控制对象操作手册
艾默生DELTAV___控制系统操作手册

Copyrighted Material / Duplication Prohibited
2-
强强调调重重点点::面板和细节窗口的功能。 演演示示::在图形中选择各种不同的对象,演示不同的面板和细节显示窗口。您也可演示在从报警栏中选择某个模块时显示的面板
DeltaV Operate - 弹出窗口 窗口。
EMERSON Process Management
Copyrighted Material / Duplication Prohibited
2-
演演示示::如果您的学员不熟悉 Windows 环境,您可能需要演示最小化、最大化、恢复和退出按钮的功能。
附附加加信信息息::标题栏是否显示取决于操作员工作站的设置方式。
Copyrighted Material / Duplication Prohibited
2-
管理过程报警
EMERSON Process Management
Copyrighted Material / Duplication Prohibited
2-
管理硬件报警
单击 DeltaV 节点状态按钮可以打开下图所示的节点状态画面。这些图标显示了报警的 状态。闪烁的图标表示该报警状态尚未被确认。最高级别报警的节点名称将被 显示。如果正在运行批量操作界面 ,则节点名称不可见。
退 出 DeltaV 操作界面
打印当前主画面至默认打印机
打开所输入模块的仪表面板。当前主画面内不包括此模块时,可 通过此按钮访问。 打开所输入模块的详细信息窗口。无需首先打开面板即可快速访 问详细信息窗口。 可通过组态打开画面目录,允许操作员直接选择所需查看的画面。
EMERSON Process Management
冲床控制系统操作手册
冲床控制系统操作手册
一、操作前准备
1. 检查电源是否正常,确保电源插头插入插座中,且电源开关处于关闭状态。
2. 检查冲床设备周围的环境,确保工作区域安全,没有杂物和人员。
3. 确认冲床的模具安装正确,没有松动或损坏。
4. 检查冲床的控制系统,确保控制面板上的按钮、开关等正常。
二、启动冲床控制系统
1. 打开电源开关,等待控制系统启动。
2. 在控制面板上按下“启动”按钮,启动冲床。
3. 观察冲床的运行状态,确保其正常工作。
三、操作步骤
1. 根据生产需要,选择合适的模具和冲压方式。
2. 在控制面板上输入相应的参数,如冲压次数、压力等。
3. 按下“开始”按钮,启动冲压过程。
4. 在冲压过程中,观察冲床的运行状态,确保其正常工作。
5. 完成冲压后,按下“停止”按钮,停止冲床。
6. 将冲压好的产品取下,并清理模具和冲床。
四、注意事项
1. 在操作过程中,严禁将手或身体其他部位伸入冲床工作区域。
2. 定期检查和维护冲床设备,确保其正常运行。
3. 在使用过程中,如发现异常情况,应立即停止工作,并及时报告维修人员。
4. 保持工作区域的整洁和安全,防止意外事故的发生。
操作手册模板
操作手册模板操作手册模板标题:操作手册目录1. 介绍…………………………………………………………………………………1.1. 目的………………………………………………………………………1.2. 读者对象…………………………………………………………………1.3. 版本控制…………………………………………………………………1.4. 术语定义…………………………………………………………………2. 安装和设置…………………………………………………………………………2.1. 系统要求…………………………………………………………………2.2. 安装步骤…………………………………………………………………2.3. 配置说明…………………………………………………………………2.4. 常见问题解答…………………………………………………………3. 功能介绍…………………………………………………………………………3.1. 主要功能…………………………………………………………………3.2. 使用情境…………………………………………………………………3.3. 注意事项…………………………………………………………………4. 操作说明…………………………………………………………………………4.1. 界面介绍…………………………………………………………………4.2. 操作步骤…………………………………………………………………4.3. 常见问题解答…………………………………………………………5. 故障排除…………………………………………………………………………5.1. 常见问题解答……………………………………………………………5.2. 联系支持团队……………………………………………………………6. 常用快捷键和命令………………………………………………………………6.1. 快捷键表…………………………………………………………………6.2. 命令列表…………………………………………………………………7. 更新历史…………………………………………………………………………7.1. 版本号、日期和作者……………………………………………………7.2. 更新内容…………………………………………………………………1. 介绍本操作手册提供了关于产品的完整指南,旨在帮助读者轻松安装、使用和维护产品。
浙大中控国产DCS操作手册(通用)
SUPCON ECS-700 VisualField系统软件实时监控软件使用手册第一章:控制系统介绍 (3)1.S UPCON ECS-700系统介绍 (3)2.系统网络结构 (3)2.1.系统网络结构概述 (3)3.我公司ECS-700系统配置 (4)第二章:实时监控软件 (5)1.概述 (5)1.1.功能特点 (5)1.2.技术指标 (5)2.启动监控软件 (6)3.监控界面介绍 (8)3.1.监控表头 (8)3.2.监控画面 (10)3.3.报警栏 (27)3.3.1.报警显示 (28)3.3.2.过程报警表 (29)3.3.3.历史报警表 (30)第一章:控制系统介绍1.Supcon ECS-700系统介绍WebFieldTM ECS系统是致力于帮助用户实现生产过程自动化的大规模联合控制系统,继承和发展了中控多年来积累的过程控制经验和核心技术,融合了最新的大规模组网技术、现场总线技术和信息管理技术。
ECS系统的强大功能和高可靠性可以全面帮助企业提升生产效能。
2001年,第一套ECS系统正式在工业现场安装并投入使用。
截止到2008 底为止,中控已经在全世界销售出约1000套ECS系统,广泛地应用于各种石化、化工、电力、冶金、建材、食品等工业领域。
ECS系列控制系统经过多年的实际运行考验,被公认为最成熟的过程控制系统之一。
2.系统网络结构2.1.系统网络结构概述ECS-700系统由控制节点(控制站及配套设备)、操作节点(工程师站、操作员站、主工程师站、数据站、AMS站等)及系统网络(包括过程信息网SOnet、过程控制网SCnet、I/O 总线I/O BUS)等构成。
3.我公司ECS-700系统配置浙江中控提供的系统覆盖范围包括中央控制室、4个现场机柜室,由提供的光纤网络以星形连接方式连接中央控制室和与其关联的各个现场机柜室。
网络图如下:硬件配置如下:l控制器:FCU711-S01控制器作为DCS主控制器,性能强大,可以与多种IO 卡件兼容。
PCS7系统操作手册
PCS7系统操作手册一、引言PCS7系统是西门子公司开发的一种用于工控系统的集散式控制系统。
该系统能够根据用户的需求进行配置,满足不同工业自动化领域的控制、监视、调度和管理要求。
本操作手册主要介绍PCS7系统的基本操作及相关知识,旨在帮助工程师熟悉和掌握PCS7系统的使用。
二、PCS7系统简介1.系统结构:PCS7系统由工程站和运行站组成。
工程站用于工程师进行系统的配置、编程等操作,而运行站用于实时监视和控制生产过程。
2.系统功能:PCS7系统具有数据采集、实时控制、历史数据存储、报警管理、远程监控等功能,可以实现对工业生产过程的全面控制和管理。
3.系统特点:PCS7系统具有模块化、可扩展、可靠性高、故障诊断能力强等特点,适用于各类复杂的工业自动化系统。
三、PCS7系统的基本操作1.系统启动:首先需要启动PCS7系统,并登录系统。
根据分配的权限级别,用户可以进行不同的操作。
2.系统配置:在工程站上进行系统的配置工作,包括硬件配置、设备连接和网络设置等。
通过配置,将物理设备和控制对象与系统进行关联。
3.程序编程:通过工程站上的编程工具,对控制逻辑进行设计和编写。
可以使用逻辑图、语句表等方式编程。
4.仿真调试:在开发阶段,可以使用仿真工具对编写好的控制程序进行仿真调试,以验证程序逻辑的正确性。
5.运行监视:在运行站上,可以监视控制过程的各项参数和状态,包括生产数据、设备状态、报警信息等。
可以通过图形界面进行操作和控制。
6.数据存储和报表生成:PCS7系统可以将历史数据进行存储,并生成相应的日报表、月报表等,以供分析和查询。
7.系统维护:对PCS7系统进行定期的维护工作,包括设备检修、数据备份、系统更新等,以确保系统的稳定和可靠性。
四、PCS7系统常见问题解决方法1.系统无法启动:可能是电源故障、硬件连接问题或系统配置错误导致的。
可以检查电源是否正常、设备连接是否松动以及系统配置是否正确。
2.控制逻辑错误:在编程过程中可能会出现逻辑错误,导致系统无法正常运行。
中控系统操作手册
中控系统操作手册一、简介中控系统是一种用于管理和控制各种设备的集中式控制系统。
它能够集成多种设备,如照明、空调、安防、音视频等,通过统一的控制界面实现对这些设备的集中控制和管理,提高设备的自动化程度和效率。
本操作手册将介绍中控系统的基本操作和功能,帮助用户快速上手和使用该系统。
二、系统登录在使用中控系统之前,首先需要登录系统。
用户可以通过输入用户名和密码登录系统。
若是首次登录系统,需要管理员分配用户名和密码。
三、系统界面1. 概览界面:登录系统后,将进入概览界面。
该界面显示系统的整体运行状态和各个设备的状态。
用户可以通过该界面快速了解系统的整体运行情况。
2. 设备控制界面:系统支持多种设备控制功能,如照明控制、空调控制、安防控制等。
用户可以通过设备控制界面选择具体设备,然后根据需要进行相应的操作。
3. 场景管理界面:系统支持场景管理功能,用户可以创建不同的场景,并将多个设备的控制参数保存到场景中。
在需要时,用户可以通过场景管理界面调用相应场景,以实现多设备联动控制。
4. 定时任务界面:系统支持定时任务功能,用户可以根据需要设置定时任务,让系统在特定时间执行相应操作,如定时调整照明亮度、定时开启空调等。
