一种新型六旋翼飞行器的设计
六旋翼无人机飞行原理

六旋翼无人机飞行原理
六旋翼无人机是一种采用六个电动马达和旋翼组成的飞行器。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
六旋翼无人机采用的是旋翼的飞行方式。
旋翼是一种产生升力的设备,它的旋转使空气产生向下的压力,从而使飞机升空。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
六旋翼无人机采用的是电动马达产生动力。
电动马达是通过电能转化成机械能,带动旋翼旋转产生上推力。
六旋翼无人机的电动马达需要具有高功率和高效率,能够产生足够的推力以支持无人机的飞行。
六旋翼无人机还采用了先进的控制系统。
控制系统可以通过无线电通讯,实现对无人机的遥控和自主控制。
遥控器可以通过无线电信号,控制无人机的上下、前后、左右和旋转方向。
自主控制则是通过内置的传感器和计算机,实现对无人机的自主飞行和导航。
六旋翼无人机还具有良好的稳定性能。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
此外,六旋翼无人机还采用了先进的控制系统,能够实现对无人机的精确控制和稳定飞行。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
它采用了先进的控制系统,能够实现对无人机的遥控和自主控制,并具有良好的稳定性能。
未来,六旋翼无人机将会被广泛应用于物流配送、农业植保、环境监测和消防救援等领域,成为未来无人机市场的重要组成部分。
六旋翼飞行器飞行原理
六旋翼飞行器飞行原理六旋翼飞行器是一种多旋翼飞行器,由六个旋翼组成。
它以人类飞行的方式为灵感,通过模拟鸟类的翅膀和昆虫的翅膀来实现飞行。
六旋翼飞行器的飞行原理可以分为四个关键步骤:升力产生、姿态控制、稳定性维持和操纵。
六旋翼飞行器通过旋转的旋翼产生升力。
每个旋翼都由一个电动机驱动,通过快速旋转产生的气流产生向上的力量,从而使飞行器能够离开地面。
旋翼的旋转速度和叶片的设计决定了产生的升力大小。
姿态控制是六旋翼飞行器飞行的关键。
通过改变每个旋翼的旋转速度和叶片的角度,飞行器可以改变自身的姿态。
通过适时地调整旋翼的动力输出,飞行器可以向前、向后、向左或向右倾斜,实现不同的飞行方向。
姿态控制的准确性和灵活性直接影响飞行器的操纵性能。
稳定性维持是飞行器飞行过程中必须解决的问题。
六旋翼飞行器通过配备陀螺仪、加速度计和气压计等传感器来感知自身的姿态和环境的变化。
这些传感器会将数据传输给飞行控制系统,从而实现对飞行器的稳定控制。
根据传感器提供的数据,飞行控制系统会自动调整旋翼的转速和叶片的角度,以保持飞行器的稳定性。
操纵是六旋翼飞行器飞行的关键。
通过遥控器或自主飞行系统,操作者可以向飞行控制系统发送指令,控制飞行器的飞行方向、速度和高度。
飞行控制系统会根据接收到的指令,调整旋翼的动力输出和姿态控制,实现飞行器的操纵。
总结起来,六旋翼飞行器的飞行原理可以概括为:通过旋翼产生升力,通过姿态控制调整飞行器的姿态,通过稳定性维持保持飞行器的稳定性,通过操纵实现飞行器的操纵。
这种飞行器以其独特的设计和飞行方式,为人类带来了全新的飞行体验,拓宽了人类的视野和想象力。
无论是在航空领域还是其他领域,六旋翼飞行器都具有广阔的应用前景。
无人机六旋翼设计

摘要六旋翼无人机是一种具有可垂直起降能力的小型无人飞行器,它通过上下共轴放置的三组共六个电机提供升力,通过改变旋翼转速来调整姿态,通过调整姿态进一步实现位置控制,具有悬停性能优异、移动灵活、机械结构紧凑、零部件可靠性高等优点。
论文首先对六旋翼无人飞行器的调姿原理进行了介绍,分析了其飞行姿态的调整方式。
并建立了六旋翼无人机的数学模型,根据实际情况对其数学模型进行了必要的简化。
接着,论文完成了对于六旋翼无人机控制系统硬件平台的组建,组建了高精度的传感器系统,并完成了飞行控制器硬件的设计与实现,完成了硬件调试工作以及驱动的编写工作。
然后,论文建立了六旋翼无人机的完整控制系统,其中包含位置控制部分、高度控制部分以及姿态控制部分,建立了一套完整的对姿态传感器进行机械防震与数字滤波的方法;提出了一种新颖的气压计、超声波传感器和加速度计的融合方法,通过实验验证了滤波效果;提出了一种优化的拉力分配方法使得控制系统的可靠性得到增强。
接着,论文设计实现了飞行控制软件的主要功能,从技术层面上对于实时性与可靠性进行了大幅的提升。
最后,论文通过悬停试验验证了姿态控制器的控制精度;通过抗干扰能力试验验证了姿态控制器的稳定性;通过信号跟踪试验验证了姿态控制器的跟踪性能;通过高度控制实验验证了高度控制器的控制性能;通过视频跟踪实验验证了六旋翼无人机整体控制架构的合理性与有效性。
关键词:六旋翼无人机;PID;多环路控制;数据融合VI哈尔滨工业大学本科毕业设计(论文)AbstractHex-rotor is one kind of small unmanned aerial vehicles (SUAV) which have theability of vertical take-off and landing (VTOL). It gets thrust by controlling six rotorswith propellers which are divided into 3 groups of coax ial rotors. Its attitude is controlledby regulating the spinning speed of the rotors which in turn makes its positioncontrollable .The hex-rotor has multiple advantages such as the ability of vertical take-off and landing, good mobility and high reliability. Therefore, thehex-rotor has broadapplication prospects and enormous value of research.Firstly, the flying principle was divided into four main modes of motion and analyzedseparately. The dynamic model of the hex-rotor SUAV was deduced with some necessarysimplifications.Then, the control system hardware was built using high-precision sensors.The workof debugging the hardware and programming th e drivers was also done.In the following, the main control scheme was proposed which composed of threemain controllers: position controller, height controller and attitude controller. A completesolution to reduce the noise in the g yroscope and accelerometer caused by vibration wasproposed including mechanical anti-vibration method and a digital filter called alpha-betafilter. A new method of fusing the data f rom ultrasonic sensor, barometer andaccelerometer was prop osed in the paper. Experiment was conducted to prove theeffectiveness of the fusion method. An optimized thrust distribution method was alsointroduced to maintain the robustness of the system. Some technology was alsointroduced to keep the real-time performance and reliability of the control software.Finally, some flight experiments were introduced to prove theperformance of thecontroller: hovering test