模糊仿人智能控制器的分析与应用
《智能控制》课程教学大纲(本科)
《智能控制》课程教学大纲注:课程类别是指公共基础课/学科基础课/专业课;课程性质是指必修/限选/任选。
一、课程地位与课程目标(-)课程地位《智能控制》是自动化专业的专业教育课程,代表着自动控制理论发展的新阶段,教学目的是培养学生掌握智能控制的基本概念,熟悉智能控制系统分析设计的一般方法及其应用。
本课程以智能控制中发展比较成熟的模糊控制、神经网络技术的理论与应用作为主要教学内容,介绍在工业领域中用传统方法难以解决的复杂系统的控制问题。
学生通过本课程的学习,可掌握智能控制系统的基本概念、工作原理、设计方法和实际应用,具备初步的运用智能控制理论和技术,对复杂控制工程问题进行分析、设计及解决实际问题的能力。
(二)课程目标(1)理解智能控制的基本概念,熟悉智能控制系统分析与设计的理论知识体系,具有面向自动化领域复杂控制工程问题的理解能力;培养大学生的科学精神,实事求是、开拓进取;(2)掌握模糊控制及人工神经网络的基本原理,具有运用智能控制理论,针对复杂控制工程问题进行计算和模拟的能力;培养大学生顽强拼搏、不畏挫折、勇于创新的精神。
(3)掌握智能控制系统设计的基本方法,具有运用智能控制理论和技术,针对复杂控制工程问题进行分析、设计和改进的能力。
二、课程目标达成的途径与方法《智能控制》课程教学以课堂教学为主,结合自主学习和上机教学,针对难以建模的控制对象,学习用模糊控制或人工神经网络控制的基本理论和方法,分析控制系统任务需求, 设计控制器的专业基础知识。
培养学生掌握智能控制的基本概念,熟悉智能控制系统分析设计的一般方法,具备初步的运用智能控制理论和技术,针对复杂控制工程问题进行分析、设计和改进的能力。
(1)课堂教学主要讲述智能控制的基本概念,基本原理、基本设计方法,在课堂教学中,充分引入互动环节,提高教学效果。
通过指导学生学习使用MATLAB仿真软件,进行简单的工程实例设计,使学生能够更加容易理解抽象的理论知识,提高学习兴趣,熟悉智能控制系统分析与设计的理论知识体系,形成良好的思维方式和学习方法。
硝化棉煮洗过程仿人智能模糊控制

文 中设 计 了仿 人智 能 与 模 糊控 制 相 结 合 的仿 人智 能模 糊控 制器 , 其应 用于 硝化 棉 的煮洗 温度 将
控制 .
1 仿人智能控制原理
仿人 智能 控制 器 的原算 法 于 17 年 重庆 大学 99
蒸 汽 刺 器
文章 编号 : 1 7 —9 5 2 0 ) 65 50 6 39 6 ( 0 7 0 5 —3
硝 化 棉 煮 洗 过 程 仿 人 智 能 模 糊 控 制
高 丽 ,安 琳 ,敬 伟 ,王 鹏
( 西安工业大学 电信_ 程学 院, [ 西安 7 0 3 ) 1工艺过程 控制 煮洗温度 的控 制精 度 , 中分析 了硝 化棉 煮洗工 艺 文
制 器不 断记 录偏 差 的极 值 , 正控 制 器 的输 出 , 校 以
影 响硝 化 棉 安定 处 理 质 量 主要 的 因素有 煮 洗
适应变化的要求. 仿人智能控制器的算法_为 5
,
温度 和煮洗 时 间. 洗桶 内各 点 的温度 应均 匀 以保 煮 证产 品质量 的均匀 性 . 因此 , 要保 证 硝 化 棉 安 定 处
制在内的单一控制方法均存在一定局限性 , 因此要 考虑 各种 控制方 法 的集成 [. 6 仿人 智能 与模 糊控 制 ]
相结 合 的仿人智 能 模 糊 控制 器 具 有模 糊 控制 器 的
() 1
1 l
.
( > 0 U P ≠ 0 )
模糊 控 制 与专 家控 制 系统 相 结 合 的控 制 方 法_ 并 3
*
收 稿 日期 :0 70~8 2 0 —92 基 金 资助 : 西 省 教 育 厅 专 项 科 研 计 划 项 目 (6K2 3 陕 0J 7 ) 作 者 简介 : 丽 (9 5) 女 , 安 工 业 大学 教 授 , 高 1 6一 , 西 主要 研 究 方 向为 智 能 控 制 策 略 优 化 与 技 术 集 成 . - i goixt s a cm. E mal a l i i 。o : _ @ n
模糊控制的现状与发展
模糊控制的现状与发展模糊控制:从理论到实践的全面解析引言随着科技的快速发展,自动化和智能化成为了各个领域追求的目标。
在控制领域中,模糊控制是一种重要的智能控制方法,它通过对不确定性和模糊信息的处理,实现了对复杂系统的有效控制。
本文将介绍模糊控制的现状、挑战及未来发展。
现状模糊控制作为一种经典的智能控制方法,已经在许多领域得到了广泛的应用。
例如,在工业生产中,模糊控制被用于控制温度、压力等参数;在汽车控制系统中,模糊控制被用于优化燃油喷射、变速器控制等。
虽然模糊控制已经取得了许多成果,但仍然存在一些不足之处,如缺乏完善的理论基础、控制精度不够高等。
挑战1、理论方面的问题:模糊控制的理论体系尚不完善,许多关键问题仍未得到很好的解决。
例如,如何建立有效的模糊推理机制,如何选择合适的模糊集合和运算符等。
2、实际应用面临的困难:虽然模糊控制在某些领域已经得到了成功的应用,但在面对复杂的、大规模的系统时,其性能和稳定性仍有待提高。
此外,模糊控制在处理具有高度非线性和不确定性的系统时,也存在着一定的难度。
展望1、技术趋势:随着机器学习、深度学习等技术的发展,未来的模糊控制将更加注重自适应、自组织和自学习的能力。
通过引入新的理论和技术,模糊控制将更好地应对各种复杂和不确定的环境。
2、应用前景:随着工业4.0、智能家居、自动驾驶等领域的快速发展,模糊控制将有着更广泛的应用前景。
例如,在智能家居中,模糊控制可以用于优化能源消耗;在自动驾驶中,模糊控制可以用于实现车辆的稳定性和安全性控制。
结论模糊控制作为智能控制的一个重要分支,具有广泛的应用前景和重要的理论价值。
虽然目前模糊控制还存在一些问题和挑战,但随着技术的不断进步和应用领域的扩展,模糊控制将会有更大的发展空间和更重要的地位。
因此,我们应该充分重视模糊控制的研究和应用,为其发展提供更多的支持和资源,同时也需要进一步加强学科交叉和融合,推动模糊控制技术的不断创新和发展。
