110ST-M伺服参数设置
伺服参数设定

●伺服参数的初始设定1.按照下图设定“初始化设定位”。
#7 #6 #5 #4 #3 #2 #1 #0初始化设定位DGP#1:DGP 0:进行伺服参数的初始设定。
1:结束伺服参数的初始设定。
初始化设定完成后,第一位自动变为1。
这里,虽然发生000号报警,但是还不切断电源。
按下功能按键,找到伺服设定画面。
注意,请不要修改该参数的其他位参数。
2.按照下表设定“电机代码”。
读取伺服电机标签上的电机规格号(A06B-xxxx-Byyyy)的中间4位数字(xxxx)和电机型号名。
从下表中得到“电机代码”。
●αi s系列αis2/5000 0212 262αis2/6000 0234 284αis4/5000 0215 265αis8/6000 0240 240αi12/4000 0238 288αis22/4000 0265 315αis30/4000 0268 318αis40/4000 0272 322αis50/5000 0274 324 αis50/3000 FAN 0275-B□1□325αis100/2500 0285 335αis200/2500 0288 338αis300/2000 0292 342αis500/2000 0295 345 ●βi s系列βis 0.2/5000 0111 260βis 0.3/5000 0112 261βis 0.4/5000 0114 280βis 0.5/6000 0115 281βis 1/6000 0116 282βis 2/4000 0061 253βis 4/4000 0063 256βis 8/3000 0075 258βis 12/3000 0078 272βis 22/2000 0085 274所用伺服电机未列入此表中时,参见《伺服电机参数说明书》。
3.按照下表设定AMR 。
(电机的磁极对数设定) αis 电机 0 0 0 0 0 0 0 0 βis 电机4.利用CMR 使得CNC 的最小移动单位和伺服的检测单位相匹配。
教你设置伺服驱动器参数(附故障排查技巧)

教你设置伺服驱动器参数(附故障排查技巧)在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考。
然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
(1)位置比例增益设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
(2)位置前馈增益设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%(3)速度比例增益设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
(4)速度积分时间常数设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
(5)速度反馈滤波因子设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
如果需要较高的速度响应,可以适当减小设定值。
(6)最大输出转矩设置设置伺服驱动器的内部转矩限制值。
设置值是额定转矩的百分比,任何时候,这个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。
台达伺服参数设定
台达伺服参数设定1. 基本参数(伺服能够运行的前提)P1-00 设为2 表示脉冲+方向控制方式P1-01 设为00 表示位置控制模式P1-32 设为0 表示停止方式为立即停止P1-37 初始值10,表示负载惯量与电机本身惯量比,在调试时自动估算。
P1-44 电子齿轮比分子P1-45 电子齿轮比分母2.扩展参数(伺服运行平稳必须的参数,可自动整定,也可手动设置)P2-00 位置控制比例增益(提升位置应答性,缩小位置控制误差,太大容易产生噪音)。
P2-04 速度控制增益(提升速度应答性,太大容易产生噪音)。
P2-06 速度积分补偿(提升速度应答性,缩小速度控制误差,太大容易产生噪音)。
此外还需要把P2-15至P2-17 均设为0,分别代表正反转极限,紧急停止关闭。
否则的话会导致伺服驱动器报警。
