基于μC/OS-Ⅱ的嵌入式数据采集仪的设计与研究
基于μC/OS-Ⅱ的嵌入式脉冲激光测距系统
第 2 卷 第 1 9 期
Vo. 9 12
NO 1 .
计 算 机 工 程 与 设计
Co u e g n e i g a d De i n mp t r En i e rn n sg
20 年 1 08 月
Jn a .2 0 0 8
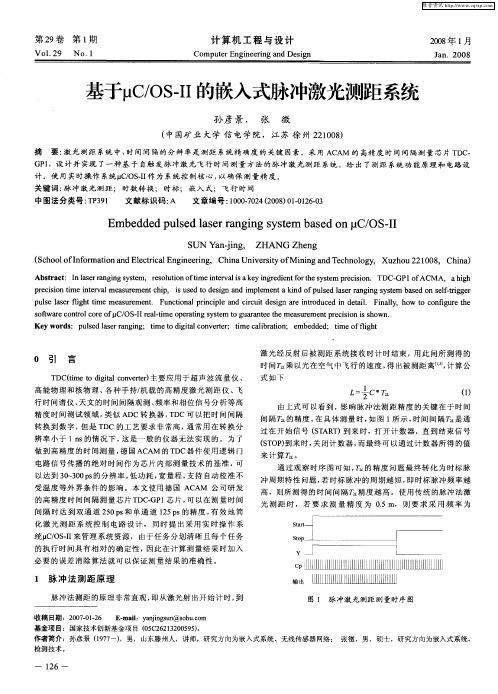
s R r o t l o eo C/ -I e l i eo ea i g s se t u r tet em e s e n r c so h wn o wa ec n o r fa OS I a - m p rt y t m g a a e a u me t e ii n i s o . r c I r t n o n h r p s Ke r s p l dl s r a gn ; t et i i l o v re ; t a i r t n e e d d t f i h y wo d : u s e e a r i g i d g t n et r i c l ai ; mb d e ; i o g t n m o a c me b o me f l
式 如 下
1
高能物理 和核物理 、 种手持/ 载 的高精度激光测距 仪 、 各 机 飞 行 时 间谱 仪 、 文 的时 间 间 隔观 测 、 率 和 相 位 信 号 分 析 等 高 天 频
精 度 时 间 测 试 领 域 , 似 A C转 换器 , D 类 D T C可 以把 时 间 间 隔 转 换 到数 字 , 是 T 但 DC的 工 艺 要 求 非 常 高 , 常用 在 转 换 分 通 辨 率 小 于 1 s 情 况 下 , 是 一般 的 仪 器 无 法 实现 的 。 为 了 的 a 这 做 到 高精 度 的 时 间测 量 , 国 AC 德 AM 的 T C器 件 使 用 逻 辑 门 D
基于μC/OS-Ⅱ的软PLC研究与实现
 ̄ / —1wa u ow r f rsu yo e cnrls cu eo o P C sse ,a dtefn t n o ytm d lsweea aye . C OS l sp tfr ad a e td ft o t t tr f f L y tm t h o r u St n h ci fs s u o e mo ue r nlzd
T e c mp lri lme tt n o o P C d v lp n y tm s gv n o t T e wo kn r cp e ts r ai n a d ts c e ui g h o i e mp e n a i fS f L e e o me t s o t s e wa i e u . h r i g p n i l , a k c e t n a k s h d l i o n o n i g s s m e e a ay e n e e r h d T e i lme tt n o e P C c mma d wa e c b d a d p e e t d At r s n , fr nn y t w r n l z d a d r s a c e . h mp e n a i ft L o u e o h n sd s r e n r s n e . i eet p ti o t L a e n t n p a td o r ttp n p a fr , a d r n ig wi tb e o e ai n a d g o ef r n e h sS f C h b e r s l ne n p ooy ig lt m P s a o n n n t sa l p r t n o d p r ma c . u h o o
ZHANG a la g, CHEN u o g, W EIHo g i g, W ANG a mio Xio in Yo d n n xn Tin a
对嵌入式实时操作系统μC/OS-Ⅱ若干问题的探究

V0 . . 1 8 No 5
对嵌 入 式 实 时操 作 系统 / / I 干 问题 的探 究  ̄ OS—I若 C
张 军伟 刘 晶璐
( 华北电力职业技术学 院, 河北 保定 0 10 ) 7 0 0
【 要 】 介 绍 了嵌入 式实时系统 / /S 1 摘  ̄ O —I的特点和基本 组成 , C 描绘 了其在产 品开发 中的现 状、 术优 势 以及 技 发展前景 。在对该系统在 实际应用 中存在 的若干 问题加 以分析、 总结 的基础上 , 出了相应 的解决思路和方法。 提 【 关键词】 t /S I 嵌入式; t O —I; C 任务调度; 邮箱机制; 任务栈 ,
0 引 言
随着半导体芯片和计算机相关技术 的发展 , 近 年来 , 嵌入 式操作 系统 在 通信 、 电子 、 自动 化 等领 域
日益显现 的重要 性 吸 引 了人 们越 来 越 多 的注 意 力 。
基于μC/OS-Ⅱ的嵌入式洗碗机控制器的设计与实现

据 ,即使 系统掉 电,储 存在 Fa h ls 内的程序 和数据 也不会丢 失 ,本设计 中采 用的Fa h l 大小为4 B t 。S AM的作用 s M ye DR 是存 放系统运行 时的程序和临时采集 的数据 ,掉 电后数据会 丢 失 ,本控 制器的S AM大小也是4 ye DR M B t 。E P OM的 ER 设计 存储空间大小 为6 K B t ,用于存放 少量 系统默认 的重 4 ye
