PPK动态后处理测量技术及精度分析
PPK辅助无人机摄影测量的精度分析

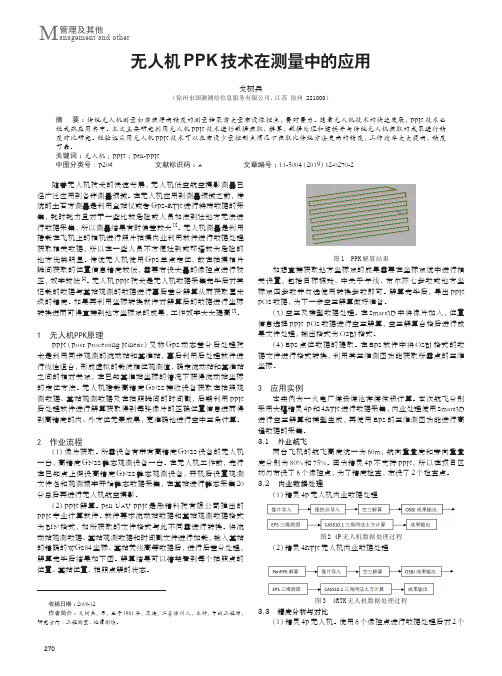
传统的摄影测量通过布设大量的野外控制点通过解 析空中三角形的方式来解算六个外方位元素。GNSS 在无 人机领域的应用使无人机通过搭载 GNSS 接收机可以获得 较高精度的时间信息与对应的无人机航线信息,即无人机 在某时刻的位置信息,从而获得航摄中心对应时刻的空间 位置信息,结合相机的曝光时间文件,最终得到相机在拍 摄照片时的航摄中心的(XS、YS、ZS)。GNSS 辅助无人机测图 通过提供高精度的(XS、YS、ZS)大大的增加了无人机测图的 数据冗余,从而大量的减少了外野像控点的数量。
2.2 PPK 辅助无人机测图流程 PPK 辅助无人机测图包括三个阶段准备阶段、航拍阶 段与成图阶段。 准备阶段根据测区与测图的要求完成航线的规划与 控制点的布设,最常见的像控点布置方案包括航带网法和 区域网点法,在保证测图精度的前提下,外业像控越少越 好[5]。 在航拍阶段,PPK 不需要基准站与流动站之间具有实 时的数据链通讯,因此 PPK 辅助无人机测图中基准站与测 区距离在 50km 范围内即可,但 PPK 的测量精度会受基准 站与无人机距离的影响,因此为保证基准站信号质量,要 求基准站与测区距离尽量小[6]。在起飞前还需要将设备进 行初始化,一般初始化时间为 8-10min,在航飞时应按照航 线规划要求进行,保证飞机正常工作[7]。 数据的处理与成图阶段是通过 PPK 事后差分获取本 次航摄的 POS 数据,通过无人机成图软件对获得的相片结 合相控文件以及 POS 数据进行制图,获得 4D 产品,并对成 图精度进行分析。
中图分类号院P258
文献标志码院A
文章编号院2095-2945渊2019冤29-0073-03
Abstract:In this paper, taking the aerial photography project in Xiuwen County, Guizhou Province as an example, the aerial photogrammetry is carried out using PPK technology to assist UAV photogrammetry, and the accuracy of POS data obtained by PPK difference is analyzed. Using PIX4D software combined with POS data to map processing, through DOM and DSM model, this paper extracts the coordinates and elevation of the checkpoint and compares them with the true value. The paper also talks about whether the PPK aided UAV map can meet the requirements of large-scale mapping when fewer image control points are used.
PPK动态后处理测量技术及精度分析
PPK 动态后处理测量技术及精度分析摘要:本论文探讨了测量技术中的一种PPK 动态后处理测量技术,其原理、流程、精度分析及效果等方面进行详细介绍。
PPK 相对于传统RTK 具有更高的精度和灵活性,能够在不可见星和遮挡较多的区域进行高精度测量。
在工程测绘中的应用也越来越多,能够满足各种场合的测量需求。
关键词:PPK 动态后处理;测量技术;精度分析Abstract:This paper discusses the PPK dynamic post-processing measurement technology in the measurement technology, its principle, process, accuracy analysis and effects. PPK has higher precision and flexibility than traditional RTK, and can perform high-precision measurements in areas with invisible stars and more obstructions. Itsapplication in engineering surveying is also increasing, which can meet various measurement needs in different occasions.Key Words: PPK Dynamic Post-Processing; Measurement Technology; Accuracy Analysis一、引言随着时代的变化和科技的发展,高精度测量技术的应用也越来越广泛。
传统的RTK 在实测时需要有足够的星座和没有大的遮挡,对海拔高差的测量也存在一些局限。
而PPK 动态后处理测量技术则是基于静态桩高精度测量中采样时间可以同时记录,对时间和空间的均衡进行优化,能够在受限制的环境中进行高精度测量。
PPK技术辅助无人机航空摄影测量精度分析

