基于ARM7支持触摸屏和实时操作系统的开发与应用
基于ARM7实时网络的设计和实现

文 章 编 号 :6 3 1 3 ( 0 1 0 —0 60 17 — 1 1 2 1 )20 7 2 ( t en t E h r e)MAC、 AN、 速 ( 2 p )US . 。 它 针 对 C 全 1 Mb s B20
随 着 基 于 T /I 议 的 Itre CP P nen t网 络 技 术 的 日益
1 2 系 统 的 拓 扑 结 构 .
实 时 以 太 网 的拓 扑 结 构 与 以太 网相 同 。主 机 通 过 以太
网卡连到通 信 电缆 上 。通 信 电缆 可 以是 同轴 电缆 , 可 以 也
用非 屏 蔽 双 绞 线 。 如 果 是 非 屏 蔽 双 绞 线 , 需 要 用 HUB 则 。 对 于 原 有 独 立 呼 叫 中 心 平 台 的 职 能 局 , 工 商 、 管 如 城
2 1 年第 2 01 期 ( 第 l2期 ) 总 1
信 息 通 信
I (RM AT1 NF7 ) 0N & C ) M UNI (M CATI NS ( )
2 1 O1
( Sum .NO .1l 2)
基 于 ARM7实 时 网络 的设 计 和实 现
胡 博 韩 菲 帆 ,
系 结 构 , I Vi o 3的 RT 实 时库 等 。 最后 , 试 测 试 了 系统 并 分 析 了数 据 。 KE I u s n i L 调
关 键 词 : M 7 实 时 网络 ; 实 时 库 ; t I AR ; RTI TC P /
中图分类 号 : 33 TP 9
文 献标识码 : A
等, 可通 过 系 统开 放 式 接 口或 者 开发 标 准 化接 f , _ 使职 能 = l
局 呼 叫 中 心 系 统 与 1 3 5呼 叫 中 心 系 统 的 数 据 共 享 , 现 24 实 1 3 5呼 叫 中 心 业 务 子 系 统 转 办 来 电件 内 容 导 人 职 能 局 呼 24 叫 中 心 系 统 , 通 过 职 能 局 原 有 呼 叫 中 心 系统 处 理 回 复 。 再 只有 普 通 对 外 热 线 电 话 的 部 门 , 撤 消 原 有 电 话 号码 可
计算机三级嵌入式系统题库及解析第3套
计算机三级嵌入式系统题库及解析第3套一、选择题1: 与个人计算机(PC)相比,嵌入式系统具有许多不同的特点。
下面不属于嵌入式系统特点的是()。
A: 嵌入式系统与具体应用紧密结合,具有很强的专用性B: 嵌入式系统通常包含在非计算机设备(系统)中,具有隐蔽性C:嵌入式系统的软硬件资源往往受到严格的限制D:嵌入式系统性能较低,价格也比较便宜2: 嵌入式系统中的CPU具有一些与通用计算机所使用的CPU不同的特点,下面不是其特点的是()。
A: 支持实时处理B: 低功耗C:高主频D:集成了测试电路3: 嵌入式系统使用的片上系统英文缩写名为SoC,下面关于SoC叙述中错误的是()。
A:SoC也称为系统级芯片,它是电子设计自动化水平的提高和集成电路制造技术飞速发展的产物B:SoC芯片中既包含数字电路,也可以包含模拟电路,甚至还能包含数字/ 模拟混合电路和射频电路C:SoC将嵌入式系统的几乎全部功能都集成在一块芯片中,单个芯片就能实现数据的采集、转换、存储、处理和I/O 等多种功能D:SoC的设计制造难度很大,目前还没有得到广泛使用4: 微电子技术特别是集成电路制造技术是嵌入式系统发展的重要基础,下面关于集成电路的叙述中错误的是()。
A: 集成电路的集成度指的是单个集成电路所含电子元件(如晶体管、电阻、电容等)的数目多少B: 根据集成度的高低,集成电路可以分为小规模、中规模、大规模、超大规模和极大规模等几种C:嵌入式系统中使用的处理器芯片属于大规模集成电路D:集成电路的制造工艺复杂且技术难度非常高,许多工序必须在恒温、恒湿、超洁净的无尘厂房内完成5: 文字信息是人们用以表达和传递信息的媒体之一,大多数嵌入式系统都必须处理文字信息。
下面关于文字信息的表示及其处理的叙述中,错误的是()。
A: 目前使用最广泛的西文字符集是ASCII字符集,它包含96个可打印字符B:GB2312是我国目前广泛使用的汉字编码国家标准之一C:GB2312包括6000多汉字,但不包含西文、俄文等其他字符D:GB2312字符集中的汉字与符号在系统中采用双字节表示6: 假设一台数码相机一次可拍摄16位色1024 x 1024的彩色相片共80张,数据压缩比平均是4,则它使用的存储器容量大约是()。
基于ARM7支持触摸屏和实时操作系统的开发与应用

b 钩 子 函 数 : C/ ) OS I 为 了 —I
用 户 在 系 统 函 数 中 书 写 自 己 的
代 码 而 预 置 了 一 些 钩 子 函数 ( 如 OS i T cHo k ,这 些 函 数 在 移 植 Tme ik o ) 时 可 全 为 空 函 数 ,可 根 据 用 户 的 需 要
De i n I e s sg d a
责 任 编 辑 :韩 汝 水
基 于 ARM 7 持 触 摸 屏 和 实 时操 作 系 统 的 支 开 发 与应 用
De el v opmen d Appl at ou h n c e d R O S B ed on ARM 7 t an i i of c on T c i g S r en an T as
一
下 ,并 且 必 须 是 满 递 减 堆 栈 ,所 以 在
文 件 中 用 来 定 义 堆 栈 增 长 方 式 的 常 量
OS S K G O T 的 值 为 l T R W H : c 1需 对 外 部 函 数 声 明 : 如 在 “ OS I . 文 件 中 , 有 些 耍 C/ .Ih头 移 植 的 函 数 已 经 声 明 ,包 括 :
先 根据处理 器的结 构和特点确 定任务
的堆栈结构 :
步 增 强 了 AR 控 制 系 统 的 性 能 。 M
另 外 ,新 版 本 的  ̄ / — 已 经 通 过 了 L 0S一 嵌 入 式 操 作 系 统 的 移 植 c osI I L C, ¨
F A认 证 ,很 适 合 应 用 于 对 实 时 性 要 A
一
OS ak tli ) T sSknt 、OSnC xw(od 、 ( It tS vi) OStr g R yv i) Sat h d (od 。 Hi
ARM7_触摸屏设计
基于ARM7和VC平台的高分辨率红外触摸屏设计触摸屏是结合显示器使用的一种透明的绝对定位系统,透明和优良的定位原理是它的技术特征。
目前应用在各场合的触摸屏主要有四种:电阻式触摸屏、电容式触摸屏、表面声波触摸屏和红外触摸屏。
其中红外触摸屏的视觉效果和定位原理都优于其它触摸屏技术,而且不受电流、电压和静电干扰,可以适宜恶劣的环境条件。
但是,与其它三种触摸屏相比,红外触摸屏也存在分辨率低的问题,这一点严重影响了红外触摸屏的实际应用。
为此,本文采用ARM7和VC提出了一种高分辨率的红外触摸屏的实现方案。
该方法通过ARM7对接收管和发射管的控制,来实时采集与发射管一一对应的接收管的光通量,然后计算鼠标位置,最后通过VC编程来实现在Windows下的鼠标驱动。
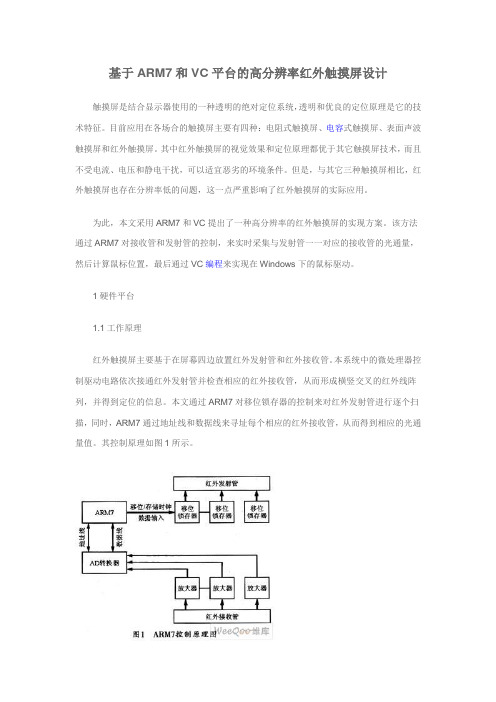
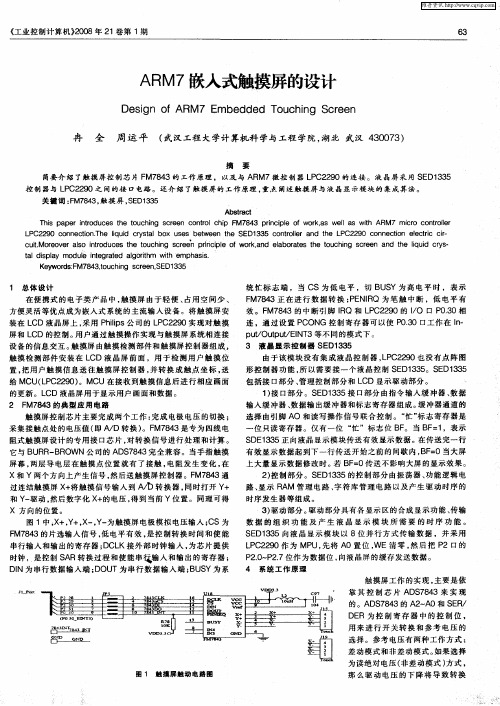
1硬件平台1.1工作原理红外触摸屏主要基于在屏幕四边放置红外发射管和红外接收管。
本系统中的微处理器控制驱动电路依次接通红外发射管并检查相应的红外接收管,从而形成横竖交叉的红外线阵列,并得到定位的信息。
本文通过ARM7对移位锁存器的控制来对红外发射管进行逐个扫描,同时,ARM7通过地址线和数据线来寻址每个相应的红外接收管,从而得到相应的光通量值。
其控制原理如图1所示。
本系统中的移位锁存器具有移位和存储两个时钟。
ARM7通过IO口控制移位锁存器的这两个时钟以及数据输入端。
通过数据输入端将一个脉冲写入移位寄存器后,在移位时钟的上升沿即可将写入的数据移人寄存器,并在存储时钟的上升沿将数据置入锁存器中。
利用移位锁存器的这一特点,可在移位时钟的上升沿将脉冲移至发射管,并在存储时钟的上升沿点亮发射管。
写入的脉冲会随移位时钟上升沿的到来不断的移位,直到从输出端移出。
将第一个移位锁存器的输出端与下一级的输入端相连,可将写入的脉冲移人下一级。
因此,通过移位锁存器的级联可实现ARM7对更多的发射管的驱动。
结合以上特点,即可将发射管逐个点亮。
在发射管被点亮的时刻,ARM7将通过地址线寻址与发射管位置上相对应的接收管,并将接收感应到的光通量通过放大器和AD转换器放大并转换成8位数据,再通过数据线传送给ARM7进行处理。
eCos在基于ARM7硬件平台上的应用

