三周 1.7-1.11 第二十四周 1.12-1.19 第二十五周 1.20-1.26
毕业班
联考(一) 联考(二)
焦作一模考试 联考(三) 联考(四)
焦作二模考试
非毕业班
高二调考 非毕业班一调考试 非毕业班二调考试 非毕业班期中考试 非毕业班三调考试 非毕业班四调考试
焦作期末考试
学期教学行事历
教学计划
复备M1U1--U2L2
复备M1U2L3--U3L4 军训 M1U1L1--L2 U1L3--L4 U2L1--L2 U2L3--L4 考试 U3L1--L2 U3L3--L4 期中复习 期中复习 期中复习 考试 M2U1L1--L2 M2U1L3--L4 考试 M2U2L1--L2 M2U2L3--L4 M2U3L1--L2 考试 M2U3L3--L4 期末复习 期末复习 考试
2024届河北省唐山市高三第一次模拟考试理综物理核心考点试题(基础必刷)

2024届河北省唐山市高三第一次模拟考试理综物理核心考点试题(基础必刷)一、单项选择题(本题包含8小题,每小题4分,共32分。
在每小题给出的四个选项中,只有一项是符合题目要求的)(共8题)第(1)题下列说法正确的是()A.在核聚变反应方程中,X表示中子B.发生光电效应时光电子的动能只与入射光的强度有关C.天然放射产生的三种射线中,穿透能力最强的是射线D.由玻尔理论可知,氢原子的核外电子由高能级跃迁到低能级时,要释放一定频率的光子,同时电子的动能减少,电势能增加第(2)题示波管的偏转电极上加的是待测的信号电压,偏转电极通常接入仪器自身产生的扫描电压。
现给加上如图甲所示的交流信号,如果要在荧光屏上观察到待测信号的稳定图像,那么给接入的扫描电压图像正确的是( )A.B.C.D.第(3)题如图,一长为L的轻杆两端分别用铰链与质量均为m的小球A、B连接,A套在固定竖直杆上,B放在倾角的斜面上。
开始时,轻杆AB与竖直杆的夹角。
现将轻杆由静止释放,A沿竖直杆向下运动,B沿斜面下滑。
小球均可视为质点,不计一切摩擦,已知重力加速度大小为g。
下列判断正确的是( )A.A碰到斜面前瞬间,B重力的功率为零B.A碰到斜面前瞬间,B的速度大小为C.A碰到斜面前瞬间,A的速度大小为D.B下滑过程中,A重力势能的减少量等于A、B动能增加量之和第(4)题如图MNPQ—M′N′P′Q′为正方体,MQ和M′N′处有完全一样的、均匀带正电的绝缘棒,O为正方体的中心。
已知MQ产生的电场在O点处的场强大小为E0,则O点处的合场强大小为()A.E 0B .C .D .2E 0第(5)题雾霾的一个重要来源就是工业烟尘。
为了改善空气环境,某热电厂引进了一套静电除尘系统。
它主要由机械过滤网,放电极和互相平行的集尘板三部分构成。
工作原理图可简化为如图所示。
假设虚线为某带电烟尘颗粒(不计重力)在除尘装置中的运动轨迹,A 、B 是轨迹中的两点( )A .该烟尘颗粒带正电B .烟尘颗粒在A 点的动能大于在B 点的动能C .烟尘颗粒在A 点的电势能大于在B 点的电势能D .该烟尘颗粒在A 点的加速度小于在B 点的加速度第(6)题如图所示,理想变压器原、副线圈匝数比为,输入端C 、D 接入电压有效值恒定的交变电源,灯泡、的阻值始终均为。
基于短时弛豫电压与IBAS-BP网络的SOH估算

基于短时弛豫电压与IBAS-BP网络的SOH估算
张家乐;王泰华;李亚飞
【期刊名称】《陕西科技大学学报》
【年(卷),期】2024(42)1
【摘要】为提高锂电池健康状态(SOH)的在线估算精度,提出一种基于短时弛豫电压与IBAS-BP网络的SOH估算方法.首先,通过分析不同静置时间的弛豫电压与SOH的关系,选取10秒时的弛豫电压曲线进行特征提取,采用主成分分析法对所提取特征融合与降维,降低模型复杂度和特征间的冗余.其次,通过动态步长和S型权重改进BAS算法并对BP网络的初始权阈值寻优,建立IBAS-BP网络.再次,利用MD-MTD增强的数据训练IBAS-BP网络实现SOH估算.结果表明,由10秒内的弛豫电压中所提取的特征能有效反应电池的老化,可用于SOH的估算;与其它模型相比,所建IBAS-BP模型的估算精度更高,误差均保持在0.5%以内.最后,基于所提方法利用LabVIEW搭建了一种模拟电池在环管理系统,为电池安全管理提供了参考依据.【总页数】10页(P144-152)