围 电路接 口,如 匹配 电源、时钟等 。微控 制器采用 了三星公 司生产 的通用型AR M7 内核芯 片¥ C 4 0,该微控制器集成 34B 度高 ,具 有非常丰 富的外设资源和 良好 的性价比 ,目前广泛
正 应 用 于 各 种 电子 设 备 中。
方面 ,现代技术 的发展使得 家电行业 在整体技术 在都 在不 断提高 ,其 中从外观 、材料、工艺 、结构、器件 、功能等 方
本文介绍一 种简 单实用 的嵌入 式智能洗碗机控 制器 ,它 在现有 的洗碗机控 制器的基础上加 上的先进 的智 能模糊控 制 和 网络通信 、监控 功能 ,适用于 现有的洗碗机 ,可 以在不 改 变普通洗碗机结 构的基础上 ,把洗碗机升级 为 “ 智能 网络洗 碗机 ”。由于控 制器在通用 的家 电控制技术 方面与普通 家电
作。
实现 ,它最 大 程度 地 减 / 了 代 码 的 尺 寸 和 对 R M 的 需要 量 。 J \ A u1协 议 主 要 包 括 TC /P 议 组 中 的 四 个 基 本 协 议 : P P P I协 AR 、 1、 1 MP C 。 链 路 层 协 议 ,S P P,则 作 为 设 备驱 动 在 P C 、T P t P B u1底 层 实 现 :应 用 层 协 议 , ̄ H T 、 F P MT P . T P T 、S P,则 作 B 为 应 用程 序 在 u1上 层 的 实现 。 P
基于DSP和μC/OS-Ⅱ多功能电力参数智能检测仪设计
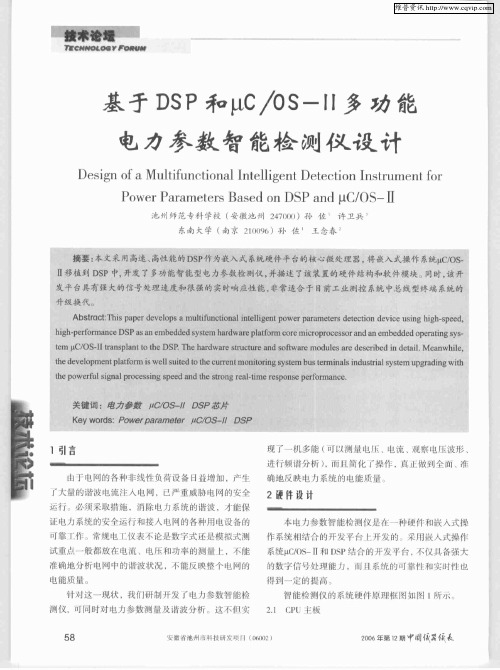
智能 榆测仪 的系统硬件原 理框 罔如 l 所乐
21 C U 主 板 . P
世 池州I l 城If6 2 融肯 『 l [1 r f I )0 制牲I 班 1
20年 2 0 第1期中阅讴嚣佰表 6
维普资讯
信
号 调
: .键 盘与 L D显 . C
确地反 映电 力系统 的电能质 量 ,
2硬件 设计
本 电力参数智能榆 测仪 是扯一种碰件 和陵 人式操
作 系统 相结合 的开发平 台 卜 开发 的 采用 嵌人式操作 系统g / S I和 D P 合的 外发平台 . 仪 具备强大 CO — I S结 的数字 信号处理 能 J .而 n系统 的可 靠怍 和实H f. J 、l t: 电 得到一 定的提 高
维普资讯
' ■ “ t¨ ; 零 :
基于D : / I S  ̄p o —I P o c s 多功能
电力 参 数 智 能检 测仪 设 计
D sg f h fn t n l n el e t tcinI s u n r e ino Mu i ci a tl g n e t n t me t o a u o I i De o r f
Ⅱ移植到 D P中. S 开发 了多功能智能 型电力参数检 测仪 . 并描述 了该 装置的硬件 结构和软 件模块 . 同时, 开 该
发平 台具有 强大的信号处理速度 和很强的 实时响应性能 , 非常适 合于 目前 工业刹控 系统 中总线 型终端 系统 的
升级换代 . .
Ab t c : i a e e eo samu t u ci n ln el e t o r a a tr ee t n d v c s g hg -p e 。 sr t a Thsp p rd v lp l f n t a tl g n we r mee sd t ci e ieu i i h s e d i o i i p p o n hg - e o ma c DS ne e d ds se h rwae ltom c r mir p o e s r n ne e d do e aigs s ih p r r n e P a a mb d e y tm a d r p af r o e co r c so a da f s mb d e p r t y - n tr C/ ・1 rn pa to teDS h ad r t cu ea d s fw r d lsaed s r e ea lMe n i . e I OS 1 t s ln h E T eb r wa c r tr n o t a emo u e r ec i di d t i n J a t su b n . a wh l e
基于ARM和μC/OS-Ⅱ的嵌入式数据库系统设计
第3 1卷 第 2期
20 0 8年 2月
合肥 工 业 大 学 学报 ( 自然科 学版 )
J OURNAL E OF H FEIUNI VERS TY I OF TECHNOL OGY
Vo . 1 N O 2 13 . Fe . 2 0 b 08
s se b sdo h lt r o M P 2 0wi h nen t u cino l n/ evrh sb e y tm ae nt epaf m f o AR L C 2 1 t teI tr e n t f i tS re a en h f o C e
r a ie .Th a e fe s d t i s i h e i n o h y t m t u t r ,p y i a t r g t u t r , el d z e p p r o f r e al n t e d s g ft e s s e s r c u e h s c ls o a e s r c u e e