ecos 在基于AR M 7硬件平台上的应用北京航空航天大学钱问发满庆丰耿春明摘要简单介绍e Cos 的体系结构!详细论述e Cos 的可配置机制的实现原理!重点介绍e Cos 在以AT 9l M 55800为核心的AR M 7硬件平台上的移植步骤!结合本系统简要介绍内核的配置方法"最后给出了基于e Cos 应用软件的编写方法"关键词e Cos 可配置机制AR M 7移植硬件平台e Cos (Embedded Confi g urabl e O p erati n g S y st e m >最初是由C yg nus Sol uti ons 公司为面向嵌入式领域而开发的源码公开\具有很强的可移植性和可配置性的9适合于深度嵌入式开发的实时操作系统o 现在e Cos 主要由e Cos-Centri c 公司和e Cos 开源社区共同开发维护o e Cos 的特性9特别是它的可配置性9能有效缩短嵌入式产品的开发周期并降低成本o1eCos 的体系结构及可配置性1.1eCos 体系结构e Cos 采用模块化设计9将不同功能的软件分成不同的组件9使其分别位于系统的不同层次o 这种层次结构实现了e Cos 的可配置性\可移植性\兼容性和可扩展性o 图l 是e Cos 系统的层次结构框图o 硬件抽象层(HAL >使其上层次结构不必关心具体的硬件结构9因此只需对HAL 进行修改就可以使整个e Cos 的应用移植到新的硬件平台上o图1eCos 的层次结构框图内核是e Cos 的一个核心组件9也是系统的一个可选组件9一些较为复杂的应用需要内核的支持o 内核提供了多个可供选择的调度算法9可以很好地支持多任务处理o e Cos 内核提供了一组丰富的同步源语9完全能满足各种嵌入式应用的需求o 内核还负责对中断和例外进行处理9它的中断滞后处理机制保证了系统的实时性o 此外9内核还具有内存分配机制和定时机制9并提供多线程GDB 调试支持o 内核为上层软件和应用软件提供了丰富的AP I 接口函数oRedBoot 是一个无内核的系统引导程序9是e Cos 的一个特殊应用o RedBoot 可以加载e Cos 应用程序9并提供D ebu g 支持9是开发e Cos 系统时非常有用的工具o 设备驱动程序负责对硬件设备进行控制和管理9并完成设备数据的读/写操作o 设备驱动程序自身也采用层次结构9上层驱动程序(相当于一个虚设备>可以调用下层驱动程序(物理设备>o 驱动程序为上层软件提供标准的AP I 函数9应用程序可以使用这些AP I 函数对设备进行访问oe Cos 包含的网络支持包支持完整的TCP /I P 网络协议栈o e Cos 还提供了标准库(ANS I C 库和数学库>\兼容层(POS I X 兼容和uI TRON 兼容>\文件系统等o 作为一种开放软件9e Cos 还可以很方便地容纳第三方软件o1.2可配置性原理e Cos 的一个主要特性就是其可配置特性o 可配置性最终是靠代码中的条件编译来完成的9条件编译是编程语言的特点9并不是e Cos 的原创o 当一个软件工程中的条件编译项的数目和复杂性达到一定程度时9其中有一些条件编译项就会因为存在逻辑上的依赖关系而使条件编译产生冲突o 而如何发现并有效解决这种冲突才是e Cos 可配置性的特点9如图Z 所示9其可配置特性的实现主要由图2可配置机制组件定义语言CDL (C o m p onent D efi n iti on L an g ua g e )\组件仓库ecos .db \图形配置工具confi g too l 三者共同完成O!1"组件定义语言CDL CDL 是e Cos 组件框架中的一个关键部分9e Cos 所有模块的程序包中都包含一个CDL 脚本对该包进行描述并提供配置选项O 以本系统中的串口驱动程序包为例9在该包对应的CDL 中定义了一个名为CYGPKG _I O _SER I AL _AR M _AT 9l 的cdl _p acka g e O 在这个cdl _p acka g e 中详细列出了该包的一些属性9如该包必须在工程已经包含了硬件抽象层包CYGPKG _HAL _AR M _AT 9l 和上层串口I O 包CYGPKG _I O _SER I AL 的情况下才会被使能O 另外9串口的一些常用特性9如波特率\设备名\缓冲区大小等配置选项也是必不可少的O 在一些复杂的CDL 中还会包含对该包中的源程序进行编译时的一些编译选项O 在进行配置的时候9该包还会产生一个包含了各个可配置参数数值的头文件O 当其他包使用由CYGPKG _I O _SER I AL _AR M _AT 9l 包提供的可配置参数时9这个新产生的头文件就会被相关的源文件通过#i ncl ude 语法包含O !2"组件仓库ecos .dbecos .db 是一个包含了所有可用程序包和配置模版的文本文件O 在该文件中9需要注册所有的CDL 包O 在注册时以p acka g e 关键字提供相应包的名称\CDL 脚本文件的文件路径以及对该包的一个简单描述O 在ecos .db 中还会以tar g et 关键字生成配置模版9从而提供目标平台的一些基本组成结构9使目标平台包括所需要的已经注册了的CDL 配置包O !3"图形配置工具confi 9t oo lconfi g t ool 是利用MFC 编写的W i ndo Ws 程序9是e Cos 可配置性的执行者9也可以理解成是CDL 脚本的解释器O 一方面它读取ecos .db 文件中的目标平台和已注册的配置包信息9根据配置包的路径找到相应的CDL 脚本9然后根据脚本中给出的属性向程序员提供图形化的配置信息;另一方面9它还可以接受用户的输入9包括单选按钮\复选框\下拉列表\文本输入等O 当用户保存一个配置时9confi g t ool 会根据CDL 语言的提示生成相应的头文件9也会将指定的头文件从配置包中复制到配置文件所在的工作目录O 无论是生成的头文件还是拷贝的头文件9都会在编译时被源程序所引用O 对于内核源程序9confi g t ool 又可以理解成编译器O 当用户的配置选项被保存并且对工程进行编译时9confi g t ool 会在后台调用真正的编译器GCC 9根据配置包CDL 中的编译选项控制GCC 对所有需要的内核源文件进行编译并生成库文件和对应的链接脚本O 当然confi g t ool 只是对e Cos 内核进行编译9用户的应用程序只需在编译时和由confi g t ool 编译生成的库文件进行链接就可以得到最终的可执行映像文件O2系统硬件框架本系统是一个以AR M 7为核心构成的测控系统9通过对传感器的脉冲信号进行处理而得到待测物料的流量9并通过控制给料器的给料速度达到流量控制的目的O 对于一个有实用价值的测控系统9必须具有人机交互\闭环控制\数据通信和存储等功能O 本课题所研制的流量测控系统的硬件框图如图S 所示O图3流量测控系统硬件框图图S 中9处理器为AR M 7内核的工业级芯片AT 9l M 558009其强大的功能保证了系统的实时性和稳定性的要求O Z MB 的F l ash SST S9VFl 60用来保存程序代码\测量所需的一些参数以及测量结果的简单统计信息O 在工业生产中9经常需要对一次测量中的数据进行历史再现9以便对一些事故或故障进行排查O 本系统通过采用l MB 的大容量RA M 来实现这一功能C 除了用来作为程序运行时的内存外9RA M 还用来实时保存每一时刻的测量数据O USB 总线的通信口用来和现场计算机进行通信9以实现一些更加完善的处理9如数据打印\结果分析\实时数据的硬盘保存等O 分辨率为SZ 0>Z 40的LCD 用来作为系统的显示终端配合4>5的键盘来完成系统的人机交互操作O 对变频器的控制和对温度信号的采集通过485总线完成O 6路脉冲信号是本系统测量功能的核心9通过对这6路脉冲进行处理可以得到流量相关的所有信息O 4~Z 0mA 电流信号用来控制给料系统9以实现闭环控制O 由于在工业环境中使用9对于一些长线连接必须采取隔离措施O 本系统对测量脉冲\485通信信号和4~Z 0mA 电流信号都采取了光电隔离措施O3eCos 在系统上的移植与应用软件编写3.1eCos 内核的移植由于e Cos 内核采用了可配置的模块化设计思想9因此只要修改硬件抽象层HAL的代码和CDL脚本并且在ecos.db中注册就可以应用于新的目标系统HAL又可以细分为S个层次①体系结构抽象层e Cos是可以应用于多种体系结构平台上的操作系统如AR M M I PS PO WERPC等在e Cos发布时已经将这些体系结构层的移植包一同发布了出来本系统的体系结构抽象层是AR M7体系结构抽象层②变体抽象层对于同一种体系结构的处理器各生产厂家会有不同的系列和型号如A t m el的AT9l系列Phili p s的LPC系列等虽然它们都采用AR M7体系结构但是不同的寄存器配置模式和中断处理方法也会影响到e Cos的移植本系统所使用的处理器AT9l M55800使用较为普遍在e Cos开源社区已经有移植好的AT9l M55800变体抽象层的代码和CDL 脚本只需作系统启动后对I O口的赋值情况等少许的改动即可完成对变体抽象层的移植③平台抽象层平台抽象层是对目标系统的整个硬件平台进行抽象包括平台的启动芯片配置定时I O寄存器及中断寄存等等系统需要进行的移植工作主要是平台抽象层的移植而平台抽象层中最重要的是F l ash驱动包和内存布局文件的移植主要的步骤为①安装AT9l M55800变体抽象层包从e Cos开源社区下载好的变体抽象层包在一个名为eb55的文件夹中在这个文件夹中还有cdl i ncl ude src等子文件夹分别包含了CDL脚本头文件源文件由于e Cos的软件包有严格的层次结构所以在安装软件包时应遵循这一结构以便于维护AT9l M55800属于AR M7的一个变体同AT9l系列的其他CP U处于同一层次所以变体抽象层软件包文件夹eb55的具体路径应为hal ar m at9l eb55接下来还应在ecos.db中注册变体抽象层包以p acka g e 关键字注册名为CYGPKG_HAL_AR M_AT9l_EB55的包这个名字必须和包中CDL文件hal_ar m_at9l_eb55.cdl中的所定义的包名完全一致在包名后面的花括号中登记hal_ar m_at9l_eb55.cdl文件的路径及文件名以及对该包的简单文字说明②编写F l ash的底层驱动软件包以便能够操作目标系统的F l ash存储器由于本系统在前期调试和代码固化时利用了RedBoot而RedBoot通过F l ash驱动程序操作目标F l ash所以必须先移植好F l ash驱动程序才能进行更进一步的开发工作首先需要编写底层驱动程序源文件不同的F