风力机电动变桨伺服系统的控制
风力机组电动变桨系统
风力机组电动变桨系统摘要:目前,电动变桨系统已取代液压变浆系统并被大多数风力机组采用。
电动变桨系统作为风力机组功率控制和安全运行的重要执行结构,直接决定风力机组吸收的风能的大小,对于机组的安全稳定运行发挥着重要作用。
此处介绍了电动变桨系统的电气结构和运动控制技术要求,分析了系统中变桨控制器、备用电源、变桨电机和伺服驱动器4大部件的功能、特点及设计中需要注意的题。
详细介绍了备用电源不同储能元件的方案,不同种类变桨电机的特点及其适用场合,伺服驱动器的不同设计方案,并分别做了比较分析。
最后展望了电动变桨系统的发展方向。
关键词:风力机;电动变桨控制;变桨驱动器1 引言变桨机组已经取代定桨机组成为风力机组的主流。
变桨系统作为风力机组功率控制和安全运行的重要执行结构,在机组运行中发挥着重要作用。
正常情况下,变桨系统按照风力机组主控制器的指令驱动桨叶旋转到达指定的桨距角位置,使风力机组在各种工况下(启动、正常运转、停机)按最佳参数运行,实现并网过程的快速无冲击;在紧急故障时,调节桨距角使桨叶顺桨,进行气动刹车,保证风力机组安全。
风力机组的变桨系统分为液压变桨和电动变桨两大类,其中,液压变桨系统存在非线性、容易泄漏、卡涩等缺点,泄漏不仅容易造成机组运行故障,而且给日常维护带来了不便。
电动变桨系统采用电机配合减速器对桨叶进行单独控制,其结构紧凑、可靠,可独立变桨。
只要风机控制器给变桨控制器发出桨距角指令,变桨控制器就会按照--定控制策略控制3个伺服驱动器,驱动电机通过减速器带动桨叶旋转完成变桨。
3个桨叶中只要2个桨叶处于顺桨位置即可保证风力机组顺利停机,处于安全状态。
我国目前安装的风机主力机型容量在 1.5 - 3.6MW之间,且大多为电动变桨机组。
2 机组对变桨系统的要求变桨系统工作环境恶劣,长期承受振动、高低温的影响,维护困难,故要求其具有较高的可靠性。
在一定桨距角下,风力机组俘获的风能与风速的三次方成正比,特别是在高风速段的变化,引起风力机组俘获风能变化极大。
风力发电机变桨距控制技术研究

风力发电机变桨距控制技术研究随着全球对可再生能源的需求不断增加,风力发电作为一种清洁、可持续的能源形式,逐渐受到人们的关注。
而风力发电机的变桨距控制技术的研究与应用,对于提高风力发电机的效率和稳定性具有重要意义。
风力发电机的变桨距控制技术是指根据风力发电机所接收的风速信号,通过控制变桨距来调整叶片的角度,以实现最佳功率捕获。
变桨距控制技术可以根据实时风速变化,调整叶片的角度,使其在不同风速下都能运行在最佳工作状态,从而提高风力发电机的发电效率。
风力发电机的变桨距控制技术主要包括传感器、控制器和执行器三个部分。
传感器用于感知风速信号并将其转化为电信号,控制器通过对风速信号的处理和分析,得出最佳的变桨距控制策略,最后通过执行器来实现叶片角度的调整。
在风力发电机的变桨距控制技术研究中,需考虑以下几个方面。
首先,需选择合适的传感器来准确感知风速信号,以确保控制器的准确性。
其次,需要在控制器中设计合理的算法,以根据实时风速变化来调整叶片的角度。
同时,还需考虑到不同风速下的功率输出特性和风力发电机的安全性能,以确保变桨距控制技术的可靠性和稳定性。
此外,风力发电机的变桨距控制技术还面临一些挑战。
例如,风速信号的准确性和稳定性对于变桨距控制的精度和效果至关重要。
此外,变桨距控制技术的实施成本也是一个重要的考虑因素。
因此,研究人员需要不断改进传感器和控制器的技术,并降低成本,以实现风力发电机变桨距控制技术的普及和应用。
综上所述,风力发电机的变桨距控制技术是提高风力发电机效率和稳定性的重要手段。
通过合理选择传感器、设计优化的控制算法,并考虑到功率输出特性和安全性能,可以实现风力发电机在不同风速下的最佳工作状态。
未来,随着技术的进一步发展和成本的降低,风力发电机变桨距控制技术有望在风力发电行业中得到更广泛的应用。
风电变桨控制原理

风电变桨控制原理是指利用风能发电系统中的变桨机构来调整风机叶片的角度,以使风机在不同风速下保持最佳的转速和功率输出。
风电变桨控制原理主要包括以下几个方面:
1. 风速检测:通过安装在风机上的风速传感器或气象塔上的风速测量仪器,实时监测风速的变化。
2. 风速信号处理:将风速信号传输到控制系统中进行处理,以确定当前的风速状况。
3. 控制策略选择:根据风速信号和预设的控制策略,选择合适的变桨控制策略,以实现最佳的风机运行。