b sct besr c u ea d id x sr cu e Th r c ia p l a in o h ss se en o c d i u e i a i a l tu t r n e tu t r. n ep a tc l p i t ft i y tm r if r e t s p r— a c o s o i e n t es u c—i t de b d e y tm t e trp ra i t . rt si h o r el i mie m e d d s se wih bt r g n n g m e t On t e b s s o n l zn n v r a a a a e n e e d d d t b s a a s o a e a d ma a e n . h a i f a a y i g u i e s ld t b s ,a mb d e a a a e
基于μC/OS—Ⅱ嵌入式平台的以太网通信系统
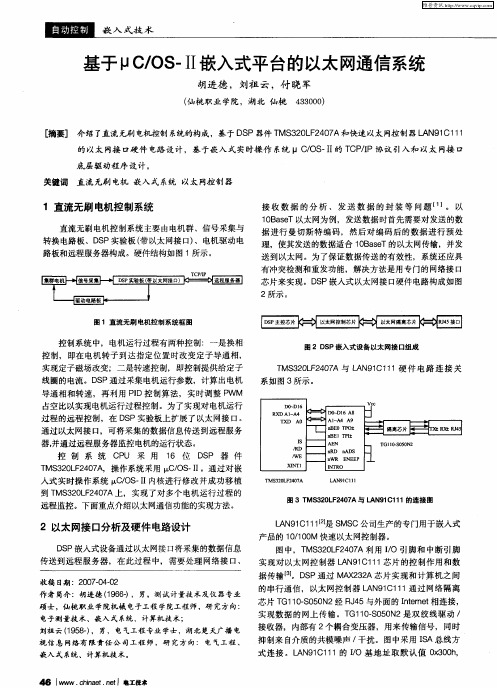
LN 1 1 J S S A 9 C 是 M C公司生产的专门用于嵌入式 1 产品的 1 /0 M快速以太网控制器。 10 0 图中,T 3 0 F 4 7 MS 2 L 2 0 A利用 I / O引脚和 中断引脚 实现对 以太 网控 制器 L N 1 1 1 A 9 C 芯片 的控制作用和数 1
维普资讯
耍 豳
嵌 入 式技 术
基于 I / S I嵌入式平台的以太网通信系统 - O —I J C
胡进 德 ,刘祖 云 ,付 晓 军
( 仙桃职业 学院 ,湖北 仙桃 430) 3 0 0
[ 摘要] 介绍 了 直流无刷 电机控制 系统的构成 ,基于 D P器件 T 3 0 F 4 7 S MS 2 L 2 0 A和快速 以太网控制 器 L N 1 1 A 9 1 C1 的以太 网接 口硬件 电路 设计 ,基于嵌 入式实时操作 系统 IC OS I的 T / | / —I CPI P协议 引入和 以太 网接 口
据传输【。D P通过 M X 3 A芯片实现和计算机之间 3 S 】 A 22 的串行通信,以太 网控制器 L N 1 1 1 A 9 C 通过 网络隔离 1
芯片 T 1 S 5 N G 一0 0 2经 R 4 1 0 J 5与外面的 Itr t ne e 相连接, n 实现数据 的网上传输。T 1 0S 5 N G ・0 0 2是双绞线驱动 / 1 接收器,内部有 2 个耦合变压器 ,用来传输信号,同时 抑制来 自介质的共模噪声 / 干扰 。图中采用 IA总线方 S 式连接 。L N 1 1 1的 V A 9C 1 O基地址 取默认值 03 0 , x0h
控 制 系 统 CU 采 用 P 1 位 D P 器 件 6 S T 3 0 F 4 7 ,操作系统采用 i / S I。通过对嵌 MS 2 L 2 0 A  ̄ O —I C
μC/OS—Ⅱ实时性能测试与研究

该 内 核 的 I R 进 入 函 数 的 执 行 时 间 S
1 u/ c OS—l实 时性 能 测 试 指 标 I
个 最 重 要 的 指 标 参数 进 行 测 试 分 析 。
中断 延 迟 时 间一 关 中 断 的 最 长 时 间 + 开 始 执 行 中 断 服 务 子 程 序 (S 的 第 1条 指令 的 时 间 I R)
关 中 断 的最 长 时 间 取 决 于 运 行 时 不 同 的 情 况 , 他 参 其 数 在 其 系 统 中都 有 固定 长 度 代 码 。 中 断 响 应 是 系 统 在 最
实 时操 作 系统 。其 内核 提 供 任 务 调 度 与 管 理 、 间 管 理 、 时
任务 间同步 与通信 、 内存管理 和中断服务等 功能 。
现 在 许 多 工 业 控 制 系统 用 到 了 u / s— I为 了 对 其 c o I,
实 时性 有 更 深 入 具 体 的 了解 , 文 对 v / 本 C OS—I 的 实 时 性 I 进 行 了测 试 和 分 析 , 实 时 系 统 设 计 中具 有 现 实 意 义 。 在
维普资讯
 ̄ / S—I实 时性 能测 试 与研 究 CO I
■ 北 京 交 通 大 学 戴 亮 戴 胜 华
任 务 切 换 时 间和 中断 响 应 时 间是 嵌 入 式 实 时操 作 系统 实 时 性 能 的 重要 指 标 。 本 文 对 v / C OS—I 上 述 I的
时 间 范 围 内 作 出 响 应 。 它 强 调 的是 实 时 性 、 靠性 和 灵 活 可 性 , 实 时 应用 软件 相 结 合 成 为 有 机 的 整 体 , 着 核 心 作 与 起 用; 由它 来 管理 和 协 调 各 项 工 作 , 应 用 软 件 提 供 良 好 的 为
基于RAM和μC/OS-Ⅱ的嵌入式移动机器人平台设计

或者运 算 能力有 限 的缺 点 , 另外 , 有 的机 器人 控 制系 统 现 基 本上 都是 针对 某一 特定 类 型 的机 器人 所 设计 的 ,不 能
跨领域使用 , 而对于将来的机器人使用环境 , 将会是立体
化 、 方位 、 元混 杂 的 形 态 , 种 不 同 的 移 动机 器 人 将 全 多 各
种具 有层 次化 、 块 化 、 构 化 、 扩 展 、 模 结 易 可移 植 、 定 可
制 、 件体 积小 、 硬 功耗 低 、 时性 强 、 实 可靠 性 高等 优点 的移
收 稿 日期 :2 0 — 0 2 06 1 -0
基 金 项 目 :云 南省 科 技 厅 自然科 学基 金 项 目 (0 5 0 1M ) 2 0E 08
保安机 器人 、排 爆机 器人 来自导游机 器人 、娱 乐机 器人 、 家庭服 务机 器人等 不 同的移动机 器人 平 台。