for the controller accuracy,anti-interference for controllerstability, signal-tracking experiment for controller tracking capability and vision-basedtarget tracking for the overall system performance.Keywords: Hex-rotor, PID, Multi-loop, Data-fusion哈尔滨工业大学本科毕业设计(论文)目录摘要 (VI)Abstract (VII)第1章绪论 (1)1.1 论文研究的目的与意义 ...................................................................... .. (1)1.2 国内外研究现状 ...................................................................... .. (2)1.2.1 四旋翼无人机的研究现状 .................................................................... (3)1.2.2 六旋翼无人机的研究现状 .................................................................... (4)1.2.3 六旋翼控制理论研究现状 .................................................................... (6)1.3 本文主要研究内容 ...................................................................... . (6)第2章六旋翼无人机数学模型的建立 (8)2.1 六旋翼无人机飞行机理分析 ...................................................................... (8)2.1.1 坐标系定义 .................................................................... (8)2.1.2 四种基本运动 .................................................................... (9)2.2 六旋翼无人机机体结构设计 ...................................................................... . (10)2.2.1 机架选型 .................................................................... (10)2.2.2 动力系统设计 .................................................................... (11)2.3 运动方程的推导 ...................................................................... (11)2.4 本章小结 ...................................................................... (16)第3章六旋翼无人机硬件设计 (17)3.1 总体方案 ...................................................................... (17)3.1.1 无线通讯链路 .................................................................... .. (17)3.1.2 传感器系统 .................................................................... (18)3.1.3 执行器与数据保存 .................................................................... (18)3.2 传感器系统 ...................................................................... .. (19)3.2.1 姿态传感器 .................................................................... (19)3.2.2 高度传感器 .................................................................... (19)3.2.3 位置传感器 .................................................................... (20)3.3 飞行控制硬件设计 ...................................................................... .. (20)3.3.1 主控制器选型 .................................................................... .. (20)3.3.2 电源、通讯接口设计 .................................................................... .. (21)3.3.3 数据存储设计 .................................................................... .. (21)VIII3.4 第 4 章4.1 4.2 哈尔滨工业大学本科毕业设计(论文)本章小结 (22)六旋翼无人机控制算法设计.................................. 23 总体控制结构 ................................................................. (23)姿态控制 ................................................................. (24)4.2.1 4.2.2 4.2.3 姿态传感器的减震与滤波 (24)姿态控制器结构 ............................................................. (28)转速分配策略 ............................................................. (28)4.3 高度控制 ................................................................. (31)4.3.1 4.3.2 4.3.3 超声传感器的滤波 (31)高度传感器与加速度计的融合算法 (34)高度控制器结构 ............................................................. (37)4.4 4.5 第 5 章5.1 位置控制 (37)本章小结 ................................................................. (38)六旋翼无人机飞控软件设计与飞行试验........................ 39 飞控软件设计 ................................................................. (39)5.1.1 5.1.2 5.1.3 飞控软件功能设计 (39)飞控软件总体架构 ............................................................. (40)实时性与可靠性设计 ............................................................. (40)5.2 飞行试验 ................................................................. (41)5.2.1 5.2.2 5.2.3 5.2.4 5.2.5 悬停测试 (42)抗干扰能力测试 (43)信号跟踪实验 ............................................................. (43)高度控制实验 ............................................................. (44)视觉跟踪实验 ............................................................. (45)5.3 本章小结 ................................................................. (45)结 论.......................................................... 47 参考文献.......................................................... 48 哈尔滨工业大学本科毕业设计(论文)原创性声明 ....................... 51 致 谢.......................................................... 52 附 录 (53)IX第1章 绪 论1.1 论文研究的目的与意义近年来,在民用领域,无人机技术在救灾、航拍、农业、侦查等各个领域内取 得了广泛的关注与研究。