此外如果有刹车的话还要把P2-18设为108 (设定第一路数字量输出为电磁抱闸信号。
)这些参数都是基于对伺服驱动器的数字输入(DI)输出(DO)功能定义表来设置。
(表7-1.表7-2)对于工程应用当中的I/O点进行端口定义。
必要的时候查表进行相应的设置。
3.共振抑制的设置P2-23 第一组机械共振频率设定值,(开启第一组机械共振频率时,P2-24不能为零)P2-25 共振抑制低通滤波。
P2-26 外部干扰抵抗增益。
P2-47 自动共振抑制设为1 抑振后自动固定。
P2-49 速度检测滤波及微振抑制。
设置完以上的参数就开始自动增益P2-32 设为1或2,伺服在运行过程中每半个小时估测负载惯量比至P1-37.再结合P2-31 的刚性及频宽设定,自动修改P2-00,P2-04,P2-06,P2-25,P2-26,P2-49等参数。
当P2-33为1时,P1-37惯量比估算完成,以上相应的控制参数值固定。
此外我们还可以把P2-32设为0,进行手动增益调整。
扩展资料:。
ST系列伺服电机选型手册(2015.5)V3.0
目录
概述:.......................................................................................................................................................... 1
3. 17 位单圈 12 位多圈机械式绝对编码器(M1)插座(15 芯;80、90 系列通用;110、130、 150、180 系列通用)
sensor SLA May sensor SLB Maz 屏
信号 +5V 0V A+ B+ A- B-
+S5V Dat+ Clk+
S0v
Dat- Clk- 蔽
座芯 编号 2 3 4 5 7 8 10 11 12 13 14 15 1
产品特点:
1. 全封闭式结构,外形美观,结构紧凑。 2. 低谐波、低齿槽转矩、反电势正弦性好,采用正弦波电流驱动,低速特性好。 3. 采用高性能永磁材料和高牌号冷轧硅钢片,功率密度高,过载能力强。 4. 采用优化电磁设计,电磁噪声低、运行平稳、效率高,可长期保持优良工作状态。 5. 采用优化惯量设计,电机响应速度快,适合各种场合应用尤其数控机床进给驱动。 6. 整机 IP66 防护等级,电机可在-15℃~40℃环境温度和粉尘油雾环境下可靠使用。 7. 采用高速、高精度光电编码器,与高性能驱动单元配合可实现高精度的速度和位置控制。 8. 配备的航空插头可以 360 度旋转,可根据产品的使用空间自行决定航空插头的出线方向。
数控机床-伺服参数设置
(5)关断电源,然后再打开电源. (6)进给齿轮比N/M(F.FG).
设定半闭环α脉冲编码器 (注1) F.FG分子(≤32767) F.FG分母(≤32767) = 电机每转所需的 位置反馈脉冲 1,000,000 (注2) (不能约分小数)
(7)移动方向
(8)速度脉冲数,位置脉冲数 ①串行αi脉冲编码器或串行α脉冲编码器时:
(10)FSSB显示和设定画面 通过一个高速串行总线(FANUC 串行伺服总线,或FSSB)连接CNC控制单 元到伺服放大器,只用用一根光缆,可显著减少机床电气的电缆使用量. 轴设定会根据轴和放大器内部之间关系自动计算并输入到FSSB设定画面.参 数1023,1905,1910-1919,1936和1937会按计算结果自动定义. ●显示 FSSB画面显示基于FSSB的放大器和轴 的信息 这个信息也可以通过操作指定. 1.按功能键 SYSTEM . 连续按向右软键几次,直到显示[FSSB]. FSSB设定画面包括:AMP SET,AXIS SET,和AMP MAINTENANCE. 按软键[AMP],则能显示AMP SET画面. 按软键[AXIS],则能显示AXIS SET画面. 按软键[MAINTE],则能显示AMP MAINTENANCE画面. 1.放大器设定画面 放大器设定画面包括两个部分:第一部分是显示通道号信息,第二部分显示脉冲 模块的信息.
�
SVS (#0)=1 (显示伺服画面)
伺服画面中的报警,对应相应的诊断画面如下表所示:
5.1 伺服参数的 初始化始设定数字伺服参数进行说明. 1.在紧急停状态,接通电源. 2.设定显示伺服设定调整画面的参数.