4. 变桨角度调整:根据控制策略,通过控制变桨机构,调整风机叶片的角度,以改变叶片的风阻特性和受力情况,从而使风机保持最佳的转速和功率输出。
5. 系统监测和保护:同时监测风机的运行状态和环境条件,如温度、湿度等,以及风机的故障和异常情况,及时采取相应的保护措施,确保风机的安全运行。
风电变桨控制原理的主要目标是通过调整风机叶片的角度,使风机在不同风速下保持最佳的转速和功率输出,从而提高风能发电系统的发电效率和可靠性。
试析风力发电机组电动变桨控制系统

试析风力发电机组电动变桨控制系统一、变桨系统控制原理本系统采用变速变桨距调节的控制方式,通过频率转换器耦合发电机与电网,允许通过控制发电机的反作用力矩来改变转速,在高风速时,转矩被保持在额定水平,变桨距控制用于调节转速及功率,二、控制器及仿真模型建立针对本系统,将模糊控制与PID控制算法相结合设计了一种通过模糊规则切换两种控制规律的无触点的切换方式,优化了控制器的设计,弥补了常规算法的不足,采用这种方法的Fuzzy-PID分段复合控制器和仿真模型三、风电机组控制系统概述随着风电机组单机容量的不断加大,塔架高度和叶轮直径也随之不断扩大,兆瓦级风力发电机组在额定风速的情况下,桨叶在旋转过程中其最高端和最低端垂直高度上的功率吸收相差20% 以上,这使得普通叶轮统一变桨距控制在大型机组上无任何优势可言。
变桨距控制系统作为兆瓦级风力发电机组控制系统的核心部分之一,对机组高效、稳定、安全的运行具有非常重要的作用。
而独立桨叶变距系统的每只桨叶都有一套独立的变距伺服驱动系统,采用独立桨叶变桨距控制方法可以减少传动系统的故障率,减轻输出力矩脉动,提高系统运行可靠性和稳定性,提高机组运行寿命。
同时独立桨叶变距控制不仅拥有普通叶轮整体变距控制的优点,还能很好地解决垂直高度上风速变化对风机的影响这一不利因素。
但是如果采用液压伺服驱动,其系统结构过于复杂,会给维护和修理造成一定难度。
因此,独立变桨距控制系统现在通常都采用电动机驱动方式。
本文在分析风电机组变桨距控制研究现状的基础上,提出优化的变桨距控制策略,利用Matlab/Simulink对其进行仿真,设计了基于模糊控制的变桨距控制器,使控制效果得到了提高。
下面的实例,是以典型的独立变桨控制系统来说明变桨控制系统的基本构成。
一般的独立电动变桨控制,主要是由3套独立的变桨装置组成,不但提高了风力机的输出功率,还可以允许3个桨叶独立变桨,即使在其中一个桨叶刹车制动失败时,其他2个桨叶也可以实现安全刹车的过程,提高了整个系统的安全性,能全面满足其刹车制动需要。
风力发电机组变桨系统设计与控制

风力发电机组变桨系统设计与控制近年来,随着全球能源危机的爆发以及对环境保护的重视,风力发电作为一种可再生的清洁能源正日益受到广泛关注。
风力发电机组的变桨系统是其中一个重要的组成部分,它通过调整桨叶的角度来控制风机的转速和输出功率,以实现最佳风能利用率。
本文将详细介绍风力发电机组变桨系统的设计原理和控制策略。
首先,风力发电机组的变桨系统设计需要考虑多个因素。
其中包括风速、风向、风场条件以及机组的工作状况等。
在设计变桨系统时,需要确定合适的桨叶数目、桨叶形状、桨叶材料以及桨叶安装方式等。
同时,还需要考虑叶片的结构强度以及在高风速情况下的耐用性。
这些设计要素将直接影响到风机的性能和寿命。
其次,风力发电机组的变桨系统需要采用合适的控制策略来实现最佳风能利用效率。
一般来说,风机的控制策略可以分为两种类型:定常控制和非定常控制。
定常控制是基于恒定的控制策略,根据风场条件和机组负荷,设定固定的桨叶角度来实现最佳功率输出。
非定常控制则是基于实时测量的风速和机组运行状态,动态调整桨叶角度来实现最佳风能利用效率。
根据不同的需求和场地条件,可以选择合适的控制策略。
在风力发电机组变桨系统的实际控制中,通常采用闭环控制的方式。
这意味着需要传感器来实时测量风速、机组运行状态以及环境参数,并将这些数据反馈给控制系统。
控制系统会根据这些反馈数据,不断调整桨叶角度,以实现最佳风能利用效率。
同时,还需要考虑到系统的安全性和鲁棒性,以应对突发情况和异常工况。
除了设计和控制策略,风力发电机组变桨系统还需要考虑到系统的维护和保养。
定期的维护和保养可以延长系统的寿命并提高系统的性能。
在维护和保养过程中,需要检查桨叶的磨损情况、润滑系统的工作状态以及传感器的准确性等。