【作者】张家乐;王泰华;李亚飞
【作者单位】河南理工大学电气工程与自动化学院
【正文语种】中文
【中图分类】TM912
【相关文献】
1.基于Elman神经网络的锂电池SOH估算
2.基于卷积神经网络的锂离子电池SOH估算
3.基于FA-BP神经网络的锂离子电池SOH估算
4.基于BI-LSTM神经网络的宽采样频率电池SOH估算
5.基于主成分分析与ILM-DGRBF网络的SOH 估算
因版权原因,仅展示原文概要,查看原文内容请购买。
一种结合路由器旁路通道的低延迟NoC容错机制

一种结合路由器旁路通道的低延迟NoC容错机制
刘江;张金艺;周多;周文强
【期刊名称】《微电子学与计算机》
【年(卷),期】2015(0)4
【摘要】提出一种结合路由器旁路通道的低延迟NoC容错机制,该机制首先在路由器内部增加了旁路通道和检错装置,来实现NoC的容错;其次在容错路由算法中引入了多级拥塞控制的理念,来降低NoC的网络延迟.通过使用NIRGAM平台进行仿真,实验结果表明,所提出的容错路由算法与ASL-XY算法以及低延迟可靠传输算法相比,网络平均延迟有明显的降低,并且随着数据包注入速率的增大,并且此算法的网络平均延迟增长率要明显缓于其他两种算法.
【总页数】5页(P10-14)
【关键词】片上网络;容错;低延迟;路由器
【作者】刘江;张金艺;周多;周文强
【作者单位】上海大学微电子研究与开发中心;上海大学特种光纤与光接入网省部共建教育部重点实验室;上海大学教育部新型显示与系统应用重点实验室
【正文语种】中文
【中图分类】TN915.05
【相关文献】
1.一种高吞吐低延时NoC容错路由算法 [J], 韦良芬;张佑生;王勇
2.NoC 中相邻虚通道循环共享的 VOQ 容错路由器设计 [J], 欧阳一鸣;王悄;梁华
国;易茂祥;汪秀敏
3.基于虚通道故障粒度划分的3D NoC容错路由器设计 [J], 欧阳一鸣;张一栋;梁华国;黄正峰;常郝
4.一种无虚通道NoC负载均衡容错路由算法 [J], 刘鹏;徐海鹏;崇云锋;赵倩情
5.一种低延迟的无虚通道NoC容错路由算法 [J], 李娇;徐海鹏;崇云锋;刘鹏;冉峰因版权原因,仅展示原文概要,查看原文内容请购买。
小学英语新外研版(一起)三年级上册M1U1 教案

T: Amy is hungry. What is she eating? Ss: noodles. T: Good! When we eat noodles, we use...? (Show a pair of chopsticks) Ss: Chopsticks. Teach the new word chopsticks and use.
2.Show some pictures about different food.
T:Which one do you like? S1: I like... T: How can you eat it? Ss can answer me in Chinese, and then I will teach the new words: chopsticks, knife and fork using some pictures or some chopsticks, knives or forks.
Ss can use Chinese to express the key points.
Step5: Homework
1.基础性作业:Listen and repeat the dialogue, and write down the newwords for three times.
2.提高性作业:Try to imitate and recite the dialogue.
