RoutineOptimization
组合优化

0 0 3 4 4 7
0 0 3 4 5 7
0 0 3 4 5 7
启发式算法
• 在实际应用中,可以通过数值模拟的方法 来衡量算法的性能,从而免去了理论证明 的困难和局限,使我们可以充分地利用经 验和技巧,自由地调整算法的步骤和参 数,设计出性能尽可能好的算法。这样的 算法称为启发式算法(heuristic)
k 0 w • 实例 0 0 C 5, n 4 p1 3, p2 4, p3 5, p4 6 1 0 w1 2, w2 3, w3 4, w4 5 2 0 • 最优值为 7,最优 3 0 解为物品1,2 放入 4 0 背包 5 0
1 2 3 4
0 0 3 3 3 3
• 由初始条件和递推关系可逐步求得 I (n, C), 外层循环为 k 0,, n ,内层循环为 w 0,, C • 该动态规划时间复杂性为 Ο(nC) ,背包问题 的实例规模为 Ο(n log2 B), B max{ p j , wj , C} , 因此它是一个伪多项式算法
背包问题的动态规划
中国邮递员问题
• 一位邮递员从邮局选好邮件去投 递,然后返回邮局。他必须经过 由他负责投递的每条街道至少一 次。如何为这位邮递员设计一条 投递线路,使其耗时最少。
中国邮递员问题
• Euler环游(一笔画)
• 经过图中所有边恰好一 次的回路称为Euler 回路 ,含有Euler回路的图称 为Euler 图 • 图是Euler 图的充要条件 是图中没有奇度顶点
P NP 假设下
• NP 类中的问题既不是没有多项式时间算法的问题 ,也不是最难的问题。
P NP 假设下
P 与NP-hard
• P问题
• 图的最短路 • 图的最大流、最小割 • 背包问题 • 划分问题 • 图的独立集、团、顶 点覆盖 P 问题 线性规划 (二维)匹配 指派 Euler圈 中国邮递员 最小生成树 NP-hard问题 整数规划 三维匹配 二次指派 Hamiltion圈 TSP 最小Steiner树
数学专业词汇及翻译

数学专业词汇及翻译一、字母顺序表 (1)二、常用的数学英语表述 (7)三、代数英语(高端) (13)一、字母顺序表1、数学专业词汇Aabsolute value 绝对值 accept 接受 acceptable region 接受域additivity 可加性 adjusted 调整的 alternative hypothesis 对立假设analysis 分析analysis of covariance 协方差分析analysis of variance 方差分析 arithmetic mean 算术平均值 association 相关性assumption 假设 assumption checking 假设检验availability 有效度average 均值Bbalanced 平衡的 band 带宽 bar chart 条形图beta-distribution 贝塔分布 between groups 组间的 bias 偏倚 binomial distribution 二项分布 binomial test 二项检验Ccalculate 计算 case 个案 category 类别 center of gravity 重心central tendency 中心趋势chi-square distribution 卡方分布chi-square test 卡方检验classify 分类cluster analysis 聚类分析coefficient 系数 coefficient of correlation 相关系数collinearity 共线性 column 列 compare 比较 comparison 对照 components 构成,分量compound 复合的 confidence interval 置信区间 consistency 一致性 constant 常数continuous variable 连续变量 control charts 控制图 correlation 相关 covariance 协方差 covariance matrix 协方差矩阵critical point 临界点critical value 临界值crosstab 列联表cubic 三次的,立方的cubic term 三次项cumulative distribution function 累加分布函数 curve estimation 曲线估计Ddata 数据default 默认的definition 定义deleted residual 剔除残差density function 密度函数dependent variable 因变量description 描述design of experiment 试验设计deviations 差异df.(degree of freedom) 自由度diagnostic 诊断dimension 维discrete variable 离散变量discriminant function 判别函数discriminatory analysis 判别分析distance 距离distribution 分布D-optimal design D-优化设计Eeaqual 相等 effects of interaction 交互效应 efficiency 有效性eigenvalue 特征值equal size 等含量equation 方程error 误差estimate 估计estimation of parameters 参数估计estimations 估计量evaluate 衡量exact value 精确值expectation 期望expected value 期望值exponential 指数的exponential distributon 指数分布extreme value 极值F factor 因素,因子 factor analysis 因子分析 factor score 因子得分 factorial designs 析因设计factorial experiment 析因试验fit 拟合fitted line 拟合线fitted value 拟合值 fixed model 固定模型 fixed variable 固定变量fractional factorial design 部分析因设计frequency 频数F-test F检验full factorial design 完全析因设计function 函数Ggamma distribution 伽玛分布geometric mean 几何均值group 组Hharmomic mean 调和均值 heterogeneity 不齐性histogram 直方图homogeneity 齐性homogeneity of variance 方差齐性hypothesis 假设 hypothesis test 假设检验Iindependence 独立independent variable 自变量independent-samples 独立样本 index 指数 index of correlation 相关指数 interaction 交互作用 interclass correlation 组内相关 interval estimate 区间估计intraclass correlation 组间相关inverse 倒数的iterate 迭代Kkernal 核 Kolmogorov-Smirnov test柯尔莫哥洛夫-斯米诺夫检验 kurtosis 峰度Llarge sample problem 大样本问题layer 层least-significant difference 最小显著差数least-square estimation 最小二乘估计least-square method 最小二乘法 level 水平 level of significance 显著性水平leverage value 中心化杠杆值life 寿命life test 寿命试验likelihood function 似然函数 likelihood ratio test 似然比检验linear 线性的linear estimator 线性估计linear model 线性模型linear regression 线性回归linear relation 线性关系linear term 线性项logarithmic 对数的logarithms 对数 logistic 逻辑的 lost function 损失函数Mmain effect 主效应matrix 矩阵maximum 最大值maximum likelihood estimation 极大似然估计 mean squared deviation(MSD) 均方差 mean sum of square 均方和 measure 衡量 media 中位数 M-estimator M估计minimum 最小值missing values 缺失值mixed model 混合模型 mode 众数model 模型Monte Carle method 蒙特卡罗法moving average 移动平均值multicollinearity 多元共线性multiple comparison 多重比较multiple correlation 多重相关multiple correlation coefficient 复相关系数multiple correlation coefficient 多元相关系数multiple regression analysis 多元回归分析multiple regression equation 多元回归方程 multiple response 多响应 multivariate analysis 多元分析Nnegative relationship 负相关nonadditively 不可加性nonlinear 非线性nonlinear regression 非线性回归noparametric tests 非参数检验 normal distribution 正态分布null hypothesis 零假设 number of cases 个案数Oone-sample 单样本 one-tailed test 单侧检验 one-way ANOVA 单向方差分析one-way classification 单向分类optimal 优化的optimum allocation 最优配制 order 排序order statistics 次序统计量 origin 原点orthogonal 正交的 outliers 异常值Ppaired observations 成对观测数据paired-sample 成对样本parameter 参数parameter estimation 参数估计 partial correlation 偏相关partial correlation coefficient 偏相关系数 partial regression coefficient 偏回归系数percent 百分数percentiles 百分位数pie chart 饼图point estimate 点估计poisson distribution 泊松分布polynomial curve 多项式曲线polynomial regression 多项式回归polynomials 多项式positive relationship 正相关 power 幂P-P plot P-P概率图predict 预测predicted value 预测值prediction intervals 预测区间principal component analysis 主成分分析 proability 概率probability density function 概率密度函数 probit analysis 概率分析proportion 比例Qqadratic 二次的 Q-Q plot Q-Q概率图 quadratic term 二次项quality control 质量控制 quantitative 数量的,度量的 quartiles 四分位数Rrandom 随机的 random number 随机数 random number 随机数random sampling 随机取样random seed 随机数种子random variable 随机变量 randomization 随机化 range 极差rank 秩 rank correlation 秩相关 rank statistic 秩统计量 regression analysis 回归分析regression coefficient 回归系数regression line 回归线reject 拒绝rejection region 拒绝域relationship 关系reliability 可*性repeated 重复的report 报告,报表 residual 残差 residual sum of squares 剩余平方和response 响应risk function 风险函数robustness 稳健性 root mean square 标准差 row 行 run 游程run test 游程检验Sample 样本sample size 样本容量sample space 样本空间sampling 取样 sampling inspection 抽样检验 scatter chart 散点图S-curve S形曲线separately 单独地sets 集合sign test 符号检验significance 显著性significance level 显著性水平significance testing 显著性检验 significant 显著的,有效的 significant digits 有效数字 skewed distribution 偏态分布 skewness 偏度 small sample problem 小样本问题 smooth 平滑 sort 排序 soruces of variation 方差来源 space 空间 spread 扩展square 平方 standard deviation 标准离差 standard error of mean 均值的标准误差standardization 标准化 standardize 标准化 statistic 统计量 statistical quality control 统计质量控制 std. residual 标准残差 stepwise regression analysis 逐步回归stimulus 刺激strong assumption 强假设stud. deleted residual 学生化剔除残差stud. residual 学生化残差 subsamples 次级样本 sufficient statistic 充分统计量sum 和 sum of squares 平方和 summary 概括,综述Ttable 表t-distribution t分布test 检验test criterion 检验判据test for linearity 线性检验 test of goodness of fit 拟合优度检验 test of homogeneity 齐性检验test of independence 独立性检验test rules 检验法则 test statistics 检验统计量 testing function 检验函数time series 时间序列tolerance limits 容许限total 总共,和transformation 转换 treatment 处理 trimmed mean 截尾均值 true value 真值 t-test t检验 two-tailed test 双侧检验unbalanced 不平衡的unbiased estimation 无偏估计unbiasedness 无偏性 uniform distribution 均匀分布Vvalue of estimator 估计值 variable 变量 variance 方差 variance components 方差分量 variance ratio 方差比 various 不同的 vector 向量Wweight 加权,权重weighted average 加权平均值within groups 组内的ZZ score Z分数2. 最优化方法词汇英汉对照表Aactive constraint 活动约束 active set method 活动集法 analytic gradient 解析梯度approximate 近似 arbitrary 强制性的 argument 变量 attainment factor 达到因子Bbandwidth 带宽be equivalent to 等价于best-fit 最佳拟合bound 边界Ccoefficient 系数complex-value 复数值component 分量constant 常数constrained 有约束的constraint 约束constraint function 约束函数continuous 连续的converge 收敛cubic polynomial interpolation method三次多项式插值法 curve-fitting 曲线拟合Ddata-fitting 数据拟合default 默认的,默认的define 定义diagonal 对角的direct search method 直接搜索法direction of search 搜索方向 discontinuous 不连续eigenvalue 特征值empty matrix 空矩阵equality 等式exceeded 溢出的Ffeasible 可行的 feasible solution 可行解 finite-difference 有限差分 first-order 一阶GGauss-Newton method 高斯-牛顿法 goal attainment problem 目标达到问题 gradient 梯度 gradient method 梯度法Hhandle 句柄 Hessian matrix 海色矩阵Independent variables 独立变量inequality 不等式infeasibility 不可行性infeasible 不可行的initial feasible solution 初始可行解initialize 初始化inverse 逆 invoke 激活 iteration 迭代 iteration 迭代JJacobian 雅可比矩阵LLagrange multiplier 拉格朗日乘子large-scale 大型的least square 最小二乘 least squares sense 最小二乘意义上的 Levenberg-Marquardt method 列文伯格-马夸尔特法line search 一维搜索linear 线性的linear equality constraints 线性等式约束linear programming problem 线性规划问题 local solution 局部解M medium-scale 中型的minimize 最小化mixed quadratic and cubic polynomialinterpolation and extrapolation method 混合二次、三次多项式内插、外插法multiobjective 多目标的Nnonlinear 非线性的 norm 范数Oobjective function 目标函数observed data 测量数据optimization routine 优化过程optimize 优化optimizer 求解器over-determined system 超定系统Pparameter 参数partial derivatives 偏导数polynomial interpolation method 多项式插值法Qquadratic 二次的 quadratic interpolation method 二次内插法quadratic programming 二次规划Rreal-value 实数值 residuals 残差 robust 稳健的 robustness 稳健性,鲁棒性S scalar 标量semi-infinitely problem 半无限问题Sequential Quadratic Programming method 序列二次规划法 simplex search method 单纯形法solution 解sparse matrix 稀疏矩阵sparsity pattern 稀疏模式 sparsity structure 稀疏结构 starting point 初始点step length 步长subspace trust region method 子空间置信域法sum-of-squares 平方和 symmetric matrix 对称矩阵Ttermination message 终止信息 termination tolerance 终止容限 the exit condition 退出条件 the method of steepest descent 最速下降法 transpose 转置Uunconstrained 无约束的 under-determined system 负定系统Vvariable 变量 vector 矢量Wweighting matrix 加权矩阵3 样条词汇英汉对照表Aapproximation 逼近 array 数组 a spline in b-form/b-spline b 样条 a spline of polynomial piece /ppform spline 分段多项式样条Bbivariate spline function 二元样条函数 break/breaks 断点Ccoefficient/coefficients 系数cubic interpolation 三次插值/三次内插cubic polynomial 三次多项式 cubic smoothing spline 三次平滑样条 cubic spline 三次样条cubic spline interpolation 三次样条插值/三次样条内插 curve 曲线Ddegree of freedom 自由度 dimension 维数Eend conditions 约束条件input argument 输入参数interpolation 插值/内插 interval取值区间Kknot/knots 节点Lleast-squares approximation 最小二乘拟合Mmultiplicity 重次 multivariate function 多元函数Ooptional argument 可选参数 order 阶次 output argument 输出参数P point/points 数据点Rrational spline 有理样条 rounding error 舍入误差(相对误差)Sscalar 标量sequence 数列(数组)spline 样条spline approximation 样条逼近/样条拟合spline function 样条函数 spline curve 样条曲线spline interpolation 样条插值/样条内插spline surface 样条曲面 smoothing spline 平滑样条Ttolerance 允许精度Uunivariate function 一元函数Vvector 向量Wweight/weights 权重4 偏微分方程数值解词汇英汉对照表Aabsolute error 绝对误差 absolute tolerance 绝对容限 adaptive mesh 适应性网格Bboundary condition 边界条件Ccontour plot 等值线图 converge 收敛 coordinate 坐标系Ddecomposed 分解的 decomposed geometry matrix 分解几何矩阵diagonal matrix 对角矩阵Dirichlet boundary conditions Dirichlet边界条件Eeigenvalue 特征值elliptic 椭圆形的error estimate 误差估计exact solution 精确解Ggeneralized Neumann boundary condition 推广的Neumann 边界条件 geometry 几何形状geometry description matrix 几何描述矩阵 geometry matrix 几何矩阵 graphical user interface(GUI)图形用户界面Hhyperbolic 双曲线的Iinitial mesh 初始网格Jjiggle 微调LLagrange multipliers 拉格朗日乘子Laplace equation 拉普拉斯方程linear interpolation 线性插值 loop 循环Mmachine precision 机器精度 mixed boundary condition 混合边界条件NNeuman boundary condition Neuman边界条件 node point 节点 nonlinear solver 非线性求解器 normal vector 法向量PParabolic 抛物线型的 partial differential equation 偏微分方程plane strain 平面应变 plane stress 平面应力 Poisson's equation 泊松方程 polygon 多边形 positive definite 正定Qquality 质量Rrefined triangular mesh 加密的三角形网格relative tolerance 相对容限 relative tolerance 相对容限 residual 残差 residual norm 残差范数Ssingular 奇异的二、常用的数学英语表述1.Logicthere existfor allp?q p implies q / if p, then qp?q p if and only if q /p is equivalent to q / p and q are equivalent2.Setsx∈A x belongs to A / x is an element (or a member) of Ax?A x does not belong to A / x is not an element (or a member) of AA?B A is contained in B / A is a subset of BA?B A contains B / B is a subset of AA∩B A cap B / A meet B / A intersection BA∪B A cup B / A join B / A union BA\B A minus B / the diference between A and BA×B A cross B / the cartesian product of A and B3. Real numbersx+1 x plus onex-1 x minus onex±1 x plus or minus onexy xy / x multiplied by y(x - y)(x + y) x minus y, x plus yx y x over y= the equals signx = 5 x equals 5 / x is equal to 5x≠5x (is) not equal to 5x≡y x is equivalent to (or identical with) yx ≡ y x is not equivalent to (or identical wit h) yx > y x is greater than yx≥y x is greater than or equal to yx < y x is less than yx≤y x is less than or equal to y0 < x < 1 zero is less than x is less than 10≤x≤1zero is less than or equal to x is less than or equal to 1 | x | mod x / modulus xx 2 x squared / x (raised) to the power 2x 3 x cubedx 4 x to the fourth / x to the power fourx n x to the nth / x to the power nx ?n x to the (power) minus nx (square) root x / the square root of xx 3 cube root (of) xx 4 fourth root (of) xx n nth root (of) x( x+y ) 2 x plus y all squared( x y ) 2 x over y all squaredn! n factorialx ^ x hatx ˉ x barx ?x tildex i xi / x subscript i / x suffix i / x sub i∑ i=1 n a i the sum from i equals one to n a i / the sum as i runs from 1 to n of the a i4. Linear algebra‖ x ‖the norm (or modulus) of xOA →OA / vector OAOA ˉ OA / the length of the segment OAA T A transpose / the transpose of AA ?1 A inverse / the inverse of A5. Functionsf( x ) fx / f of x / the function f of xf:S→T a function f from S to Tx→y x maps to y / x is sent (or mapped) to yf'( x ) f prime x / f dash x / the (first) derivative of f with respect to xf''( x ) f double-prime x / f double-dash x / the second derivative of f with r espect to xf'''( x ) triple-prime x / f triple-dash x / the third derivative of f with respect to xf (4) ( x ) f four x / the fourth derivative of f with respect to xf ? x 1the partial (derivative) of f with respect to x12 f ? x 1 2the second partial (derivative) of f with respect to x1∫ 0 ∞the i ntegral from zero to infinitylim?x→0 the limit as x approaches zerolim?x→0 + the limit as x approaches zero from abovelim?x→0 ?the limit as x approaches zero from belowlog e y log y to the base e / log to the base e of y / natural log (of) yln?y log y to the base e / log to the base e of y / natural log (of) y一般词汇数学mathematics, maths(BrE), math(AmE)公理axiom定理theorem计算calculation运算operation证明prove假设hypothesis, hypotheses(pl.)