芯片级PCR仪温度模糊PID控制器设计与仿真
f z y c n r l rw t w n u n h e u p t se tb ih d I w s u e o c n tu tt e smu ain mo e fmir c i e e u z o t l i t o i p ta d t r e o t u swa sa l e . t a s d t o sr c h i l t d lo c o hp l v l oe h s o
PD控制算法很难解决 温度快 速切换 与扰动抑制 之间 的矛 盾 、 I 结构简单性 与系统鲁棒性之 间的矛盾 、 静态与动态性能 间的矛
盾 。
(5 ) 5℃ 和延伸 区(2C , 7 ̄ )通过 2 ~ 0次温度循环 , 可实 现整 0 3 便
个扩增 过程 “J 。其 典型温度设定 曲线如 图 1 所示 。
属度 函数 。其 中温度偏差的模糊隶属 函数如 图 4所示 。
l “L ) e
Z PZ
PS
PM
P B
一
l0 — 0 o 8
- 0 4
—0 0 2 2 0
e
一
4 0
8 0
10 0
冒鼙 玻璃盖片 口皿 疆 [==] D S PM 臣圈
半导 体制冷片函受 强圜 电 风扇 导热双面胶 — ' A 乘性蛇形铜导线 Wf /— ff
l o t m V g e t u e t e e au e o e s o ta d a h e e te p e ie c n r ftmp r tr S mu t e u l hs lo a g r h , a r a y r d c e tmp rt r v r h o n c iv h r c s o t lo e e au . i l n o s t i ag — i n l e h o e a y, rt m a t n e o u t e oma c h n t e ca sc I o t lag r h , n ti e y t e i . i h h ssr g rr b s r r n e t a h l ia P D c n r o t m a d i s a or a z o pf s l o l i s l e
仿人智能推理与控制器的实现

Ke , r s It l g n o to , o u e o t l Hu n l e I t l g n o to y ' d : n el e t c nr l Cห้องสมุดไป่ตู้mp t r c n r , ma i n e ie t c n r l w o i o k
_
1 引 言
人的思维可分为三类 : 象( 形 直感 ) 维 、 象 ( 辑 ) 维 思 抽 逻 思 和 灵感 ( 顿悟 ) 维 。 其 中形 象 思 维 和抽象 思维 是 基 本 形 式 , 思 灵 感 思维 是上 述 两 种 思 维基 础 上 的 交 叉 、碰 撞 出的 思 维 火 花 一 刨 造 性 思 维 。人 的 思 维 包括 上 述 三种 形 式 , 的控 制 思 维 也 包 括 人 上 述 三 种 形式 。 但 人 的控 制思 维 同一 般 的思 维 有 一 定 的 区别 。
—
c nrli pee td i h rvo s p p  ̄ n ti p p rb sd o h ige ip ts ge o tu ytm , a tu tr o t s rs ne n te pe iu a e l hs a e a n te sn l n u i l up tsse a r lsrcue o . I e n e
一
2 仿 人智 能推理 与 控制器 的 实现
仿 人 智 能 推 理 与控 制器 的实 现 如 图 1 示 所 各 个 模 块 功 能介 绍 如 下 : .
21 数 据 处 理 模 块 .
数 据处 理 模 块 完 成 偏 差 和 偏 差 变 化 的 计 算 . 并 对 其 比例 化 、 化 和模 糊 化 。 偏 差 ( 和偏 差 的 变 化 ( C 的 论 域 取 为 : 量 E) E)
智能控制技术(模糊控制)
INTELLIGENT CONTROL
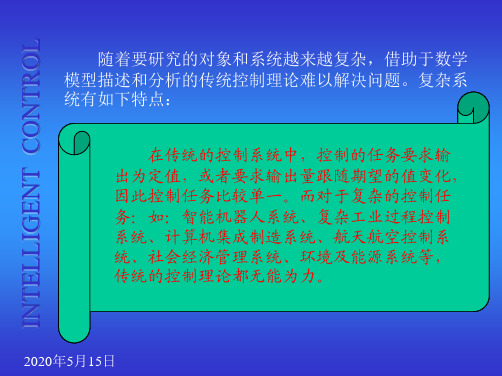
随着系统复杂程度的提高,将难以建立系统的精 确数学模型和满足实时控制的要求。 人们希望探索一种除数学模型以外的描述手段和 处理方法。 例如: 骑自行车 水箱水温控制
2011年4月10日
INTELLIGENT CONTROL
模糊控制就是模仿上述人的控制过程,其中包 含了人的控制经验和知识。从这个意义上来说,模 糊控制也是一种智能控制。模糊控制方法既可用于 简单的控制对象,也可用于复杂的过程。 模糊控制是以模糊集合论作为数学基础。 1965年L.A.Zandeh(美国教授)首先提出了模糊集 合的概念。 1974年E.H.Mamdani(英国教授)首先将模糊集合 理论应用于加热器的控制。 典 型 例 子
2011年4月10日
INTELLIGENT CONTROL
二、模糊控制的特点 特点: (1)无需知道被控对象的数学模型 (2)是一种反映人类智慧思维的智能控制 (3)易被人接受 (4)构造容易 (5)鲁棒性好
2011年4月10日
INTELLIGENT CONTROL
第二节
模糊集合论基础 一、模糊集合的概念 二、模糊集合的运算 三、隶属函数的建立 四、模糊关系
2011年4月10日
INTELLIGENT CONTROL
现代控制系统的数学模型难以通过传统的数学工具 来描述。就是说,采用数学工具或计算机仿真技术的传 统控制理论,已无法解决此类系统的控制问题。 从生产实践中可以看到,许多复杂的生产过程难以 实现的目标,可以通过熟练的操作工、技术人员或专家 的操作得到满意的控制效果。 如何有效地将熟练操作工、技术人员或专家的经验 知识和控制理论结合,去解决复杂系统的控制问题,就 是智能控制研究的目标。
基于matlab的模糊控制器的设计与仿真
基于MATLAB的模糊控制器的设计与仿真摘要:本文对模糊控制器进行了主要介绍。