PPK技术辅助无人机航空摄影测量精度分析摘要:在科学技术不断发展的带动下,城市建设水平不断提升,特别是在进行城市规划的过程中,就需要对无人机摄影测量技术进行积极的运用,全面提升规划的合理性,为各项工作的顺利开展提供保障依据,推动可持续发展理念的有效推进。
目前,网络RTK技术受限于通信信号的强度,部分区域应用效果差。
基于此,以下对PPK技术辅助无人机航空摄影测量精度进行了探讨,以供参考。
关键词:PPK技术;无人机航空摄影测量;精度分析引言无人机是无人驾驶飞行器的简称,一般包括无人驾驶的固定无人翼机、多旋翼无人机和无人飞艇等。
近年来,随着航空摄影科学技术的不断发展,出现一种以无人机为载体携带数字航空摄影仪的新型测绘技术,即无人机航空摄影技术。
该技术的出现为很多领域内某些工作的开展带来了极大的方便,如在地质灾害应急救灾、城市规划、地理国情监测、地籍测图和工程测绘等方面发挥了积极作用。
1PPK技术的优势①可以与RTK、星站差分、单点定位同时进行。
②采用现有设备,不会增加额外成本。
③无论采用何种定位方式,最终提供的是拍摄瞬间相机位置的厘米级的坐标。
④RTK、星站差分浮动解或单点均可开展工作,不会影响到工作进度,提高生产效率。
⑤可完全采用单点定位的方式进行作业。
⑥PPK成果直接替换浮点解坐标或单点解坐标,无需复测。
⑦可不采用星站差分方式,节约星站差分信号服务费用。
2无人机航空摄影系统集成无人机航空摄影系统是以无人驾驶的固定翼、旋冀和飞艇等飞行器为飞行平台,搭载成像仪设备,获取地面信息的摄影测量方式。
无人机航空摄影系统一般由前期获取高精度航空影像数据的航空摄影部分(空中摄影和地面控制)和后期对影像数据处理的一系列过程(如利用航空摄影处理软件对图像的预处理,生成数字高程模型、数字正射影像图和地形图等产品)构成。
无人机载成像光谱仪技术具有强大的地物探测能力,具有光谱分辨率高的特点,能够进行探测地面目标和识别地物,可实现地物的精细分类。
浅谈城市地形测量中GPSPPK技术的应用

固定模 糊度 , 静态模 式下, 流动站坐标 作为非随机量 ; 动态模式下 , 流动 站坐标作为随机量, 采用 K l n滤波技术预估流动站状态参数 。 ama
如下 :
①基线处理, L O . 在 G7 0中导入基准站和流动站 数据 , 设置基 准点对 应 的点为参考站, 他碎部点为流动站 。设置卫星 高度角 1 ̄进行基线 其 5, 4 P K的工作 流程 方法 P 解算 , 保存得到固定解 的基线 , 对未得到 固定解 的基线根据残 差图, 编辑 41 基 准 站 的 架 设 . 卫星对 应的时间窗 口, 直到所有基线全 部得到固定解 , 有无法得到 固 若 在测区中把基准站架设在 已知 的控制点上 , 安置一 台 G S接收机进 定解的基线必须舍去, P 对应 的碎部点重测 。 图 1 图 2中可 以看出, 从 、 基准 行 静 态 测 量 , 据 记 录 时 间 间 隔 :s2 或 5 。 数 1、s s 站长 时间观测 , 记录数据 , 流动站观 测 l 5 , ~ s 基线解算 精度可 以到厘米
2 P K的精 密定位原 理 P
使用 C R O S系统在下午初始化时间长, 工 利用进 行同步观测 的一 台基准站接收机 和至少 一台流动接 收机对 系统进行碎部测量。作业期间, 改用 P K作业模 式。 P 卫星 的载波相位观 测量; 事后在计 算机 中进行线性组合 , 形成虚 拟的载 作不稳定 , 作业过程: 波相位观 测量 , 确定接 收机之间 的相对位 置; 引入基准 站 已知坐 标获得 () 1 在测 区中部选择一周 围无遮挡 的居 民楼 架设基准 站。设置观 测 流动站坐标系的定位方法。 模式为静态 , 采样率为 05 。 .s 3 P K的理论 基础 P () 2 设置另外 3台接收机观测模式为 静态, 采样率为 05 , .s采用边观 瑞 士 的 EFe 和 GB ulr 出了快速 计 算整 周末 知数 方法 (at .ri .et 提 e Fs 测边初始化的方式, 测量碎 部点, 直到 当天工作结束。 测量过程中联测测 A i t eo t nA poc) 接 收机 能够 区别静止时和运动 时的观测 mbg yR sl i p rah , u uo 区保存完好 的控制点 6个 。 量 ,并连续 纪录 ,保证 了采用 F R A A方 法确 定整周模糊度并保持下去 。 () 3 数据处理采用徕卡公 司的随机处理软件 L 70 基本处理过程 G0 .,
GPS.PPK技术在基础测绘像片控制测量中的应用

GPS.PPK技术在基础测绘像片控制测量中的应用摘要:在我国社会的进步与科学技术的不断发展下,各行各业都获得了极大的发展。
测绘技术也由原来的GPS-RTK以及网络GPS-RTK之后又出现了一种新的测绘技术,即动态测量数据后处理技术(GPS-PPK)。
GPS-PPK技术在RTK技术的基础上有着更加强大的功能,因而已经逐步得到应用。
文章主要介绍了GPS-PPK技术的工作原理并分析了测绘专业关于GPS-PPK技术教学应该注意的问题,然后阐述了GPS-PPK技术在基础测绘像片控制测量的具体应用。
关键词:GPS-PPK技术;基础测绘;控制测量;精确度;基准站GPS 技术凭借其全天候、高效率、低成本以及高精度等优点在现代社会得到广泛应用,尤其是在测绘领域。
将GPS技术应用到测绘工作中以后,不仅测绘工作者的劳动强度被大幅降低,测绘精度与工作效率也得到了提高。
而随着其不断的发展与进步,动态测量技术也逐渐成熟起来。
GPS-RTK以及GPS-网络RTK技术在测绘工作中的相继面世。
但是这两种技术在实际应用中需要以数据通讯作为基础,因此使用范围受到一定的限制。
动态测量数据后处理技术,也就是Post Processing Kine-matic(简称PPK)运用了快速求解整周模糊度的方法,因此不需要进行数据通讯就可以通过几个元观测值来得到三维坐标,且其精确度达到了厘米级。
在GPS-RTK技术受到区域限制时,GPS-PPK技术可以在原基础上进行补充作业。
1.GPS -PPK技术的工作原理分析该技术通过一台用于同步观测的基准站接收机以及数量至少为一台的流动接收机来完成观测工作。
基准站保持对GPS卫星的连续观测,而流动接收机则在初始化以后移动到每一个需要进行观测的点。
流动站与基准站之间所接收到的同步数据经过计算机的整合以后就会变成线性组合,形成虚拟的载波相位,以此来确定接收机之间的相对位置。
然后通过已知的基准站坐标来求解出流动站估测点的三维坐标。
TBC动态数据处理说明(PPK)