#0(SVS) 0:不显示伺服调整画面. 1:显示伺服调整画面. 3.暂时切断电源,再次开通电源. 4.按下面顺序,显示伺服参数的设定画面.按
est伺服调试
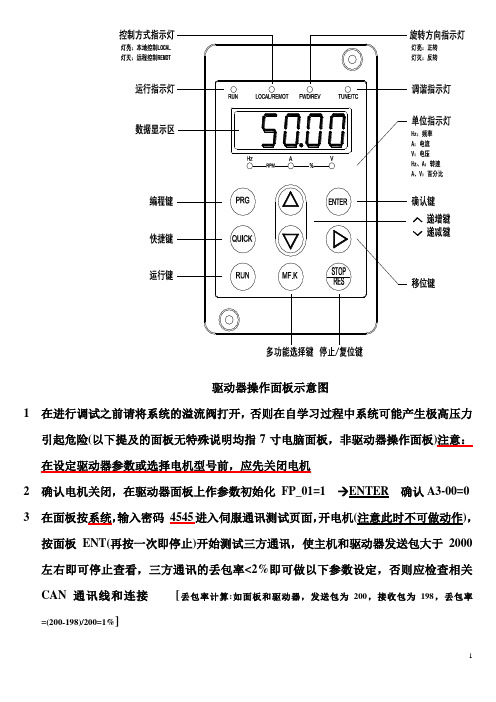
驱动器操作面板示意图1在进行调试之前请将系统的溢流阀打开,否则在自学习过程中系统可能产生极高压力引起危险(以下提及的面板无特殊说明均指7寸电脑面板,非驱动器操作面板)注意:在设定驱动器参数或选择电机型号前,应先关闭电机2确认电机关闭,在驱动器面板上作参数初始化FP_01=1 ENTER 确认A3-00=0 3在面板按系统,输入密码4545进入伺服通讯测试页面,开电机(注意此时不可做动作),按面板ENT(再按一次即停止)开始测试三方通讯,使主机和驱动器发送包大于2000左右即可停止查看,三方通讯的丢包率<2%即可做以下参数设定,否则应检查相关CAN通讯线和连接[丢包率计算:如面板和驱动器,发送包为200,接收包为198,丢包率=(200-198)/200=1%]关闭电机,选择相应电机型号(型号请查看电机铭牌),将伺服页面加速时间和减速时间设为0如电机参数与所选电机型号不一致或者无此电机型号,可确认电机参数后用自定义方式输入4打开电机,在驱动器面板上开始进行电机参数辨识(自学习)F1-16=2 ENTER RUN 如果返回主页面表明辨识成功,关闭电机。
如果显示ERR错误信息,请检查下列项目a)在驱动器面板上核对以下参数是否正确(以电脑面板伺服页面参数为准)F1-00=2F1-01 电机功率F1-04 电机额定频率F1-02 电机额定电压F1-05 电机额定转速F1-03 电机额定电流(输入)F0-10 最大频率F0-12频率上限(F0-10>= F0-12)b)检查以下硬件: 1 PG卡(驱动器编码器线接口板) 2 编码器电缆和电机动力电缆的连接情况 3 电机是否卡住5自学习成功后,在面板上设定转矩上限为50 ,驱动器面板上设定F0-08=10 设定试运转频率(先设定10%)设定完毕后开启电机,按驱动器面板的运行,随时监视驱动器面板的电流,驱动器面板电流显示值可以通过按驱动器面板上的按键来切换到电流项。
伺服驱动器重要参数的设置方法和技巧
伺服驱动器重要参数的设置方法和技巧伺服驱动器重要参数的设置方法和技巧随着市场的发展和国内功率电子技术、微电子技术、计算机技术及控制原理等技术的进步,国内数控系统、交流伺服驱动器及伺服电动机这两年有了较大的发展,在某些应用领域打破了国外的垄断局面。
笔者因多年从事数控技术工作,使用了多套日本安川、松下、三洋等数字伺服,但最近因国产伺服性价比好,使用了一些数控技术公司生产的交流伺服驱动及电动机,对使用中某些方面总结了一些简单实用的技巧。
1KNDSD100基本性能1.1基本功能SD100采用国际上先进的数字信号处理器(DSP)TM320(S240)、大规模可编程门阵列(FPGA)、日本三菱的新一代智能化功率模块(1PM),集成度高,体积小,具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。
与步进电动机相比,交流伺服电动机无失步现象。
伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。
调速比宽1:5000,转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。
采用全数字控制,控制简单灵活。
用户通过参数修改可以对伺服的工作方式、运行特性作出适当的设置。
目前价格仅比步进电动机高2000~3000元。
1.2参数调整SD100为用户提供了丰富的用户参数0~59个,报警参数1~32个,监视方式(电动机转速,位置偏差等)22个。
用户可以根据不同的现场情况调整参数,以达到最佳控制效果。
几种常用的参数的含义是:(1)“0”号为密码参数,出厂值315,用户改变型号必须将此密码改为385。
"(2)“1”号为型号代码,对应同系列不同功率级别的驱动器和电动机。
(3)“4”号为控制方式选择,改变此参数可设置驱动器的控制方式。
其中,“0”为位置控制方式;“1”为速度控制方式;“2”为试运行控制方式;“3”为JOG控制方式;“4”为编码器调零方式;“5”为开环控制方式(用户测试电压及编码器);“6”为转矩控制方式。
