机载大斜视雷达成像算法研究
机载合成孔径雷达大斜视高分辨率重叠子孔径成像算法研究
机 载合 成孑径 雷达大斜视高分辨率重叠子孑 径成像算法研 究 L L
李
摘 要
勇
朱岱 寅
朱 兆达
( 南京航 空航 天大学信息科学与技 术学院 南京 2 0 11 10 6
该文提 出了一种结合 图像 二维几何失真校正和 空变相 位误差补偿的大斜视 、高分辨率机载合成孔径 雷达
重 叠 子 孔 径 成 像 处 理 方 法 。其 运 动补 偿 过 程 不 需 要 实 时 调 整雷 达 参 数 ,易 于 工 程 实现 。整 个 成 像 处 理 过 程 融 合 了
基于频谱分析 的分步变换技术 ,以线 性距离多普勒算法 生成 子孔径图像为前提 ,根据 转台成像的基外= 原理 ,通 过 固定参考 系下 地理坐标 的变 换和定位,实现 了不 同子 孔径图像之间散射 点的距离和 多普勒对准 ,并有效地补 偿 了 空变剩余相位误差 。点 目标 仿真 和实测 数据 成像结果证 明了该处理方法 的有效性 。
rt igo jc i gn , eh d l yi dv lpdt el eternea dD p l l n n ftecr so dn oa n ・bet ma i am to oo s e e e orai ag n o pe ai meto or p n ig t g g o z h r g h e
s at r r n s c e sv u i g s b h e g a h c l o r ia e t n f r n n o i o i g wh l t e se r n f r c t e s i u c s ie s b ma e y t e g o r p i a c o d n t r so mi g a d p st n n , i h t p ta s o m e a i e tc n q e b s d o P e h i u a e n S ECAN s e ly d t b an t e h g —e o u i n i g . e p i t a g tsmu a in n ie d t i mp o e o o t i h i h rs lt ma e Th o n — r e i lt sa d l a a o t o v p o e sn e ut h w ev l i f h r p s da p o c . r c s i g r s l s o t a i t o ep o o e p r a h s h dy t
机动平台SAR大斜视成像算法研究

机动平台SAR大斜视成像算法研究机动平台SAR大斜视成像算法研究摘要:机动平台SAR大斜视成像算法是合成孔径雷达(Synthetic Aperture Radar,SAR)成像的重要研究方向之一。
本文通过对机动平台SAR大斜视成像算法的研究,分析了其在目标检测、目标识别以及图像质量评价等方面的应用,并探讨了该算法在实际应用中的挑战和未来的发展方向。
一、引言合成孔径雷达SAR成像技术已经在军事、民用等领域得到广泛应用。
传统SAR系统通常是通过飞机、卫星等运载工具进行成像,且其成像区域通常是以前进方向为主。
然而,由于大多数目标存在多个视角,传统SAR系统往往无法充分获取目标的信息,特别是对于侧面观察较多的情况。
因此,机动平台SAR大斜视成像算法的研究具有重要意义。
二、机动平台SAR大斜视成像算法研究进展机动平台SAR大斜视成像算法的研究主要包括多通道SAR图像配准、运动补偿、散射中心估计和图像重建等关键技术。
在多通道SAR图像配准方面,目前常用的方法有基于相位相关、基于多核函数和基于相位同步等。
在运动补偿方面,主要涉及动目标的运动轨迹估计和运动补偿模型的建立与优化。
在散射中心估计方面,通常采用的是基于传统半径搜索法和基于改进半径搜索法。
在图像重建方面,目前广泛应用的有基于费舍尔信息标准和基于波前传输函数的重建算法。
三、机动平台SAR大斜视成像算法的应用机动平台SAR大斜视成像算法在目标检测、目标识别以及图像质量评价等方面具有广泛的应用。
在目标检测方面,该算法能够克服传统SAR系统难以检测到侧面目标的问题,可以有效提高目标检测的精度和灵敏度。
在目标识别方面,机动平台SAR大斜视成像算法能够提供更多的角度信息,从而更好地识别目标并进行分类。
在图像质量评价方面,该算法能够通过重建图像的质量指标来评估成像的效果,为算法的优化提供参考。
四、机动平台SAR大斜视成像算法的挑战和未来发展方向在实际应用中,机动平台SAR大斜视成像算法还面临一些挑战。
斜视模式机载合成孔径雷达处理原理以及应用
斜视模式机载合成孔径雷达处理原理以及应用合成孔径雷达(Synthetic Aperture Radar,SAR)基本原理是很简单的,就是合成孔径雷达和需要观察的目标物体之间有一定的相对运动关系,然后将这种相对运动关系合成一个范围比较大的雷达孔径来实现成像的目的,当然,这也是有要求的,成像必须在方位向有较高的分辨率,目前的研究方向也是如何在方位向上获得更高的分辨率。
标签:合成孔径雷达;分辨率;系统1 斜视机载雷达成象原理以及相关计算雷达的历史,特别是早期历史富有传奇色彩。
当Budrieri、Burns、Swords 等人写好一批优秀的论文之后,雷达的历史就随之开始了。
在1886年Heinrich Hertz证实了无线电波的传播。
1904年德国的杜塞尔布市的Huelsmeyer获得了第一个雷达的专利。
Huelsmeyer称他的发明为“发射、接收赫兹波的装置,如在波的投射方向上存在金属物体如舰船、火车等,该装置可以示警”。
1922年Tayler 和Young在华盛顿的海军实验室完成了第一部舰船探测雷达。
1922年Hyland制作了第一部飞机探测器。
在1941年美国陆军的雷达发现了接近珍珠港的日军机群,但当值的军官认为那是假目标。
二战期间,英国的Chain Home雷达系统的快速发展,对于英国成功的防御德军的空袭起了很重要的作用。