在定时任务界面,用户可以对已设置的定时任务进行管理和编辑。
四、设备控制中控系统支持多种设备控制功能,用户可以根据需要实现不同设备的控制操作。
1. 照明控制:用户可以通过系统界面调整灯光的亮度、色温、色彩等参数,实现灯光的个性化定制和控制。
2. 空调控制:用户可以通过系统界面调整空调的温度、风速、模式等参数,实现舒适的室内环境和节能效果。
3. 安防控制:用户可以通过系统界面实现对安防设备的控制和管理,如监控摄像头的布防、报警器的启动等。
4. 音视频控制:用户可以通过系统界面控制音视频设备,如电视、音响等,实现音视频的播放、暂停、切换等操作。
五、场景管理场景管理是中控系统的重要功能之一,可以实现多个设备的联动控制。
物联网智能交通信号灯远程控制操作手册

物联网智能交通信号灯远程控制操作手册第1章引言 (3)1.1 概述 (3)1.2 系统组成 (3)1.3 操作准备 (4)第2章系统安装与配置 (4)2.1 硬件安装 (4)2.1.1 设备准备 (4)2.1.2 设备安装 (4)2.2 软件配置 (4)2.2.1 软件准备 (4)2.2.2 软件安装 (5)2.2.3 软件配置 (5)2.3 网络连接 (5)2.3.1 网络环境准备 (5)2.3.2 网络连接配置 (5)第3章基本操作界面 (5)3.1 登录与退出 (5)3.1.1 登录操作 (5)3.1.2 退出操作 (6)3.2 主界面功能介绍 (6)3.3 操作权限管理 (6)第4章信号灯控制基础 (6)4.1 信号灯配时设置 (6)4.1.1 配时概念 (6)4.1.2 配时参数 (6)4.1.3 配时调整 (7)4.2 信号灯模式选择 (7)4.2.1 模式分类 (7)4.2.2 模式切换 (7)4.3 信号灯手动控制 (7)4.3.1 手动控制功能 (7)4.3.2 操作流程 (8)第5章远程控制操作 (8)5.1 信号灯远程监控 (8)5.1.1 登录系统 (8)5.1.2 实时监控 (8)5.1.3 历史数据查询 (8)5.1.4 视频监控 (8)5.2 信号灯远程调整 (8)5.2.1 相位调整 (8)5.2.2 时段调整 (8)5.3 信号灯远程故障诊断 (9)5.3.1 故障报警 (9)5.3.2 故障诊断 (9)5.3.3 维修指导 (9)5.3.4 远程升级 (9)第6章智能调控策略 (9)6.1 车流量数据分析 (9)6.1.1 数据收集 (9)6.1.2 数据处理与分析 (9)6.2 智能优化配时 (9)6.2.1 优化算法 (9)6.2.2 多目标优化 (10)6.3 系统自适应调节 (10)6.3.1 实时调节 (10)6.3.2 预测性调节 (10)6.3.3 系统故障应对 (10)第7章事件管理 (10)7.1 事件类型与处理 (10)7.1.1 事件类型 (10)7.1.2 事件处理 (10)7.2 事件记录与查询 (11)7.2.1 事件记录 (11)7.2.2 事件查询 (11)7.3 事件预警与通知 (11)7.3.1 事件预警 (11)7.3.2 事件通知 (11)第8章用户管理 (12)8.1 用户注册与登录 (12)8.1.1 用户注册 (12)8.1.2 用户登录 (12)8.2 用户权限设置 (12)8.2.1 角色分配 (12)8.2.2 权限设置 (12)8.3 用户行为审计 (13)8.3.1 审计日志查询 (13)8.3.2 审计日志导出 (13)第9章系统维护与升级 (13)9.1 系统日常维护 (13)9.1.1 检查硬件设备 (13)9.1.2 监控软件运行 (13)9.1.3 数据备份 (14)9.1.4 网络安全检查 (14)9.2 系统软件升级 (14)9.2.2 选择合适的升级版本 (14)9.2.3 升级操作 (14)9.2.4 升级后验证 (14)9.3 系统故障处理 (14)9.3.1 硬件故障处理 (14)9.3.2 软件故障处理 (14)9.3.3 网络故障处理 (15)第十章安全与隐私保护 (15)10.1 数据安全策略 (15)10.1.1 数据加密 (15)10.1.2 数据存储安全 (15)10.1.3 数据备份与恢复 (15)10.2 访问控制策略 (15)10.2.1 用户认证 (15)10.2.2 角色与权限管理 (15)10.2.3 行为审计 (15)10.3 隐私保护措施 (16)10.3.1 数据脱敏 (16)10.3.2 最小化数据收集 (16)10.3.3 数据共享与传输 (16)10.4 系统恢复与备份 (16)10.4.1 系统故障处理 (16)10.4.2 定期备份 (16)10.4.3 灾难恢复 (16)第1章引言1.1 概述城市化进程的加快和交通需求的日益增长,智能交通系统已成为提高道路通行能力、缓解交通拥堵、降低交通率的重要手段。
操作手册和用户手册
操作手册和用户手册一、操作手册操作手册的目的是为了让用户更好的上手使用产品,并且能够找到相应的功能点,知道怎么操作,提高用户使用平台的操作性,服务于用户,并且能够适当的减少运营人员解答不必要问题的时间,提高工作效率。
操作手册要做到如下几点1、好找:方便用户找到所需信息,预见用户可能遇到的问题和解决方法;2、通俗易懂:内容清晰,语言和设计简单明了是关键;3、开门见山:让用户知道该如何操作,并知道下一步该做什么。
随着互联网的发展,操作手册都是以在线形式展现,在线形式的操作手册更加方便好用,相比于传统的纸质操作手册,在线的更能轻松查阅到相关内容,更加直观。
大多数操作手册嵌入到产品中,以一种帮助文档的形式出现。
二、用户手册用户手册是详细描述软件的功能、性能和用户界面,使用户了解到如何使用该软件的说明书。
用户手册包含如下功能:1、列出这些资料的作者、标题、编号、发表日期、出版单位或资料来源,包括项目的计划任务书,合同或批文;项目开发计划;需求规格说明书;概要设计说明书;详细设计说明书;测试计划;手册中引用的其他资料、采用的软件工程标准或软件工程规范。
2、列出了运行环境(1)硬件:列出软件系统运行时所需的硬件最小配置,如计算机型号、主存容量;外存储器、媒体、记录格式、设备型号及数量;输入、输出设备;数据传输设备及数据转换设备的型号及数量。
(2)支持软件:操作系统名称及版本号;语言编译系统的名称及版本号;数据库管理系统的名称及版本号;其他必要的支持软件。
3、使用说明(1)安装和初始化:给出程序的存储形式、操作命令、反馈信息及其含义、表明安装完成的测试实例以及安装所需的软件开发工具等。
(2)输入输出:给出输入数据或参数的要求,给出每项输出数据的说明。
(3)出错和恢复:出错信息及其含义、用户应采取的措施,如修改、恢复、再启动等。
4、运行说明(1)运行表:列出每种可能的运行情况,说明其运行目的。
(2)运行步骤:按顺序说明每种运行的步骤,应包括运行控制;操作信息(运行目的、操作要求、启动方法、预计运行时间、操作命令格式及说明、其他事项);输入/输出文件(给出建立和更新文件的有关信息,如文件的名称及编号、记录媒体、存留的目录、文件的支配[说明确定保留文件或废弃文件的准则,分发文件的对象,占用硬件的优先级及保密控制等]);启动或恢复过程。
MOTEC智能驱动器PVT控制模式操作手册说明书

MOTEC智能驱动器PVT控制模式操作手册Version 2.1MOTEC(中国)营业体系2017-06-01版本说明:2017年11月06日发行,Version 2.1;版权信息:本手册为MOTEC(中国)营业体系(以下简称“MOTEC(中国)”)版权所有。
MOTEC(中国)对本手册拥有版权,未经书面授权,不可将本文的全部或部分内容进行复制、翻印、收录、再加工或任何形式的转让。
本文的编著几经审校。
但MOTEC(中国)不对其内容和推论中可能存在的错误担责。
因用户原因使用不当而对产品或用户造成的直接或间接损失,MOTEC(中国)同样免责。
使用本产品时务必遵照使用说明,以免造成设备或人身伤害。
本文中的内容的表述力图精确、可靠,但错误和疏忽之处再所难免,MOTEC(中国)保留随时修改和完善本文档的权利。
最新版本的使用说明书可在 下载。
联系方式:MOTEC(中国)营业体系北京诺信泰伺服科技有限公司地址:北京市通州区环科中路17号11B (联东U谷西区)电话:************-666传真:************邮编:100027网址:eMail:*********************目录1.PVT基础 (4)2.PVT通讯指令和寄存器 (5)2.1PVT通讯指令 (5)2.1.1 写数据到PVT队列 (5)2.1.2 获取参数表参数 (6)2.1.3 设置参数表参数 (6)2.1.4 写PVT数据到驱动器Flash (7)2.2 PVT相关寄存器 (8)3.PVT模式使用说明 (9)3.1PVT数据存储格式 (10)3.1.1位置和速度存储格式 (10)3.1.2PVT队列 (11)3.1.3 PVT数据内置Flash (12)3.2PVT通讯队列模式 (13)3.3 PVT内部模拟模式 (14)4.使用PVT模式注意事项 (15)4.1异常情况发生及处理 (15)4.2PVT模式下其他控制功能的使用 (15)4.3PVT周期时间的选择 (15)4.4速度设定值对PVT结果的影响 (15)4.5绝对运动和相对运动 (15)4.6PVT/PT说明 (15)5.CANopen模式下使用PVT功能 (16)5.1PVT功能相关对象字典 (16)5.2PVT功能相关对象字典 (16)5.2.1 对象0x609C:PVTQUEUE_HEAD (PVT队列头) (16)5.2.2 对象0x609D:PVTQUEUE_TAIL (PVT队列尾) (17)5.2.3 对象0x609E:PVTQUEUE_STATUS (PVT队列状态) (17)5.2.4对象0x609F:PVTQUEUE_ALARM_SIZE (PVT队列数据报警阈值) (17)5.2.5 对象0x60A0:PVTQUEUE_CLEAR (清空PVT队列) (18)5.2.6 对象0x60A1:PVT_TIME (PVT周期) (18)5.2.7对象0x60A2:PVT_RUNMODE (PVT运行模式) (19)5.2.8对象0x60A3:PVT_ RUNSTOP (PVT启动停止) (19)5.2.9对象0x60A4: CANOPEN_PROFILE_PVTSIMAPLLITUDE (PVT内部模拟模式幅值) (19)5.2.10 对象0x60A5:PVT_SIM_PERIOD(PVT内部模拟模式周期) (20)5.2.11 对象0x60A6: PVT_RUNTIMES(PVT内部Flash模式运行次数) (20)5.2.12 对象0x60A7: PVT_FILTER(PVT滤波器) (21)5.2.13 对象0x60A8:CANOPEN_PVT_POSITION(PVT位置值) (21)5.2.14 对象0x60A9:CANOPEN_PVT_VELOCITY(PVT速度值) (21)5.3CANopen通讯下PVT功能的实现 (22)5.3.1配置步骤 (22)6.联系方式 (22)1.PVT基础PVT(Position,Velocity,Time)控制模式即利用一个固定时间间隔的位置和速度序列重建较复杂曲线的运动轨迹的轨迹规划过程。