l ash 的块空间大小以及写操作一般是不一样的本系统所用的F l ash SST S9VFl60是Z MB的l6位NOR F l ash共有5l Z0XZ00个块空间其块大小为4K0Xl000写操作的命令码符合J EDEC标准这些特点与A t m el公司AT49系列F l ash比较类似因此F l ash驱动程序可以从e Cos发布时自带的AT49系列F l ash的驱动程序修改得到最重要的地方是修改描述F l ash特性的结构体fl ash_dev_i n-f o_t变量中成员bl ock_siZe和bl ock_count的值使其分别为0Xl000和0XZ00接下来需要编写与F l ash底层驱动对应CDL脚本使配置工具confi g t ool能够正确配置编译F l ash驱动程序这个CDL文件完全可以参照AT49驱动包中的CDL 文件编写以cdl_p acka g e关键字定义名为CYGPKG_DEVS_F l ash_SST_S9VFl60的包在命令体中给出具体的配置参数由于底层驱动包必须结合上层驱动才能工作所以在命令体中用acti ve_if CYGPKG_I O_F l ash命令告诉confi g t ool必须在上层驱动包CYGPKG_I O_F l ash 已经被包含的情况下底层驱动包才会使能最后需要在ecos.db中注册底层驱动软件包具体做法和变体抽象层包的注册方法相同③修改内存布局文件使confi g t ool能够正确定位程序在系统存储器中的位置e Cos提供S种不同的运行方式即ROM方式RA M方式ROMRA M方式每种模式都有两个相应的布局文件如RA M方式的m lt_ar m_at9l_eb55_ra m.l di和m lt_ar m_at9l_eb55_ra m.h%.l di 和常见的AR M开发环境ADS中scatt ered链接方式下的%.scf文件的作用类似即用来对不同段分别指定不同的链接地址在%.l di中需要修改ME MORY和SECT I ONS两部分对于代码在RA M中运行的内核及应用程序需要根据系统RA M的实际情况修改内存布局文件中相关参数的值本系统具有l MB的RA M但有一半用来存放测量数据根据系统实际的硬件情况其起始地址为0X0Z000000大小为0X80000所以这个内存块定义为ra m OR I G I N=0X0Z000000LENGTH= 0X80000处理器内部集成了8KB SRA M其起始地址为0大小为0XZ000所以这个内存块定义为sra m OR I G I N =0X00000000LENGTH=0XZ000这样系统的ME MO-RY部分就由名为ra m和sra m的两个内存块构成系统比较重要的两处SECT I ONS部分的修改为SECT I ON_fi Xed_vect ors sra m0XZ0L MA_E@_V MA和SEC-T I ON_r o m_vect ors ra m0X0Z008000L MA_E@_V MA第一处表示fi Xed_vect ors段分配在从0XZ0开始的sra m中且L MA_E@_V MA指定其加载地址等于虚拟地址由于RedBoot运行时需要占用从0X0Z000000开始的一定空间的RA M所以第二处使程序代码从0X0Z008000开始的ra m中运行%.l di文件修改完毕后需要相应地修改%.h文件中的宏如#defi ne CYG ME M_REG I ON_ra m0X0Z000000④在组件仓库ecos.db中为以关键字t ar g et添加名为F l o W55的新目标平台在这个目标平台中还必须用关键字p acka g es 包括AR M 7体系结构层包和AT 9l M 55800变体抽象层包,同时为了实现调试还必须包括串口驱动包和F l ash 驱动包及其上层驱动包 除了这些被包含的软件包外,根据不同的选择confi g t ool 还会为目标平台包添加一些默认的包,如内核包 数学库包等 另外,还应加入一些对该平台的简单描述3.2内核的配置移植完成以后,一个最基本的目标平台就产生了 在confi g t ool 中可以看到T e m p l at es 菜单的硬件平台列表中新增了F l o W55目标平台模版,以def ault 方式打开这个模版 各个软件包的CDL 脚本中都给出了默认的配置值,有些值需要根据具体的应用要求重新配置 本系统一些重要的配置情况如下①由于系统线程数量较少<小于l 0>,所以选择效率更高的位图调度器B it m a p schedul er ,并将线程数nu mbers of p ri orit y l evels 限定为l 6,以提高任务切换的速度 当点击位图调度器的单选按钮时,confi g t ool 会检测到一个配置冲突 由于时间片轮转是默认使能的,而时间片轮转仅仅对应于多级队列调度器,所以出现配置冲突 Confi g t ool 会给出一个推荐的解决冲突的方法,即禁止时间片轮转,按照这个推荐的解决方法可以安全地解决这个冲突 这个地方可以充分体现出e Cos 强大的可配置性②由于配合RedBoot 一起使用,所以内核配置为RA M 启动方式 这样,系统上电后程序将由RedBoot 复制到RA M 中运行,以提高速度③系统的晶振频率为l6MH Z ,经PLL 倍频后为SZ MH Z ,所以需将C lock s p eed 配置为SZ000000~RTC 是系统的时钟节拍发生器,本系统的时钟节拍时间选为Z0m s ,所以也需要对RTC 相关项进行配置 具体参数为R eal-ti m e clock nu m erator 配置为Z000000000,R eal-ti m e clock deno m i nator 配置为l00,R eal-ti m e clock p eri od 配置为Z0000其余的配置选项使用默认的配置值即可 完成配置工作后,对内核进行编译可以产生内核库文件和链接脚本以及相关头文件 这些生成的文件再同应用程序一起编译 链接,生成最终的可执行映像文件图4应用软件结构3.3基于eCos 操作系统的应用软件的编写e Cos 是一个单进程多线程的操作系统,多个线程在宏观上可以认为是并发运行的,而且各线程之间耦合低,便于软件的编写和维护 针对这一特点,本系统的软件结构如图4所示本系统主要有两种程序运行方式,分别称为方式A 和方式B 方式A 中,硬件中断产生后,相应的I SR <I n-t err u p t S er vi ce Routi ne >程序运行,由于I SR 中是禁止中断的,所以在I SR 中只进行最简单的操作,I SR 退出后内核调用相应的DSR <D ef erred S er vi ce Routi ne > DSR 中中断是使能的,所以可以进行一些稍复杂的处理,如简单的数据运算 内核调用<发送信号量和邮箱等> 在得到相应的信号量或消息邮箱后,相应的线程进入就绪态被内核调度运行 本系统中对键盘的处理就是基于这种方式 按键产生硬件中断 I SR 执行,接着在DSR 中进行相应的运算得到具体的键值后以消息邮箱的方式通知并唤醒键盘处理线程,键盘处理线程在完成任务后进入休眠直到再次有按键发生而被唤醒 方式B 中,各线程只是周期性地被内核调度运行,如测量数据显示线程,在显示一次数据后调用延时函数进入休眠,直到延时完毕后再次进入就绪态被内核调用根据测控系统的实际情况,具体的线程编写如下 方式A 为流量计算线程 温度测量线程 键盘处理线程 USB 通信处理线程 方式B 为测量数据显示和曲线绘制线程 流量控制线程 初始标定线程4结论经过实践,本系统运行稳定,实时性能良好 由于e Cos 的强大可配置性使得系统的软硬件可维护性强,在进行硬件改动或应用要求改动后可方便地进行升级参考文献l M assa A J .嵌入式可配置实时操作系统e Cos 软件开发M .颜若麟,等译.北京 北京航空航天大学出版社,Z 006. Z 蒋句平.嵌入式可配置实时操作系统e Cos 开发与应用 M .北京 机械工业出版社,Z 004.S 王京起,等.嵌入式可配置实时操作系统e COS 技术及实现机制 M .北京 电子工业出版社,Z 005.4 马忠梅,等.AT 9l 系列AR M 核微控制器结构与开发 M .北京 北京航空航天大学出版社,Z 00S .5 Red Hat I nc &e Cos Centric L t d .e Cos U ser s Gui de .Z 00S .6 聂慧萍.新型固体科里奥利流量计测控系统研究 D .北京 北京航空航天大学,Z 005.钱问发<硕士研究生> 主要研究方向为工业测控网络与嵌入式系统应用;满庆丰<教授>.耿春明<副教授> 主要研究方向为工业测控网络与现场总线.嵌入式系统应用等<收稿日期:Z 006-l l-l 5>。
基于ARM7的以太网实时语音录放系统

基于ARM7的以太网实时语音录放系统
沈阳
【期刊名称】《单片机与嵌入式系统应用》
【年(卷),期】2022(22)9
【摘要】设计了一种基于ARM7微控制器和以太网的实时语音录放系统。
在局域网中,上位机采用广播的方式向各个下位机发送ADPCM语音数据包,下位机对接收到的数据包进行ADPCM解码,以DMA方式通过I2S总线发送给UDA1341语音模块进行播放。
另外,可以将录制的PCM数据经过ADPCM压缩后上传至上位机进行保存。
除了上位机可以对下位机进行音量和均衡器的调节外,各个下位机也可以通过键盘进行个性化的控制,并且通过TFT彩色液晶显示播放的状态。
实验结果表明,本系统实现了局域网内的语音实时录放。
【总页数】5页(P79-83)
【作者】沈阳