1. 打开TBC新建一个项目。
2. 导入基准站和移动站数据。
3. 在“导入文件”流动站文件下点击左边+号,选中点,右键菜单选择属性,然后在属性里点击菜单顶部的“强制连续”按钮。
跳出提示,点同意。
关闭属性。
4. 在菜单“测量”中点击处理基线。
处理完成后的结果见下图。
5.在"Sessions 时段"菜单下,选择轨迹,右键选择属性菜单,查看属性。
6.在属性里,“显示模式”可以分别选择“轨迹”“点”“矢量”,图像也会不同。
7.在菜单“文件”-“输出”中,选择测量标签页,选中“Trajectory(CSV)file exporter"。
在data 域里点击一下,然后选中左边的轨迹,设好文件名,路径,即可输出轨迹点。
补充:
如果不想将轨迹作为一个对象存储,在开始处理基线前可以在“项目设置”里修改。
Project Settings - Baseline Processing - General - Store continuous as trajectory 选择'No'。
在基线处理时就会将轨迹作为一个个独立的矢量来处理。
在矢量视图中可以看到矢量的一些信息,如精度等。
GPS PPK技术在像控点测量中的应用及精度分析

义。
关键 词 : 像控点 ; 测量 ; 精 度 中图 分 类号 : P 2 3 1 文 献标 识 码 : A
文 章 编号 : 1 0 0 2 — 5 0 6 5 ( 2 0 1 6 ) 2 4 - 0 1 6 2 — 2
GPS PKK t ec hn ol ogy i n t he app l i ca t i on o f l oc u s of c on t r ol me a su r e a n d pr e ci si on an al y si s
Ke y wo r d s : A s t h e l o c u s o f c o n t r o l ; Me a s u r e me n t ; p r e c i s i o n
随着信 息技 术的 不 断发 展 ,人们 对于 G P S技 术 的要 求 越 来越高 , 为 了满 足人们 日益增长 的需求 , GP S 技 术在不 断 地 完善 。由于 GP S 技 术据 有很多 的优 点 , 比如 : 精 度高 、 效
北斗PPK技术辅助无人机航空摄影测量精度分析张琳

北斗PPK技术辅助无人机航空摄影测量精度分析张琳发布时间:2023-05-14T16:33:18.482Z 来源:《中国科技信息》2023年5期作者:张琳[导读] 无人机航空摄影具有机动灵活、分辨率高、成本低等优点,是对卫星遥感和常规航空摄影的补充,在海洋测绘领域的应用越来越广泛。
GNSS可以提供24小时的定位、导航和时间同步服务,形成了GNSS辅助空中三角测量技术,并广泛应用于航空摄影的实际生产中。
使用安装在飞机上的GNSS接收机在曝光时确定航空摄影光学中心的三维坐标,并将其作为辅助观测纳入空中三角测量以进行应用,可以大大减少地面检查点的数量。
重庆工业职业技术学院渝北区 401120摘要:无人机航空摄影具有机动灵活、分辨率高、成本低等优点,是对卫星遥感和常规航空摄影的补充,在海洋测绘领域的应用越来越广泛。
GNSS可以提供24小时的定位、导航和时间同步服务,形成了GNSS辅助空中三角测量技术,并广泛应用于航空摄影的实际生产中。
使用安装在飞机上的GNSS接收机在曝光时确定航空摄影光学中心的三维坐标,并将其作为辅助观测纳入空中三角测量以进行应用,可以大大减少地面检查点的数量。
关键词:北斗三号;PPK;无人机;摄影测量;精度分析引言近年来,无人航空摄影测量技术以其低成本、高效率和高效率的优点,被广泛应用于各种测绘项目中。
它显著降低了测量人员和测绘人员的现场工作量和强度,所获得的测量结果的精度也可以满足大面积测绘的精度要求。
然而,由于地形、测量环境等因素的限制,一些测量区域(如高山、河流、危险源等)在无人机摄影测量过程中可能存在图像控制点放置不足或不均匀的情况,这可能直接导致测量结果的准确性降低。
如果这个问题不能得到有效解决,无人机空中摄影测量的应用将大大减少。
1航空摄影测量航空摄影一般采用无人机进行,根据拍摄方式,可分为垂直摄影和倾斜摄影。
垂直摄影测量是无人机上的垂直航空摄影,只能从垂直方向获取图像数据, 大多只能获取地物的俯视视图, 不能很好的获取地物的侧面信息,成果主要体现在 4D 产品上。
PPK
GPS PPK技术的应用PPK技术(post processing kinetic)动态后处理技术,是利用载波相位进行事后差分的GPS定位技术,其系统也是由基准站和流动站组成。
与RTK 实时载波相位差分定位技术既有共同点也有不同点,可以作为RTK技术的补充,其主要作业过程包括外业观测数据和内业数据处理。
RTK技术大家已经非常了解,优势自不必说,虽然作业距离远但总是有接收不到差分信号的时候,或者有的时候在山区测量移动站作业距离近,远了就没办法接收到差分信号,这就是RTK的弊端,差分信号是通过数据链传输,或多或少会受到环境因素的影响,这个时候我们就可以应用PPK技术进行测量,利用PPK技术不需要数据通讯,作业半径可以达到300公里以上,在RTK受到限制的区域也能利用GPS进行动态测量,是对RTK的一种重要补充作业方式。
PPK的工作原理利用进行同步观测的一台基准站接收机和至少一台流动接收机对卫星的载波相位观测量;事后在计算机中利用GPS处理软件进行线性组合,形成虚拟的载波相位观测量值,确定接收机之间厘米级的相对位置;然后进行坐标转换得到流动站在地方坐标系中的坐标。
使用南方S86GPS实现PPK技术工作流程。
南方GPS可以在进行RTK测量时同时实现PPK,这样就可以在我们RTK没有差分信号的时候应用PPK记录数据基准站设置:开机按P键----出现灵锐south gps 画面按F1------按P设置工作模式-----按F2选择基准站模式设置P键确认-----按F2选择修改P 键确认-----按F2选择记录数据P键确认—按F2选择是P键确认---按F2选择确认按P键确认主机继续开机移动站设置:同基准站一样,主要目的就是把记录数据选择为“是”。
架设仪器仍然和RTK架设一样,PPK技术只是作为辅助功能。
1.基准站的架设在测区中把基准站架设在已知点上,量取基准站仪器高,并且手动以基准站已知点发射,达到发射要求后启动发射差分信号并按照采样间隔1s 采集静态数据STH 文件存在主机内存里。
中海达PPK介绍