提出了一种模糊控制器的设计与仿真的实现方法,该方法利用MA TLB模糊控制工具箱中模糊控制器的控制规则和隶属度函数,建立模型,并进行模糊控制器设计与仿真。
关键词:模糊控制,隶属度函数,仿真,MA TLAB1 引言模糊控制是一种特别适用于模拟专家对数学模型未知的较复杂系统的控制,是一种对模型要求不高但又有良好控制效果的控制新策略。
与经典控制和现代控制相比,模糊控制器的主要优点是它不需要建立精确的数学模型。
因此,对一些无法建立数学模型或难以建立精确数学模型的被控对象,采用模糊控制方法,往往能获得较满意的控制效果。
模糊控制器的设计比一般的经典控制器如PID控制器要复杂,但如果借助MATLAB则系统动态特性良好并有较高的稳态控制精度,可提高模糊控制器的设计效率。
本文在MATLAB环境下针对某个控制环节对模糊控制系统进行了设计与仿真。
2 模糊控制器简介模糊控制器是一种以模糊集合论,模糊语言变量以及模糊推理为数学基础的新型计算机控制方法。
显然,模糊控制的基础是模糊数学,模糊控制的实现手段是计算机。
本章着重介绍模糊控制的基本思想,模糊控制的基本原理,模糊控制器的基本设计原理和模糊控制系统的性能分析。
随着科学技术的飞速发展,在那些复杂的,多因素影响的严重非线性、不确定性、多变性的大系统中,传统的控制理论和控制方法越来越显示出局限性。
长期以来,人们期望以人类思维的控制方案为基础,创造出一种能反映人类经验的控制过程知识,并可以达到控制目的,能够利用某种形式表现出来。
而且这种形式既能够取代那种精密、反复、有错误倾向的模型建造过程,又能避免精密的估计模型方程中各种方程的过程。
同时还很容易被实现的,简单而灵活的控制方式。
于是模糊控制理论极其技术应运而生。
3 模糊控制的特点模糊控制是以模仿人类人工控制特点而提出的,虽然带有一定的模糊性和主观性,但往往是简单易行,而且是行之有效的。
WORD型模糊控制电子教案
WORD型模糊控制电子教案第一章:模糊控制基础1.1 模糊控制简介模糊控制的起源和发展模糊控制与传统控制的比较模糊控制的应用领域1.2 模糊集合与模糊逻辑模糊集合的定义和表示模糊逻辑的基本原理模糊推理与模糊判断1.3 模糊控制系统的结构与原理模糊控制系统的组成模糊控制器的结构与设计模糊控制算法的实现第二章:WORD型模糊控制器的结构与设计2.1 WORD型模糊控制器的概述WORD型模糊控制器的定义和特点WORD型模糊控制器的应用领域WORD型模糊控制器的设计要求2.2 WORD型模糊控制器的结构设计输入输出层的结构设计模糊化层的结构设计规则库的设计解模糊层的结构设计2.3 WORD型模糊控制器的参数设计模糊集合的划分与选择隶属度函数的设计模糊规则的设计与优化第三章:WORD型模糊控制器的仿真与优化3.1 WORD型模糊控制器的仿真方法模糊控制仿真系统的构建模糊控制仿真的基本步骤仿真结果的分析和评估3.2 WORD型模糊控制器的优化方法基于规则的优化方法基于隶属度函数的优化方法基于控制效果的优化方法3.3 WORD型模糊控制器的性能改进改进控制器的动态性能提高控制器的鲁棒性降低控制器的计算复杂度第四章:WORD型模糊控制器在电子系统中的应用4.1 WORD型模糊控制器在温度控制系统中的应用温度控制系统的原理与结构WORD型模糊控制器的设计与实现仿真结果与实际应用效果分析4.2 WORD型模糊控制器在速度控制系统中的应用速度控制系统的原理与结构WORD型模糊控制器的设计与实现仿真结果与实际应用效果分析4.3 WORD型模糊控制器在其他电子系统中的应用例如:电机控制系统、控制系统等第五章:WORD型模糊控制器的实验与验证5.1 WORD型模糊控制器的硬件实验平台实验硬件的选择与搭建实验系统的调试与验证5.2 WORD型模糊控制器的软件实验平台实验软件的选择与使用实验数据的采集与分析5.3 WORD型模糊控制器的实验结果与验证实验结果的对比与评估实验结果的实际应用价值第六章:WORD型模糊控制器的设计实例6.1 电机控制系统中的WORD型模糊控制器设计电机控制系统的原理与结构WORD型模糊控制器的设计与实现电机控制系统仿真与实际应用效果分析6.2 控制系统中的WORD型模糊控制器设计控制系统的原理与结构WORD型模糊控制器的设计与实现控制系统仿真与实际应用效果分析6.3 其它实例及WORD型模糊控制器的设计与应用如:风力发电控制系统、无人驾驶控制系统等第七章:WORD型模糊控制器的性能分析与评估7.1 WORD型模糊控制器的静态性能分析稳态误差分析静态特性曲线分析7.2 WORD型模糊控制器的动态性能分析动态响应特性分析过渡过程性能分析7.3 WORD型模糊控制器的性能评估指标控制效果评估指标系统稳定性评估指标计算复杂度评估指标第八章:WORD型模糊控制器的优化方法8.1 基于遗传算法的WORD型模糊控制器优化遗传算法的基本原理与实现遗传算法在WORD型模糊控制器优化中的应用优化结果分析与评估8.2 基于粒子群优化算法的WORD型模糊控制器优化粒子群优化算法的基本原理与实现粒子群优化算法在WORD型模糊控制器优化中的应用优化结果分析与评估8.3 基于神经网络的WORD型模糊控制器优化神经网络的基本原理与实现神经网络在WORD型模糊控制器优化中的应用优化结果分析与评估第九章:WORD型模糊控制器的实际应用与案例分析9.1 WORD型模糊控制器在工业领域的应用案例如:工业生产线自动控制系统、化学工业过程控制系统等9.2 WORD型模糊控制器在农业领域的应用案例如:农业自动化控制系统、智能灌溉系统等9.3 WORD型模糊控制器在日常生活领域的应用案例如:智能家居控制系统、智能交通控制系统等第十章:WORD型模糊控制器的未来发展趋势与展望10.1 WORD型模糊控制器技术的发展趋势新型模糊控制算法的研究与发展WORD型模糊控制器与其他控制技术的融合跨学科研究与创新应用10.2 WORD型模糊控制器在未来的应用前景应用于更多领域的智能化控制系统与、大数据等技术的结合为人类社会带来的福祉与贡献重点和难点解析一、模糊控制基础:理解模糊集合与模糊逻辑的基本概念,以及模糊控制系统的原理和结构。