同时,还需要定期进行系统的校准和参数调整,以保证系统的稳定性和准确性。
尽管风力发电机组变桨系统的设计和控制存在一定的挑战和难点,但通过合理的设计和有效的控制策略,可以实现风能资源的最佳利用。
兆瓦级风力发电电伺服独立变桨控制系统的设计
I e e e e t i t h Co r lS se sg fM W td W i d Tu b ne nd p nd ntEl c rc Pic nt o y tm De i n o Ra e n r i
YAN h o, NG h — i CAIXu Z u LI Z i n, b
d ie s s e a c r i g t h p e n o q e r q ie n s o h t r n a wh l ac lt d a d d — r y tm c o d n O t e s e d a d t r u e u r me t f t e mo o ,a d me n i c lu a e n e v e sg e . Th x e i n a r s l h w h tt es s e h sa h g e p n e s e d a d c n r l r cso in d ee p rme t l e u t s o t a h y t m a ih r s o s p e n o t o e i in,wh c s p ih f l e h e ur me t fc n r lo h i h s s e i W l s n u b n y t m 。a d a h a u l me tt e r q ie n s o o t o ft e p t y tm n M y c ca s wi d t r i e s s e n tt e s me t h y t m a i h r r l b l y a d s f t ,h v o d p o p c n h a u f p l a in i t es se h shg e ei it n aey me a i a e a g o r s e ta d t e v l e o p i t . a c o K ywod : n o e e ea in id p n e teeti pth c n r lpth c n r l y t m;t n b o rs p l e ls d p w rg n rt ; e e d n lcr i o to ; i o to se sa d y p we u p y o n c c c s
风力发电机变桨培训

动态工作
用一个风扇强制风冷
一个内置在定子绕组中的 Pt-100
变频器操作,增加 du/dt 值,增加铁心损耗,增加电 压峰值
单传动, 闭合环路
100 %,当制动器有飞轮 时,电机必须持续保持叶 片在工作位置
最大加速度125 1 rpm/s
扭矩限制 电缆长度 使用寿命
最大扭矩限制到65 Nm
3.3工作原理
变桨齿轮箱必须为小型并且具有高过载能力。齿 轮箱不能自锁定以便小齿轮驱动。为了调整变桨,叶 片可以旋转到参考位置,顺桨位置,在该位置叶片以 大约双倍的额定扭矩瞬间压下止挡。这在一天运行之 中可以发生多次。通过短时间使变频器和电机过载来 达到要求的扭矩。齿轮箱和电机是直联型。变桨电机 是含有位置反馈和电热调节器的伺服电动机。电动机 由变频器连接到直流母线供给电流。
3.4变桨驱动装置平面图
位置1:压板用螺纹孔,用于安装小齿轮压 板。
位置2:驱动器吊环,用于起吊安装变桨位置4:电机接线盒。
3.5变桨驱动装置的基本维护
1.检查变将驱动装置表面清洁度。 2.检查变将驱动装置表面防腐层。 3.检查变桨电机是否过热、有异常噪声等。 4.检查变桨齿轮箱润滑油。 5.检查变桨驱动装置螺栓紧固。
4.雷电保护装置
4.1安装位置
雷电保护装置在变桨装置中的具体位置见图1, 在大齿圈下方偏左一个螺栓孔的位置装第一个保 护爪,然后120等分安装另外两个雷电保护爪。
4.2组成部件
雷电保护爪主要由三部分组成,按照安装顺序 从上到下依次是垫片压板,炭纤维刷和集电爪。
4.3工作原理
雷电保护装置可以有效的将作用在轮毂和叶片 上的电流通过集电爪导到地面,避免雷击使风机线 路损坏。炭纤维刷是为了补偿静电的不平衡,雷击 通过风机的金属部分传导。在旋转和非旋转部分的 过渡处采用火花放电器。这个系统有额外的电刷来 保护轴承和提供静电平衡的方法。
