基于S3C2440多路A_D转换Linux驱动程序设计
linux在TQ2440上移植6--完善串口驱动
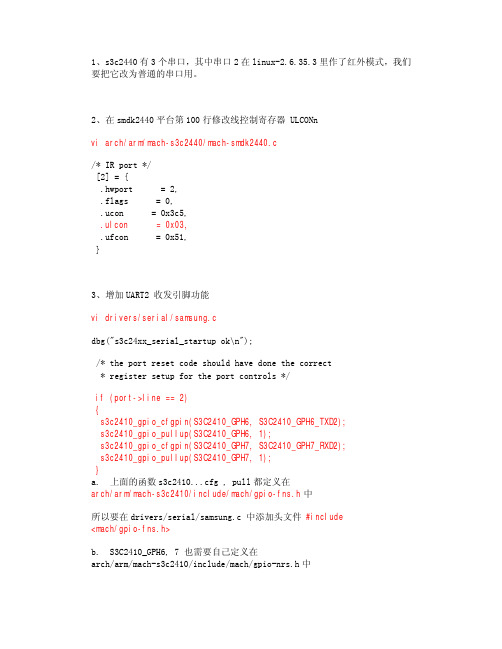
1、s3c2440有3个串口,其中串口2在linux-2.6.35.3里作了红外模式,我们要把它改为普通的串口用。
2、在smdk2440平台第100行修改线控制寄存器 ULCONnvi arch/arm/mach-s3c2440/mach-smdk2440.c/* IR port */[2] = {.hwport = 2,.flags = 0,.ucon = 0x3c5,.ulcon = 0x03,.ufcon = 0x51,}3、增加UART2 收发引脚功能vi drivers/serial/samsung.cdbg("s3c24xx_serial_startup ok\n");/* the port reset code should have done the correct* register setup for the port controls */if (port->line == 2){s3c2410_gpio_cfgpin(S3C2410_GPH6, S3C2410_GPH6_TXD2);s3c2410_gpio_pullup(S3C2410_GPH6, 1);s3c2410_gpio_cfgpin(S3C2410_GPH7, S3C2410_GPH7_RXD2); s3c2410_gpio_pullup(S3C2410_GPH7, 1);}a. 上面的函数s3c2410...cfg , pull都定义在arch/arm/mach-s3c2410/include/mach/gpio-fns.h中所以要在drivers/serial/samsung.c 中添加头文件 #include<mach/gpio-fns.h>b. S3C2410_GPH6, 7 也需要自己定义在arch/arm/mach-s3c2410/include/mach/gpio-nrs.h中#define S3C2410_GPH6 S3C2410_GPH(6)#define S3C2410_GPH7 S3C2410_GPH(7)同样也要在drivers/serial/samsung.c 中添加头文件 #include<mach/gpio-nrs.h>c. S3C2410_GPH6_TXD2S3C2410_GPH7_RXD2定义在arch/arm/mach-s3c2410/include/mach/regs-gpio.h同样也要在drivers/serial/samsung.c 中添加头文件 #include<mach/regs-gpio.h>4、下面还有一个重要的数据结构第889行static struct uart_driver s3c24xx_uart_drv = {.owner = THIS_MODULE,.dev_name = "s3c2410_serial", //这个是串口设备的名称,必须和文件系统的inittab里控制台的名称相对应.nr = CONFIG_SERIAL_SAMSUNG_UARTS,.cons = S3C24XX_SERIAL_CONSOLE,.driver_name = S3C24XX_SERIAL_NAME,.major = S3C24XX_SERIAL_MAJOR,.minor = S3C24XX_SERIAL_MINOR,};5、make menuconfigDdvices Drivers --->Character devices --->Serial Drivers --->1、s3c2440有3个串口,其中串口2在linux-2.6.35.3里作了红外模式,我们要把它改为普通的串口用。
Jflash-s3c2410(linux 版本)源码分析
Jflash-s3c2410(linux 版本)源码分析最近在远峰公司买了arm9的板子,S3C2410,ARM920T ,没有Nor flash ,Nand Flash 是64M ,SDRAM 是K9f1208,本人对linux 的热情大于windows ,所以想在linux 下做开发,可是远峰公司只给我YFSJF.exe 文件,而且没有源代码,每次在linux 下编译好了后还得切换到windows 下烧录,很是麻烦,于是在网上找了很多Jflash 类似的程序,不过不同的烧录针对不同的硬件平台,Jflash 是跟硬件紧密结合的,比如有的针对Nor Flash ,有的针对Nand Flash 的,不同内核有不同的Jflash ,而且相同的内核也有不同的版本,因为Jtag 的原理图不同,就只能有相对应的Jflash ,程序中的定义要与pc 机并口与Jtag 接口的对应相一致。
在进入源码分析之前要介绍一些预备的知识,有助于理解源代码,毕竟这个程序和硬件联系很紧密的。
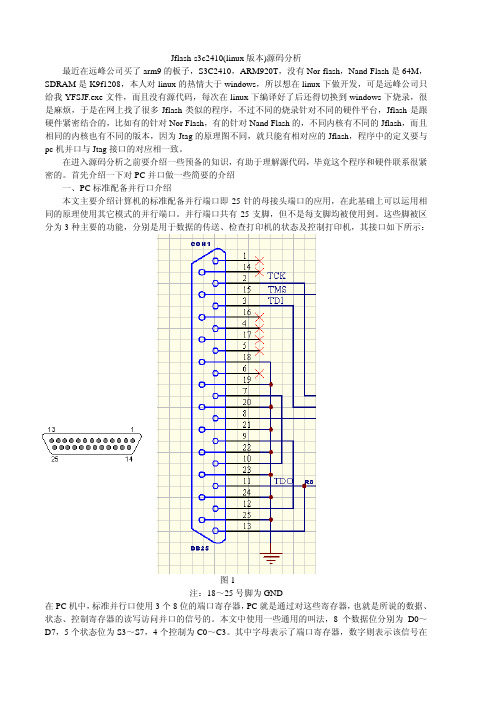
首先介绍一下对PC 并口做一些简要的介绍一、PC 标准配备并行口介绍本文主要介绍计算机的标准配备并行端口即25针的母接头端口的应用,在此基础上可以运用相同的原理使用其它模式的并行端口。
并行端口共有25支脚,但不是每支脚均被使用到。
这些脚被区图1分为3种主要的功能,分别是用于数据的传送、检查打印机的状态及控制打印机,其接口如下所示:注:18~脚为GND在PC 机中,标准并行口使用3个8位对这些寄存器,也就是所说的数据、25号的端口寄存器,PC 就是通过状态、控制寄存器的读写访问并口的信号的。
本文中使用一些通用的叫法,8个数据位分别为D0~D7,5个状态位为S3~S7,4个控制为C0~C3。
其中字母表示了端口寄存器,数字则表示该信号在寄存器中的位。
数据寄存器据端口或称数据寄存器(D0~D7)保存了写入数据输出端口的一字节信息。
数据端口可以写入数数据寄存器(即数据输出端口)可擦写、基地址数据,也可以读出数据(即可擦写);写进去的当然是我们希望从数据端口引脚输出的数据,不过读进来的也只是我们上次写进去的数据,或是原来保留在里面的数据,并不是从端口引脚输入PC 的数据。
基于S3C2440的Bootloader的分析与设计
基 本功 能 , 而 是把 b o o t l o a d e r 看作 是 一 个虚 拟 的 小 系统 ,让 其 对硬 件 板 级 系统 有 更 多的 支持 以为 系统 开 发 者 提供 方 便 。 关 键 词 :B o o t l o a d e r ; S 3 C 2 4 4 0 ; U b o o t
