深井打捞机说明书_嵌入式部分
油气田井下打捞工具详解

油气田井下打捞工具详解油气田井下打捞工具是在油气田井下作业中常用的工具,用于提取沉积在井底的固体颗粒、井眼附近的残渣和其他杂质。
这些工具的设计和制造旨在提高生产效率和确保井下作业的安全性。
一种常见的油气田井下打捞工具是钻井井底清洗器。
它通常由管状的外壳和密封装置组成,可以固定在钻杆或管柱的下部。
这个工具通过旋转来清除井底的杂质,同时还可以通过喷射清洗剂和液体来冲刷井眼。
钻井井底清洗器的设计使得固体颗粒可以被收集起来,以防止它们被带到地面。
另一种常用的工具是井底刮器。
它通常由一些可移动的刮板组成,可以固定在钻杆底部的管柱内。
井底刮器的作用是刮除井底的附着物,例如泥浆、水合物或其他固体颗粒。
刮板的设计和排列方式可以根据具体的井下条件来调整,以提高清除效果。
除了钻井井底清洗器和井底刮器,还有一些其他类型的油气田井下打捞工具可供选择。
例如,磁铁式工具可以用于吸附带有磁性杂质的固体颗粒。
超声波清洗工具可以利用超声波波动来击碎并清除井底堆积的残留物。
在使用油气田井下打捞工具时,操作人员要遵循严格的操作规程和安全要求。
他们需要确保工具的正确安装和使用,以免发生事故或造成环境污染。
此外,定期的维护和检查也是确保这些工具正常工作的关键。
有时,可能需要结合不同的工具和技术来达到最佳的清除效果。
总结起来,油气田井下打捞工具在油气开采作业中起着重要作用。
它们通过有效地清除井底的杂质和残留物,提高生产效率和保障井下作业的安全性。
然而,对于使用这些工具的操作人员而言,遵循规程和安全要求是至关重要的,以确保工作的顺利进行。
常用打捞工具操作使用方法教材

常用打捞工具操作使用方法一、公锥公锥是钻具、油管的水眼打捞工具(内部打捞工具),公锥是一次性打捞工具,因为在造扣和卸开时可能会受损伤。
特点:造扣面积小,容易造进扣;直径小,易断裂;水眼小,不能进行爆炸松扣、浴井等作业。
公锥的规格是根据钻具水眼的尺寸设计和制造的,常用的规格有:27/8゛、31/2゛、41/2゛、5゛、51/2゛、65/8゛等。
公锥的锥度通常是1:16,也有1:20、1:24,、1:32的。
锥度小,造进的扣数多;在落鱼比较轻的情况下,可以加工成1:12的锥度。
操作使用方法:1、钻具组合:公锥+安全接头+钻杆。
31/2゛以下的钻杆要接钻铤。
2、测量、会草图。
3、计算鱼顶方入和造扣方入。
4、冲洗鱼顶,探鱼顶,根据泵压判断公锥是否插进水眼。
5、停泵造扣,开始加压10KN左右,转1~2圈引扣,再逐渐增加造扣扭矩及钻压。
41/2゛以上的公锥一般加压30~40KN,有效造进6~8扣以后才上提钻具。
在公锥小、井眼大、无钻铤的情况下,要控制造扣钻压。
6、捞住落鱼以后,试开泵,观察水眼是否畅通。
上提3~5m猛刹2~3次,证实捞稳方可起钻。
注意事项1、下车、搬运和上扣时防止碰撞,用液气打钳紧扣,控制扭矩,不宜过紧。
2、造扣时加压不得过多,在大井眼和大斜度井内加压后,要控制扭矩,防止公锥折断。
3、可以短期循环,起钻控制速度,不允许转动转盘。
4、起出井口时防止挂断,不允许在井口卸公锥。
二、大头公锥大头公锥是钻具的丝扣打捞工具(内部打捞工具),在打捞丝扣完好的情况下可以再次使用。
其型号与钻具的扣型相同,锥度与同扣型的接头锥度一样(内平扣1:6,贯眼扣1:4)。
特点:强度高,不会折断,与丝扣接触的锥面同时造扣,牢靠(造扣很紧),不易滑扣,可接震击器;水眼比较大,便于测卡、爆炸松扣。
要损坏钻具丝扣。
操作使用方法:1、钻具组合:大头公锥+安全接头+钻杆。
31/2゛以下的钻杆要接钻铤。
根据井下情况需要可接震击器。
2、测量、会草图,检查打捞丝扣硬度。
Bowen 大范围打捞筒说明书
技术标准• 抓捞范围更大——抓捞范围最大可比其它打捞筒大四倍• 减少卡瓦库存——减少库存空间并且降低可能的风险• 打捞效率高——减少起下钻次数和非生产时间• 通用性强——下部接头可与引鞋,磨鞋以及其它打捞配件更换• 可选择的密封——有高压和标准压力的密封可供选择• 上接头与延长筒的内径增大——允许更大尺寸的落鱼• 18”打捞颈——允许螺纹磨损后的重新加工• 固定螺丝——避免倒扣优点61097172927211261一个标准的11 ¼ in 的150系列打捞筒最多可能需要60个打捞篮,节省了您的潜在开支并为钻井场地节省了储存空间。
我们的Bowen ™ 大范围打捞筒打捞尺寸范围更大,最大可比其它打捞工具大四倍,减少钻井起钻次数。
工具采用坚固的设计、优化的特性和结构,是您打捞成功的现代化解决方案。
大范围打捞筒是现有的最强的打捞工具,可以与严重磨损的落鱼啮合、密封并将之提起。
在打捞作业中,它承受了巨大的拉力,扭转和震击力,而不会损害工具或是落鱼。
它提高了安全锁定未知尺寸落鱼或者小尺寸落鱼的能力。
除了提供更大范围的打捞尺寸,这个工具能在高压或标准压力下给非常大的挤出间隙提供密封,并保证钻井液完全从落鱼内部流通。
顶部接头与筒体的新型粗纹扣,保证更大的拉伸强度和抗扭强度,同时也提高了装配速度。
对扣型的优化也使得顶部接头和延长筒的内径得以扩大,使得工具可以通过最大尺寸的落鱼。
减少卡瓦库存创新技术大尺寸打捞筒可以减少您至少75%的卡瓦库存。
大范围打捞筒已经有很多成功的案例。
在很多的标准打捞筒尝试失败的打捞作业中,大范围打捞筒仅用一次钻就成功打捞。
扩大的打捞尺寸使得打捞筒可以大幅度减少非生产时间和成本。
如果需要更多有关Bowen 大范围打捞筒的相关信息,请参阅 /bowen .经过验证的打捞解决方案贯穿于每一环节的可靠性全球业务分布/ downholelocations。
打捞工具使用方法

公锥一、操作步骤:1、根据井下落鱼内径选择合适的公锥。