战后,雷达更是飞速发展,人们制造出了各种类型的雷达一直延用至今[1]。
合成孔径可以比喻成蜻蜓的复眼,是同时多通道感知不同方位的信息,再经过算法算出高分辨率图像的。
而相控雷达实际任意时刻一般只有多点或一点被扫描,相对合成孔径雷达速度上会有差异,如果是在移动中去扫描别的大量的目标就会出现距离方位的误差增大或丢失目标的问题。
所以飞机遥感测地雷达一般用合成孔径。
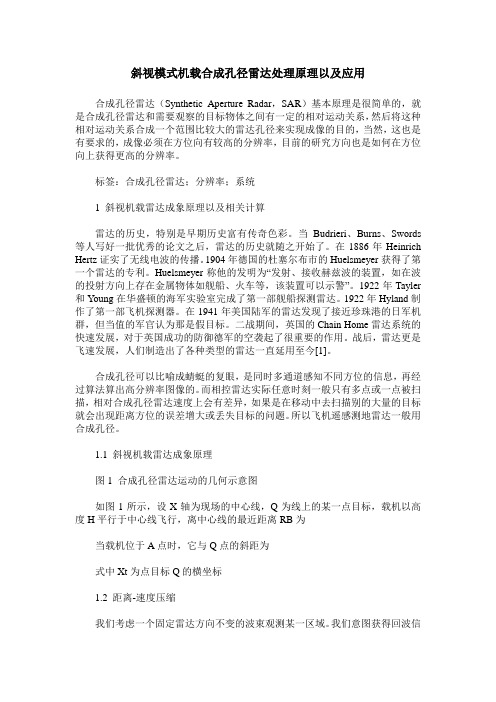
1.1 斜视机载雷达成象原理图1 合成孔径雷达运动的几何示意图如图1所示,设X轴为现场的中心线,Q为线上的某一点目标,载机以高度H平行于中心线飞行,离中心线的最近距离RB为当载机位于A点时,它与Q点的斜距为式中Xt为点目标Q的横坐标1.2 距离-速度压缩我们考虑一个固定雷达方向不变的波束观测某一区域。
改进的机载大斜视SAR距离-多普勒算法

信号/数据处理改进的机载大斜视S AR距离-多普勒算法3徐佳龙(海军驻南京地区航空军事代表室, 南京210013)【摘要】 基于斜视成像几何模型,分析了目标回波信号距离走动比距离弯曲大得多的特点。
推导了用于机载大斜视合成孔径雷达成像的改进距离-多普勒算法。
该算法基于高阶距离模型,首先在距离压缩时校正距离走动,然后在两维频域校正距离弯曲。
点目标仿真和实测数据成像结果证明了算法的可行性。
【关键词】 大斜视;合成孔径雷达;改进距离-多普勒算法中图分类号:T N958 文献标识码:AA M od i f i ed RD A l gor ithm for A i r borne H i ghly Squ i n t M ode SAR I m a g i n gX U Jia2long(Navy Stati oned Nanjing Region N avigation Military Affairs Delega tion, Nanjing210013,China)【Abstra c t】 B ased on the i m aging geo me try of squint mode,the characteristi c s of echoe s in squi nt mode are analyzed i n this paper.The re sult is tha t range wa lk ism uch large r than range bending,and a modi fied range2Dopple r(RD)a lg orithm suitable for airborne h i ghly s quintmode i maging is derived.T his a lg orithm is ba s ed on hi gh2order range mode l,which fir stly correc ts range walk in t he proce ss of range co mp re ssion and then corrects range bending in t wo di m ensi ona l frequency do m ain.The i maged re s ults of si m ulati on and Radar da t a both demonstra t e the feasibility of the algorith m p r opos ed i n t his pape r.【Key word s】highly squint mode;synt hetic aperture radar;a modified range2Dopp ler alg orit h m0 引 言合成孔径雷达(S AR)能够全天时、全天候提供高分辨率的地图信息,在战场侦察、资源探测等领域中发挥着重要的作用。
基于距离-多普勒算法的机载大斜视SAR成像

能有 效的克服 聚焦深 度和 方位 时 间 一带宽积 的限制 。成像 实验 的 结果表 明 , 算法 可应 用 于斜视 该
角较 大 的 机 载 S AR 成 像 系统 。 关 键 词 :合 成 孔 径 雷 达 ; 视 S 斜 AR; 离走 动 距
中图分 类号 : N9 7 5 T 5 .2
波数 域算法等 。 本文在 机载 S R大斜 视成像模 式下 , 细地分 A 详 析 了斜视情况 下 的 回波信 号特点 及距离徙 动校正在
( a j g R sac si t o l t nc Teh o g , nig2 0 1 ,C i ) N ni e rhI t ue f e r i c n l y Naj 1 0 3 hn n e n t E co s o n a
Ab t a t W i h r e r n l ft e h g q i t AR c o i o sd r t n,a d ma c i g t e src : t t e l g a g wak o h i h s u n h a S e h c n ieai n o n th n h s c n a y r n e c mp eso t h u i h s n a i t e o d r a g o r s in wi t e c b c p a e i zmu h,t i p p r p e e t e ag r h h h s a e r s n s a n w lo i m t
者对这个方 面作 了较为 深 入 的研究 , 出了一 些 可 提 行 的算 法 , 如非 线性 C i S an 、tpT as f1 hr c i Se rnf i 和 p l g or
透射 等优 点 , 已 被 广 泛 应 用 于 军 事 和 民用 领 域 。 现
大斜视SAR成像及凝视成像算法研究

大斜视SAR成像及凝视成像算法研究大斜视SAR成像及凝视成像算法研究摘要:合成孔径雷达(SAR)是一种通过射频合成孔径技术获取地面目标信息的重要工具。
