山洋伺服马达参数设定
山洋RS2伺服参数设置

山洋R2系列伺服参数设置一、按键说明:(模式键):按一次,模式变换一个;(上键):在当前光标位置时,按一次数据增加1;(下键盘):在当前光标位置时,按一次数据减1;修改用户参数:/光标键):选择光标位置,确认当前模式并进入当前模式的编辑画面,保存数据时,按一秒钟以上。
二、修改用户参数:1、按“MODE”键,选择“Gr000”;2、用光标键选择需要修改的参数;3、用上键或下键修改数字;4、选好参数组后,按确认键进入参数编辑画面;5、用光标键“上键或下键”修改参数后,按确认键,待光标不闪电式时参数已保存;6、按“MODE”键退出编辑画面。
三、RS2系列的参数Gr 0.00 设为02 (手动增益模式)Gr 1.02 设为80 (KP1位置环增益值调整)Gr 1.12 设为100 (KVP1速度环增益值调整)Gr 1.13 设为20 (TVI1速度环积分时间常数值调整)Gr 1.14 设为100 (JRAT1负载惯量百分比值调整)Gr 8.00 设为00 (CMDPOL电机旋转方向调整,07为反方向)Gr 8.10 设为00(正反转脉冲),02为脉冲+方向(PMOD位置指令方式选择)Gr 8.12 设为00-07 (位置指令脉冲数字滤波器调整,R电机请设为07)Gr 8.13 设为电子齿轮的分子Gr 8.14设为电子齿轮的分母Gr 8.29设为速度控制模式下电压/转速设定,一般设为200rpm / VGr 9.00 设为0C(正传超程屏蔽)Gr 9.01 设为0A(反传超程屏蔽)Gr 9.05 设为01(SON内部使能)Gr C.04 设为2000/32768(电机转一圈驱动器反馈给上位电脑2000脉冲)Gr C.05 设为驱动器反馈编码器的A和Z相信号的极性Gr C.06 设为00(32768);01(8192)(电机转一圈驱动器可以反馈给上位电脑的脉冲数)Gr C.08 设为01(针对R系列电机)四、系统参数SY01 设为00为3相200V,01为单相200V。
YASKAWA伺服参数设定说明

YASKAWA伺服参数设定说明YASKAWA是一家全球领先的伺服机器人和工业自动化解决方案供应商,其产品广泛应用于各种制造业领域。
为了实现最佳的运动控制性能,YASKAWA伺服系统提供了各种参数设置选项,以满足不同应用需求。
以下是YASKAWA伺服参数设定的详细说明。
1.控制方式设置:YASKAWA伺服系统提供了位置控制、速度控制和力矩控制等不同的控制方式。
根据实际应用需求,在参数设置中选择适当的控制方式。
2.增益设定:伺服系统的增益参数用于控制系统的稳定性和响应速度。
通过增益设定,可以调整伺服系统的动态响应性能。
通常,根据应用需求进行增益调整,以达到最佳的系统性能。
3.比例系数(Kp)设置:比例系数是伺服系统PID控制器的比例增益。
通过调整比例系数,可以控制系统的稳定性和快速响应性能。
通常,较高的比例系数能够快速响应外部扰动,但过高的值可能导致系统震荡。
4.积分系数(Ki)设置:积分系数是伺服系统PID控制器的积分增益。
通过调整积分系数,可以提高系统对于稳态误差的抑制能力。
通常,较大的积分系数可以减小稳态误差,但过大的值可能导致系统不稳定。
5.微分系数(Kd)设置:微分系数是伺服系统PID控制器的微分增益。
通过调整微分系数,可以控制系统的抗振性能。
较大的微分系数可以减小系统的震荡,但过大的值可能导致系统过于敏感。
6.速度限制设置:伺服系统的速度限制参数用于限制系统的最大速度。
通过设置速度限制,可以保证系统在安全范围内进行运动。
根据机器的设计和应用需求,设定适当的速度限制值。
7.力矩限制设置:伺服系统的力矩限制参数用于限制系统的最大力矩输出。
通过设置力矩限制,可以防止系统超载。
根据机器的设计和应用需求,设定适当的力矩限制值。
8.过载保护设置:YASKAWA伺服系统提供了多种过载保护选项,包括过负荷保护、过电流保护和过热保护等。
通过设置适当的过载保护参数,可以保证系统的安全运行。
9.伺服滤波器设置:伺服滤波器参数用于平滑伺服系统的输出信号。
伺服参数设定