风力发电机组变桨控制
2.风力发电机组控制原理—变桨距控制对象特点a)气动非线性变桨距控制实质是通过改变攻角来控制风力机的驱动转矩,风能利用系数曲线对桨距角和叶尖速比的变化规律具有很强的非线性。
b)工况频繁切换由于自然风速大小随机变化,各风速段机组控制目标不同,导致变速风力发电机组随风速在各个运行工况之间频繁切换。
c)多扰动因素影响风力发电机组性能变化的不确定干扰因素很多,风速的变化(尤其是阵风)对风力发电机组的功率影响最大。
d)变桨距执行系统的大惯性与非线性常用的液压执行机构和电机执行机构,驱动时呈现出非线性的性质。
随着风力机容量的不断增大,变桨距执行机构自身的原因引入的惯量也越来越大,使动态性能变差,表现出了大惯性对象的特点。
2.风力发电机组控制原理—变桨距控制系统目前并网型风力发电机组的变桨距控制系统根据机组并网前、后的工况主要包含两种工作方式:并网前转速控制和并网后功率控制。
变桨距风力发电机组变桨控制系统图2.2.3 风电场接入电网的有关规定内容1.技术要求规范性引用文件GB/T 12325-2008 电能质量供电电压偏差GB 12326-2008 电能质量电压波动和闪变GB/T 14549-1993 电能质量公用电网谐波GB/T 15945-2008 电能质量电力系统频率偏差GB/T 15543-2008 电能质量三相电压不平衡DL 755-2001 电力系统安全稳定导则SD 325-1989 电力系统电压和无功技术导则GB/T 20320-2006 风力发电机组电能质量测量和评估方法DL/T 1040-2007 电网运行准则3 风电场接入电网的有关规定内容2.部分与具体技术要求1)有功功率2)无功功率3)电压偏差与低电压穿越4)运行频率5)电压波动6)通信与信号12)无功功率风电场应具备协调控制机组和无功补偿装置的能力。
应保证无功功率有一定的调节容量,该容量为风电场额定运行时功率因数0.98(超前)~0.98(滞后)所确定的无功功率容量范围,并实现在其中的动态连续调节。
新能源技术-风电中的变桨控制的原理与要求

新能源技术-风电中的变桨控制的原理与要求风力发电机的所处环境,也在不断的扩展。
在陆上的风电场,国内最高的海拔到了4700米,而海上的风电场,国内最远的风电场,离岸的直线距离为48千米。
风机的功率和尺寸不断增大,应用场景不断扩展,对于风机在风速变化下的适应性,以及极端条件下风机的安全性,提出了更高的要求。
而这正是风机变桨控制的拿手好戏。
变桨控制,即采用机械液压或者电动伺服的方式,控制风机桨叶的旋转,来调节桨叶的节距角,改变气流对桨叶的攻角,进而控制风机桨叶捕获的气动转矩和气动功率。
1、变桨控制原理以叶片的旋转面为参考面,当叶片与该面的角度及桨距角为0时,叶片捕获的风能最大,此时的风力发电机发出的功率也最大,当叶片与该面的角度及桨距角为90时,叶片的阻力最大,使得风机停机,这在一些极端天气里,对整个风机的安全运行至关重要。
电动变桨因为运行维护方便,成本低,控制响应高,在风电中采用的越来越多。
电动变桨采用电动伺服控制器驱动变桨电机,变桨电机驱动小齿轮,小齿轮再驱动桨叶的变桨轴承,从而实现叶片的转动。
电动变桨示意图,来自众城卓越官网2、变桨控制的要求变桨驱动器是变桨系统最为核心的部件,其平台化的产品功能不但可以覆盖陆上和海上所有风机平台的需求,也可以帮助这些平台降低成本,以及进一步提高变桨系统的可靠性和整机控制需求的适应性。
变桨距控制系统与变速恒频技术相配合,最终提高了整个风力发电系统的发电效率和电能质量。
由于风电场一般建在自然环境恶劣的地区,变桨控制的驱动器可靠性,环境适应性的要求很高,因为一个变桨驱动器出现故障,轻则造成风机停机,重则危及整个塔筒的安全,即使最小的维修,其停机的发电损失,以及巨额的维修费用也会对风电场造成巨大的经济损失。
从下表可以看出变桨驱动器的极高的可靠性,环境适应性,安全性的要求。
例如,典型工业伺服驱动器的工作环境温度只到45°C,45°C以上需要降额,而变桨控制驱动器的工作温度最高可达70°C,另外对于振动要求,典型工业伺服驱动器的振动依据频率范围在0.5g到1g 之间,低频20HZ以下1g,20Hz~50Hz之间0.5g或者0.6g,而变桨控制驱动器可达2g,另外变桨控制驱动器会需要通过低电压穿越测试,高电压穿越测试,以及考虑设计/制造失效模式影响分析等等。
新能源风力发电机组的变桨控制策略