Windchill基本操作手册
Windchill 9.1 M010 基本操作手册文档控制更改记录目录文档控制 (ii)更改记录 (ii)目录 (iii)1.安装java、Windchill的访问方法 (1)1.1安装JAVA (1)1.2Windchill的访问方法 (4)2.Windchill的基本操作 (6)2.1浏览页签,切换各窗口 (6)2.2查看对象 (7)2.3搜索 (14)2.4下载插件 (21)2.5设置首选项 (21)2.6指配任务 (24)2.7措施项 (26)2.8ProductView可视化 (28)2.9预订 (33)3.业务操作 (36)3.1文档管理 (36)3.2部件管理 (43)3.3对象关联性 (47)3.4升级 (55)3.5BOM编辑 (59)3.6对象移动 (62)3.7修订 (65)4.业务管理 (67)4.1产品管理 (67)4.2项目管理 (72)1.安装java、Windchill的访问方法1.1安装JAVA获得JAVA程序后,双击如下图标:会出现以下界面:选择“接受”。
出现以下界面:点击“下一步”,出现以下界面:点击“下一步”,出现以下界面:点击“完成”,JAVA 程序安装完毕。
1.2Windchill的访问方法1.2.1HOST文件的设置将本机“C:\WINDOWS\system32\drivers\etc\hosts”文件里添加服务器的IP地址和计算机名称。
如下图:1.2.2登陆Windchill访问地址:http://服务器的计算机名称/Windchill/例如:若服务器的计算机名称是,则访问地址是http:// /Windchill/。
输入用户名和密码。
在标记位置添加服务器的IP地址和计算机名称1.2.3退出Windchill点击此图标2.Windchill的基本操作2.1浏览页签,切换各窗口我们进入Windchill了“主页”的“概述”窗口,也可以通过各页签和页签下的选项进入所需要的窗口。
数字控制器CH系统操作手册
产品说明:数字控制器CH系统操作手册1.产品型号说明CH□02□□□□-□□*□□-□□①② ③④⑤ ⑥⑦ ⑧9① 控制:F:PID动作及自动计数(逆向动作) D:PID动作及自动计数(直接动作)② 输入方式③范围代码:参考8输入范围表*④第一控制输出(OUT1)(加热侧):M:继电器输出 T:三端双向可控开关 V:电压脉冲 B:电流(4到20毫安直流)G:过零(用于三端双向可控驱动)⑤第二控制输出(OUT2)(制冷侧)⑥警报输出[ALM1]N:没有警报 A:高偏差警报 B:低偏差警报 C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续7:警报输出[ALM1]N:没有警报 A:高偏差警报 B:低偏差警报 C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续8:交流功能:N:无交流功能 5:RS-485(2-线系统)9:防水防尘结构:N:无防水/防尘结构 1:防水/防尘结构2.安装2.1 安装条件※ 环境温度不低于0度或不超过50度※ 环境湿度不低于45%或不超过85%RH※ 无腐蚀或易燃气体。
※ 无水、油、化学品、蒸汽飞溅的地方※ 无过多感应燥音,静电,磁场。
※ 无热凝聚形成热辐射2.2 尺寸3.警告3.1 接线注意事项(1)对于热电偶输入的,使用特定的补偿线。
(2)对于热电阻输入的,使用低电阻线,并且三个线头间不带电阻差。
(3)将输入信号线绕开仪表电源,电气设备电源及负荷线以防止燥音感应。
(4)对于电流输入,必须由输入端提供一个250欧的电阻器(±0.02%±10ppnm, 0.25W)。
3.2 仪表接线电源供给电压:90至264V交流电50/60HZ 、≤7W警报输出等级:继电器联接输出:250伏交流电,1安(电阻性负载)控制输出等级:继电器联接输出:250伏交流电,3安(电阻性负载)电压脉冲输出:0/12伏直流电(负荷电阻600欧或更多)电流输出:4至20MA直流电(负荷电阻600欧或更少)过零输出(用于三端双向控制驱动):过零触发用4.面板说明1)所测数值(PV)显示单元:显示所测得的数值(PV)、显示仪表的不同参数标记2)设置数值(SV)显示单元:显示设置的数值(SV)、显示仪表的不同设置参数3)指示灯**自动整定指示灯(AT),在自动整定时闪烁控制输出指示灯(OUT1),在控制输出打开时亮警报输出指示灯(ALM1),在警报时亮辅助输出指示灯(OUT2),在辅助输出打开时亮4)设置键(SET):用于输入/调出参数,按二秒以上可以读出表二数据5)转换和R/S键(R/S):在设置改变时转换数字(转换键),用于选择运行/停止功能6)下降键:用于降低数字7)上升键:用于升高数字5.显示模式状态5.1每个模式的开启程序打开电源→显示输入方式→显示输入范围(大约显示4秒钟)→如果按键后没有反应的时间超过1分钟,仪表回复到PV/SV 显示模式状态。
FANUC机器人操作说明书资料

FANUC机器人操作说明书资料FANUC机器人操作说明书资料一、安全注意事项在使用FANUC机器人之前,请务必阅读以下安全注意事项,确保操作过程的安全性:1、机器人操作应由经过充分培训且熟悉机器人系统的操作员进行。
未经授权的人员操作可能导致人身伤害或设备损坏。
2、确保机器人运行区域内的安全。
在操作机器人之前,清除杂物,确保机器人移动路径畅通无阻。
3、始终保持机器人周围的工作区域整洁、清晰,以防止意外碰撞。
4、在操作机器人之前,务必确认急停装置的位置并确保其处于良好状态。
5、操作机器人时,必须始终保持警惕,以防潜在的危险。
6、在操作过程中,如果机器人出现任何异常情况,立即按下紧急停止按钮,以停止机器人运动。
7、定期对机器人进行维护和检查,以确保其始终处于良好状态。
二、基本操作以下是FANUC机器人的基本操作步骤:1、打开机器人控制电源,启动机器人。
2、通过示教器或触摸屏界面,输入机器人程序并加载运行。
3、使用手动控制模式,手动操纵机器人的关节轴,使其移动到所需位置。
4、根据程序设置,调整机器人的运动速度和加速度,以确保安全运行。
5、在运行过程中,根据需要调整机器人的运动轨迹和姿态。
6、当完成程序运行时,通过示教器或触摸屏界面停止程序的执行。
7、关闭机器人电源,结束操作。
三、编程与调试以下是FANUC机器人的编程与调试步骤:1、使用示教器或触摸屏界面进入编程模式。
2、根据所需任务和工艺要求,创建新的机器人程序或修改现有程序。
3、在程序中添加必要的指令和动作,以实现所需的运动路径和姿态。
4、对程序进行调试和优化,确保机器人在安全、稳定和高效的情况下运行。
5、在调试过程中,根据实际运行情况进行必要的参数调整和优化。
6、当程序调试完成后,将其保存并退出编程模式。
7、在实际运行过程中,根据需要随时调整程序参数和指令,以满足不同的工艺需求。
四、维护与保养为了保证FANUC机器人的稳定性和持久性,以下是一些建议的维护与保养操作:1、定期检查机器人的关节轴、传感器和电缆等部件是否有磨损或损坏。
电源系统控制面板用户操作手册说明书
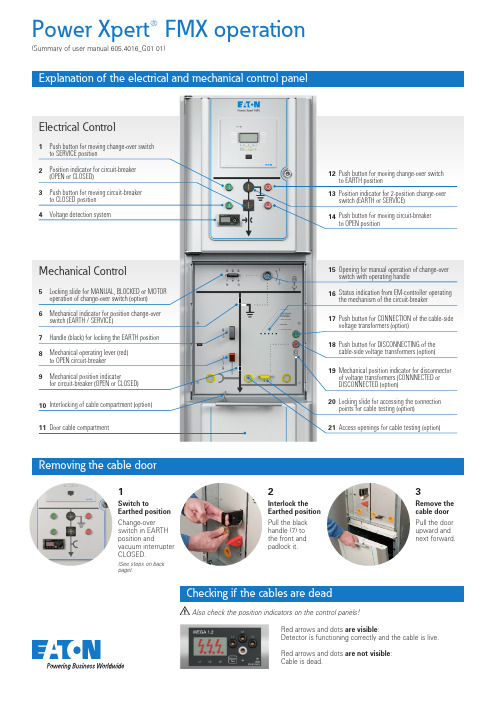
Removing the cable doorChecking if the cables are deadPower Xpert® FMX operation(Summary of user manual 605.4016_G01 01)1Switch toEarthed position Change-overswitch in EARTH position andvacuum interrupter CLOSED.(See steps on back page).2Interlock the Earthed position Pull the black handle (7) to the front and padlock it.Red arrows and dots are visible :Detector is functioning correctly and the cable is live.Red arrows and dots are not visible : Cable is dead.3Remove the cable door Pull the door upward and next forward.1OPEN circuit-breakerwith red push button.2Operate change-overswitch to EARTH positionwith red push button.3CLOSE circuit-breakerwith green push button.4Earthed PositionChange-over in EARTHED position and vacuum interrupter CLOSED.The earthed position can be inter-locked by means of a padlock. Pull the black interlocking handle (7) and padlock it.1OPEN the circuit-breaker by pushing the red lever (8) downwards.Next keep the red lever (8) down and insert the operating handle.Contactinformation www.eaton.eu/electrical T: +31 74 246 9111Service: +31 74 246 68882Switch the change-over switch to the safe Earthed position by turning the operation handle clockwise.By checking the position indicators (6) make sure the final position of the change-over switch is reached.Before operation make sure that the locking slide (5) is positioned in motor operation ().Before operation make sure that the locking slide (5) is positioned in manual operation ().From service position to earthed position1OPEN circuit-breaker withred push button.2Operate change-overswitch to SERVICE positionwith green push button.3CLOSE circuit-breakerwith green push button.4Service PositionChange-over in SERVICE position and vacuuminterrupter CLOSED.From earthed position to service positionDoc.nr: 606.9636_02_ENG。