画草图,标尺寸。
2、组合钻具下钻。
(公锥+安全接头+钻杆)。
3、下钻距鱼顶0.5米开泵,冲洗鱼顶10~20分钟。
然后改为小排量,在方钻杆上画出鱼顶方入和造扣方入。
缓慢下放钻具探鱼头,若进入水眼内则泵压升高、悬重下降;若插在水眼外侧,则泵压不变、方入不对、悬重不变(也有可能下降)。
应转动钻具,以不同方向探鱼头或起钻下弯钻杆探鱼头。
4、公锥进入落鱼水眼后,停泵。
在转盘面上作记号,以记录造扣圈数。
用I 档造扣,开始加压10~20KN引扣,观察悬重表悬重慢慢回升(说明已进扣),再加压30~50KN造扣,注意控制造扣速度和倒车。
5、造扣完后,上下活动钻具2~3次,再造扣一次,确认已造牢。
在允许拉力范围内大力上提,若解卡,可起钻;若未解卡,可试开通泵注入解卡剂解卡;若无效,则从安全接头处到开。
6、倒扣(左旋公锥+安全接头+钻杆)。
1)、下钻距鱼顶0.5米开泵,冲洗鱼顶,锁死大方瓦和方补心,改倒车造扣。
2)、造扣完后,改正车,使悬重稍大于捞柱悬重。
改倒车,挂合转盘离合器倒扣;倒开后,改正车,探明方入,试开通泵起钻。
3)、若螺纹连接紧,转盘离合器打滑,可停总车,用转盘事故销销死转盘,控制总车倒扣。
二、技术要求:1、安全接头:1)、左旋螺纹安全接头不能作随钻工具,至能在倒扣打捞时使不得使用尖锐物挑出或钩出;装“O”形圈时,应用手在槽内转动几圈,胶圈不打扭。
4)、螺纹连接较紧时,可用大锤垫木块敲击。
2、公锥:1)、公锥外螺纹必须完好,造扣螺纹距螺纹锥尖端10㎝以上。
2)、打捞方入计算准确,下探鱼头不超过鱼头1m,防挤扁鱼头。
3)、捞获后,起钻操作平稳,严禁转盘卸扣。
4)、造扣时应将小方补心栓保险绳,人员离开井口。
5)、若探不到鱼头,不可随便下过鱼头,应接弯钻杆以不同方向探鱼头,必要时进行电测。
卡点计算公式: L=9.8KΔL/ΔFL=卡点井深m K=计算系数ΔL=平均钻具伸长㎝ΔF=平均拉力增加值KN初始循环立管总压力=关井立压+Pci值+附加安全压力Pci值=(压井排量÷正常钻进排量)×钻进时泵压终了循环立管总压力=(Pci×压井液密度)÷原浆密度泥浆泵排量计算公式:Q=(πR2×冲程×3×100×上水率×1000)÷60长度单位为米一、作用:它连接在地面的钻柱上,是解除井内钻柱卡钻事故的有校工具;能在弯曲井或定向井中下击解卡,尤其解除“键槽”卡钻的效果更好。
打捞工具使用说明

• (5)使用下击器且钻具重力不够时,应根据钻 具重力、井斜和井内液体情况,确定好钻具上提 高度和下放速度,以达到冲击胀大变形套管的目 的。 • (6)经过以上操作仍不能通过时,表明胀管器 尺寸过大,应起钻更换较小一级的胀管器。 • (7)第一级胀管器通过后,第二级胀管器的外 径只能比第一级大 1.5~2m左右,以后逐步增 量进行挤胀。 • (8)当选用的胀管器外径尺寸超过套管变形部 位内通径 2mm以上时,切忌高速下放冲胀,防止 将胀管器卡死。
5、操作方法 (1)下井前检查钻杆丝扣是否完好,水 眼是否畅通,YD合金或耐磨材料不得超 过本体直径。 (2)将平底磨鞋连接在工具最下端下井。 (3)下至鱼顶以上2~3m,开泵冲洗鱼 顶。待井口返出洗井液流平稳之后,启动 转盘慢慢下放钻具,使其接触落鱼进行磨 削。
• 6、注意事项 (1)下钻速度不宜太快。 (2)作业中不得停泵。 (3)如果出现单点长期无进尺,应分析原 因,采取措施,防止磨坏套管。 (4)对活动鱼顶不宜使用,以防止磨鞋带 动落鱼向井底钻进,或损坏下面落鱼。
• 5、原理:是一个以壳体引鞋和芯铁为两个 同心环形磁极,两极磁通路之间为无铁磁 材料区域,使芯铁、引鞋最下端有很高的 磁场强度。由于磁通路是同心的,因此磁 力线呈辐射状,并集中于靠近打捞器下端 的中心处,可把小块铁磁性落物磁化吸附 在磁极中心。还可以吸附一些与其相接触 的小型落物,实现打捞。
• 6、操作及注意事项 • (1)根据井径和井况选择合适的强磁打捞器 和拨鞋,检查接头、打捞筒、拨鞋联接是否牢 固,水眼是否畅通.完全符合操作要求后,把 强磁打捞器与管柱联接,准备入井打捞。 • (2)将强磁打捞器下至落物0.5~1米处开泵 循环冲洗井底落物,继续下放钻柱,保证强磁 打捞器磁头与落物接触,然后边循环冲洗边上 提钻柱0.5~1m,把打捞器转90度角后再边 循环边下放钻柱反复4~6次即可起钻.在钻柱 提到1米后即停泵、起钻时禁止使用转盘卸 扣.以免将被打捞住的落物碰(震)掉。
钻井打捞工具介绍

钻井打捞工具介绍一.公锥公锥是一种从管体内部打捞管状物的工具。
因此,要求被打捞的管状落物要有一定的抗破损强度。
第二,鱼顶的端面和管子内径基本要规则,以便公锥能顺利进入鱼顶。
公锥常用于打捞钻铤的水眼、钻杆接头的水眼、钻杆加厚部分的水眼以及井下特殊工具的水眼部分,带接箍的油管等。
公锥有1:12(高强度公锥,没有排屑槽,锯齿螺纹);1:16;1:24;1:32几种锥度,打捞直管落物应尽量选择1:24或1:32锥度小一些的公锥。
(一)使用公锥下井前必须注意以下几点:1.掌握鱼顶所处井眼段的井眼直径,鱼顶以下钻具的压缩距等。
公锥搬运时严禁摔打,紧扣时防折伤。
2.掌握鱼顶的内径和最大外径。
3.公锥尺寸,包括:水眼、造扣部分最小直径、最大直径、有效扣长,接头最大直径。
丝扣是否完好,检查一下丝扣强度,以不缺不卷为好。
4.公锥造扣部位必须在尖端以后的100㎜以上。
5.分析当鱼顶和公锥在井眼内直径上相反方向各自都绝对靠边时,公锥尖端是否能进入鱼顶水眼内。
6.复杂井段打捞最好使用原钻具结构。
7.根据井内钻具被卡的情况以及被卡后,卡点以上钻具自由段的长度,确定是否使用安全接头,如果打捞钻铤必须使用安全接头。