飞行器本科毕业论文选题(1299个)
飞⾏器本科毕业论⽂选题(1299个)毕业论⽂(设计)题⽬学院学院专业学⽣姓名学号年级级指导教师毕业教务处制表毕业⼆〇⼀五毕业年⼗⼆⽉毕业⼀⽇飞⾏器与毕业论⽂选题(1299个)⼀、论⽂说明本写作团队致⼒于毕业论⽂写作与辅导服务,精通前沿理论研究、仿真编程、数据图表制作,专业本科论⽂300起,具体可以联系⼆、论⽂参考题⽬《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养“中航⼯业杯”⽆⼈飞⾏器Yuneec Q500航拍⼀体飞⾏器Zano微型航拍四轴飞⾏器航天战术飞⾏器质量管理信息系统分析设计智能测污飞⾏器安卓⼿机遥控电动A4纸折微型飞⾏器总体设计为飞⾏器摄影⽽⽣:空中摄影附件⼤⽐拼浅谈⼩型低速航空飞⾏器造型美学基于DSP的多轴⽆⼈飞⾏器设计亚拓M690L多轴飞⾏器浅析电动多旋翼飞⾏器的设计及其在农业领域中的应⽤⼀种⾼级飞⾏器测试数据时域判读⽅法⾼超声速飞⾏器上升段轨迹优化了不起的飞⾏器微型飞⾏器的⼩幅运动⽓动⼒建模研究六旋翼飞⾏器容错控制算法我最喜欢的玩具——愤怒的⼩鸟发光感应飞⾏器折叠式飞⾏器机翼展开装置的技术研究⾼超⾳速飞⾏器⽓动热研究进展新型四旋翼飞⾏器设计与制作某型海⾯飞⾏器⽤阀门断裂原因的失效分析另类“单⼈飞⾏器”⽆⼈旋翼飞⾏器⾃适应飞⾏控制系统设计多功能探测智能四轴飞⾏器的研制分析亚拓M480L多轴飞⾏器基于⽆⼈飞⾏器和GIS的防汛抗旱监测系统基于ANSYS的四轴飞⾏器机架振动分析四旋翼飞⾏器多传感器硬件的电路设计基于PID神经⽹络的四旋翼飞⾏器控制系统研究输电线路精细化故障查找飞⾏器研制及应⽤⼩型四轴飞⾏器控制器设计的研究校园空中监管四轴飞⾏器的设计动⼿做⽓球飞⾏器新型涵道⽆⼈飞⾏器飞⾏控制策略研究基于四轴飞⾏器的PID姿态控制系统基于X—Bee和STM32F407的四轴飞⾏器设计基于飞⾏器的复杂零件⾃动加⼯及组装技术的研究飞⾏器坠海咋打捞?四旋翼飞⾏器飞⾏轨迹的仿真研究视觉导航的四轴飞⾏器控制系统设计农⽤⽆⼈遥控飞⾏器优势和效益分析可续航三栖探测飞⾏器系统设计与实现基于DSP的四旋翼⽆⼈飞⾏器控制系统基于WIFI的智能多功能微型四旋翼飞⾏器设计四轴飞⾏器的姿态研究与设计基于ARM的⼀种⽆⼈航拍旋翼飞⾏器设计“空中牧⽺⽝”让飞⾏器竞赛更具挑战与趣味性⼀种垂直起降飞⾏器四旋翼飞⾏器的设计与仿真分析北京航天长征飞⾏器研究所“图像去模糊技术”国际领先扑翼式飞⾏器的发展与展望飞⾏器健康监控的概念及其发展飞翔的歌利亚:超级飞⾏器狂想⾼超声速飞⾏器建模研究基于分布估计算法的弹性飞翼飞⾏器多操纵⾯控制分配基于Multiwii的开源四轴飞⾏器⼀种新型⽆⼈机⼩型化飞⾏器管理计算机的设计实现美空军科学咨询委员会评估⾼超声速飞⾏器技术成熟度基于OPC技术的飞⾏器测试与控制系统设计Mil—1394b总线在飞⾏器管理系统中的典型应⽤分析飞⾏器供电系统最⼤功率跟踪与测试技术研究微型飞⾏器悬臂谐振分析⾼空长航时飞⾏器⾃主导航系统研究及试验验证电动多旋翼飞⾏器的特点及其在农业中的应⽤带魔⼒的球球飞⾏器⽤KT板制作四轴飞⾏器机架的可⾏性电⼒巡线⽤四旋翼飞⾏器软硬件设计地效飞⾏器的发展及其军事应⽤⾃动航⾏飞⾏器设计变结构飞⾏器的故障诊断与容错控制盘点全球⼋⼤奇葩飞⾏器从中国⾼超声速导弹试验谈亚轨道飞⾏器⼀种警⽤可折叠六旋翼飞⾏器设计漫谈多轴飞⾏器的操纵⽅式基于Fluent的飞⾏器⽓动参数计算⽅法基于STM32单⽚机的三叶浆四旋翼飞⾏器设计四轴飞⾏器仿真系统设计滑翔飞⾏器威胁区规避算法研究魔⽅型深空探测飞⾏器未来变体⽆⼈飞⾏器的关键技术太空飞⾏器的空⽓动⼒学数据新型飞⾏器航空飞⾏器的结冰与防冰四旋翼飞⾏器控制系统设计基于⼿机WIFI通信的空中探测飞⾏器研制基于GPS及光流传感器的四旋翼飞⾏器四翼飞⾏器⽤于紧急运输的⽹络设计低空探测飞⾏器的改装及其在现代⽓象服务中的应⽤四旋翼飞⾏器增稳混合控制器求破解之法⾼超声速飞⾏器的拦截和防御基于⼴义逆矩阵求解的空间飞⾏器的定位7旬⽼⼈欲研制出⽆动⼒飞⾏器微型旋翼飞⾏器的现状分析和发展趋势初探英国⼈设计“怪物”飞⾏器结合飞艇、飞机、直升机的世界最长飞⾏器基于PIV原理的微型扑翼飞⾏器流场试验台遥控飞⾏器航拍在建设⼯程中的应⽤基于Mahony滤波器和PID控制器的四旋翼飞⾏器姿态控制飞⾏器制造⼯程专业教学⽅法改⾰模式研究⾼超声速飞⾏器的滑模预测控制⽅法⾼超⾳速飞⾏器引领空天武器新趋势飞⾏器⾥的好⼩伙多学科设计优化算法及其在飞⾏器设计中应⽤太阳帆飞⾏器⾃适应极点配置控制⽅法研究低空飞⾏器即时航迹评估⽅法及模型⾼空飞⾏器供油驱动系统IGBT模块结温特性研究综合化飞⾏器管理计算机技术研究虚拟制造技术在飞⾏器设计中的应⽤⽆⼈机飞⾏器通信链路抗⼲扰性能⽐较研究四旋翼⾃主飞⾏器系统发展中的飞⾏器射频隐⾝技术⼈造昆⾍——微型飞⾏器飞⾏器:作为艺术的喷⽓机飞⾏器设计的多参数决策matlab的模拟实现马丁飞⾏器宫崎骏关键词:少⼥,森林,飞⾏器四旋翼⾃主飞⾏器私⼈航天飞⾏器各显神通传说中的磁单极飞⾏器基于FPGA的⽆⼈飞⾏器温度巡检装置的设计蜂窝与太空飞⾏器地效飞⾏器周围流体场数值模拟国外⾼校浮空飞⾏器学⽣创新实践活动的发展与启⽰飞⾏器⼤型薄壁件制造的柔性⼯装技术临近空间⾼超声速飞⾏器建模与控制研究进展⾼速飞⾏器直接⼒/⽓动⼒复合控制技术综述多旋翼飞⾏器在输电线路巡维的应⽤飞⾏器⽼牌电⽓公司的飞⾏器德国西门⼦-舒克特SSW D.III/D.IV战⽃机关于脑电波控制飞⾏器的研究现状概述基于粒⼦群算法的再⼊式飞⾏器再⼊⾛廊计算⽅法研究⼀种飞⾏器测控电源的实时监测装置设计与实现⾼超⾳速飞⾏器呼之欲出基于科研资源向教学资源转化的飞⾏器结构⼒学的本科教育研究与实践飞⾏器吸⽓式⾼超声速飞⾏器纵向运动反演控制器设计四轴飞⾏器⽆刷直流电机驱动技术研究康达效应飞⾏器研究及应⽤飞⾏器的那些事SINS/CNS组合导航对⾼空飞⾏器再⼊精度的影响有输⼊饱和的⽋驱动VTOL飞⾏器滑模控制飞⾏器跳“龙门”临近空间飞⾏器发展概况外星飞⾏器没有来!俄研制新型地效飞⾏器“驭波者”来袭美国空军X—51A⾼超⾳速飞⾏器试验成功基于改进互补滤波器的低成本微⼩飞⾏器姿态估计⽅法基于⽆线传感器⽹络的飞⾏器结构健康监测系统的关键技术研究与应⽤某飞⾏器温度遥测参数异常分析对四轴飞⾏器的姿态控制器的设计与仿真⼗⼤即将实现的未来飞⾏器做⼀架⽓垫飞⾏器贴地飞⾏器再⽣源于SAAB的灵魂战车—北汽绅宝柔性与刚性机翼微型飞⾏器⽓动特性差异研究动基座飞⾏器故障弹道仿真飞⾏器三维轨迹动态显⽰系统的设计基于Matlab/Simulink的飞⾏器全数字仿真平台的设计基于测向阵列的空中飞⾏器瞬时⽆源定位完美主义飞⾏器未来飞⾏器未来飞⾏器微探飞⾏器电⼒巡检欧洲航天局透露“⾼速试验飞⾏器”计划细节⾃主学习教学⽅法在“飞⾏器⾃主导航”课程中的应⽤体会发展中的飞⾏器射频隐⾝技术“创新杯”第五届全国未来飞⾏器设计⼤赛获奖作品选登ADS—B飞⾏器航迹监视的三维可视化探讨世界上最⼩的亚轨道载⼈飞⾏器四旋翼⽆⼈飞⾏器混合控制系统研究神奇的意念遥控飞⾏器“创新杯”第五届全国未来飞⾏器设计⼤赛颁奖仪式在珠海召开天津滨海⾼新区特种飞⾏器研发基地⼆期开⼯超⾼速飞⾏器可数⼩时飞越太平洋等选择哪些飞⾏器航拍?