然而,传统的SAR成像只能获取地面目标的二维形态信息,对于大斜视角度的目标,成像效果不佳。
本文主要研究了大斜视SAR成像及凝视成像算法,该算法能够提高大斜视角度下目标的成像品质。
一、引言合成孔径雷达(SAR)是一种采用射频合成孔径技术获取地面目标信息的雷达系统。
SAR通过发射合成孔径的连续波信号,接收返回的散射信号,并通过信号处理技术进行图像重构和目标检测。
然而,由于目标散射信号受到地面形状、地物类型和地物角度等因素的影响,传统的SAR成像方法在大斜视角度下的成像效果较差。
二、大斜视SAR成像算法1. 平台运动补偿大斜视角度下,平台运动对图像质量有较大影响。
因此,通过对平台运动进行补偿,可以降低大斜视角度下的成像误差。
平台运动补偿可以基于惯性导航系统或者GPS进行实时测量和修正。
此外,通过引入非均匀运动补偿,可以更好地恢复目标的几何形态,提高成像效果。
2. 非均匀采样传统的SAR成像算法在大斜视角度下采用均匀采样方式,会引起图像模糊和失真。
通过引入非均匀采样技术,可以改善大斜视角度下的成像效果。
非均匀采样可以根据目标的散射特性进行优化,在目标散射强度较高的区域进行高密度采样,而在散射强度较低的区域进行相对稀疏的采样。
3. 成像算法优化针对大斜视角度下成像模糊和失真问题,可以通过优化成像算法来改进成像效果。
传统的SAR成像算法使用点目标模型进行成像,而该模型无法很好地适应大斜视角度下的成像要求。
因此,可以采用目标形状约束模型,结合目标的散射特性进行成像。
此外,引入多视角信息和多波段信息,结合多角度、多波段的SAR数据进行融合,可以进一步提高大斜视角度下的成像质量。
三、凝视成像算法研究对于大斜视角度下的目标成像,传统的SAR成像算法成像效果较差,无法满足实际需求。
基于距离_多普勒算法的机载大斜视SAR成像
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved.
432
中国电子科学研究院学报
2006 年第 5 期
别为 t A 、 t B , 则利用前面距离公式推导过程可得两 目标的时域距离公式为 λ RA ( t) = r f ( t - tA ) 2 DC λ λ 2 3 ( 8) f ( t - tA ) f ( t - tA ) 4 DR 12 r λ RB ( t ) = r f ( t - tB ) 2 DC λ λ 2 3 ( 9) f ( t - tB ) f ( t - tB ) 4 DR 12 r 时域距离公式不但与方位时间有关 , 而且还与目标 ( 9) 三次项的变化较慢 , 将 的方位位置有关 。式 ( 8) 、 回波中三次项决定的分量与距离压缩后信号的包络 合在一起 , 利用驻定相位原理 [ 5 ] , 并假设信号的方 位时间 - 带宽积足够大 , 则可得方位时间与多普勒 频率之间具有如下锁定关系 f - f DC ( 10) t - t0 =
1 引 言
合成孔径雷达 ( SAR) 具有高分辨力 、 全天候 、 强 透射等优点 , 现已被广泛应用于军事和民用领域 。 合成孔径雷达距离向的高分辨力靠脉冲压缩技术获 得 ,而方位向的高分辨力则由雷达与目标之间相对 运动所产生的多普勒频移经处理而得 。合成孔径雷 达根据方位波束的指向分为正侧视模式和斜视模 式 : 相对而言 ,正侧视模式和小斜视模式下成像处理 过程要简单一些 ,这个方面的研究也要深入得多 ,已 有许多有 效 的 成 像 算 法 , 如 距 离2多 普 勒 ( RD ) 算 法[ 1 ] 、 Chirp Scaling 算法 [ 2 ] 及波数域算法 [ 3 ] 等 。 高分辨力 SAR 成像处理过程中的一个关键步
《机载斜视SAR地面动目标检测和参数估计方法研究》范文

《机载斜视SAR地面动目标检测和参数估计方法研究》篇一机载斜视SAR地面动目标检测与参数估计方法研究一、引言随着雷达技术的不断发展,合成孔径雷达(SAR)以其独特的成像能力在军事和民用领域中发挥着越来越重要的作用。
机载斜视SAR作为一种重要的SAR成像模式,在地面动目标检测和参数估计方面具有广泛的应用前景。
本文将重点研究机载斜视SAR地面动目标检测与参数估计方法,旨在提高目标检测的准确性和参数估计的精度。
二、机载斜视SAR基本原理机载斜视SAR是一种通过搭载在飞行器上的雷达系统,以一定的倾斜角度对地面进行扫描成像的技术。
其基本原理包括雷达信号的发射与接收、目标回波的获取以及图像的形成等。
在机载斜视SAR系统中,通过发射和接收高频电磁波,实现对地面的高分辨率成像,从而实现对地面动目标的检测和参数估计。
三、地面动目标检测方法1. 预处理与滤波在机载斜视SAR图像中,动目标与背景之间存在一定的差异。
因此,在检测之前需要进行预处理和滤波操作,以提高信噪比。
预处理包括辐射定标、几何校正等操作,而滤波则采用适当的滤波算法对图像进行平滑处理,以消除噪声干扰。
2. 目标检测算法针对地面动目标的检测,本文采用基于恒虚警率的目标检测算法。
该算法通过设定合适的虚警率阈值,对图像中的每个像素进行扫描,当像素值超过阈值时,则认为该像素处存在目标。
此外,还可以采用基于深度学习的目标检测算法,通过训练神经网络模型实现对目标的准确检测。
四、参数估计方法1. 目标轨迹估计在检测到地面动目标后,需要对其轨迹进行估计。
本文采用基于卡尔曼滤波的轨迹估计方法。
该方法通过建立目标运动模型,利用卡尔曼滤波算法对目标轨迹进行预测和更新,从而实现对目标运动状态的准确估计。
2. 速度与加速度估计针对地面动目标的运动参数估计,本文采用基于多普勒效应的速度与加速度估计方法。
通过分析目标回波的多普勒频移,可以实现对目标速度的估计;而通过对多普勒频移的变化率进行分析,则可以实现对目标加速度的估计。
基于运动补偿的机载大斜视SAR成像算法

点 , 用 时域校 距离走 动的二 维可分 离 R— 采 D算 法 , 结合 运 动 补偿 , 并 在工 程应 用 中取得 了很好 的效果 。
2 算法原理分析
2 1 大 斜 视成 像算法 .