新能源风力发电机组的变桨控制策略在新能源领域,风力发电是一种重要而广泛应用的发电方式。
风力发电机组的变桨控制策略在提高发电效率和保证安全运行方面起着关键作用。
本文将探讨新能源风力发电机组的变桨控制策略,以及其对风力发电系统性能的影响。
一、简介新能源风力发电是通过利用风能转化为电能的一种方式。
在风能转换过程中,风力发电机组起到关键作用。
风力发电机组通常包括塔筒、机舱和叶轮等部件。
其中,叶轮是转动以产生机械能的关键部分。
变桨控制策略用于调整叶轮的角度,以适应不同风速的工作条件,从而提高风力发电机组的发电效率。
二、常见的变桨控制策略1. 定桨控制策略定桨控制策略是指将风力发电机组的叶轮固定在一个特定的角度,不随风速的变化而改变。
这种控制策略适用于风速较低且稳定的环境,可以提供稳定的发电功率。
然而,在风速较高或变化较大的情况下,定桨控制策略可能导致风力发电机组无法正常工作。
2. 变桨控制策略变桨控制策略是根据风速的变化调整叶轮的角度,以保证风力发电机组在不同风速下都能正常运行。
通常,变桨控制策略根据风速测量数据和机组状态进行实时调整,以提供最佳的发电效率和安全运行。
3. 智能控制策略智能控制策略是指基于人工智能技术,将风力发电机组的变桨控制与其他系统进行智能化的集成。
通过对大数据的分析和模型训练,智能控制策略可以适应各种复杂的工况,实现更高效、可靠的发电。
三、变桨控制策略对风力发电系统性能的影响1. 发电效率变桨控制策略可以根据风速变化调整叶轮的角度,从而在不同风速下提供最佳的叶轮转速。
这样可以最大程度地利用风能,提高发电效率。
2. 安全性风力发电机组在遇到极端天气条件或风速突变时,需要能够及时调整叶轮的角度以保证系统的安全运行。
变桨控制策略可以根据实时监测数据和预测模型进行快速响应,确保风力发电机组在各种工况下都能安全运行。
3. 维护成本风力发电机组的叶轮在长时间运行中可能会受到风力和其他外力的损耗。
海上风力发电的变桨系统振动特性分析与控制方法研究

海上风力发电的变桨系统振动特性分析与控制方法研究随着可再生能源的兴起,风力发电已成为一种广为采纳的清洁能源生成方式。
而海上风力发电作为其一种重要形式,由于海上环境的特殊性以及风力机组的庞大尺寸,其振动特性和安全性问题备受关注。
本文将对海上风力发电的变桨系统振动特性进行分析,并提出相应的控制方法以提高其稳定性和安全性。
首先,我们需要了解海上风力发电的变桨系统的构成和工作原理。
变桨系统通常包括旋转轴、液压缸、锁定装置、定位刀刃等组件。
其工作原理是通过液压驱动系统控制刀刃的角度,实现风力机组的定位和控制。
变桨系统振动特性的确切原因是风力的恶劣环境下,刀刃在运行中会受到风力的影响导致系统振动。
针对海上风力发电的变桨系统振动特性,我们需要进行振动分析。
首先,可以利用传感器系统对风力机组进行实时监测,获取其运行状态和振动数据。
通过收集大量的振动数据,结合数学统计和数据分析方法,可以建立起振动特性的数学模型。
这将有助于我们进一步了解系统中存在的振动源、振动频率和振动幅度等信息。
接下来,针对分析得到的振动特性,我们可以提出一些控制方法来改善系统的振动性能。
首先,可以采用减振器来降低系统的振动幅度。
减振器可以通过吸收、分散或抑制振动能量的方式,将振动能量转化为其他形式的能量来减小振动的影响。
常见的减振器包括液压缓冲器、弹簧减振器和阻尼器等。
此外,优化系统的结构设计也是降低振动的重要手段之一。
通过优化参数,如刀刃材料的选择、刀刃的长度和质量分布以及液压系统的设计等,可以使系统更加坚固、稳定和抗振能力更强。
同时,还可以考虑采用一些先进的材料和制造工艺来改进系统的振动特性。
最后,综合应用控制方法中所提到的减振器和结构优化设计,可以形成完善的控制策略来应对变桨系统的振动问题。
这些控制策略还可以与风力机组的其他控制系统相结合,实现整个系统的协调运行。
同时,通过对实际海上风力发电场的观测和实验验证,可以进一步优化和改进控制方法,为海上风力发电的可靠性和安全性提供更好的保障。
风力机电动变桨伺服系统的控制
风力机电动变桨伺服系统的控制
容旭巍;汪至中;荆龙
【期刊名称】《机械与电子》
【年(卷),期】2008(000)003
【摘要】分析了目前兆瓦级变桨风力发电机主流的电动变桨控制方式,并设计了一套以三相异步电动机为伺服电机的电动变桨距系统,使得在调试过程中变桨距机构工作正常、稳定,达到了预期设计的目标.