Schmitt Industries SB-1000 平衡控制器 操作手册说明书
SB-1000平衡控制器 操作手册LL-1106 版本 1.0Productivity through Precision™有限使用许可协议在打开包含产品和授权许可的电脑软件之前,请仔细阅读以下条款和条件。
连接电源至微处理器控制单元即表示您接受这些条款和条件。
如果您不同意这些条款和条件,请在购买之日起15日内将所购装置退还经销商,经销商会退还您的货款。
如果经销商未退还您的货款,请立即按以下地址联系SCHMITT INDUSTRIES, INC.,安排退款事宜。
Schmitt Industries, Inc. 提供硬件和包含在微处理控制单元内的电脑软件程序。
Schmitt Industries, Inc.拥有此类软件及相关文件(“软件”)的专属权益,并依照以下条款和条件授权您使用该软件。
您将承担选择产品以实现期望结果以及安装、使用和所获相应结果的责任。
授权许可条款和条件a. 您被授权仅可使用基于产品和与产品有关的软件的非独占永久许可。
您同意软件权益永远归属Schmitt Industries, Inc.所有。
b. 您及您的员工和代理人同意保护软件的机密性。
您不得散布、披露或以其他方式提供软件给任何第三方,除非受让人同意遵守这些许可条款和条件。
不论授权许可出于何种原因终止或到期,保密义务依然有效。
c. 您不得拆解、解码、翻译,复印、复制或修改软件,除因产品使用所需的存档或备份目的制作副本外。
d. 您同意保留软件的一切所有权声明和标记。
e. 如果受让人同意遵守本许可协议的所有条款和条件,则您可以转让产品和本许可协议。
一旦转让,则您的许可权益立即终止,并且您同意立即销毁手中掌握的所有软件副本。
操作和规格手册用于SB-1000平衡控制器LL- 1106手册版本号1.1 – 2012年2月©2012 Schmitt Industries, Inc.公司办公室2765 NW Nicolai St. Portland, OR 97210 USA *************************电话:+1 503.227.7908 传真:+1 503.223.1258 Schmitt Europe LtdGround Floor Unit 2Leofric Court, Progress WayBinley Industrial Estate Coventry, CV3 2NT, England********************.uk电话:+44-(0)2476-651774传真:+44-(0)2476-450456SBS 系统 – SB-1000操作SBS SB-1000平衡控制器的优点:∙强化的数字电子设计,延长使用寿命,增强可靠性∙易于安装和操作∙缩短设置时间,提高产出率∙自动平衡精度达到0.02微米水平,提高部件质量∙延长砂轮、修整轮和主轴轴承寿命∙图标式用户界面,全球适用∙世界级SBS 客户服务∙与现有的SBS 设备兼容SBS 系统 – SB-1000操作目录系统功用 (1)操作员安全摘要 (1)平衡理论 (2)自动平衡概述 (2)手动平衡概述 (3)环境考虑因素 (3)其它振动来源 (3)磨床状况 (3)系统安装 (4)控制单元 (4)后面板连接 (4)振动传感器位置 (5)外平衡器/接头 — 自动模式 (5)内平衡器 — 自动模式 (7)RPM 传感器 — 手动模式 (7)控制单元操作说明 (8)控制单元前面板 (8)起动和运行 (9)通电屏幕 (9)多机操作 (9)主屏幕 (10)准备设置运行参数 (12)背景振动 (12)验证平衡器刻度 – 自动平衡模式 (12)限值 (12)公差 (13)临界振动 (13)何时执行自动平衡 (13)设置概述 (13)选择平衡模式(自动或手动) (13)设置模式操作 (14)自动平衡模式 (15)设置自动模式 (15)自动平衡操作 (15)手动移动砝码 - 自动平衡模式 (16)手动平衡模式 (17)设置手动模式 (17)手动平衡概述 (18)修整阶段 (18)单点手动平衡 (19)双砝码和三砝码手动平衡 (22)固定位置手动平衡 (24)硬线接口 (27)硬线接口概述 (27)输入引脚名称和功能 (28)输出引脚名称和功能 (28)CNC/系统正时图 (30)系统维护 (31)SBS 系统 – SB-1000操作集电极维护 (31)SBS 退货/维修政策 (31)平衡器线缆(SB-48xx/SB-48xx-V) (32)RPM 传感器(SB-1816) (32)振动传感器(SB-14xx) (32)故障排查指南 (33)错误指示(Error Indications) (34)出厂默认设置 (35)附录 A:规格 (36)附录 B:更换零件清单 (37)SBS 系统 – SB-1000操作系统功用为使磨床砂轮准确切割,保证表面的光滑性和部件几何外形的正确性,需要预防磨削过程中的振动。
伍德沃德 easygen-3100 发电机组控制器 操作手册说明书
37409ABrief Operation Information for easYgen-3100Software Version: 1.10xxPart Numbers: 8440-1817 / 8440-1818Manual 37409AeasYgen-3000 Series (Package P1) Genset ControlManual 37409AeasYgen-3000 Series (Package P1) - Genset ControlPage 2/8 © WoodwardWARNINGRead this entire manual and all other publications pertaining to the work to be performed before instal-ling, operating, or servicing this equipment. Practice all plant and safety instructions and precautions. Failure to follow instructions can cause personal injury and/or property damage.The engine, turbine, or other type of prime mover should be equipped with an overspeed (overtempe-rature, or overpressure, where applicable) shutdown device(s), that operates totally independently of the prime mover control device(s) to protect against runaway or damage to the engine, turbine, or oth-er type of prime mover with possible personal injury or loss of life should the mechanical-hydraulic governor(s) or electric control(s), the actuator(s), fuel control(s), the driving mechanism(s), the lin-kage(s), or the controlled device(s) fail.Any unauthorized modifications to or use of this equipment outside its specified mechanical, electric-al, or other operating limits may cause personal injury and/or property damage, including damage to the equipment. Any such unauthorized modifications: (i) constitute "misuse" and/or "negligence" with-in the meaning of the product warranty thereby excluding warranty coverage for any resulting damage, and (ii) invalidate product certifications or listings.CAUTIONTo prevent damage to a control system that uses an alternator or battery-charging device, make surethe charging device is turned off before disconnecting the battery from the system.Electronic controls contain static-sensitive parts. Observe the following precautions to prevent dam-age to these parts. • Discharge body static before handling the control (with power to the control turned off, contact a grounded surface and maintain contact while handling the control).