【作者单位】浙江海利普电子科技有限公司
【正文语种】中文
【中图分类】TP31
【相关文献】
1.基于LabVIEW的ISD语音芯片录放系统
2.基于Arduino Mega2560平台的无线语音录放系统的设计
3.基于ARM7的以太网监控系统在水产养殖中的应用
4.基于单片机的语音录放系统设计
5.基于以太网传输的语音录放存储系统
因版权原因,仅展示原文概要,查看原文内容请购买。
实时操作系统Toppers在ARM7上移植的研究
l 概 述
随着信息化技术 的迅速发展 ,嵌入式系统 已广 泛应 用于 通信、网络、工控 等技术领域 ,它 以应用为 中心、软硬件可 裁减 ,适应应用系统对功能、可靠性 、成本、体积、功耗等
综合性严格要求的专 用计算机系统。 嵌入式系统的实时性 J 是指系统能够在限定的时间内完成任务并对外部的异步事件 作 出及时响应 。绝大多数嵌 入式应用对系统 的实时性有很高 的要求 。嵌入式微处理器和嵌 入式操作 系统是构成一个嵌入 式系统 的硬件和软件核 心。 M 微 处理器具有性能高、成本 AR 低和能耗省 的特点 ,T p es是一个开放源代码 的嵌入式实 opr
内核 ,移植到嵌入式微控制器 A M7S C 4 0 。 方法能解 决系统启 动和加载过程 中的特定工作状态等问题 ,明确 T p e / p R (3 4 B ) 该 o pr a 内核在移 ss 植过程中的重点和难点。经多任 务运行结果表 明,T p es o p r 嵌入式实时操作系统稳 定可靠 。
时操作系统 。本文在 A M R 7处理器模块 上移植 T p es嵌 o pr 入式实 时操作 系统 ,解 决了 系统启动 和加载过 程 中的关键
问题 。
圈 围 困 圈 叵 臣 [二 [二 ]
化 ,以及进行任务切换的调度器 。
圈 圈 圈 圈
圈 1 T p es s o p r/ p内棱结构 a
T i p p r r p s s eme o f o t go e uc T o p r/s noAR ( 3 4 0 . h c p lr c o o t l r e iae hs a e o o e t d o r n p n s r e OST p es po t M7 S C4 B ) w ihi a p h t h p i o R a s p u a r c nr l d c t t o mi oe d do
基于ARM嵌入式系统的触摸屏驱动程序开发
西安文理学院机械电子工程系本科毕业设计(论文)题目基于ARM嵌入式系统的触摸屏驱动程序开发专业班级_________ 学号 _______________________________学生姓名 ______________________________________ 指导教师 ______________________________________ 设计所在单位 _________ 自动化__________________2012年5月西安文理学院本科毕业设计(论文)评阅教师评分表西安文理学院本科毕业设计(论文)答辩记录2、答辩委员会认左成绩是根据该生毕业设计期间的表现及该专业整体论文情况的综合评定成绩。
3.论文等级分优秀($90分)、良好(80-89分人中等(70-79分)、及格(60~69分)、不及格(<60分)。
基于ARM嵌入式系统的触摸屏驱动程序开发摘要:随着多媒体信息的与日俱增,传统的人机交互的速度已经不能满足需求,传统的人机交流是通过键盘或鼠标来实现的。
信息交换的速度比较慢,而且要求操作者具有一定的专业知识。
这将使信息交流的L1的大打折扣。
触摸屏因方便灵活、节省空间、直观等特点,作为嵌入式系统的输入设备,已取代键盘,越来越受到各种终端产品商的重视。
基于Linux的嵌入式系统目前获得到了广泛应用,在嵌入式Linux核心层的开发中,设备驱动分为字符设备、块设备和网络接口设备,触摸屏驱动属于字符设备, 但它也可以被纳入input输入子系统的框架下。
通过毕业设计的驱动程序开发,也希望能对国家在这方面的发展做出自己的一点贡献。
本论文介绍了触摸屏的分类和原理,接着概要介绍嵌入式系统的相关原理理论,然后详细介绍了整个系统的开发环境,最后对整个触摸屏驱动系统进行了分析,讨论了系统具体实现。
关键词:Linux操作系统;触摸屏;程序开发;交义编译;NFSDevelopment of touch screens driver based on ARM embeddedsystemAbstract :With the increasing of the required informationJouch screen has impact on more and more peopled daily life,touch screen is not only easy to operate.but also has the performances of durable,fast reaction speed and friendly HMI(man-machine interaction).Now,embedded system has been applied widely.in the development of embedded kernenHie development of the device driver occupy most of the workload.it isn't easy to develop good driver.ThereforeJ can master the framework and development process by completing the development of touch screen base on ARM embedded system.This paper introduces the classification of touch screen drivers and principle.Then.an overview of the relevant principles of embedded sytems theory,and then details the development environment of the system..FinallyJhe touch screen driver are analyzed to discuss the system iniplemenation・Keywords:Linux perating system;Touch screen;Driver development;Cross compiIing;NFS目录目录1绪论1」设计目的 (1)1.2设计环境 (1)1.3设计总体要求 (1)2方案设计2」系统硬件平台 (2)2丄1 ADC和触摸屏接口介绍 (2)2.1.2电阻式触摸屏的工作原理 (5)2.2系统软件平台 (7)2.2.1软件简介 (7)2.2.2软件基本操作 (7)223嵌入式驱动程序基础 (8)3嵌入式系统开发环境的搭建3」建立交叉编译环境 (9)3.2配置超级终端 (9)3.3配置网络文件系统NFS服务 (10)4嵌入式设备驱动程序开发4」编写触摸屏设备驱动程序 (11)4.1.1 Linux输入子系统介绍 (11)4.1.2驱动程序的实现原理和步骤 (12)4.2运行程序 (12)4.3.1 烧耳程疗: . (13)5结束语 (14)致谢 (15)参考文献 (16)附录A驱动源程序 (17)附录B英文资料 (22)附录C英文资料翻译........................................................... -31第一章绪论1.1毕业设计目的随着多媒体信息的与曰俱增,传统的人机交互的速度已经不能满足需求,传统的人机交流是通过键盘或鼠标来实现的。
ARM7嵌入式触摸屏的设计
连 ,通 过 设 置 P ON 控 制 寄存 器可 以使 P 、0口工 作 在 I- C G 03 n
I tOu p t EN 3等 不 同 的模 式 下 。 p / t u/ I T u 3 液 晶 显 示 控 制器 S D1 3 E 35
触 摸 检 测 部 件 安 装 在 L 液 晶 屏 前 面 ,用 于 检 测 用 户 触 摸 位 CD 置 , 用户触摸信息送往触摸屏控制器 , 转换成触 点坐标 , 把 并 送 给 MCU(P 2 O 。MC 在 接 收 到触 摸 信 息 后 进 行 相 应 画 面 L C2 9 ) U 的更 新 。L CD液 晶 屏用 于显 示 用 户 画 面和 数 据 。
关键 词 : M 8 3 触 摸 屏 , E 1 3 F 74 , S D35
Absr t tac
Ths ape it i p r nr odu es t e o hn s e n r c i FM7 4 c h tuc ig cren co tol hp 8 3 p icpl o wor as rn i e f k. wel as t ARM 7 l wih mir c tol co onr l er L C2 O o e inTh l i c y t bo u e bewe n he SED1 3 c tol r nd h LP 2 nn c i el ti ci P 29 c nn ct . e i d r sal x s s o qu t e t 3 5 on r l a te e C2 90 co e t on ecrc r — cutM oeo eralo ito l 。 r v s n rduc s t e t u ig c e pr ci e o r .n el r ts t e t u ig c e an te i i c s e h o chn s r en i pl f wo ka d abo ae h o chn s r en n d h l d r — qu y t l iply a ds a mo e n e a e al r h wi m ph si。 dul it grt d go i m t e t h a s Ke wors: y d FM78 3. c n s e , 4 t hig crenSED1 3 ou 3 5