假 设 雷 达 收集 信 号 的 几何 平 面 图 模 型如 图 1所 示 , 散 射 点 A 的 回波 信号 经 过 解 调 和距 离 压 缩 后 表 设
示为:
・
收 稿 日期 :0 5 7 8 2 0 —0 —0
2 0
维普资讯
第2 期
张 华等
基于运动补偿的机栽大斜视 S R成像算法 A
)X _ _ e p( 『 ) () 1
一
式中, r A(一
) 表示沿距离 的脉压包络 , 时变化为距离徙 动;x ( 墨 其延 ep 一
c p ns ton om e a i
1 引 言
合成 孔径 雷达 因具 有全 天候 、 天时 、 全 远距 离成 像 等特 点 , 以大大 提高 雷达 的信 息捕 获 能力 , 可 因而 成为 雷达 技术 的热 门研究 领 域 。用 于 侦察 、 测绘 的合 成 孑 径雷 达一 般都 采用 侧视 成像 , 在许 多情况 下需 要 将波 L 但 束 做 大 角度斜 指 , 如战 斗机 、 炸机 等 都需 要观 察前 方 情况 。而现 有处 理条 带模 式 的成 像 算法 一般 都不 能处 轰 理 大 斜视 角 的数据 , 坐标格 式算 法 和距离 徙 动算 法属 于 在二 维频 率域 解耦 合 , 极 他们虽 然 可处理 大 斜视 角 的 数 据 , 缺点 是需要 插值 来完 成距 离 和方位 的解 耦 合 , 其 对其 处 理条 带还 需分 块 , 算量 很大 , 以研 究 大斜 视 运 所 条 件下 条带 式成 像方 法很 有现 实意 义 。 我们 针对 大 斜视 角下 S AR信 号 的大 的距离 走动 和小 的距 离弯 曲的特
实测数据的机载斜视SAR成像算法

vni a oefr A ai .D et e poigtesba et em to r rcsigad cr c n ,teei ajmpn h- et nl n R i gn o oS m g u m l n u -pr r e df oes n or t g h r s o y h u h op n ei u igp e
0 引 言
雷达成像是雷达应用 中十分重要 的一部分 , 它具 有全天候 、 全天时、 远距离等特点 , 以大大提高雷达 可 的信息获取能力 , 在国内外被广泛应用于军事 、 探测等
触及点 目标 尸 当载机飞到 A ; 点时 , 波束后沿离开点 目 P 标 。A到 A 的长度 即为有效 合成孔径长度 L 。 。P 对 A A 的转角称为相干积累角 , 、。 它和波束宽度 等 效。A A 的中点 c即为合成孔径 中心。 、。
方面。S R成像是雷达成像 中一种重要方式 , A 目前成 像处理中通常采用方位分段处理 、 分段校正 的成像方 法¨ , J如果在距离频率 一 方位频率域 进行距离徙动
的校正 , 会在各段的交界处 出现跳跃现象 。 对成像造成 不便。本文给出一种改进方 , 使其在距离频率 一 方 位时间域校正距离徙动 , 可以避免分段跳跃 的产生。
g rh i p i sd i i p p r oi m s r 3 e n t s a e ,whc orcste l e a g l ntmed mana d tern e c rau n f q e c o t o o h ih c re t h i a rn ewak i i o i n a g uv tr i r u n yd - nr h e e
雷达成像算法的研究与应用

雷达成像算法的研究与应用雷达成像是一种基于雷达反射信号进行成像的技术,可以用于目标检测、目标识别、目标跟踪等领域。
雷达成像算法是指对雷达反射信号进行处理、分析和综合,从而得到图像信息的方法和技术。
近年来,随着雷达技术的不断发展和应用领域的不断扩大,雷达成像算法的研究和应用也越来越重要。
一、雷达成像算法概述雷达成像算法可以分为两类:合成孔径雷达(SAR)成像和相控阵雷达(Phased Array Radar,PAR)成像。
其中,SAR成像是指利用合成孔径技术对距离向分辨率进行综合,并通过合成调制方法提高成像的虚拟光圈长度,从而实现高分辨率成像的技术。
而PAR成像则是通过相控阵指向并综合多个天线的输出信号,实现对目标的高速成像和跟踪的技术。
在SAR成像中,最常用的成像算法是基于飞行器或卫星运动的正向逆向重建算法,该算法可以实现高分辨率并且具有良好的抗噪性能。
而在PAR成像中,则常采用逆合成波束算法,该算法不仅能够实现目标成像,还可以提供目标跟踪的性能。
二、雷达成像应用领域雷达成像技术的应用领域非常广泛,主要包括军事、民用、海洋、科研等领域。
1. 军事领域在军事应用中,雷达成像技术常用于舰船、飞机、导弹等目标的探测、跟踪和定位。
此外,雷达成像技术还可以用于抗干扰和隐身性能的提高,保证军队对目标进行有效侦察和打击。
2. 民用领域在民用领域中,雷达成像技术可用于气象预报、地质勘探、城市规划、交通安全等领域。
例如,在气象预报中可以使用雷达成像技术进行降雨量预测和天气风险评估;在地质勘探中可以使用雷达成像技术进行地质储层的勘探和资源开发。
3. 海洋领域在海洋领域中,雷达成像技术可用于海洋水流、潮汐、浪高、风速等海洋环境监测和海上船只的智能导航与安全管理。