8.使用安全接头,必须清洁丝扣,分件清洗,掌握对扣和卸扣圈数。
9.准确计算鱼顶方入和造扣方入。
如果井内情况允许和必要时,可下相应尺寸的钻头探鱼顶后再进行打捞。
(二)公锥入井的操作1. 紧公锥接头扣时,接头距转盘面越近越好,避免折伤公锥丝杆,造成井下事故复杂化。
2.下钻要慢,防止井内突然遇阻折断公锥(尤其带有下击器的钻具)。
3.下钻完调试好方入,卸去井口回压凡尔(最好方入调在方钻杆的中部)4.接方钻杆开泵循环,在鱼顶以上0.3~0.5米大排量冲洗鱼顶10-20分钟。
5.掌握并记录开泵时悬重,停泵时悬重。
开泵时上提摩阻悬重,下放时摩阻悬重;停泵时上提摩阻悬重和下放时摩阻悬重。
6.下放钻具探鱼顶A.在有把握公锥绝对能进入鱼顶水眼时,可低排量(记下泵压)开着泵静放探鱼顶。
井下作业油套环空38泵固定凡尔球捕捉打捞器使用说明书

油套环空捕捉管式泵凡尔球打捞器使用说明书
一、执行标准
石油天然气行业标准:5587.13-93《常规修井作业规程井下作业小件打捞方法》
二、产品用途
主要用于打捞落入管式泵凡尔罩(台肩)与套管内壁的凡尔球。
三、产品结构
捕捉管式泵凡尔球打捞器有上接头(内导入孔、带有循环孔球袋)及下接头(引球轨道槽、外导入孔)
四、工作原理
通过不同下入方位(旋转),使打捞管柱(工具)触摸落鱼进入轨道槽,随着钻压的加大,凡尔球沿着轨道槽上移进入外导入孔后,滚入内导入孔,进入循环孔球袋。
起钻带出钢球。
五、操作方法
1、下至鱼顶1~2m时,要求准确记录管柱悬重,开泵清洗鱼顶,待循环液返出和泵压平稳后再慢转下放打捞工具,触摸碰鱼,准确记录碰鱼方入,反复实施三至四次,寻求最大方入,确认钢球入轨后,缓慢施加钻压到5~15KN,致使凡尔球沿着轨道槽上移,方入增加,发现打捞管柱悬重增加至原重量,无卡阻现象,可起钻带出钢球。
2、起钻1~2m后,回放钻具。
要求慢转下放打捞工具,触摸落鱼,若存在卡阻现象,说明打捞无果。
继续实施打捞操作。
六、注意事项
打捞时,轻压慢转,触摸落鱼,缓慢加压,寻求最大放入,确认钢球入轨后,缓慢施加钻压到5~15KN, 发现打捞管柱悬重增加至原重量,无卡阻现象时,停止下放,免除循环孔球袋座损坏凡尔罩。
CL强磁打捞器操作规程
CL强磁打捞器操作规程1、概述强磁打捞器是石油、地质钻探工作中打捞井下小件落物的工具。
它具有结构简单、操作方便、性能可靠、体积小、重量轻等优点,利用本身所带永久磁铁将牙轮、巴掌、大钳牙以及工具等小件落物磁化吸起,从而有效地打捞小件落物,净化井底。
2、结构CL型强磁打捞器如图所示,主要由上接头、下接头、永久磁铁、钢圈、铜圈和平底引鞋等组成。
3、选用方法3.1 对掉入井内的钻夹、巴掌、牙轮、轴承、卡瓦体、卡瓦牙、大钳牙等铁磁性小件以及不能磁化的小尺寸落物(如硬质合金块)等都可选用强磁打捞器。
3.2 强磁打捞器用钻柱送入井底进行打捞作业,如情况允许也可用钢丝绳送入。
3.3 如果井下落物尺寸较大、数量多、分布较广的工况,宜使用平底引鞋;如果井径不规矩或井底呈锥形造成磁芯无法接触落物的情况,宜使用标准引鞋。
但在一般情况下不宜采用标准引鞋。
4、操作4.1 根据井径及落物的特点选用带有合适引鞋的强磁打捞器。
4.2 根据强磁打捞器的长度算出方钻杆下入井内尺寸。
4.3 把强磁打捞器放入预先放好木板的转盘上(防止强磁打捞器与转盘吸附住),并接于钻柱底部,然后提起,取掉转盘上的木板,准备下井。
4.4 将强磁打捞器下至井底离落物3~5m处,开泵循环。
待井底沉砂冲洗干净后,将强磁打捞器慢慢下放至井底(此时钻压不大于一吨),然后上提0.3~0.5m,把强磁打捞器转一方位,再边循环边下放钻柱,这样反复几次,检查方钻杆入井深度,证实强磁打捞器底部确已接触落物时即可起钻。
4.5 起钻开始时必须在钻柱提起0.5~1m后,方可停泵,起钻中禁止采用转盘卸扣。
4.6 操作过程要求平稳、低速、严禁剧烈震动与撞击,以保护磁芯和被吸附的落物。
4.7 当采用标准引鞋时,操作方法与上述方法大体相同,只是在下放钻具的同时应低速转动,但当强磁打捞器底部与落物接触时严禁转动钻柱,以防磁芯被损坏。
5、技术参数CL型强磁打捞器规格及性能参数。
井下打捞工具手册
、公锥1名称型号!GZlOo-1公锥2>用途:专门从油管、钻杆、套铳筒、封隔器等有孔落物的内孔进行造扣打捞的工具。
主要用于有接箍的油管或厚壁管类落物。
3、结构:公锥是长锥形整体结构,分接头和打捞丝扣两部分。
接头上部有与钻杆相连接的螺纹,有正反扣标志槽,便于归类与识别。
4.原理:当公锥进入打捞内孔之后,加适当钻压并转动钻具,迫使打捞丝扣挤压吃入落物内壁进行造扣。
当所造之扣能承受一定的拉力和扭距时,可采取上提或倒扣的办法将落物全部或部分捞出。
5、技术规范:(1)规格型号:GZ105-1 (2)外形尺寸:?105nimx535mni (3)接头螺纹:NC31 (210) (4)使用规范及性能参数:㈠打捞螺纹表面硬度HRC60-65.㈡抗拉极限:大于等于932Mpa.㈢冲击韧性:大于等于cm3•㈣打捞直径;54—77ramo6、操作方法:当工具下至鱼顶上部l-2ni时,开泵循环,并逐渐下放工具至鱼顶,观察泵压变化。
如泵压突然上升,指重表悬重下降,说明公锥进入鱼腔,可以进行造扣打捞。
如果悬重逐步下降而泵压并无变化,说明公锥插入鱼腔外壁的套管环形空间,应上提钻柱,然后转动管柱,重对鱼腔,直至悬重与泵压均有明显变化(公锥入腔),才能加压造扣进行打捞。
打捞鱼腔畅通,泵压无明显变化的落鱼时,应增加扶正找中接头或采用引鞋结构,以防止造扣位置错误,酿成事故。
7>注意事项:打捞操作时,不允许猛顿鱼顶,以防将鱼顶或打捞螺纹顿坏.尤其应注意分析判断造扣螺纹位置,切忌在落鱼外壁与套管内壁的环行空间造扣,以避免造成严重后果。