基于ARM开发的人机交互界面HMI
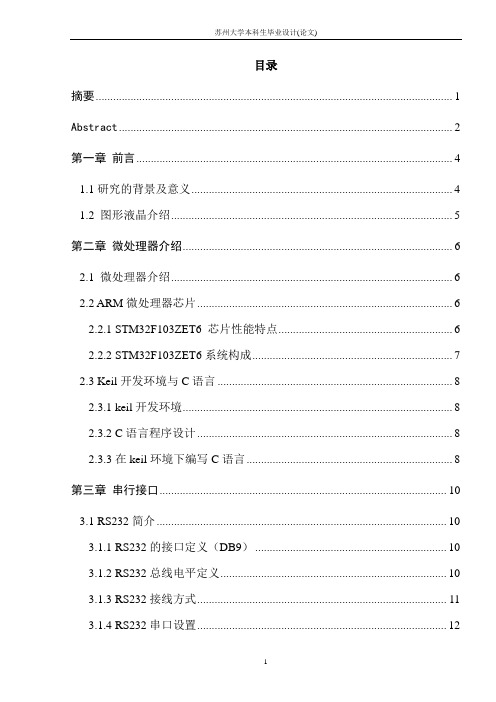
目录摘要 (1)Abstract (2)第一章前言 (4)1.1研究的背景及意义 (4)1.2 图形液晶介绍 (5)第二章微处理器介绍 (6)2.1 微处理器介绍 (6)2.2 ARM微处理器芯片 (6)2.2.1 STM32F103ZET6 芯片性能特点 (6)2.2.2 STM32F103ZET6系统构成 (7)2.3 Keil开发环境与C语言 (8)2.3.1 keil开发环境 (8)2.3.2 C语言程序设计 (8)2.3.3在keil环境下编写C语言 (8)第三章串行接口 (10)3.1 RS232简介 (10)3.1.1 RS232的接口定义(DB9) (10)3.1.2 RS232总线电平定义 (10)3.1.3 RS232接线方式 (11)3.1.4 RS232串口设置 (12)3.2 RS485介绍 (12)3.2.1 RS485性能特点 (12)3.2.2 RS485 接口 (12)第四章迪文液晶应用设计 (14)4.1 文本、曲线、图片、图标和动画的显示方法 (14)4.1.1 文本显示方法 (14)4.1.2液晶屏中曲线的显示方法 (15)4.1.3液晶屏中图片、图标和动画的显示方法 (16)4.2 系统配置和外设 (18)4.3 触摸屏界面功能的实现 (20)4.3.1 触摸屏原理 (20)4.3.2触控界面的设计 (21)4.3.3触摸屏功能的实现 (21)4.4 产品设计 (24)第五章结论 (27)参考文献 (28)致谢 (29)摘要串口HMI 的诞生,彻底将用户控制和显示部分分离出来。
用户无需更改自己的核心控制代码,只需增加串口发送接收函数,即可让自己的产品快速升级到真彩屏时代。
它实现信息的内部形式与人类可以接受形式之间的转换。
凡参与人机信息交流的领域都存在着人机界面。
串口型HMI 是集GUI、图片下载、触摸、存储及显示于一体的人机界面。
用户利用八位单片机串口就可以轻松控制文字、图片、声音及动画显示。
Chap3ARM7体系结构
Chap3 ARM7体系结构1. 引言ARM7是一种32位的精简指令集计算机〔RISC〕体系结构。
它由ARM公司开发,并在许多嵌入式系统中广泛应用。
本文将介绍ARM7体系结构的根本原理和关键特征。
2. ARM7体系结构概述ARM7体系结构是一种经典的三级流水线结构,它包括指令获取、指令解码和执行三个关键阶段。
下面将详细介绍每个阶段的功能。
2.1. 指令获取阶段在指令获取阶段,ARM7从程序存储器中获取指令并将其送入指令缓存。
ARM7采用哈佛结构,即指令和数据存储器分开独立访问。
指令获取阶段还包括对指令的对齐和译码操作,以确保指令的正确执行。
2.2. 指令解码阶段在指令解码阶段,ARM7对从指令缓存中获取的指令进行解码,并将解码后的指令发送到执行阶段。
指令解码的目标是将指令转换为控制信号,以控制ARM7处理器的各个功能单元。
2.3. 执行阶段在执行阶段,ARM7根据解码后的指令执行相关操作。
ARM7的执行阶段是高度灵巧的,它可以执行多种类型的指令,包括数据操作、算术逻辑操作、控制转移和访存操作等。
3. ARM7体系结构的特点ARM7体系结构具有以下几个关键特点:3.1. 强大的性能ARM7体系结构采用了流水线技术和多发射技术,在单个时钟周期内可以执行多条指令。
这使得ARM7能够实现较高的性能和较低的延迟。
3.2. 灵巧的指令集ARM7的指令集非常灵巧,可以满足不同应用场景的需求。
ARM7指令集包括数据处理指令、访存指令、分支指令等多种类型,使得程序员能够编写高效率、简洁的代码。
3.3. 低功耗设计ARM7体系结构采用了低功耗设计,可以在嵌入式系统中实现低能耗运行。
ARM7处理器的核心局部由许多低功耗逻辑单元组成,这些单元可以根据需要自动调整电压和频率,以降低功耗。
4. ARM7体系结构的应用ARM7体系结构在各种嵌入式系统中得到了广泛应用,其中包括智能手机、平板电脑、物联网设备等。
ARM7处理器具有较小的面积和功耗,这使得它非常适合嵌入式系统的需求。
ARM7_ADC和触摸屏驱动
• 在常见的设计中,如6410开发板,一般AIN4、 AIN5、AIN6、AIN7被用作了四线电阻触摸的YM、 YP、XM、XP通道;剩余的AIN0-3被引出,其中 AIN0直接和一个可调电阻W1连接
ADC接口电路
ADC工作原理
• • • • (1)可调电阻接到ADC输入AIN0 (2)调节可调电阻,改变模拟电压输入值 (3)启动ADC转换 (4)ADC转换结束后,读取转换值,获得转 换结果:很高。来自模拟信号->数字信号
模拟信号->数字信号
ADC&DAC
• ADC(Analog to Digital Converter)模/数转换器: 一种将模拟信号转换成数字信号的装置 • DAC(Digital to Analog Converter)数/模转换器:
一种将数字信号转换成模拟信号的装置
A/D转换器
• A/D转换接口电路
– A/D转换接口电路是嵌入式应用系统中前向通道的一个重 要环节 – 转换得到的数字量通常要经过微控制器进一步处理 A/D转换的一般步骤:
S3C6410的ADC
ADC内部原理图
S3C6410的ADC
• S3C6410芯片内部的ADC (模数转换器)
– 共有8路A/D转换通道:AIN0-AIN7 – 10/12位转换精度:10位转换后的值为0~1023 – 最大转换率在2.5MHZ转换时钟下能达到500KSPS(每秒 采样500千次)
精度
频率
通道
1、初始化
• 设置转换时钟与延时
时钟选择
等待转换延时
2、启动ADC
启动
3.1、等待ADC完成(轮询)
完成
3.2 等待ADC完成(中断)
• 63号中断
基于ARM7 LPC2210的触摸屏触摸点数据采集系统设计

基于ARM7 LPC2210的触摸屏触摸点数据采集系统
设计
本文提出了基于ARM7系列LPC2210微控制器和嵌入式操作系统
μC/OSII来实现触摸屏触摸点数据采集系统的设计,并完成了微控制器与上位机之间的物理层电路转换,实现了基于LIN总线的数据通信,能够在上位机得到触摸点的精确坐标以及控制菜单信息,并且准确可靠、传输速率高。
嵌入式系统实际上是嵌入式计算机系统的简称,是相对于通用计算机系统而言的,根据应用的要求,将操作系统和功能软件集成于计算机硬件系统中,以应用为中心,计算机技术为基础,实现软件与硬件的一体化。
其适用于对功能、可靠性、成本、体积和功耗等有严格要求的专用计算机系统。
触摸屏又称为触控屏、触控面板,是一种附加在显示器表面的透明介质。
触摸屏作为一种新的输入设备,是目前最简单、方便、自然的一种人机交互方式。
通过使用者的手指触摸,该介质实现对计算机的操作定位,大大简化了计算机的输入方式,实现零距离操作。
而在触摸屏的使用中,对触摸点的精确定位至关重要,本文提出了一种触摸屏的坐标算法,该算法具有良好的可移植性和扩展性。
arm7应用

本学期我们开设了arm嵌入式系统这门课程。
通过一学期的学习及所做的相关实验应用,收获还是很大的,现在我就对本门课程进行下总结以及自己的学习心得。
上学期我们开设了单片机的开发及应用,当时学习的芯片是At89c51单片机,通过一学期的学习我基本上掌握了89c51的结构原理,并且通过对汇编语言的学习及应用,最终自己能够设计一些简单的电路设计已完成简单的电气控制。
学期末电子实习就设计并制作了简单的红绿交通灯电路。
这学期我们开设的嵌入式开发系统主要讲解的是arm9的开发及应用。
相对于at89c51来说arm的应用就要广泛很多。
例如在手机及PDA系统开发应用方面,如比较流行的Windows CE、Symbian OS、Linux等。
在其他方面的应用也是十分的广泛。
下面是一个arm的应用实例:本系统设计一种基于ARM7处理器以及利用GPRS技术的路灯监控通信系统的终端,实现远程无线的各路现场数据的传输。
结合上位机软件,将各路数据实时传递到集中监控中心,以实现对路灯运行情况的统一监控和分布式管理。
系统结构模型图如图1所示。
图1 GPRS路灯监控通信系统模型图1 主要芯片简介1.1 LPC2106芯片[2]LPC2106处理器是菲利普公司的ARM7TDMI-S 处理器,该芯片带有一个支持实时仿真和跟踪的ARM7TDMI-SCPU,并嵌入了128KB的高速Flash存储器。
具有ISP 和IAP 功能,128位的储存器接口和特别的允许在最高时钟周期执行32位代码的加速体系,在代码长度起关键作用的程序中,可选的16位的Thumb模式在最少的代价下能够减少了超过30%的代码,CPU操作频率可达60MHz ;LPC2106体积很小,它有两个低功耗模式:空闲和掉电,使系统保证在低功耗使用,非常省电,在路灯监控系统中,它是非常理想的选择。