(1)PPK可以得到厘米级的测量成果,测点历时比 RTK作业缩短,提高了GPS作业效率。
(2)PPK不需要电台,彻底摆脱了电台传输距离的 限制,有效作业距离增大,在测区控制稀少的情 况下不需观测GPS静态控制即能布设图根控制,保 证作业进度。
(3)PPK仅需GPS主机和天线,携带方便。在不需 要现场得到点位坐标信息时采用PPK技术比采用 RTK技术更有利于外业作业,更有利于提高经济效 益。
9 解算全部基线
9 解算全部基线(平面图查看解算结果)
9 解算全部基线(在线地图查看点位)
10 导出解算成果
10 导出解算成果
PPK后处理软件界面
下拉菜单
工具栏
向导栏 窗口
状态显 示窗口
消息栏窗口
专注 | 专业 | 专家
感 谢!
PPK应用领域: 应用领域
电力测量
地形测量
道路勘测
像控点测量
水上测量
土地确权
RTK作业模式
1.单独PPK作业模式 2. RTK与PPK联合作业模式
PPK
1 建项目(新建项目名、设置坐标系统)
2 架设基站(勾选PPK设置基站发查分)
3 设置移动台(勾选PPK设置主机)
4 移动站锁定卫星30分钟后开始碎步测量
中海达PPK介绍
广州市中海达测绘仪器有限公司
中海达PPK
随时随地,想测就测!
即动态后处理技术,是利用载波相位进行事 后差分的GPS定位技术,其系统也是由基准站和流 动站组成。与RTK实时载波相位差分定位技术既有 共同点也有不同点,可以作为RTK技术的补充,其 主要作业过程包括外业观测数据和内业数据处理。
下载基站和移动站主机的PPK静态数据到电脑,将手簿的测量项目拷贝
4.测量形式PPK相关设置

PPK测量形式-激光测距仪
如果您有激光测距仪设备,请您选择相应的型号, 如果您有激光测距仪设备,请您选择相应的型号,并设 置正确的参数。 置正确的参数。
PPK测量形式-地形点
自动点间隔大小,测量一个点后点号自动累加的步长, 自动点间隔大小,测量一个点后点号自动累加的步长, 质量控制记录你所测量点的一些信息,自动存储点, 质量控制记录你所测量点的一些信息,自动存储点,点 测量后,坐标自动存储。 测量后,坐标自动存储。
PPK测量形式-基准站选项
基准站天线信息,包括类型、量高方式、 基准站天线信息,包括类型、量高方式、等信息必须正 确填写,与RTK设置一样,天线高选项为空,序列号可 确填写, 设置一样,天线高选项为空, 设置一样 以不填写
PPK测量形式-基准站选项
如果您使用4000系列接收机作为基准站,勾选此项, 系列接收机作为基准站,勾选此项, 如果您使用 系列接收机作为基准站 否则不必勾选
配置测量形式-PPK
配置PPK测量的测量形势,在配置-测量形式-PPK 测量的测量形势,在配置-测量形式- 配置 测量的测量形势
PPK测量形式
PPK测量形势如下多项,下面分别配置 测量形势如下多项, 测量形势如下多项
PPK测量形式-流动站选项
测量类型必须选择 后处理动态测量 可以选择;记录间隔, 记录设备 可以选择;记录间隔,可以调节
PPK测量形式-已观测控制点
已观测控制点是 我们进行观测的这个点是作为控制点 的,该点的要求比地形点的要求要严格很多
PPK测量形式-已观测控制点
除了精度上的限制外, 除了精度上的限制外,还要求时间上的限制
PPK测量形式- 后处理初始化时间
初始化时间,此项设置单频接收机进行开始 初始化时间,此项设置单频接收机进行开始PPK测量初 测量初 始化的时间, 始化的时间,卫星数不同时间不同
无人机ppk技术在测量中的应用
270管理及其他M anagement and other无人机PPK 技术在测量中的应用戈树兵(徐州市国测测绘信息服务有限公司,江苏 徐州 221000)摘 要:传统无人机测量如需获得高精度的测量结果需大量布设像控点,费时费力。
随着无人机技术的快速发展,PPK 技术已经成熟应用其中。
本文主要研究利用无人机PPK 技术进行数据获取、解算,数据处理和建模并与传统无人机获取的成果进行精度对比研究。
经验证采用无人机PPK 技术可以在布设少量控制点情况下获取比传统方法更高的精度,工作效率大大提高,精度可靠。
关键词:无人机;PPK ;Pen-PPK 中图分类号:P204 文献标识码:A 文章编号:11-5004(2019)12-0270-2收稿日期:2019-12作者简介:戈树兵,男,生于1981年,汉族,江苏徐州人,本科,中级工程师,研究方向:工程测量、地籍测绘。
随着无人机技术的快速发展,无人机低空航空摄影测量已经广泛应用到各种测量领域。
在无人机应用到测量领域之前,传统的土石方测量是利用全站仪或者GPS-RTK 进行特殊数据的采集,耗时耗力且对于一些比较危险或人员如法到达地方无法进行数据采集,所以测量结果有时偏差较大[1]。
无人机测量是利用搭载在飞机上的相机进行照片拍摄内业利用软件进行数据处理获取相关数据,所以在一些人员不方便达到或环境较为危险的地方优势明显。
传统无人机使用GPS 单点定位,故在拍摄相片瞬间获取的位置信息精度较低,需要布设大量的像控点进行校正,效率较低[2]。
无人机PPK 技术是无人机数据采集完毕后对其记载的数据与基站观测的数据进行事后差分解算从而获取厘米级的精度。
如果再利用坐标转换软件对解算后的数据进行坐标转换进而可得直接到地方坐标系的成果,工作效率大大提高[3]。
1 无人机PPK原理PPK (Post Processing Kinetic)又称GPS 动态差分后处理技术是利用同步观测的流动站和基准站,事后利用后处理软件进行线性组合,形成虚拟的载波相位观测值,确定流动站和基准站之间的相对关系,在已知基准站坐标的情况下获得流动站坐标的定位方法。
PPK辅助无人机摄影测量的精度分析