伺服参数设置很重要(位置控制模式、速度控制模式、力矩控制)
伺服参数设置很重要(位置控制模式、速度控制模式、力矩控制)伺服在自动化设备的组成中占有重要地位。
伺服是在其额定转速范围内,属于恒力矩输出。
且本身具有多种反馈调节,用来保证伺服的运行精度以及输出力矩的精度。
全功能的伺服控制器拥有3多种控制模式,每种控制模式的控制方法也不一样,那么我们在不同的控制模式下,应该如何接线,又应该怎样调试其参数呢?1:位置控制模式,这是我们最常用的伺服控制模式,我们可以利用伺服控制器控制伺控制伺服走不同的工作位置,想要达到控制要求,我们就需要了解其硬件接线以及其相应的参数调试。
位置控制接线图根据接线图我们可以看出,伺服的功能强大,拥有很多引脚,很多功能。
但是我们可以根据自己的需求,只接其中的部分引脚即可。
(其中7号引脚需接12~24v,41号引脚和29号引脚短接到0v,必须要接的)然后如果我们用PLC对伺服进行控制,若是我们接的3,4,5,6号引脚,则我们需要将3号和5号引脚短接到24v,4号和6号引脚串接2KΩ的电阻后分别接到PLC的脉冲输出和方向输出端子上。
如果我们用的是1,4,2,6号引脚,则我们不需要串电阻即可。
那么接好线后,我们需要更改伺服的哪些参数呢?位置控制参数调节参数的设置,小伙伴们可以参考一下伺服的综合手册。
2:速度控制模式,此模式使用较少,此种模式,伺服控制器的功能相当于一个变频器,能够用模拟量对伺服的运行速度进行控制,其硬件接线图如下图所示:速度控制接线图此种控制模式下,(其中7号引脚需接12~24v,41号引脚和29号引脚短接到0v,必须要接的),我们可以将0~10v的电压接到14以及15号引脚上,设置好相关参数之后,我们就可以通过改变0~10v 的电压来控制电机的运行速度,其中有一点要注意,我们可以将电压变为0v用来停止电机的运行,但是通常情况下,模拟量不会完全为0,因此我们可以控制26号引脚,通过接通26号引脚,将伺服停止。
想要使用此功能,需要对Pr315设置,将其值改为1后,保存到驱动器中即可。
华大系列伺服电机选型手册

LB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~27额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):220LBB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~19.1额定功率(Kw):0.4~3.0额定转速(rpm):1500、2000、3000最高转速(rpm):3000、5000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):220HB系列机座号(mm):110、130、150额定转矩(Nm):2~27额定功率(Kw):0.6~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):380HBB系列机座号(mm):110、130、150额定转矩(Nm):2.4~28.7额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000最高转速(rpm):3000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):380请您关注以下伺服电机为自冷式散热方式,安装时请选择足够大的安装板。
伺服电机长期工作,机体本身会有一定的温度,这是正常情况。
装配了失电制动器的伺服电机,其失电制动器的电源必须由驱动器控制开闭,否则会造成工作状态不佳。
伺服电机内装精密反馈元件,严禁重力敲击电机轴伸端及后部。
请注意电机轴伸端的最大径、轴向力的限值。
严禁随意更改、拆装及加工电机部件。
请您将需求告之我们,我们来为您服务。
电机电联接器转矩转速曲线示意图LB 、HB系列 LBB 、HBB 系列LB、LBB 、HB 、HBB 系列伺服电机的Mmax=3Mn ;Mmax 输出状态为短时工作。
安川伺服电机参数基本调整