关键 词 :嵌入 式操作 系统 ; 移动 机 器人 ;p OS  ̄ C/ -Ⅱ
中圈分 类号 :T 2 2 P 4
文献标 识码 :A
文章 编 号 :lo — 6 3 (o 7 1 0 4 0 o 2 6 7 2 o )0 — 1 — 2
一
() 1具有 脉宽调 制功能 。机器人 使用轮 式驱动 , 差动控 制; 使用 P WM 方式来调整机器人 的运动状态 和云 台的姿态 。
() 有 避 障 、 部路 径 规 划 功能 。能够快 速 躲 避 障 2具 局
碍 物和优 化 局部 路径 。 () 3 具有语音 以及触摸屏交互功能 。 能够进行语音控制 ,
同 的控 制 平 台 , 会 导致 设 计 成 本 高 、 调控 制 复 杂 、 将 协 兼 容性 和维护 性差 等一 系列 问题[ 2 3 。 为 了适 应 当前 社会 对 机 器人 的需 求 ,我们 需要 开 发
一种基于μC/OS-Ⅱ的便携式振动测量分析仪
d sg e ,h y c 0 z t n a d c e in d te s n hrnia i n omm u iat as s a ea. O nc i ofhet k r on t
c iv .F e en y d mai alss j c he ed r qu c - o n an y i S ac ompl h d b meho f i e y s t d o
学 系 统 以 及 动 力 系 统 等 诸 多 方 面 。本 论 文 根 据 激 光 器 的 Nhomakorabea基 本
原理 和组 成 , 以调 Q技术和选模技术 为基础 , 并 在此系统 上完 成 了 N ” :A d Y G脉冲激光器的选模方法的测试。口
参考文献
[] 1 蓝信钜. 激光技术.j 京 : 科学 出版社.0 1 20 . [] 2 吕百达.固体激光器件.北京 : 北京邮 电大学出版社.20 . 0 0 [ ] 美 ]w. 西 奈 尔 .固 体 激 光 工 程.北 京 :科 学 出 版 3[ 克
文章编号 :6 1—14 (0 8 0 17 0 1 2 0 )6—03 0 0 7— 3
一
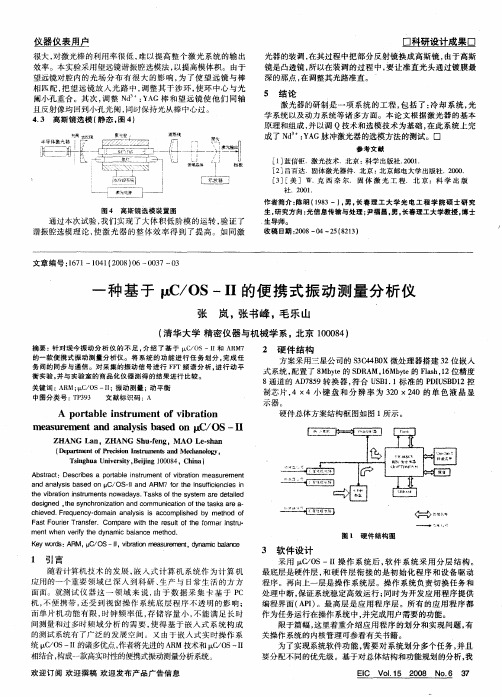
种基 于  ̄ / c os—I 的便 携 式 振 动 测 量 分 析 仪 I
张 岚 , 书峰 , 乐山 张 毛
( 华大 学 精 密 仪器 与机械 学 系 。北京 1 0 8 ) 清 0 0 4
摘 要 :针 对 现 今振 动 分 析 仪 的 不 足 。 绍 了 基 于 D / S—I 介 CO I和 A M7 R
《圈
— - —
F s ouirTr n f . Comp e wi h e ul o h or lrjs r. a tF r a ser e ar t t e rs t fI e f i e n tu h f
嵌入式实时操作系统(μCOS-II)原理与应用-目录与正文-最新版第一部分

目录学习情境一、嵌入式系统概述及集成环境的搭建与使用 (1)一、知识要点:嵌入式系统概述 (1)1.嵌入式系统基本概念 (1)2.嵌入式系统的特点 (2)3.嵌入式系统的应用领域 (3)(1)工业控制领域 (3)(2)信息家电 (4)(3)交通管理、环境监测、医疗仪器 (4)(4)嵌入式Internet应用 (4)(5)军事国防领域 (5)4.嵌入式系统的发展 (6)5.嵌入式系统的开发流程 (7)6.嵌入式系统的调试 (10)(1)在线仿真器(ICE)方式 (10)(2)在线调试器(ICD)方式 (11)(3)监控器方式 (11)7.基于μCOS-Ⅱ的嵌入式系统软件体系结构 (11)二、技能要求:嵌入式系统交叉开发环境的搭建 (2)1.交叉开发环境 (2)2.使用集成开发环境进行软件开发的流程 (2)3.ARM ADS集成开发工具及其组成 (3)(1)ADS集成开发工具 (3)(2)ADS集成开发工具的组成 (3)案例1.ADS 1.2的安装 (4)案例2.ADS集成开发环境的使用 (5)(1)新建工程 (5)(2)配置新建工程 (6)(3)添加文件,完成编译与链接,并生成目标文件.......... 错误!未定义书签。
案例3.其它工具的使用 .............................................................................. 错误!未定义书签。
(1)仿真器的连接与使用................................ 错误!未定义书签。
(2)超级终端的设置及映像下载.......................... 错误!未定义书签。
(3)Source Insight代码编辑器的使用.................... 错误!未定义书签。
学习情境二、嵌入式平台的接口驱动................................................................... 错误!未定义书签。
基于μC/OS—Ⅱ的嵌入式网络数据采集模块的设计
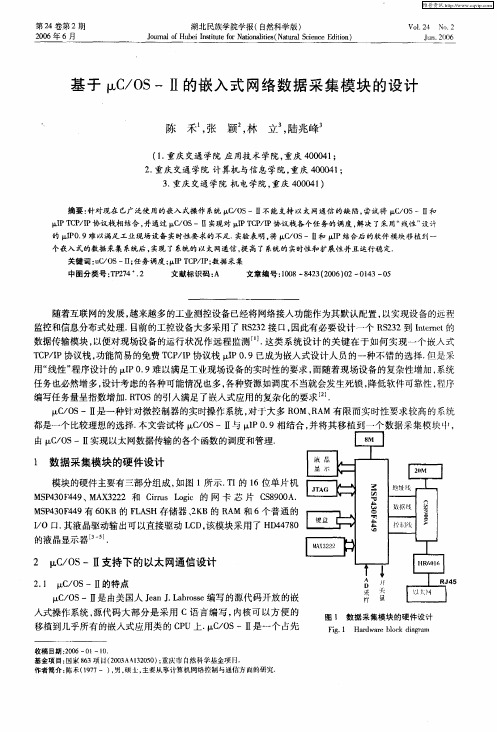
MS40 4 9有 6 K P3 F4 0 B的 F A H存储 器 、K LS 2 B的 R M 和 6个 普 通 的 A
iO口. / 其液晶驱动输出可以直接驱动 L D 该模块采用了 HM48 C , I 70 的液 晶显示 器 ' J 3 .