基于模糊控制的全位移平衡机器人设计

收稿日期:2022-04-16基金项目:山东省自然科学基金项目(ZR2020MF093);山东省研究生教育优质课程(SDYKC20026);中石油重大科技合作项目(ZD2019 183 003)引用格式:刘恒,李哲,杨明辉,等.基于模糊控制的全位移平衡机器人设计[J].测控技术,2023,42(7):102-109.LIUH,LIZ,YANGMH,etal.DesignofFullDisplacementBalancingRobotBasedonFuzzyControl[J].Measurement&ControlTechnology,2023,42(7):102-109.基于模糊控制的全位移平衡机器人设计刘 恒,李 哲,杨明辉,邓晓刚,曹玉苹(中国石油大学(华东)控制科学与工程学院,山东青岛 266580)摘要:设计了一种模糊控制的四轮全位移平衡机器人,通过SolidWorks改进设计了基于麦克纳姆轮的全位移平衡底盘、双轴云台等机械结构。
以AltiumDesigner为开发平台设计了STM32F405核心板主控,外设电路设计主要包括:ICM20948传感器电路、CAN通信差分电路等。
使用Simulink对算法进行仿真验证,云台控制算法使用了串级PID控制,底盘通过HI220陀螺仪传感器结合模糊控制算法实现平衡及运动。
最终制作出了实体机器人并对模糊控制算法进行了验证,与传统PID算法相比,基于模糊控制的平衡机器人在响应速度、鲁棒性、稳定性等方面均有一定的提升。
相比于传统四轮机器人,制作的平衡机器人能够更好地通过狭小的空间,对环境的适应性更强。
关键词:模糊控制;视觉识别;全位移;平衡机器人中图分类号:TP242.6 文献标志码:A 文章编号:1000-8829(2023)07-0102-08doi:10.19708/j.ckjs.2022.08.298DesignofFullDisplacementBalancingRobotBasedonFuzzyControlLIUHeng牞LIZhe 牞YANGMinghui牞DENGXiaogang牞CAOYuping牗CollegeofControlScienceandEngineering牞ChinaUniversityofPetroleum牗EastChina牘牞Qingdao266580牞China牘Abstract牶Afour wheelfulldisplacementbalancingrobotwithfuzzycontrolisdesigned.ThroughSolidWorks牞mechanicalstructuressuchasfulldisplacementbalancingchassisandbiaxialheadaredesignedbasedonMc Namwheel.STM32F405coreboardmaincontrolisdesignedwithAltiumDesignerasthedevelopmentplat form牞andtheperipheralcircuitdesignmainlyincludes牶ICM20948sensorcircuit牞CANcommunicationdiffer entialcircuit牞etc.Simulinkisusedtosimulateandverifythealgorithm牞thegimbalcontrolalgorithmusescas cadePIDcontrol牞andthechassisisbalancedandkinematicbyusingtheHI220gyroscopesensorcombinedwithfuzzycontrolalgorithm.Finally牞asolidrobotisproducedandthefuzzycontrolalgorithmisverified.Com paredwiththetraditionalPIDalgorithm牞thebalancedrobothascertainimprovementinresponsespeed牞robust nessandstability.Comparedwiththetraditionalfour wheelrobot牞thebalancingrobotcanbetterpassthroughthesmallspaceandhasstrongeradaptabilitytotheenvironment.Keywords牶fuzzycontrol牷visualrecognition牷fulldisplacement牷balancedrobot随着世界经济和科技的高速发展以及人口数量的不断增多,人类对于各类资源的需求与日俱增,促使各国纷纷开始对未知风险的领域与地区进行资源的勘探与开发。
仿人智能PID控制器的设计与应用

( ajn o t h i U i rt, , MN n n 10 9,hn ) N ni P l e n n e i 肋 af g20 0 C ia g y c c v sy i