• Avoid all plastic, vinyl, and Styrofoam (except antistatic versions) around printed circuit boards. •Do not touch the components or conductors on a printed circuit board with your hands or with conductive devices.OUT-OF-DATE PUBLICATIONThis publication may have been revised or updated since this copy was produced. To verify that youhave the latest revision, be sure to check the Woodward website: /pubs/current.pdfThe revision level is shown at the bottom of the front cover after the publication number. The latest version of most publications is available at: /publicationsIf your publication is not there, please contact your customer service representative to get the latest copy.Important definitionsWARNINGIndicates a potentially hazardous situation that, if not avoided, could result in death or serious injury.CAUTIONIndicates a potentially hazardous situation that, if not avoided, could result in damage to equipment.NOTEProvides other helpful information that does not fall under the warning or caution categories.Woodward reserves the right to update any portion of this publication at any time. Information provided by Woodward is believed to be correct and reliable. However, Woodward assumes no responsibility unless otherwise expressly undertaken.© Woodward All Rights Reserved.Manual 37409AeasYgen-3000 Series (Package P1) - Genset Control© Woodward Page 3/8Revision HistoryContentDocument Overview ................................................................................................................................. C HAPTER 1. G ENERAL I NFORMATION ....................................................................................... 4 4 Introduction ............................................................................................................................................... 5 Configuring AUTOMATIC Operating Mode .............................................................................................. C HAPTER 2. I MPORTANT C ONFIGURATIONS .............................................................................. 6 6 Configuring the Unit for Remote Start ...................................................................................................... 7 Configuring the Unit for External Acknowledge ........................................................................................ 7 Restoring the Factory Settings ................................................................................................................. 7 Resetting the Event History . (7)Manual 37409AeasYgen-3000 Series (Package P1) - Genset ControlPage 4/8 © WoodwardChapter 1.General InformationDocument Overview≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡Intended Use The unit must only be operated as described in this manual. The prerequisite for a proper and safe operation of the product is correct transportation, storage, and installation as well as careful operation and main-tenance.NOTEThis manual has been developed for a unit equipped with all available options. Inputs/outputs, func-tions, configuration screens, and other details described which do not exist on your unit may be ig-nored.The present manual has been prepared to enable the installation and commissioning of the unit. Be-cause of the large variety of parameter settings, it is not possible to cover every combination. The ma-nual is therefore only a guide. In case of incorrect entries or a total loss of functions, the default set-tings may be taken from the list of parameters in the configuration manual 37224 or from ToolKit and the respective *.SID file.Manual 37409AeasYgen-3000 Series (Package P1) - Genset Control© Woodward Page 5/8Introduction≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡The easYgen-3100 is a model of the easYgen-3000 series without display and buttons. It corresponds with the ea-sYgen-3200 except the following differences:• No display• No push button softkeys• Metal housing instead of plastic housing • Ground connection on the housing• No MANUAL operating mode possible (no softkeys for manual operation) • Event history entries cannot be deleted individuallyThe easYgen-3100 is designed for switch cabinet back mounting It may be controlled via a control device (PLC). It