雷震⼦与⼩型飞⾏器⼀起来做四轴飞⾏器(下)基于四杆机构对仿⽣蜻蜓扑翼飞⾏器的设计优化与仿真近空间飞⾏器故障诊断与容错控制的研究进展基于QFT的四旋翼飞⾏器飞⾏控制算法研究美国飞⾏器图形⼀起来做四轴飞⾏器(上)微型飞⾏器像昆⾍那样飞⾮常规布局的斜掠翼飞⾏器微型飞⾏器像昆⾍那样飞⾼超声速飞⾏器参数化⼏何建模⽅法与外形优化X基于单⽬视觉的室内微型飞⾏器位姿估计与环境构建“飞航杯”全国⾸届未来飞⾏器设计⼤赛揭晓明天,乘什么样的飞⾏器去旅⾏临近空间环境对临近空间飞⾏器的影响乘波者飞⾏器,⼀⼩时打击全球随⼼所欲飞⾏器⽔上飞⾏器做椭圆运动的飞⾏器近地点速度范围的浅显证明从天宫⼀号的发射看飞⾏器的空间交会对接使⽤GPS传感器的飞⾏器⾃动抛物系统设计扇翼飞⾏器模型的设计与制作Vega环境下的某飞⾏器视景仿真的实现教你调试单轴飞⾏器四旋翼微型飞⾏器设计⽇本⾼超声速飞⾏器技术发展解析基于DSP的发射控制系统在提⾼飞⾏器发射精度中的应⽤TYPE 20飞⾏器腕表碟影重重探秘国外圆盘形飞⾏器飞⾏器发展史遥控飞⾏器与摄像机——派诺特AR.Drone 2.0“天宫⼀号”飞⾏器发射的地理⾓度分析关于四轴飞⾏器的姿态动⼒学建模飞⾏器飞⾏⼯况视频监测及图像处理“航天创意杯”新概念飞⾏器创新⼤赛落下帷幕“猎户座”嬗变:从乘员探测飞⾏器到多⽤途载⼈飞船⼀款“KK”板单轴飞⾏器亚特兰蒂斯的飞⾏器飞⾏器制造⼯程专业实践教学体系完善研究通古斯之谜⼜有新说祸⾸疑是天外飞⾏器视频跟踪四旋翼飞⾏器创新实验系统明天,乘什么样的飞⾏器去旅⾏对“天宫⼀号”⽬标飞⾏器发射成功的多⾓度思考基于DE算法的再⼊飞⾏器横向机动能⼒研究基于改进粒⼦群算法的再⼊飞⾏器轨迹优化基于BP⽹络的飞⾏器解耦设计美披露外⼤⽓层杀伤飞⾏器陆基拦截试验失败原因飞⾏器机翼布局对雷达隐⾝性能影响探讨⼀种新飞⾏器的设想Evolution of Aircrafts飞⾏器发展史未来50年的概念飞⾏器直升机/喷⽓机混合飞⾏器⾸届中航⼯业杯——国际⽆⼈飞⾏器创新⼤奖赛闭幕天宫⼀号⽬标飞⾏器发射升空后准确进⼊预定轨道绿⾊飞⾏器的梦想与现实乘着⽉亮的飞⾏器中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办晶体硅电池在太阳能飞⾏器上的选择与应⽤(下)“KK”飞控板系列飞⾏器的制作基于⾃适应逆的微型飞⾏器飞⾏控制系统美研制微型飞⾏器晶体硅电池在太阳能飞⾏器上的选择与应⽤晶体硅电池在太阳能飞⾏器上的选择与应⽤(上)探索近空飞⾏器创新永不⽌步飞⾏器专业开设基于多知识点的综合性\设计性实验的研究⼈类最早的飞⾏器《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养⾃转旋翼/机翼组合构型飞⾏器飞⾏动⼒学特性旋翼飞⾏器飞⾏动⼒学系统辨识建模算法飞⾏器等离⼦体隐⾝技术及研究现状飞⾏器的翅膀美国轨道试验飞⾏器X-37B⽇内⽡国际车展飞⾏器的化妆舞会基于MATLAB的⽆⼈飞⾏器两点交会定位算法研究基于TVARMA的飞⾏器结构响应序列参数谱估计“天宫⼀号”⽬标飞⾏器的搭载⽅案评审结果揭晓中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办美国公布⾼超声速试验飞⾏器试飞失败原因Draganfly四旋翼微型飞⾏器⾯向分级设计优化的飞⾏器参数化建模⽅法未来太空飞⾏器⼤曝光玛雅⽯板上的宇宙飞⾏器之谜X-37B“轨道试验飞⾏器1号”美国X系列飞⾏器(四)垂直极限的挑战⼀种飞⾏器综合健康管理系统决策⽀持层的设计⽅法飞⾏器⼤振幅运动实验与⽓动⼒建模飞⾏器隐⾝技术现状及其未来发展趋势个⼈飞⾏器显⾝⼿研制超微型飞⾏器成世界新趋势⽹络中⼼战的空中多⾯⼿:⽆⼈飞⾏器⼩波变换在飞⾏器遥测数据分析中的应⽤全⾃动航测测量系统MAP-Ver 在⽆⼈飞⾏器低空航摄数据处理中的应⽤飞⾏器板结构中Lamb波解析建模研究“怪物”飞⾏器上班族的飞⾏器美国X性系列飞⾏器⼀开启空间战争新时代?难以证实的古代宇宙飞⾏器之谜未来的飞⾏器数学专业:飞⾏器环境与⽣命保障⼯程考虑迟滞⾮线性的⾼超声速飞⾏器颤振分析伞翼飞⾏器折叠式飞⾏器等多⼯况下⾼超声速飞⾏器再⼊时流场的计算新型电⼒飞⾏器“帕分”等2则彩笔“飞⾏器”通⽤再⼊飞⾏器空间作战飞⾏器⽔动⼒穿戴式飞⾏器⾛近轻型运动飞⾏器“磁悬浮”:零⾼度飞⾏器飞⾏器电⽓接⼝⾃动测试系统设计关于飞⾏器振动仿真模拟的分析飞⾏器仪器舱混响室声环境实验研究和数值模拟折叠式飞⾏器·GPS定位鞋等超轻型飞⾏器的设计制作和试飞倾转双涵道风扇单⼈垂直起降飞⾏器抗震救灾的飞⾏器基于有限状态机的飞⾏器⾃毁系统时序控制设计近空间飞⾏器及其关键材料临近空间飞⾏器⾼超声速飞⾏器多约束参考轨迹快速规划算法基于CMAC⽹络的飞⾏器再⼊标准轨道制导基于INA-QFT的⾼超声速飞⾏器鲁棒控制器设计飞翼式飞⾏器结构布局与构件尺⼨的两级优化近空间飞⾏器的DSF:vsat鲁棒快速Terminal滑模控制⼗⼤杰出飞⾏器太空飞⾏器如何调控温度(下篇)UFO飞⾏器即将上市和飞⾏器相关的专业有哪些等太空飞⾏器如何调控温度(上篇)宇宙飞⾏器上带的电⼦脑袋新型飞⾏器飞⾏器的电磁⼒制动亚轨道飞⾏器返回段动⼒学虚拟样机设计⼤⽩丁博⼠的助⼒飞⾏器基于wince的飞⾏器姿态采集系统的设计与实现灵巧型军民通⽤交通⼯具——飞⾏家三栖飞⾏器基于遗传算法的飞⾏器路径规划研究临近空间和临近空间飞⾏器扑翼微型飞⾏器⾮线性H∞姿态控制飞⾏器虚拟现实仿真研究中国研制成功形似“UFO”的实⽤飞⾏器等⾼超声速飞⾏器的⽓动外形飞⾏器系统级可测试性设计⽅法研究“创新”杯第⼆届全国未来飞⾏器设计⼤赛专业⼆等奖作品(⼆)欧洲第⼀艘“⾃动转移飞⾏器”发射升空等完美世界飞⾏器再绎⾃由新梦想私享者的飞⾏器临近空间飞⾏器的种类及军事应⽤⽔上飞机、地效飞⾏器与冲翼艇辨析⾃主飞⾏器向苍蝇看齐东梦岛——奇奇的飞⾏器电⼦⼲扰对低可观测飞⾏器飞⾏路径规划的影响国内外微型飞⾏器研究现状及技术特点⼟⾖·⽜仔·总统⼭·柑橘·飞⾏器·⼤瀑布美国临近空间飞⾏器技术发展概述从“飞⾏器”谈起的“科学”飞⾏器的“摇篮”新型飞⾏器造艘飞⾏器去参赛⽇本准备进⾏升⼒体再⼊飞⾏器试验昆⾍飞⾏器飞⾏器造型⼤⽐拼飞⾏器的“原动⼒”飞⾏器在直⾓坐标系中定位⽅法研究飞⾏器助推段振动环境分析近空间飞⾏器成为各国近期研究的热点(下)近空间飞⾏器成为各国近期研究的热点(上)飞⾏器的奥秘应⽤于微型飞⾏器阵列天线的⾃适应波束形成器苍蝇飞⾏器正“瘦⾝”训练⾼超声速飞⾏器滑⾏航迹优化飞⾏器RCS计算前置处理中裁剪曲⾯剖分算法⾼超声速飞⾏器BTT⾮线性控制器设计与仿真基于MAS的空天飞⾏器⾃主控制系统设计⾼超⾳速飞⾏器头罩⽓动热流场数值模拟微型仿⽣扑翼飞⾏器的尺度效应分析美国航宇局探索体系和“机组探索飞⾏器”问答追逐飞⾏器的龟壳911TurBo不⼀样的新兵:美国研制“临近空间”飞⾏器“⼩鹰”号地效飞⾏器飞⾏器发动机的分类及⼯作原理⼀种翼⾝融合体飞⾏器外形的RCS计算与实验发明载⼈飞⾏器的应是中国⼈某RLV飞⾏器投放轨迹的设计与分析⾼空⾼速⽆⼈飞⾏器热控制系统设计碟形飞⾏器发展现状及其关键技术世爵:陆地飞⾏器⾼能激光武器的毁伤机理及飞⾏器防御途径分析美国的机组探测飞⾏器计划基于遗传算法的飞⾏器追踪拦截模糊导引律优化设计⽆⼈飞⾏器⾃主着舰实时场景的仿真实现基于OpenGL的飞⾏器超低空追击/拦截三维可视化仿真系统“地⾯飞⾏器”飞⾏器控制软件的Statechart原型及其验证跨⼤⽓层飞⾏器爬升段纵向飞⾏控制律和制导律设计地效飞⾏器的海战应⽤地效飞⾏器何以东⼭再起飞⾏器多学科设计优化软件系统防晕飞⾏器微型飞⾏器的微⼩摄像与⽆线传输系统旋翼式微型飞⾏器升⼒系统设计基于Matlab的飞⾏器系统动态特性分析飞⾏器结构特征提取与识别飞⾏器动态下俯过程中的负阻⼒现象激光推进轻型飞⾏器——⼤⽓模式和激光烧蚀推进相结合⾃⼰做个飞⾏器可重复使⽤空间飞⾏器的飞⾏控制飞⾏器RCS预估计算前置处理的曲⾯元⽅法基于视频图像的微型飞⾏器飞⾏⾼度提取⽅法各具特⾊的新动⼒飞⾏器微型飞⾏器新型极化电磁驱动舵机的研究飞⾏器结构模型的塑性动⼒响应和失效研究超⼩型固定翼飞⾏器飞控系统研究数据库中的知识发现在飞⾏器故障诊断中的应⽤登⽉飞⾏器软着陆轨道的遗传算法优化飞⾏器动⼒学虚拟样机技术研究微型飞⾏器螺旋桨的⽓动优化设计我所研究的磁悬浮环形飞⾏器基于GIS的⽆⼈飞⾏器路径规划航空百年:“601所杯”未来飞⾏器设计⼤赛启事新闻⾥的飞⾏器:RJ-100型客机“熊蜂-1T“遥控飞⾏器“熊蜂-1T”遥控飞⾏器⼩型观测系统新型飞⾏器V-44问世飞⾏器座舱联想形形⾊⾊的新飞⾏器阿列克谢耶夫与他的地效飞⾏器神奇的地效飞⾏器空间作战飞⾏器。
一种新型六旋翼飞行器的设计
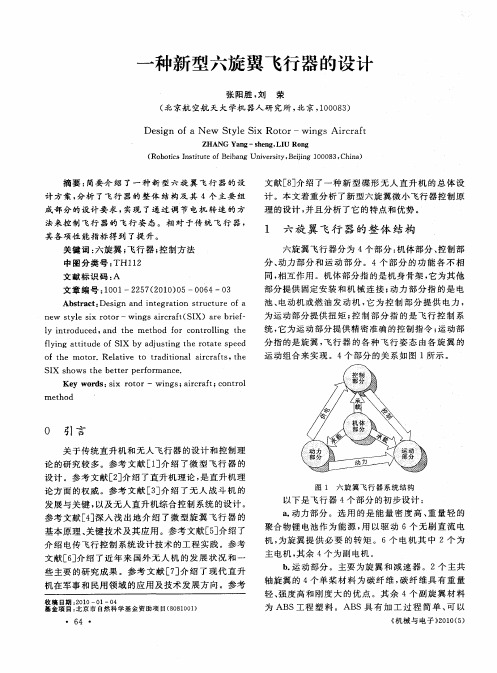
0 引 言
关 于传统 直 升机 和无人 飞行 器 的设计 和控 制理
论 的研 究较 多 。参考 文献 [ ] 绍 了微 型 飞行 器 的 1介
设计 。参考 文献 E ] 绍 了直升机 理论 , 直升 机理 2介 是 论 方面 的权威 。参考 文献 [ ] 绍 了无 人 战 斗机 的 3介 发 展与 关键 , 以及 无人 直 升机综合 控 制系统 的设 计 。 参 考文 献 [] 入浅 出地 介 绍 了微 型 旋 翼 飞 行器 的 4深
文 献[ ] 6 介绍 了近 年来 国外 无 人机 的发 展 状 况 和一
聚合 物锂 电池作 为 能 源 , 以驱 动 6个 无 刷 直流 电 用 机, 为旋翼 提 供 必 要 的转 矩 。6个 电机 其 中 2个 为
主 电机 , 其余 4个为 副 电机 。 b 运 动部 分 。主要 为旋 翼 和减 速 器 。2个 主共 .