2 I / S一Ⅱ支持 下的以太 网通信设计 , O z C
F g 1 Ha d ae bo k d a r m i. r w r lc ig a
维普资讯
14 4
湖北 民族学 院学 报( 然科学版 ) 自
第 2 卷 4
式的内核 , 这个特点使得它的实时性 比非 占先式的内核要好. C O 一Ⅱ I/S x 可以管理 6 4个任务 , C O  ̄ / S—I I 把 任务的优先级当做任务的标识来使用 , 如果优先级相同, 务将无法区分. 任 因此赋予每一个 任务 的优先级必 须是不同的 本文将 整个 网络 数据通信 分为 网络 主任务 ( E — AN A K 、 川. N T M IT S ) 以太 网数据包接 收任务 (T — E P L —A K 、 D E H R — O L T S ) U P处理任务 ( D _ A K , U P T S ) 和周期时钟任务 ( E I — A K 4个任务 ,  ̄ / S P RO T S ) 由 C O
T P I 协议栈 , C /P 功能简易的免费 T P I C /P协议栈 tP09已成为嵌入式设计人员 的一种不错的选择. r . i 但是采
用“ 线性” 程序设计 的 P09 以满足工业现场设备的实时性 的要求 , I . 难 而随着现场设备的复杂性增加 , 系统
任务也必然增 多, 设计考虑的各种可能情况也多, 各种资源如调度不当就会发生死锁 , 降低软件可靠性 , 程序 编写任务量呈指数增加. T S的引人满足 了嵌入式应用的复杂化的要求 . RO J v / S一Ⅱ  ̄O C 是一种针对微控制器的实时操作系统 , 对于大多 R M、 A O R M有限而实 时性要求较高的系统 都是一个比较理想 的选择. 本文尝试将 v / S  ̄ O 一Ⅱ C 与 I . P09相结合 , 并将其移植 到一个数据采集模块L , } 1
基于μC_OS-Ⅱ的微机保护系统的设计
A Design of Protective Relay System Based on p C/OS-Ⅱ
YANG Feng-ping,LIU Liang
E11倒llg,East (School of Electrical and Electronic
China Jiaotong University,Nanchang 330013,China)
主要足完成一些应用系统和操作系统的初始化工作,并让系统进入实时操作系统管理下的多任务运行环 境。其中应用系统的初始化主要包括ARM本身初始化、与ARM相连的一些外围设备的初始化和应用系
万方数据
42
华东交通大学学报
2009年
统所用到的一些全局变量、参数等的初始化。其程序流程图如图3所示。 (2)多任务模块进入运行环境的程序流程 当多任务模块进入运行环境,各个任务的调度全部交由嵌入式实时操作系统去完成,其程序结构与传
(4)OS—TASK—SW()是一个宏,用以实现任务从低
优先级向高优先级切换,它用于任务级代码中。其代 码如下:静define OS—TASK—SW OSC洒w。 2.2 oS.CPU.C.C代码的移植
OS。CPU.c.C代码需要移植lO个简单的相关函数,
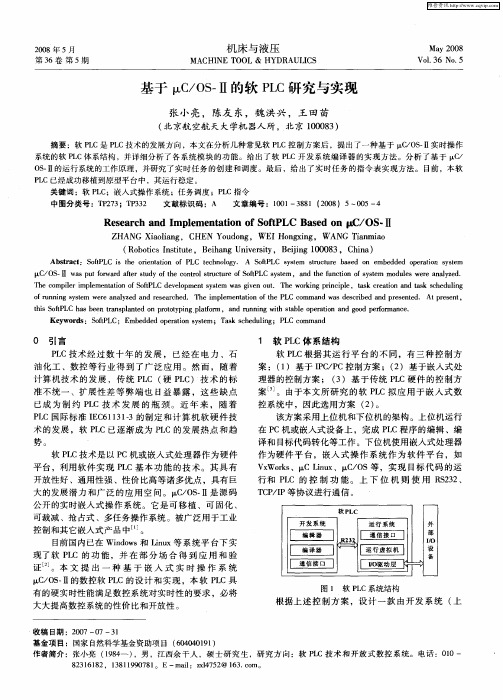
[二三硬软]件件 [】口
但在一般情况下,仅仅需要移植任务栈初始化函数os. TaskStklnit(),其它9个函数可以用简单的空函数来实
中图分类号:TP274
文献标识码:A
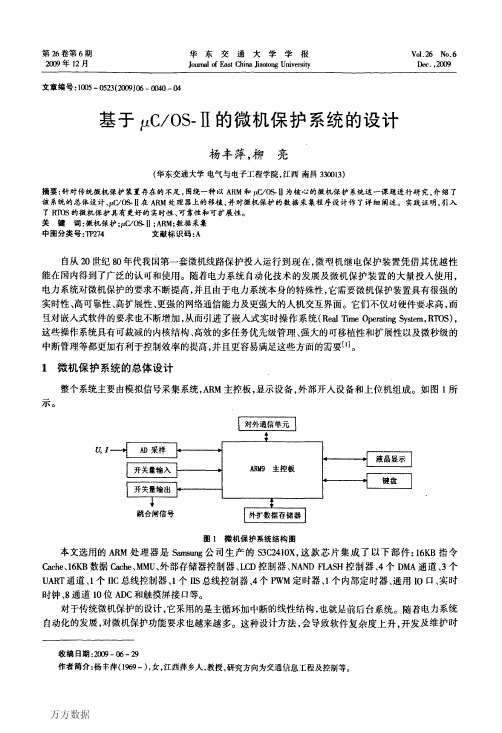
自从20世纪80年代我国第一套微机线路保护投入运行到现在,微型机继电保护装置凭借其优越性 能在国内得到了广泛的认可和使用。随着电力系统自动化技术的发展及微机保护装置的大量投入使用, 电力系统对微机保护的要求不断提高,并且由于电力系统本身的特殊性,它需要微机保护装置具有很强的 实时性、高可靠性、高扩展性、更强的网络通信能力及更强大的人机交互界面。它们不仅对硬件要求高,而 且对嵌入式软件的要求也不断增加,从而引进了嵌入式实时操作系统(Real Time Operating System,RTOS), 这些操作系统具有可裁减的内核结构、高效的多任务优先级管理、强大的可移植性和扩展性以及微秒级的 中断管理等都更加有利于控制效率的提高,并且更容易满足这些方面的需要…。
基于μC/OS—Ⅱ嵌入式远程网络智能节点的研究与应用

关犍词 : 嵌入 式 系统 以太 网 ¥ C 50 C O l 3 4 1B u / S— J
1 引言
传统 的工业现场 设备普 遍具有 数据传输 量小 、 时 滞 大、 数据 处 理 能 力 弱、 品兼 容 性 差 等 缺 陷 , 产 即使
上已包 含 了以太 网 MA C控 制 , 并未提 供物 理层 接 但
Z 故需 外接一 片物理层 芯片 ,以提供 以太 网的接入 I, l
维普资讯
20 年 第 1 期 06 2
计 算 机 系 统 应 用
基于 u / S— I O I嵌入式远程网络智能节点的研究与应用 C
Th e e r h a d a pl a n o h m t d e 0n —d s a c I , r s a c n p to ft e e b d d I — d t n e e h P i i PI c 0 e l g on i nt e wor n e l e c od s b s d on I / k i t l g n e n e a e OS — I i J C —I