【总页数】3页(P29-31)
【作者】容旭巍;汪至中;荆龙
【作者单位】北京交通大学电气工程学院,北京,100044;北京交通大学电气工程学院,北京,100044;北京交通大学电气工程学院,北京,100044
【正文语种】中文
【中图分类】TM921.54
【相关文献】
1.电动变桨伺服系统的智能控制研究 [J], 郭华旺;王石贤
2.变速变桨风力机的自适应变桨及转矩控制 [J], 杜静;文薄程;谢双义;金鑫;倪小伟
3.电动变桨伺服系统的自抗扰控制研究 [J], 王石贤;芦子卿
4.风力机电动变桨伺服系统SNPID仿真研究 [J], 薛永平;郑恩让
5.电动变桨伺服系统位置前馈控制器的设计研究 [J], 孙传华;杨东涛
因版权原因,仅展示原文概要,查看原文内容请购买。
风力发电机变桨控制系统培训教材
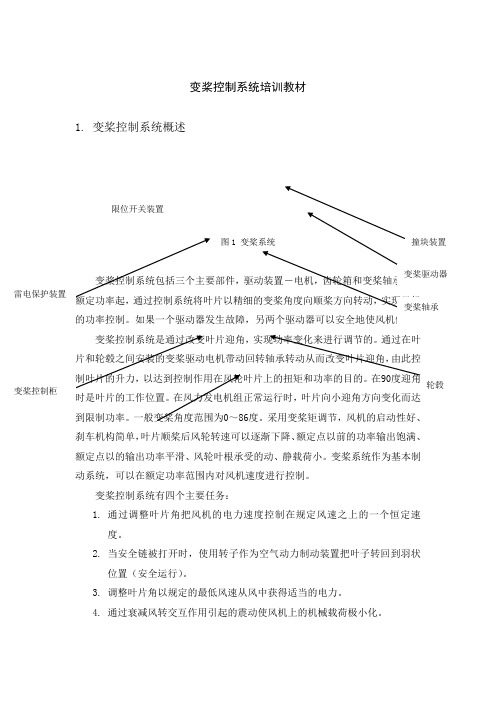
变桨控制系统培训教材1. 变桨控制系统概述图1 度。
采用变桨矩调节,风机的启动性好、刹车机构简单,叶片顺桨后风轮转速可以逐渐下降、额定点以前的功率输出饱满、额定点以的输出功率平滑、风轮叶根承受的动、静载荷小。
变桨系统作为基本制动系统,可以在额定功率范围内对风机速度进行控制。
变桨控制系统有四个主要任务:1. 通过调整叶片角把风机的电力速度控制在规定风速之上的一个恒定速度。
2. 当安全链被打开时,使用转子作为空气动力制动装置把叶子转回到羽状位置(安全运行)。
3. 调整叶片角以规定的最低风速从风中获得适当的电力。
4. 通过衰减风转交互作用引起的震动使风机上的机械载荷极小化。
2.变桨轴承图2 变桨轴承和驱动装置安装位置变桨轴承安装在轮毂上,通过外圈螺栓把紧。
运动,并与叶片联接。
工作原理当风向发生变化时,向地迎角,使叶片保持最佳的迎风状态,在叶片上的扭矩和功率的目的。
图从剖面图可以看出,变桨轴承采用深沟球轴承,深沟球轴承主要承受纯径向载荷,也可承受轴向载荷。
承受纯径向载荷时,接触角为零。
位置1位置2:变桨轴承内圈螺栓孔,与叶片联接。
位置3:S 标记,轴承淬硬轨迹的始末点,此区轴承承受力较弱,要避免进入位置4:位置工艺孔。
位置5:定位销孔,用来定位变桨轴承和轮毂。
位置6:进油孔,在此孔打入润滑油,起到润滑轴承作用。
位置7:最小滚动圆直径的标记(啮合圆)。
变桨轴承的基本维护1. 检查变桨轴承表面清洁度。
2. 检查变桨轴承表面防腐涂层。
3. 检查变桨轴承齿面情况。
4. 变桨轴承螺栓的紧固。
5. 变桨轴承润滑。
下表列举了变桨系统工作环境3.变桨驱动装置图4 变桨驱动装置变桨驱动装置通过螺柱与轮毂配合联接。
变桨齿轮箱前的小齿轮与变桨轴承内圈啮合,并要保证啮合间隙应在~之间,间隙由加工精度保证,无法调整。
组成部件变桨驱动装置由变桨电机和变桨齿轮箱两部分组成。
工作原理变桨齿轮箱必须为小型并且具有高过载能力。
齿轮箱不能自锁定以便小齿轮驱动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
风力机电动变桨伺服系统的控制容旭巍,汪至中,荆 龙(北京交通大学电气工程学院,北京100044)The Control of Pitch Servo Drive System in Wind TurbineR ONG X u 2w ei ,WANG Zhi 2zhong ,JINGLong(School of Electrical Engineering ,Beijing Jiaotong University ,Beijing 100044,China ) 摘要:分析了目前兆瓦级变桨风力发电机主流的电动变桨控制方式,并设计了一套以三相异步电动机为伺服电机的电动变桨距系统,使得在调试过程中变桨距机构工作正常、稳定,达到了预期设计的目标。