Ab t a t De i nd i e a i n s r t e o sr c : sgn a nt gr to t uc ur fa
n w t l i o o e s y e sx r t r—wi g ic a t S X) a e b i f n sarr f( I r re -
fyn tiu eo I y a j si g t er t t p e li ga tt d fS X b d u t h o a es e d n
o he m o o .Re a i e t ta to l ic a t ft tr l tv O r dii na ar r fs,t he SI s owst e be t rpe f ma e X h h te ror nc . Ke r s: i r t r— wi gs aic a t o r l y wo d sx o o n ; r r f ;c nt o m eh t od
自写-六旋翼无人机发明实用新型专利撰写范例汇总

说明书摘要本实用新型公开一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接。
本实用新型通过控制器和飞行器的相互配合工作,在一定程度上提高了六旋翼飞行系统的运行效率,为其它更多功能的拓展提供了基础。
相比其它的飞行系统,此系统结构更简单,更容易实现,降低了普通用户对飞行器的控制难度。
图1权利要求书1.一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,其特征在于,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接,所述飞行器的无刷电机与电机调速装置电连接。
2.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述位置锁定装置包括陀螺仪、加速度计和全球卫星定位系统(GPS)电路模块。
3.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量装置包括陀螺仪、加速度计、电子磁场计和温度传感器。
4.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量装置为三轴加速度陀螺仪传感器。
5.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述定高装置包括超声波传感器和气压计传感器。
说明书一种六旋翼飞行系统技术领域本实用新型涉及飞行器控制技术领域,具体涉及一种六旋翼飞行系统。
背景技术在二十世纪初就出现的多旋翼飞行器拥有体积小、结构紧凑和可垂直起降的特点,被广泛应用于军事、警备和工农业生产等领域。
六旋翼飞行器建模及位置跟踪控制

六旋翼飞行器建模及位置跟踪控制王伟;邱启明【摘要】为实现六旋翼的位置跟踪与控制功能,对六旋翼飞行器的数学模型进行了分析,通过线性化得到了其简单数学模型。
在简化的数学模型基础之上设计了基于PID(比例-积分-微分控制器)控制算法的姿态控制器和位置控制器,控制器仿真结果表明位置跟踪误差小于2%。
飞行实验中飞行器准确追踪给定的姿态角精度大于80%,飞行器性能稳定,实现方法合理。
%In order to accomplish control functions,a simple mathematical model was achieved after the model of six-rotor unmanned aerial( UAVs) vehicle was analyzed and linearnized. Attitude controller and position controller was designed based on PID ( Proportional-Integral-Derivative ) control algorithm and the simply mathematical mentioned above. The results of simulation putted on position controller showed that position error is less than two percent. The degree of accuracy on the fact that the reference input was correctly traced by UAVs is greater than eighty percent during the flight test. The performance is stable,and the implementation method is reasonable.【期刊名称】《电子器件》【年(卷),期】2014(000)003【总页数】7页(P507-513)【关键词】控制工程;位置跟踪;PID控制;数学建模;姿态控制【作者】王伟;邱启明【作者单位】南京信息工程大学信息与控制学院,南京210044;南京信息工程大学信息与控制学院,南京210044【正文语种】中文【中图分类】V249近些年来,无人机(Unmanned Aerial Vehicle)在救援、安保、巡查和航拍等方面的广泛应用已引起人们的广泛关注,这些应用对无人机的稳定悬浮、操作灵活和安全等性能提出了极大挑战。
六旋翼物流无人机造型设计方案

六旋翼物流无人机造型设计方案
六旋翼物流无人机的设计方案可以考虑以下几个方面:
1. 六旋翼结构:可以采用具有良好稳定性和操控性的六旋翼结构,以确保无人机在各种气象条件下都能平稳飞行。
2. 机身材质:选择轻量化的材质,如碳纤维复合材料,以提高无人机的载重能力和飞行效率。
3. 机身外观设计:可以采用流线型外观设计,减少飞行时的空气阻力,提高飞行速度和稳定性。
4. 机身尺寸:根据物流需求,设计合适尺寸的无人机,以容纳不同大小的货物。
5. 抗风能力:考虑到物流无人机需要在各种复杂气象条件下飞行,设计方案应考虑提高无人机的抗风能力,以保证飞行的稳定性和安全性。
6. 动力系统:选择高效的电动动力系统,以提供足够的动力和长飞行时间。
7. 载重系统:设计合理的载重系统,包括承载货物的舱室、固定装置和安全锁定装置,以保证货物在飞行过程中的安全性。
8. 操控系统:配置先进的操控系统,包括自动驾驶和遥控操控功能,以确保无人机可以安全地飞行和交付货物。
总之,六旋翼物流无人机的设计方案应兼顾飞行性能、载重能力、稳定性和安全性,以满足物流需求并提高无人机的工作效率。
基于UWB室内定位六旋翼无人机的设计

基于UWB室内定位六旋翼无人机的设计杨森;马添麒【摘要】飞行控制系统主控芯片我们采用的是STM32系列的STM32F103C8T6,并集成了室内定位系统所需的超宽带定位模块DWM1000,MPU6050(六轴陀螺仪),MS5611(气压传感器),HMC5883L(电子罗盘)等多个传感器模块,采集并分析各个传感器的数据,分析整合数据形成各个功能模块,并根据传感器检测的数据处理生成驱动电机的PWM控制信号,采用PID串级调速实现四旋翼飞行器平稳起飞以及姿态调整.【期刊名称】《无线互联科技》【年(卷),期】2018(015)007【总页数】3页(P19-21)【关键词】六旋翼;UWB室内定位;多传感器【作者】杨森;马添麒【作者单位】江苏科技大学电信学院,江苏镇江 210016;江苏科技大学电信学院,江苏镇江 210016【正文语种】中文1 多旋翼无人机技术概述近年来,多旋翼无人机技术,在救援,航拍,农业,侦察等各个民用领域都得到了广泛的关注与研究,应用前景非常可观。
微型多旋翼无人机由于其本身所具备的特殊性,如优秀的低速性能和垂直起降性能、简单紧凑的机械结构、机身小巧便于隐藏和携带、可拓展性强、方便部署与维护等优点,在民用领域得到多方面应用[1]。
相比较于室外,室内由于其空间狭小,障碍物较多,高度低等问题,往往对于飞行器的低速性能有着较高的要求,对于其本身的大小有极大的限制,因此在本设计中多旋翼无人机采用六旋翼为代表,为了有效突出六轴的可控性,本文在飞行控制器设计中加入了超宽带(Ultra Wide Band,UWB)室内定位系统[2],将室内相对坐标位置与陀螺仪所采集的三轴角速度、磁力计采集的三轴磁力信息、加速度传感器采集的三轴加速度以及气压计所采集的高度信息相融合,并采用卡尔曼滤波算法[2],此算法不仅可以有效地减弱陀螺仪自身的温漂现象、零漂现象[3],还可以使得多传感器之间优势互补,进一步提高六旋翼飞行控制系统的控制精度。
一种新型多旋翼飞行器的建模与反演控制

由假设 ( )可 知 , 行 器 的惯 性矩 阵可 表示 为 2 飞 如 下对 角矩 阵 :
r 0 0]
飞行器的空间运动分为两个部分 : 质心运动和 绕着质心 的运 动. 定义质心运 动 的线 速度为 =
( , , ; ) 绕质心运 动 的角速度 为 力 = ( ,,) Pqr
第3 0卷 第 4期
21 年 0 月 02 7
佳 木 斯 大 学 学 报 ( 自 然 科 学 版 ) Ju a f i u i nvr t N trl c neE io ) o r l a s U i sy( a a S i c dt n n oJ m e i u e i
第 4期
潘 骏 , : 等 一种新型多旋翼飞行器的建模与反演控帝 I
1 ;-一g 。+ z
51 4
() 3
O B的长 度 ; 为 C ,M,M 的长度 ; 为 O 2 N, A D f 3 N,
其 中 m为 飞行器 的重 量 , 重力 加速度 , =( , g为 0 ( , ) = ( ,, T由机 体坐 标 到地 面坐 标 ,, , , 0 . O 1 表示 在 地 面坐 标 系 中 的单 位 向 量 , 为旋 翼 ,) 提 供 的总 的升力 .
