泡沫液位传感器设计
传感器设计 泡沫液位传感器课程设计(借鉴分享)
泡沫液位传感器课程设计摘要:泡沫是一种特殊的两相流形态,其力学、热学、光学等多种性能均与单相气体或液体有很大区别,由于泡沫的形成机理多样、性质变化复杂,至今尚无完善的研究理论体系,泡沫的液位测量在国内外也是一个空白,本文主要设计了一种液位控制器,它以8051作为控制器,通过8051单片机和模数转换器等硬件系统和软件设计方法,实现具有液位检测报警和控制双重功能,并对液位值进行显示,一种基于传热原理的测量泡沫液位的传感器,介绍了传感器的构造和原理,以及测量误差和动态响应的计算分析。
关键词:泡沫;液位检测;传感器;两相流;Abstract:The foam is a special phase com pared w ith liqu id and gas.It ha s m any dif f erent cha r acters in m ech anics,therm oties,photology and soon,For different methods to generate fo amsand its special mechanism,even today there have not created a perfect theory system to deal with foam mediums.Foam level meas urement is also nearly to be all unreachable field by now.A kind of foam level sensor based on thermoties theory has be endeveloped,Introduces its structure 、principle 、analyses error and dynam icresponse of sensor.Key Words : Foam ;Level Detecting ;Sensor;8051Single chip microcomputer;目录摘要 (1)前言 (3)1课程概论 (4)1.1课程设计现状 (4)1.2泡沫详解 (5)1.3设计方案 (6)1.4方案设计流程图 (6)2 系统设计 (8)2.1 8051单片机 (9)2.2 液位传感器设计 (10)2.3 DAC0832 D/A 转换器 (12)2.3.1 D/A转换原理 (12)2.3.2 ADC0809转换芯片 (14)2.4显示部分与键盘 (15)2.5系统报警 (16)3课程设计总结 (17)参考文献 (18)前言随着国内传感器检测技术的发展,各种传感器被广泛的的应用于社会生活的方方面面。
青少年科技创新大赛创新发明作品《简易水位报警器》

简易水位报警器
【创意来源】
该作品设计思路来源:生活中给水壶加水时,有事暂时走开,因忘记而导致水溢出,等想起此事,水已经白白流了很长时间,造成了不必要的浪费,所以想设计一款提醒装置,提醒人们水壶中的水即将注满。
【设计原理】
水位传感器由水瓶、电池、蜂鸣器、塑料泡沫、铝板、铝片等组合而成。
加水时,利用泡沫漂浮的特点,当其上升到一定高度时,泡沫上的铝片触发电路开关,蜂鸣器发出警报声音。
【制作材料】
矿泉水瓶,9V电池、蜂鸣器,塑料泡沫、导线、
胶水,胶带、金属铝片、绝缘塑料片
【作品特点】
1、提醒:在水即将灌满容器时,装置会发出尖
锐的提示声。
2、携带方便:便捷小巧,占据空间小。
3、此作品可以拓展多种用途,如锅炉水位报警、潮水水位报警等作用。
【作品说明】
此作品主要是提醒作用,并不能及时停止灌水,适合小范围内使用。
气泡式液位遥测工作原理
气泡式液位遥测工作原理气泡式液位遥测,这名字听起来挺高大上的,实际上它就是通过气泡的方式来测量液体的高度。
想象一下,在一桶水里,你扔进去一个小管子,水通过这个管子,产生气泡,咕噜咕噜地冒出来。
这个过程就像是给水喝了一口气,结果水的高度就被精准地测量出来了。
是不是觉得有点神奇呢?这种方法就像是在液体里面跳舞的气泡,轻松自在,毫不费力。
咱们平常在生活中,也许没怎么注意液位的问题,但其实这可是个大事。
无论是工业上、还是咱家里的水箱,液位的高低可都得靠这技术来掌控。
想想看,要是水箱里的水不够了,洗衣机可就没法运行,搞得衣服一堆都洗不成。
这时候,气泡式液位遥测就显得特别重要了。
它就像个细心的小助手,随时监测水位,帮我们解决烦恼。
这种技术的原理其实蛮简单的。
我们在管道的一端打气,气泡就会在水中上升。
当气泡升到液面时,它会在液体的表面形成一个气泡,这个气泡的状态就会告诉我们水位的高低。
简单来说,气泡的存在就是液体高度的“信号”。
不过,听起来容易,实际上这其中还有不少门道。
比如说,气泡的大小、上升速度、甚至水的温度,都会对测量结果产生影响。
就像是做菜,火候掌握得好,味道才能刚刚好。
这个技术还得有好设备来配合,才能发挥出最佳效果。
气泡式液位测量仪通常都有一个精密的传感器,能及时把数据传回到显示器上。
想象一下,这就像是给你的水箱装了个智能监控,一旦水位变化,它马上告诉你。
真是科技带来的便捷,简直让人感叹,居然可以做到如此精准。
气泡式液位遥测不仅适用于水,其他液体也能测量。
无论是油、酸、碱,还是其他化学液体,这个方法都可以大展拳脚。
只要合理应用,它的精准度和可靠性都能得到保障。
尤其是在一些特殊行业,像石油化工、制药等领域,这种测量方法简直是不可或缺。
可以说,气泡的魔力在这些行业里,简直就是化身为守护神。
这种测量方法也相对环保,气泡的生成不会对液体造成污染。
相较于一些传统的测量方式,气泡式液位遥测可谓是“清清爽爽”。
设备的维护也比较简单,不用像其他设备那样繁琐,让人省心不少。
液位检测光纤传感器系统设计 - 副本

526
或 ± 2 × 10 - 6 . 因此从低功耗、高稳定度和低成本考 虑,采用单片机产生脉冲. 通过对单片机编程,仿真 时产生 1 kHz,50% 占空比的方波,在实际电路测试 中,频率为 998 Hz.