它内部RAM达到64K大小,提供I2C 串行和SPI 串行接口等接口,使得LPC2106在GPRS 系统中能够进行各种扩充;它的两个定时器,分别具有4 路捕获/比较通道,适合路灯控制多路数据处理,看门狗定时器确保了系统的安全,双电源技术保证了系统的可靠性。
Arm7软硬件开发工具

一、引言作为SOC(System On Chip)的典型应用,和持电话、机顶盒、数码像机、GPS、个为数字助理以及因特网设备等产品的市场需求越来越大。
目前,基于arm 的处理器以其高速度、低功耗等诸多优异的性能而成为上述各类产品中选用较多的处理器。
二、arm内核ARM内核分为ARM7、ARM9、ARM10以及Strongarm等几类。
其中每一类又根据其各自包含的功能模块而分成多种构成(见表1)在arm内核中有四个功能模块可供生产厂商根据不同用户的不同要求来配置生产。
这四个模块分别用T、D、M和I来表示。
T:表示Thumb,该内核可从16位指令集扩充到32位arm指令集。
D:表示Debug,该内核中放置了用于调试的结构,通常它为一个边界扫描链JTAG,可使CPU进入调试模式,从而可方便地进行断点设置、单步调试。
M:表示Multiplier,是8位乘法器。
I:表示EmbeddedICE Logic,用于实现断点观测及变量观测的逻辑电路部分,其中的TAP控制器可接入到边界扫描链。
arm7ARM7采用ARMV4T(Newman)结构,分为三级流水,空间统一的指令与数据Cache,平均功耗为0.6mW/MHz,时钟速度为66MHz,每条指令平均执行1.9个时钟周期。
其中的ARM710,ARM720和ARM740为内带Cache 的arm核。
arm9ARM9采用ARMV4T(Harvard)结构,五级流水处理以及分离的Cache结构,平均功耗为0.7mW/MHz。
时钟速度为120MHz-200MHz,每条指令平均执行1.5个时钟周期。
与ARM7系列相似,其中的ARM920、ARM940和arm9E 为含Cache的CPU核。
性能为132MIPS(120MHz时钟,3.3V供)或220MIPS (200MHz时钟)。
arm10ARM10采用ARMV5T结构,六级流水处理,指令与数据分离的Cache结构。
平均功耗为1000mW,时钟速度为300MHz,每条指令平均执行1.2个周期,其中arm1020为带Cache的版本。
基于ARM7微处理器控制的液晶显示技术

基于ARM7微处理器控制的液晶显示技术
刘毅;罗丽萍;方安安
【期刊名称】《南昌大学学报(工科版)》
【年(卷),期】2008(030)004
【摘要】构建了ARM微处理器LPC2134与YM19264C的硬件平台.对在嵌入式实时操作系统μC/OS-Ⅱ中显示模块的设计思路进行了详细分析,并且针对程序中可能隐含的风险提出了解决方案.基于μC/OS-Ⅱ编程环境进行了菜单设计,并使用消息队列进行画面更新,以完成人机交互的目的.对液晶显示模块LCM在嵌入式系统中的设计与应用具有参考价值.
【总页数】4页(P377-380)
【作者】刘毅;罗丽萍;方安安
【作者单位】南昌大学,机电工程学院,江西,南昌,330031;南昌大学,机电工程学院,江西,南昌,330031;南昌大学,信息工程学院,江西,南昌,330031
【正文语种】中文
【中图分类】TP334
【相关文献】
1.基于ARM7内核微处理器的嵌入式USB数据采集模块 [J], 鲍玉军;葛康杰;赵梦婷
2.基于ARM7微处理器的中文液晶显示技术 [J], 苏少钰;左兵城;姜建芳
3.基于ARM7微处理器的风光互补发电系统集中监控装置的研发 [J], 董湛波;瞿婷婷;向文国
4.基于ARM7微处理器的Modbus通信的实现 [J], 吕国华;程广河;房立镇
5.基于ARM7嵌入式微处理器无线家庭网关的研究与实现 [J], 蒋益锋;楼竞;胡琳娜
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM7系列处理器的高性能数据采集系统开发探索方案
基于ARM7系列处理器的高性能数据采集系统开发探索方案在一些工业现场中,设备长时间运行容易出现故障,为了监控这些设备,通常利用数据采集装置采集他们运行时的数据并送给PC 机,通过运行在PC机上的特定软件对这些数据进行分析,以此判断当前运行设备的状况,进而采取相应措施。
当前常用的数据采集装置,在其系统软件设计中,多采用单任务顺序机制。
这样就存在系统安全性差的问题。
这对于稳定性、实时性要求很高的数据采集装置来说是不允许的,因此有必要引入嵌入式操作系统。
笔者以μC/OSII 为操作系统平台,基于ARM7 系列处理器,对一种高性能的数据采集系统开发进行了探索。
1μC/OSII 嵌入式操作系统简介嵌入式操作系统μC/OSII(microcontroller operating system)是专为微控制器系统和软件开发而设计的公开源代码的抢占式实时多任务操作系统内核,是一段微控制器启动后首先执行的背景程序,作为整个系统的框架贯穿系统运行的始终。
对于对实时性和稳定性要求很高的数据采集系统来说,引入μC/OSII 无疑将大大改善其性能。
μC/OSII 的特点可以概括为以下几个方面:公开源代码,代码结构清晰、明了,注释详尽,组织有条理,可移植性好,可裁剪,可固化。
内核属于抢占式,最多可以管理60 个任务。
μC/OSII 自1992 年的第一版(μC/OS)以来已经有好几百个应用,是一个经实践证明好用且稳定可靠的内核。
目前国内对μC/OSII 的研究和应用都很多。
2 系统基本工作原理应用时,数据采集系统置于被监控的设备处,通过传感器对设备的电压或者。
基于ARM7嵌入式触摸屏设计
基于ARM7嵌入式触摸屏设计
杨亮;谭南林;苏树强;李响
【期刊名称】《国外电子测量技术》
【年(卷),期】2006(25)8
【摘要】本文介绍基于ARM7单片机的触摸屏及液晶屏工作原理、硬件结构和软件程序流程。
实现用触摸屏控制液晶屏的功能。
重点阐述触摸屏、液晶屏和LCP2294各个模块的作用,以及三个模块之间的工作过程。
触摸屏采用ADS7843控制器,液晶屏采用SED1335控制器与LPC2294之间的接口电路。
另外还简要介绍了LPC2294与打印机的连接以及液晶屏、触摸屏的软件设计和软件流程图。
【总页数】3页(P17-19)
【关键词】LPC2294;液晶屏;触摸屏;ADS7843
【作者】杨亮;谭南林;苏树强;李响
【作者单位】北京交通大学机械电子控制工程学院
【正文语种】中文
【中图分类】TN792;TP311.1
【相关文献】
1.基于ARM7嵌入式系统中触摸屏的设计和研究 [J], 盛占石;王楚华;周新云;孙俊
2.基于ARM7和VC平台的高分辨率红外触摸屏设计 [J], 张宏伟;黄子强
3.基于ARM7的嵌入式系统虚拟实验平台的设计 [J], 王娟
4.ARM7嵌入式触摸屏的设计 [J], 冉全;周运平
5.基于XR234Q电子鼻和嵌入式ARM7的农田精准灌溉系统设计 [J], 郭猛;闫洪亮
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM微处理器的触摸屏控制器设计及实现
基于ARM微处理器的触摸屏控制器设计及实现曾小波;黄建华;李竞雄【摘要】针对当前液晶触摸屏系统屏幕尺寸大、操作简便、应用广泛的主流发展方向.提出采用ARM9处理器作为核心器件,ADS7846为触摸屏控制器和6.5寸背光源四线电阻式TFT-LCD面板构成触摸屏系统的方案.阐明了系统的总体方案,硬件组成及各部件的工作原理分析,器件的选型.阐述了ARM-Linux系统的软件应用模型及部分控制程序的实现.产品经过调试后能良好的显示,通过加载QT编写的应用程序可以较好的通过触摸屏来进行操作,达到了预期的设计要求.具有较高的实际应用价值.【期刊名称】《湖南工程学院学报(自然科学版)》【年(卷),期】2015(025)001【总页数】4页(P37-40)【关键词】微处理器;SPI;ARM9;触摸屏;控制器【作者】曾小波;黄建华;李竞雄【作者单位】湖南理工职业技术学院,湘潭411104;湖南理工职业技术学院,湘潭411104;上海德意达电子电器设备有限公司,上海201203【正文语种】中文【中图分类】TP302;TP391触摸屏由于轻便、占用空间少、灵活等优点,已经逐渐取代键盘,成为嵌入式系统中最简单、方便和自然的一种人机交互方式[1].基于控制器和液晶显示的接口技术在日常生活、工业控制、智能家电等领域得到越来越广泛的应用.使用LCD触摸屏作为工业设备的输入输出设备既能达到可视化的要求,方便现场操作,又能降低微计算机信息产品的成本[2].ARM处理器经过多年的发展,速度越来越快,功能越来越强,应用领域也越来越广.液晶触摸屏系统主要由TFT液晶屏模块、触摸屏和ARM微处理器组成.本文提出采用以ARM9作为处理器,背光源TFT-LCD薄膜晶体管型液晶显示屏模块及相关接口电路组成的液晶屏显示屏设计方案.控制处理器采用ATMEL公司的ARM9处理器AT91SAM9261为CPU;触摸屏控制器选用BB公司的ADS7846;触摸屏TFT-LCD面板选用三菱公司的6.5寸LED背光工业级AA065VD01型号宽屏高亮液晶屏,分辨率高达640*480;操作系统采用LINUX来驱动控制显示屏,并使用QT编写应用程序.该方案经过测试和实践,硬件、软件均达到了设计要求,同时具有稳定性好,可移植性强,并可根据所处环境光线强度自动调节液晶屏显示亮度等优点.如图1所示,处理器部分以ARM微处理器为核心,包括处理器的外部总线接口控制器、LCD控制模器、A/D输入、SPI接口、UART接口、GPIO等外围电路构成.