may be configured using ToolKit, Modbus or CAN bus. We recommend to use ToolKit for commissioning the easYgen-3100. ToolKit may also be used for visualizing measured values, alarm messages and events.NOTERefer to the Configuration Manual 37224 for a description of how to configure the unit via ToolKit.NOTERefer to the Interface Manual 37383 for a description of how to configure the unit via Modbus or CAN bus.There are some important configurations which are required for the easYgen-3100 to operate. These configura-tions are described in detail in the next chapter.Manual 37409AeasYgen-3000 Series (Package P1) - Genset ControlPage 6/8 © WoodwardChapter 2.Important ConfigurationsConfiguring AUTOMATIC Operating Mode≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡The easYgen-3100 provides no MANUAL operating mode because it has no buttons for controlling the genset manually. The unit is in STOP operating mode by default, i.e. in the state in which it is delivered or after resetting the default values. Therefore, the LogicsManager function 00.16 "Operat. mode AUTO" (parameter ID 12510) must either be fixed to AUTOMATIC operating mode or configured for a discrete input to select the operating mode together with the LogicsManager function 00.18 "Operat. mode STOP" (parameter ID 12530).NOTEIf the AUTOMATIC operating mode is configured to always active, the easYgen will always perform a start as soon as a start command (via LogicsManager , discrete input, or emergency operation) is is-sued and all stopping alarms are acknowledged.Refer to the LogicsManager section of the Configuration Manual 37224 or the Performing Remote Start/Stop and Acknowledgement section of the Application Manual 37226 for detailed information about the configuration of the LogicsManager . The configuration of the LogicsManager functions via CAN bus or Modbus is described in the respective sections of the Interface Manual 37383.Manual 37409AeasYgen-3000 Series (Package P1) - Genset Control© Woodward Page 7/8Configuring the Unit for Remote Start≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡The easYgen-3100 must be configured to be able to start/stop the genset remotely as well as to acknowledge poss-ible alarms remotely.The LogicsManager function 00.09 "Start req. in AUTO" (parameter ID 12120) must be configured that the gen-set can be started. This may either be performed via a discrete input (standard setting) or the "Remote request" command, which may be enabled via an interface. Refer to the Performing Remote Start/Stop and Acknowledge-ment section of the Application Manual 37226 and the Interface Manual 37383 for detailed information about the configuration of the unit for remote start.Configuring the Unit for External Acknowledge≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡The LogicsManager function 00.15 "Ext. acknowledge" (parameter ID 12490) must be configured in a way that alarms may be acknowledged externally. This may either be performed via a discrete input (standard setting) or the "Remote acknowledge" command, which may be enabled via an interface. Refer to the Performing Remote Start/Stop and Acknowledgement section of the Application Manual 37226 and the Interface Manual 37383 for detailed information about the configuration of the unit for external acknowledge.NOTEAll alarm messages may also be visualized and acknowledged via ToolKit. The "Clear all" button al-lows to acknowledge all alarm messages, which are not active anymore.NOTERefer to the Remotely Acknowledging Single Alarm Messages section of the Interface Manual 37383 for detailed information about acknowledging individual alarm messages via Modbus.Restoring the Factory Settings≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡The default values may either be reset via ToolKit or the interface (parameter ID 1701). Refer to the Remotely Resetting the Default Values section of the Interface Manual 37383 for detailed information.Resetting the Event History≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡The event history may either be cleared via ToolKit or the interface (parameter ID 1706). Refer to the Remotely Clearing the Event History section of the Interface Manual 37383 for detailed information.Woodward GmbHHandwerkstrasse 29 - 70565 Stuttgart - GermanyPhone +49 (0) 711 789 54-0 • Fax +49 (0) 711 789 54-100**********************Homepage/powerWoodward has company-owned plants, subsidiaries, and branches, as well as authorized distributors and other authorized service and sales facilities throughout the world.Complete address/phone/fax/e-mail informationfor all locations is available on our website ().2009/10/Stuttgart。