同时,雷达成像技术也可以为海洋研究提供重要的数据来源,例如海上物理实验、海上生物学研究等领域。
4. 科研领域在科研领域中,雷达成像技术可以用于遥感、地形信息获取、智能交通等领域。
高速机动平台大斜视SAR宽幅成像算法研究

高速机动平台大斜视SAR宽幅成像算法研究高速机动平台大斜视SAR宽幅成像算法研究摘要:高速机动平台的大斜视合成孔径雷达(SAR)系统具有成像高分辨率、大侧视角和高机动性的特点,适用于舰船、飞机等动态目标的监测与侦察。
其中,大斜视SAR宽幅成像算法作为一种关键技术,对于提取目标信息、实现高质量的成像具有重要意义。
本文结合大斜视SAR的特点,深入研究了宽幅成像算法,包括平移变换、多通道处理和傅里叶域插值等相关技术。
通过实验验证,验证了该算法在高速机动平台大斜视SAR系统中的有效性和可行性。
关键词:高速机动平台,大斜视,SAR,宽幅成像算法,平移变换,多通道处理,傅里叶域插值一、引言合成孔径雷达(SAR)技术由于其高分辨率及全天候、全天时的成像能力,已经广泛应用于海洋、地质勘探、环境监测等领域。
然而,传统的SAR系统对于目标的成像偏角有一定的限制,且难以满足对动态目标的监测需求。
而高速机动平台的大斜视SAR系统通过机动性强、大侧视角等优势,能够实现对动态目标的追踪与侦察。
二、大斜视SAR的成像特点大斜视SAR相对于传统的SAR系统,具有更大的偏角范围和较高的角分辨率。
然而,由于平台的高速机动性,导致了SAR接收信号经历了复杂的时频变换过程,导致成像质量较差。
因此,需要对成像算法进行改进,以提高成像质量。
三、宽幅成像算法研究宽幅成像算法是解决大斜视SAR系统成像质量问题的关键技术之一。
它能够在大斜视角条件下,提取目标信息,实现高质量的成像。
本文提出了一种基于平移变换和多通道处理的宽幅成像算法。
1. 平移变换平移变换是指将SAR接收信号在距离和方位方向进行时间平移,以修正由于机动引起的时频变换。
该算法利用平台运动参数和目标距离信息,对接收信号进行合理的时间平移,从而实现目标的准确成像。
2. 多通道处理大斜视SAR系统中,由于角分辨率较高,目标散射信号经过空间变换之后,会出现成像失真和模糊。
为了解决这一问题,引入多通道处理技术。
直升机载旋转式SAR与双基SAR大斜视成像算法研究

直升机载旋转式SAR与双基SAR大斜视成像算法研究直升机载旋转式SAR与双基SAR大斜视成像算法研究摘要:合成孔径雷达 (SAR) 是一种通过合成大的孔径实现高分辨率雷达图像的无源遥感技术。
直升机载旋转式SAR和双基SAR是SAR技术的两种重要实现形式,特点是可以在直升机平台上进行成像。
本文基于直升机载平台的特点,重点研究了直升机载旋转式SAR与双基SAR大斜视成像算法。
1. 引言随着无人机和直升机在航空领域的广泛应用,利用飞机平台进行SAR成像的需求越来越大。
直升机载旋转式SAR和双基SAR 是两种常用的直升机平台上实现SAR成像的方法。
其中,直升机载旋转式SAR通过旋转天线实现立体视角成像,而双基SAR 则通过在直升机上设置两个天线实现斜视观测。
2. 直升机载旋转式SAR大斜视成像算法直升机载旋转式SAR大斜视成像算法是基于旋转式SAR成像算法进行改进得到的。
该算法通过考虑平台波束旋转对回波的影响,进一步优化成像结果。
具体实现步骤如下:2.1 数据校正由于直升机平台存在姿态变化和波束旋转等问题,需要对接收到的回波数据进行校正。
首先,进行方位校正,即将每个检测点的回波数据通过方位校正矩阵进行修正,消除平台波束旋转的影响。
然后,进行俯仰校正,即将方位校正后的数据通过俯仰校正矩阵进行修正,消除平台姿态变化的影响。
2.2 图像回波聚集校正后的数据可以得到每个检测点的单通道回波数据,为了获得高分辨率的图像,需要进行数据聚集处理。
一种常用的方法是多通道回波聚集,即将不同方位和俯仰角的回波数据进行叠加,形成高质量的合成孔径图像。
2.3 成像结果优化在得到初步的合成孔径图像后,可以针对大斜视成像情况进行优化。
大斜视成像会导致图像模糊和分辨率下降,因此需要采用合适的算法进行图像质量提升。
一种常用的方法是斜视成像模糊函数的补偿,通过对合成孔径图像进行退模糊处理,提高图像的分辨率和清晰度。
3. 双基SAR大斜视成像算法双基SAR大斜视成像算法是基于双基SAR成像算法进行改进得到的。
一种分段处理的大斜视sar成像算法
一种分段处理的大斜视sar成像算法大斜视SAR(Synthetic Aperture Radar)成像是一种利用航天器在飞行过程中合成广角视场的合成孔径雷达成像技术。
它能够获取大范围、高分辨率的遥感图像,适用于探测大尺度地物、提高目标可分辨率等许多应用。
然而,由于大斜视SAR成像过程中存在地形扭曲、多普勒频移、多次反射等问题,传统的SAR成像算法在此场景下有一定的局限性。
因此,为了实现高质量的大斜视SAR成像,分段处理的算法被提出。
分段处理的大斜视SAR成像算法主要分为以下几个步骤:1.大斜向成像几何校正:由于航天器的运动轨迹是非线性的,需要对成像过程进行几何校正,将非线性运动过程转换为线性运动过程。
此步骤常采用插值和卷积方法。
2.地形扭曲校正:由于斜视角度较大,地形对雷达波的传播会引起地形扭曲。