实际调试结果带宽为 219 Hz,中心频率为 1 013 Hz,光电探测器输出的为准周期信号,其各次谐波谱 分量位于通带之外,观测到的正弦波信号即为光脉 冲的基波分量对应的信号.
带通滤波器 的 输 出 为 正 弦 交 流 信 号,为 方 便 单 片机 A / D 采样,将交流信号按比例转换为直流电压 信号. 本系统采用 AD736 单片精密真有效值转换芯 片[8],将带通滤波输出的交流信号按有效值运算转 换为直流信号. 实际电路中电容采用钽电解电容,电 阻采用金属膜电阻.
图 4 稳光强系统 Fig. 4 System diagram of steady light
由脉冲发生 模 块 产 生 较 为 稳 定 的 脉 冲 信 号,通 过比较放大模块和激光管驱动电路驱动 LD,背向光 检测器( PD) 接收 LD 的光功率并将其转化为电信 号,此信号通过调理电路处理后送到比较放大模块, 与脉冲信号进行比较放大,并再次送入激光管驱动 电路,完成对 LD 光功率的稳定控制,使 LD 的光功 率在一个很小的范围内波动.
525
件,膜盒中央为光滑平面,近似反射平面,为提高反 射光强度,可以在膜盒中央粘贴一个小反射镜. 水压 变化时,双膜盒的 4 个膜片均发生形变,在一定的水 压范围内,膜盒中央的位移形变量与水压的变化量 成正比,通过光纤位移探头测量膜盒中央的位移形 变量实现对水压室水压的测量,从而得知水面高度 变化量. 1. 2 光纤位移探头输出特性分析
气泡式水位计设计方案

TPS5430电源应用方案一、芯片概述TPS5430有着宽输入电压,低静态功耗,转换效率高,实际应用十分广泛。
基本性能参数如下所示。
1.输入电压范围:5.5~36V2.输出电压可调节3.转换效率最高可达到95%。
4.输出持续电流达3A,峰值电流可达4A。
5.关断模式仅消耗18uA电流。
6.工作温度:-40~125℃二、电路设计电路设计参数要求(输入电压范围:10.8~19.8V;输出电压:5V;输入波纹电压:300mV;输出波纹电压:30mV;输出额定电流:3A)。
本人针对芯片资料进行电源电路部分设计,原理图如2-1所示。
芯片引脚ENA端为电源使能控制端,通过MCU来控制,在需要的时候开启电源,不需要时关闭电源,以降低系统功耗。
图三、电路板设计由于电源设计关系到整个系统命脉,在设计电路板布线和元件放置时,严格按照芯片资料要求进行。
在芯片正下方应放置焊盘连接到电源地(GND),并打好过孔。
如图3-1所示。
其元件选择也要求也比较严格。
①输入电容。
TPS5430输入需要一个稍大些的退耦电容。
这里推荐100uF和0.1uF(C60、C61)的贴片铝电解电容和高性能陶瓷电容。
也可以选择小一点的电容,但要满足输入电压和额定电流波纹要求。
②输出滤波器件。
输出滤波器件,即L8、C62。
TPS5430具有内部补偿电路。
输出电感与最大输出电流有关,这里选择15uH电感。
输出电容是影响额定电压、额定波纹电流和等价阻抗(ESR)的重要设计因素。
此应用中选择100uF输出电容,此时电路中产生的RMS波纹电流为143mA, 需要最大的ESR为40MΩ。
③输出电压设置。
输出电压由反馈控制脚FB脚的精密电阻(R55、R57、R56、R54)决定。
如果输出电压5.0V,参考电压1.221V,R1为10kΩ,则确定R2为3.24kΩ。
④ BOOT (启动)电容。
BOOT电容C62选择0.01uF。
⑤捕获二极管。
TPS5430需要外部捕获二极管,选择B340A,它的反向电压为40V,正向电流3A,正向电压0.5V。
气泡式水位计

气泡式水位计气泡式水位计测量精度高,免气瓶,免测井,免维护,抗振动,寿命长,特别适用于流动水体、大中小河流、水库或者水体污染严重和腐蚀性强的工业废水等场合。
气泡式水位计具有安装简单,操作、组网快捷,是遥测系统中的水位监测,尤其是无井水位测量最理想的水位监测仪器。
目录测量原理技术参数测量原理水位计将空气通过空气过滤器过滤、净化后,气泵将空气经单向阀压入储气罐中,储气罐中的气体分两路分别向压力掌控单元中的压力传感器和通入水下的通气管中输送,当气泵停止吹气时,单向阀闭合,水下通气管口被气体封住。
从而形成了一个密闭的连接压力传感器和水下通气管口的空腔。
依据压力传递原理可知,在通气管道内的气体实现动态平衡时,水下通气管口所经受的压力经过通气管传递到压力掌控单元的压力传感器上,所以,水下通气管口的压力和压力掌控单元的压力传感器所经受的压力相等,用此压力值减去大气压力值,即可得到水头的净压值,从而便可得出测量水位值。