分类规格型号直径X长度接头螺纹打捞螺纹表面硬度抗拉极限Mpa冲击韧性J/cm"打捞直径修井公锥GZ86-186X560NC26(2A10)HRC60-65932$ 39-67 GZ105-1105X353NC31(210)54-77GZ105-2105X475NC31(210)72-90二、母锥1、名称型号J MZ/NC31-1母锥2、用途:母锥是一种专门从油管.钻杆等管状落物外壁进行造扣打捞的工具。
石油工程技术 井下作业 强磁打捞器--打捞深井泵衬套技术应用案例

强磁打捞器--打捞深井泵衬套技术应用案例采用φ38mm及以上泵进行生产的油井在中原油田所占比例已达到47.3%,由于深井泵在井下工作环境不断恶化,近年来,深井泵泵体断裂,泵内衬套与泵壳脱开,散落于井内的现象不断发生。
泵衬套属小件落物,数量多(φ38mm长泵衬套多达44个),尺寸小,鱼顶情况复杂多变,材质硬度大,与传统的钻、磨、造扣、钩类等常规工具工作面硬度相当,给打捞工作带来很多困难。
下面对P79-1X、胡7-X两口井衬套打捞情况进行分析,提出在深井中合理有效使用强磁打捞器打捞衬套的方法及应注意的问题,通过实施取得较好的经济效益,开创了中原油田深井泵衬套成功打捞的先例。
1强磁打捞方案的提出强磁打捞器是专门用来打捞掉入井内的卡瓦牙、钳牙、小金属物件等小件铁磁性落物的工具。
在φ140mm油层套管中使用强磁打扫捞器,其最大吸力可达6500N,最小吸力也在1700N,适应井温不高于210℃,且不受落物形状的限制。
P79-1X井落物为内径φ32mm深井泵衬套,其外径φ50mm、长150mm,属小件落物中的大件、数量多,内径小,硬度大(HRC60以上),根据其形状和尺寸特点看,衬套在井筒中很容易呈不规则分布,即鱼顶情况是复杂多变的。
这样一来,一些钻、磨、造扣、钩类等打捞工具就不那么奏效,而用强磁打捞器正好可以避开这些常规工具的弱点,从理论上讲应视为最理想的打捞工具,因此提出用强磁打捞器打捞深井泵衬套的方案。
2P79-1X井衬套打捞情况及存在问题分析表1是P79-1X井φ32mm衬套打捞收获情况。
整个打捞工作历时48d,打捞井深2343~3328m,打捞进度平均0.4只/d。
由表1可知,强磁打捞器共下井16趟,仅有4趟成功,成功率25%,打捞效果十分不理想。
2.1通过对整个打捞操作过程进行汇总,发现以下几种情况:表1P79-1X井φ32mm衬套打捞收获情况汇总表下井工具名称下井趟数成功趟数捞出衬套数(只)成功率(%)捞出衬套所占比例(%)强磁打捞器16452529.4公锥10000铅模19442123.5外钩16885047.12.1.1该井起完原上部管柱后首次打印证实鱼顶只有一只衬套直立于井底时,选用强磁打捞器打捞获得成功,捞出衬套一只。
0530井下落物打捞操作规程
0530井下落物打捞操作规程井下落物打捞是指在井下作业过程中,出于安全和环境保护的考虑,对井口、井筒以及井下设施中的落物进行打捞和清理的工作。
为了确保安全、高效完成井下落物打捞工作,制定如下操作规程:一、安全措施:1.确保操作人员具备合格的安全防护用品(安全帽、防滑鞋、防护手套等)。
2.在作业过程中,井筒内必须安装良好的井筒护栏和井口护栏,防止人员误入井口。
3.严格按照标准作业程序进行作业。
4.在井下作业前,需对设备进行全面检查,确保设备安全可靠。
5.严禁单人作业,必须有至少两名操作人员同时进行。
6.为了防止作业现场积水、污染环境,需进行现场围栏设置,并欲设定合理的井下通风系统。
二、作业准备:1.操作人员必须进行相关安全操作培训,具备专业知识和操作技能。
2.确定井筒深度、直径等基本参数,并绘制井筒示意图。
3.清理井口周围区域,保持作业现场清洁,确保操作人员的安全。
4.准备必要的工具和设备,如扳手、螺丝刀、绳子、吊篮等。
三、作业流程:1.操作人员佩戴完整安全装备,按照规程操作和标准信号。
2.在井口附近设置吊装设备,确认设备固定牢靠。
3.使用工具检查井口周围的护栏和通风设备,确保安全。
4.佩戴适当的吊带,进行井下作业前,进行必要的检查,特别是井口下方的设备。
5.使用吊篮和吊索将井口下方的物体提起,移向安全区域。
6.对于井下落物较大的情况,可以根据实际情况使用起重机等大型设备进行搬运。
7.对于井下较深或较大的落物,可以使用无人机进行探测和搬运。
四、应急处理:1.发现井下落物有危险倾向时,立即停止作业。
2.对于无法进行打捞的落物,应立即向相关部门报告,并采取必要措施。
3.发现井下作业过程中的任何异常情况,例如异常声音、颤动等,应立即向相关部门报告,并紧急撤离。
五、维护保养:1.每次作业结束后,对吊索、吊篮等设备进行检查和维护。
2.定期检查井筒和井口附近的护栏、通风设备,确保安全使用。
3.做好记录,及时整改不合格设备和操作问题。
打捞工具使用说明
• 4、原理:下至鱼顶上部1—2m时,开泵 冲洗,并逐步下放工具至鱼顶,如泵压突 然上升,指重表悬重下降,说明公锥入鱼, 加适当的钻压,并转动钻具,迫使打捞丝 扣挤压吃入落鱼内壁进行造扣。当所造之 扣能承受一定的拉力和扭矩时,可采取上 提或倒扣的办法将落物全部或部分捞出。
5、使用方法: (1)根据落鱼水眼尺寸选择公锥规格。 (2)检查打捞部位螺纹和接头螺纹是否完好无损。 (3)测量各部位的尺寸,绘出工具草图,计算鱼 顶深度和打捞方入。 (4)检验公锥打捞螺纹的硬度和韧性。 (5)公锥下井时一般应配接震击器和安全接头。
• 6、注意事项 • (1)钻进中不能停止循环,尤其长时间夜 间施工时,更应严格注意井口返出的洗井 液。 • (2)若钻进中途泥浆泵出现故障停泵时, 应立即将钻具提升至少一个单根,以防止 沉砂卡钻。 • (3)钻头水眼较小,应防止下钻过程中沉 砂堵死水眼。