处理器AT91SAM9261为Atmel公司生产的以ARM926EJ-S ARM Thumb处理器为核心的具有完全片上系统(SOC)的处理器,并且扩展了DSP指令集和Jazelle Java加速器;主时钟频率为190 MHz时性能高达210 MIPS;且AT91SAM9261处理器是带有LCD显示应用并优化的主机处理器,集成LCD控制器支持BW能达到16 M色彩,以及主动和被动LCD显示,能将LCD刷新对整体处理器性能上的影响减到最小.触摸屏部分由触摸传感部件和触摸屏控制器ADS7846组成,触摸传感部件是安装在LCD液晶屏前面,用于检测用户触摸位置并将用户触摸信息送往ADS7846的传感部件[3].触摸屏控制器ADS7846是BB公司生产的四线电阻触摸屏转换接口芯片,是一款具有同步串行接口的12位取样模数转换器.完成触摸传感部件发送来的位置信息的A/D转换工作和微处理器发送的控制命令.存储设备主要包括128 MB的SDRAM,64 MB的NAND Flash和4 MB的NOR Flash,构成大容量存储系统为复杂多变的人机交互和大量数据分析为基础的工业控制提供存储保障;人机交互模块包括多个子模块,其中USB主控制器可以连接USB鼠标、键盘等输入设备.2.1 触摸屏控制器工作原理按照触摸屏技术原理上分为五个基本种类:矢量压力传感技术触摸屏、电阻技术触摸屏、电容技术触摸屏、红外线技术触摸屏、表面声波技术触摸屏,其中最常见的是电阻式触摸屏.电阻式触摸屏的主要部分是一块与显示器表面非常配合的复合电阻薄膜,以一层玻璃或硬塑料平板作为基层,表面涂有一层透明氧化金属(透明的导电电阻)导电层,上面再盖有一层外表面硬化处理的光滑防擦塑料层,内表面也涂有一层涂层在他们之间有许多细小的(小于1/1000英寸)的透明隔离点把两层导电层隔开绝缘,当手指触摸屏幕时,两层导电层在触摸点位置就有了接触,电阻发生变化,在X和Y两个方向上产生信号,送到触摸屏控制器,控制器侦测到接触信号并进行A/D转换确定接触点的坐标(X,Y).触摸屏控制器ADS7846是BB公司生产的四线电阻触摸屏转换接口芯片,是一款具有同步串行接口的12位取样模数转换器,工作电压在2.2 ~5.25 V之间,功耗小于0.75 mW.由于AT91SAM9261芯片集成了同步串行外部接口SPI,故可设计AD7846与ARM芯片AT91SAM9261的连接图如图2所示,图中ADS7846 的X+、Y+、X-、Y-是4线制触摸屏模拟信号输入端, DCLK是外部时钟输入;CS是片选端;DIN是串行输入,控制数据通过该引脚输入;DOUT是串行数据输出,用于输出转换后的触摸位置数据,最大数为二进制的4095;IN3、IN4是辅助输入;PENIRQ是PEN中断引脚,当按下触摸屏时,ADS7846向AT91SAM926发中断请求,AT91SAM926的GPF5在下降沿触发的情况下检测PENIRQ是否为低电平,若为低电平则认为有按下触摸屏,否则认为没有接触到[4],实现微处理器的SPI接口和ADS7846进行通信目的.图3为ADS7846的工作时序图.此图说明标准的一次A/D转换需要24个时钟周期,从AT91SAM9261的MOSI口向ADS7846的DIN发送控制字,当ADS7846接收到控制字的前5位后,A/D转换器进入采样阶段.控制字节输入完毕后,等待BUSY为低电平后,在每个DCLK的下降沿,A/D转换的坐标值从高位到低位逐位从DOUT引脚向微处理器输出.这样为了获得一个坐标值,ADS7846与AT91SAM9261之间需要经过3个SPI时钟传送,即经过3×8=24个DCLK时钟周期[5].2.2 LCD显示控制器设计LCD显示控制器采用AT91SAM9261内部集成的LCD控制器作为LCD的控制单元.AT91SAM9261处理器内部集成的LCD控制器能支持单、双扫描模式的黑白或者彩色STN屏,也支持单扫描模式的TFT屏.LCD控制器支持4位单扫描和8位单或双扫描及16位双扫描STN屏,彩色STN显示时多达4096色,单色STN每像素为4位,彩色STN每像素为16位,TFT每像素为16和24位,分辨率支持达2048*2048的高分辨率.本文使用处理器来驱动640*480的TFT显示器.LCD控制器框图如图4所示,LCD控制器与外部以及ARM内核的连接图,通过以下的信号来控制显示,其中LCDVSYNC为LCD垂直同步,LCDHSYNC为LCD水平同步,LCDDOTCK为LCD点阵数据时钟,LCDDEN为LCD数据使能,LCDCC为LCD对比度控制,LCDD0-LCDD23为数据总线.且本文中的控制器为DMA控制器,可以不经处理器直接读取显示缓存中的数据,加速LCD的显示[6][7].2.3 TFT面板硬件接口设计触摸屏AA065VD01是一个6.5寸的LED背光源的工业级显示屏,分辨率为640*480,每个像素点由红绿蓝三基色组成,每种基色由6位的数据宽度,刷新频率60 Hz.采用DB9B-31-1V接插件,工作时序如图5所示.2.4 环境光监测电路设计为了更好的监测环境光线的强弱,系统选用TSL250RD专用芯片,TSL250RD是一款高速、低功耗、宽量程、光强传感器芯片.具有电路简单、测试敏感的特点,能根据光线的强度,输出相应的电压,只需要将电压测量出来就可以知道环境光的强度.即将测量的光强度电压值送到处理器,显示处理器根据电压值的大小调节触摸屏的显示亮度.3.1 程序流程图系统的架构如图6所示,软件系统可以看作有3层结构,最上层是用户的应用程序层,用户编写的程序就是显示在显示器上面的内容.应用程序通过调用Linux内核里面的fb_read(),fb_write()等函数来处理需要显示的内容,到最后将数据交给LCD控制器,最终在显示器上面显示相关的内容[8].3.2 部分程序触摸屏控制系统的软件采用Linux系统开发,在Linux里面是作为一个平台设备来管理,针对不同型号的显示屏,只需要在Linux下的\linux-2.6.23.1\arch\arm\mach-at91里面board-sam9261ek.c文件内配置和显示屏相关的参数即可,具体如下:/* LCD Controller */#if defined (CONFIG_FB_ATMEL) || defined (CONFIG_FB_ATMEL_MODULE) Static struck fb_videomode at91_tft_vga_modes[]={{.name = “TX09D50VM1CCA@60”,.refresh= 60,.xres = 640,.yres = 480,.picklock = 40000,.left_margin = 130,.right_margin = 170,.upper_margin = 17,.lower_margin = 9,.hsync_len = 20,.vsync_len = 17,.sync = 0,.vmode = FB_VMODE_NONINTERLACED,}, };本文研究了采用ARM9内核AT91SAM9261微处理器实现6.5寸TFT-LCD触摸屏控制系统的硬件方案、工作原理、软件设计及实现的过程,包括硬件电路的设计和软件设计.创新点在于提出基于ARM9微处理器的触摸屏系统,分析从底层硬件设计、设备驱动、显示系统的移植以及GUI应用,并构建一个完整的触摸屏系统.产品经过调试后能正常地显示,通过加载QT编写的应用程序可以正常的通过触摸屏来进行操作,达到了预期的设计要求,并可根据环境光线强度具有自动调节液晶屏显示亮度的功能.可以广泛的应用于工业控制、移动输入设备、智能家电等领域.【相关文献】[1] 吴青萍,沈凯.基于ARM处理器的TSC2046触摸屏控制器的应用[J].现代电子技术,2011,34(23):195-197.[2] 刘晓芳,刘建群,张海雄,等.基于ARM的LCD触摸屏系统设计[J].微计算机信息,2009,25(4-2):170-171.[3] 梁明亮,张惠敏,徐冰.基于ARM微处理器的液晶触摸屏的接口设计[J].计算机测量与控制,2011,19(3):691-693.[4] [5]李春萍,李颉思.嵌入式Linux中对触摸屏驱动的设计[J].计算机工程与设计,2007,28(6):1387-1389.[6] 陆林.基于ARM9的大型触摸屏控制器的研究与开发[D].江南大学硕士学位论文,2008:9-12.[7] 张未名,宗国仕.基ARM-Linux的触摸屏驱动及其应用研究[J].长春师范学院学报(自然科学版),2011,30(3):30-33.[8] 刘荣林,刘亚坤,武华,等.基于ARM嵌入式触摸屏的设计与研究[J].内蒙古大学学报(自然科学版),2009,40(6):708-711.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ARM7支持触摸屏和实时操作系统的开发与应用作者:时间:2010-09-25 来源:电子产品世界浏览评论推荐给好友我有问题个性化定制关键词:ARM 触摸屏μC/GUI分享到:开心网人人网新浪微博EEPW微博摘要:本文介绍了μC/OS-II嵌入式实时操作系统和μC/GUI在ARM7处理器上的移植方法,以及如何利用嵌入电子产品世界/article/112971.htm式操作系统进行应用程序的开发和管理各种任务。
重点讨论了μC/OS-II实时操作系统的移植方法和μC/GUI的移植技术,并提供了一种简单有效的去除触摸屏抖动的方法;最后通过应用实例对任务的划分和界面的操作进行了说明。
关键词:触摸屏;μC/GUI;μC/OS-II;ARM7概述随着信息电子产品世界/article/112971.htm技术的发展,支持图形界面的触摸操作和实时操作系统相结合的应用系统已经越来越广泛地应用到航空航天、军事、消费类电子、通讯设备等领域。