技术参数量程:0m—65m可选小量程:0~2m;0~5m一般量程:0~10m;0~15m;0~20m大量程:0~30m;0~50m;0~65m供电电压:12DCV—14VDC;AC220V;110~240DC静态工作电流:≤1mA判别率:0.001m/20米0.001m/65米精准度:全量程±0.003%工作温度:—20℃~+65℃工作湿度:0—95%RH应用场合:静水或动水均可手记间隔:1min—24h可任意设置开关量输出:3组可编程开关量输出数据接口:RS485Modbus或SDI12协议RS232SDI—12标准接口USB/GPRS/GSM/卫星/TCP/IP模拟接口:4~20mA0~5V存储容量:50万条记录信息存储时间:≥10年气管长度:≤500米测管直径:3/8重量:≤2.5kg仪器体积:250mmX130mmX70mm外壳料子:铝合金或ABS工程塑料。
恒流式气泡液位传感器输出水深修正算法

恒流式气泡液位传感器输出水深修正算法恒流式气泡液位传感器作为一种近年来应用于测量水深的传感器,已经在高精度测量领域发挥了重要作用。
由于水的温度会影响气泡的大小,恒流式气泡液位传感器输出的数据会受到水温的影响,从而导致误差的发生。
因此,有必要开发一种修正算法,以减少和抑制由水温导致的误差,使恒流式气泡液位传感器能够在不同温度条件下发挥出其最大精度。
为此,本文开发了一种基于流量传感器的修正算法,该算法利用流量传感器监测水位高度和温度。
实验发现,该修正算法能够有效减少水温对气泡液位传感器的影响,从而提高其准确性。
在此基础上,本文还提出了一种改进的修正算法,采用改进的算法后,系统能够更好地适应水温变化,从而提高精度。
首先,本文给出了恒流式气泡液位传感器输出数据的公式,用于说明气泡液位传感器输出数据与水深和水温之间的关系。
其次,在该公式的基础上,本文提出了一种修正算法,该算法可以有效地减少水温对精度的影响。
基于流量传感器的实验结果,本文还提出了一种改进的修正算法,该算法结合了流量传感器检测的水位高度和温度,更好地适应水温变化,从而提高其准确性。
本文的研究结果表明,对于恒流式气泡液位传感器输出水深修正算法的研究具有重要意义,可以提高其准确度,从而更好地满足实际应用中对测量水深的准确性要求。
本文的工作为今后恒流式气泡液位传感器的实际应用提供了一
个新方向。
研究者可以进一步深入研究恒流式气泡液位传感器输出水深修正算法,以提高系统的精度和准确性。
同时,为了使系统更好地适应水温的变化,还需要提出更精确的修正算法,以进一步提高恒流式气泡液位传感器的精度。
泡沫液位传感器设计

摘要:泡沫是一种特殊的两相流形态,其力学、热学、光学等多种性能均与单相气体或液体有很大区别,由于泡沫的形成机理多样、性质变化复杂,至今尚无完善的研究理论体系,泡沫的液位测量在国内外也是一个空白开发了一种基于传热原理的测量泡沫液位的传感器,介绍了传感器的构造和原理,以及测量误差和动态响应的计算分析:1引言泡沫是气一液联合构造的特殊形态,也是一种具有重要研究价值的边界形态。
在自然界和工业生产过程中,普遍存在着大量的泡沫和泡沫性物质。
在有些领域它们对人类的生产和生活起着积极的推动作用,比如泡沫浮选、啤酒制造和消防;然而有时候泡沫的形成却起着相反的作用,比如造纸过程和放射性废水浓缩过程,能否有效地监测和控制泡沫,直接关系着产品质量和生产效率。
目前,生产和科研领域急需用于泡沫测量的仪表。
通过对泡沫的深入调研,开发r一种基于传热原理的测量泡沫液位的传感器ll J,介绍其构造和原理,并进行了测量误差和动态特性的计算分析。
2泡沫概述2.1泡沫的定义随着现代科学技术的发展,对于泡沫的研究越来越受到各行业的重视,然而“泡沫”至今仍无统一的定义,人们也经常将它与其他状态的物质相混淆。
英语中“泡沫”称为“foam”,常用的“bubble"是指“气泡”,而不是“泡沫”。
现在比较通用的一种泡沫界定方法如下(如图1):图 1 泡沫与气泡、气泡分散体示意图(1)气泡:浮于气体中的单个液膜包裹气体物,如娱乐中吹的肥皂泡;(2)泡沫:气多液少的“气/液”粗分散体,如污水处理产生的泡沫;(3)气泡分散体:液多气少的“气/液”粗分散体,如液体中的气泡。
2.2 泡沫的形成和稳定条件泡沫形成的基本要素为:气液接触,含助泡剂,并且发泡速度高于破泡速度。
液体表面形成的泡沫如果不能够保持稳定,不会对外界产生明显的影响,影响泡沫稳定的主要因素是Marangoni效应,又叫作“自我痊愈效应”;表面粘度;液膜表面电荷;以及熵性双层互斥作用。