为了准确还原地物的形状,需要采用地形扭曲校正方法。
3.多普勒频移校正:当目标和背景不同时,由于多普勒频移效应,目标的图像位置会发生移动。
为了还原目标的位置,需要对多普勒频移进行校正。
常用的方法有多普勒参数估计和多普勒频率补偿。
4.多次反射校正:在大斜视SAR成像过程中,雷达波除了经过正常的散射反射外,还会经历多次反射。
这些多次反射波会造成图像模糊,需要进行多次反射校正。
5.行列最终成像:经过前述校正步骤后,将各个分段的数据进行融合,进行最终的大斜视SAR成像。
常用的方法有后处理滤波、图像复原等。
6.成像结果评估:对成像结果进行评估,包括抗噪性能、分辨率、几何精度等指标。
以上是一种分段处理的大斜视SAR成像算法的基本步骤。
在实际应用中,可以根据具体需求和成像情况进行适当的调整和改进。
大斜视SAR成像算法的发展对于提高遥感图像的质量和分辨率具有重要意义,在资源管理、环境监测、地质勘查等领域具有广阔的应用前景。
雷达成像算法及其性能评价研究

雷达成像算法及其性能评价研究雷达成像算法是一种利用雷达传感器获取目标信息并进行图像重构的技术。
随着雷达技术的不断发展,雷达成像技术在军事、航空、交通等领域都得到了广泛应用。
本文将对雷达成像算法及其性能评价进行研究。
一、雷达成像算法雷达成像技术可以将雷达信号转化为图像,从而实现对目标的识别和跟踪。
雷达成像算法通常可以分为以下几类:1. 基于傅里叶变换的算法基于傅里叶变换的雷达成像算法主要是将雷达回波信号进行傅里叶变换,从而得到目标的频率分布图。
这种算法可以用来检测目标的频率信息,但无法获得目标的空间信息。
2. 基于相移法的算法基于相移法的雷达成像算法主要是通过改变相位差来实现信号的有效成像。
这种算法可以获得目标的高精度的空间信息,并且可以进行实时成像处理。
3. 基于超分辨率的算法基于超分辨率的雷达成像算法主要是通过合成多张图像来提高图像分辨率。
该算法可以有效降低图像噪声和成像误差,从而获得更高精度的成像结果。
二、雷达成像性能评价雷达成像性能评价主要是针对不同的成像算法对成像效果进行评估,评价指标主要包括以下几个方面:1. 信噪比信噪比是衡量成像信号质量的一个基本指标,其值越高说明成像效果越好。
2. 分辨率分辨率是衡量图像中最小可分辨物体大小的指标,其值越高说明成像效果越好。
3. 模糊度模糊度是指成像过程中由于系统参数或者外部环境因素导致的图像模糊现象。
4. 处理时间处理时间是指进行成像处理所需要的时间,其值越短说明成像效率越高。
5. 干扰抑制能力干扰抑制能力是指雷达成像系统对噪声和其他干扰信号的抑制效果。
三、结论目前,雷达成像技术已经广泛应用于军事和民用领域,各种不同的成像算法也得到了研发和应用。
对雷达成像性能的评价可以为研发更加优异的成像算法提供指导,从而不断提高雷达成像技术的应用价值。
机载广域监视雷达高分辨成像方法研究

机载广域监视雷达高分辨成像方法研究机载广域监视雷达高分辨成像方法研究引言:随着航空技术的快速发展,机载雷达成为现代监视、侦察和情报收集领域的重要工具。
机载广域监视雷达能够在较大范围内实时监测目标,并提供高分辨率的成像。
因此,研究机载广域监视雷达高分辨成像方法具有重要意义。
本文旨在探讨机载广域监视雷达的高分辨成像方法,并阐述其应用前景及挑战。
一、机载广域监视雷达的原理机载广域监视雷达采用脉冲多普勒技术,利用雷达波束扫描大范围的地面目标,以获取目标位置、速度等信息。
其工作原理可以概括为以下几个步骤:脉冲发射、回波接收、距离测量、速度测量和角度测量等。
通过对目标的回波信号进行信号处理和数据处理,可以实现高分辨的目标成像。
二、机载广域监视雷达高分辨成像方法1. 合成孔径雷达(SAR)合成孔径雷达是机载广域监视雷达中最常用的高分辨成像技术之一。
其原理是通过合成长时间的雷达回波信号,以提高空间分辨能力。
SAR利用目标回波波束的相位差异,通过适当的信号处理和数据处理,能够产生具有高分辨率的目标图像。
2. 运动补偿成像技术在机载广域监视雷达中,由于飞机的高速运动会引起回波信号的多普勒频移,从而影响成像分辨率。
因此,采用运动补偿成像技术可以有效地消除多普勒频移的影响,提高成像质量。
运动补偿成像技术主要包括多普勒解调和运动补偿。
3. 多通道雷达成像技术多通道雷达成像技术是指通过使用多个接收通道,同时接收不同位置的回波信号,并进行融合处理,以增强图像的细节信息。
多通道雷达成像技术可以通过增加接收通道数量,提高雷达的分辨率和灵敏度。
三、应用前景与挑战机载广域监视雷达的高分辨成像方法在军事、航空航天、地质勘探、气象等领域具有广阔的应用前景。
高分辨的目标成像能够提供准确的目标信息,有助于实时监测海上船只、载具、地质构造等重要目标。
然而,机载广域监视雷达高分辨成像方法的研究也面临着一些挑战。
首先,成像算法的复杂性导致了计算量的增加,对硬件性能提出了更高的要求。
机载sar斜侧视成像的高效空变算法

机载sar斜侧视成像的高效空变算
法
机载SAR斜侧视成像的高效空变算法,通常称为ESAR (Efficient Synthetic Aperture Radar),是一种用于利用SAR (Synthetic Aperture Radar)技术进行斜侧视成像的高效算法。