mC/OS-II操作系统是一种占先式、实时操作系统(RTOS),由于其内核可拆减、可剥离性,使得它在实时控制领域中有着广泛的应用。
它不仅减小了因为系统硬件设计缺陷带来的不可靠因素,而且增强了系统的控制实时性,从软件方面进一步增强了ARM控制系统的性能。
另外,新版本的mC/OS-II已经通过了FAA认证,很适合应用于对实时性要求很高的嵌入式工业控制领域,如目前应用较广泛的军用战斗机、攻击机和火控系统等。
支持图形界面操作(mC/GUI)是一种较为流行的人机交互系统,它能够提供了友好的人机交互平台,使得微处理器成为大多数人都能够使用和接受的工具。
与PC机不同,由于mC/OS-II基本为“黑盒”式操作系统,对人机界面的控制与开发需比较复杂的编程技术和时序控制技术。
ARM7嵌入式实时控制系统对mC/GUI的要求更高,包括轻型、占用资源少、高性能、高可靠性及可配置等。
因此,如何将ARM7、mC/GUI、mC/OS-II、触摸屏驱动和应用程序有机的结合起来,在ARM7上进行运行并完成用户想实现的任务,成为在嵌入式操作系统开发中的一项关键技术。
mC/OS-II嵌入式操作系统的移植mC/OS-II作为操作系统的内核,主要的任务就是完成多任务之间的调度和同步,协调各个硬件源不会冲突。
与其它嵌入式操作系统相比,它具有系统透明、可拆减、接口简单的特点。
下面就如何在S3C44B0进行操作系统移植和修改作简要的描述:(1)重新修改OS_CPU.H文件a)定义数据类型:mC/OS-Ⅱ不使用C语言中的short、int、long等与处理器类型有关的数据类型,而代之以移植性强的数据类型,这样既直观又便于移植;b)定义堆栈增长类型和ARM运行的模式:虽然ARM处理器对堆栈向上与向下的两种增长方式都予以支持,但由于编译器ADS仅支持堆栈从上往下,并且必须是满递减堆栈,所以在文件中用来定义堆栈增长方式的常量OS_STK_GROWTH 的值为1;c)需对外部函数声明:如在mC/OS-II.h头文件中,有些要移植的函数已经声明,包括:OSTaskStkInit()、OSIntCtxSw(void)、OSStartHighRdy(void) 。
(2)修改OS_CPU_C.C文件a)任务堆栈初始化函数OSTaskStkInit():在编写任务堆栈初始化函数OSTaskStkInit()之前,必须先根据处理器的结构和特点确定任务的堆栈结构;b)钩子函数:mC/OS-II为了用户在系统函数中书写自己的代码而预置了一些钩子函数(如OSTimeTickHook),这些函数在移植时可全为空函数,可根据用户的需要添加。
(3)重点编写OS_CPU_A.S文件a)开/关中断函数:在ARM7处理器核中可利用改变程序状态寄存器CPSR中的相应控制位实现;b)OSStartHighRdy(void):OSStart()函数调用OSStartHighRdy()来使就绪态任务中优先级最高的任务开始执行;c)OS_TASK_SW(void):μC/OS-II通过调用OSSched()函数来完成任务调度的,OSSched()先将最高优先级任务的地址装载到OSTCBHighRdy,再通过调用OS_TASK_SW()执行任务级的任务切换,OS_TASK_SW主要完成保护现场,完成用于的任务,恢复现场;d)OSIntCtxSw(void):OSIntExit()通过调用OSIntCtxSw(),在中断服务程序中执行任务切换功能。
e)时钟节拍函数:在本移植中,只使用了ARM的IRQ中断。
由于不同的ARM芯片的中断系统并不完全一样,因此不可能编写出对所有使用ARM核的处理器通用的中断及节拍移植代码,但是这是后续任务管理中重点需要操作系统进行处理的,OSTickISR的实现代码见程序清单。
程序清单OSTickISR()OSTickISRSTMFD SP!, {R0-R3,R12,LR}BL OSIntEnterBL user_function ;调用用户处理的中断处理程序BL OSIntExitLDMFD SP!,{R0-R3,R12,LR}S3C44B0触摸屏驱动程序编制本文采用固定参考电压模式,在驱动程序开发过程中,需要关注时钟端、输入端和输出端的时序特性。
首先检测PENIRQ是否为低电平,只有触摸屏有接触时此位才会为低电平。
利用软件模拟DIN、DOUT和DCLK上的三线串行传输时序,将读取的X或Y坐标数值的控制字串行送人ADS7843,然后再从对应的函数读出该坐标值,获取坐标值的源程序如下:int TOUCH_X_MeasureX(void){X=ReadTouchXY(CHX);return X;}int TOUCH_X_MeasureY(void){Y=ReadTouchXY(CHY);return Y;}1 2 3其中,ReadTouchXY()函数通过TOUCH_X_MeasureX(void)、TOUCH_X_MeasureY(void)读取对应坐标的X、Y轴的电压值,并送入主控程序进行坐标转化,得出当前触摸屏按压的位置。
int ReadTouchXY(unsigned charcommand){//根据command参数,进行X、Y向触摸点选择、去抖、位置的计算等电子产品世界/article/112971_2.htm return ack;//返回触摸屏对应位置值;}mC/GUI及与操作系统的接口mC/GUI是运行于操作系统之上的程序,它既需要与操作系统协调,又需要与各种输入/输出设备协调,即通过输入设备接收用户请求,通过输出设备发送微处理器的处理结果。
因此,mC/GUI的接口主电子产品世界/article/112971_2.htm要包括两个:与操作系统的接口和与输入/输出设备的接口,这也正是在移植mC/GUI的过程中所要解决的关键问题。
mC/GUI与mC/OS-II结合应用时通过上锁和解锁来解决资源互斥的问题,其过程是通过在关键区域入口设置GUI_X_Lock()以获得专一访问权,用完后在出口处设置GUI_X_Unlock()让出资源,达到多个GUI任务对同一数据在关键区域内访问的互斥。
在mC/GUI移植到mC/OS-II的过程中,需要利用操作系统的资源来实现GUI所需要的功能,即利用μC/OSII提供的时间管理、任务管理和资源共享机制来实现μC/GUI中相应的功能,具体要实现以下函数的重新定义:(1)时间函数GUI_X_Delay() //延迟指定的时间段后返回GUI_X_ExecIdle() //视窗管理器的非堵塞函数调用GUI_X_GetTime() //返回当前系统的时间,以毫秒为单位(2)内核接口函数GUI_X_InitOS() //初始化内核接口模块GUI_X_GetTaskID() //返回一个当前任务/线程唯一的32位标识符GUI_X_Lock() //给GUI上锁GUI_X_UnLock() //解锁GUIGUI_X_Log() //返回调试信息(3)LCD底层驱动程序要使mC/GUI能够在目标系统上运行,首先要对mC/GUI进行配置和修改,也就是移植。
移植工作主要是指对配置头文件中的宏定义根据具体情况进行修改,包括LCD宏和LCD控制器宏。
使用mC/GUI库函数时,必须在主函数前调用头文件“gui.h”,并根据需要做适当的修改。
值得注意的是,在此文件的预定义语句中,必须将GUI_SUPPORT_TOUCH设为1。
如果需要在屏幕上显示中文,除了添加中文字库到工程中外,还需要将GULDEFAULT_FONT 设为&GULFontHZ12,HZ12代表使用的中文字体。
如果需要在mC/GUI的控件中使用中文,也需要在控件的预定义语句中作相应的修改。
由于ARM7芯片S3C44B0X内部集成了LCD控制器,LCD底层驱动程序主要是设计与LCD屏相关的参数以及其特殊的控制寄存器,主要包括以下的参数和寄存器:#dene SCR_XSIZE (640)//LCD水平尺寸#dene SCR_YSIZE (240)//LCD垂直尺寸#dene LCD_XSIZE (640)//LCD水平分辨率#dene LCD_YSIZE (240)//LCD垂直分辨率#define ARRAY_SIZE_COLOR (SCR_XSIZE/1*SCR_YSIZE)//LCD水平与垂直比例#define HOZVAL_COLOR (LCD_XSIZE*3/8-1)//LCD水平字节尺寸#dene SCR_XSIZE (640)//LCD水平尺寸#dene SCR_XSIZE (640)//LCD水平尺寸寄存器的定义根据不同的微处理器和LCD颜色、尺寸等来定义,这里以S3C44B0X说明:rLCDCON1=(0)|(2<<5)|(MVAL_USED<<7)|(0x3<<8)|(0x3<<10)|(CLKVAL_COLOR<<12);rLCDCON2=(LINEVAL)|(HOZVAL_COLOR<<10)|(10<<21);rLCDSADDR1= (0x3<<27电子产品世界/article/112971_3.htm)|(((U32)frameBuffer>>22)<<21)|M5D((U32)fra meBu-er>>1);rLCDSADDR3= (LCD_XSIZE/2)|(((SCR_XSIZE-LCD_XSIZE)/2)<<9);嵌入式操作系统下应用程序的开发在嵌入式操作系统下开发基电子产品世界/article/112971_3.htm于ARM7的应用程序主要是进行任务的划分,根据每个任务的紧急程度建立不同优先级,下面就任务划分的原则和实例进行说明:任务划分原则将一个软件系统分解成并行任务时,主要考虑系统内功能的异步性。