八、铅模
• 1、结构:主体;加强筋;铅体。 • 2、用途及使用范围:用来探测井下落鱼鱼 顶状态和套管情况的一种常用工具。 • 3、技术规范:套管尺寸5.5in,外径 118mm,长度150mm,(27/8〃TBG) 27/8″平10扣
七、三牙轮钻头
• 5、操作方法 • (1)用钻头规测量钻头尺寸并配好连接接头。 • (2)下井前,地面检查每只牙轮转动是否灵活, 有无较大的松旷。用手转动牙轮,并在巴掌与牙 轮结合缝隙处注机油,然后在接头丝扣处涂丝扣 密封脂,接上钻具下井。 • (3)下至井底前开泵循环洗井并启动转盘,待 转盘运转平稳之后,再缓慢下放、冲净井内沉砂。 • (4)逐步向钻头施加钻压,钻水泥塞时钻压为 钻头尺寸(in)×(0.5~0.8)kN,不宜太大, 否则有可能使钻头变形或使牙轮脱落。 • (5)选用适当的转速,钻水泥塞时一般用50~ 70r/min较为合适。
卡瓦式打捞筒使用方法
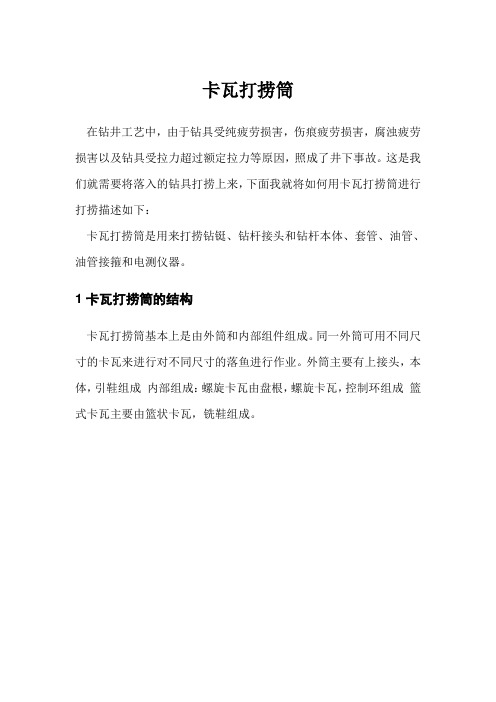
卡瓦打捞筒在钻井工艺中,由于钻具受纯疲劳损害,伤痕疲劳损害,腐浊疲劳损害以及钻具受拉力超过额定拉力等原因,照成了井下事故。
这是我们就需要将落入的钻具打捞上来,下面我就将如何用卡瓦打捞筒进行打捞描述如下:卡瓦打捞筒是用来打捞钻铤、钻杆接头和钻杆本体、套管、油管、油管接箍和电测仪器。
1卡瓦打捞筒的结构卡瓦打捞筒基本上是由外筒和内部组件组成。
同一外筒可用不同尺寸的卡瓦来进行对不同尺寸的落鱼进行作业。
外筒主要有上接头,本体,引鞋组成内部组成:螺旋卡瓦由盘根,螺旋卡瓦,控制环组成篮式卡瓦主要由篮状卡瓦,铣鞋组成。
2 卡瓦打捞筒的常用附件:•加长短节•壁钩•加大引鞋•加长短节有:5-3/4”×36”、8-1/8”×36”,10-5/8”×36”,11-1/4”×36”。
•加大引鞋有:8-1/8”×10-1/2”,8-1/8”×15”,10-5/8”×15”,10-5/8”×21”,11-1/4”×15”,11-1/4”×21”。
•壁钩有:8-1/8”×36”,10-5/8”×36”,11-1/4”×36”。
3卡瓦打捞筒卡瓦的选择:根据井眼和落鱼尺寸的不同,选择不同的打捞筒。
每一种打捞筒有多个不同的打捞尺寸,配有螺旋卡瓦和篮状卡瓦,每种卡瓦上都打有钢号,其打捞范围比钢号大一到三毫米。
4 卡瓦选择原则;卡瓦最大尺寸比落鱼尺寸小一到三毫米。
5 工作原理:打捞筒的抓捞零件是螺旋卡瓦或篮式卡瓦。
它外部的宽锯齿螺纹和内部的打捞牙均是左旋螺纹。
宽锯齿螺纹与筒体间隙较大,这使卡瓦能在筒体中一定的行程内胀大和缩小。
只要施加一轴向压力,落鱼便能进入卡瓦,随着落鱼的套入,卡瓦上行并胀大,在弹性的作用下,卡瓦牙将落鱼咬住。
上提钻柱,卡瓦在筒体内向下运动,直径缩小,落鱼则被抓得更牢。
因为筒体和卡瓦的螺纹都是左旋螺纹,并由控制环约束了它的旋转运动,所以释放落鱼时,只要将卡瓦放松,顺时针方向旋转钻具,捞筒即可从落鱼上退出6检查并装配卸开卡瓦打捞筒,卡瓦打捞筒使检查、使用、维护要求1、丝扣按钻具丝扣检验标准进行检验。
深井救援机说明书

深井救援机械手齐齐哈尔大学目录一、设计背景 (1)二、设计目的 (2)三、创新构思,方案设计 (2)3.1地面支撑部分 (3)3.2定位部分 (4)3.3调位部分 (4)3.4监控部分 (5)3.5夹持部分 (5)夹持部分辅助设备 (7)四、创新设计与已有或者相近产品的异同与创新之处 (7)五、工作原理 (8)六、模型图 (10)七、作品主要创新点 (11)八、应用前景 (12)九、小结 (12)十、参考文献 (13)深井救援机一、设计背景近年来,报纸、电视等媒体多见报道有关孩童掉入小径深井(多为直径25——45cm 水泥管机井)及营救的消息,有的小孩成功的被救起了,可是也有的却不幸献出了生命。
由于井径细小,深度一般较深,成年人无法下井营救,而且还有可能将救援人员卡死在井口。
所以一般的营救的方法是动用挖掘机等大型设备进行施救,此种方法费时、费力、费财,且救援时间过长、安全性差,无法保证井下孩童的生命,如果孩童掉入深度超过15m ,利用挖掘机也无法实施营救。
据有关部门调查表明,每年不慎掉入机井、油井等小径深井的孩童事件就有上千起,加上那些其它一些深井的事件就更多了。
这些情况带来的生命伤害、财产损失是不可估计的,给家人、个人带来巨大的痛苦。
基于这些情况,我们团队经过仔细的分析,认真探讨,结合实际情况配合已有的救援设备,设计出这种深井救援机械手,希望能为深井救援带来更高的效率,更高的成功率,挽救更多的生命。
图1:深井救援现场图2:深井前人们在努力着二、设计目的目前,深井救援装置不多,已有的救援装置也没有得到很好的推广。
大多数情况下是救援人员直接对被困者实施救援,如果井口太小,救援人员不能直接对被困者实施救援时,救援行动往往很难施展,只能通过挖开井口等效率低的方法来实施救援,这样延误了最佳救援时机,终将导致非常严重的后果。
我们设计的深井救援机器手主要目的就是寻找一种用于小径深井救援的专用设备,通过它能够方便、快捷、有效地的解决小径深井中生命救援的问题,同时也为日常生活中重要物件的打捞提供一种方法。
井下工具操作方法
识别工具型号外型尺寸mm 接头螺纹表面硬度GZ86-1 Ф86×560 NC26型号外型尺寸mm 接头螺纹MZ/NC26-3 Ф95×340NC26(210)打捞2"油管接箍、MZ/NC31-1 Ф114×350NC31(210) 打捞21/2"MZ/NC31-2 Ф114×390专门从油管、钻杆等管状落物外壁进行造扣打捞专用工具,可用于无内孔或内孔堵死的圆柱形落物的打捞。