命题proposition算术arithmetic加plus(prep.), add(v.), addition(n.)被加数augend, summand加数addend和sum减minus(prep.), subtract(v.), subtraction(n.)被减数minuend减数subtrahend差remainder乘times(prep.), multiply(v.), multiplication(n.)被乘数multiplicand, faciend乘数multiplicator积product除divided by(prep.), divide(v.), division(n.)被除数dividend除数divisor商quotient等于equals, is equal to, is equivalent to 大于is greater than 小于is lesser than大于等于is equal or greater than小于等于is equal or lesser than运算符operator数字digit数number自然数natural number整数integer小数decimal小数点decimal point分数fraction分子numerator分母denominator比ratio正positive负negative零null, zero, nought, nil十进制decimal system二进制binary system十六进制hexadecimal system权weight, significance进位carry截尾truncation四舍五入round下舍入round down上舍入round up有效数字significant digit无效数字insignificant digit代数algebra公式formula, formulae(pl.)单项式monomial多项式polynomial, multinomial系数coefficient未知数unknown, x-factor, y-factor, z-factor 等式,方程式equation一次方程simple equation二次方程quadratic equation三次方程cubic equation四次方程quartic equation不等式inequation阶乘factorial对数logarithm指数,幂exponent乘方power二次方,平方square三次方,立方cube四次方the power of four, the fourth power n次方the power of n, the nth power开方evolution, extraction二次方根,平方根square root三次方根,立方根cube root四次方根the root of four, the fourth root n次方根the root of n, the nth root集合aggregate元素element空集void子集subset交集intersection并集union补集complement映射mapping函数function定义域domain, field of definition值域range常量constant变量variable单调性monotonicity奇偶性parity周期性periodicity图象image数列,级数series微积分calculus微分differential导数derivative极限limit无穷大infinite(a.) infinity(n.) 无穷小infinitesimal积分integral定积分definite integral不定积分indefinite integral 有理数rational number无理数irrational number实数real number虚数imaginary number复数complex number矩阵matrix行列式determinant几何geometry点point线line面plane体solid线段segment射线radial平行parallel相交intersect角angle角度degree弧度radian锐角acute angle直角right angle钝角obtuse angle平角straight angle周角perigon底base边side高height三角形triangle锐角三角形acute triangle直角三角形right triangle直角边leg斜边hypotenuse勾股定理Pythagorean theorem钝角三角形obtuse triangle不等边三角形scalene triangle等腰三角形isosceles triangle等边三角形equilateral triangle四边形quadrilateral平行四边形parallelogram矩形rectangle长length宽width附:在一个分数里,分子或分母或两者均含有分数。
routing酒店用语 -回复

routing酒店用语-回复在酒店业中,routing是指将客人分配到适当房间或区域的过程,同时提供满足客人需求的服务。
合理且高效的routing流程对于酒店的运营至关重要,它直接关系到客户体验和酒店的声誉。
本文将详细介绍routing 酒店用语,并以中括号内的内容为主题,一步一步解答。
I. Routing的概念和重要性Routing,即分配和安排经营场所或设备的操作计划,以最大限度地满足客人的需求和要求。
在酒店业中,routing的目的是将客人分配到最适合他们需求和预算的房间,并确保顺畅的服务流程。
[什么是routing酒店用语?]Routing酒店用语是指酒店业中常用的术语和短语,主要涉及到房间分配、服务安排以及满足客户需求的操作计划。
Routing的重要性不言而喻。
它能够提高客人的满意度和忠诚度,从而增加酒店的业务量和盈利能力。
良好的routing流程能够确保客人在酒店入住期间的顺利和舒适,并为酒店创造良好的口碑。
II. Routing酒店用语的常见术语和短语在routing酒店用语中,有一些常见的术语和短语,下面将一一介绍和解释。
1. Room Type (房间类型):用于描述不同房间的种类和配置。
常见的房间类型包括标准间、豪华间、套房等。
2. Room Allocation (房间分配):指将预订的客人分配到具体的房间的过程。
酒店根据客人的需求和预订情况,将他们分配到合适的房间。
3. Room Availability (房间可用性):指酒店中各类房间的可供出租数量。
酒店需要实时了解房间可用性,以便进行合理的房间分配。
4. Room Rate (房价):指房间的销售价格。
房价可能会根据季节、房间类型和客人身份等因素而有所变化。
5. Occupancy Rate (入住率):指酒店房间的使用率,通常以百分比表示。
计算方法为已入住房间数除以总房间数。
6. Check-in (办理入住手续):客人到达酒店后,在前台办理入住手续的过程。
高斯常见错误

高斯常见错误第一篇:高斯常见错误近来一直在学习高斯,因为不精通常遇到各种错误。
结合自学的东西和查阅的资料总结出来一些错误,希望对和我一样的高斯初学者有所帮助。
1、Q:Error termination in NtrErr: ntran open failure returned to fopen.Segmentation fault E:Can't open a file.2、Q:Internal consistency error detected in FileIO for unit 1 I= 4 J=0 I Fail= 1.E:Gaussian is limited to 16 GB of scratch space on the 32-bit nodes.3、Q:Out-of-memory error in routine UFChkP(IEnd= 12292175MxCore= 6291456)Use %Mem=12MW to provide the minimum amount of memory required to complete this step.Error termination via Lnk1e at Thu Feb 2 13:05:32 2006.Eefault memory(6 MW, set in $GAUSS_MEMDEF)is too small for unfchk.4、Q:galloc: could not allocate memory.: Resource temporarily unavailable orOut-of-memory error in routine...orEnd of file in GetChg.Error termination via Lnk1e...E:Not enough memory.5、Q:IMax=3 JMax=2 DiffMx= 0.00D+00Unable to allocate space to process matrices in G2DrvN:NAtomX= 58 NBasis= 762 NBas6D= 762 MDV1= 6291106 MinMem= 105955841.E:Gaussian has 6 MW free memory(MDV1)but requires at least 106 MW(MinMem).6、Q;Estimate disk for full transformation-677255533 words.Semi-Direct transformation.Bad length for file.E:MaxDisk has been set too low.7、Q:Error termination in NtrErr:NtrErr Called from FileIO.E:The calculation has exceeded the maximum limit of maxcyc.8、Q:Erroneous read.Read 0instead of 6258688.fd = 4g_readE:Disk quota or disk size exceeded.Could also be disk failure or NFS timeout.9、Q:Erroneous write.Write 8192 instead of 12288.fd = 4E:Disk quota or disk size exceeded.Could also be disk failure or NFS10、Q:orig len = 12288 left = 12288 g_writeE:timeout11、另有link错误:如:Error termination request processed by link 9999对于优化不收敛,即L9999错误,实际上是在规定的步数内没有完成优化,即还没有找到极小值点。
java中routine方法

java中routine方法(原创实用版4篇)篇1 目录1.Java 中的 routine 方法概述2.routine 方法的定义与调用3.routine 方法的参数4.routine 方法的返回值5.routine 方法的实际应用篇1正文【1.Java 中的 routine 方法概述】在 Java 编程语言中,routine 方法(也称为方法)是一种可重用的代码块,用于执行特定的任务。
通过将代码组织成方法,可以提高代码的可读性和可维护性。
在 Java 中,方法可以被看作是程序的“routine”,即例行操作。
【2.routine 方法的定义与调用】要定义一个 routine 方法,需要使用关键字`public`、`private`或`protected`来指定方法的访问权限,然后是方法名和括号`()`。
方法名表示方法的具体操作,括号内可以包含参数。
例如:```javapublic static void showMessage(String message) {System.out.println(message);}```这是一个公共的 routine 方法,名为`showMessage`,它接受一个字符串参数`message`,并在控制台输出该消息。
要调用一个 routine 方法,只需在需要调用方法的地方编写方法名并传入参数,如下所示:```javapublic static void main(String[] args) {showMessage("Hello, World!");}```【3.routine 方法的参数】routine 方法可以接受任意数量的参数。
参数在方法定义时指定,并在调用方法时传入。
参数类型必须与方法定义中的参数类型匹配。
例如:```javapublic static int add(int a, int b) {return a + b;}```这个 routine 方法接受两个整数参数`a`和`b`,并返回它们的和。
QUEST物流优化4
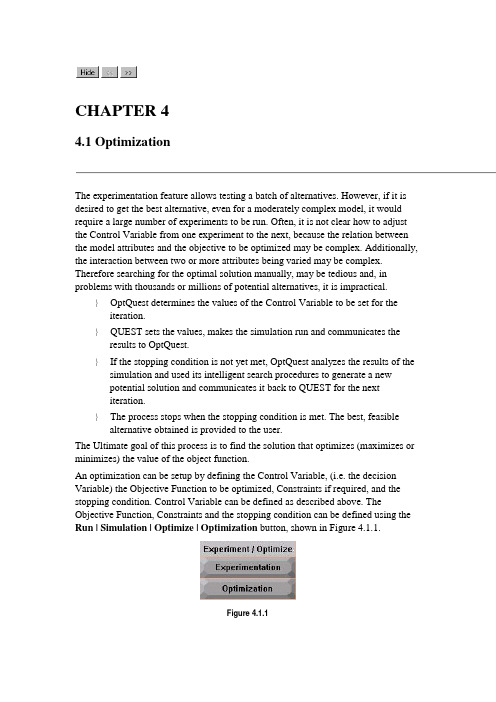
CHAPTER 44.1 OptimizationThe experimentation feature allows testing a batch of alternatives. However, if it is desired to get the best alternative, even for a moderately complex model, it would require a large number of experiments to be run. Often, it is not clear how to adjust the Control Variable from one experiment to the next, because the relation between the model attributes and the objective to be optimized may be complex. Additionally, the interaction between two or more attributes being varied may be complex. Therefore searching for the optimal solution manually, may be tedious and, in problems with thousands or millions of potential alternatives, it is impractical.⎬OptQuest determines the values of the Control Variable to be set for the iteration.⎬QUEST sets the values, makes the simulation run and communicates the results to OptQuest.⎬If the stopping condition is not yet met, OptQuest analyzes the results of the simulation and used its intelligent search procedures to generate a newpotential solution and communicates it back to QUEST for the nextiteration.⎬The process stops when the stopping condition is met. The best, feasible alternative obtained is provided to the user.The Ultimate goal of this process is to find the solution that optimizes (maximizes or minimizes) the value of the object function.An optimization can be setup by defining the Control Variable, (i.e. the decision Variable) the Objective Function to be optimized, Constraints if required, and the stopping condition. Control Variable can be defined as described above. The Objective Function, Constraints and the stopping condition can be defined using the Run | Simulation | Optimize | Optimization button, shown in Figure 4.1.1.Figure 4.1.1Selecting the Optimization button, displays a dialog box shown in Figure 4.1.2, that allows the definition of the objective function, Constraints and the stopping Condition.Figure 4.1.24.2 Stopping ConditionThe process of finding an optimal solution may take a very long time. At times it may not be practical to wait until the optimal solution is obtained. The option is to accept a near optimal solution within a definite timeframe or a fixed number of iterations, by defining the stopping condition.Number of Iterations: This determines the number of iterations to be performed before the optimization stops. Increasing the number of runs increases the likelihood of finding better solutions to the problem. For example, if the user has set the number of runs to 100, the optimizer runs for 100 iterations and provides the best result of all the 100 runs.Stop Time: This is similar to the number of runs but instead of terminating the optimization after a certain number of iterations, the optimization will terminate after the specified time has elapsed. The units are the current model units. Forexample, if the stop time is 600 seconds, then the optimization will stop after 600 seconds.Auto Stop: This is yet another criteria to stop the optimization. The options are Yes & No. If this is set to "Yes", the optimization will stop when the optimizer determines that the solution is unlikely to improve any further.4.3 ReplicationsA certain number of replications are required for each iteration in order to determine, with a given confidence, that the true objective value lies within a given percentage of the mean of the replications. Following attributes need to be set to enable this. Replication Mode: This is a mode with two options,1. Fixed Number (default) &2. Confidence IntervalFixed Number: In this mode a fixed number of replications are made. For example, if the Number of Replications is set to 4 then each iteration exactly 4 replications will be run.Confidence Interval: In the mode, the number of replications will depend on the required Confidence Level and the permitted Error subject to a set minimum & maximum replications. These parameters can be set using the "Confidence Interval" button in this dialog. This button is enabled only if the Replication Mode is Confidence Interval.Number of Replications: This is a integer that sets the number of replications that have to be run for every iteration. In Confidence Interval Mode, it is the minimum number of replications.Note: A replication within a particular iteration starts with different random number seeds. Hence the results of each replication could be different, although the Control Variable values for all replications within an iteration remain the same. This is particularly useful in testing the hypothesis using confidence intervals.Figure 4.3.1Confidence Interval: This button allows setting of parameter for calculating the confidence interval. It is enabled only if the Replication Mode is set to Confidence Interval. Clicking this button will give a dialog will see three items,⎬Confidence Level: This is the required confidence level for the estimate of the objective value. There are 6 options 80% (default), 90%, 95%, 99%and 99.9%⎬Error: This is the allowed error in the estimate, as a percentage of the mean. The smaller the permissible error, more the number of replicationswill be required for the same confidence level. The default value is 10%If it is desired to get the optimal solution, this option should be set to No and, Number of Iterations and Stop Time should be set to arbitrarily large values.If all the three parameters are set, then the optimization will stop at the earliest terminating parameter. For example, if the number of runs is 100 and stop time is 600 seconds and the auto stop is set to Yes, the optimization will stop after 100 iterations if they are not completed within 600 seconds, and if the optimizer does not stop the process because it has determined that the optimal solution is unlikely to improve any further. Otherwise the optimization