易导 致敏 感 元 件 误 差 增 加 、 控 计 算 机 失 效 等 故 飞 障, 降低 了系统 的可 靠 性 . ) 荷 以及 抗 风 能 力 较 3载
差.
基于上述分析 , 本文针对 目 前多旋翼飞行器存 在的不足之处 , 提出一种外形 布局新颖 、 内部结构 简洁、 具有硬件冗余且易于工程实现的新型多旋翼 飞行 器 ( 结构 如 图 1所 示 ) 随 后 , 飞 行器 的物 其 , 从 理 特性角 度 出发 , 其 建 立 了 动 力 学 和运 动 学 模 对 型, 并设 计 了基 于反 演控 制策 略 的飞行 器 姿态控 制 器 和基于 P D的位 置控 制 器 . 最后 通 过 仿 真 验证 实 验 , 证所 提控制 策 略 的正确 性 和有效 性 . 验
消防无人机使用说明书

RB-186六旋翼无人机飞行系统操作说明书目录I.系统简介: (2)II.飞行参数 (2)III.无人飞行器系统组成 (3)A.系统组成 (3)B.飞行系统 (3)C.地面控制系统 (4)D.图传系统 (5)1.数字微波传输系统 (5)IV.操作说明 (5)A.飞行器的安装 (1)1.飞行器组件 (1)2.主机图示 (1)3.电池图示 (2)4.机臂安装 (2)5.电池安装 (3)B.遥控器的操作 (5)C.地面站的操作 (5)1.面板示意图 (5)2.4G转发系统 (7)I.系统简介:RB-186型六旋翼无人飞行器系统是一款多功能便携式无人飞行器。
RB-186机身接狗均由碳纤维材料构成。
机架、上盖、支臂、起落架、电机架等皆为轻强结构设计。
其中六个支臂采用直连式结构,飞行姿态更加稳定。
带载起飞重量小于18公斤,最大外形尺寸小于20厘米。
采用插臂式结构,展开时间迅速,通电等候GPS卫星定位几分钟即可升空飞行。
实为一款使用性极强的六旋翼飞行器。
系统还可实现数字微波图像传输及4G图像转发功能,能够将无人机拍摄的图像实时回传到千里之外的指挥中心。
II.飞行参数III.无人飞行器系统组成A.系统组成RB-186有着非常完备的系统配置。
包含:※飞行系统※地面控制系统※图传系统B.飞行系统※动力系统简介动力系统是由旋翼、电机、电速调器、电池组等组成、采用了六支18英寸旋翼,旋翼由碳纤维材料构造,并采用湿法糊制固化成型,轻质而高强度。
旋翼设计经由无数次测试和优化改进,气动性能符合空气动力学原理。
配合外转子无刷低速高效电机和特制的400Hz电子调速器,可在各种复杂的环境下安全飞行。
动力电池组采用了6S1P1封装方式,内置高能量锂聚合物电池。
该电池组除给动力系统提供强劲电源外,同时,还利用DC/DC直流转换技术给自动驾驶仪、陀螺稳定云台、机载设备、测控链路设备、图传设备等提供电源。
※飞控系统飞控系统安装有三轴电子陀螺、三轴加速计、高精度数字气压计、精密电子罗盘、GPS天线及模块等各种传感器。
六轴旋翼碟形飞行器控制系统设计
A src : h xai rt u e a e t c fi it d cdi ti p p r w i o ee ys o r adfe a ya j — b t t T e i x o s c r h p d o rr t s n o u e s a , h h s w r b xm t s n i s t b u a s — so ra s r o a r nh e c ip d i o l st e d s
1 设计 和功 能
1 1控制 系统设计 . 传统的双轴或串列式 直升机 、 同轴直升机 等都是通过控 制舵机来改变螺旋 桨的浆距 角来 实现 直升机 的姿态 和位置
中图分 类号 :29 1T 318 V 4  ̄;P9.