泡沫罐液位计标识方法
泡沫罐液位计标识方法泡沫罐液位计是一种常见的液位测量仪表,广泛应用于工业生产中。
它通过测量泡沫的高度来判断液位的高低,从而实现液位的监测和控制。
本文将从泡沫罐液位计的原理、标识方法以及应用范围等方面进行介绍。
一、泡沫罐液位计的原理泡沫罐液位计是利用泡沫的高度来反映液位的高低。
在泡沫罐中,液体会产生泡沫,当液位上升时,泡沫的高度也会相应增加。
泡沫罐液位计通过测量泡沫的高度来确定液位的位置。
泡沫罐液位计主要由液位传感器、信号处理器和显示器组成。
液位传感器安装在泡沫罐内部,可以测量泡沫的高度。
信号处理器将传感器测得的数据进行处理,然后将结果传送给显示器进行显示。
二、泡沫罐液位计的标识方法泡沫罐液位计的标识方法通常包括液位刻度线和液位报警线两种方式。
1.液位刻度线液位刻度线是指在泡沫罐上刻画出不同液位的刻度线,用于指示液位的高低。
通常,液位刻度线会根据液位计的测量范围进行划分,每个刻度线代表一个特定的液位高度。
在使用过程中,只需要观察液位是否达到刻度线即可知道液位的高低情况。
2.液位报警线液位报警线是指在泡沫罐上划定一个特定的液位高度,当液位超过该高度时,液位计会发出警报信号。
液位报警线的设置可以帮助工作人员及时采取措施,防止液位过高导致溢出或其他安全问题的发生。
三、泡沫罐液位计的应用范围泡沫罐液位计广泛应用于各个行业的液位监测和控制中。
以下是一些常见的应用场景:1.化工行业:在化工生产过程中,液位的控制对于保证生产安全和质量非常重要。
泡沫罐液位计可以实时监测液位的高低,避免液位过高或过低引发的安全事故。
2.石油行业:在石油储存和运输中,液位的监测和控制是必不可少的。
泡沫罐液位计可以帮助工作人员了解石油储罐中的液位情况,及时做出相应的调整和处理。
3.食品行业:在食品生产过程中,液位的控制对于保证产品质量和卫生安全非常重要。
泡沫罐液位计可以帮助工作人员监测液位的变化,及时采取措施,避免液位过高或过低对食品生产造成影响。
传感器液位检测项目设计方案
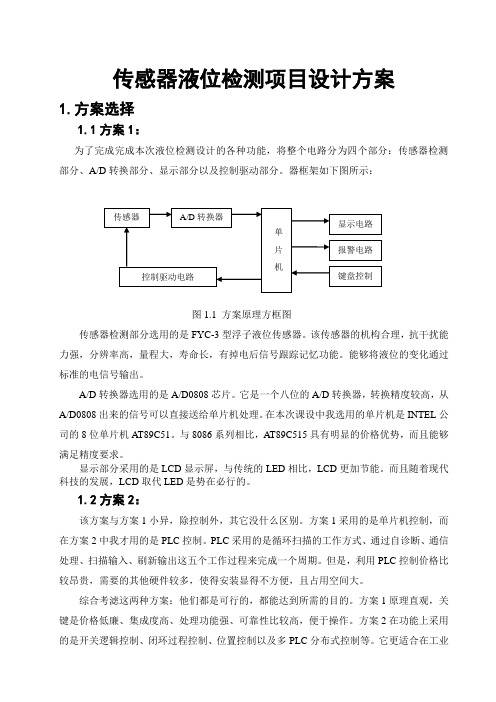
3)工作时序与使用说明
ADC0808的工作时序如图2.6所示。当通道选择地址有效时,ALE信号一出现,地址便马上被锁存,这时转换启动信号紧随ALE之后(或与ALE同时)出现。START的上升沿将逐次逼近寄存器SAR复位,在该上升沿之后的2μs加8个时钟周期(不定),EOC信号将变低电平,以指示转换操作正在进行中,直到转换完成后EOC再变高电平。微处理器收到变为高电平的EOC信号后,便立即送出OE信号,打开三态门,读取转换结果。
2.3A/D转换部分的设计
现在市面上ADC芯片的品种、型号很多,其部功能强弱、转换速度快慢、转换精度高低有很大差别,但用户最关心的外特性包括以下四种基本信号引脚端:模拟信号输入端(单极性或双极性);数字量输出端(并行或串行);转换启动信号输入端;转换结束信号输出端。除此之外,各种不同型号的芯片可能还会有一些其他各不相同的控制信号端。选用ADC芯片时,除了必须考虑各种技术要求外,通常还需了解芯片以下两方面的特性:数字输出的方式是否有可控三态输出;启动转换的控制方式是脉冲控制式还是电平控制式。
图2.8 AT89C51单片机引脚图
如上图2.7所示为AT89C51单片机的引脚图,AT89C51单片机由微处理器、片存取器RAM/ROM、P0-P3组成的I/O端口、各种存取器组成的特殊功能寄存器SFR、串行接口、定时/计数器、中断系统、振荡器等所组成。下面分别介绍各部分的基本情况。
恒流式气泡液位传感器输出水深修正算法

恒流式气泡液位传感器输出水深修正算法恒流式气泡式水位传感器是一种新型的液位测量工具,它能够检测水位变化,并且最大限度地减少噪声干扰。
这种传感器的使用不需要液位的控制,而是采用气泡液位传感器的技术,从而实现精确的水深检测。
而,该传感器在实际检测过程中还存在误差。
这是因为在检测水位时,由于自然物理过程会产生波动,所以计算出来的水深可能与实际测量值有较大差异。
为了解决这个问题,研究者提出了一种改进的《恒流式气泡液位传感器输出水深修正算法》(水深算法)来进行误差修正。
水深算法基于流动神经网络(FNN)算法,通过分析实时水位信号的变化,排除浮动的影响,获得准确的水深测量值。
该算法采用两个模型,一个是抗认知噪声(NC)模型,另一个是调整误差(EC)模型。
NC模型用于消除噪声,而EC模型用于修正计算出来的水深误差。