Absr c : n ve o h a tt a e me a in p o e swo l a e s me un e ia l fe t , uc t a t I iw ft e f c h ta f r ntt r c s u d h v o d sr b e ef cs s h o a n e ti t n n i a iy,a g i a ec,h a r p e e t i d o u n—i l t n it l g n s u c ran y, o l ne rt lr e t me lg, t t e p pe r s n s a k n fh ma smu a i n e l e t o i P D o r ltr h i ue i o i a in wih t e sr n o n so h ne rla d f z y c nr la l d t I c nto e c n q n c mb n t t h to g p i t fte i tg a n u z o to pp i o a o e bo o ia e e t t n c n r ls se ,h v r o n h n e r l s t r to x itn n a c n e to a ilg c lf r n a i o to y tm t us o e c mi g t e i tg a au a in e ssi g i o v n i n l m o P D o to y tm n mp o i g t e s se sa i t n e p n e s e d Su h a c n r ls se c n k e I c nr ls se a d i r vn h y tm t bl y a d r s o s p e . c o to y t m a e p i
自适应系统中的智能控制算法设计与实现
自适应系统中的智能控制算法设计与实现随着智能化技术的不断发展,自适应系统越来越受到人们的关注与重视。
自适应系统是指能够对外部环境及其内部状态进行感知、调节和优化,从而实现自我适应、自我调节、自我修复等功能的一种系统。
而智能控制算法则是自适应系统必不可少的基础。
本文将主要介绍自适应系统中的智能控制算法设计与实现,从理论和实践两个方面进行探讨。
一、自适应系统中的智能控制算法自适应系统中的智能控制算法主要是指基于人工智能、模糊数学、神经网络等技术的控制算法。
这些算法与传统的控制算法相比,具有更强的适应性、鲁棒性和泛化能力。
常见的智能控制算法有模糊控制、神经网络控制、遗传算法控制等。
1. 模糊控制算法模糊控制算法是一种基于模糊数学理论的控制方法。
其主要思想是将控制对象的输入、输出和控制器的输出用模糊集合表示,通过模糊集合间的模糊关系进行控制。
模糊控制算法具有良好的适应性和鲁棒性,在模糊系统建模方面也有很好的应用。
2. 神经网络控制算法神经网络控制算法是一种基于神经网络理论的控制方法。
其主要思想是通过建立神经网络模型来实现对控制对象的非线性控制。
相比于传统控制算法,神经网络控制算法具有更强的非线性建模能力和适应性。
但是,神经网络控制算法需要大量的样本数据进行训练,且网络结构复杂,需要在实际应用中进行适当的优化。
3. 遗传算法控制算法遗传算法控制算法是一种基于进化算法的控制方法。
其主要思想是通过模拟生物进化过程来搜索控制器参数,从而达到优化控制的目的。
遗传算法控制算法具有很强的全局寻优能力,但需要进行适当的改进,以提高其收敛速度和搜索精度。
二、自适应系统中智能控制算法的实现自适应系统中智能控制算法的实现涉及到多个方面,包括控制器设计、参数优化、系统仿真和实际应用等。
以下将从这些方面进行介绍。
1. 控制器设计控制器设计是自适应系统中智能控制算法的第一步。
在这一阶段,需要对控制对象进行模型建模,并设计符合实际需求的控制器结构。
智能控制的应用

智能控制的基本概念
• 智能控制的定义一: 智能控制是由智能机器自主地实现其目标的过程。 而智能机器则定义为,在结构化或非结构化的,熟悉的或陌生的环境 中,自主地或与人交互地执行人类规定的任务的一种机器。 定义二: K.J.奥斯托罗姆则认为,把人类具有的直觉推理和试凑法 等智能加以形式化或机器模拟,并用于控制系统的分析与设计中,使 之在一定程度上实现控制系统的智能化,这就是智能控制。他还认为 自调节控制,自适应控制就是智能控制的低级体现 定义三: 智能控制是一类无需人的干预就能够自主地驱动智能机器 实现其目标的自动控制,也是用计算机模拟人类智能的一个重要领域。 定义四: 智能控制实际只是研究与模拟人类智能活动及其控制与信 息传递过程的规律,研制具有仿人智能的工程控制与信息处理系统的 一个新兴分支学科。
实例
• 华新水泥股份有限公司是水泥行业具有百年历史的龙头企 业,也是政府重点扶持的大型工业企业之一。在新的世纪, 公司坚持积极、稳妥、快速、高效的原则,以宏伟的气魄, 非凡的胆识,通过新建、扩建与并购等手段,实现了超常 规的扩张。在建设工期、工程质量、资金投入、项目管理 及设备国产化等方面均创造了国内最佳,为国内外行家所 高度赞赏,瑞士豪西蒙集团将其作为水泥项目工程建设的 典范向其它国家和地区推广。 • 华新水泥股份有限公司在国内乃至世界水泥生产企业中名 列前茅,在水泥生产过程控制系统中,运用的电气自动化 技术及相关系统产品的档次质量,特别是控制系统软件和 硬件配置方案及系统应用体现的能力和水平,体现了高度 的延续性和前瞻性。
主要特点
• 同时具有以知识表示的非数学广义模型和以数学模型表示 的混合过程,也往往是那些含有复杂性,不完全性,模糊 性或不确定性以及不存在已知算法的非数学过程,并以知 识进行推理,以启发引导求解过程; • 智能控制的核心在高层控制,即组织级; • 智能控制器具有非线性特性; • 智能控制具有变结构特点; • 智能控制器具有总体自寻优特性; • 智能控制系统应能满足多样性目标的高性能要求; • 智能控制是一门边缘交叉学科; • 智能控制是一个新兴的研究领域。
智能控制--模糊控制论文【范本模板】
华北电力大学科技学院智能控制论文模糊控制的概述及模糊控制的应用姓名:班级:学号:日期:模糊控制的概述及模糊控制在污水处理中的应用摘要:模糊控制技术对工业自动化的进程有着极大地推动作用,本文简要讲述了模糊控制的定义、特点、原理和应用,简介模糊控制在污水处理中的应用.并讲诉了模糊控制的发展.关键词:模糊控制;污水处理。