一
们将 b o o t l o a d e r 分 为 两 个 阶 段 :阶 段 l 和阶段 2 。分 为 两 个
阶段的原因是因为:( 1 )基于编程语言 的考虑 。阶段 1 用主 要用汇编语言,它主要进行与 C P U 核 以及存储设备密切相 关的处理工作,进行一些必要的初 始化工作,是一些依赖于 C P U 体 系结构的代码 ,为 了增加效 率以及 因为涉 及到协处 理器的设置,只 能用汇编编写 ,这部分直接在 F L AS H 中执 行 ;阶段 2用 一般 的 c语言 ,来实现一般 的流程 以及对板
Ke y wo r d s : Bo o t l o a d e r ; ¥ 3 C2 4 4 0 ; Ub o o t
0 引 言
B o o t l o a d e r( 引 导 加 载 程 序 )就 是在 操 作 系 统 内核 运 行 之 前 运 行 的 一段 小程 序 。通 过 这 段 小 程 序 , 我 们 可 以初 始 化
Ab s t r a c t : Bymo d i f y i n gt h eU— b o o t . 1 . 1 . 6v e r s i o n o ft h e s o u r c e c o d e , t h e d e s i g n a n di mp l e me n t a t i o n o f NAND F l a s h a n dNOR F l a s h f r o m t wo t o s t a r t t h e e mb e d d e d Bo o t l o a d e r , a n d p o  ̄e d t o t h e e mb e d d e d s y s t e m o n¥ 3 C2 4 4 0 mi c r o p r o c e s s o r . i n t h i s p a p e r , t h e d e s i g n o f b o o t l o a d e r t o a c h i e v e t h e b o o t l o a d e r o n l y p l a y e d t h e b a s i c i f mc t i o n t o l o a d t h e k e me l i ma g e , b u t t h e b o o t l o a d e r a s a v i r t u a l s y s t e m, ma k e i t s h a v e mo r e s u p p o t r f o r s y s t e m d e v e l o p e r s t o p r o v i d e c o n v e n i e n t or f h a r d wa r e b o a r d l e v e l s y s t e m.
基于S3C2440嵌入式Linux的伺服电机控制

t c f g 0 1 = ( 5 0 -1 ) ; / / 设 置预 分频 率为 5 0
赫 兹
t c f gl &= ̄ S3 C2 4 1 o _ TCFGI _ _ M UX 1 _ M ASK ;
1 . 1 伺 服 电机的 驱动 与控 制 直 流 伺服 电机 速度 由P WM 的 占空 比来 决定 , 占空 比越 大 电机 转 速 越 大 , 设 置
作。
2. 3主 函数
主 函 数 中循 环 检 测 有 无 按 键 按 下 , 并
2 详细设计
2 . 1 P W M 驱 动
判 断是 哪个 按 键 , 调 用i o c t l 函数 调用 各设 备
高 新 技 术
S C I E N C E &T E C H N 0 L O G Y .
墨圆
基于 ¥ 3 C2 4 4 0嵌 入 式 L i n u x的伺 服 电机控 制
刘 亚 茹 王 贵 山
( 国 防科学 技术 大学 机 电工 程 与 自动化学 院 湖南 长沙
4 1 0 0 0 3 )
c md ) ; //设 置 引脚 状态 o u t — t a b l e [ a r g ] 为 需要 设 置状态 的 引脚 ,
主 函数 主 要 完 成 的 工 作 为 检 测 判 断 按 图 1 嵌入式 L i n u x 的硬件设备驱动过程
下的按键 , 并 调用相应的i o c t l 函数 进 行 操 c md 为 状 态值 。
摘 要: 介 绍一 种基 于¥ 3 C2 4 4 0 微 处理 器 的伺服 电机控 制 方案 。 AR M微 处理 器几乎 已经 深入 到工 业控 制 、 无 线通 讯 、 网络 应 用、 消 费类 电子 产品 , 威像 和安 全 产品各个 领 域 。 本文 实现 基于¥ 3 C 2 4 4 0 的L i f l U X 的 伺服 电机 的按键 控 制 , 控 制 伺服 电机转 动方 向及速 度 , 并通 过 L ED指示 灯 . 蜂 鸣 器等表 征 伺服 电机 的工 作状 态 。 关键 词 : AR M ¥ 3 C 2 4 4 0 L i n u x 伺服 电机 中图分类 号 : T P 2 7 4 文献标识码 : A 文 章编 号 : I 6 7 2 — 3 7 9 I ( 2 o I 3 ) 1 0 ( a ) 一0 0 0 7 — 0 I
基于S3C2440的Bootloader设计与实现
其中, 引导加载程序就是 B ola e , o t d r 它是嵌入 式系统开 o 发的难点之 一 , 同时也是嵌入 式系统 运行 的一个基 本前
图 1 系统硬 件结构 图
3 B ola e 总体 分析 ot d r o
构, 还依 赖具体 的板级硬件配 置 , 也就 是说 , 对于两块不 同的嵌入式 系统 板而言 , 即使 采用相 同的 CP , 它们的 U
收稿 日期 : 1 —0 —1 2 00 3 8
自 化 与 用》00 第2卷 期 动 技术 应 21年 9 第7
l 引 言
随着嵌入 式技术 的发展 , 嵌人 式系统 的应用 也越来
越广泛 , l 纪被称 为是 “ PC时代” 嵌入 式系统 已 2 世 后 , 经渗 透到 了人 们 日常 生活 中的方 方面 面 。 而在 嵌入 式
系统设 计 中 , 尤为 重要 的就是 引导程 序 的设计 。
嵌 入式 系统从软 件操作 方面分 析 , 般分 为四个层 一
计 算 机 应 用
Compu erAp iat ns t pl i c o
自动 化 技 术 与 应 用 2 1 0 0年 第 2 9卷 第 7期
基 于 S C 4 0的 B o l a e 设计 与 实现 3 24 o t d r o