飞行控制乐统
A R单片祝 。肼 射 V
文 章编 号 : 0  ̄68 ( 1 )4 05 0 1 2- 86 2 0 o — 06— 3 0 0
文献 标识码 : A
De i n o i h n r lS se o i -x s Ro o a c r S a e t r r f sg fFl t Co t o y t m f r a S x a i t r S u e h p d Ro o c a t g
s n rl n r y a d t eh r w r f ih o t lsse i d s n a e n s gec i i rc n rl rA ME A8 3 .B c u eo — i e p ei ai n ad a eo g tc n r y tm s e i e b s o i l— hp m co o t l T G 5 5 e a s f n gd mi l h l f o gd d n oe i
一种警用可折叠六旋翼飞行器设计
S c 科 i e n c e & 技 T e c h 视 n o l o g y 界 V i s i o n
一
种警用可折叠六旋翼飞行器设计
宋光辉 ( 中国人 民解 放军 1 0 0 8 6 )
【 摘 要】 针对 固定翼飞行 器尺寸较 大、 不能悬停和普通四旋翼飞行器载重轻、 携行不方便 的问题 。 设计 出一种警 用可折 叠六旋翼 飞行 器 。 分析飞行 器结构原理和对六旋翼飞行 器进行虚 拟建模 , 并设计 出可折叠机构 , 使其达到单兵携行的 目的 , 最后对飞行姿 态进行解算 , 为控 制方
2 . 4 G H Z的接 收机构 成 , 工作 电压为 5 V, 由电池进行供电 , 负责飞行指 令 的接收 。 ( 3 ) 动力 系统 . 选用 3 2 0 K V的 S u n n y S k y X 4 1 1 2 S盘式 无刷电机配 A P C 1 4 " 4 7 螺旋桨 、 好赢 6 S 4 0 A电子调速器和 2 2 . 2 V 1 0 0 0 0 m A h 航模 电池 . 飞机 的续航能力大约 2 0 分钟 。 单个电机拉力 与电流之 间的关系 如 图 3所示 , 通过 的最 大电流为 1 3 . 6 A, 最大提 升力 为 2 0 6 0 g , 可 以估 算 出飞行器 的最大提升为 1 2 . 3 6 k g .为了使飞机能有足够动力进行姿 态调整 , 通常 留有 4 0 %的冗余 。 飞行器的整体提升力大约 8 k g. 机身整 体重量设定为 4 , 所 以飞行器净载荷不能超过 4 k g , 否则飞行时会产
法 的提 出提 供 理 论依 据 。
【 关键词 】 六旋翼 ; 虚拟建模 ; 姿 态结算 ; 控制方法
0 引言
一种可折叠六旋翼飞行器[实用新型专利]
![一种可折叠六旋翼飞行器[实用新型专利]](https://img.taocdn.com/s3/m/8b343e9cf46527d3250ce0c7.png)
专利名称:一种可折叠六旋翼飞行器
专利类型:实用新型专利
发明人:李杰,申强,徐兴建,杨成伟,王征,刘云辉,叶波波,孙煜杰,熊婧,杨亚超
申请号:CN201620030215.2
申请日:20160113
公开号:CN205469799U
公开日:
20160817
专利内容由知识产权出版社提供
摘要:本实用新型属于一种无人飞行器,特别涉及一种微小型旋翼飞行器。
其技术方案是:一种可折叠六旋翼飞行器,包括:两个Y型动力模块(1),两个I型单支臂(3)和飞行器机身(5);所述Y型动力模块(1)通过Y型折叠组件(2)、所述I型单支臂(3)通过单支臂折叠组件(4)连接至所述飞行器机身(5);本实用新型折叠后体积较展开时减小54%,有效地解决了多轴多旋翼飞行器不便于携带运输的问题,并且结构简单,选用成型材料,可有效降低飞行器自身成本。
申请人:北京理工大学
地址:100081 北京市海淀区中关村南大街5号
国籍:CN
代理机构:北京理工大学专利中心
更多信息请下载全文后查看。
基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术研究

基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术研究随着无人机技术的迅速发展,六旋翼飞行器作为其中一种重要的类型,具有广泛的应用前景。
然而,六旋翼飞行器的飞行控制问题一直是研究的热点之一。
为了提高六旋翼飞行器的飞行性能和稳定性,研究人员提出了各种各样的控制方法。
本文将重点研究基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术。
动态逆控制是一种常用的控制方法,它通过将系统的非线性动力学模型转化为一个线性的模型来实现控制。
然而,由于六旋翼飞行器具有高度非线性和复杂的动力学特性,传统的动态逆控制方法往往难以满足其控制要求。
为了解决这个问题,本文提出了一种自适应动态逆控制方法。
首先,利用Pixhawk飞控板采集的传感器数据,获取六旋翼飞行器的状态信息。
然后,利用这些数据构建一个精确的非线性动力学模型,将其作为逆控制器的输入。
接着,通过自适应学习算法对逆控制器进行参数调整和优化,以实现对六旋翼飞行器的精确控制。
最后,利用实验验证了该方法的有效性。
实验结果表明,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术具有明显的优势。
与传统的动态逆控制方法相比,该方法能够更准确地模拟六旋翼飞行器的非线性动力学特性,并能够在不同工况下实现精确控制。
此外,该方法还具有较强的鲁棒性和适应性,能够有效应对飞行器系统参数变化和外部干扰。
综上所述,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术具有广泛的应用前景。
它为六旋翼飞行器的飞行控制问题提供了一种新的解决方案,能够提高飞行性能和稳定性,为无人机技术的发展做出贡献。
然而,该方法仍然存在一些问题和挑战,需要进一步的研究和改进。
相信随着技术的不断发展和创新,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术将会得到更广泛的应用和推广。
小型六旋翼飞行器的气动布局优化设计与试验研究

小型六旋翼飞行器的气动布局优化设计与试验研究小型六旋翼飞行器的气动布局优化设计与试验研究摘要:本论文针对小型六旋翼飞行器在不同飞行状态下的气动特性进行了研究和优化设计。
首先对六旋翼的原理和气动布局进行了详细介绍,并建立了数学模型,分析了飞行器在不同姿态下的飞行动力学特性。
然后,通过对扭矩和升力等气动参数进行计算和实验测量,确定了合适的螺旋桨尺寸和转速,提高了飞行器的升力和飞行稳定性,降低了功耗和振动。
最后,对设计出的小型六旋翼进行了飞行试验和数据分析,验证了优化设计的有效性和可行性。
本论文的研究成果对小型六旋翼飞行器的改进和应用具有重要的参考和借鉴作用。
关键词:小型六旋翼;气动布局;优化设计;飞行试验;数据分析。
一、引言小型六旋翼飞行器因其具有灵活性、可控性和适应性等优点,被广泛应用于航拍、监测和探测等领域。
然而,由于其结构复杂、气动性能受限等问题,目前仍存在一些难点和挑战。
因此,在设计和制造小型六旋翼飞行器时,需要进行深入的研究和优化,以提高其飞行性能和可靠性。
本论文旨在研究小型六旋翼飞行器的气动布局优化设计和试验,主要包括以下内容:首先介绍小型六旋翼的原理和气动布局,建立数学模型;然后对飞行器在不同姿态下的飞行动力学特性进行分析;接着,通过计算和实验测量确定合适的螺旋桨尺寸和转速,提高升力和飞行稳定性,降低功耗和振动;最后进行飞行试验和数据分析,验证优化设计的有效性和可行性。
二、六旋翼的原理和气动布局小型六旋翼飞行器由六个单轴马达和螺旋桨、电路、机架等组成。
如图1所示,其中1~6为六个单轴马达和螺旋桨,7为机架,8为电路板,9为飞行控制器。
六个单轴马达和螺旋桨在不同姿态下工作,产生的升力和扭矩叠加可以实现飞行器的平稳升降、旋转和移动等功能。
图1 小型六旋翼飞行器气动布局示意图为了实现小型六旋翼飞行器的稳定和灵活性,需要对其气动布局进行优化设计。