型号外径mm 接头螺纹打捞直径HLM—D60 86 NC26(2A10)42HLM—D73105 NC31(210) 52.6HLM—S73HLM—D8964.1型号外型尺寸mm 打捞范围mm许用拉力LM—T73 Ф95×65154.6~62 535LM—T89 Ф105×67066.1~77.9 814它是从鱼腔内孔进行打捞的工具,可捞自由状态下的管柱,也可抓获遇卡管柱,还可以根据不同的作业要求与安全接头、加上接头、矛杆、花键套、限位块、定位螺钉、卡瓦型号外型尺寸mm 接头螺纹打捞尺寸mm 许用拉力KN 扭矩N.m上接头、筒体、弹簧、卡瓦座、卡瓦、键、垫环、引鞋型号外型尺寸mm接头螺纹打捞尺寸mm许用拉力DLT-114 Ф114×660NC31(210)Ф48~Ф73 950从落鱼外壁进行打捞的不可退式工具,它可抓捞油管、钻杆、加重杆等,型号外型尺寸mm 接头螺纹打捞尺寸mm 许用拉力CLT01Ф55×346 5/8 15~16.7CLT02 3/4 18~19.7 CLT03 7/8 21~22.7套管尺寸外径108~114mm 齿数上接头、钩身、凸轮钩、轴销、扭簧组成接头螺纹钩体长度及钩数NC31(210)1000mm×1 1200mm×2用于打捞深井泵衬套,有内孔小件落物及被压死的绳、缆类。
上下接头、密封圈、胶筒、硫化芯子、中心管、滤网罩型号最大外径mm最小通径mm总长度mm作封压力MPa工作压力MPa工作温度℃K344-114 114 62 910 0.5~0.7 25 120最小通径mm 工作压力MPa偏孔直径mm堵塞器最大外径mm46 25 20 22上接头、活页总成、筒体筒体、钢球、引鞋型号外型尺寸mm 接头螺纹SQ114-01 Ф114×305 6 5/8 5/8。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嵌入式深井打捞机系统的设计摘要: (1)1 系统整体 (1)2 救援系统硬件设计 (2)3 打捞系统软件设计 (3)3.1 嵌人式Linux操作系统 (4)3.2嵌入式打捞机软件系统平台建立 (4)1)uboot移植 (4)2)Linux 移植 (4)3)Yaffs文件系统的建立 (4)3.3 Linux驱动与应用编程 (5)3.4 本打捞系统中Linux下USB摄像机应用程 (5)4 结论 (6)附录: (6)参考文献 (9)摘要:嵌入式深井打捞系统(以后简称打捞系统)在井口较小不方便人进入的情况下,达到打捞物品或必要时候有救援的用途,这种系统大大减轻了劳动强度和危险性,提高了工作效率。
打捞系统是机械系统,嵌入式实时控制系统,自动化智能控制的重要组成部分,是集ARM与Linux系统、自动导向,图像采集、机电一体的新型产物;目前,该系统可应用在小口水井,管道打捞等领域。
而当机械设备与嵌入式Linux结合,其最大的特点是:1)减少了研制开发周期,系统可升级性强;2)价格大幅度降低,便于市场普及。
1 系统整体打捞系统采用Samsung公司$3C2440A 的ARM9处理器主频最高可达400 MHz,通过在USB接口外接一个带USB口的CMOS摄像头,将采集HSL空问的图像,并二值化,显示在qt的可视化窗口上,然后通过可视化的控制平台进行手动和自动的模式,有反馈的进行控制。
自动模式下我们能通过手动设置设置开启和关闭分立的六个机械爪子,以便于控制抓取位置,避免对被打捞物的损伤。
同时我们可以设置抓取的三个档位,实现3——1步完成本次是抓取过程;手动模式下与自动模式基本相同,唯一不同的可以实现六个机械爪子的单步执行。
本系统最大特点是使用了嵌入式Linux操作系统。
嵌入式Linux用于机械控制系统势必大大减少了工作量,因为操作系统将控制软件的通用部分抽取出来,抽象为一个底层硬件系统和上层软件系统之间的不同,而在设计新的嵌入式控制系统时,只需编写应用程序以及驱动,就可快速的完成一个全新的嵌入式系统,而且嵌入式Linux的打捞系统在很容易原有基础上进行系统功能的扩展,如实现无线监视,无线遥控,进一步添加传感器等,必将使得在Linux下可以做到很短时问设计出一个功能强大,高效,低成本的打捞系统,如图1嵌入式Linux视频导航AGV系统框图。
2 救援系统硬件设计系统选用S3C2440A作为CPU,在S3C2440A上具有五个16位寄存器,由于嵌入式io 有很多复用功能,引脚非常珍贵,我们其中还用到了串口功能减少io引脚的浪费。
另外S3C2440A处理器内部集成的USB HOST控制器支持两个USBhost通信端口,其符合USB1.1协议规范,用其进行视频信息的采集,以下进行模块说明:图2 嵌入式打捞机的硬件结构CPU制模块如图2所示,电路包括核心CUP,JTAG调试电路,USB接口,存储电路,复位电路等,采用一颗ARM核心的嵌入式CPUs3C2440A结合外围扩展元件组成小型嵌入式系统。
运行Linux操作系统。
ARM处理器的主要应用领域有工业控制、Intemet设备、网络和调制解调器设备、移动电话等多种多媒体和嵌入式应用,S3C2440A是三星公司开发的一款32位RISC处理器,采用了ARM 920T核心,支持WINDOWS CE和LINUX操作系统,内置SDRAM控制器,液晶控制器,sD控制器,AD 转换器。
可以方便地扩充所需的设备而不用增加外围元件。
存储器分为FLASH存储器和SDRAM存储器,FLASH存储器是一种非易失性存储器,掉电后数据不丢失。
所以用来保存系统引导程序、OS、应用程序和重要数据。
电路上程序存储器采用了K9XXX08UOA-PCB0。
其容量为256 Mbytes,电路上采用兼容设计,可以根据需要采用不同容量的存储器。