安川伺服电机参数基本调整动态参数调整步骤:步骤一.设定系统刚性(Fn 001)Kp : 位置回路比例增益(机床Kp 建议值30-90 /sec)Kv : 速度回路比例增益(机床Kv 建议值30-120 Hz)Ti : 速度回路积分增益(机床Ti 建议值10-30 ms)范例:步骤二. 自动调协(auto turning) 寻找马达与机床惯性比自动调协目的,主要是在计算马达与机床整合后有些动态参数会受到影响ex: 马达负载惯性比… ,如果不先将相关参数找出速度回路的表现会与Kv/Ti 设置的结果不一致自动调协操作步骤:1.参数Pn110设11。
(打开在线自动调谐功能)2.手动Jog床台让床台来回往复多次运行。
3.手动Jog床台时如发生共振现象,请立即压下紧急停止按钮,将驱动器参数Pn408设1(打开共振抑制功能),然受修正Pn409(共振抑制频率)设定,1米加工中心机建议Pn409设定200。
4.将Fn007内容写入EEPROM。
(按Mode键至Fn000→按Up或Down键至Fn007→持续按Data 键1秒显示负载贯性比→持续按Set键1秒后Fn007内容显示之负载贯量比即可写入EEPROM)5.参数Pn110设12。
(关闭在线自动调谐功能)步骤三.起动并设定驱动器抑制共振功能相关参数(Pn408设1即打开共振抑制功能,Pn409可设定共振抑制频率) 马达与机床结合后,除了马达选用太小,无法达到高响应之外,有时也会发生马达扭力够,但是因为机床床台传动刚性较差,会产生共振而无法达到高响应又平顺的控制目标,此时,除了加强机床的传动刚性外,可利用控制器抑制共振功能,而得到高响应的结果 .步骤四. 将速度回路增益参数再调高就位置回路控制而言,速度回路是内回路,内回路响应越高,外回路(位置回路)表现越如预期,比较不会受到外界切削力,磨擦力的影响,所以在切削应用场合,请将速度回路增益尽量调高,以得到更好的切削质量YASKAWA伺服參數設定說明:备注: 1、带* 为驱动器必须设定的参数,马达才能正常运转!2、首先设置驱动器的电子齿轮比Pn202 / Pn203和需要马达转一圈回授的脉冲数Pn201 计算方法如下:通常新代控制器所设精度单位1um/Pules (可在系统参数17中设所需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴卡的倍频)计算公式:电子齿轮比Pn202 / Pn203 = ﹝编码器的脉冲数× 4 ×M﹞÷( 负载转一圈移动量脉冲数×N )M和N是指马达和工作台传动侧的机械齿轮比新代系统参数61~63 = 马达转一圈回授的脉冲数Pn201 = 负载转一圈移动量脉冲数÷控制器内部所设的倍频4****** ex:******当螺杆的节距是10mm 马达选用C 型17比特采用直传连轴器那齿轮比计算如下:负载转一圈移动量脉冲数= 10mm÷1um/Pules =104 PulesM / N = 1 / 1Pn202 / Pn203 = (32768×4×1 ) ÷(104 ×1 ) = 8192 / 625Pn201 = 104 ÷ 4 = 2500 Pules2、设定上表中的驱动器参数,值为后面的设定值;Pn201、Pn202、Pn203为上面公式根据实际情况计算出来的值;Pn100、Pn101、Pn102先不修改数值,为出厂值;3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过增大Fn001驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。
ST伺服电机产品资料(中文)

AC电机与伺服驱动器● AC电机与伺服驱动器适配表ST系列电机主要参数EP2伺服驱动器配置电机型号额定转矩额定转速额定功率MSC MSC+0.4Kw G3L08F80ST-M01330 1.3Nm3000rpm0.75Kw G3L08F3000rpm80ST-M02430 2.4Nm3000rpm1.0Kw G3L08F80ST-M03330 3.3Nm110ST-M02030 2 Nm 3000 rpm 0.6 Kw G3L08F G3L12F110ST-M04030 4 Nm 3000 rpm 1.2 Kw G3L08F G3L12F110ST-M05030 5 Nm 3000 rpm 1.5 Kw G3L12F G3L16F110ST-M06020 