An overview of the fuzzy control and fuzzy control in application ofwastewater treatmentAbstract:Fuzzy control of industrial process automation has greatly promoted the role, the paper briefly describes the definition of fuzzy control,characteristics, principles and applications,Introduction to fuzzy control in wastewater treatment applications. And complaints about the development of fuzzy control.Keywords: fuzzy control;sewage treatment。
1 引言传统的自动控制控制器的综合设计都要建立在被控对象准确的数学模型(即传递函数模型或状态空间模型)的基础上,但是在实际中,很多系统的影响因素很多,油气混合过程、缸内燃烧过程等) ,很难找出精确的数学模型。
这种情况下,模糊控制的诞生就显得意义重大.因为模糊控制不用建立数学模型不需要预先知道过程精确的数学模型。
2 概述刘金琨在《智能控制》教材里提到模糊控制的定义和特点:2。
1定义:从广义上,可将模糊控制定义为:“以模糊集合理论、模糊语言变量及模糊推理为基础的一类控制方法”,或定义为:“采用模糊集合理论和模糊逻辑,并同传统的控制理论相结合,模拟人的思维方式,对难以建立数学模型的对象实施所谓一种控制方法"。
模糊控制在DC-DC变换器中的两种不同的应用介绍
模糊控制在DC/DC变换器中的两种不同的应用介绍
1 引言
有两种途径可以不利用线性系统理论。
一种是建立一种精确的非线性模型,但是,这种方法需要复杂的数学推导,经常导致复杂的控制算法,而不适合实际应用。
另一种方法是把人工智能的启发式推理规则用于学习控制系统,即智能控制,它不需要建立精确的数学模型,并且对于电路参数变化具有良好的鲁棒性。
2 智能控制
智能控制是控制理论发展的高级阶段,它的建立和发展是以众多新兴学科为基础的。
智能控制的基本出发点是仿人的智能实现对复杂不确定性系统进行有效的控制。
目前智能控制设计的途径有:
1)基于专家系统的专家智能控制;
2)基于模糊推理和计算的模糊控制;
3)基于人工神经网络的神经网络控制;
4)基于信息论,遗传算法和以上三种算法的集成型智能控制。
本文将重点讨论模糊控制,神经网络控制以及模糊神经网络控制在DC/DC变换器中的应用。
3 模糊控制在DC/DC变换器中的应用
模糊控制是应用模糊集合理论的控制方法,提供一种实现基于知识(规则)的,甚至语言描述的控制规律的新机理,例如:如果输出电压误差是正的,并且它的变化率是负的,那么轻微减少占空比等等。
所以,模糊控制设计方法比较简单。
虽然,相对于传统控制器,模糊控制通常不能提供更好的小信号响应,但是,它是基于启发式推理规则的,在非线性的DC/DC变换器中应用是非常容易的。
模糊控制的基本思想是基于专家经验和领域知识,总结出若干条以IF(条件)THEN(作用)形式表示的模糊控制规则,构成描述具有不确定性复杂对象的模糊关系,通过被控系。
PID控制与模糊PID控制

目录一、PID整定口诀 (2)二、PID控制与模糊控制比较 (3)三、PID控制方案 (4)四、模糊控制方案 (4)五、PID线性控温法 (4)六、PID控制理论 (5)七、模糊控制原理 (6)1.模糊控制系统的基本概念 (6)2.模糊控制系统的组成 (7)3.模糊控制的基本原理 (8)八、模糊PID复合控制算法 (9)1.模糊PID复合算法 (9)2.模糊PID算法运用 (10)九、MATLAB及其模糊逻辑工具箱和仿真环境 (14)1.模糊逻辑工具箱 (14)2.模糊PID的仿真 (15)3.仿真结果与分析 (19)4.结论 (20)十、基于Labview的模糊控制系统设计 (20)1.模糊控制系统的设计 (20)一、PID整定口诀参数整定找最佳,从小到大顺序查。
先是比例后积分,最后再把微分加。
曲线振荡很频繁,比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢,积分时间往下降。
曲线波动周期长,积分时间再加长。
曲线振荡频率快,先把微分降下来。
动差大来波动慢,微分时间应加长。
理想曲线两个波,前高后低四比一。
一看二调多分析,调节质量不会低。
(1)参数调整一般规则由各个参数的控制规律可知,比例P使反应变快,微分D使反应提前,积分I使反应滞后。
在一定范围内,P、D值越大,调节的效果越好。
1.在输出不振荡时,增大比例增益P。
2.在输出不振荡时,减小积分时间常数Ti。
3.在输出不振荡时,增大微分时间常数Td。
(2)PID控制器参数整定的方法1.理论计算整定法它主要是依据系统的数学模型,经过理论计算确定控制器参数。
这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
2.工程整定方法它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际终被广泛采用。
PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。
三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。
Simulink模糊控制教程

在20世纪70年代和80年代,模糊控制的理论框架逐渐形成,模糊 集合、模糊逻辑和模糊推理等基本概念得到深入研究和应用。
应用
随着计算机技术的发展,模糊控制的应用领域不断扩大,涉及工业控 制、智能家居、医疗等领域。
模糊控制的应用领域
01
工业控制
模糊控制在工业控制领域中得到了广泛应用,例如温度控制、压力控制、
最小值清晰化
将最小值推理得到的输出模糊集合映射到清晰输出上,通常采用中心平均法或 中心最大值法。
04
模糊控制系统的仿真与实 现
模糊控制系统的仿真
模糊逻辑工具箱
使用Simulink的模糊逻辑工具箱 进行模糊控制系统的仿真,可以 方便地创建模糊控制器并进行仿 真分析。
模糊化与去模糊化
在仿真过程中,需要将输入信号 模糊化,将输出信号去模糊化, 以模拟实际模糊控制器的行为。