SDRAM是一种随机读取存储器,掉电后数据不保存,但是其读写速度非常快。
所以,一般用作为程序的运行空间。
系统引导以后,将FLASH中的程序解压缩到SDRAM中运行,提高系统的运行速度。
电路设计中选择K9F1216U0A,容量为32MBytes,采用2片组成64M,32位存储系统。
复位电路,提供CPU和外围设备上电复位和按键复位。
使用一片美信公司专用复位芯片MAX8860EUA18。
电路结构简单,复位可靠,提供标准的20 PJTAG 调试接口。
可以下载烧写板上BOOTLOADER程序。
3 打捞系统软件设计所有软件在Fedora 10环境下建立嵌入式Linux开发所需要的交叉编译环境,安装编译工具,编译内核,制作yaffs根文件系统并添加驱动程序以及应用程序,该打捞系统软件主要分为三个模块:图形控制界面、执行部分和反馈部分。
整个Linux软件模块如图3所示。
图3 软件模块3.1 嵌人式Linux操作系统Linux操作系统内核稳定、功能强大、支持多种11期安源,等:一种嵌入式Linux 视觉引导AGV系统的设计 2549硬件平台、且源代码完全开放,软硬件均可裁减适合于嵌入式开发应用,虽然Linux内核本身不具备强实时陛,并不是一个专门为嵌入式设计的操作系统,且内核体积较大,而且一般嵌入式系统的硬件资源有限。
但是,如果对Linux通过配置内核,裁减shell和嵌入式c库对系统定制,使整个系统能够存放到容量较小的FLASH中,Linux进行实时化和嵌入式化便是可行的。
3.2嵌入式打捞机软件系统平台建立1)uboot移植去网站下载uboot 1.1.6的源码包,参照2420的配置修改2440的板子的支持,根据笔者经验,如果是nor flash启动汇编start.s文件几乎不用改,因为在进入start_armboot的c入口点的时候会自动初始化。
直接修改speed.c文件,因为2420和2440的总线时钟分频计算不同,根据2440手册get_PCLK函数中多了2倍的关系,修改一下。
到此为止串口就能打印出信息,加上几个自定义的命令,然后移植usbslave,网上有大把的usbslave资料,这里不做介绍。
能够在nor flash上运行之后就是叫板子支持nand flash,因为nand不能直接运行代码,必须复制到内存重运行,需要修改start.s重写代码复制到内存的这段,把nand flash的驱动加上就ok了。
2)Linux 移植首先填写machine_desc结构体,支持当前开发板,因为linux第一个汇编文件head.s,调用检测cpu 支持id的__lookup_processor_type和板级支持的__lookup_machine_type段校验,arm920 的id是0x41129200不用管,板级校验machine_desc时候要自己填写要不引导不能通过。
在这里要注意uboot和linux 的机器码必须一致,要不uboot想linux传递参数的时候,linux不能通过机器码校验。
完成以上,就可以在menuconfig上配置自己板子的linux了,网上配置arm linux 的时候大同小异,自己琢磨一下就ok了。
3)Yaffs文件系统的建立我们用busybox制作文件系统,把相应的linux交叉编译出来的指令、库和模块驱动都加入进去,修改一些启动脚本,就完成了文件系统的制作。
4)Qtopia图形平台的移植下载源码包,首先编译pc下的qtopia模拟平台,然后编译arm平台的qt,最后把一些程序和库加入到制作好的文件系统里,修改启动脚本rc,完成qt的移植3.3 Linux驱动与应用编程本系统中有USB的CMOS摄像头,以及oi控制需要驱动程序的编写,一般需要进行以下几步:(1)给file—operations结构赋初值l2]。
一般语句为:static struct file_operations_fops={,Open:用户定义功能函数,Read:用户定义功能函数,Write:用户定义功能函数,Release:用户定义功能函数。
}.(2)设计open、read、write、release后用户定义的功能函数,实现设备的选定、读、写等功能。
(3)设计一init函数实现向内核注册设备。
(4)设计module—init驱动程序的模块人口当整个驱动程序写完后,需要编写Makefile文件,这样可以利用交叉编译环境在主机上生成AGV系统可执行的目标文件,最后利用insmod命令向内核加载编写好的驱动程序,这样就会在Linux系统的/dev下产生一个新的逻辑设备结点。
3.4 本打捞系统中Linux下USB摄像机应用程序的编写本系统中摄像头所实现的任务是进行数据采集,以便处理,而摄像头是视频类设备。
在目前的Linux中,Video4Linux是其下用于获取视频和音频数据的API接口,V4L定义了套接口,内核、驱动、应用程序以这个接口为标准进行交流。
本系统中的USB摄像头受到V4L支持。
图像采集的程序流程如下:(1)打开AGV系统的COMS摄像头;(2)读取CMOS摄像头的信息;(3)更改CMOS摄像头当前设置;(4)进行CMOS摄像头图象采集时我们有两种方法可以选择:①内存映射,②直接从设备读取;(5)对CMOS摄像头采集的视频进行处理压缩,采用jpg压缩格式,完成位图到灰度颜色空间的转换并用Qpixmaps类的repainer刷新缓冲池。
用DateToLoader()加载数据到缓冲池;(6)关闭CMOS摄像头。