6 Nm 2000 rpm 1.2 Kw G3L12F G3L16F110ST-M06030 6 Nm 3000 rpm 1.6 Kw G3L12F G3L16F130ST-M04025 4 Nm 2500 rpm 1.0 Kw G3L08F G3L12F130ST-M05025 5 Nm 2500 rpm 1.3 Kw G3L12F G3L16F130ST-M06025 6 Nm 2500 rpm 1.5 Kw G3L12F G3L16F130ST-M07720 7.7 Nm 2000 rpm 1.6 Kw G3L12F G3L16F130ST-M07730 7.7 Nm 3000 rpm 2.4 Kw G3L16F G3L26F130ST-M10015 10 Nm 1500 rpm 1.5 Kw G3L12F G3L16F130ST-M10025 10 Nm 2500 rpm 2.6 Kw G3L16F G3L26F130ST-M15015 15 Nm 1500 rpm 2.3 Kw G3L16F G3L26F130ST-M15025 15 Nm 2500 rpm 3.8 Kw G3L26F G3L36F150ST-M15025 15 Nm 2500 rpm 3.8 Kw G3L26F G3L36F150ST-M18020 18 Nm 2000 rpm 3.6 Kw G3L26F G3L36F150ST-M23020 23 Nm 2000 rpm 4.7 Kw G3L36F150ST-M27020 27 Nm 2000 rpm 5.5 Kw G3L36F配置说明:MSC配置适用于过载倍数要求不高、单位时间内电机起停次数不多、高速轻载的场合;MSC+配置适用于过载倍数要求高、单位时间内电机起停次数频繁、高速重载的场合。
伺服转台的传动系统设计毕业设计2522306

毕业设计伺服转台的传动系统设计摘要毕业设计是对大学专业知识的稳固、提升和综合运用,是对学生的理论与实质相联合能力的考验。
经过毕业设计这一过程,达成简单机械系统装置的设计,建立正确的设计思想和工程意识,培育独立剖析、解决实质设计问题的能力,为此后的学习和工作打下优秀的基础。
本文达成了对一个伺服转台的传动系统设计。
与已有的伺服系统对比,此系统它拥有构造紧凑、外廓尺寸小和重量轻等长处。
论文第一简要介绍了课题的背景,以及伺服系统的应用,而后依据方案确立传动构造种类,进而确立了传动的基本种类。
论文主体部分包含驱动装置(包含电动机)、锥齿轮传动、少齿差行星减速器。
经过对驱动装置包含电动机选用,而后分派锥齿轮传动、行星减速器、的传动比,确立锥齿轮和行星减速器的大概构造以后,对其进行了整体构造的设计计算和校核。
论文最后对设计过程进行了总结。
因自己的知识水平有限,实质工作经验不足,之中的错误与不当之处在所不免,恳请读者责备指正重点词:伺服传动系统;少齿差行星减速器;锥齿轮传动ABSTRACTThe graduation design is an approach for students to consolidate, improve and apply the professional knowledge they have learned in university and it is also a test of the students’ability of combining theories with practices. Through the process of designing a simple mechanics working procedure, I have gained the idea of designing, the ability of analyzing and solving problems. Therefore it helps me lay a solid foundation for the further study and workThis paper completed the transmission system design of a servo turntable. Compared with the existing servo system at home