田 会 峰
( 苏科技大学张家港校 区信息学 院 , 江 江苏 张家港 2 6 0 0) 1 5
2 系统 硬 件 结构
本 系统采用的是广 州友善之臂科技公司的 Mii4 0 n2 4
开发板。它采用了 S m u g的 ¥ C 4 0 a sn 3 24 A处理器 , 其主频 达到了 4 0 z还包括 6 M 的 S R M 和 18 的Na d 0MH , 4 D A 2M n
基于S3C2440-Linux的视频传输系统设计

中图分类号 :T 36 1 P 1. 8
文献标识码 :A
文章编号 :10 — 59( 02 卜0 4— 2 0 7 99 2 1 )0 11 0
De i n o d o Tr n m iso y tm s d o 3 4 0 Li u sg f Vi e a s s i n S se Ba e n S C2 4 一 n x
( )A M L n x 境搭 建 二 R — iu 环 本 为 1n x2 63. 。下 载好 内核 iu 一 ..0 9 后 , 改 内核 中 Mk f l 文件 , 修 a ei e 使之 适应 ¥C 40需要 。然 后在 3 24 终 端 环 境 下 重 新 配 置 内 核 , 本 系 统 中 配 置 内 核 采 用 m k ae m n cn i 。配 置好 内核 后重 新编 译 内核 即可 。 eu of g ( )视 频采 集模 块 三 本 部分 的实现主要用 到一个协 议 ,叫作 vdofrlnx简称 ie o iu VL 4 ,现在发 展到 VL ,是 lnx影像 系统与嵌入 式影像 的基础 , 42 iu 是 lnx en l里 支持影像 设备 的一 组 A I它 方便 的为驱动层和 iu re K P, 用户 层提供接 口函数 , 以便我们 可 以调用 就可 以操 作相应 的硬件 。 L nx系统 中,视频设备被 当做一 个设备文件 来看待 ,设备文 iu 件存 放在/ e 目录 下,我这个 视频设备 查询获得 为 : d vv do dv / e/ ie O (R 板下 为 /e/ ie 1。 AM dv vdo )操作这个 设备其实和 写字符 驱动 函数 很相 似 ,但 不一样 ,因为采集 视频过程要 遵循这个 协议 , 采 集视 频流 程大 致为 :打 开视频 设 备 ,设置视 频 设备属 性 以 及 采集 方式 、视 频数据 处 理 ,关 闭视 频 设备 。具体 操作 如下 : 1用非 阻塞 模式 打开 摄像 头设备 .
基于S3C2440A的网络流媒体播放终端设计
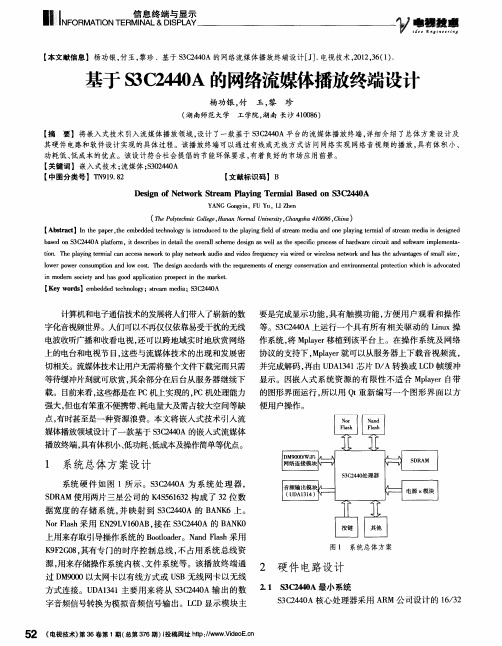
K FG 8 9 2 0 。这 样 ¥ C 40 就 和 外 部 的 时 钟 电 路 及 问 D 90 3 24 A M 00内部存储器 。本设计 中 D 90 ¥C 40 M 00与 3 24A处 S R M, o l h和 N n ls D A Nr a Fs adFah存储设备组成 sC 40 理器的连接如图 2所示。 3 24 A
嵌 入式流媒 体播 放 终端 网络接 口部 分 是必 不 可 少 的, 该播放终端 可以通过有线 的以太 网卡 D 00或 U B M90 S
D 90 是 D V C M 公 司 生 产 的 一 款 1/0 M 00 E IO 0 10
集成 有 I 。 频 编解码 接 口、 C s音 L D接 E、 D A 内存 控 Wii lS R M F 无线 网卡访问网络。 制器 、 a dFah控制 器 、 S N n l s U B控 制器 、 D A C及触 摸屏 接 口等 。工作 主 频 一 般 为 4 0MH , 高 可 达 5 3MH 。 ( bt S ) 0 z最 3 z M i ・ 快速以太 网卡控制芯 片, 它实现 了以太 网媒
【 关键词】嵌入式技术; 流媒体; 040 ¥ 24 A 3 【 中图分类号】T 998 N 1.2
【 文献标识码】B
De i n o t r S r a Pl y ng Te mi lBa e l¥ sg fNe wo k t e m a i r a s d Oi 3C2 0 44 A
系统 硬 件 如 图 1所 示。¥ C 40 3 24 A为 系 统处 理 器 ,
Байду номын сангаас
S R M使用两片三星公 司的 K S 662构 成 了 3 DA 4 5 13 2位数 据 宽度 的存 储 系统 , 映射 到 ¥ C 40 并 3 24 A的 B N 6上。 AK N r l h采 用 E 2L 10 B 接在 ¥ C 40 o a Fs N9V 6A , 3 24 A的 B N 0 A K
基于S3C2440A的MIDI音乐播放器的设计
计 算 机 与 现 代 化 J I S U A N J I Y U X I A N D A I HU A
总第 2 1 4期
基于 ¥ 3 C 2 4 4 0 A 的 MI D I 音 乐 播 放 器 的设 计
Ke y wor ds:¥3 C24 4 0A ;M I DI pl a y e r ;t o u c h s c r e e n;s c o r e
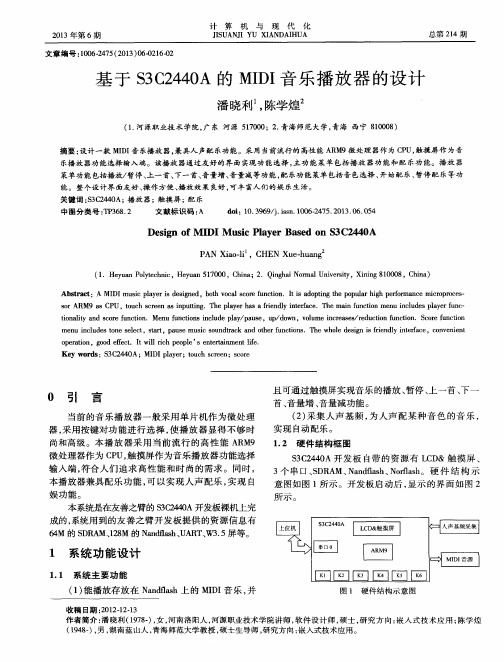
0 引 言
当前 的音 乐播 放 器 一 般采 用 单 片 机作 为 微处 理 器, 采用按 键对 功 能 进行 选 择 , 使 播 放 器 显 得不 够 时
Ab s t r a c t :A MI DI mu s i c p l a y e r i s d e s i g n e d,b o t h v o c a l s c o r e f u n c t i o n .I t i s a d o p t i n g t h e p o p u l a r h i g h p e r f o r ma n c e mi c r o p r o c e s — s o r AR M9 a s C P U ,t o u c h s c r e e n a s i n p u t t i n g .T h e p l a y e r h a s a f i r e n d l y i n t e r f a c e .T h e ma i n f u n c t i o n me n u i n c l u d e s p l a y e r f u n e — t i o n li a t y a n d s c o r e f u n c t i o n .Me n u f u n c t i o n s i n c l u d e p l a y / p a u s e,u p / d o wn ,v o l u me i n c r e a s e s / r e d u c t i o n f u n c t i o n .S c o r e f u n c t i o n