will stop after a total of 600 seconds. If the user wants to run till the optimal solution is found, then the number of runs and stop time must be set to arbitrarily high values and the auto stop option must be set to No.4.4Objective FunctionAn optimization problem needs an objective function i.e. the function to be either minimized or maximized. On selecting the "Objective Function" button in the "Optimization Setup" dialog, a dialog to define the Objective Function is displayed as shown in Figure 4.4.1Figure 4.4.1Optimization Type: This has 2 options, either Maximize or Minimize. It determines whether the goal of optimization is to maximize or minimize the Objective Function. Objective Function: The Objective Function to be optimized should be specified here. The function can be any SCL Expression or a pre-compiled SCL routine thatevaluates to a Real value. The value of the objective function is evaluated after very simulation run and is fed back to OptQuest. For Example,Total_Profit() - SCL routine that returns a numerical value.Ctrl_Var_1->value - 2*Ctrl_Var_2->value + Ctrl_Var_3->value SCL Expression of consisting of Control (decision) Variable.4.5 ConstraintsOptimization problems may subject to certain constraints like budget constraints, quality level constraints, or resource constraints. A solution is said to be infeasible if any of the constraints is violated. Users can Add, Modify or Delete constraints through "Constraints" button in the "Optimization Setup" dialog. Selecting this button gives the dialog shown in Figure 4.5.1.Fiure 4.5.1Adding and Modifying Constraints: New constraints can be added or existing constraints can be modified using this "Add/Modify" button in the above dialog box. On selecting this button, a dialog box is given allowing the selection of existing constraints, if any (including "New" option). On selecting the constraint, a dialog shown in Figure 4.5.2 is given.Figure 4.5.2Name: This is the constraint name. It should be a unique name. The default names are "Constraint_1", "Constraint_2"......Expression Mode: There is two modes of specifying constraints, either as an "SCL expression" or "Mathematical".SCL Expression: Through this mode, the constraint is specified as an SCL Expression or a pre-compiled SCL routine that evaluates to a Real value. The SCL expression could be either linear or non-linear. This allows the Quest users to add complex constraints through SCL. For example, Total_Cost() is a pre-compiled SCL routine.Mathematical: Constraint defined through the Mathematical mode must be linear expressions that consist of only Control Variable defined in the model. In the example shown in figure below, Conv1_speed and Conv2_speed are Control Variable defined in the model. The expression is a linear combination of only Control Variables and hence qualifies as to be defined in the Mathematical mode.Figure 4.5.3Notes: a. Constraints with an expression that is a non-linear combination of Control Variable cannot be defined using the Mathematical mode, they have to be defined using the SCL mode.b. During optimization, Mathematical expressions are evaluated and checked by OptQuest, before suggesting a solution to QUEST. Therefore any solution that violates any such constraints is not considered and hence not simulated. While, the constraints in the SCL expression mode are evaluated after every iteration by QUEST and the result is returned to OptQuest, which when accepts or rejects the solution depending on whether a constraint is satisfied or not. Therefore defining as many constraints using the Mathematical mode as possible enhances the efficiency of the optimization. However the SCL Expression mode offer greater flexibility and complex constraints can be modeled.A Constraint has three parts, the LHS (left-hand side) Expression, the relationship and the RHS (right-hand side) value.Expression: The expression can be any SCL Expression, a pre-compiled SCL routine that evaluates to a Real value or an expression that is linear combination of the defined Control Variable.Relationship: The constraint relationship can be either >= (greater than or equal) <= (less than or equal) or = (equal) to the RHS value that is specified by the user. Itdefines the relationship that must be satisfied by any feasible solution between the Expression and the RHS Value.RHS Value: This is the value, a real number that is a limiting value of the constraint's expression.Deleting a Constraint: An existing constraint can be deleted, using the "Delete" button in the Constraint Setup dialog. On selecting this button the user is given a dialog to select any of the defined constraint. The selected constraint is deleted.4.6 Suggesting SolutionsThe user can suggest solutions, if the user has a guess about the possible solutions for the possible solutions for the optimization problem. Suggested solutions can shorten the time it takes to find an optimal solution. The suggested solutions are to be added before the optimization is started. These solutions are evaluated early in the optimization. It is not necessary to suggest a solution for every Control Variable. If suggested values are constraint-infeasible, they are mapped to feasible solutions and evaluated. As a result, the exact suggested values may not be evaluated, since they might be changed to make them feasible.Selecting the "Suggested Solution" button gives a table dialog, with existing Control Variable in the columns. The table is provided with one extra row to add a new solution. Default values are the average of the minimum and maximum limit of the variable. The existing values of any solutions can be modified.Figure 4.6.14.7 Run OptimizationAfter setting up the optimization, the optimization can be conducted using the "Run Optimization" button in the "Optimization Setup" dialog. However, if the information is incomplete or incorrect, the optimization will not run, but appropriate error messages will be displayed.The optimization process starts with OptQuest assigning a set of values to the Control Variable for that particular iteration. QUEST sets these values on the Control Variable and the runs the simulation. The output of the simulation is used to evaluate the Objective Function and SCL Expression constraints, if any. These results are returned back into the OptQuest. Then OptQuest analyzes these results and returns the settings for the next iteration. This process continues till the stopping criteria are fulfilled.The simulation runs are conducted with Animation off and the Restore Random Seeds mode set to No. Clicking on the QUEST window can interrupt the optimization process. This will give a dialog to terminate or continue the optimization. When the optimization is terminated, the best solution so far is provided to the user.During the optimization process, an optimization chart is plotted, with Objective Function value (on Y-axis) against the iteration number (on X-axis) as shown in Figure 4.7.1. The user can monitor the change in the Objective function value as the optimization process proceeds. The following figure shows a sample of the Optimization chart. The Objective function values for only feasible iterations are plotted, i.e. the infeasible solutions are not plotted.Figure 4.7.14.8 Continuing OptimizationThe "Continue" button allows the users to continue the optimization by making additional iterations after the defined number of iterations are complete. Selecting this button, given a dialog to enter the additional iterations. The optimization will continue for the additional number of iterations.Note: When "Continue" button is enabled, the some items in the main dialog are disabled. "Objective Function", "Constraints", "Suggested Solutions" - these buttons along with "Replication Mode" list item are disabled. This is to ensure that the optimizing conditions do not vary for a single run.4.9 Reporting the resultsThe "Report" button in the dialog allows the report of the optimization results to be customized. This button gives a dialog which allows the user to display "n-best" solutions of the optimization. The "Save to File" button can be used to save this report to a file. It allows the user to select a HTML file in REPORT$lib. The report is written to the selected file.Figure 4.9.1Figure 4.9.2。
信息技术服务_运行维护 第2部分:交付规范

(报批稿)
××××-××-××发布
××××-××-××实施
中华人民共和国工业和信息化部
发布
1
SJ/T × × × × × .2—201×
目 次
前 言 ............................................................................... 引 言 .............................................................................. I 1 范围 ................................................................................ 1 2 规范性引用文件 ...................................................................... 1 3 术语和定义 .......................................................................... 1 4 运行维护服务交付框架 ................................................................ 2 5 交付管理 ............................................................................ 2 6 交付内容 ............................................................................ 4 7 交付方式 ............................................................................ 5 8 交付成果 ............................................................................ 7 附 录 A ............................................................................... 9 附 录 B .............................................................................. 12 附 录 C .............................................................................. 13 参考文献 ............................................................................. 14
ANSYSOptimizationModuleManual:ANSYS优化模块手册

/en/ANSYS TutorialDesign Optimization of a Plate with a HoleThis word document was downloaded from the website: /en/, please remain this linkinformation when you reproduce , copy, or use it.A square plate with a hole in the center has a uniform pressure of 10 ksi applied to the hole. The objective of this example is to use the design optimization feature in ANSYS to modify the dimensions of the plate and the hole in order to minimize the volume of the plate without exceeding a maximum von Mises stress of 32.5 ksi.One quarter of the plate will be modeled and Plane 2 elements with a default mesh density will be used.Design Variables:This model will have the plate height, width, thickness and the radius of the hole parameterized. TheState Variable:The maximum von Mises equivalent stress will be limited to 32.5 ksi.Design Objective:Minimize the volume of the plate.The plate has a Young’s Modulus of 30x103ksi and Poisson’s Ratio of 0.3.The following is the step-by-step procedure for the beam deflection problem using the ANSYS GUI (Graphic User Interface) environment. Using the left button of the mouse, click on everything that is typed bold and type everything that is italicized below.1. Define the design variables and their initial values.(Go to Utility Menu)ParametersScalar ParametersSelection enter: H = 12 & A ccept(set initial height to 12 cm)Selection enter: W = 12 & Accept(set initial width to 12 cm)Selection enter: R = 1.5 & Accept(set initial hole radius to 1.5 cm)Selection enter: T = 0.2 & Accept(set initial thickness to 0.2 cm)ClosePlotCtrlsNumbering(Go to LINE and click) OFF (then OFF will be toggled to ON) & OK2. Define the element type, the plate thickness and material properties.(Go to Main Menu)PreprocessorElement TypeAdd/Edit/DeleteAddStructural & Solid & Triangle 6 node 2 & OKOptionsElement Behavior: Plane strs w/thk & OKReal ConstantsAdd/Edit/DeleteAdd & Triangl 6 node 2 & OKThickness: T & OK(defines thickness as a parameter w hich can vary) Material PropsMaterial ModelsStructural & Linear & Elastic & IsotropicEX = 30e3PRXY = 0.3 & OK3. Create the model using variables for the dimensions (parameterized model).ModelingCreateA reasRectangleBy Dimensions(Click X1 box) 0 (Click X2 box) W(Click Y1box) 0 (Click Y2 box) H & OKCircleSolid CircleRadius = R & OKOperateBooleansSubtractA reasClick the Square & A pplyClick the circle & OK4. Mesh the domain.MeshingMesh ToolClick on the Lines Set buttonPick lines 2 & 3 & A pplyNDIV = 6 & A pplyPick lines 9 & 10 & 5 & A pplyNDIV = 10 & OKClick the Mesh ButtonSelect the area & OK5. Apply the loads and boundary conditions.SolutionDefine LoadsApplyStructuralDisplacementSymmetry B.C.On LinesPick lines 9 & 10 & OKPressureOn LinesPick line 5 & OKVALUE load PRES value = 18.5 & OK 6. Solve the initial configuration.SolveCurrent LSClick OKClose Information and STAT Command windows 7. Review the results for the initial configuration.General Post ProcPlot ResultsContour PlotNodal SolutionStress & Von Mises (SEQV) & OKList Results (sorts nodes from largest to smallest stress) Sorted ListingSort NodesStress & von Mises (SEQV) & OK8. Create result tables that will be used in optimization sequence.