为了保证最终结果的准确性,该算法还采用了灰色预测模型,以便从算法的输出结果中抑制误差,从而获得较高的准确率。
该算法由以下几个步骤组成:首先,从气泡式水位传感器中采集实时水位信号,对其进行相关性分析,以获取实时水位曲线信号;其次,根据算法定义的规则,结合NC模型及EC模型计算水深;最后,将计算出来的水深值用灰色预测模型进行修正,以实现准确的水深检测。
为了检验该算法的可行性,研究者测试了几个不同的水位变化情况,取得了良好的结果。
在模拟实验中,该算法的水深检测精度可达到99.8%,说明它在准确性上确实具有优势。
《恒流式气泡液位传感器输出水深修正算法》作为一种改进的液位测量方法,可以有效地抑制水位测量过程中的误差,具备实际应用的价值。
而且,它较传统的液位测量方法准确性更高,可以有效降低误差,从而提高水深测量的精度。
在未来,该方法可以更加广泛地应用于实际的水深测量等场景,以提供准确的测量结果。
综上所述,《恒流式气泡液位传感器输出水深修正算法》可以有效地抑制水位测量过程中的误差,从而获得较高的准确率。
该算法可以有效地应用于实时水位测量,为实际实现准确的水深检测提供参考。
消防泡沫罐液位要求

消防泡沫罐液位要求消防泡沫罐液位是指泡沫罐内泡沫液体的高度,它是消防系统中重要的参数之一。
正确的泡沫液位可以保证消防泡沫系统的正常运行,提供有效的灭火性能。
泡沫液位的要求主要包括以下几个方面:1. 泡沫罐液位应符合设计要求。
在设计消防泡沫系统时,根据建筑物的特点、火灾风险等因素确定了泡沫罐的容量和泡沫液位要求。
在实际使用中,应根据设计要求进行定期检查和调整,确保泡沫液位符合要求,以保证系统的灭火效果。
2. 泡沫液位的监测与报警。
为了及时了解泡沫罐内泡沫液位的变化情况,可以安装液位监测器和报警系统。
液位监测器可以实时监测液位的变化,并通过报警系统发出声光信号,提醒操作人员及时采取措施。
这样可以避免泡沫罐液位过低或过高而影响灭火效果,确保系统的正常工作。
3. 泡沫液位的调整与补充。
在实际使用中,由于泡沫液体的消耗和泡沫系统的运行,泡沫液位会发生变化。
因此,需要定期检查泡沫液位,并根据情况进行调整和补充。
一般情况下,泡沫液位应保持在设计要求的范围内,以确保系统的灭火效果。
4. 泡沫液位的保护与维护。
为了保护泡沫液位的准确性和系统的正常工作,需要采取一些措施进行保护和维护。
首先,泡沫罐应安装在干燥、通风良好的地方,避免泡沫液体受潮和污染。
其次,需要定期清洗和检查泡沫罐、管道和阀门等设备,确保其畅通无阻。
同时,还需要定期检测和校准液位监测器,确保其准确可靠。
5. 泡沫液位的记录与分析。
为了了解泡沫液位的变化规律和系统的工作情况,可以进行泡沫液位的记录和分析。
记录泡沫液位的变化情况,并与系统的运行状态和事件记录进行对比分析,可以及时发现问题和隐患,并采取相应的措施进行修复和改进。
消防泡沫罐液位要求是保证消防泡沫系统正常运行的重要参数之一。
正确的泡沫液位可以提供有效的灭火性能,保护人员和财产的安全。
因此,在实际使用中,应严格按照设计要求进行监测、调整和保护,确保泡沫液位符合要求,以保证系统的灭火效果。
气泡式水位传感器工作原理
气泡式水位传感器工作原理
首先,介绍一下气泡管。
气泡管主要由一根透明的管道和一个分隔气
室组成。
透明的管道一端开放于液面上方,另一端固定在液面下方。
气室
位于液面以下,与管道相连。
当液位上升时,气室内的气体会被挤压到管
道中形成气泡,并且气泡的位置随液位的改变而移动。
然后,介绍一下压力传感器。
压力传感器的作用是测量气泡管中气泡
的压力。
这个压力与气泡管中的液体高度有关。
压力传感器通过测量气泡
管中气泡压力的变化来确定液位的高低。
具体的工作原理如下:
1.在初始状态下,液位低于气泡管底部,气室内的气体通过管道通道
进入液位上方的气室。
由于液体的静压作用,气泡管中的气体会被挤压到
管道中形成气泡。
此时,气泡的位置表示液位的最低点。
2.当液位上升时,气室内的气体被挤压到管道中的气泡继续向上移动。
此时,压力传感器会感知到气泡管中气泡压力的变化,并转换成电信号。
3.通过比较不同液位对应的气泡压力,可以确定液位的高低。
需要注意的是,气泡式水位传感器测量液位的精度受到气泡位置的影响。
为了提高精度,可以采用多个气泡管,并采用平均值或其他方法来获
取更准确的液位数据。
总结起来,气泡式水位传感器的工作原理是基于气泡管中气泡位置的
变化来测量液位的高低。
它利用液体的静压原理和压力传感器来实现,具
有简单、可靠的特点,并在液位测量中得到广泛应用。