操作手册如何进行内容归档
操作手册如何进行内容归档在当今数字化和信息化的时代,操作手册作为指导人们正确操作设备、系统或执行任务的重要文档,其数量和复杂性不断增加。
有效的内容归档对于提高操作手册的可用性、维护性和可管理性至关重要。
那么,如何进行操作手册的内容归档呢?首先,我们需要明确归档的目标。
操作手册的内容归档并非简单地将资料堆积在一起,而是要建立一个有条理、易于查找和更新的体系。
其主要目标包括:方便用户快速找到所需信息,确保信息的准确性和完整性,提高手册的维护效率,以及为未来的参考和改进提供便利。
在开始归档之前,要对操作手册的内容进行全面的梳理和分类。
这可以根据操作的对象、流程、功能模块等方面进行划分。
例如,如果是关于一款软件的操作手册,可以按照登录注册、主界面操作、各个功能模块(如文件管理、数据编辑、报表生成等)、设置选项、故障排除等类别来区分。
为了确保分类的清晰和合理性,可以采用层级结构。
比如,将操作手册的内容分为一级类目、二级类目甚至三级类目。
以设备操作手册为例,一级类目可以是设备的总体介绍、安装与调试、日常操作、维护与保养、故障处理等;二级类目在日常操作中可以进一步细分为开机步骤、运行中的参数设置、关机流程等。
接下来是制定统一的命名规范。
清晰明确且具有一致性的命名对于快速找到所需内容至关重要。
命名可以包含操作对象、操作环节、版本号等关键信息。
例如,“软件名称V10 日常操作登录流程”、“设备型号维护与保养季度检查要点”。
对于每一个归档的内容,都应该有详细的描述和说明。
这包括操作的步骤、注意事项、可能出现的问题及解决方法等。
描述要简洁明了,避免使用过于复杂的技术术语,尽量用通俗易懂的语言表达。
同时,要配上相关的图片、图表或视频,以增强内容的直观性和理解性。
在归档时,要选择合适的存储介质和工具。
可以使用电子文档管理系统、云存储服务或者本地的文件夹结构。
如果使用电子文档管理系统,要设置好相应的权限,确保只有授权人员能够访问和修改。
qact操作手册

qact操作手册摘要:一、前言二、QACT 操作手册简介1.QACT 的定义2.QACT 操作手册的目的和适用范围三、QACT 操作步骤1.准备工作2.任务规划3.执行任务4.任务结束四、QACT 操作注意事项1.遵循安全规定2.保持设备良好状态3.及时记录和报告五、QACT 操作手册的更新与维护1.更新周期2.反馈与建议六、附录1.QACT 操作手册的查阅与分发2.术语与解释正文:一、前言为了帮助用户更好地理解和使用QACT(Quality Assurance and Control Techniques,质量保证与控制技术),我们编写了这本QACT 操作手册。
本手册将详细介绍QACT 的定义、操作步骤、注意事项等内容,旨在为用户提供一个实用的参考工具。
二、QACT 操作手册简介1.QACT 的定义QACT 是一种质量保证与控制技术,它通过采用各种方法、工具和技巧,确保产品或服务满足预定的质量标准和要求。
QACT 主要包括预防性控制、评价性控制和纠正性控制等,适用于各种类型的组织、行业和领域。
2.QACT 操作手册的目的和适用范围本操作手册旨在为QACT 的实施提供一个统一的指导,适用于所有使用QACT 的人员。
无论您是质量管理人员、工程技术人员还是操作人员,都可以从本手册中获得有用的信息。
三、QACT 操作步骤1.准备工作在进行QACT 操作之前,需要做好以下准备工作:- 确定操作对象:明确需要实施QACT 的产品或服务。
- 收集相关信息:了解与操作对象相关的质量要求、标准、法规等。
- 确定操作人员:选择具备相应技能和资质的人员进行操作。
2.任务规划根据操作对象的特点和质量要求,制定具体的任务计划,包括:- 确定控制方法:选择合适的预防性、评价性或纠正性控制方法。
- 制定操作规程:明确具体的操作步骤、参数和工具。
- 分配资源:确保人员、设备、材料等资源充足且合理分配。
3.执行任务按照任务规划进行操作,并密切关注操作过程中的关键点,确保质量得到有效控制:- 实施控制方法:按照规程执行预防性、评价性或纠正性控制。
南钢焦化厂控制系统操作手册
用户操作手册(工艺操作人员)本手册是针对工艺操作人员而编写的,通过本手册学习,用户能够掌握生产装置在运行期间的日常操作,并利用提供的各种生产数据监测与分析手段对生产过程运行情况进行分析及故障判断。
手册包括以下内容:控制仪表面板的操作方法工艺流程画面的数据监视与操作报警的处理与报警数据分析趋势图的监视与分析生产报表的打印用户登陆等其他操作事宜第一章 控制仪表面板的操作方法图一为控制仪表的面板,其操作方法与传统控制仪表面板相似,但针对焦化炉控制的特点,做了专门的设计,是操作更加直观、灵活。
微调按钮(上)(一个刻度) 速调按钮(上)(1%刻度) 外给定信号(优化)作为给定值 微调按钮(下)(一个刻度) 让给定等于测量(手动有效) 根据本地给定值自动调节 手动控制阀门开度点击该区域,弹出阀门开度值 输入对话框(手动有效) 速调按钮(下)(1%刻度) 手/自动/串级状态显示 工程单位 外给定值(CA ) 内给定值(SP )调节器输出阀门开度 调节器输出阀门打开按钮(1%步长)调节阀开度模拟表显示调节阀开度反馈模拟表显示(现场实际开度)PID 参数整定按钮测量值数字显示 测量值模拟显示测量值模拟显示 给定(SP ), 测量(PV )标签 调节器输出阀门关闭按钮(1%步长)调节阀开度刻度图一. 控制仪表面板图说明仪表位号标签1.手动操作? 按手动操作按钮,使调节器处于手动状态操作,“手/自动/串级状态显示”将显示“手动”字样。
? 手动状态时,操作人员可以手动控制阀门的开关。
? 每按一次调节器输出阀门打开/关闭按钮(),调节阀开度将改变1%刻度。
? 当鼠标移到“调节阀开度指示值”周围,鼠标变为带绿色尾巴的形状,这时,点击鼠标左键将调出图二所示画面。
在该对话框内可以直接设定阀门的开度(直接输入开度值或用滚动条推拉),然后按“确定”,新的阀门开度被系统接受;如果“取消”便不接受所调整的值。
? 需要输入调节阀开度值时,在数值框内点击一下,输入新值后回车,可看到新的开度值,滚动条也随之变化。
RT-LAB操作手册
# ls 相当于DOS的dir命令。
# cp 相当于DOS的copy命令。
# rm 相当于DOS的del命令。
# ph 启动QNX的图形界面Photon。
# textto ASCII文档的转换。因为UNIX的ASCII文档换行符与DOS格式的ASCII换行符不 同,因此DOS格式的ASCII文档在QNX平台下可能无法识别。# textto –l 可以将DOS格 式转换为QNX格式。
5 Assign Nodes 分配节点
点 击 Assign Nodes 进 入 节 点 分 配 控 制 界 面 。 在 Subsystems 一 项 下 面 有 sm_controller 和ss_plant两个子系统。在Remaining Physical Nodes一项下面有NTO1 和NTO2 两个节点,因为我们现在只建立了两个目标节点,所以只有NTO1 和NTO2 两个节点,添加节点的方法在前面的Configuration说明中有提到。现在通过鼠标选 择sm_controller和NTO1 然后再点击<<——就可以实现将子系统sm_controller分配 到NTO1 节点上去。同样再把ss_plant分配到NTO2 上去,这样就完成了节点的分配。
RT-LAB 操作手册
KL012007-02
上海科梁电子技术有限公司
1
目录
1 Open Model 打开模型....................................................................................1 2 Edit 编辑模型................................................................................................. 2 3 Configuration 配置修改................................................................................. 3 4 Compile 编译过程.......................................................................................... 5 5 Assign Nodes 分配节点..................................................................................5 6 Load 下载可执行文件....................................................................................6 7 Execute 执行程序........................................................................................... 8 8 Pause 暂停执行...............................................................................................8 9 Reset 结束程序............................................................................................... 8 10 Disconnect 断开模型连接.......................................................................... 8 11 附录 基本的QNX命令行操作..................................................................9
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