PPK 辅助无人机摄影测量的精度分析随着科技的发展,无人机摄影测量技术在地质、土地利用、城市规划、农业等领域得到广泛应用。
而在无人机摄影测量技术中,PPK 技术的出现被认为是一个重大进步,具有更高的精度和稳定性。
本文将对PPK辅助无人机摄影测量的精度进行分析,旨在探讨PPK 技术在无人机摄影测量中的优势和应用。
一、PPK 技术简介PPK(Post Processing Kinematics)指的是后处理运动学定位技术,它利用GPS 航拍时记录下的导航数据和大地坐标系下的地控点坐标,通过后处理软件来计算相机的精确位置和姿态,从而使测量结果更为准确。
相对于RTK(实时运动学定位)技术,PPK 技术不需要与地面的GPS 基站进行实时通讯,因此可以适应更广泛的环境,并且其精度也更高。
二、PPK 技术在无人机摄影测量中的应用在无人机摄影测量中,常用的定位方式有GPS 实时定位和GPS 后处理定位两种。
GPS 实时定位需要在地面设置GPS 基站,并且需要与无人机进行实时通讯,因此需要一定的技术和设备支持。
而PPK 技术在采集数据时只需要对数据进行记录,利用后处理软件对数据进行处理即可得到更精确的定位信息。
PPK 技术在无人机摄影测量中的应用具有以下优点:1.计算精度更高与GPS 实时定位相比,PPK 技术在定位精度方面更为准确,平均精度可以达到厘米级别,能够满足精细测量的需求。
2.容易操作PPK 技术对操作人员要求较低,只需要在航拍时进行记录即可,不需要进行实时通讯和在地面设置GPS 基站,因此操作更为简便。
3.更加稳定PPK 技术可以实现离线定位处理,因此可以避免GPS 信号不稳定、影响测量精度的因素。
同时由于不需要进行实时通讯,也可以避免通讯不稳定造成的影响。
三、PPK 技术在无人机摄影测量中的精度分析1.数据采集首先,我们需要对拍摄区域内的地面控制点进行测量和标记。
在飞行过程中,可以通过无人机搭载的GPS 模块自动记录飞行轨迹,并与地控点的大地坐标系进行对比,得出相机的精确位置和姿态信息。
海洋测绘定位技术ppk操作流程

海洋测绘定位技术ppk操作流程英文回答:PPK (Post-Processed Kinematic) is a technique used in marine surveying and positioning to improve the accuracy of GPS data collected in the field. It involves collecting raw GPS data from a base station and a rover unit, and then post-processing the data to determine accurate positionsfor the rover unit.The PPK process typically involves the following steps:1. Setting up the base station: The base station is typically placed at a known location on the survey vessel or on a stable ground station. It needs to have a clear view of the sky to receive GPS signals. The base station is configured to collect raw GPS data at a high frequency, usually 1 Hz or higher.2. Collecting data with the rover unit: The rover unitis carried by a surveyor or attached to a survey vessel. It also needs to have a clear view of the sky to receive GPS signals. The rover unit is configured to collect raw GPS data at the same frequency as the base station.3. Post-processing the data: After the survey is completed, the raw GPS data from both the base station and the rover unit is downloaded to a computer. Post-processing software, such as RTKLIB or Trimble Business Center, is used to process the data.4. Data alignment: The raw data from the base station and the rover unit needs to be aligned in time. This is usually done by comparing the timestamps of the data.5. Differential correction: The post-processing software calculates the differential corrections by comparing the raw data from the base station with the raw data from the rover unit. The differential corrections are then applied to the rover unit's data to improve its accuracy.6. Position calculation: The post-processing software uses the corrected data to calculate the accurate positions of the rover unit at each point in time. These positions are typically expressed in latitude, longitude, and height above the ellipsoid.7. Quality control: The post-processed positions are checked for accuracy and consistency. Any outliers orerrors are identified and corrected if possible.8. Data export: The final post-processed positions can be exported in various formats, such as CSV or shapefile, for further analysis or integration with other survey data.中文回答:PPK(后处理动态定位)是一种用于海洋测绘和定位的技术,用于提高在现场收集的GPS数据的准确性。
PPK辅助无人机摄影测量的精度分析

PPK辅助无人机摄影测量的精度分析摘要:近年来,经济的发展,促进我国科技水平的提升。
随着无人机技术的飞速发展,其已成为主要的遥感技术之一,无人机航空摄影技术已应用到国民经济的各个领域。
无人机遥感平台作业方式灵活,成本低,便于携带;但由于无人机携带的是非量测相机,且飞行不稳定,生成的影像畸变差较大,在后续处理中需布设较多的控制点来提高精度,加大了工作量。
而无人机PPK技术能在保证成果精度的同时大大减少野外布设工作。
本文就PPK辅助无人机摄影测量的精度展开探讨。
关键词:PPK事后差分;无人机测图;大比例尺;GNSS引言无人机摄影测量中常用的定位技术包括实时动态差分(RTK)和事后动态差分(PPK),两种差分方式原理不同但精度基本一致,由于无人机测图中POS数据的实时采集几乎没有实际意义,PPK技术在无人机测图中的优势逐渐显现,PPK辅助无人机摄影测量的测图方式也变得越来越常见,PPK技术将会逐渐成为无人机测图领域的主要定位技术。
1无人机航测数据处理原理无人机航测数据处理是在传统航测数据处理理论上优化的结果,航测数据处理的目的是将零散的航片拼成正射影像图,并将其置于控制网之中,主要有两个步骤。
首先通过内方位元素将航片拼接起来,其次通过外方位元素将航片坐标转换为控制坐标,总结来说就是内定向和外定向两步。
这两步无论是无人机航测还是传统航测都是数据处理的基本原理,而无人机航测是根据数码相片栅格数据的特点在算法上进行了优化,算法核心为光束法空中三角测量,该算法可实现自动内定向,提高航片解析效率。
光束法空中三角测量是以航片拍摄时目标点、像位点和摄站点三点共线的条件所建立的空间光线作为整体平差运算中基本单元的空中三角测量。
通过各个空间光线的旋转和平移,首先使模型之间公共点的光线实现最佳的交汇实现内定向,其次将整个区域最佳地纳入到控制坐标系统中实现外定向,最终获得数据处理成果。
理论上目标点、像位点和摄站点三点位置坐标的精度直接决定了数据处理的精度,如相邻影像公共交会点坐标应相等,但是实际会存在不同程度的误差,因此,获取高精度的位置信息是提高内业处理精度的关键。
深扒GPSPPK测量技术,如何作业并解算?