信号 , 拟信号经 A D转 换、 关 量信 号 经滤 波及 光 模 / 开
展大容量 的存储 器空 间来运行操 作系统 。 3 1 存储器 .
¥ C 50 3 4 1B处理 器支持统 一 的内存 地址空 间 , 用 使
电隔离等运算 、 理后送入 C U, 处 P 并通过 以太 网络接 口 利 用 TP I C /P协议传送给远程 控制终 端 ; 同时接收终 端
务 的要求 ; P I T / C P开放通信协议 的移植 , 更顺应 了工业
基于μC/OS Ⅱ的远程数据采集系统
文章 编号 :6 2— 5 X( 0 6 0 0 5 1 7 0 8 2 0 )4— 3 7—0 3
基 于 I / S I的 远 程 数 据 采集 系统 x O I C
李 淼 浩
( 重庆市 江北 区教师进 修学院 中小学教研部 , 重庆 40 2 ) 0 0 0
1 系统 组 成
图 l 分布于不 同地理位置的数据采集终端借助于 G R / D A无线 网络接入 Itnt : 是 P SC M n r 网络与控制 ee 中心之间: 现远程数据传输 的示意图。图 l 实 中各采集控制终 端一方面担负对现场数据采集与控制 , 另一 方面又可以作为远程终端 ( 从站) 通过 G R / D A M dm上网与控制中心 ( P S C M oe 主站) 建立起 用于传输数据 的 T P I 接 , 站 也可 以通过 此 T P I 接 发送 命 令 或 者 数据 给从 站 , 现 信 息 交 换 。 可 以 充 分 发 C /P链 主 C /P链 实 挥无线 网络所具有的“ 永远在线” “ 、 自如切换” “ 、高速传输” 免费漫游” 和“ 等功能。
摘 要 : 绍 了一种 采 用 3 介 2位 微控 制 器 A M7为核 心的 , w / S I R 以 C O 为操 作 系统 的嵌 入 式 I 系统 平 台 , 通过 移植 基 于  ̄ / SI 系统 的 T P I 议 , CO I C /P协 实现 C M / x无 线 网络 的 远 程数 据 传 D A1 输 方 案。 分布 于 不 同地 理 位置 工作 现 场 的各 种 传 感 器、 控 装置 通 过 此 嵌入 式 系统 平 台并 借 助 监 于 C M / x网络 和 Itn t D A1 ne e 建立起 与 上 位机 间的 T P I r C /P链接 , 实现 了远 程数 据 的 实 时 采 集 与 控 制 。A M R 7微 处理 器既 控 制传 感 器数 据 采 集 、 筛选 , 作 为 通 信控 制 器与 无 线 Mo e 间进 行 还 dm 数 据 传输 和格 式 转换 。详 细分 析 了基 于 A M7技 术 ቤተ መጻሕፍቲ ባይዱ 远 程 终 端硬 件 设 计 原 理 并介 绍 软 件 设 计 R
基于实时操作系统μC/OS—Ⅱ的数控系统研制
t控 纛 缱 C s s NSl Cym e
基 于 实 时 操 作 系统 I / J OS—I的数 控 系统 研 制 C I
杨代 华 陈志辉
(中国地 质大 学机械 与电子工 程 学院 , 湖北 武 汉 4 0 7 ) 3 0 4
摘 要 : 细介 绍 了  ̄ / 详 c os一Ⅱ 实 时操 作 系统在 C 0 1 14单 片机上 的移 植 , 设计 了一个 基 于  ̄ / 85 F 2 并 c os— I 实 时操作 系统 的数控 系统 的软 硬件 结构 , I 并给 出了数 控 系统 软件 模 块 的任 务 划分 , 此基 础 上 实 在 现 了嵌 入式数 控 系统 。 关键 词 : c os— I 数 控 系统  ̄/ I C 0 1 1 4 任 务 8 5 F 2
数控 系统 的重 构成 为 可能 。基 于 U B总 线 的 数 控 系 S 统将 促进 数控 系统 可重 构 的发 展 , 实现 可 重 构 制 造 为 系统 奠定 基础 。为 了实 现 数 控 系统 软 件 的 可 重 构 , 文 中提 出 了数控 系统软 件通 过核 心支撑 平 台和若 干完成
b s do e ae p n—C C s s m, 0 4,3 7—8 :0 N yt e 20 统模块化设 汁的研制与开发. 工业控制
3 S n sk Pa k,S n— Ho Ki u g i r u m,Hy n o C o u b h .T e d v lp n f ed h e e o me t f l - o ai
U B接 口将各 种功 能模 块 插 入 工 控 机 中 , S 只需 通 过 编 制 相应 的设备 驱动 程序 来 实 现 其 功 能 , 不必 对 上 层 而
A b t a t: h sp p rd s rb st e ta p a tto ftC/OS — I ot e C8 51 4 M CU n deal n n e b d s r c T i a e e ci e h r ns l n ain o L It h 0 F1 2 i ti ,a d a m e - d d CNC s se wa r s n e a e n t e m b d d r a e y tm s p e e td b s d o h e e de e l— tme o e ai g s se i p r tn y tm tC/OS — I. Th L I e h r wa e a d s fwae a c ie t r r ic s e a d r n ot r r h tc u e we e d s u s d. Fi al h o ls o h y tm r e c be n ly t e m due ft e s se we e d s r d. i Ke ywo d tC r s:L /OS — I I;Nu e c lCo to y t m ;C8 51 4 ;Ta k m r a n r lS se i 0 F1 2 s