Step2: Presentation
1.Show the 1stpicture of the dialogue and have Ss observe it carefully.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Tapescript Mark: Things I find stressful. Well, I really hate ... mm ... doing exams. Mm, I get very nervous the night before, you know. And I can't sleep, you know what I mean? I'm also shy and I don't like going to parties very much. I prefer meeting people in small groups, you know. Ah, there's another thing - in French lessons I can't stand talking in front of the class, er, I get nervous and mm, make lots of mistakes. Things I find relaxing? Well, mm, I like a lot of things. I love talking to my friends. And when I'm tired and want to relax I enjoy listening to music and I also like reading. Ah, and I quite like sitting and doing nothing!
Doctor: Well, anybody can suffer from stress. There stressful are certain jobs that are very _________, like some jobs in business or the police. But, probably police. everyone suffers from stress at some time in their life- students, doctors, factory workers-anybody. lifeworkers-anybody. Presenter: But, what really causes it? different Doctor: There are ___________reasons. One is time study pressures and __________ of work and______. At school, for example, student ________can become very stressed s
Speaking: Work in groups of four. Take turns to talk about activities you like and don’t like. Talk for as long as you can. Use hesitation words to give you time to think of ideas while you are speaking.
北师大高中英语第一模块
Unit 1 Lifestyles
Relaxing
Before you start Step 1
♦ I find … very … ♦ I think … is quite… ♦ In my opinion, … is ♦ I have to say that … is … ♦ I agree. But… ♦ I can’t agree more. I … ♦ Maybe, but …
Step 4 Listen to the interview and check your predictions.
Tapescript: Presenter: Good morning and welcome Lifestyles to__________. Today we’re going to look at _________– what ________it and what we can do to stress causes _________and prevent it. We have in the studio Dr relax expert Klinsmann, an ________on stress. Good morning, Dr Klinsmann. Doctor: Good morning. Presenter: Dr Klinsmann…er…what kinds of people often ________from suffer ______stress?
Step 6. Listen to Mark and complete the table.
stressful activities doing exams going to parties talking in front of the class in French lessons relaxing activities talking to friends listening to music reading sitting and doing nothing
Look at the pictures on page 10 and say what kind of relaxing forms they are. listening to music riding in the country playing golf …
Step 2 You will hear the following words in the interview. Use them to complete the sentences. Answers: 1 2 3 4 5 6 7 8 Stress studio social is suffering from pressure reduce organise expert
Step 5 Now listen again and answer these questions.
1: When do students suffer from stress? When they have a lot of homework to do and they feel they haven’t got enough time to do it all. 2: What social occasion can be difficult for shy people? Parties.
Ask the Ss to tell the exact meaning in English about relaxing and stressful. relaxing adj. having a rest; becoming less tense; taking one's ease stressful adj. full of or tending to cause stress
3: What is a good way of organising work or studies? Make a list and do all the important things first. 4: Who can people talk to about their problems? They can talk to a friend, some one in their family, or if they’re studying, talk to their teachers.
But to answer your question, there are lots of things you can do to _______ stress. You can reduce organize ________your work or studies. For example, you list important can make a _____ and do all the _________ things first. You must eat well- have a good _____ - and of diet Finally course do exercise often._______, you can talk to people about your problems- talk to a friend, someone in your family or, if you’re studying, talk to a teacher. You can also do special exercises. Presenter: Can you __________ some of these… describe
Step 3 Try to predict the answers. Moe than one answer is possible. Give reasons for your choice, for example: I think the students can suffer from a lot of stress because they have too much homework to do and lots of tests and exams. Answers: 1. a b c d 2. b c 3. a c d
when they have a lot of ____________to do and homework they feel they haven’t got enough time to do it social all. Other reasons can be _______- if you have a problem with your family or friends or at school. And it has something to do with the person- if you’re____, social occasions like parties can be shy very stressful too. Presenter: And what can you do to stop stress and worry? Because stress is very bad for you, isn’t it? Doctor: Yes, it can cause a lot of _______problems. health