4 结论随着控制系统功能变的复杂,现实中的系统已经再不是过去逻辑结构简单隋况下进行设计了,从新设计一个新的控制软件系统的费用还有软件人员的工作量会成倍的增加,那么基于Linux嵌入式操作系统的用于打捞系统势必大大减少了工作量,原因就像我们说过的因为有了操作系统,而在设计新的嵌入式控制系统时,只要编写应用程序以及驱动,就可快速的完成一个全新的嵌入式系统而也是因为操作系统的出现使得嵌入式Linux的控制在很容易原有基础上进行系统功能的扩展,如实现无线监视,无线遥控,进一步添加传感器进行数据融合等,必将使得在Linux下可以做到很短时间设计出一个功能强大,高效,低成本的打捞系统。
附录:程序片段#include<reg51.h>#include <intrins.h>typedef unsigned char U8;typedef unsigned int U16;#include<string.h>sbit P2_0=P2^0;U8 U8FLAG,U8temp;U8 U8T_data_H,U8T_data_L,U8RH_data_H,U8RH_data_L,U8checkdata;U8U8T_data_H_temp,U8T_data_L_temp,U8RH_data_H_temp,U8RH_data_L_temp,U8c heckdata_temp;U8 U8comdata;void Delay_10us(void){U8 i;i--;i--;i--;i--;i--;i--;}void init_ser1(){REN=1;SM0=0;SM1=1;TMOD=0x20;TH1=0xFD;TL1=0xFD;EA=1;TR1=1;ES=1;}void Delay(U16 z){U16 x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}void COM(void){U8 i;for(i=0;i<8;i++){U8FLAG=2;while((!P2_0)&&U8FLAG++); Delay_10us();Delay_10us();//Delay_10us();U8temp=0;if(P2_0)U8temp=1;U8FLAG=2;while((P2_0)&&U8FLAG++); if(U8FLAG==1)break;U8comdata<<=1;U8comdata|=U8temp;}}void RH(void){P2_0=0;Delay(180);P2_0=1;Delay_10us();Delay_10us();Delay_10us();Delay_10us();P2_0=1;if(!P2_0){U8FLAG=2;while((!P2_0)&&U8FLAG++);U8FLAG=2;while((P2_0)&&U8FLAG++);COM();U8RH_data_H_temp=U8comdata;COM();U8RH_data_L_temp=U8comdata;COM();U8T_data_H_temp=U8comdata;COM();U8T_data_L_temp=U8comdata;COM();U8checkdata_temp=U8comdata;P2_0=1;U8temp=(U8T_data_H_temp+U8T_data_L_temp+U8RH_data_H_temp+U8RH_data_L_ temp);if(U8temp==U8checkdata_temp){U8RH_data_H=U8RH_data_H_temp;U8RH_data_L=U8RH_data_L_temp;U8T_data_H=U8T_data_H_temp;U8T_data_L=U8T_data_L_temp;U8checkdata=U8checkdata_temp;}}}void xz(char temp){RI=0;//ES=0;//SBUF=temp;while(!TI);TI=0;ES=1;}void main(){init_ser1();while(1){RH();xz(0x01);xz(0x01);xz(U8RH_data_H);xz(U8RH_data_L);xz(U8T_data_H);xz(U8T_data_L);}}参考文献1.苗忠良,宛斌,Qtopia编程之道1 许杭,许榕,叶庆泰,嵌入式Linux在AGV控制中的应用研究,计算机工程与应用,2003;(25):2 孙天泽,等著.嵌入式设计及Linux驱动开发指南——基于ARM9处理器(第二版).北京:电子工业出版社,3 张进,叶庆泰,AGV视觉引导控制的研究.起重运输机械,2003;(8):4 IMAQ Vision Concepts Manua1.National Instuments,2000;(10):345 Thyagarajan R.A motion control algorithm for steering all AGV in an outdoor environment.University of Cincinnati,20006 Kalyan K,Hall E L.Steering control system for a movile robot.Proeedings of SPIE—— The international Society for Optical Engineering,Society of Photo—orltical Instrumentation Engineers,1997;3208:162— 1697 Dof R C,Bishop R H.Mordern Control Systems.8 许峰,李东海,薛亚丽.基于ITAE指标的PID参数整定方法比较研究.中国电机工程学报,2003;(8):Design for Vision-guided AGV System Based on Embedded LinuxAN Yuan |-.MA Cai—wen。