基于μC/OS—Ⅱ的全数字汽车仪表
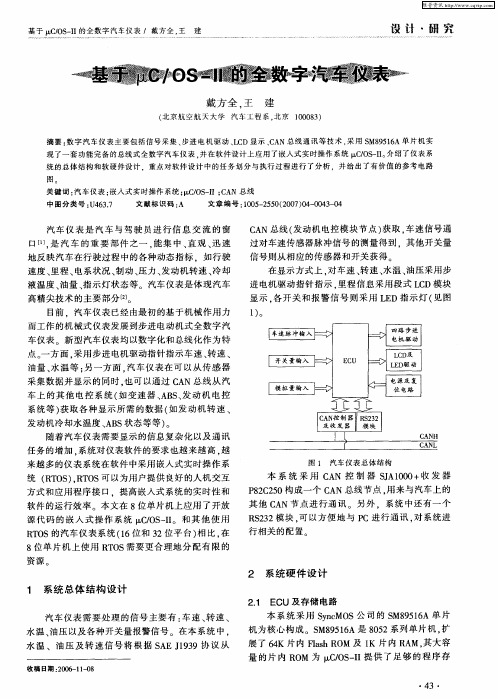
本 系 统 采 用 C N 控 制 器 SAI0 +收 发 器 A J O0 P 2 2 0构成 一个 C N 总线节 点 . 来与 汽车上 的 8C 5 A 用 其 他 C N节 点进 行通 讯 。另外 。系统 中还 有一 个 A R 2 2模 块 . 以方便 地 与 P S3 可 C进 行通 讯 , 系统 进 对 行相关 的配置
汽车 仪 表 是 汽 车 与 驾 驶 员 进行 信 息 交 流 的窗 口…. 汽 车 的 重 要 部 件 之一 , 集 中、 观 、 速 是 能 直 迅
地 反映 汽车 在行驶过 程 中的各种 动态 指标 .如 行驶 速度、 程、 里 电系状 况 、 动 、 制 压力 、 发动 机转速 、 却 冷
C N 总线 ( 动机 电控 模块 节 点 ) A 发 获取 , 速信号 通 车 过 对车速 传感器 脉冲信 号 的测量得 到 .其 他开关量 信号则从 相应 的传感 器和开关 获得 。
在显 示方式 上 。 车速 、 对 转速 、 水温 、 压采用 步 油
液 温度 、 量 、 油 指示灯 状态 等 。汽车 仪表 是体 现汽 车 高 精尖技 术 的主要 部分 [。 2 _
2 系统 硬 件 设 计 1 系统 总体 结构 设 计
21 E U及 存储 电路 . C
汽车 仪表 需 要处 理 的 信号 主要 有 : 速 、 速 、 车 转 水温 、 油压 以及 各种 开关量报 警信号 。在本 系统 中 , 水 温 、油 压 及 转 速 信 号 将 根 据 S E J 9 9协 议 从 A 1 3
嵌入式开发-基于μCOSII的纸币识别接收器的设计与实现

基于μC/OSII的纸币识别接收器的设计与实现范志伟1金瓯1,2贺建飚1,2(1. 中南大学信息科学与工程学院,湖南长沙 410083 ;2. 湖南省金融货币识别与自助服务平台工程技术研究中心,湖南长沙 410004)摘要:无操作系统的纸币识别接收器仍占市场的主流,功能扩展性方面比较有限,将μC/OS-II实时嵌入式操作系统移植到8位51单片机上来开发纸币识别接收器,提高了系统可靠性和功能扩展性.根据实时性的要求设计了关键的数据收集电路,根据系统工作原理将功能详细划分为任务,整个软件系统经编译调试能满足预定要求.关键词:μC/OSII; C51; µPSD3233; 纸币识别接收器;中图法分类号:TP391 文献标识码:ADesigning and Applying of Bill Acceptor Based on μC/OSIIFan Zhiwei1, Jin ou1,2, He Jianbiao1,2(1. School of Info. Sci. and Eng. ,Central South Univ. ,Changsha 410083 ,China ;2. Hunan Eng. Tech. ResearchCenter for Currency Recognition and Self - service , Changsha 410004,China)Abstract:The bill acceptors without Operating System are still the mainstream product in the market. This kind of acceptors is limited in the functional extension. By porting the Real-Time Operation System to the 8-bit single-chip microcomputer to design the bill acceptor, the reliability and functional extension of the system are improved. The key circuits for data acquisition were designed and the function was divided into several tasks which can communicate according to the principle of the system in detail. After Compiled and debugged, the whole software system can satisfy what we demand before.Key words:μC/OSII; C51; µPSD3233; bill acceptor1引言纸币识别器的机械、电机控制方面也已比较完善,但目前国内外主要厂商的主流产品都是基于无操作系统的单片机,在功能、扩展性等方面比较有限。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的控 制 下 , 取 键盘 、 口等 J 户请 求 和信 息 , 读 串 { j 将采 集