基于S3C2440嵌入式Linux的伺服电机控制

基于S3C2440嵌入式Linux的伺服电机控制摘要:介绍一种基于S3C2440微处理器的伺服电机控制方案。
ARM微处理器几乎已经深入到工业控制、无线通讯、网络应用、消费类电子产品、成像和安全产品各个领域。
本文实现基于S3C2440的Linux的伺服电机的按键控制,控制伺服电机转动方向及速度,并通过LED指示灯、蜂鸣器等表征伺服电机的工作状态。
关键词:ARM S3C2440 Linux 伺服电机Linux操作系统将设备都看成文件,以操作文件的方式访问设备,应用程序不能直接操作硬件,而使用统一的接口函数调用驱动程序,驱动程序位于内核中,一方面完成对底层硬件的控制;另一方面将控制底层硬件的函数以标准文件访问的方式提供给上层应用程序。
因此,对伺服电机的控制需要编写不同模块的驱动程序,再调用执行。
运行程序时将程序在交叉编译环境下编译,将可执行程序移植进ARM运行。
1 总体设计方案按键控制直流伺服电机包括按键检测、电机驱动、状态只是三个主要部分,因此,整体控制也分为三个模块:一是伺服电机的驱动与控制;二是指示灯蜂鸣器等的状态控制;三是主函数检测按键执行相应操作。
1.1 伺服电机的驱动与控制直流伺服电机速度由PWM的占空比来决定,占空比越大电机转速越大,设置PWM占空比可以改变电机转动速度。
编写PWM驱动,设置PWM频率、占空比,在主函数中调用ioctl函数改变占空比。
S3c2440A有5个16位的定时器,这里使用了定时器1,并设置PWM频率为10 kHz。
1.2 LED指示灯和蜂鸣器的控制指示灯和蜂鸣器的控制通过引脚输出高低电平信号进行控制,并且直流电机的方向也是用同样的方式控制。
编写引脚信号输出驱动,在主函数中调用ioctl函数改变各引脚状态。
1.3 主函数主函数主要完成的工作为检测判断按下的按键,并调用相应的ioctl函数进行操作。
2 详细设计2.1 PWM驱动本驱动通过读写寄存器设置PWM工作方式,设置占空比,在主函数通过调用函数传入不同参数设置预期的占空比。
基于S3C2440的触摸屏驱动程序实现
外形 尺寸 :3 8× 5 1× m 9 . 7 . 5 m;
重量 :5 ; 素 :2 ×2 0 4 g像 30 4; 画面 尺寸 :.c 3 8 c )色 彩 :6级灰 度 ; 96 m( .i h ; n 1
基 于 ¥ C 4 0的触 摸 屏 驱 动 程序 实 现 3 24
强新建 田 泽 , , 刘天时
(. 1 西安石 油大 学 计 算机 学 院, 陕西 西 安 7 06 ; . 105 2 西北 大学 信息 科 学与技 术学 院 ,陕西 西安 706 ) 10 8
摘 要: 触摸屏作为人机界面的输入设备被广泛的应用于消费电子、 工业控制等诸 多领域。 目前流行 的
情的输人设备 。利用这种技术 , 我们只要用手指就 能 实现对主机操作 , 使人机交互更为直截 了当, 极大方便 了那些不懂 电脑操作的用户。触摸屏在我 国的应用 范 围非 常 广 阔 : 公共 信 息 的 查 询 , 电信 局 、 务 局 、 如 税 银 行、 电力等部门的业务查询 ; 城市街头 的信息查询 ; 此 外还 可 广 泛应 用 于领 导 办公 、 工业 控 制 、 军事 指 挥 、 电
嵌入 式 A M 处理 器 S( 40是 一款 典 型的嵌 入 式 SC芯 片 , R 32 4 2 o 它提供 了触摸 屏控 制 器接 口, 方便 了嵌入 式
软、 硬件开发。简要介绍了¥ C40处理器 , 324 同时分析 了触摸屏 的硬件 架构、 硬件工作原理及与及其工作 框图, 在此基础上给 出了触摸屏与 SC 40的硬件连接 电路 图。介绍了S C40下触摸屏的 WiC 3 24 324 n E驱动
基于S3C2440的EtherCAT智能从站设计

Ke o d : t eC T; n u t a Eten t rtc l d l cmX;L n x . 2 4 yw r s E h r A id sr h re ;poo o mo ue o i l iu ;S C 4 0 3
曹 晶, 方康玲 , 汉 4 08 ) 30 1
摘 要: 由于现 场总 线标准 不统一 , 各种现 场总线 协议 之 间实 现通信 比较 困难 。 以太 网技术 由于其 标 准统 一 , 以太 网技 把
术和 现场 总线技 术相结 合是 当前工 业 网络技 术 发 展 的新 趋势 。德 国倍 福公 司提 出 的 EhrA t C T工 业 以太 网 拓 扑结 构 灵 e 活、 系统 配 置简单 、 发成 本低 , 具有 高效 高速 率 的特 点 , 开 更 得到 了越来 越 多 网络 工业 设 备开 发 商 的关 注。在 研究 Ehr t — e
De i n o he CAT nt li e tS a e Ba e n ¥ sg f Et r I elg n l v s d o 3C2 4 4 0
CAO ig,F Jn ANG g l g I Kml—i ,L AO a —h n Hu n z u
( ol eo f mai c ne n n ier g Wu a i. f i c dT cnlg , u a 30 1 C ia C lg f no t nSi c dE g ei , hnUnv o e ea eh o y W h n4 0 8 , hn) e I r o e a n n c S n n o
Absr c : h tn a do ed U o nfe ta t Astesa d r ff lb Si n tu iid.c mmu ct nb t e ifrn ilb spoo osi fiut i s o ni i ewe ndfee tfed u rtc l di c l.Th tn ado h- ao s f esa d r f Et e e e h oo y i u iid o i o tn h m e eh oo y it h il fid sra o to n h n itg aig teEte ta d m t c n lg s nfe ,s mp rig Et e ttc n lg no te f d o n u tilc nr la d t e n e rtn h h me n t e fed u eh oo y i ten w rn fid sra e o k tc oo y d v lp n tDu oishg e l i ,f xil o oo y,smpe ilb stc n lg h e te d o u ti n t r e h lg eeo me . et ih ra —tme l bet p lg s n l w n t e i l