关键词:电动变桨距;伺服控制;三相异步电机中图分类号:TM921.54文献标识码:A文章编号:100122257(2008)0320029203收稿日期:2007211228Abstract :The paper analysis t he mainst ream way of pitch 2cont rolled system in t he MW wind t urbine group ,which is pitch servo drive cont rol system.Then design a combination of pitch 2con 2t rolledsystem ,whichuset hree 2p haseasyn 2chronous motor as t he servo motor.Thus make t he cont rol system steady ,t hen reach to t he require 2ment of system design.K ey w ords :elect ric pitch ;servo cont rol ;t hree 2p hase asynchrono us motor0 引言大型的兆瓦级风力发电机组按桨叶调节方式分类,分为定桨距失速型风力发电机和变桨距变速恒频的风力发电机。
相对于定桨距的失速型风机,变桨距风机具有在额定功率点以上输出功率平稳恒定的优点[1]。
这样可以有效地减少风力对风力机的冲击,并相当于延伸了最大风能的利用率。
在并网发电过程中,变桨距控制可实现快速无冲击并网。
风机的变桨距控制系统采用变速恒频技术,可提高整个风力发电系统的发电效率和电能质量。
1 变桨距风力机空气学原理首先需要了解变桨风力机所涉及的基本空气动力学的知识,从而理解变桨风力的工作原理和系统控制的对象[2]。
1.1 风力机的叶尖速比和攻角的概念为了表示风轮在不同风速中的状态,用叶片的叶尖圆周速度与风速之比,表示叶尖速比λ,即λ=2πR n v=ωRv(1)按照同步变桨式风力机的经典叶素理论,分析风力机叶片在工作时的状态如图1所示。
图1 叶片工作状态图中β为安装角或节距角,是半径r 处回转平面与桨叶截面翼弦的夹角;I 为倾角,是长度为d r 的叶素所受气流方向与回转平面的夹角;对于每个r 值的风力机叶片的倾角可以由下式计算:cot I =32λ=32λ0r R(2)1.2 变桨距风力机运行中叶片的受力分析对于长度为d r 的叶素进行分析如下:F =12ρC V S V 2(3)F 由平行于空气速度的阻力F d 和垂直于空气速度的升力F l 合成,如图2所示。
它们只与叶片的攻角有关,属于叶片翼型的物理特性,随着攻角的变化而变化。
对于已经安装好的风力机,按给定尖速比以及叶片翼型的最佳升阻比的攻角计算出叶片的安装角,即变桨时各叶片同步速变化。
・92・《机械与电子》2008(3)图2 旋转的桨叶在风中的受力2 风力发电机电动变桨控制系统结构兆瓦级风力发电机组都为高速的风力发电机,所以大多采用3个桨叶来捕捉风能。
兆瓦级风力机的桨叶都为二三十米,风速存在高度上的切变,整个风轮扫掠面积上的风速不平均,特别是叶片处在最顶端和最底端风速是不同的,风力机各风轮叶片在实际运行中的上、下位置时所得到的升力是不同的,即叶轮运行中存在额外阻力,影响风力机的输出功率和减少风力机的使用寿命。
要解决这个问题需要改变风力机变桨距控制系统对叶片的同步控制现状,实现风力机对叶片的异步控制[3]。
因此需要3套单桨叶的控制系统,以尽可能地捕捉到最大的风能,同时减缓了风对机舱上设备的振动,并采用了3套独立的变桨控制系统,如图3所示。
图3 电动变桨距系统的构成当风速超过额定的最大风速时,风速仪将信号传送到机舱内部的状态采集PL C 系统,通过Profi 2bus 2DP 总线传给主控机。
当主控制机确保风速信号确实超过额定风速后且满足风力机运行的条件时,由主控制机发出调桨叶的命令,主控机计算每个三相伺服交流电动机需要调节的节距角,转换到该桨叶的位置驱动伺服电机运行,伺服交流电动机连接减速机,通过主动齿轮与风机轮毂上的皮带齿轮相啮合,直接对该桨叶的节距角进行控制。
同时安装了一个非接触位移传感器,检测桨叶节距角的变化。
变桨距控制的供电电源是由塔下的主控制室向上提供三相的供电电源,机舱内部将交流电整流成60V 的直流电源向蓄电池充放电管理模块供电。
管理模块来监控蓄电池的电量是否满充,此部分是变桨系统稳定运行的关键。
采用超级电容器和蓄电池作为U PS 备用电源是最佳的设计方案,能够确保当风力机突然出现故障的时候,60s 内靠风速和电磁阀的配合,桨叶的节距角逐渐增大到最大,调节到顺桨位置,实现风力机的故障状态下的停车。
3 电动变桨系统运行过程分析3.1 启动过程变桨距的风力发电机在无风停车的情况下,桨叶的节距角约为90°,此时低风速空气气流对风机的桨叶不产生力矩,整个桨叶实际是一块阻尼板。
当机舱上的风速传感器检测到10分钟内的平均风速达到切入风速并且满足并网发电的要求时,控制桨叶向0°方向转动,直到气流对桨叶产生一定的攻角,叶轮开始起动。