使用这个工具箱,用户可以轻松地构建和测试各种类 型的模糊控制系统,包括单输入单输出(SISO)系统
和多输入多输出(MIMO)系统。
03
模糊控制器设计
模糊化方法
输入模糊化
将输入信号映射到对应的模糊集合上 ,通常采用三角形、梯形或任何可用 的形状来表示模糊集合。
输出模糊化
根据系统输出和期望输出的偏差,调 整模糊集合的中心和宽度,以实现输 出模糊化。
模糊控制在液位控制系统中的应用
总结词
液位控制系统要求精确控制液位高度,同时要考虑到液体的流动性和容器的形状等因素,模糊控制能够实现高精 度的液位控制。
详细描述
在液位控制系统中,模糊控制器可以根据液位传感器的实时数据和设定值,通过模糊逻辑推理快速调整进液或出 液阀门的开度,实现液位的精确控制。同时,模糊控制器还可以根据液体的物理特性和容器的大小等因素对液位 变化进行预测和控制。
浅谈自动控制在中央空调中的应用
浅谈自动控制在中央空调中的应用发布时间:2021-05-06T15:47:51.463Z 来源:《建筑实践》2021年第40卷第3期作者:刘成[导读] 随着市场经济的不断发展,人们对中央空调也提出了更高的要求。
刘成广州市住宅建筑设计院有限公司上海分公司 200335摘要:随着市场经济的不断发展,人们对中央空调也提出了更高的要求。
自动控制技术的出现以及在中央空调中的应用,实现了中央空调的高效化、安全化、节能化的高标准要求,显现了良好的发展前景。
因为各种自控技术自身也存在着不足,所以把不同的自控技术结合在一起,充分发挥PLC控制技术、神经网络控制和模糊控制等自控技术的优点,并应用在中央空调中,这才是以后中央空调自控系统的发展方向。
关键词:自动控制;中央空调;应用1. 中央空调系统的工作原理中央空调系统主要由制冷机组、冷却水循环系统、冷冻水循环系统、风机盘管系统和冷却塔所组成。
其工作原理为:制冷机组通过压缩机将制冷剂压缩成高压气态,经过冷凝器冷凝成液态后送蒸发器中与冷冻水进行热交换,将冷冻水制冷,冷冻泵将冷冻水送到各风机风口的冷却盘管中,由风机吹送达到降温的目的。
制冷剂在冷凝器中释放出热量成液态,冷却泵将冷却水送到冷却塔上由水塔风机对其进行喷淋冷却,与大气之间进行热交换,将热量散发到大气中去。
2. 自动控制在中央空调系统的重要性中央空调给人们提供了舒适的环境,但在带给人们舒适环境的同时,也存在着一些问题,传统的中央空调模块比较简单、耗电量大、效率低、安全性差等。
为了使中央空调能够高效化、节能化、稳定化地工作,将自动控制技术应用到中央空调系统中是十分重要的。
首先,自动控制技术可以提高中央空调系统的智能化水平。
可令其操作更为快捷、简单,不需要大量的人员长时间进行操作或监督管理,避免了人力和时间的浪费。
其次,自动控制技术也提高了中央空调系统的安全性。
比如高低压力保护装置、油压差控制器、温度传感器等控制元件,组态王、MCGSE组态环境等软件应用于中央空调监测系统中,实现了中央空调自动化、实时性监测,加强了空调系统运行的安全性,降低了事故发生的概率。
基于ARM的智能积分模糊控制器的研究

又 () 0 =0,由式() 2得
a() 一e x =1 一
其 中,k 为常数 。这样 ,给定 k 就可计算出 的论域伸 缩 因子 a()。下面确定论域伸缩 因子。 X
归一化处理后 ,a( ) k的关系如图 1 X与 所示 。由图可
由式( 3 )可知 , 差 e 偏 和偏差变o x 与
卜 ( E0 ( ) O ,a( ) , xE ] x 为偏差 X的连续 函数 ,即 a: E0 E0 _ 【, , - ( [ , ] ÷ 01 XI 一 1 - 4口 ( ) X的变化规则可 由式() 随 1给出: Aa=k x x 1 ) xA x x(一 () 1
糊控制器 的输 出增益 。
75
作者简介 :蒋恩松 (9 2 ) 17 - ,男 ,湖南永州人 ,湖 南
科技 学院讲 师 ,硕士 。研究方 向为计算机控制及信息处理 。
维普资讯
于是希望
为 了克服 上述积分 控制作用的缺点 ,引入仿人智 能积
2 当 、 )
和
都 存在 ,且 ≠
共同确定 , 但 应小于 和
在(,a、( ,c、及(,e等 区间上 ,取消积分作 用,有利 0 ) b ) d ) 于系统借助于惯性 向稳态过渡 。 这种积分作用较好地模拟 了 人的记忆特性及人控制 的策 略,它有选择地 “ 记忆”有用信 息 ,而 “ 忘”无用信 息,所以可 以很好地克服一般积分控 遗 制的缺点。所以在模糊控 制中引入仿人智能积分 , 既可 以克 服常规模糊控制器精 度较低 、 稳态误差较大 的缺点 , 又可以 克服常规积分环节的缺点 。 因此控制器的输 出,公 式表示如下 :
维普资讯
第2 卷 第8 9 期
20 年 8 08 月
仿生机器人的智能化控制技术在环境监测中的应用研究

仿生机器人的智能化控制技术在环境监测中的应用研究随着科技的不断进步,仿生机器人作为一种新型智能设备,其在环境监测领域的应用逐渐引起了人们的广泛关注。
本文将探讨仿生机器人的智能化控制技术在环境监测中的应用研究。
1. 智能化控制技术概述智能化控制技术是指通过集成传感器、处理器和执行器等设备,使机器人能够感知环境、做出决策并执行动作的技术。
这种技术的核心在于实现机器人的自主性和智能化,使其能够适应不同的环境和任务需求。
2. 仿生机器人在环境监测中的优势仿生机器人结合了生物学和工程学的原理,设计出具有生物特征和行为的机器人系统。
在环境监测中,仿生机器人具有以下优势:- 模仿生物感知:仿生机器人可以模仿生物的感知机制,如视觉、听觉、触觉等,从而实现对环境的感知和监测。
- 自适应能力强:仿生机器人能够根据环境的变化自主调整其行为和动作,具有较强的适应能力。
- 灵活性高:仿生机器人的结构和动作设计灵活多样,能够应对各种复杂环境条件下的监测任务。
3. 智能化控制技术在仿生机器人中的应用智能化控制技术在仿生机器人中起着关键作用,主要体现在以下几个方面:- 传感器技术:利用各类传感器实现对环境参数的感知,如温度、湿度、气体浓度等,为环境监测提供数据支持。