气泡水位计设计

气泡水位计设计
气泡水位计是一种常用的水位测量装置,主要用于工业生产中的液位控制。
它通过测量液体中的气泡数量和位置来判断液位的高低,具有简单、可靠的特点。
气泡水位计的设计原理基于气体的浮力和液体的压力。
在液体中,当气泡上升到液体表面时,液体的压力将气泡推出液体并进入气体空间。
通过检测气体空间中的气泡数量和位置,我们可以得知液位的高度。
气泡水位计的主要组成部分包括测量管、气泡发生器和气泡检测装置。
测量管是一个垂直安装的透明管道,一端与液体相连,另一端与气体空间相连。
当气泡从液体中产生并上升到液体表面时,它们进入测量管。
气泡发生器通过注入气体或产生气体泡沫的方式,产生气泡并将其送入液体中。
气泡检测装置则用于检测气泡在测量管中的数量和位置。
在设计气泡水位计时,我们需要考虑几个关键因素。
首先是测量精度。
为了获得准确的液位测量结果,我们需要确保气泡的产生和检测过程都具有高精度。
其次是可靠性和稳定性。
气泡水位计通常用于工业生产中的液位控制,因此它的稳定性和可靠性是非常重要的。
此外,设计还应考虑到易于安装和维护。
在实际应用中,气泡水位计有许多不同的型号和规格可供选择。
根据不同的工作环境和需求,我们可以选择适合的气泡水位计来实现液位的准确测量和控制。
总之,气泡水位计是一种简单、可靠的液位测量装置。
它的设计原理基于浮力和压力,通过测量气泡的数量和位置来判断液位的高低。
在实际应用中,我们需要考虑测量精度、可靠性和稳定性等因素,以选择适合的气泡水位计来满足需求。
液位传感器设计

毕业设计任务书
任务书填写要求
1.毕业论文任务书由指导教师根据各课题的具体情况填写,经学生所在系的负责人审查、签字后生效。
此任务书应在毕业论文开始前一周内填好并发给学生;
2.任务书内容必须用黑墨水笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,不得随便涂改或潦草书写,禁止打印在其它纸上后剪贴;
3.任务书内填写的内容,必须和学生毕业论文完成的情况相一致,若有变更,应当经过所在专业及系主管领导审批后方可重新填写;
4.任务书内有关“学院、系”、“专业”等名称的填写,应写中文全称,不能写数字代码。
学生的“学号”要写全号(如020*******),不能只写最后2位或1位数字;
5.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2004年3月15日”或“2004-03-15”。
毕业设计任务书
毕业设计任务书。
气泡式水位计设计方案

基于TPS54360的电动车控制器电源电路设计
众所周知,电源电路是系统设计的一个重要组成部分,其设计好坏对整个系统能否正常运行具有决定性作用,此处设计的电动车控制器电源电路需要的电压有+48V、+15V、+5V、+3.3V等几种。
其中+48V电压来源于外部电动车蓄电池,用于提供整个电动车控制器控制系统的工作电压,+15V电压用于为MOSFET功率管驱动电路中的IR2130驱动芯片提供工作电压,+5V电压用于为光耦隔离电路及电流检测部分电路提供工作电压,+3.3V则用于为STM32微控制器及霍尔位置检测电路提供工作电压。
+5V电压和+3.3V电压比较容易得到,而由+48V 电压直接得到+15V电压则比较困难,普通的电压转换芯片已不能满足要求,因此如何将外部蓄电池提供的+48V电压有效转化为+15V电压是电源电路的关键部分。
此处设计采用的是美国德州仪器公司生产的一款高效率电源转换芯片TPS54360,它是一款额定输入电压可达60V,额定输出电流可达3.5A的降压稳压器,此稳压器具有一个集成的高侧MOSFET功率管,具有100KHz至2.5MHz 的开关频率,可以承受的最大电压高达65V。
同时由于该稳压器采用了电流模式控制,使得电路无负载时的电源电流减小至146uA,关断电源电流被减少至2uA,不仅保证了电源的稳定性,同时也大大提高了电源转换效率。
经TPS54360转换得到的+15V电压经降压芯片LM2576-5.0V稳压得到+5V电压,+5V电压再经AMS1117-3.3V稳压得到+3.3V电压。
整个电动车控制器系统的电源电路如图所示。