基于S3C2440A的大容量NANDFLASH的设计应用
随着嵌入式系统 应用 领域 的不 断扩 大 , 系统 复杂 性也 在 不 断提高 。F A H存储 器 由于具 有存储 容 量大 、 电数据 不 LS 掉
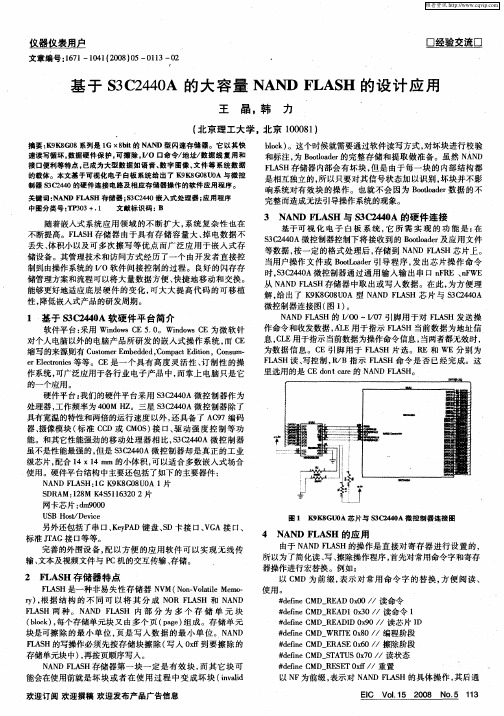
3 N D l AS 与 s l0 的硬件 连接 AN i H ' L 3 4A
基 于可 视 化 电子 白板 系 统 , 所 需 实 现 的 功 能 是 : 它 在
里 选 用 的 是 C o t a E dn r N N L S c e的 A DF H。 A
1 基于 s C 4O 3 24 A软硬 件 平台简 介
软件平台 : 采用 Widw E 5 0 no s针 d
对个人 电脑 以外 的电脑 产品所研 发 的嵌 入式操作 系统 , C 而 E
S G40 3 24 A微控制器控制下将 接收到 的 B oodr o fae 及应用 文件 l 等数据 , 一定 的格 式处理后 , 按 存储 到 N N L S A D F H芯片上 。 A 当用户操作 文 件或 Bo odr ot ae 引导程 序 , 出芯 片操作 命 令 L 发 时 ,3 24 A微控制器通 过通用 输入输 出串 口 n R 、 F ¥C40 F E n WE 从 N DF S AN L H存储 器 中取 出或 写入数据 。在 此 , A 为方便 理 解 , 出了 K K G 8 O 型 N N L S 芯片 与 S C 4 0 给 g 8 0U A A DF H A 3 24 A 微控制器连接图 ( 1 。 图 ) N N L S 的 IO A DF H A / 0—10 / 7引脚用 于对 F S 发送操 A L H 作命令和收发数据 ,L A E用 于指示 F S 当前数据 为地址信 A L H 息 ,L C E用于指示 当前数据为操作命令信息 , 当两者都无效时 , 为数据 信息 。C E引脚 用于 F S A L H片 选。R E和 WE分 别为 F S A L H读 、 写控制 , / R B指示 F S A L H命 令是 否 已经完 成。这
基于S3C2440的LXI总线高速数据采集模块的设计

A /D c n e t r F F s h a h e o y 8 C 4 0 a h a n p o e s r P D a o p o e s r t e l z h o v r e , I O a t e c c e m m r , 3 2 4 s t e m i r c s o ,C L s a c — r c s o o r a i e t e
具体 的数据采 集控制过程可 以分 为以下步骤 : ( )系统 的初始化 : i aFF . I O复位控制 :I T 2 7在使用前需复位 ,其低 电平 D 70 复位最 小时间需大于 2 n , 5 s 写入数据 O O O H时, I O复位 xOO FF
信 号 变 为低 电 平 , 复 位 F F ;¥ C 4 0内部 程 序 延 迟 一 段 时 IO 3 2 4
将 I T 2 7数 据 输 出 到 ¥ C 4 0的数 据 总 线 L A A 5 D70 32 4 D T I  ̄
LAA D T O上 去 。
开 始
成的 以太 网控制模块 , 需要一个 与之 匹配 的 D 9 0 M 0 0控制芯片
差 分 输 入 或 者 单 端 输 入 ,而 且 可 以 灵 活 的选 择 输 入 范 围 和 偏
移 。该 A D芯片 的采集速 率可 以向下兼容, 过改变其输入采 通 样 时钟的频率既可 以实现其极 限速 率的高速 采样也可 以进行 低 速的采样 ,所 以选择 A 9 2 以保证采样速度 的灵活性 。 D 2 4可
IT 2 7输 出/ F的 半满 信 号 ,并 在 C L D70 H P D内 部产 生 ¥ C 4 0 324 中 断 请 求 信 号 IQ A 。 R_ D ( )响 应 中 断 及 查 询 中断 源 :¥C 4 0响 应 中 断 后 ,当 5 324 nC 5 为 低 ,地 址 为 中 断源 查询 地址 时 , 读 取 数 据 总 线 上 对 GS 应 的 数 据 位 来 查 询 中断 源 。 ( ) 读 取 数 据 : 若 ¥ C 4 0查 询 到 的 是 F F 生 的半 6 324 IO产 满 ( H )信 号产 生 的 中 断 请 求 ,则 即 将 n C 5为 低 ,地 址 为 /F GS
基于S3C2440的多道脉冲幅度分析器硬件设计
El e c t r o n i c S c i .& Te c h . /Aug . 1 5. 2 01 3
基于 ¥ 3 C 2 4 4 0的 多 道 脉 冲 幅 度 分 析 器 硬 件 设 计
王胜 芹,龚学余
( 南华大学 核技术学院 ,湖南 衡 阳
Ab s t r a c t Th e t r a d i t i o n a l mu l t i - - c h a n n e l p u l s e a mp l i t u d e a n a l y z e r b a s e d o n s i n g l e c h i p c o mp u t e r wi t h l o w i n t e . - g r a t i o n i s d i ic f u l t t o d e s i g n o r u p d a t e . A mu l t i — c h a n n e l p u l s e a mp l i t u d e a n a l y z e r b a s e d o n 3 2 b i t s mi c r o c o n t r o l l e r
¥ 3 e 2 4 4 0 i s p r o p o s e d i n t h i s p a p e r .T h e ma j o r c i r c u i t c o mp o n e n t s a r e d e s c r i b e d i n c l u d i n g t h e p u l s e d i s c r i mi n a t o r c i r —