宇龙机电控制仿真软件控制对象操作手册目录简介 (4)1水池 (5)2三相小车 (6)3运料小车 (8)4混合罐 (10)5洗衣机 (14)6带车灯自动门 (15)7道杆自动门 (18)8自动门 (21)9售货机 (24)10喷水池 (26)11交通灯 (28)12传送带 (29)13带物体传送带 (31)14三台水泵 (32)15钻孔动力头 (34)16自动剪板机 (36)17自动螺纹加工 (38)18自动上料机 (41)19工位机械手 (43)20旋转工作台 (47)21钻床加工系统 (50)22自动装药机 (54)23双层车库 (56)24传送带机械手 (58)25简单自动门 (62)简介当用户对机电的元器件有一定的了解后,用户可以选择用继电器、接触器或PLC 来实现综合应用模板的自动化控制(模板的控制要求用户可根据模板的功能自行设定),提高对机电的应用能力。
构件:水池实物图:接线图:使用说明:出水口含有电磁阀。
给它通电,可往水池里放水。
鼠标点击液位开关,上下移动鼠标,液位开关可上下运动,用来处理不同的液位控制要求,液位开关的初始状态是上面为常闭触点下面为常开触点。
抽水泵实质是一个三相异步电动机,该电动机已被连接为星型,通电时只需连接三相电即可。
PLC控制水塔水位自动运行电路系统,示意图如下。
控制要求:当水池水位低于水池低水位界限时,液面传感器的开关S01接通(ON),发出低位信号,指示灯1闪烁(每隔1秒为一脉冲);电磁阀门Y打开,水池进水。
水位高于低水位界时,开关S01断开(OFF);指示灯1停止闪烁。
当水位升高到高于水池高水位界时,液面传感器使开关S02接通(ON),电磁阀门Y关闭,停止进水。
如果水塔水位低于水塔低水位界时,液面传感器的开关S03接通(ON),发出低位信号,指示灯2闪烁(每隔2秒为一脉冲);若此时水池水位高于水池低水位界限时,则电动机M运转,水泵抽水。
水塔水位高于低水位界时,开关S03断开(OFF);指示灯2停止闪烁。
水塔水位上升到高于水塔高水位界时,液面传感器使开关S04接通(ON)电动机停止运行,水泵停止抽水。
构件:三相小车实物图:使用说明:用鼠标点击行程开关,然后移动鼠标可在拖出一个行程开关(最多不超过5个),行程开关的初始状态是上面为常闭触点,下面为常开触点。
用行程开关来控制小车的前进、后退以及停止。
小车电动机为交流三相异步电动机,电动机正转,小车向右运动,反之小车向左运动。
电动机的接线图为例题:某自动生产线上的运料小车运行如图所示,运料小车由一台三相异步电动机拖动,电机正转,小车右行;电机反转,小车左行。
在生产线上有5个编码位1~5的站点供小车停靠,在每个停靠站安装一个行程开关以检测小车是否到达该站点。
对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫按钮开关分别与5个停靠站点相对应。
控制要求:1、按下启动按钮,系统开始工作;按下停止按钮,系统停止工作。
2、当小车当前所处停靠站的编码小于呼叫按钮的编码时,小车右行,运行到呼叫按钮所对应的停靠站时停止。
3、当小车当前所处停靠站的编码大于呼叫按钮的编码时,小车左行,运行到呼叫按钮所对应的停靠站时停止。
4、当小车当前所处停靠站的编码等于呼叫按钮的编码时,小车保持不变。
5、呼叫按钮应有互锁功能,先按下者优先。
构件:运料小车实物图:接线图:使用说明:用鼠标点击行程开关,然后移动鼠标可改变行程开关的位置,行程开关的初始状态是上面为常闭触点,下面为常开触点。
用行程开关来控制小车的运动、停止以及什么时候加料。
用鼠标点击装料电磁阀,然后移动鼠标可在添加一个装料电磁阀,最多不超过3个。
给装料电磁阀通电,可给小车加料。
COM端为前三个接线柱的公共端,如果给前进端、COM端通电,小车前进(右行),给后退端、COM端通电,小车后退(左行),给卸料端、COM端通电,小车卸料。
实例:PLC控制运料小车,示意图如下:控制过程:其中启动按钮SB1用来开启运料小车,停止按钮SB2用来手动停止运料小车(其工作方式见考核要求3选定)。
按SB1小车从原点起动,KM1接触器吸合使小车向前运行直到碰SQ2开关停,KM2接触器吸合使甲料斗装料5秒,然后小车继续向前运行直到碰SQ3开关停,此时KM3接触器吸合使乙料斗装料3秒,随后KM4接触器吸合小车返回原点直到碰SQ1开关停止,KM5接触器吸合使小车卸料5秒后完成一次循环。
工作方式由用户设定:(1)、小车连续循环与单次循环可按SA1进行选择,当SA1为“0”时小车连续循环,当SA1为“1”时小车单次循环;(2)小车连续循环,按停止按钮SB2小车完成当前运行环节后,立即返回原点,直到碰SQ1开关立即停止;当再按启动按钮SB1小车重新运行;(3)、连续作3次循环后自动停止,中途按停止按钮SB2则小车完成一次循环后才能停止。
构件:混合罐实物图:接线图:使用说明:鼠标点击液位开关,上下移动鼠标,液位开关可上下运动,用来处理不同的液位控制要求,液位开关的初始状态是上面为常闭触点下面为常开触点。
给进料泵电磁阀通电,进料泵开始进料,给出料泵电磁阀通电,出料泵开始出料。
混料泵为三相异步电动机,该电动机的连接方法已默认为星型连接,只需将三相电连接到三个接线柱即可。
通电后,混料泵开始搅拌。
实例:用PLC控制混料罐,示意图如下:1、控制过程有一混料罐装有二个进料泵控制二种液料的进罐,装有一个出料泵控制混合料出罐,另有一个混料泵用于搅拌液料,罐体上装有三个液位检测开关S1、S2、S3,分别送出罐内液位低、中、高的检测信号。
有一个混料配方选择开关SA1,用于选择配方1或配方2。
设有一个起动按钮SB1,当按动SB1后,混料罐就按给定的工艺流程开始运行。
设有一个停止按钮SB2作为流程的停运开关(其工作方式见考核要求3选定);循环选择开关SA2作为流程的连续循环与单次循环的选择开关。
2、混料罐的工艺流程3、工作方式由用户设定:(1)混料罐连续循环与单次循环可按SA2自锁按钮进行选择,当SA2为“0”时混料罐连续循环,当SA2为“1”时混料罐单次循环;(2)混料罐连续循环,按停止按钮SB2混料罐立即停止;当再按启动按钮SB1,混料罐继续运行;(3)连续作3次循环后自动停止,中途按停止按钮SB2混料罐完成一次循环后才能停止;构件:洗衣机实物图:接线图:使用说明:鼠标点击液位开关,上下移动鼠标,液位开关可上下运动,用来处理不同的液位控制要求,液位开关的初始状态是上面为常闭触点下面为常开触点。
给进水管电磁阀通电,进水管开始向洗衣机里注水。
给出水管电磁阀通电,出水管开始将洗衣机里的水放掉。
洗衣机的电动机为实例:PLC控制全自动洗衣机程序设计,控制要求如下:启动时,首先进水,到高水位时停止进水,开始洗涤。
正转洗涤10s,暂停5s后反转洗涤10s,暂停5s后正转洗涤,如此反复10次。
洗涤结束后,开始排水,当水位下降到低水位时,进行脱水(同时排水),脱水时间为20s。
这样完成一次洗涤,脱水完成后自动停机构件:带车灯的自动门实物图:接线图:使用说明:车灯按钮:按下车灯按钮,车灯会亮,可以用来触发车灯信号接收器。
车灯信号接收器:用来接收车灯信号,它的初始状态是上面为常闭触点,下面为常开触点。
超声波开关:红色区域为超声波的感应范围,当小车进入到这个范围,超声波开关被触发,常闭变常开,常开变常闭。
它的初始状态是上面为常闭触点,下面为常开触点。
光电开关:当有物体穿过开关,并遮住了光束,那么开关的状态常闭变常开,常开变常闭。
它的初始状态是上面为常闭触点,下面为常开触点。
门下限开关:当门下降,碰到它时,门下限开关会有动作,那么开关的状态常闭变常开,常开变常闭。
由于现在门是关闭的,因此它的初始状态是上面为常开触点,下面为常闭触点。
门上限开关:当门上升时,碰到它时,门上限开关会有动作,那么开关的状态常闭变常开,常开变常闭。
它的初始状态是上面为常闭触点,下面为常开触点。
门位电动机:采用直流驱动,按正负方向接入电源,电动机正转(门上升),反之,电动机反转(门下降)。
按键盘的方向键可控制小车前进和后退。
实例:用PLC控制车库门自动开闭控制电路,示意图如下。
控制要求:1、当车接近车库门的某个区域时,并且车灯亮3次后库门自动打开,车通过后,库门自动关闭,从而实现车库门的无人管理。
2、工作过程库门设计为卷帘式,用一个电机来拖动卷帘。
正转接触器KM1使电机开门,反转接触器KM2使电机关门。
在库门的上方装设一个超声波探测开关S01,在门上方装有接受车灯信号的开关S03,当来车进入超声波范围时,并且车灯亮3次后,启动接触器KM1,电机M正转使卷帘上升开门,开门必须开至上限位后再自动关门。
在库门的下方装设一套光电开关S02,用以检测是否有物体穿过库门。
若车遮断了光束,光电开关S02便检测到这一物体(由OFF变为ON),则立即停止关门并自动启动电机开门。
关门时若超声波开关探测有信号,则立即停止关门并自动启动电机开门。
用两个行程开关SQ1和SQ2来检测库门的开门上限和关门下限,用按钮SB1手动控制开门和SB2手动控制关门。
构件:道杆自动门实物图:接线图:使用说明:车灯按钮:按下车灯按钮,车灯会亮,可以用来触发车灯信号接收器。
车感检测传感器:用来接收车灯信号,它的初始状态是上面为常闭触点,下面为常开触点。
门下限开关:当门下降,碰到它时,门下限开关会有动作,那么开关的状态常闭变常开,常开变常闭。
由于现在门是关闭的,因此它的初始状态是上面为常开触点,下面为常闭触点。
门上限开关:当门上升时,碰到它时,门上限开关会有动作,那么开关的状态常闭变常开,常开变常闭。
它的初始状态是上面为常闭触点,下面为常开触点。
道杆下限开关:当道杆下降,碰到它时,道杆下限开关会有动作,那么开关的状态常闭变常开,常开变常闭。
由于现在门是关闭的,因此它的初始状态是上面为常开触点,下面为常闭触点。
道杆上限开关:当道杆上升时,碰到它时,道杆上限开关会有动作,那么开关的状态常闭变常开,常开变常闭。
它的初始状态是上面为常闭触点,下面为常开触点。
地磁检测传感器:用来检测某地表面是否有汽车通过,该模板的地磁检测传感器安装在道杆以及自动门之间。
当有汽车通过时,那么传感器的状态常闭变常开,常开变常闭。
它的初始状态是上面为常闭触点,下面为常开触点。
车位检测传感器:当汽车停到车位时,便可触发检测传感器,那么传感器的状态常闭变常开,常开变常闭。
它的初始状态是上面为常闭触点,下面为常开触点。
道杆电机:COM端为开端、关端的公共端。
当给开端和COM端通电时,道杆上升;当给关端和COM端通电时,道杆下降。
门位电机:采用直流驱动,按正负方向接入电源,电动机正转(门上升),反之,电动机反转(门下降)。
按键盘的方向键可控制小车前进和后退。