气动布局是指螺旋桨的数量、尺寸和旋转方向等因素的选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种新型六旋翼飞行器的设计张阳胜,刘 荣(北京航空航天大学机器人研究所,北京,100083)Design of a New Style Six Rotor -wings AircraftZHANG Yang -sheng ,L IU R ong(Robotics Institute of Beihang University ,Beijing 100083,China ) 摘要:简要介绍了一种新型六旋翼飞行器的设计方案,分析了飞行器的整体结构及其4个主要组成部分的设计要求,实现了通过调节电机转速的方法来控制飞行器的飞行姿态.相对于传统飞行器,其各项性能指标得到了提升.关键词:六旋翼;飞行器;控制方法中图分类号:T H112文献标识码:A文章编号:1001-2257(2010)05-0064-03收稿日期:2010-01-04基金项目:北京市自然科学基金资助项目(8081001)Abstract :Design and integration st ruct ure of a new style six rotor -wings aircraft (SIX )are brief 2ly int roduced ,and t he met hod for cont rolling t he flying attit ude of SIX by adjusting t he rotate speed of t he motor.Relative to t raditional aircraft s ,t he SIX shows t he better performance.K ey w ords :six rotor -wings ;aircraft ;cont rol met hod0 引言关于传统直升机和无人飞行器的设计和控制理论的研究较多.参考文献[1]介绍了微型飞行器的设计.参考文献[2]介绍了直升机理论,是直升机理论方面的权威.参考文献[3]介绍了无人战斗机的发展与关键,以及无人直升机综合控制系统的设计.参考文献[4]深入浅出地介绍了微型旋翼飞行器的基本原理、关键技术及其应用.参考文献[5]介绍了介绍电传飞行控制系统设计技术的工程实践.参考文献[6]介绍了近年来国外无人机的发展状况和一些主要的研究成果.参考文献[7]介绍了现代直升机在军事和民用领域的应用及技术发展方向.参考文献[8]介绍了一种新型碟形无人直升机的总体设计.本文着重分析了新型六旋翼微小飞行器控制原理的设计,并且分析了它的特点和优势.1 六旋翼飞行器的整体结构六旋翼飞行器分为4个部分:机体部分、控制部分、动力部分和运动部分.4个部分的功能各不相同,相互作用.机体部分指的是机身骨架,它为其他部分提供固定安装和机械连接;动力部分指的是电池、电动机或燃油发动机,它为控制部分提供电力,为运动部分提供扭矩;控制部分指的是飞行控制系统,它为运动部分提供精密准确的控制指令;运动部分指的是旋翼,飞行器的各种飞行姿态由各旋翼的运动组合来实现.4个部分的关系如图1所示.图1 六旋翼飞行器系统结构以下是飞行器4个部分的初步设计:a.动力部分.选用的是能量密度高、重量轻的聚合物锂电池作为能源,用以驱动6个无刷直流电机,为旋翼提供必要的转矩.6个电机其中2个为主电机,其余4个为副电机.b.运动部分.主要为旋翼和减速器.2个主共轴旋翼的4个单桨材料为碳纤维,碳纤维具有重量轻、强度高和刚度大的优点.其余4个副旋翼材料为ABS 工程塑料.ABS 具有加工过程简单、可以获得・46・1机械与电子22010(5)几乎任意尺寸的厚度和良好的热塑性等优点.主共轴旋翼采用减速齿轮组;副旋翼尺寸较小,可以直接用电机驱动,不用另外的减速机构.c.机体部分.为动力部分和运动部分提供必要的支撑并确定整个飞行器的机体外形.除连接标准件外,机体材料选用碳纤维、玻璃纤维和尼龙等比重小的材料,以减轻飞行器的重量.d.控制部分.负责飞行的稳定性控制,实现飞行器起飞、停止、转向的遥控控制或使微小旋翼飞行器按照预先设计的策略飞行.2 控制模式分析六旋翼飞行器的原型图如图2所示.中间为2个共轴主旋翼,2个主旋翼旋转方向相反;外侧4个为副旋翼,相邻2个旋翼旋转方向两两相反,2个顺时针旋转,2个逆时针旋转.其整机升力主要由2个共轴旋翼提供,飞行器的姿态调整由4个副旋翼控制.六旋翼飞行器可以通过调节各电机的转速来改变牵引力的大小,实现飞行姿态与航向的控制.六旋翼飞行器各种飞行姿态的控制如图3所示.图2 六旋翼飞行器的原型图图3 六旋翼飞行器各种飞行姿态的控制在图3b 中,当所有旋翼产生的升力等于飞行器自身的重力时,飞行器保持悬停状态.飞行器的升降运动有2个主共轴旋翼决定.在图3a 中,当2个共轴主旋翼旋的转速共同减小,所有旋翼产生的升力小于飞行器自身的重力时,飞行器下降.在图3c 中,当2个共轴主旋翼旋的转速共同增大,所有旋翼产生的升力大于飞行器自身的重力时,飞行器升高.飞行器要偏转航向,需要所有旋翼产生的反扭矩不平衡.六旋翼飞行器的偏航由2个共轴主旋翼决定.2个共轴主旋翼旋转方向相反,平衡所有旋翼产生的反扭矩.在图3e 中,当2个共轴主旋翼平衡了所有旋翼产生的反扭矩时,飞行器无偏航.在图3d 中,当顺时针旋转旋翼转速降低,逆时针旋转旋翼转速增大,且2个共轴主旋翼所产生的升力之和保持不变时,飞行器顺时针偏航.在图3f 中,当逆时针旋转旋翼转速降低,顺时针旋转旋翼转速增大,且2个共轴主旋翼所产生的升力之和保持不变时,飞行器逆时针偏航.飞行器水平移动由4个副旋翼决定.由于所有旋翼无法产生水平方向上的牵引力,所以飞行器需要产生倾斜,由升力在水平方向上的分力推动飞行器水平移动.在图3g 和图3h 中,当一侧的2个副旋翼转速增大,产生的升力增大,而另一侧的2个副旋翼转速降低,产生的升力降低时,飞行器的姿态产生倾斜,飞行器朝姿态降低的一侧水平移动.当转速共同变化发生在前后两侧,飞行器产生姿态发生俯仰,并产生前后运动.当转速共同变化发生在左右两侧,飞行器产生姿态发生翻滚,并产生左右运动.由于飞行器任意一个侧面的两个副旋翼的旋转方向都是相反的.因此,同侧副旋翼转速共同增大和降低,不会引起反扭矩的平衡.综上所述,六旋翼飞行器实现了空间6个自由度(分别沿3个坐标轴作平移和旋转运动)的运动.在实际使用情况下,有用的主要运动为沿3个坐标轴作平移运动和绕垂直轴的旋转运动.俯仰运动和翻滚运动为水平运动的诱导运动.3 六旋翼飞行器的优点六旋翼飞行器相对于传统直升机(单桨带尾桨直升机或共轴直升机),以及目前流行的四旋翼飞行器有以下优点.六旋翼飞行器具有相当好的自稳定性.抗侧风・56・1机械与电子22010(5)示意图如图4所示.在图4中,六旋翼飞行器受到侧风的影响.由于六旋翼飞行器的迎侧风面位于飞行器的下部,因此侧风会产生一个绕主旋翼中心的倾斜力矩,在此力矩的作用下,飞行器的下部会沿顺风方向偏移,从而使机体朝侧风方向倾斜.此时,旋翼升力在水平方向上产生分力,此分力方向与侧风方向相反,削弱侧风对飞行器的影响,具有一定的抗风性能.图4 六旋翼飞行器抗侧风示意图地球上最好的平衡仪莫过于地球引力,靠自身的重力平衡具有很高的可靠性.六旋翼飞行器回复示意图如图5所示.在图5中,六旋翼飞行器因某个原因发生倾侧.飞行器的重力在垂直于主旋翼轴方向上产生一个分力(回复力),由于六旋翼飞行器的重心设计靠下,与主旋翼中心的距离较大,所以此分力产生一个绕主旋翼中心较大的力矩(回复力矩),此力矩会帮助飞行器回复到平衡姿态.因此,六旋翼飞行器具有很好的自平衡性.图5 六旋翼飞行器回复示意图六旋翼飞行器还具有大承载能力.显而易见,在旋翼面积相同的情况下,共轴双旋翼所产生的升力要大于单旋翼.对于小型飞行器来说,在不增大旋翼尺寸的前提下,要增大升力从而实现承载能力增大,是一件非常重要的事.比现有的四桨飞行器能够承受更大的负载.传统的直升机垂直飞行、悬停、前飞、后飞和侧飞主要靠旋翼和尾桨(单旋翼直升机)或两副旋翼(双旋翼直升机)的各种不同状态组合来实现.因此旋翼的操纵机构比较复杂,成本较高.六旋翼飞行器的操控机构相对于传统共轴直升机来说要简易许多.六旋翼飞行器的2个共轴主旋翼都为固定螺距,减少了变螺距机构;由于机体倾斜由副旋翼控制,所以也减少了桨盘倾斜机构.运动连接机构数量的减少大大提高了飞行器的飞行可靠性.4 结束语六旋翼飞行器具有体积小、重量轻、承载大和稳定性高等特点;控制原理简单、易于实现,具有一定的实用性、经济性.从结构上看,六旋翼飞行器是共轴直升机和四桨飞行器的组合,但它并不是简单的拼凑,而是将两者的优点进行优化组合.本文只是对六旋翼飞行器整体结构、控制原理、特点优势进行了初步探讨.有待进一步详细系统的分析.参考文献:[1] McMicheal J M ,Francis M S.Micro air vehicles -to 2ward a new dimension in flight.DARPA/T TO Report [R ].US ,1997.[2] Johnson W ,Helicopter Theory[M ].Princeton Univer 2sity Press ,1980.[3] 宋子善,沈为群.无人直升机飞行综合控制系统设计[J ].北京航空航天大学学报,1999,25,(3):280-283.[4] 张 庆,程维明.微型旋翼飞行器飞行控制系统设计[J ].光学精密工程,2001,9(6):557-560.[5] 张明廉.飞行控制系统[M ].北京:航空工业出版社,1993.[6] 国外无人机大全编写组.国外无人机大全[M ].北京:航空工业出版社,1994.[7] 裕 武,温清澄,等.现代直升机应用及发展[M ].北京:航空工业出版社,2000.[8] 吴 剑.碟形无人直升机总体设计技术研究[D ].南京:南京航空航天大学,2004.作者简介:张阳胜 (1981-),男,湖南衡南人,硕士研究生,研究方向为先进机器人技术;刘 荣 (1968-),男,重庆人,教授,研究方向为机器人技术及微机电系统.・66・1机械与电子22010(5)。