经实际硬件测试可知此处设计的基于TPS54360的电动车控制器电源电路可以为系统提供稳定、可靠的工作电压。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:泡沫是一种特殊的两相流形态,其力学、热学、光学等多种性能均与单相气体或液体有很大区别,由于泡沫的形成机理多样、性质变化复杂,至今尚无完善的研究理论体系,泡沫的液位测量在国内外也是一个空白开发了一种基于传热原理的测量泡沫液位的传感器,介绍了传感器的构造和原理,以及测量误差和动态响应的计算分析:1引言泡沫是气一液联合构造的特殊形态,也是一种具有重要研究价值的边界形态。
在自然界和工业生产过程中,普遍存在着大量的泡沫和泡沫性物质。
在有些领域它们对人类的生产和生活起着积极的推动作用,比如泡沫浮选、啤酒制造和消防;然而有时候泡沫的形成却起着相反的作用,比如造纸过程和放射性废水浓缩过程,能否有效地监测和控制泡沫,直接关系着产品质量和生产效率。
目前,生产和科研领域急需用于泡沫测量的仪表。
通过对泡沫的深入调研,开发r一种基于传热原理的测量泡沫液位的传感器ll J,介绍其构造和原理,并进行了测量误差和动态特性的计算分析。
2泡沫概述2.1泡沫的定义随着现代科学技术的发展,对于泡沫的研究越来越受到各行业的重视,然而“泡沫”至今仍无统一的定义,人们也经常将它与其他状态的物质相混淆。
英语中“泡沫”称为“foam”,常用的“bubble"是指“气泡”,而不是“泡沫”。
现在比较通用的一种泡沫界定方法如下(如图1):图 1 泡沫与气泡、气泡分散体示意图(1)气泡:浮于气体中的单个液膜包裹气体物,如娱乐中吹的肥皂泡;(2)泡沫:气多液少的“气/液”粗分散体,如污水处理产生的泡沫;(3)气泡分散体:液多气少的“气/液”粗分散体,如液体中的气泡。
2.2 泡沫的形成和稳定条件泡沫形成的基本要素为:气液接触,含助泡剂,并且发泡速度高于破泡速度。
液体表面形成的泡沫如果不能够保持稳定,不会对外界产生明显的影响,影响泡沫稳定的主要因素是Marangoni效应,又叫作“自我痊愈效应”;表面粘度;液膜表面电荷;以及熵性双层互斥作用。
2.2泡沫的研究目前泡沫的研究主要在两个方面:一是对于泡沫稳定性的研究,其重点在于增加泡沫流体的稳定性和消泡;二是对液体中气泡的动力学性质研究,主要研究方向有:在界面上气泡的生成理论、生长速率、动力学、脱离理论和数值模拟以及气泡传热传质的研究。
泡沫的研究手段主要有:(1)声学技术:主要包括声学共振、脉冲探测,声纳复合频率反射方法,声学方法在海洋泡沫研究中使用较多;(2)气泡陷阱:用激光束在液体内生成势阱,在力的不平衡作用下,气泡停留在势阱里;(3)照相方法:以调整摄影记录气泡的轨迹;(4)电导方法:用探针测量电导率的变化,记录气泡。
2.4 泡沫的测量方法(1)射线法:基于核辐射通过物质时被减弱的原理测量泡沫。
(2)辐照陷肼法:将特殊的固体弹性高聚物放置在液体中,过热的小液滴附着分布在上面,处于准稳态,容易被激发。
当中子打击探测器表面液滴的原子时,产生的重离子反弹,形成热点,液体蒸发汽化,形成特殊的势能陷阱,周围的气泡被吸引在势肼中。
用光纤观察表面气泡数量,可以确定气泡的特征。
(3)电导法:以电导探针测量电导率的变化,反映探针端部处于气泡的中央还是液体中。
(4)导电法:把电极一极装在液体中,另一极在液体上方,当泡沫出现时,使电极导电,反映泡沫高度。
3 传感器的设计3.1 传感器的原理当流体流过一个功率恒定的发热体表面时,对流和导热的联合作用构成对流换热,发热体表面温度决定于表面与流体介质问的换热情况。
当换热达到动态热平衡时,发热体的释热功率等于对流换热的换热功率,用对流换热的牛顿冷却公式可表示为q:aAt (1)Q:FaAt (2)当发热体的表面积 F一定时,流体与发热体的温差△f与对流换热系数Ct的关系可以表示为(3)对流换热系数 a受流体自身性质的影响,固定释热功率和发热体表面积,温差△£就反映了对流换热系数的变化。
热体与同温同压水和水蒸气的对流换热系数存在较大差别,如:对于运行压力为2.5 MPa,温度为210 oC的反应堆,冷却剂使用去离子水,发热体释热功率 1.21 W,计算结果是:水中的换热系数口水=2 O4O W/(m2·oC),以同一条件下,干饱和水蒸气的换热系数口泞=80.1 w/( ·℃),两者之比为△ 汽:Atj ~:口水:口汽=2 040:80.1:25.47 (4)从上述数据中可以看到,在反应堆冷却剂中,释热式液位传感器可以明显地区分液体介质和蒸汽介质。
在被测环境中沿竖直方向不同高度设置传感器组,就可以对液位进行不连续测量。
在反应堆的堆芯冷却剂液位测量中,前苏联、美国、日本和中国等国家的科学研究应用了基于传热原理的液位传感器,得到了比较满意的结果 f J。
泡沫流体具有特殊的物性,有可能利用相近的方法,对泡沫介质进行监测。