关 键 词 多道 脉 冲 幅 度 分 析 器 ;¥ 3 C 2 4 4 0 ;峰 值 检 测
基于ARM—Linux和S3C2440的嵌入式Linux内核设计
嵌入式操作系统方面, 前 比较流行 的几个嵌入式操 目
作 系统 是 L n x W i d wsC Vx r s am iu 、 n o E、 Wo k 、P l 0S
S R M 芯片作为内存; D A 具有6 MB N ND Fah 4 A l  ̄ s
56
中闽 饭嚣{表 C I I TU ET I 氧 H AN R M NA O N S TN
2 1 年 第3 00 期
T C NI A X L A I N f E H C LE P OR T O 技术探讨
可靠性、 本、 积、 成 体 功耗严格 要求的专用计 算机系
统 。 建 嵌 入 式 系统 需要 从 两 个方 面进 行 选 型 , 是 构 一 硬 件 平 台的选 择 , 是 嵌入 式 操 作 系统 的选 择 。 二 硬 件 平 台 的 选 择 包 括 处 理 器 以 及 相 关 芯 片 的
2软硬件环境构建
本设计采用主机与 目 标板结合的交叉开发模式,
如 图1 示 。 所
主 机 自然 指 P C机 ,目标 板  ̄ ¥ C2 4 开 发 板 。 3 40 开
发板采用¥ C 4 0 作为C U; 3 2 4A P 两片总共6 M ye 的 4 b ts
国家8 3 划项 目的资助 ( 目编号 : 6计 项 NO.0 8 0 Z 0 ) 2 0 AA 1 1 4
De i fEm b d e i u er e s d sgn o e d d Ln x K n l Ba e o n ARM . iu d S3 4 Ln x an C2 40
基于S3C2440和Linux的无线拨号上网终端

4 0MH , 且 其 内部 集 成 了 L D控 制 器 、 0 z而 C 内存 控 制
器 、 l h接 口电路 以及 双 通道 的 U B总线 , 理 器 也 Fa s S 处 支持 Ln x 作 系统 , Ln X iu 操 而 i 操作 系统 也 拥有 现代 操 u 作 系统 所 具 备 的 内容 : 先 式 多任 务 处理 、 抢 内存 保 护 、 虚拟 内 存 ¨ 并 支 持 T P I C / P的众 多 协 议 。因 此 , 它 将 们 用 于无 线拨 号 上 网终 端 中时 , 以利 用 A M9低 功 可 R 耗, 高性 能 的特 点 和 Ln x良好 的 网络 支 持 功 能 完 成 iu
网终 端在 各个 领域 有着 广泛 的应 用空 间 。例 如在 视 频 监控 方 面 , 合无 线 网络技 术 , 监 控 的方 式 更加 多 元 结 使
通 过硬 件转 化 为 U B接 口 , 样 不 仅 方便 3 S 这 G模 块 与 核 心板 的连 接 , 而且也 方便 了对 3 G模块 在 Lnx系 统 iu
Ab t a t Ta i g¥ 4 0 a d L n xa h ltom , t i a e e in n mpe n sawi ls il g u sr c kn 3 C2 4 n i u st ep afr hsp p rd sg sa d i lme t r e sd ai — p e n
拨号 上 网 和进一 步 的具体 应用 。
2 软 件 平 台
2 1 P 机软件 平 台 . C
系统 软件 平 台 以 Ln x 作 系统 为基 础 , P iu 操 在 C机
上安 装 虚拟机 , 后在 V aeWokt in上安 装 R d 然 Mw r rs t ao e h t nepi , 核 采 用 Ln x一2 6 3 . , 后 在 a E trr e5 内 s iu . .2 2 然 R dh t e a 5的 Ln x上 建立 A M —Ln x—gc的交 叉 编 iu R i u c
基于S3C2440A的时统终端系统的设计

个定时器数据 , 么两 次差就是 脉冲的宽度 , 那 然后再 根据 D C
第 7期
佟刚等 : 基于 ¥ C 4 0 3 2 4 A的时统终端系统的设计
4 3
码的编码协议解调 出相 应的时间信息。
8m s 2I s n 8I s l l I G— —————— — RI B H— ————一
De i n o me Un f d a d Te mi a y t m s d o ¥ 4 0 sg fTi i e n r n lS se Ba e n 3 i C2 4 A
T ONG Ga g CU n n , I Mi g
( h n c u s tt o ts Fn ca is n h s s C a gh n10 3 , hn ) C a gh nI t u f i ,ieMeh nc d P yi , h n c u 30 3 C ia ni e Op c a c
D C码为 10H 脉 宽调 制信号 , 0 z 波形 如 图 1所示 。脉宽 8
m 的脉冲代 表组合划 分参考码 元 ; s 脉宽 5m 的脉冲代表 二进 s
制“ ” 脉宽 2ms 1; 的脉冲代表二进制 … 和码元索 引标志 。 0’ 输入 D C码经光耦接 口电路接 入 F G 由 ¥ C 4 0 P A, 3 2 4 A选择
基于S3C2440的车载影音系统设计

平 台核 心 ,AR 系列 具 有 良好 的性 能 ,能够 流 畅 M9
的进 行 音 乐 、视 频 的播 放 ,其 低 功 耗 性 也能 为车
载 平 台提 供 良好 的续 航 能 力 。 由于 要 用 于视 频播 放 ,所 以 需要 一 个 相 对 较 为 宽 大 的 屏 幕 ,我 们 将 用 户的 输入 设 备定 位 为触摸 屏 ,决定 选 取4 0 素 8像
2 2 素 的触摸 屏 ,综 合 以上 条 件 选取 T 4 0 7像 Q2 4 平
1 )影音 基本 功 能 部分 ,此部 分为 音 乐播放 、
视 频播 放两 个模 块 ;
台 为开 发 硬 件 载 体 。在 倒 车视 频 方 面 ,为 了具 有
更 好 的通 用 性 ,方便 用 户 更换 ,选 取 市 场 常 见 的
劳定 时报警等特色 功能 ,此 外还包括 电子书阅读和 电子相册等附 属功能 。该 系统具有功能人
性化 、用户界面美观等特色 ,拥有广阔的应用前景。
关 键 词 :¥ C24 ;车 载 影 音 ;倒 车 监 控 ;定 时 报 警 3 40 中 图分 类 号 :T 3 P1 1 文献 标 识 码 :B