(Go to Utility Menu)Parameters (defines max. stress for optimization routine) Get Scalar DataResults Data & Global Measures & OKStress & von MisesName of Parameter to be defined: SMA XOK(Go to Main Menu)General PostprocElement TableDefine Table (Creates table listing the volume of each element) AddLab: VOLUMEGeometry & Elem volume VOLUOKCloseSum of Each Item & OK (Calculates the overall volume of plate)Close the SSUM Command window(Go to Utility Menu)ParametersGet Scalar DataResults Data & Elem Table Sums & OKName of Parameter to be defined: VOLUMEOK9. Write the log file that ANSYS w ill run during each step in the optimization process.FileWrite DB Log File (Writes list of commands entered to this point) Enter: Plate & OK10. Set up the optimization process.(Go to Main Menu)Design OptAnalysis FileCreate & OKAssignType Plate & OK(Name of log file written in previous step)11. Enter the design variables that will be modified during optimation and their range of values.Design VariablesAddSelect H (sets height range between 10 and 15 cm) MIN = 10MAX = 15 & A pplySelect W(sets w idth range between 10 and 15 cm) MIN = 10MAX = 15 & A pplySelect R (sets hole radius betw een 1 and 2.5 cm) MIN = 1MAX = 2.5 & A pplySelect T(sets thickness betw een 0.1 and 0.25 cm) MIN = 0.1MAX = 0.25 & OKClose Design Variable window12. Enter the limits to the design. In this example, the stress in the plate can not exceed 32.5ksi.State VariablesAddSelect SMA X(sets max. allow able von Mises stress to 32.5 ksi) MAX = 32.5 & OK13. Define the objective that you are trying to optimize. In this example you w ant to minimize the volume.Objective[OPVAR] Define Objective Function: VOLUMENAME Parameter Name: Select VOLUME & OK14. Select the protocol that ANSYS w ill use to optimize the problem and the number of iterations it w ill use.Method/ToolSelect Sub-Problem & OKMaximum Iterations: 10 & OK15. Run the optimization.RunBegin Execution of Run window appears, click OKClose Execution Summary and Note windows 16. Review the results from the 10 iterations.Design SetsList & OKThe table shows that Sets 3, 4, 5, 6 and 8 are infeasible because they exceed the maximum allowable von Mises stress (The variable exceeded is highlighted with an ‘>’).The table shows that Set 11 is the optimal set (which is denoted by the *) having a volume of10.124 in3 and a maximum von Mises stress of 32.435 ksi.17. Graph the design variables and maximum stress for the 10 iterations.Close the OPLIST Command windowGraphs/TablesXVAROPT: Select SMA XNVAR: Select H, R, T, and W & OK18. Enter in the parameters from the best set, solve, and view the results.(Go to Utility Menu)ParametersScalar ParametersSelection enter: H = value of best set & A cceptSelection enter: W = value of best set & A cceptSelection enter: R = value of best set & A cceptSelection enter: T = value of best set & A cceptClose(Go to Main Menu)SolutionSolveCurrent LS & OKGeneral Post ProcPlot ResultsContour PlotNodal SolutionStress & Von Mises (SEQV) & OKThis word document was downloaded from the website: /en/, please remain this linkinformation when you reproduce , copy, or use it.。
alternating optimization的例子

alternating optimization的例子全文共四篇示例,供读者参考第一篇示例:交替优化方法(Alternating Optimization)是一种在优化问题中常用的方法,它通过交替更新多个变量来逐步优化整体目标函数。
在实际应用中,交替优化方法被广泛应用于各种领域,如机器学习、图像处理、信号处理等。
本文将通过一个简单的例子来介绍交替优化方法的原理和应用。
假设我们有一个二元分类问题,目标是要找到一个分类器,将两类样本正确地分开。
我们使用支持向量机(SVM)作为分类器,并采用交替优化方法来求解SVM的参数。
假设我们的目标函数是:\[\min_{w,b} \frac{1}{2}||w||^2 + C\sum_{i=1}^{n} max(0,1-y_i(w\cdot x_i + b))\]\(w\)是权重向量,\(b\)是偏置项,\(C\)是正则化参数,\((x_i,y_i)\)是样本数据,\(y_i \in \{-1, 1\}\)表示样本的类别。
为了求解上述优化问题,我们可以采用交替优化方法。
具体步骤如下:1. 初始化参数\(w\)和\(b\)为0;2. 交替更新参数\(w\)和\(b\),直到收敛:- 固定\(b\),更新\(w\):根据上述目标函数的梯度,我们可以用梯度下降法更新权重向量\(w\);- 固定\(w\),更新\(b\):更新偏置项\(b\),使得约束条件\(1-y_i(w\cdot x_i + b) \leq 0\)成立;3. 重复步骤2,直到收敛。
通过交替更新\(w\)和\(b\),我们可以逐步优化SVM的参数,使得分类器能够更好地拟合训练数据,并达到更好的分类性能。
交替优化方法的优点在于它能够在参数空间中高效地搜索最优解,同时能够处理复杂的非凸优化问题。
除了在机器学习中的应用,交替优化方法还被广泛应用于其他领域。
在图像处理中,交替优化方法可以用于图像去噪、图像超分辨率、图像分割等任务中。
电站检修运维英语
电站检修运维英语Title: Power Plant Maintenance and Operations: Ensuring Efficiency and ReliabilityPower plants play a critical role in generatingelectricity to meet the demands of modern society. To ensure the continuous and efficient operation of these facilities, meticulous maintenance and effective operations management are indispensable. In this essay, we delve into the key aspects of power plant maintenance and operations, highlighting the strategies, challenges, and best practices involved.1. **Routine Maintenance Procedures**:- Scheduled Inspections: Regular inspections of equipment and infrastructure components such as turbines, boilers, transformers, and cooling systems are conducted to detect potential issues before they escalate.- Preventive Maintenance: Planned maintenance activities, including lubrication, cleaning, and parts replacement, are carried out to prevent equipment failures and optimize performance.- Predictive Maintenance: Utilization of advanced monitoring technologies such as vibration analysis, thermography, and oil analysis to predict equipment failures and schedule maintenance accordingly, minimizing downtime and reducing costs.2. **Emergency Response and Repair**:- Rapid Response Teams: Trained personnel are available around the clock to address emergency situations such as equipment breakdowns, power outages, or safety hazards.- Spare Parts Management: Maintaining an inventory of critical spare parts ensures prompt replacement during emergencies, minimizing downtime and preventing significant disruptions to power generation.3. **Safety Protocols and Compliance**:- Adherence to Regulations: Compliance with industry standards and regulations, including safety protocolsoutlined by relevant authorities, is paramount to ensure the well-being of personnel and the surrounding environment.- Training and Education: Continuous training programsare provided to employees to enhance their understanding of safety procedures, emergency protocols, and equipment operation, fostering a culture of safety within the workforce.4. **Efficiency Optimization**:- Performance Monitoring: Continuous monitoring of key performance indicators (KPIs) such as heat rate, fuel consumption, and efficiency metrics enables operators to identify opportunities for optimization and implement corrective actions.- Energy Management Systems: Implementation of advanced control systems and automation technologies to optimize energy production, minimize waste, and reduce operational costs while maintaining reliability and stability.5. **Environmental Sustainability**:- Emission Control Measures: Adoption of emission control technologies such as selective catalytic reduction (SCR), electrostatic precipitators (ESP), and flue gas desulfurization (FGD) systems to mitigate the environmental impact of power generation activities.- Renewable Integration: Integration of renewable energy sources such as solar, wind, and hydroelectric power into existing power plant operations to diversify the energy portfolio, reduce greenhouse gas emissions, and promote sustainable practices.6. **Data Analytics and Predictive Maintenance**:- Big Data Analytics: Utilization of data analytics tools and algorithms to analyze large volumes of operational data, identify patterns, and optimize maintenance schedules,resulting in improved asset reliability and reducedoperational costs.- Condition Monitoring: Implementation of remotemonitoring systems and sensor technologies to continuously assess equipment health and performance, enabling predictive maintenance strategies and early fault detection.In conclusion, effective maintenance and operations management are essential for ensuring the efficiency, reliability, and sustainability of power plants. By implementing robust maintenance practices, prioritizing safety, optimizing efficiency, and embracing technological advancements, power plant operators can overcome challenges and deliver reliable electricity to meet the needs of society.。
Vehicle routing problem with time windows

Discrete OptimizationVehicle routing problem with time windows and alimited number of vehiclesHoong Chuin Laua,*,Melvyn Sim b ,Kwong Meng TeocaDepartment of Computer Science,School of Computing,National University of Singapore,3Science Drive 2,117543SingaporebOperations Research Center,Massachusetts Institute of Technology,Cambridge,MA 02139,USAcSavy Technology Asia Pte Ltd.,Technology Park@Chai Chee,469001SingaporeAbstractThis paper introduces a variant of the vehicle routing problem with time windows where a limited number of vehicles is given (m -VRPTW).Under this scenario,a feasible solution is one that may contain either unserved customers and/or relaxed time windows.We provide a computable upper bound to the problem.To solve the problem,we propose a tabu search approach characterized by a holding list and a mechanism to force dense packing within a route.We also allow time windows to be relaxed by introducing the notion of penalty for lateness.In our approach,customer jobs are inserted based on a hierarchical objective function that captures multiple objectives.Computational results on benchmark problems show that our approach yields solutions that are competitive to best-published results on VRPTW.On m -VRPTW instances,experiments show that our approach produces solutions that are very close to computed upper bounds.Moreover,as the number of vehicles decreases,the routes become more densely packed monotically.This shows that our approach is good from both the optimality as well as stability point of view.Ó2002Elsevier Science B.V.All rights reserved.Keywords:Tabu search;Heuristics;Routing;Combinatorial optimization;Vehicle routing problem with time windows1.IntroductionMany practical transport logistics and distri-bution problems can be formulated as a vehicle routing problem whose objective is to obtain a minimum-cost route plan serving a set of customers with known demands.Each customer is assigned to exactly one vehicle route and the total demand of any route must not exceed the vehicle capacity.To date,most of the proposed algorithms as-sume that the number of vehicles is unlimited,and the objective is to obtain a solution that either minimizes the number of vehicles and/or total travel cost.However,transport operators in the real world face resource constraints such as a fixed fleet.The question we like to ask is,if the given problem is over-constrained in the sense of insuf-ficient vehicles,what constitutes a good solution and how may we find one?In this paper,we provide some insights to this question.In our view point,it is desirable to have an algorithm that not only performs well given a*Corresponding author.E-mail addresses:lauhc@.sg (u),melvyn@ (M.Sim),kmteo@ (K.M.Teo).0377-2217/03/$-see front matter Ó2002Elsevier Science B.V.All rights reserved.doi:10.1016/S0377-2217(02)00363-6European Journal of Operational Research 148(2003)559–569standard VRPTW problem,but also handles over-constrained problems well in the following sense: 1.Optimality:It returns solutions which serve(orpack)as many customers as possible as the pri-mary objective,while optimizing standard crite-ria such as the number of vehicles and distance travelled.2.Stability:It degrades gracefully under con-strainedness,i.e.when the number of vehicles is reduced,the customer packing density,defined as the average number of customers per vehicle in service,must be monotically increasing,al-though the total number of customers served will become less.This paper proceeds as follows.Wefirst introduce the problem(m-VRPTW)and a computable upper bound to the problem.We then present a tabu search approach with the following characteristics: (a)a holding list to accommodate unserved cus-tomers;(b)a mechanism that introduces new vehicles in stages so as to force denser customer packing within a route.We then extend the algo-rithm to a generalization of the problem with re-laxed time windows.In terms of computational results,experiments on VRPTW benchmark problems show that our approach can produce solutions that are very close to previous best-published results.What is more interesting perhaps is the performance on m-VRPTW instances.Results show that our approach produces solutions that are very close to computed upper bounds.Moreover,as the number of vehicles is reduced,the average number of customers per route is monotically increasing.This shows that our approach is good from both the optimality as well as stability point of view.2.Literature reviewThe primary objective of m-VRPTW is to maximize the number of customers served,which is NP-hard,sincefinding it is a generalization of the multiple constrained knapsack problem.Al-though the classical VRPTW has been the subject of intensive research since the80s,to our knowl-edge,there has been little research work on m-VRPTW.We give some research developments in VRPTW.SolomonÕs insertion heuristics[18]is the seminal work behind heuristic construction algo-rithms.Many efficient heuristic and meta-heuristic approaches have been proposed recently,including the works of Chiang and Russell[5],Potvin and Rousseau[14],Rochat and Taillard[15],Taillard et al.