and abroad. This system has compact structure. Outline the advantages of small size and light weight.Paper first briefly introduces the background of the topic. and the application of servo system. Then according to the schemes to determine the transmission structure types. To identify the basic types of transmission. Paper main body part including drive device(Consists of motor). Bevel gear drive. Planetary gear reducer. Through the drive unit consists of motor. Bevel gear drive. Planetary gear reducer. Distribution of transmission ratio. After the general structure of the spiral bevel gear and planetarygear reducer is determined. On the whole structure design and calculation and checking. Finally, the paper design process are summarized.There is a limit to a person’s knowledge and working experience. So I sincerely hope that the readers can give me more advice if there is any mistake leaded by my carelessnessKey words: Servo drive system; Less tooth differenced planetary reducer; Bevel gear drive目录摘要 (i)ABSTRACT (ii)目录 (iii)1 绪论 (1)2 概括 (2)3 传动系统的整体设计 (2)伺服电机的选用 (2)传动方案的选用 (3)输出机构选择 (4)4 传动系统设计 (4)传动锥齿轮的设计 (4)行星减速装置的设计 (7)齿轮齿数确立 (7)模数确立 (7)齿轮几何尺寸确实定 (10)偏爱轴的设计 (16)输出轴的设计 (17)销轴及销轴套的选择 (18)顶圆柱齿轮设计 (18)5 主要零件的校核 (20)偏爱轴的校核 (21)销轴的曲折强度校核 (22)输出轴的校核 (24)键的校核 (25)结束语 (26)参照文件 (27)1绪论伺服控制技术是自动化学科中与家产部门联系最密切、服务最宽泛的一个分支。
est伺服调试
驱动器操作面板示意图1在进行调试之前请将系统的溢流阀打开,否则在自学习过程中系统可能产生极高压力引起危险(以下提及的面板无特殊说明均指7寸电脑面板,非驱动器操作面板)注意:在设定驱动器参数或选择电机型号前,应先关闭电机2确认电机关闭,在驱动器面板上作参数初始化FP_01=1 ENTER 确认A3-00=0 3在面板按系统,输入密码4545进入伺服通讯测试页面,开电机(注意此时不可做动作),按面板ENT(再按一次即停止)开始测试三方通讯,使主机和驱动器发送包大于2000左右即可停止查看,三方通讯的丢包率<2%即可做以下参数设定,否则应检查相关CAN通讯线和连接[丢包率计算:如面板和驱动器,发送包为200,接收包为198,丢包率=(200-198)/200=1%]关闭电机,选择相应电机型号(型号请查看电机铭牌),将伺服页面加速时间和减速时间设为0如电机参数与所选电机型号不一致或者无此电机型号,可确认电机参数后用自定义方式输入4打开电机,在驱动器面板上开始进行电机参数辨识(自学习)F1-16=2 ENTER RUN 如果返回主页面表明辨识成功,关闭电机。