它包括利用虚拟平台、动态跟踪以及多回波分析等方法,以构建准确的三维地形模型。
这项技术是利用一组横向和纵向的激光束,将信号集中在一个小的内部面上,从而实现精确的地形测量。
ESAR技术能够显著提高SAR斜侧视成像的分辨率和精度,大大减少了SAR斜侧视成像的时间和成本。
它不仅能够有效检测目标物体的位置、形状、大小和几何特征,还可以提供准确的景观结构和地形模型。
此外,ESAR技术还可以用于检测地形变化、森林覆盖度以及水体状况等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首先将距离向快时间的二次相位项进行补偿成为 一次相位项, 即乘以函数 H1 = exp( - jπγ ^ t2 ) 得到距离向只有一次相位的回波信号 2 R ( t m ; R0 ) aa ( tm ) × S1 ( ^ t, t m ; R0 ) = a r ^ t - C exp jπγ - exp( - j ( 3)
的函数。
2
大斜视成像算法
由前面分析可得: 雷达至点目标的斜距表达式, 由
于 | Vt m - X n | 远远小于 R0 , 将公式在 X = X n 处做泰勒 级数展开, 只保留二次及二次以下的项得 X R( t m , R0 ) = R0 - t m - n Vsin( θ0 ) + V Xn V2 cos2 ( θ0 ) ( tm - ) 2 R0 V — 48 —
机载大斜视雷达成像算法研究
柳柏明, 刘振华
( 南京电子技术研究所, 南京 210039 )
摘要: 基于大斜视合成孔径雷达成像的空间几何模型和回波数据的特点, 通过距离向和方位向解线性调频处理和在时域 进行距离走动和距离弯曲校正, 分别对方位向和距离向进行傅里叶变换将信号压至正确的位置上 。 该算法从成像的实时 性出发, 立足于在分辨率达到要求的条件下尽可能降低运算量和复杂性 。 由于补偿了高次相位项, 此算法受斜视角的影 响很小, 能精确地处理大距离走动和弯曲 。点目标仿真和实测数据成像结果证明了算法的可行性 。 关键词: 合成孔径雷达; 大斜视; 雷达成像
0 2
柳柏明, 等: 机载大斜视雷达成像算法研究
2011 , 33 ( 3 )
) )× 4R γR 2 γ( R + X sin( θ ) ) exp ( jπ ( - f + ( ))) × C C C V cos ( θ ) sin( θ ) X exp ( - j4 π ( 8) t - ) ) ( 2R V
( (
(
)
2. 2
方位向处理
R0 ) 经行泰勒级数展开带入 S2 整理得到 将 R( t m , S2 ( fr , tm ; R0 ) = sinc ΔT( fr +
-
(
2γ( R0 + Xn sin( θ0 ) ) ) aa ( tm ) × C
)
·信号 / 数据处理· exp - jπK1 t m -
A Study on Airborne High Squint Radar Imaging Algorithm
LIU Baiming, LIU Zhenhua ( Nanjing Research Institute of Electronics Technology, Nanjing 210039 ,China)
0
引
言
[1 ]
合成孔径雷达
( Synthetic Aperture Radar, SAR )
全避免了 RD 算法中插值校正距离徙动带来的误差, 而且把 SRC ( 二次距离压缩 ) 融入算法之中, 是一种高 CS 操作会使距离向频谱 效高精度的成像算法。但是, 随斜视角的增大而产生偏移, 扩展的 CS 合成孔径雷 达大斜视模式成像研究算法克服了这个问题 , 但仍然 无法解决 SRC 随距离变化的问题。非线性 CS 算法通 过对更高次的相位补偿, 解决了测绘带内 SRC 随距离 变化的问题, 但其处理方法过于复杂而实际应用较少 。
第 33 卷 第 3 期 2011 年 3 月
现代雷达 Modern Radar TN958 中图分类号: TN957. 52 、 文献标志码: A
Vol. 33 No. 3 Mar. 2011 文章编号: 1004 - 7859 ( 2011 ) 03 - 0047 - 04
·信号 / 数据处理·
— 47 —
2011 , 33 ( 3 )
现代雷达
1
1. 1
斜视回波模型分析
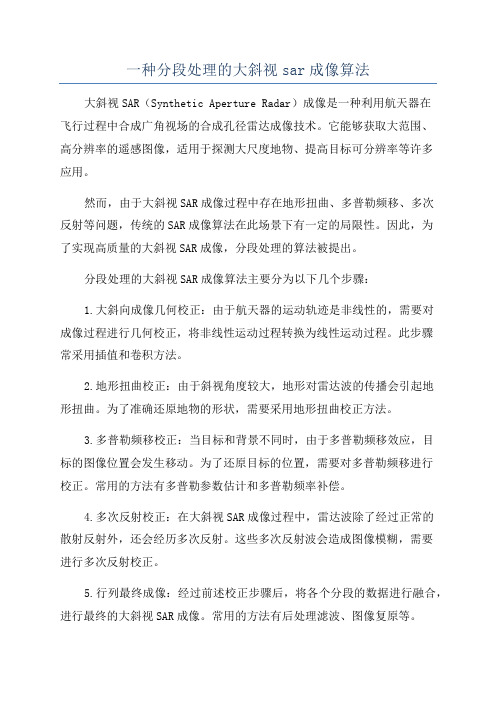
斜视 SAR 空间几何模型 如图 1 所示, 载机沿航线直线匀速运动, 点目标 P 2. 1 距离向处理
Xn V3 cos2 ( θ0 ) sin( θ0 ) ( tm - ) 2 V 2 R0
3
( 2)
的最近距离为 R b 。 设以载机位于 A 点时的时刻作为 慢时间的起点, 这时波束射线与通过 P 点而与航线的 平行线相交于 B 点, 即 t m = 0 时波束中心指向 B 点, 故 载 将 B 点作为该平行线上慢时间的起点 。经过 t m 后, 机移动到 A' 点, 其横坐标为 Vt m , 设点目标 P 与 B 之间 的横距为 X n , 则可得斜距 R 与 t m 的关系为 R( tm , R0 ) = ( Vtm 槡 - Xn ) 2 + R2 0 - 2R0 ( Vt m - Xn ) sin( θ0 )