[20],and Thangiah et al.[21].More recently, Schulze and Fahle[19],Gehring and Homberger [9]proposed new parallel tabu search heuristics that enable large-scale VRPTW instances to be solved.Several works have been carried out advocat-ing the hybrid use of constraint programming and local search.For example,Pesant and Gendreau [13]applied constraint programming to evaluate the local neighborhood tofind the best local moves.There is also constrained-directed local search proposed in[1,11,17].In[17],for example, the author presented a method called large neigh-borhood search(LNS)for VRP in which a part of a given solution is extracted and then reinserted into the partial solution using a quasi-complete search process.If the reinsertion procedure gen-erated a better solution,then the solution is kept. This process is repeated until certain stopping criterion is met.The result produced with this technique is competitive with other meta-heuristic approaches.In terms of exact algorithms,Desrochers et al.[6]has applied column generation that was able to solve some100-customer problems optimally. Based on this,Kohl et al.[12]developed a more efficient optimization algorithm by introducing a new valid inequality within a branch-and-cut algorithm,called k-path cuts,which solves70of the87Solomon benchmark problems to optimal-ity.However,due to the exponential size of the solution space,it is unlikely that these optimization procedures can be used for larger-scale problems.3.Problem definition and notationThe standard VRPTW problem is defined for-mally as:Given an undirected graph GðV;AÞu et al./European Journal of Operational Research148(2003)559–569where V ¼f v 0;v 1;...;v n g ,v 0is the depot,v i ,i ¼0is a customer with demand d i ,time windows (e i ;l i )and service duration s i ;A ¼fðv i ;v j Þ:i ¼j ,v i ;v j 2V g ,each arc (v i ;v j )having a travel distance (time)t ij ;and vehicle capacity Q ,find a minimum set of vertex-disjoint routes starting and ending at depot v 0such that each customer v i is served by exactly one vehicle within its time windows,P d i for all customers v i served by each vehicle is less than Q ,and the total distance travelled is mini-mized (as the secondary objective function).m -VRPTW is defined formally as:Given m (number of vehicles)and a VRPTW instance,find m or less routes with the primary objective func-tion of maximizing total number of customers served,and the secondary objective function of minimizing the total distance travelled.4.Upper bound for m -VRPTWIn this section,we determine an upper boundfor the total number of customers that can be served by a given fixed number of vehicles.We propose an integer programming (IP)formulation.The IP formulation should be able to solve large-scale problems,yet not be overly simplified such that the gap of the bound from the optimum is too wide.We have adopted a formulation that ac-counts for the capacity constraints of the vehicles as well as the time constraints imposed by the latest return times of every vehicle to the depot.The upper bound is derived by solving a relaxation of m -VRPTW,formulated as follows.Define U ¼f 1;2;...;m g to be the indices of the set of m serving vehicles and V c to be the set of customer nodes (excluding the node at the depot).Define r i ¼min j ;j ¼i t ij ,i ;j 2V which is the travel-ing time from node i to its nearest neighbor.This quantity is used to lower bound the travel time from node i to any other node.Let w i ¼l i þs i þt i 0,i 2V c denote the time of return to the depot after serving node i as its last customer at its latest start time.Without loss of generality,assume that all w i s do not exceed the depot close time.Let G ¼½g 1;g 2;...;g m be a list of m unique customers in V such that w i P w j for all i 2G and j 2G .Since vehicles are identical,the melements of G represent the latest possible times of return to the depot for each of the m vehicles,for a solution to be feasible.The decision variables are denoted by x ij 2f 0;1g ,i 2V c ,j 2U where x ij ¼1if and only if the customer at node i is served by vehicle j .The following IP returns the upper bound of the total number of customers served by all the vehicles:max X i 2V c Xj 2Ux ij s :t :Xj 2Ux ij 61;8i 2V cð1ÞXi 2V cx ij d i 6Q ;8j 2Uð2ÞXi 2V cx ij ðs i þr i Þþr 06w g j ;8j 2Uð3Þx ij 2f 0;1g ;8i 2V c ;j 2UConstraints (1)state that all customers must be assigned to at most 1vehicle.Constraints (2)ensure that the vehicle capacity constraint is not violated.Constraints (3)impose some linear tim-ing constraints:it says that for each vehicle,the earliest possible time of returning to the depot (induced by the assignment x )cannot exceed the latest possible return time (imposed by G ).Note that in this formulation,we ignore the full con-siderations of time window constraints and the actual travel time between two nodes.The bound is thus expected to be less effective on test cases with tight time window constraints.Note that the above formulation gives us a constrained knapsack problem ,which is NP-hard.Fortunately,many variants and generalizations of the knapsack problem have been well-studied there exist exact algorithms which are computationally efficient,such as [22].5.Standard two-phase methodMost of recently published VRPTW heuris-tics are two-phase approaches.First,a construc-tion heuristic is used to generate a feasible and as good as possible initial solution.Then,an iterative improvement heuristic is applied to this solution.u et al./European Journal of Operational Research 148(2003)559–569561It generates successive solutions by searching the neighborhood of the current solution.In the sec-ond phase,various methods are then used to pre-vent the algorithms from being trapped at local optimal and to explore a larger search space.The construction phase involves insertion of all the customers into a set of feasible vehicles routes. The purpose of the construction phase is to pro-vide an initial feasible ually,each customer will be inserted in turn to the route that gives the minimum additional cost or distance at that instance.The order of customer selection then defines the heuristics,some of which are listed follows:•Nearest insertion rule:Next nearest unserved customer will be selected.•Earliest ready time rule:Next unserved cus-tomer with the earliest ready time will be se-lected.•Window tightness rule:Next unserved customer with the tightest time window will be selected. Observe that these heuristics assume that there are enough vehicles to serve all the customers.As such,for over-constrained problems,these heu-ristics may fail to deliver satisfactory solutions.Given the initial feasible solution from phase I, the phase II route improvement phase involves an iteration of moving from a feasible solution to its feasible neighborhood until certain termi-nating condition is met.In this phase,the heuris-tics are defined by the neighborhood structure,the choice of the next move,and the terminating condition.The simplest approach of the steepest descent algorithm chooses the best and improved solution among all the neighboring solutions at every iter-ation.However,the algorithm would very quickly be trapped within a local minimum.The neighborhood structure used is usually a k-opt local search procedure,where k refers to the number of customers/arcs that can be inter-changed from the initial solution to its neighbor-hood solutions.Some of these interchanges are •Relocate:Customer from one route transfers to another route.•Exchange:Customer from one route exchanges position with another customer in another route.The quality of a two-phase method depends on whether the choice of construction and improve-ment heuristics is a goodfit to the nature of the search space.The construction heuristics should produce a good enough initial location such that the improvement algorithm starts in a region where good solutions can be achieved.Subse-quently,the improvement heuristics would need to be able to bypass sufficiently many local minima to terminate at a good solution.6.Proposed algorithmThe above-mentioned two-phase method would normally have to work differently for an over-constrained problem.One way is to use the inser-tion heuristic to determine whether the problem instance is feasible.Following which,we have two sets of heuristics to handle separately the infeasi-ble case and the feasible case.Another approach is to increase enough vehicles so as to serve all customers,and then,through subsequent heuris-tics,try to obtain a subset of the solution that maximizes the number of customers that can be served.However,there are pitfalls in both of these approaches.Though thefirst seems credible,it demands extensive use of heuristics and does not value-add in terms of algorithm development.The second approach is not addressing the issue of infeasibility directly,and is therefore unlikely to give a good solution consistently.We therefore seek to have a generalized method to handle both feasible and infeasible problem in-stances.The approach to such an algorithm lies in the introduction of the holding list,the data structure that contains unserved customers.Al-though the idea of holding list is not new atfirst sight(for example,the ILOG Dispatcher product uses the same idea),our overall algorithmic strat-egy of transferring customers back and forth the holding list under our tabu search strategy(see below)is,to our knowledge,a novel idea.u et al./European Journal of Operational Research148(2003)559–5696.1.Holding listThe holding list contains the list of the cus-tomers that are not served in the current solution. The idea of introducing a holding list is triggered by the role of artificial variables in the phase I of the simplex algorithm.A feasible solution of the VRPTW is found when all the customers are dri-ven out of the holding list,which is analogous to driving out all the artificial variables from the simplex tableau.The holding list will induce an extended neigh-borhood search space,which includes the follow-ing moves,in addition to the basic relocate and exchange moves discussed in Section5:•Relocate from holding list:Transferring a cus-tomer from holding list to an existing route.•Relocate to holding list:Transferring a cus-tomer from an existing route to the holding list.