直到风速达到切入风速后,开始并网发电。
3.2 欠功率状态风速低于额定风速工况,风力机在额定功率以下的低功率状态运行,即欠功率状态。
变桨距技术的初期对欠功率状态不加控制,即相当于定桨风力发电机组。
采用Optitip 技术的变桨距风机改善低风速时桨叶的气动性能。
本设计为了集中研究变桨控制问题,暂时简化了本部分的设计。
风力机运行在最大风能利用系数C p max 处,风机的转速控制在λopt =ωR/V 所确定的最佳转速点处。
3.3 恒功率状态当风速达到额定风速工况的条件,风力发电机组进入额定功率状态。
在风速达到切出风速之前,通过改变节距角,降低风能利用率,保证机组输出的转速不变,输出功率恒定。
变桨距风力机采用功率调节的模式,将功率反馈信号与给定值进行比较,按照风力机翼型的特性来设计,通过查表方式确定要调节的节距角,来保持恒功率区的功率恒定。
4 电动变桨距伺服系统变桨距控制系统是一个典型的随动控制系统,滞后于平均风速和风力发电机输出功率的变化。
由于桨叶的质量比较重,电机为低压大转矩异步电动机。
设计采用转差频率矢量控制技术解决了交流电・03・《机械与电子》2008(3)机在伺服驱动中的动态控制问题。
转差矢量控制双闭环控制系统,外环为转子的转速环,内环是定子电流环。
转差频率矢量控制通过检测定子电流和转子角速度,经过数学模型的运算就可以实现磁场定向控制[4]。
变桨距伺服控制中,节距给定值由风力发电机的输出功率和叶尖速比的曲线来确定,通过计算得到待调节的位置。
整个调速系统通过霍尔电流传感器获得电机定子三相电流i a ,i b ,i c ,经过信号调制,进行3s/2r 矢量变换,得到定子电流转矩分量和励磁分量作为定子电流的反馈量。
反馈量经过2个PI 电流调节器,电流指令矢量控制在与磁极所产生的磁通相正交的空间位置上,从而达到对转矩的控制,经过矢量旋转反变换器和2r/3s 反变换形成三相PWM 控制算法,来控制PWM 逆变器[1]。
DSP 的Q EP 单元读取增量型光电编码器单元,通过计算得到转子的转速反馈量。
非接触磁电式传感器作为桨叶节距角的精确测量设备和冗余保护单元。
测量齿轮安装在被测旋转体上,每转动1个齿,传感器的磁阻变化1次,线圈产生脉冲信号。
单位时间的齿轮转动的角度和齿轮齿数成反比。
由于变桨距速度都比较慢,需要减速机构。
行星减速箱为三级传动,减速比可以跟生产厂家定制。
在此,电机额定转速设定为3000r/min ,减速比为1800。
非接触位置传感器采集桨叶的节距角变化,与电机形成闭环PID 负反馈控制系统。
另外在桨叶的轮毂上加以行程开关以保证调桨系统的可靠性。
变桨距伺服系统的控制流程如图4所示。
图4 变桨控制系统的程序流程5 系统仿真结果系统的模型是基于S70型变桨距风机的运行特点来仿真,额定风速为15m/s ,额定功率为1500kW 。
伺服电机为低压大转矩三相交流异步电机,额定转速在3000r/min 。
仿真结果如图5所示。
在额定的风速以下,节距角约为3°,伺服电机保持停止的状态,输出功率和定桨风力机的输出特性一样,随着平均风速的变化而变化。
在额定风速以上的时候,节距角按照风力机的输出功率来进行调节,按照设计控制表根据高风速的功率曲线来确定角度。
图5 变桨控制系统的仿真6 结束语异步伺服电机的启动和制动性能相对于永磁同步电机要差一些,控制的精度不太精准,所以采用模糊控制和自适应等理论,成为下一步要改进的工作。
异步变桨距由于要考虑桨叶风速的不同,设计结构复杂,需要对各桨叶的攻角计算控制算法继续研究。
在恒功率区运行时,由于瞬时风速的影响,采用功率控制不能保持设计的精准,应采用低频风速分量和转子转速控制,来使功率曲线到达理想状态。
参考文献:[1] Bose B K.现代电力电子学与交流传动[M ].王 聪,等译.北京:机械工业出版社,2005.[2] 叶杭冶.风力发电机组的控制技术[M ].北京:机械工业出版社,2002.[3] 吴永忠,苏志勇,张丽娜.风力机异步变桨的初步研究[J ].节能,2007,(5):23-25.[4] 刘光德,等.风力发电机组电动变桨距系统的研究[J ].电机与控制应用,2006,33(10):31-34.作者简介:容旭巍 (1982-),男,河北石家庄人,硕士研究生,研究方向为风力发电机组的电气控制;汪至中 (1942-),男,上海人,教授,研究方向为电力电子传动、风力发电机组的电磁兼容。
・13・《机械与电子》2008(3)。