Do : . 9 9 i s n 1 0 -0 3 . 0 1 2 i 1 3 6 / . s . 0 9 1 4 2 1 . (E) 4 0 i .5
文 章 编 号 :1 0 — 1 4 2 1 ) ( ) 1 9 5 9 0 ( 0 2 上 一0 3—0 0 3 1
0 引言
车载 影 音 设 备 从 各 个 方 面 进 行 了 改进 ,功 能 上 出 来 常 见 的影 音 播 放 外 ,增 加 了 实 用性 很 强 的倒 车 视 频 监 控 功 能 以及 防疲 劳 驾驶 的定 时 报 警 功 能 , 另 外 还 增 加 了 电 子 书 阅 读 和 电 子 相 册 等 附 属 功
基于S3C2440的煤矿井下多协议转换器的设计
心。本文设计了一种煤矿井下使用 的多协议转换 器, 系统采 用嵌入 式 技术 实 现 多种 现场 通 信协 议 的 转 换 , 将 R 22 R 45 T P I、 D U 、 A 可 S 3 、 S 8 、 C /P MO B S C N 等协议相互进行转换 , 实现各监测监控系统信息数 据无缝 传输 , 接人 环 网交 换机 , 各设备状 态及参 并 将 数及 时传输 到集 中监控 处进行 集 中控 制 。
Ab t c : sr t a De in mi i g mut p oo o c n e e a e o ¥ 2 4 sg a n n l — rt c l o v  ̄ r b s d n 3 4 0, t c n e ig t e i C o o v n n h man t a isr m o e f
De in o l— r t c l n e t rB s d o ¥ 2 4 o a n sg fMut p o o o i Co v r a e n 3 4 0 f rCo l e C Mie
Y ANG An,L ANG e,C I Zh AO e g- a Zh n gu n
a r e n u h a h 2 2,RS 8 g e me t c st e RS 3 s 4 5,T P I C / P,MOD S,C BU AN , O t a h r i a o l n s g a d f r n S h t e o gn l a e u i i e e t t i c mi n f p oo o o mo i r te mo i r g s se o h e mls r n f r o f r t n d t n c e s t h t e n t r tc l n t h n ti y tm f t e s a e s t s fi o mai a a a d a c s o t e E h r e t o on a e n o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
加载驱动程序模块:#insmod adc.o
术 驱动程序一旦加载进内核就会作为内核的一部分, 所以驱
动会直接影响内核运行的稳定性,另外,应用程序要想能够使用
创 驱动程序来访问具体的硬件设备还应使用 mknod 命令来动态
增加设备结点, 命令行如下 (A/D 驱动程序的主设备号是 120):
(上海理工大学医疗器械与食品学院)黄 建 明 刘 宝 林 徐 秀 林
HUANG Jian-Ming LIU Bao-Lin XU Xiu-Lin
摘要: 嵌 入 式 操 作 系 统 ARM-Linux 的 应 用 已 经 越 来 越 广 泛 , 但 是 Linux 系 统 本 身 并 没 有 对 种 类 繁 多 的 硬 件 设 备 都 提 供 现 成
黄建明: 在读研究生
- 110 - 120 元 / 年 邮局订阅号:82-946
图 1 驱动程序流程图 《现场总线技术应用 200 例》
您的论文得到两院院士关注
嵌 入 式 与 SOC
本驱动程序的工作流程如图 1 所示,主要由以下 3 大模块 组成。
2.1 初始化和结束程序 在驱动程序设计中通常通过使用 __init 和 __exit 声明来 定义用户自己的初始化函数和清除函数, 然后使用 module_init (mydev_int)和 module_exit(mydev_cleanup)来完成设备驱动程序 的 注 册和 卸 载 (其 mydev_init 和 mydev_cleanup 函 数 即 为 用 __init 和 __exit 声明的初始化函数和清除函数)。在本驱动程序 中初始化函数 adc_init()主要完成一些初始化的工作,包括对硬 件设备的初始化、中断的注册、设备的注册等,初始化部分仅在 驱动程序初始化的时候被调用一次, 而缷载函数则完成相反的 功能。 2.2 服务于 I/O 请求的函数 在系统内部,I/O 设备的存取是通过一组固定的入口点完 成与外部的通信,这些入口点通过一个 file_operations 数据结构 在注册设备文件时与外部调用函数关联起来, 它是字符设备驱 动程序的核心,结构中的每个成员名字都对应着一个系统调用。 该结构实际就是声明了针对各种设备不同操作的函数指针, Linux 下驱动程序的大部分工作,实际上就是完成上述各种操作 方法的函数。但是实际的驱动程序中并不需要为每一个操作都 编写相应的实现代码,对于不需要的操作,可在初始化 file_oper- ations 结构时在相应的位置赋予空指针 NULL 即可[5]。本驱动 通过调用 open 入口点,为将要进行的 I/O 操作做好准备工作,包 括初始化中断事件变量、设置 AD 转换通道等, 在此通过一个 for 循环来设置 4 个 AD 转换通道, 以实现打开 4 个 AD 通道的 要求; 通过 read 入口点设置 ADCCON 控制寄存器启动 AD 转 换,并设置中断事件变量使程序进入等待转换结束,在中断事件 激活后, 通过 copy_to_user 内核函数将转换结果传送到用户空 间变量指针来完成整个 A/D 转换。 AD 转换大部分过程都是在 adc_read()函数(它为应用程序 系统调用 read 函数时调用的函数)里实现的,它是 AD 转换的主 体函数,在此函数中通过判断通道号实现了多通道 AD 转换,部 分实现代码如下: static ssize_t adc_read (struct file *filp, char *buffer, size_t count, loff_t *ppos) {
Байду номын сангаас
的 驱 动 程 序 , 特 别 是 由 于 工 程 应 用 中 的 灵 活 性 就 需 开 发 一 套 适 合 于 自 己 产 品 的 设 备 驱 动 , 这 使 得 嵌 入 式 Linux 设 备 驱 动 程 序