深扒GPSPPK测量技术,如何作业并解算?PPK(postprocessed kinematic)测量技术是利用载波相位进行事后差分的GNSS定位技术,属于动态后处理测量技术,该技术采用动态初始化OTF(On The Flying)可快速解算整周模糊度,外业测量时观测10s至30s就可以解算出厘米级的空间三维坐标,与RTK实时载波相位差分测量技术不同,PPK测量时在移动站和基准站之间不需要建立实时通讯链接,而是在外业观测结束以后,对移动站与基准站GNSS接收机所采集的原始观测数据进行事后处理,从而计算出流动站的三维坐标。
PPK测量技术与RTK实时载波相位差分定位技术既有共同点也有不同点。
PPK系统也是由基准站和移动站组成,但测量主要由外业观测和内业数据处理组成。
正常RTK测量时,基准站和移动站之间差分数据传输需要通过数据链来传输,数据链传输一般是通过电台和网络的方式。
但是在一些山区或者网络网络信号不好的地方,就没有办法接收到差分信号,从而影响RTK作业效率。
这个时候PPK测量技术就可以很好的胜任,PPK测量不需要数据通讯,作业半径可以达到70-80公里以上。
在RTK受到限制的区域也能利用GPS进行动态测量,是RTK测量的重要补充方式。
基准站也可以是CORS系统,移动站只要在CORS系统有效覆盖范围内即可进行PPK作业并解算。
作业操作01架设基准站把基站架设在控制点上,调成静态模式,接着整平对中,并且量取仪器高度。
做好前面的工作后开始静态测量。
02移动站操作打开移动站接收机,进入工程之星软件主菜单,点击“测量”——“PPK测量”。
输入点名/杆高/采集时间(建议最少30秒),打开记录原始数据,点击“开始”,采集30秒后点击“保存”,之后前往下一点测量.......03数据导出1)拷贝基站和移动站静态数据。
2)在工程之星里导出移动站RTK文件,拷贝手簙SOUTHGNSS_EGSTAR-ProjectDate下对应的******.ppk和******.sys文件。
4.测量形式PPK相关设置

PPK测量形式- 后处理初始化时间
初始化时间,此项设置双频接收机采用OTF初始化,进 行开始PPK测量初始化的时间,卫星数不同时间不同
PPK测量形式-重复点限差
这两项设置均为0。
PPK测量形式
PPK测量形式配置成功后,必须点击“存储”,否则不 能生效
北京麦格天宝科技发展有限公司 技术部
关于PPK测量
PPK测量的优点: 不需要电台,可以不受电台传输距离的影响,所以相对 于RTK来说距离可以稍远些 无需过多的等待,初始化后就可以工作
PPK测量的缺点: 1、由于不能即时获得点位的测量精度,不能在现场进 行评估 2、不能够进行放样操作 3、作业过程中卫星不能失锁
配置测量形式-PPK
配置PPK测量的测量形势,在配置-测量形式-PPK
PPK测量形式-已观测控制点
除了精度上的限制外,还要求时间上的限制
PPK测量形式- 后处理初始化时间
初始化时间,此项设置单频接收机进行开始PPK测量初 始化的时间,卫星数不同时间不同
PPK测量形式- 后处理初始化时间
初始化时间,此项设置双频接收机进行开始PPK测量初 始化的时间,卫星数不同时间不同
北京麦格天宝科技发展有限公司
TSC2
关于PPK测量
PPK测量为后处理动态测量,其工作原理是先存储原始 观测值,以后再处理它们。 当使用这种测量类型时,默认记录间隔是5秒。如果接 收机能够存储数据,则第一次使用该测量形式时,形式 向导会提醒您指定希望存储数据的位置。 测量点之前,用以下一种方法对测量进行初始化: 已知点 运动中初始化(OTF) 对其进行配置成功后我们才能进行作业
PPK测量形式
PPK测量形势如下多项,下面分别配置
PPK测量形式-流动站选项
GPS-PPK技术在基础测绘像片控制测量中的应用