•Exchange with holding list:Exchanging a cus-tomer from an existing route with another cus-tomer in the holding list.The holding list is similar to a‘‘phantom’’route which participates in the regular local search,with a variant that insertion of a customer to the hold-ing list is always feasible and does not incur any cost.The customers of a selected route will be searched completely for possible of transfer to/ from or exchange with customers in the holding list.The next accepted move is determined by using a best improvement strategy depicted in the hierarchical cost structure.6.2.Hierarchical cost structurem-VRPTW introduces the additional objective of maximizing the number of served customers and minimizing lateness(if time windows can be relaxed).This implies that the objective function becomes a composite function:•maximize total number of customers served,•minimize total number of customer served late (if allowed),•minimize total lateness duration(if allowed),•minimize total number of vehicle used,•minimize total distance traveled.One possible way of dealing with multi-criteria objective is to define a composite cost function with different weights for the different cost pa-rameters.However,setting the proper weights becomes a tricky(or almost impossible)mission, and the resulting function becomes meaningless to interpret.Our approach is to define a hierarchical cost structure.For example,serving more customers is always better regardless of the number of vehicles used.Although one can argue that theÔbig MÕapproach on the composite cost function can be used to enforce the hierarchy,we believe our ap-proach is a cleaner way.We propose a hierarchical cost structure in decreasing order of priority of the above list of objectives.In hierarchical cost comparison between two states(during local search),the state with greater preference down the hierarchy of importance as-sumes aÔlower costÕ.As opposed to the composite cost function,where the total composite cost is computed,hierarchical cost is never computed. This is because in local search techniques,com-putation of the absolute cost is not needed. Rather,the hierarchical cost is used for comparing the current solution state with the previous best solution state.6.3.Tabu search strategyAlthough many construction and local im-provement techniques have been reported to solve VRPTW problems,it is unclear how these heuris-tics will behave when constrained by a limited vehiclefleet.Particularly,it is unclear how the two-phase approach can work co-operatively in ensur-ing the ultimate solution to have good customer packing while not exceeding the prescribed vehicle limit.For instance,if we use too few vehicles in the construction phase,it may limit the search space of the local improvement phase;on the other hand,if we use up to the maximum allowable number of vehicles,then it leaves little room for the local search phase to add more unserved customers, since all routes have been used up.The outcomeu et al./European Journal of Operational Research148(2003)559–569563may be a solution where some of the routes are relatively loosely packed,but no more customers can be added to any one of them unless drastic changes are made to the solution,which local search,by its nature,is incapable of realizing.To deal with limited vehiclefleet,our strategy is to meld the two-phase approach into a nested approach.The idea is to increase the number of vehicles in stages and at each stage,apply standard tabu search to maximize the number of customers to be inserted onto those vehicles.Within each stage,the number of vehicles isfixed and hence the search will not consider adding a vehicle to serve unassigned customers.In other words,we steer the tabu search to favor packing of customers within the existing routes.With certain abuse of termi-nology to draw parallelism with duality,the dual of the vehicle minimization problem is the maxi-mization of customer packing problem.Empirical results have shown that this strategy has tremen-dous improvement of packing density on Solomon test cases,without having to rely on a set of good construction heuristics.With the incorporation of the holding list,it is easy to implement the tabu search strategy dis-cussed above.The hierarchical cost structure fa-vors transfer of customers from the holding list to the routes.Unlike many tabu search algorithms, where the search space is always feasible,the holding list is a neat way of incorporating local search towards a path of feasibility that favors customer packing.Let TS denote one iteration of a standard tabu search procedure with the search neighborhood and hierarchical cost structure discussed in Sec-tions6.1and6.2respectively.The tabu list stores customers that have been moved within the preced-ing number of iterations defined by the tabu length.A move is tabu if and if only the customers are in the tabu list and it is not aspired by being better than the best solution so far,in the sense of the hierarchical cost function defined in Section6.2.Let StepSize denote the additional number of vehicles introduced in each stage.Let numVeh denote the current number of vehicles used,ini-tialized to StepSize.Let CountLimit denote the maximum number of non-improving moves using numVeh vehicles.The algorithm proceeds as follows(refer to Algorithm A).The holding list initially contains all customers of the given instance.We introduce StepSize additional number of vehicles(i.e.empty routes)in each stage.Each stage is implemented by the while loop(i.e.steps(3)to(6)).When TS is called in step(4),it will return a solution which differs from the previous solution by a local move made with respect to the neighborhood and the hierarchical cost structure.In step(5),a better solution means that the hierarchical cost objective value is better than that of the best solution found so far.If a better solution has not been found after CountLimit consecutive tries,then the stage ends, and the algorithm proceeds to the next stage by adding more vehicles.Algorithm A(1)until holding list is empty or numVeh¼m(2)set Count¼0(3)while Count6CountLimit(4)call TS based on numVeh vehicles(5)if better solution found then set Count¼0else set Count¼Countþ1(6)endwhile(7)set numVeh¼minðnumVehþStepSize;mÞ(8)end until6.4.m-VRPTW with relaxed TWsThe logical extension to solving m-VRPTW problems is to relax the time window constraints. In other words,we allow late arrivals after the intended due time to increase the number of cus-tomers that could be served.Although one could perceive this as a separate objective that may entail a separate algorithm,our challenge is to incorpo-rate this feature into one seamless generalized al-gorithm.We define late period to be the amount of late-ness between the time windows upper bound and the actual arrival time(and0if the arrival time lies within the time window).We impose the late pe-riod as a soft time constraint which can be vio-lated.This is done by incorporating the number of late arrivals and the total late period into the hi-erarchical cost function.u et al./European Journal of Operational Research148(2003)559–569Intuitively,by relaxing the time window con-straints,we would expect to have improved solu-tions(in terms of its objective value).However, from experimentation with our proposed local search technique,we discovered an anomaly that the solution for some cases become worse if we relax the constraints as it is.This is illustrated in the sample run in solving an over-constrained Solo-mon benchmark problem R103with13vehicles. Without relaxing the time windows,the total late period is0,while with relaxed time windows,the late period became77.8units!This contradicts with the intuition that with relaxed time windows,the solution obtained from local search will always be an improvement.As local search techniques do not guarantee global optimality,it is likely that even with relaxed constraints the reported solution may be worse off.To deal with this anomaly,we propose Algo-rithm B.Here,wefirst solve the problem without relaxing the time windows.The solution then be-comes the initial feasible solution for the problem with relaxed time windows.In the latter case,more customers may be inserted from the holding list, albeit at the expense of relaxed time windows.In this manner,we can always guarantee improve-ment,if any,on the relaxed problem.Table1pre-sents the new result obtained for R103under this new scheme.Algorithm B(1)call Algorithm A(2)if holding list not empty(3)relax time windows constraints(3)set Count¼0(4)repeat steps(2)to(7)of Algorithm A 7.Results and analysisIn this section,we present experimental results of applying our algorithm to solve both the stan-dard VRPTW as well as m-VRPTW problems. In our experiments,we set the tabu length to be 100.We set the values of CountLimit and Step-Size in Algorithm A to be500and1respec-tively.We refer to our implementation as the OV method.7.1.Performance on VRPTW problemsHere,we test the performance of Algorithm A on the set of56SolomonÕs test cases with100 customers.The run time of the algorithm tested on a Pentium II433machine is about1min on average.Wefirst compare our results with the overall best-published heuristics results.1The comparison of solutions is presented in Table2,where the Best and OV columns contain the best published and our results respectively.Next,we also compare our results with the specific results of(a)Rochat and Taillard[15] (RT),(b)Chiang and Russell[3](CR),(c)Taillard et al.[20](TBGGP),(d)Homberger and Gehring [10](HG),and(e)Cordeau et al.[4](CLM).A summary of the comparison is given in Table3. We observe that although our results are in general inferior compared to these results,they are within only several percent worse on average.We believe this is justifiable,in two sense.First,our goal is in obtaining results within1min on average and hence set the maximum number of iterations to 500.This is in contrast to the other methods which typically require hours of CPU time on compatibleTable1Consistency of solution with relax TWsWithout relaxed time windows With relaxed time windows#Vehicles1313#Customersinserted99100#Customersserved late02 Total late period015.7921Contributions to the best-published results are taken from: Cordeau et al.[4]––R107,R108,RC104,RC106,R204,RC201, RC207,Chiang and Russell[3]––R207,Homberger and Geh-ring[10]––R103,R109,R112,R201,R203,R208,R210,R211, C202,RC203,RC204,RC205,R110,Rousseau et al.[16]––R111,RC105,R202,R205,R209,RC206,RC208,Rochat and Taillard[15]––R101,R104,R105,R106,C101,C102,C103, C104,C105,C106,C107,C108,C109,RC103,R206,C201, C202,C203,C204,C205,C206,C207,C208,R102,Taillard et al.[20]––RC101,RC102,RC107,RC108.u et al./European Journal of Operational Research148(2003)559–569565machines.Second,this work is not aimed at beating the best VRPTW results,but rather on proposing an algorithm that works well when limited to a number of vehicles.7.2.Performance on m-VRPTWTo assess the performance of our algorithm on m -VRPTW,we will measure the total number ofTable 3Summary of comparisonRTCR TBGGP HG CLM OV C1mean no of vehicles 10.0010.0010.0010.0010.0010.00C1mean distance832.59828.38828.38828.38828.38832.13C2mean no of vehicles 3.00 3.00 3.00 3.00 3.00 3.00C2mean distance595.38591.42589.86589.86589.86589.86R1mean no of vehicles 12.8312.1712.1711.9212.0812.16R1mean distance1208.431204.191209.351220.971210.141211.55R2mean no of vehicles 3.18 2.73 2.82 2.73 2.73 3.00R2mean distance999.63986.32980.27968.55969.581001.12RC1mean no of vehicles 12.7511.8811.5011.5011.5012.25RC1mean distance1381.331397.441389.221388.241389.781418.77RC2mean no of vehicles 3.62 3.25 3.38 3.25 3.25 3.37RC2mean distance1207.371229.541117.441140.431134.521170.93Table 2OV solutions against best-published resultsBest OV Best OV VehiclesDistance Vehicles Distance Vehicles Distance Vehicles Distance C10110828.9410828.94R11291003.73101021.95C10210828.9410834.64R20141252.3741292.53C10310828.0610834.56R20231191.7031158.98C10410824.7810846.32R2033942.643980.70C10510828.9410828.94R2042849.623847.74C10610828.9410828.94R2053994.4231146.80C10710828.9410828.94R2063912.9731007.00C10810828.9410828.94R2072914.393869.94C10910828.9410828.94R2082731.232790.46C2013591.563591.56R2093909.8631020.06C2023591.563619.36R2103955.3931032.65C2033591.173604.01R2112910.093866.10C2043590.63644.23RC101141696.94151657.46C2053588.883601.43RC102121554.75131535.79C2063588.493588.88RC103111262.02121386.03C2073588.293608.94RC104101135.48101213.25C2083588.323591.83RC105131633.72151625.13R101191650.8201765.00RC106111427.13121426.07R102171486.12181548.61RC107111230.54111330.59R103131292.85141258.34RC108101139.82101175.88R10410982.01101018.48RC20141406.9441468.46R105141377.11151462.69RC20231389.5741222.69R106121252.03121328.66RC20331060.4531171.88R107101113.69121160.08RC2043799.123839.32R1089964.38101045.83RC20541302.4241338.70R109111194.73131259.09RC20631153.9331201.27R110101124.4111127.70RC20731062.0531139.48R111101096.72111097.10RC2083829.693985.60u et al./European Journal of Operational Research 148(2003)559–569。
lop方法
lop方法
LOP方法是一种广泛应用于机器学习和数据处理领域的算法。
它的全称是局部优化算法(Local Optimum Path),通过在搜索空间中寻找局部最优解来实现问题的优化。
在LOP方法中,我们首先需要定义问题的目标函数,这个函数用来衡量不同解的优劣。
然后,我们从一个初始解开始,通过一系列的迭代步骤来搜索邻域中的更优解。
在每一步中,我们根据目标函数的变化情况来判断是否接受新解。
如果新解更优,则更新当前解为新解,否则保持当前解不变。
通过不断迭代,最终得到一个局部最优解。
LOP方法的优势在于它可以快速找到问题的局部最优解。
因为它只关注当前解的邻域,而不是整个搜索空间,所以在大规模问题中,LOP方法的效率通常比全局优化方法高。
此外,LOP方法还可以应用于非线性问题,因为它不需要求解数学公式或计算公式。
然而,LOP方法也存在一些限制。
首先,它只能找到局部最优解,可能无法找到全局最优解。
因此,在使用LOP方法时,我们需要根据具体情况来判断是否满足问题的要求。
其次,LOP方法的性能高度依赖于初始解的选择。
如果初始解离全局最优解较远,那么LOP 方法可能会陷入局部最优解而无法跳出。
总的来说,LOP方法是一种简单而有效的优化算法。
它可以在大规
模问题中快速找到局部最优解,并且适用于各种类型的问题。
当我们面临一个需要优化的问题时,LOP方法是一个值得考虑的选择。
通过合理地定义目标函数和选择初始解,我们可以充分发挥LOP方法的优势,得到一个满意的解。
Python最优化算法实战学习笔记

Python最优化算法实战第一章最优化算法概述1.1最优化算法简介最优化算法,即最优计算方法,也是运筹学。
涵盖线性规划、非线性规划、整数规划、组合规划、图论、网络流、决策分析、排队论、可靠性数学理论、仓储库存论、物流论、博弈论、搜索论和模拟等分支。
当前最优化算法的应用领域如下。
(1)市场销售:多应用在广告预算和媒体的选择、竞争性定价、新产品开发、销售计划的编制等方面。
如美国杜邦公司在20世纪50年代起就非常重视对广告、产品定价和新产品引入的算法研究。
(2)生产计划:从总体确定生产、储存和劳动力的配合等计划以适应变动的需求计划,主要采用线性规划和仿真方法等。
此外,还可用于日程表的编排,以及合理下料、配料、物料管理等方面。
(3)库存管理:存货模型将库存理论与物料管理信息系统相结合,主要应用于多种物料库存量的管理,确定某些设备的能力或容量,如工厂库存量、仓库容量,新增发电装机容量、计算机的主存储器容量、合理的水库容量等。
(4)运输问题:涉及空运、水运、陆路运输,以及铁路运输、管道运输和厂内运输等,包括班次调度计划及人员服务时间安排等问题。