如果显示ERR错误信息,请检查下列项目a)在驱动器面板上核对以下参数是否正确(以电脑面板伺服页面参数为准)F1-00=2F1-01 电机功率F1-04 电机额定频率F1-02 电机额定电压F1-05 电机额定转速F1-03 电机额定电流(输入)F0-10 最大频率F0-12频率上限(F0-10>= F0-12)b)检查以下硬件: 1 PG卡(驱动器编码器线接口板) 2 编码器电缆和电机动力电缆的连接情况 3 电机是否卡住5自学习成功后,在面板上设定转矩上限为50 ,驱动器面板上设定F0-08=10 设定试运转频率(先设定10%)设定完毕后开启电机,按驱动器面板的运行,随时监视驱动器面板的电流,驱动器面板电流显示值可以通过按驱动器面板上的按键来切换到电流项。
FS110伺服说明书
10
14
4
13
3
12
2
11
DB15P
1
6
W P D C
富凌FS100/110系列伺服电机
-5-
-6-
3.3.2 接线说明 接线注意事项: * 接线材料依照电线规格使用。 * 电缆长度,指令电缆3m以内,编码器电缆20m以内。 * 检查R、S、T和L1、L2的电源和接线是否正确,接线前请确认控制器电压等级。 * 电机输出U、V、W端子相序,必须和电机相应端子一一对应,接错电机可能不转 或飞车。不能用调换三相端子的方法来使电机反转,这一点与异步电动机完全不同。 * 必须可靠接地,而且单点接地。 * 装在输出信号的继电器,其吸收的二极管的方向要连接正确,否则会造成故障无法输出信 号。 * 为了防止噪声的错误动作,请在电源上加入绝缘变压器及噪声滤波器等装置。 * 请将动力线(电源线、电机线等的强电回路)与信号线相距30cm以上来配线,不要放置在 同一配线管内。 * 请安装非熔断型断路器使驱动器故障时能及时切断外部电源。
输入 电源
2.4伺服功率标准
电源 控制 主电源 200V 额定电流 最大电流 220V Class:1 Phase AC200V~230V+10%~15%,50/60Hz
220V Class:3 Phase AC200V~230V+10%~15%,50/60Hz
400W 2.6 7.8A
800W 5.2 15A
HDR-15P插头序号排列
DO5+ DO5NC
DO4NC
OZNC
PULS+
PULS-
SING+
SING- NC
DI5
DI7
CN1 DB-44插头信号排列
天虹伺服驱动器说明书
永磁同步电机马区动器用户手册THSR-A/B 系列目录一. 安装 (1)1.装时注意事项 (1)2 .环境条件 (1)二. 产品型号对照 (2)1 •伺服驱动器铭牌说明 (2)2 •驱动器型号说明 (2)三. 驱动器外观及面板说明 (3)四. 伺服驱动器尺寸图 (6)五. 伺服电机尺寸图 (8)六. 伺服驱动器与伺服电机搭配对照表 (10)七. 驱动器使用电线规格 (11)八. 控制信号标准接线图 (12)九. 驱动器端子说明 (14)十.伺服驱动器信号输入输出回路图 (17)十一. 驱动器接线方式 (18)1.绣花机主轴 (19)2 .绣花机移框 (20)3 .绣花机D轴 (21)4 .绣花机H轴 (22)十二• 参数表 (23)十三.驱动器异常报警 (24)附录:主轴/移框参数快速设置 (26)主轴参数快速设置 (26)移框参数快速设置 (26).安装1 •装时注意事项1)驱动器与电机连线勿拉紧;电源线与控制信号线分开走线,有30cm的间距,这样可以减小电源对信号线的干扰;2)接线时,禁止将三相电源接至U、V、W端子上;3)确保接地良好;4)电机轴心必须与设备轴心对心良好;5)通电时,请勿拆卸驱动器、电机、或更改配线;6)通电运行时,请勿接触散热片,以免烫伤2 •环境条件本产品驱动器使用环境温度为0°C〜50 °C。
若环境温度超过45°C 以上时,请置于条件通风良好的场所。
长时间的运转建议在45°C以下的环境温度,以确保产品的可靠性能。
如果本产品装在配电箱里,那配电箱的大小及通风条件必须让所有内部使用的电子装置没有过热的危险。
而且也要注意机器的震动是否会影响配电箱的电子装置。
除此之外,使用的条件也包括:▲无发高热装置的场所;▲无水滴、蒸气、灰尘及油性灰尘的场所;▲无腐蚀、易燃性的气、液体的场所;▲无漂浮性的尘埃及金属微粒的场所;▲坚固无振动的场所;▲无电磁噪声干扰的场所。