GPS-PPK技术在基础测绘像片控制测量中的应用摘要:我国社会科技进步非常迅速,各行业的发展也取得了长足的进步。
在原来GPS-RTK以及网络GPS-RTK技术之外,一种新的测绘技术也就是动态测量数据后处理技术(GPS-PPK)已经出现。
相比较GPS-RTK技术而言,GPS-PPK技术拥有更为强大的功能,逐渐得到了比较广泛的应用。
本文针对GPS-PPK技术的工作原理进行了重点介绍,同时就测绘专业关于GPS-PPK技术教学当中应该注意的一些问题进行了较为全面的分析,除此之外,还就基础测绘像片控制测量当中GPS-PPK技术的具体应用进行了阐述,为该领域提供具体的理论参考。
关键词:GPS-PPK技术;基础测绘;控制测量;精确度;基准站高精度、低成本、高效率、全天候是GPS技术的明显优点,因此在现代社会特别是在测绘领域得到了非常广泛的应用。
测绘工作中应用GPS技术能够有效提高测绘精度和工作效率,大幅度降低测绘工作者的劳动强度,同时对测绘数据有很好的保障。
随着GPS技术的不断进步和发展,动态测量技术也因此而变得越来越成熟,GPS-RTK和GPS-网络RTK相继出现,并且在测绘工作中逐渐得到了广泛应用。
GPS-RTK和GPS-网络RTK的应用,需要用数据通讯作为基础,所以在适用范围方面具有较大的局限性。
Post Processing Kine-matic(简称PPK),也就是动态测量数据后处理技术,能够回避上述两种技术的局限,它可以通过几个元观测值确定三维坐标,不用进行数据通讯,而且能够将坐标精确度控制在厘米级范围。
因此,GPS-RTK技术受到区域限制的时候,GPS- PPK技术可以很好地解决问题,在原有基础上就能够有效进行补充作业。
一、GPS-PPK 技术的工作原理分析GPS- PPK技术通过数量至少为一台的流动接收机和一台用于同步观测的基准站接收机,一起完成观测工作。
流动接收机会在初始化后,在不同的观测点之间移动,以便于接收数据;基准站保持对GPS卫星的连续观测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2019年4月第2期城市勘测Urban Geotechnical Investigation &SurveyingApr.2019No.2引文格式:王智,曹庆磊,张洪德等.PPK 动态后处理测量技术及精度分析[J ].城市勘测,2019(2):97-100.文章编号:1672-8262(2019)02-97-04中图分类号:P228文献标识码:APPK 动态后处理测量技术及精度分析王智1,2*,曹庆磊1,张洪德1,胡玉祥1,2,孟庆年1*收稿日期:2018—09—06作者简介:王智(1986—),男,硕士,工程师,注册测绘师,主要从事精密工程测量、工业测量和数据处理等技术工作。
(1.青岛市勘察测绘研究院,山东青岛266032; 2.青岛市西海岸基础地理信息中心有限公司,山东青岛266000)摘要:PPK 测量技术属于GNSS 动态后处理测量技术,其外业测量时不需要在流动站和基准站之间建立实时的通讯链接,作业半径大,在流动站上进行短时间的观测即可解算出厘米级的精度,介绍了PPK 测量作业模式及数据处理过程,对PPK 作业的局限性、提高测量精度的方法进行了探讨,并通过实地测试分析了PPK 作业过程中测量时间长度、流动站与基准站的距离等因素变化对测量精度的影响,验证了在60km 作业范围内,PPK 后处理差分定位精度可达到2cm 3cm 。
关键词:PPK ;GNSS 测量;基线解算;RTK ;差分定位1引言PPK (post processed kinematic )测量技术是利用载波相位进行事后差分的GNSS 定位技术,属于动态后处理测量技术,该技术采用动态初始化OTF (On The Flying )可快速解算整周模糊度[1],外业测量时观测10s 30s 就可以解算出厘米级的空间三维坐标[2],与RTK 实时载波相位差分测量技术不同,PPK 测量时在流动站和基准站之间不需要建立实时通讯链接[3],而是在外业观测结束以后,对流动站与基准站GNSS 接收机所采集的原始观测数据进行事后处理,从而计算出流动站的三维坐标[4]。
PPK 测量技术的工作原理是,在一定的有效距离范围内,在测量工作区适当位置处架设一台或者多台基准站接收机,再使用至少一台GNSS 接收机作为流动站在作业区域进行测绘,由于同步观测的流动站和基准站的卫星钟差等各类误差具有较强的空间相关性,外业观测结束以后在计算机中利用GNSS 处理软件进行差分处理,进行线性组合,并形成虚拟的载波相位观测值,计算出流动站和基准站接收机之间的空间相对位置[5];然后在软件里固定基准站的已知坐标,即可解算出流动站待测点的坐标。
作业过程中基准站GNSS 接收机保持连续观测,流动站GNSS 接收机先进行初始化,再依次在每个待测点上进行一定时间的观测,为了将整周模糊度传递至待测点,流动站接收机迁站过程中需要对卫星进行持续跟踪[6],基准站也可以是CORS 系统,即流动站只要在CORS 系统有效覆盖范围内即可进行PPK 作业并解算。
2PPK 作业方法及数据处理目前天宝等主流品牌GNSS 接收机都具有PPK 作业功能[7],下面以天宝R10GNSS 接收机及后处理软件TBC 介绍PPK 作业模式的设置、作业方法及数据处理过程。
2.1PPK 测量模式设置及外业过程在R10接收机手簿主界面“设置”里的“测量形式”中新建一个类型为“GNSS ”的测量形式。
然后分别在流动站选项和基准站选项里进行设置。
基准站选项和流动站选项里的测量类型均选择“后处理动态测量”,天线类型选择“R10Internal ”,测量到“快释接头底部”,由于基准站一直保持接收卫星信号的状态,其记录设备可选择“接收机”,记录间隔根据工程需要可选择1s 或5s ,流动站由于要在不同的待测点上进行观测,为了方便输入点号等操作,流动站记录设备可选择“控制器”,即将数据记录在手簿里,截止高度角输入13ʎ。
外业作业过程如图1所示:图1PPK 外业作业流程城市勘测2019年4月基准站接收机采样率一般设置为1s或5s,流动站初始化时间建议设置为5min 15min,天宝R10接收机默认的初始化时间为8min,在每个待测点上观测5s 15s,若在作业过程中流动站接收机因倾斜、关机或者遮挡出现卫星失锁的情况,则需要重新初始化。