- 数据处理与决策:通过将传感器获取的数据进行处理和分析,实现对环境状态的识别和评估,并根据预设的规则或算法做出相应的决策。
- 运动控制技术:采用先进的运动控制算法和执行器,实现机器人在环境中的移动、定位和操作,完成监测任务。
4. 实例分析:水质监测仿生机器人以水质监测为例,设计一款仿生机器人系统,其主要功能是在水体中进行水质参数监测,如PH值、溶解氧浓度等。
该机器人系统采用智能化控制技术,具有自主巡航、数据采集和传输等功能。
通过传感器实时监测水质参数,利用数据处理和决策模块对水质情况进行评估,同时采用运动控制技术实现机器人在水中的灵活移动,从而实现对水质的全面监测和评估。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言
仿人 智 能控 制 ( SC) 模糊 控 制 ( U Z 都 HI 和 F Z Y)
是 智能控 制 的典 型 形式 , 具 有智 能 控制 的基本 特 都
外界 干扰影 响 的缺 点 逐 步显 现 , 它 的应 用也 受 到 使 了限制 。模糊 控制器 由于对误差 和误差 变化率 的模 糊 化 , 有 良好 的抗 随机干扰 能力 , 具 因此 该文将模 糊
p o e ft e d u l n e td p n u u s se ,i h ih ft e d u l n e d p n u um,mo e f r p  ̄y o h o be i v re e d l m y tm n t e lg to o b e iv  ̄e e d l h d lo
摘 要 : 出将模糊 控制 与仿人 智 能控 制相 融合 的模 糊 仿人 智 能控 制 技 术 , 提 引入 了模 糊切 换 , 给
出了模 糊仿人 智能控 制 器的基 本 结 构 和控 制 算 法。 分析 了二级 倒 立摆 系统 的 运 动特 性 , MA . 在 T
L B中进 行 了针 对二级 倒立摆 的模糊 仿人 智能控 制 系统 的建模 与仿真 。 A
关键 词 : 二级 倒 立摆 ; 模糊 仿人 智能控 制 ; 模糊 切换 ; 真 仿 中图分类号 :P 7 4 T 2 3 . 文献标 志码 : A 文章 编号 :0 0 0 8 (0 0 0 — 0 8 0 10 — 6 2 2 1 ) 6 0 5 — 3
Ana y i nd a lc to ff z y sm u a e n elg n o r ls r t g l zng a pp i a i n o u z i l t d i t l e tc nt o t a e y i
制任 务 。
仿 人 智能 控制 器 是 以人对 控 制对 象 的观 察 、 记 忆 、 策等智 能的 模仿 作 为基 础 , 据 被调 量 、 差 决 根 偏 以及偏差 的变化 趋势来 确定控 制策 略 。它 有 以下基
本特征 : ) 层 递 阶 的信 息 处理 和 决 策 机 构 ; ) 1分 2 在 线 的特征 辨识和 特征 记忆 ; ) 闭环 控制 结合 和定 3开 性决 策与定 量控 制结 合 的多 模态 控制 ; 启 发式 和 4) 直觉 推理 逻 辑 的 应用 。但 是 随 着 控 制 过 程 的 进
AbtatT i p pr rsnsafzys l e n lgn o t l r( SC ,w i oclt g s c: hs a e pee t z i a d itl et nr l F I ) r u mu t ei c oe hc i sua n hn i
f z y lgc wi uma i lt ne l e tc nr la d a f z y-s th i n r d c d he sr c u e a d u z o i t h h n smu ae it li n o to n u z g wic s i to u e .T tu t r n
Ke r : o b e i v  ̄e e d l m ;u z i l td i e l e tc n rl f zy-s th; i lto y wo ds d u l n e d p n u u f z y smu ae ntl g n o to ;u z wi i c smu ain
・
5 ・ 8
工 业 仪 表 与 自动 化装 置
2 1 第 6期 00年
模 糊 仿 人 智 能 控 制 器 的分 析 与 应 用 兰州理工 大 学 电 气工程 与信 息工程 学 院 , 兰州 7 0 5 ; 3 0 0 2 白银 市第九 中学 , . 甘肃 白银 7 0 1 ) 3 9 3
R n IZ e c e ,WEIJa u EN Big ,L h n h n iy n
( .colfEe ra n no tnE gne n ,azo nvrt o e nlg ,azo 30 0 C i 1 Sho ltcl dI r i nier g L nhuU i syf Tc ooyL nh u70 5 , hn o ci a f ma o i e i h a; 2 aynN . ihSho, as ayn7 0 1 , hn ) .B i o9Hg colG nuB ii 39 3 C ia i
f zy sm ua e n el e o to y t m se t b ih d a d smu ai g e p rme ti o e u e h i— u z i ltd i tli ntc n r ls se i sa l e n i ltn x e i n sd n nd r te cr g s e m sa e fM ATL u tn eo AB.
控 制和仿 人智 能控 制相 结 合 , 出 了一 种模 糊 仿 人 提
智 能控制 器 , 并应 用 于二级倒 立摆 系统 的控 制 中 , 取 得 了令人 满意 的效果 。
点, 即不依 赖 于对 象 的数 学模 型 , 对无 法建模 的复杂 对象, 也能 利用人 的 经验 知识 来 构 造控 制 器 完成 控