这种方法的优点是:把液位测量转换为温度测量,而温度测量是最成熟的测量技术之一,因此提高了可靠性和可实现性。
3.2 传感器结构传感器主要由两部分组成,一部分是测温元件,另一部分是发热元件,结构如图2。
发热元件采用螺旋状电阻丝,值( 1 2 ± l %。
) Q测温元件采用了通用的K型铠装热电偶 (材料为NiCr—NiSi),热电势较大,灵敏度高,且输出信号的线性好;铠装的绝缘材料为M ,热导率低。
测量泡沫液位的传感器采用2支相同结构的传感器元件 1%)Q,组成复合组件,如图3所示,其中1支作为加热一测量元件,另1支用来测量环境温度,这样可避免由于热电偶动态特性不同造成的温差扰动。
同时,它们互为冗余,当其中1个传感器内的加热元件烧毁时,可以用另 1支替换。
经计算分析,测量组件中两个传感器的测量端水平距离定为 15 mm,这样可以保证传感器所在位置的环境温度基本一致,同时尽量减小测量传感器发热元件对环境温度测量造成的误差3.3 传感器误差分析传感器的误差为温度输出信号的误差,主要由下述各项构成:测温热电偶分度误差】: 1 = 0 . 1 ℃;热电偶测温误差:对于 K型热电偶,测量范围 0 1 2 0℃,8 2 = 1 2 0×1 % = 1 . 2 o C;补偿导线的误差文:乱 = 0 . 5 o C;加热恒流源固有误差:恒流源精度 1 . 5 %,根据式( 3 ) ,=2 0 0 4 1 0 4 0 1 0 -0_3 ℃×丌×( × 一) ×( × )发热元件电阻误差:发热元件电阻指标为R=( 1 2 ±1 %) Q ,传感器一致性误差 6 :对使用的 6 支泡沫传感器标定,计算一致性误差 6 = 0.3o C.由于所有的误差都是随机误差,求算系统的最可几误差:= = 0. 1 2+1.2 2+0. 5 +0. 3 +0. 1 +0. 3 =1 . 3 7 5 o C ( 5 )3 .4 传感器动态特性计算动态特性是传感器重要的性能指标,只有传感器的动态测量变化率大于被测对象的参数变化率的前提下,才能保证测量的实时性和可靠性。
首先分析传感器从水到水蒸气介质变化的动态问题,求解非稳态传热过程变化规律。
假定 0 时刻前传感器处于水中,传热到达稳态; 0 时刻突然进入水蒸气介质中,介质温度不发生改变。
在单位时问长度 A r 内,传感器从发热元件吸收的热量为Q 吸=q · A r ( 6 )释放的外界环境的热量Q放:a F ( t 一t ) △ r ( 7 )单位时间传感器蓄热热量Q蓄:Q 吸一Q 放=q A r—a F ( t 一t ) A r ( 8 )一般来说,传感器测量端表面与介质之间的对流换热系数 a 是换热平均温度 t :( t +t ) / 2 的单值连续函数。
在 t 连续变化时,为了简化,视 c t 为常数,由此推导动态特性。
传感器因为蓄热而温度变化Q 蓄= c 。
m。
A t ( 9 )以上传热过程遵守能量守恒定律由式,( 8 )和式 ( 9 ) 得c。
m。
At=q。
A r 一口’ ( t 一t ) Ar ( 1 0 )d ( 1 1 )将式 ( 1 1 ) 两端对 r积分,积分起始时间 0,对应传感器表面温度 t o ,积分结束时间 r ,对应传感器表面温度 t,得=J 未”k :£ + q一( +f 一f 。
) e 一 ( 1 2 )此式表示了介质由水变化为水蒸气时传感器表面温度与时间的关系。
忽略温度变化对于传感器材料导热系数的影响,热电偶测点温度与传感器表面温度的温差为定值,测试测点处的动态响应同式 ( 1 2 ) ,得£= £ +a旦F一( +£一f 0 ) e 一 ( 1 3 )传感器时间响应常数f: ( 1 4 )然后,计算传感器从水蒸气到水介质变化的动态特性。
假定0时刻前传感器处于水蒸气中,温度t=1 0 0 oC ;0时刻后介质为水,温度同水蒸气。
在 0 时刻传感器的温度初值 t 。
,忽略传感器结构热阻,得到简化的非稳态导热微分方程式如下:=c + + v - J +所以,由式 ( 2 )Q=aF。
(t—t ) (16)此处 Q总是正值,而传感器冷却换热量输出,为负值,有£= £ +a旦F一( +£一f 0 ) e 一 ( 1 3 )传感器时间响应常数f: ( 1 4然后,计算传感器从水蒸气到水介质变化的动态特性。
假定0时刻前传感器处于水蒸气中,温度 t=100o C ;0时刻后介质为水,温度同水蒸气。
在0时刻传感器的温度初值 t 。
忽略传感器结构热阻,得到简化的非稳态导热微分方程式如下:。