在每个待测点上一般观测10s 30s即可,为得到更可靠的测量精度,应将GNSS接收机头安放在基座内,并采用三脚架进行精确对中,严格整平。
为确保测量结果的准确性,应在测区就近检核已有控制点。
2.2PPK测量数据处理TBC(Trimble Business Center的简称)是Trimble的最新数据处理软件,该软件不仅能够对GNSS测量数据进行处理,也可以对水准仪、全站仪以及三维激光扫描仪的测量数据进行处理。
TBC能够高效解算静态基线,其处理速度是TGO软件的10倍以上,对GPS L1/L2/L5以及GLONASS的数据均能进行解算,用户可以对起算点和起算边进行自定义,并将GNSS数据与全站仪、电子水准仪数据进行联合平差计算。
处理PPK测量数据时,应先在TBC坐标系统管理器里建立测量工程对应的坐标系统,并设置相应参数,具体包括建立参考椭球、基准转换模型、似大地水准面模型、投影参数等等[8]。
建立坐标系统后,在TBC软件主界面分别导入流动站接收机和基准站接收机的观测数据,数据格式可以是天宝GNSS接收机原始数据格式Dat或TO2等格式,也可以是Rinex等标准格式,输入基准站在当前坐标系下的坐标,并设为固定基准,然后进行基线处理,便可解算出各个流动站观测点的空间三维成果。
当基线处理精度较差时,应对基线进行精化处理,如在基线时段编辑器里删掉质量较差的观测时间段,或改进电离层、对流层改正模型,并再次进行基线处理,直至获取符合精度要求的解算结果。
2.3作业模式改进为提高测量精度并增加多余观测便于检核,PPK 测量作业时可设置多个基准站,在测绘作业区域适当位置处架设多台基准站接收机同步观测卫星数据,流动站在基准站控制范围内进行作业,依次对各个待测点进行数据采集,这样即可有效改善作业方法,提高测量精度和可靠性;或联测测区周边的CORS站,这样不需要在测区架设基准站,仅用一台流动站GNSS接收机即可完成作业,其作业原理和多基站作业模式相同,也可以在测区架设多台基准站,并同步联测一个或多个CORS数据,这样可大大增加多余观测,有效增加检核,提高作业精度。
数据处理时,在TBC里分别导入多个基准站或CORS站以及流动站的观测数据,为提高解算精度,可下载同步IGS等精密星历导入TBC里参与基线解算,基线解算合格后在TBC里固定多个起算点坐标进行网平差即可获取各个流动站的坐标,也可在TBC里导出Asc等格式基线文件,并导入科傻等第三方平差软件进行计算。
3测量精度影响因素为验证PPK的测量精度以及与测量时间、距离的影响,在青岛市地铁控制网中的控制点进行检测,在某楼顶已知高等级控制点上架设基准站,流动站共在10个控制点上进行了检测,基准站与流动站采样率均设置为5s,将控制点的已知成果作为真值比较分析PPK 测量的精度。
3.1测量时间对精度的影响流动站在每个控制点均进行了不同时间长度的观测,时间长度依次为5s、15s、30s、60s、300s等不同长度,表1为在控制点GPS109上进行不同时间长度观测对应的水平精度和垂直精度统计表。
PPK测量时间与观测精度统计表表1点号与基准站距离/m观测时长/s水平精度(95%)/m垂直精度(95%)/m GPS1091470100.0100.020200.0100.019300.0090.018600.0080.0171850.0070.0143000.0060.012从表1可以看出,当观测时间逐渐增加,PPK测量的水平精度和垂直精度也随之提高,PPK观测300s 时的精度相对于观测10s时的精度提高了约一倍。
从精度增加的速度看,长时间的PPK观测并不能带来测量精度的显著提高。
对流动站在GPS109上进行不同时间长度的观测,将其解算结果与真值进行比较,分析其X坐标较差、Y坐标较差以及距离较差的变化趋势,结果如图2所示;对流动站在各个点上进行不同长度时间测量的解算结果与真值进行距离较差对比分析,选取其中4个点,对比结果如图3所示,图中每条折线代表一个控制点的变化,其中最远的一个点距离基准站59.7km。
从图2和图3可以看出,随着PPK观测时间的增加,解算结果与真值较差大小的变化并无明显规律,但有逐渐收敛稳定的趋势,距基准站约1.5km的范围与真值坐标较差在12mm之内,距离基准站约60km的范围与真值较差在30mm之内。
89第2期王智等.PPK动态后处理测量技术及精度分析图2GPS109测量时间与真值较差分析图图3PPK 测量时间与真值距离较差趋势图3.2流动站与基准站的距离对精度的影响由于在流动站接收机和基准站接收机之间不需要建立通讯链接,PPK 测量的作业半径要比RTK 测量要大,测试中最近的点位距离基准站为1.47km ,最远的点位距离基准站为59.72km ,对各点观测30s 时的精度进行分析,水平精度和垂直精度统计图如图4所示:图4PPK 测量精度与距离关系图从图4可以看出,在观测同样时间长度下,随着与基准站距离的增加,PPK 的观测水平精度和垂直精度随之降低,精度降低的速度与距离增加的程度大致呈线性趋势,对外业观测的数据用TBC 进行解算,并将解算结果与真值进行对比,较差分析结果如图5所示:图5PPK 测量解算结果较差与距离关系图由图5可以看出,随着与基准站距离的增加,PPK 测量解算结果与真值的较差呈现不规则的波动,并没有明显的变化趋势,但在60km 范围,与真值较差在2cm 3cm 之内。
作业时观测环境与信号质量的差异也会对PPK 作业产生显著影响,进行基准站选择时,应远离发射塔、高楼等遮挡物,保证足够的卫星高度角,并远离大面积水域,防止多路径效应、电磁波的干扰以及卫星信号被遮挡和反射。
综上分析,随着PPK 观测时间长度的增加,测量精度会逐步提高,但提高的程度并不显著,测量结果也随着时间的增加由无规则变化趋于稳定;随着与基准站距离的增加,PPK 测量精度会逐步降低,但在60km 范围内测量结果并没有明显变化,其精度完全满足常规城市测量工作的需要。
4结语(1)PPK 测量技术无须在流动站与基准站接收机之间建立实时的通讯链接,因此其测量作业半径更大,观测更为灵活,各个流动站之间点位误差互不传递、不累积,其外业作业模式与RTK 相似,数据处理方法与静态测量基本相同,定位精度高。
作业时可通过多基站或联测CORS 、加入精密星历参与解算等方法来提高测量精度、确保测量成果的可靠性。