(5)财政和会计:涉及预算、贷款、成本分析、定价、投资、证券管理、现金管理等,采用的方法包括统计分析、数学规划、决策分析,以及盈亏点分析和价值分析等。
(6)人事管理:主要涉及以下6个方面。
①人员的获得和需求估计。
②人才的开发,即进行教育和培训。
③人员的分配,主要是各种指派问题。
④各类人员的合理利用问题。
⑤人才的评价,主要是测定个人对组织及社会的贡献。
⑥人员的薪资和津贴的确定。
(7)设备维修、更新可靠度及项目选择和评价:如电力系统的可靠度分析、核能电厂的可靠度B风险评估等。
(8)工程的最佳化设计:在土木,水利、信息电子、电机、光学、机械、环境和化工等领域皆有作业研究的应用。
(9)计算机信息系统:可将作业研究的最优化算法应用于计算机的主存储器配置,如等候理论在不同排队规则下对磁盘、磁鼓和光盘工作性能的影响。
routine函数

Routine函数中的特定函数1. 函数定义在分析routine函数中的特定函数之前,我们首先要了解routine函数的定义。
routine函数是一个用于创建和管理计划任务的函数,它可以让我们在指定的时间间隔内执行特定的任务。
在编程中,我们经常需要定期执行一些任务,例如定时备份数据、定期发送电子邮件等,这时候routine函数就派上了用场。
2. 特定函数的用途routine函数中的特定函数有多种用途,下面我们将详细介绍其中一些常用的特定函数及其用途。
2.1. scheduleschedule函数用于定义计划任务的执行时间。
它接受一个时间表达式作为参数,用来指定任务的执行时间。
时间表达式可以是一个具体的日期和时间,也可以是一个时间间隔。
schedule函数的用途是让我们能够灵活地设置计划任务的执行时间,可以根据需求指定任务的执行频率,例如每天、每周、每月或每年执行一次。
这样可以确保任务按照预定的时间执行,提高了任务的可靠性和准确性。
2.2. tasktask函数用于定义要执行的任务。
它接受一个函数作为参数,这个函数就是我们要执行的任务。
在task函数中,我们可以编写任意的代码,实现我们需要的功能。
task函数的用途是将我们的任务封装成一个函数,以便在计划任务执行时调用。
通过将任务封装成函数,我们可以更好地组织代码,提高代码的可读性和可维护性。
2.3. run_pendingrun_pending函数用于执行计划任务。
它会检查当前时间是否到达任务的执行时间,并执行相应的任务。
如果当前时间没有到达任务的执行时间,run_pending函数会立即返回,不会等待。
run_pending函数的用途是实际执行计划任务。
它会根据定义的计划任务执行时间来判断是否执行任务,并调用相应的任务函数。
通过调用run_pending函数,我们可以实现计划任务的自动执行,节省了手动执行任务的时间和精力。
2.4. run_allrun_all函数用于立即执行所有计划任务。
全局优化控制策略global_optimization
10
Global Optimization Uses a Backward Model, Based on Look-up Tables
ICE ESS ICE ESS ACC ICE GEN
Thermal Elec. Mech.
ACC MG1 MANETARY DRIVELINE DRIVELINE DRIVELINE
2
PHEVs Come in Various Powertrain Configurations: How to Compare Them?
Plug‐in Hybrid Electric Vehicles (PHEVs) combine:
– long range, high power density and easy energy refill – low tailpipe emissions, high fuel displacement (on short daily trips)
11
Optimization Problem
State: Battery State‐of‐charge (SOC) Command u:
– g gear and engine g torque q ( (Parallel) ) – generator power (Series) – engine power (Power‐split)
SOC
0.3
0.5
0.6
time
Plug‐to‐Wheel Wh/km
Outline
Introduction Vehicle Sizing Global Optimization Algorithm Simulation Results Conclusion
运营解决方案英文

运营解决方案英文1. Process AutomationOne of the most effective operational solutions for businesses is process automation. Automation can help businesses streamline repetitive tasks, reduce errors,and increase efficiency. By automating routine tasks such as data entry, invoice processing, and inventory management, businesses can free up valuable time and resources that can be used for more productive activities. Process automation can also help businesses reduce costsby minimizing the need for manual labor and lowering the risk of human error.2. Cloud ComputingCloud computing has revolutionized the way businesses store, manage, and access data. By moving theiroperations to the cloud, businesses can reduce the needfor expensive hardware and software, improveaccessibility and flexibility, and increase security and backup capabilities. Cloud computing can also help businesses scale their operations more easily, as theycan quickly add or remove resources as needed. This canbe especially valuable for businesses that experience fluctuating demand or growth.3. Data AnalyticsData analytics has become an essential tool forbusinesses looking to improve their operations. Byanalyzing data from various sources, businesses can gain valuable insights into their operations, customer behavior, and market trends. This information can be used to identify areas for improvement, make more informed decisions, and develop more effective strategies. Data analytics can also help businesses identify potential issues before they become problems and monitor performance in real time.4. Supply Chain ManagementEffective supply chain management is essential for businesses to ensure the smooth flow of goods and services. By optimizing their supply chain operations, businesses can reduce lead times, minimize inventory costs, and improve overall efficiency. This can be achieved by implementing advanced planning and scheduling tools, improving relationships with suppliers and partners, and leveraging technology to track and manage inventory and shipments.5. Lean OperationsLean operations is a strategy that focuses on reducing waste and improving efficiency. By identifying and eliminating inefficiencies in their operations, businesses can improve productivity, reduce costs, and enhance competitiveness. Lean operations principles can be applied across various areas of a business, including manufacturing, administration, and service delivery. Byembracing a continuous improvement mindset, businessescan create a culture of innovation and efficiency.6. Customer Relationship ManagementBuilding and maintaining strong relationships with customers is essential for the success of any business.By implementing a robust customer relationship management (CRM) system, businesses can better understand their customers' needs, preferences, and behaviors. This information can be used to tailor products and services, improve customer satisfaction, and increase loyalty. CRM systems can also help businesses track and analyze customer interactions, manage sales and marketing efforts, and improve overall customer satisfaction.7. Risk ManagementManaging risks is a critical part of running a successful business. By identifying potential risks and developing strategies to mitigate them, businesses can reduce the likelihood of negative outcomes and protect their operations. Effective risk management involves conducting regular assessments, implementing appropriate controlsand processes, and developing contingency plans for potential disruptions. By proactively managing risks, businesses can better protect their assets, reputation, and bottom line.In conclusion, operational solutions play a critical role in the success of businesses. By embracing innovativetechnologies, analyzing data, optimizing processes, and managing risks, businesses can improve their operations, reduce costs, and enhance their overall performance. Implementing these operational solutions can help businesses stay competitive and adapt to the constantly changing business environment.。
优化设计方案 英文

优化设计方案英文Optimizing Design SolutionDesign optimization is a crucial process in product development, as it ensures that the final outcome meets the desired performance and efficiency standards. By optimizing the design, it is possible to improve the overall quality of the product, minimize production costs, and enhance customer satisfaction. In this article, we will discuss several key steps in optimizing the design solution.The first step in optimizing the design is to clearly define the project goals and requirements. This involves understanding the purpose of the product, identifying the target audience, and determining the desired performance metrics. By having a clear understanding of the project goals, designers can focus their efforts on the most critical aspects of the design.Once the project goals are defined, it is essential to conduct thorough research. This involves gathering information about current market trends, competitor products, and customer preferences. Research provides valuable insights that can guide the design process and help identify potential areas for improvement. For example, understanding competitor products can highlight any gaps in the market that the design solution could fill.After conducting research, it is time to brainstorm and generate multiple design concepts. This step encourages creativity and allows for a wide range of ideas to be considered. Each design concept should be evaluated based on its feasibility, performance, and compatibility with the project goals. It is important to involvethe entire design team in this process to ensure diverse perspectives and ideas.Once a set of design concepts has been generated, it is time to proceed with the detailed design phase. At this stage, designers need to address all technical considerations, create detailed 2D and 3D models, and perform virtual or physical prototyping. The detailed design phase allows the design team to identify any potential issues and make necessary modifications before moving forward.After completing the detailed design phase, it is important to conduct rigorous testing and analysis. This involves simulating real-world conditions, performing reliability tests, and evaluating the performance of the design against the project goals. Testing helps identify any design flaws or weaknesses and allows for further optimization. It is essential to iterate through the testing and analysis phase multiple times to refine the design and ensure optimal performance.Finally, the last step in optimizing the design solution is to consider manufacturability and cost. Designers need to ensure that the chosen design can be easily manufactured, assembled, and maintained. This involves considering manufacturing processes, selecting appropriate materials, and minimizing the number of components. Additionally, cost optimization involves finding the right balance between production costs and the perceived value of the product.In conclusion, optimizing the design solution is vital for achievingproduct success. By clearly defining project goals, conducting thorough research, generating multiple design concepts, performing detailed design and testing, and considering manufacturability and cost, designers can create a high-quality and efficient product that meets customer expectations. The design optimization process requires collaboration and iterative improvements, ensuring continuous enhancement of the product's design.。
Matlab optimization-toolbox
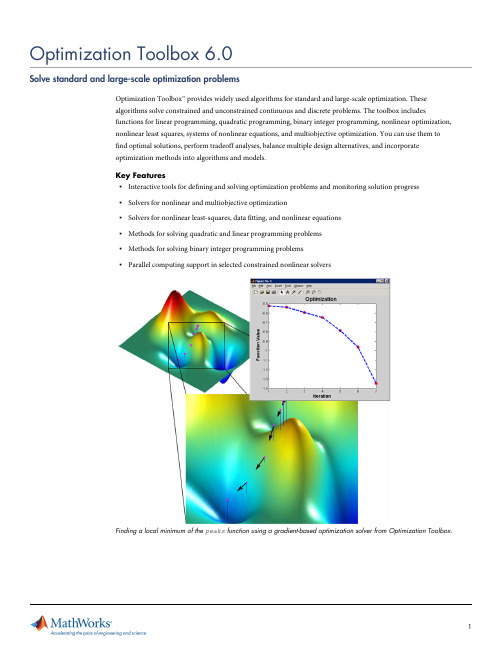
Finding a local minimum of the peaks function using a gradient-based optimization solver from Optimization Toolbox.A blurred image recovered using the large-scale linear least-squares algorithm.Defining, Solving, and Assessing Optimization ProblemsOptimization Toolbox includes the most widely used methods for performing minimization and maximization. The toolbox implements both standard and large-scale algorithms, enabling you to solve problems by exploiting their sparsity or structure. You can access toolbox functions and solver options with the Optimization Tool or atthe command line.An optimization routine running at the command line (left) that calls MATLAB files defining the objective function (top right) and constraint equations (bottom right).The Optimization Tool simplifies common optimization tasks. It enables you to:▪Select a solver and define an optimization problem▪Set and inspect optimization options and their default values for the selected solver▪Run problems and visualize intermediate and final results▪View solver-specific documentation in the optional quick reference window▪Import and export problem definitions, algorithm options, and results between the MATLAB®workspace and the Optimization Tool▪Automatically generate MATLAB code to capture work and automate tasks▪Access Global Optimization Toolbox solversNonlinear ProgrammingOptimization Toolbox provides widely used optimization algorithms for solving nonlinear programming problems in MATLAB. The toolbox includes solvers for unconstrained and constrained nonlinear optimization and solvers for least-squares optimization.Unconstrained Nonlinear OptimizationOptimization Toolbox uses three algorithms to solve unconstrained nonlinear minimization problems:▪The Quasi-Newton algorithm uses a mixed quadratic and cubic line search procedure and the Broyden-Fletcher-Goldfarb-Shanno (BFGS) formula for updating the approximation of the Hessian matrix.▪The Nelder-Mead algorithm (or downhill simplex) is a direct-search algorithm that uses only function values (does not require derivatives) and handles nonsmooth objective functions.Global Optimization Toolbox provides additional derivative-free optimization algorithms for nonlinear optimization.▪The trust-region algorithm is used for unconstrained nonlinear problems and is especially useful forlarge-scale problems where sparsity or structure can be exploited.Unconstrained nonlinear programming used to search an engine performance map for peak efficiency.Constrained Nonlinear OptimizationConstrained nonlinear optimization problems are composed of nonlinear objective functions and may be subject to linear and nonlinear constraints. Optimization Toolbox uses four algorithms to solve these problems:▪The interior point algorithm is used for general nonlinear optimization. It is especially useful for large-scale problems that have sparsity or structure, and tolerates user-defined objective and constraint functionevaluation failures. It is based on a barrier function, and optionally keeps all iterates strictly feasible with respect to bounds during the optimization run.