[6 ]
m
其中 4Vsin( θ0 ) 4 K1 = 2γR0 Vsin( θ0 ) - - Vsin( θ0 ) × C C λ
0 n 0 r
K2
( X sin( θ ) ( f + 2 γ( R + C )) 4 V cos ( θ ) 4 V cos ( θ ) × = ( γV - - 2 λR C 2R C X sin( θ ) ( f + 2 γ( R + C ))
2 2 2 2 2 0 0 2 0 0 0 n 0 r
图 2、 图 3 为改进的距离多普勒算法单点仿真 , 图 4、 图 5 为本文所讲的算法单点仿真图, 左右
两图比较可以看出改进的距离多普勒算法随着斜视角 的增大聚焦性能变得很差, 而本文所述的算法随着斜 视角的曾大基本不影响聚焦性能 。上下两图相比较可 以看出本文所述的算法远远优于改进的距离多普勒算 法。单点仿真的结果验证了本文所述算法对大斜视下 雷达成像的有效性。
[2 ] 本文基于大斜视 SAR 成像的空间几何模型 和 回波数据的特点, 通过距离向和方位向解线性调频处
是集中了现代电子科学技术各种成就的高科技系统同 时它作为全天候和全天时工作的探测系统 , 已经广泛 应用于地形测绘与地质研究、 农业与林业海洋研究与 监测减灾与防灾等各个方面。斜视成像能够提供雷达 前方区域的地图信息, 实现对地攻击引导; 斜视成像在 实用中具有很高的机动灵活性。它通过天线改变波束 指向,可以对前方的目标预先成像、 对其后方的目标 再次成像。因此斜视合成孔径雷达具有很高的军事价 值, 其成像算法也必将越来越受到重视 。 最早出现具有高分辨率成像能力的算法是距离 - 多普勒算法。它通过在 RD ( 距离多普勒 ) 域插值解除 成为条带式正侧视下应 回波信号中的距离方位耦合, 用最广泛的算法。为了解决 RD 算法在斜视和宽测绘 带下距离向出现新调频分量的问题, 改进的 RD 算法 。 ChirpScaling ( CS ) 算法完 加入了二次距离压缩处理
图1
斜视工作时载机与点目标的几何关系
(
V2 cos2 ( θ0 ) 2 tm - 2 R0 ( 5)
1. 2
回波信号形式
[3 - 4 ] t) = 假设雷达发射的线性调频波 包络为 S ( ^ ar ( ^ t ) exp( jπγ ^ t2 ) , γ 为发射的 LMF( 线性调频 ) 信号的 调频率。设光速为 C , λ 为发射信号的波长, 则回波信
Abstract: Based on high squint SAR imaging of the spatial geometry models and the characteristics of echo data,the solution is processed to the linear frequency modulation in distance and azimuth. It corrected the walking distance and range bending in the time domain. And then the separately Fourier transform of azimuth and distance make the signal to the correct position. The algorithm started from the realtime imaging,based on the resolution of the required conditions,minimize the volume and complexity of operations. Because of the highorder phase compensation algorithm has little effect by the oblique angle of entry,it can accurately handle large distance walking and bending. Point target simulation and measured data imaging results demonstrate the feasibility of the algorithm. Key words: synthetic aperture radar; high squint; radar imaging
exp - jπγ
0 n 0 2 m 2 0
(
)
exp - j 4 π R ( t m ; R0 ) λ
(
)
( 6)
式中: 第 1 项为回波信号距离向的延迟; 第 3 项为快时 t 的二次相位项; 第 4 项与快时间 ^ t 无关, 间^ 是慢时间 t
m
对 S2 作距离向的傅里叶变换得到距离向脉冲压缩后 的信号为 S2 ( fr , tm ; R0 ) = sinc ΔT fr +
Xn V exp jπK2 t m -