的 开 发 在 整 个 嵌 入 式 系 统 开 发 周 期 中 占 据 很 大 的 比 例 。 本 文 针 对 三 星 的 S3C2440 嵌 入 式 ARM 微 处 理 器 , 介 绍 了 在 Linux 操
嵌 入 式 与 SOC
文 章 编 号 :1008-0570(2011)09-0110-02
《微计算机信息》2011 年第 27 卷第 9 期
基于 S3C2440 多路 A/D 转换 Linux 驱动程序设计
The Linux Driver Programming Based on S3C2440 multi-channel A/D Converter
{ converter_channel=0; } else converter_channel++; adcdev.channel=converter_channel; value = adc_data; … int r = copy_to_user(buffer, str, len);// 将内核空间中的数据 拷贝到用户空间,以供应用程序使用
新 #mknod /dev/adc c 120 2; 在嵌入式终端运行这样的命令后,会
在/dev 目录下生成一个设备结点文件 adc.c 表示字符设备,120 是 A/D 驱动程序的主设备号,是在驱动程序中指定的。驱动程 序就是通过主设备号和文件系统中的设备结点联系起来的,这 样应用程序就可以通过该设备结点来调用驱动程序以达到读、 写和控制硬件的目的。
START_ADC_AIN(adcdev.channel, adcdev.prescale);//启 动 AD 转换
wait_event_interruptible (adcdev.wait, ev_adc);//通过中断的 方式等待结果
… if(converter_channel==3) //通道的选择
ADCDAT0 为 A/D 转换数据寄存器,16 位寄存器, 其中[9:0] 位为转换结果,在此驱动程序中,只要在转换结束后,读取 ADC- DAT0 的低 10 位就可以得到转换结果。
2 驱动程序的组成及设计
驱动程序是操作系统内核与硬件设备的直接接口, 驱动程 序屏蔽了硬件的细节, 使得应用程序可以像操作普通文件一样 对硬件设备进行操作。Linux 将设备分为字符设备,块设备和网 络设备三种。A/D 转换是属于字符设备。设备驱动程序主要完 成如下功能[4]: (l)对设备初始化和释放;(2)把数据从内核传送到 硬件和从硬件读取数据;(3) 读取应用程序传送给设备文件的数 据并回送应用程序请求的数据;(4)检测和处理设备出现的错误。
关键词: 嵌入式系统; Linux 系统; 设备驱动; 多路 A/D 转换
中图分类号: TP311.1
文献标识码 A
Abstract: Embedded operating system such as the applications of ARM -Linux have become more and more popular, but the Linux
技 system itself did not have a wide variety of hardware devices to provide ready -made drivers, especially because of the flexibility of
engineering applications on the need to develop a product suited to their own device drivers, which makes embedded Linux device
创 tion of A/D converter driver programming, the hardware-driven approach in Linux operating system was introduced, and a rapid and convenient development driver approach in embedded Linux operating system was also summed up in this paper.
作 系 统 下 , 对 S3C2440 微 处 理 器 内 部 A/D 转 换 器 实 现 多 路 的 驱 动 方 法 ; 通 过 编 写 该 A/D 转 换 驱 动 程 序 , 总 结 出 一 种 在 嵌 入 式
Linux 操 作 系 统 下 快 速 方 便 的 开 发 驱 动 程 序 的 方 法 。
…
} 2.3 中断服务程序 在 Linux 系统中,中断是由系统来管理与维护的。中断服务 子程序在初始化函数中调用 irq_request 函数与相应中断号关 联,并将该中断的相关信息添加到系统的中断信息列表中,以便 在中断发生时供系统检索。目标机上完成某一 AD 转换后,将产 生一中断号为 IRQ_ADC_DONE 的中断, 系统将自动检索并调 用相应的中断服务子程序。此处的中断服务子程序完成 ADC 寄存器中读取转换结果 (通过 adc_data = ADCDAT0 & 0x3ff;实 现)、激活中断事件变量,从而 read 函数结束等待状态,返回 AD 转换结果。
3 驱动程序的编译与安装
Linux 设备驱动属于内核的一部分,它可以直接被编译进内 核,也可以作为可加载模块动态加载。编译进内核的驱动随系统 启动而加载, 而作为动态加载模块只只须在需要时执行 insmod 加载它,不需要时执行 rmmod 卸载它即可,比编译进内核方便。 驱动程序写好后,通过交叉编译器 arm-linux-gcc 编译驱动程序 后会在当前目录下生成 adc.o 文件。先将 adc.o 放到嵌入式文件
1 硬件设备
硬件系统核心部分采样的是韩国三星公司设计的基于 ARM9 的嵌 入 式 微处 理 器 S3C2440。 S3C2440 配 合 SDRAM、 FLASH、USB、网口和串口等就构成了基本的 ARM 嵌入式硬件 平台。S3C2440 芯片内部集成有 8 路 A/D 转换模拟信号输入通 道 A/D 转换控制器, 在 2.5MHz 转换时钟下最大速率可以达到 500KSPS 转换精度为 10 位,A/D 转换的供电电压 3.3V, 模拟输 入信号的电压范围 0V~3.3V。通过查阅 S3C2440 芯片资料[3]/D 转换 驱 动 程 序 中 主 要 用 的 寄 存 器 有 两 个 ADCCON 和 ADC-