▪The SQP algorithm is used for general nonlinear optimization. It honors bounds at all iterations and tolerates user-defined objective and constraint function evaluation failures.▪The active-set algorithm is used for general nonlinear optimization.▪The trust-region reflective algorithm is used for bound constrained problems or linear equalities only. It is especially useful for large-scale problems.The interior point and trust-region reflective algorithms enable you to estimate Hessians using different approaches.For the interior point algorithm, you can estimate Hessians using:▪BFGS (dense)▪Limited memory BFGS (for large-scale problems)▪Hessian-multiply function▪Actual Hessian (sparse or dense)▪Finite difference of gradients, without requiring knowledge of sparsity structureFor the trust-region reflective algorithm, you can use:▪Finite difference of gradients, Hessian with known sparsity structure▪Actual Hessian (sparse or dense)▪Hessian-multiply functionAdditionally, the interior point and trust-region reflective algorithms enable you to calculate Hessian-times-vector products in a function without having to form the Hessian matrix explicitly.Optimization Toolbox also includes an interface to Ziena Optimization’s KNITRO®libraries for solving constrained nonlinear optimization problems.Constrained nonlinear programming used to design an optimal suspension system.Multiobjective OptimizationMultiobjective optimization is concerned with the minimization of multiple objective functions that are subject to a set of constraints. Optimization Toolbox provides functions for solving two formulations of multiobjective optimization problems:▪The goal attainment problem involves reducing the value of a linear or nonlinear vector function to attain the goal values given in a goal vector. The relative importance of the goals is indicated using a weight vector.The goal attainment problem may also be subject to linear and nonlinear constraints.▪The minimax problem involves minimizing the worst-case value of a set of multivariate functions, possibly subject to linear and nonlinear constraints.Optimization Toolbox transforms both types of multiobjective problems into standard constrained optimization problems and then solves them using an active-set approach.Global Optimization Toolbox provides an additional multiobjective solver for nonsmooth problems.Multiobjective optimization used to design a low-pass filter.Nonlinear Least-Squares, Data Fitting, and Nonlinear EquationsOptimization Toolbox can solve linear and nonlinear least-squares problems, data fitting problems, and nonlinear equations.Linear and Nonlinear Least-Squares OptimizationThe toolbox uses two algorithms for solving constrained linear least-squares problems:▪The medium-scale algorithm implements an active-set algorithm and is used to solve problems with bounds and linear inequalities or equalities.▪The large-scale algorithm implements a trust-region reflective algorithm and is used to solve problems that have only bound constraints.The toolbox uses two algorithms for solving nonlinear least-squares problems:▪The trust-region reflective algorithm implements the Levenberg-Marquardt algorithm using a trust-region approach. It is used for unconstrained and bound-constrained problems.▪The Levenberg-Marquardt algorithm implements a standard Levenberg-Marquardt method. It is used for unconstrained problems.Fitting a transcendental equation using nonlinear least squares.Data FittingThe toolbox provides a specialized interface for data fitting problems in which you want to find the member of a family of nonlinear functions that best fits a set of data points. The toolbox uses the same algorithms for data fitting problems that it uses for nonlinear least-squares problems.Fitting a nonlinear exponential equation using least-squares curve fitting.Nonlinear Equation SolvingOptimization Toolbox implements a dogleg trust-region algorithm for solving a system of nonlinear equations where there are as many equations as unknowns. The toolbox can also solve this problem using the trust-regionreflective and Levenberg-Marquardt algorithms.Solving an n-dimensional Rosenbrock function using the nonlinear equation solver.Linear ProgrammingEngineers and scientists use mathematical modeling to describe the behavior of systems under study.System requirements, when defined mathematically as constraints on the decision variables input into the mathematical system model, form a mathematical program.This mathematical program, or optimization problem description, can then be solved using optimization techniques.Linear programming is one class of mathematical programs where the objective and constraints consist of linear relationships.Linear programming problems consist of a linear expression for the objective function and linear equality and inequality constraints. Optimization Toolbox includes three algorithms used to solve this type of problem:▪The interior point algorithm is based on a primal-dual predictor-corrector algorithm used for solving linear programming problems. Interior point is especially useful for large-scale problems that have structure or can be defined using sparse matrices.▪The active-set algorithm minimizes the objective at each iteration over the active set (a subset of the constraints that are locally active) until it reaches a solution.▪The simplex algorithm is a systematic procedure for generating and testing candidate vertex solutions to alinear program. The simplex algorithm is the most widely used algorithm for linear programming.Linear programming used in the design of a plant for generating steam and electrical power.Binary Integer ProgrammingBinary integer programming problems involve minimizing a linear objective function subject to linear equality and inequality constraints. Each variable in the optimal solution must be either a 0 or a 1.Optimization Toolbox solves these problems using a branch-and-bound algorithm that:▪Searches for a feasible binary integer solution▪Updates the best binary point found as the search tree grows▪Verifies that no better solution is possible by solving a series of linear programming relaxation problemsBinary integer programming used to solve an investment problem.Quadratic ProgrammingQuadratic programming problems involve minimizing a multivariate quadratic function subject to bounds, linear equality, and inequality constraints. Optimization Toolbox includes three algorithms for solving quadratic programs:▪The interior-point-convex algorithm solves convex problems with any combination of constraints.▪The trust-region-reflective algorithm solves bound constrained problems or linear equality constrained problems.▪The active-set algorithm solves problems with any combination of constraints.Both the interior-point-convex and trust-region-reflective algorithms are large-scale, meaning they can handle large, sparse problems. Furthermore, the interior-point-convex algorithm has optimized internal linear algebraroutines and a new presolve module that can improve speed, numerical stability, and the detection of infeasibility.Quadratic programming used to perform a returns-based style analysis for three mutual funds.Solving Optimization Problems Using Parallel ComputingOptimization Toolbox can be used with Parallel Computing Toolbox™to solve problems that benefit from parallel computation. You can use parallel computing to decrease time to solution by enabling built-in parallel computing support or by defining a custom parallel computing implementation of an optimization problem.Built-in support for parallel computing in Optimization Toolbox enables you to accelerate the gradient estimation step in select solvers for constrained nonlinear optimization problems and multiobjective goal attainment andminimax problems.Accelerating time to solution for an electrostatics problem using the built-in support for parallel computing in a nonlinear programming solver. The built-in functionality is enabled by specifying the UseParallel option (left) for the objective (middle right) and constraint (bottom right) functions, with the solution shown in the top right.You can customize a parallel computing implementation by explicitly defining the optimization problem to use parallel computing functionality. You can define either an objective function or a constraint function to useparallel computing, enabling you to decrease the time required to evaluate the objective or constraint.Product Details, Demos, and System Requirements/products/optimizationTrial Software/trialrequestSales/contactsalesTechnical Support/support Accelerating time to solution (top right) for a suspension system design (bottom left and bottom right) subject to uncertainty by customizing the objective function with a single line change in code (top left).ResourcesOnline User Community /matlabcentral Training Services /training Third-Party Products and Services /connections Worldwide Contacts /contact。
日常养护施工集约化管理方案

日常养护施工集约化管理方案English Response:Introduction:Routine maintenance operations play a pivotal role in preserving the integrity and longevity of anyinfrastructure or facility. Implementing a centralized management system for routine maintenance activities ensures efficient scheduling, resource allocation, and quality control, leading to improved operational efficiency and extended asset life. This multifaceted plan outlines a comprehensive strategy for integrating routine maintenance operations into a single, coordinated system.Objectives:The primary objectives of this management plan are as follows:Enhance operational efficiency by streamlining scheduling, work order management, and resource allocation.Improve quality control through standardized procedures, inspections, and performance monitoring.Extend asset life by proactive maintenance and preventive measures.Reduce maintenance costs through optimized scheduling and resource utilization.Improve compliance with regulatory requirements and industry best practices.Scope:This plan encompasses all routine maintenanceactivities for the following infrastructure elements:Building systems (HVAC, electrical, plumbing, etc.)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Appellants asserted that the claimed conditions produced unexpected results
4
In re Aller, 220 F.2d 454, 105 USPQ 233 (CCPA 1955)
Appellants contended that the claimed conditions would not have been discovered by one skilled in the F.2d 454, 105 USPQ 233 (CCPA 1955)
Invention: process for production of phenols using sulfuric acid with acetone as a byproduct
Claimed process was identical to prior art except for lower temperatures and higher sulfuric acid concentrations
Prior art acetone yield was about 60% while Appellants’ acetone yield was 71 - 88%
Examiner asserted that the claimed conditions resulted from routine experimentation to determine the optimum reaction condition
Claims: 25 - 70% H2SO4 at 40 - 80° C Prior Art: 10% H2SO4 at 100 ° C
3
In re Aller, 220 F.2d 454, 105 USPQ 233 (CCPA 1955)
Prior art phenol yield was 75% while Appellants showed phenol yields from 83.7 – 100%
Determining the scope and contents of the prior art Ascertaining the differences between the prior art and
the claims in issue Resolving the level of ordinary skill in the pertinent art Evaluating evidence of secondary considerations
6
Highlights and Guidance
MPEP 2144.05 - Generally, differences in concentration or temperature will not support the patentability of subject matter encompassed by the prior art unless there is evidence indicating such concentration or temperature is critical
Routine Optimization
Jean Witz, tQAS, TC1600 571-272-0927
Basis of a Rejection Under 35 U.S.C. 103
The standard of patentability under 35 USC 103 was described by the Supreme Court in Graham v. John Deere, 383 U.S. 1, 148 USPQ 459 (1966):
7
Highlights and Guidance, cont’d
“[W]here the general conditions of a claim are disclosed in the prior art, it is not inventive to discover the optimum or workable ranges by routine experimentation.” Aller at 456.
The court held that it would have been expected that the reaction rate would have been slowed at a known rate when the temperature was reduced, and that the reaction rate would have been accelerated at a known rate by an increase in acid concentration
5
In re Aller, 220 F.2d 454, 105 USPQ 233 (CCPA 1955)
No evidence of a critical temperature range or acid concentration
“Any chemist reading the [prior art] could logically assume that higher yields might be obtainable, and by experimentally varying the conditions of temperature and acidity could find the most productive conditions”