到 的数据 通过 液 晶显 示 界 面 爪 } 来 , f J 同时也 可 以通
全 的首要前提 和保 障 , 是激 烈 市场 竞 争 中企 业 降低 生
产 成本的主要 努力方 向 。而且许 多 大型 的机械设 备价 格昂贵 , 一旦发 生 故 障 , 会 造 成 巨大 的 经 济损 失 , 将 冈 此 对这些设 备进 行 状 态 检 测 及 故 障 诊 断 是 非 常 必要 的, 机组设 备 町作 为状态检 测 和诊断 的信 号多 种多样 ,
中图分 类 号 : 2 4 文 献标 识码 : 文章 编号 :6 22 9 ( 0 6 0 0 70 TP 7 A 1 7 — 6 8 2 0 )40 5 — 3
现代 化 业 中设 备集成 度和 I动化程 度 的快 速提 I : ; 1
高决定 生产设 备的安全无 故 障运 行是 人们 生命财 产安
重 要的理论 意义和实 际的工程应 用价值 。
一
电 焦遒i 量控
图 l片上 数 米 系统 的 硬 件 总 体 框 图
、
系统硬 件设 计 本 系统 选 用 美 国 C g a 公 司 的 C 0 l 0 0作 ynl 8 5F 2
( ) 控 制 器 C8 5 F( 0 一 微 0l ) 2
C 0 1 0 0 简称 F 2 ) 美 国德 州 C g a 公 司 85 F 2 ( OO是 ynl
为控 制 芯 片 . 以 c (s Ⅱ为 嵌 入 式 操 作 系 统 , 究 / )一 研
一
推 出的 一 种 混 合 信 号 s ) 型 8位 片 机 。它 属 于 (C C 01 8 5 F系列 中的 F 2 0 x子 系 列 。其 性 能 价 格 比在 目 前应 用 领域极 具 竞争 力 ] 。
通 过 之后 再 联 合 调 试 。MC 主 板 主要 完 成 整 个 系 U
4 两个 l . 2佗 D AC, 可编 程 更新 时 序 。 5 6 K 字 节可 在 系统 编程 的 F H 内存 .4 I AS 6 45 4 9X . 3 2( 0 6 RAM + 2 6 AM) 节 的 片 内 5R 字
V 01 9 N O 4 .1 . 1 c 2 06 3e . 0
基于  ̄ / 一 c os Ⅱ的嵌 入 式 数 据 采 集 仪 的设 计 与研 究
金 珂 , 艳 菊。徐 赵 , 跃。
( . 岛职业技 术 学院 教 i 处 , 1青 1 ) i 山东 青 岛 2 6 5 ; . 津 大 学 机械 学院 , i 6 55 2 天 足津 3 ( 7 0) 2) 0
RA M
统 的整合 和模 块 问 的 协调 。在 嵌 入 式 实 时操 作 系统
种具 有较 强针 对 性 、 集 功 能 较 强 、 带 方 便 的数 采 携
据 采 集系 统 。该 系 统在 满 足功能 要 求 的 同时 , 本将 成 远 低 于基 于 业 计算 机 的便 携式 数 据采 集 系统 , [ 有较
好 的性 价 比
C 0 1 0 0器件 是 完 全 集 成 的混 合 信 号 系 统 级 85 F 2
AD 带 P 和模 拟 多路 J 关 。 C, (A t :
控 制 芯片 C 0 1 0 0的单 片 机 主 板 , 外 扩 的局 部 8 5F 2 在
总线 基础 上加 入 自己设 计 的通 讯 、 机 接 口板 、 人 可程
控增 益抗 混 滤 波 电路 等 子 模 块 , 块 化 地 构 建 该 系 模 统 。可 以分别 调试 单 个 模 块 , 断 完善 其 功 能 , 不 全部
摘要 : 对嵌入 式数据 采 集仪 的 整体 结构 进行 了概 述 , 细介 绍 了 系统设 计 过 程 中的 关键 技 术 : 件 调理 电 详 硬
路、 网络模 块及 软件 模 块 的设计 , 并在设 计 过程 中确 立 了模 块化 和层 次化 的思想 。
关键 词 : 8 5 F 2 ; 入 式 系统 ; 据 采集 仪 ; c os 1 C O 1 00 嵌 数 u 统结 构 框 图 , - 警 l为 1
下面对系统的一些重要组成 部分进行介绍 。
皇 匡 £ 值遒
. ..
其 中最常 见的是机 械 振 动信 号 , 多 机 械 故 障通 过异 许 常 的机 械振动反 映 出来 。所 以通 过采集 机器 的振 动数 据来 检测机械 的运 动状 态并判 断其 是否运行 正常具 有
维普资讯
第 1 第 4期 9卷 20 0 6年 1 2月
音 职硅 鸟 技术 学报 学
J u n l fQig a c t n la d Te h ia l g o r a n d o Vo a i a n c n c lCol e o o e
( 达 2 MI S 。 可 5 P )
己的功 能 , MI S MC 的 控 制 下 , 成 整 个 系 统 在 P U 完
的功 能 。采用 白行设 计 的基 于 Sl o ic n公 司的 8位微 i
2 全速 、 . 非侵 入 式 的在 系统 蒯试接 口( 内 ) 片 。 3真正 1 . 2位 (;0 1 )0 、 0 k p ( 5 2 ) l0 s s的 8信 道 8
MC 芯 片 , 有 6 U 具 4个 数 字 I( 引 脚 。下 面 列 出 了 /)
一
本 系统 采 用 模 块 化 的设 计 思 想 , 嵌 入 式 u / 在 C OS 1实 时操作 系 统 的控 制 下 , 个 任 务 模块 实 现 自 一1 每
些 主 要特性 :
1 高速 、 . 流水 线结 构 的 8 5 兼容 的 C P 5 』核 0 I I - 1【 、 J