●伺服参数的初始设定1.按照下图设定“初始化设定位”。
#7 #6 #5 #4 #3 #2 #1 #0初始化设定位DGP#1:DGP 0:进行伺服参数的初始设定。
1:结束伺服参数的初始设定。
初始化设定完成后,第一位自动变为1。
这里,虽然发生000号报警,但是还不切断电源。
按下功能按键,找到伺服设定画面。
注意,请不要修改该参数的其他位参数。
2.按照下表设定“电机代码”。
读取伺服电机标签上的电机规格号(A06B-xxxx-Byyyy)的中间4位数字(xxxx)和电机型号名。
从下表中得到“电机代码”。
●αi s系列αis2/5000 0212 262αis2/6000 0234 284αis4/5000 0215 265αis8/6000 0240 240αi12/4000 0238 288αis22/4000 0265 315αis30/4000 0268 318αis40/4000 0272 322αis50/5000 0274 324 αis50/3000 FAN 0275-B□1□325αis100/2500 0285 335αis200/2500 0288 338αis300/2000 0292 342αis500/2000 0295 345 ●βi s系列βis 0.2/5000 0111 260βis 0.3/5000 0112 261βis 0.4/5000 0114 280βis 0.5/6000 0115 281βis 1/6000 0116 282βis 2/4000 0061 253βis 4/4000 0063 256βis 8/3000 0075 258βis 12/3000 0078 272βis 22/2000 0085 274所用伺服电机未列入此表中时,参见《伺服电机参数说明书》。
3.按照下表设定AMR 。
(电机的磁极对数设定) αis 电机 0 0 0 0 0 0 0 0 βis 电机4.利用CMR 使得CNC 的最小移动单位和伺服的检测单位相匹配。
伺服驱动器参数设置方法
伺服驱动器参数设置方法
1. 前期准备
根据伺服驱动器使用说明书来确认系统参数的设置范围,同时要了解所需参数的具体名称和作用。
在设置参数前,先停止伺服系统的运转。
2. 主伺服参数设置
主伺服参数指防护、速度、加速度等参数。
设置前,先按照使用说明书的要求选择相应的参数。
然后进行参数设置。
3. PID参数设置
PID参数设置包括比例系数、积分时间和微分时间三个参数。
一般情况下,这三个参数是配套使用的。
一般情况下,这三个参数都是需要根据实际情况进行调整的。
在设定前,先根据使用说明书选择相应的参数,然后调整PID参数,直到达到理想的运动效果。
4. 位置误差调整
基础参数调整完成后,要进行位置误差调整。
这时,可以手动转动伺服电机,观察位置误差变化。
这个过程中,要根据速度的变化,对位置误差进行调整,直到
达到预期效果。
5. 整机参数调整
完成单个电机的参数设定后,还需要对整个伺服系统进行参数调整。
整机参数包括系统响应速度、整机加速度等。
通过调整整机参数,可以使整个伺服系统的运动更加顺畅。
6. 参数测试
参数设置完成后,还需要对其进行测试,以验证是否满足了伺服系统的设计要求。
在测试过程中,可以根据需要逐步调整参数,以达到最佳效果。
伺服电机常用参数设置

伺服电机常用参数设置
1. 鞍点误差:指电机安装完成后,转子相对静止状态下实际旋转角度,角度误差一般控制在10°以内。
2. 死区:指控制电路采用抗突响应等措施,以免出现电机驱动器输入端的小幅度信号波动,而导致控制电机不断颠簸的现象。
3. 功率负载百分比:判断电机使用条件的关键参数之一。
它可以查出负载的变化程度,负载变化大会加剧摩擦、韧性变化,缩短电机的使用寿命。
4.额定转速:电机额定转速每秒相当于多少圈数,配合电机减速比例进行设定。
5. 额定转矩:转矩,力矩,它是电机在原动体受力的唯一指标,它是定义电机运转功率大小依据,其值越大,功率越大,达成要求的转速便越快。
伺服电机的调试方法及操作规程

伺服电机的调试方法及操作规程伺服电机的调试方法1、初始化参数在接线之前,先初始化参数。
在掌控卡上:选好掌控方式;将PID参数清零;让掌控卡上电时默认使能信号关闭;将此状态保存,确保掌控卡再次上电时即为此状态。
在伺服电机上:设置掌控方式;设置使能由外部掌控;编码器信号输出的齿轮比;设置掌控信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的掌控电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,假如你只准备让电机在1000转以下工作,那么,将这个参数设置为111、2、接线将掌控卡断电,连接掌控卡与伺服之间的信号线。
以下的线是必需要接的:掌控卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和掌控卡(以及PC)上电。
此时电机应当不动,而且可以用外力轻松转动,假如不是这样,检查使能信号的设置与接线。
用外力转动电机,检查掌控卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。
3、试方向对于一个闭环掌控系统,假如反馈信号的方向不正确,后果确定是祸害性的。
通过掌控卡打开伺服的使能信号。
这是伺服应当以一个较低的速度转动,这就是传说中的“零漂”。
一般掌控卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)掌控。
假如不能掌控,检查模拟量接线及掌控方式的参数设置。
确认给出正数,电机正转,编码器计数加添;给出负数,电机反转转,编码器计数减小。
假如电机带有负载,行程有限,不要接受这种方式。
测试不要给过大的电压,建议在1V以下。
假如方向不一致,可以修改掌控卡或电机上的参数,使其一致。
4、抑制零漂在闭环掌控过程中,零漂的存在会对掌控效果有确定的影响,建议将其抑制住。
使用掌控卡或伺服上抑制零飘的参数,认真调整,使电机的转速趋近于零。
由于零漂本身也有确定的随机性,所以,不必要求电机转速确定为零。
5、建立闭环掌控再次通过掌控卡将伺服使能信号放开,在掌控卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,假照实在不放心,就输入掌控卡能允许的最小值。
山洋RS1伺服调试快速入门手册

如果出现“Not Connected”, 检查电源或驱动器与电脑的 连接线,然后回到幻灯片 “连接驱动器-1”,按提示 操作。
点击 “Connected”
点击”Exit”完成设 点击”Exit”完成设 ”Exit” 置
马达参数设置-1
点击Parameter 选择Motor 点击Parameter ,选择Motor Parameter Setting
点击 “ Execute”
点击“OK” 点击“OK”完成操 作
脉冲点动- 2
2. 点击此键开始设置 1. 选择此项 3. 设定运行脉冲值 4. 设定速度值
点击“Write” 5. 点击“Write” 键
点击“ ON” 5. 点击“Servo ON”开始马达励磁
脉冲点动- 3
点击“ 点击“Servo OFF ”键停止马 达励磁
转矩控制模式
06 07 08 09 0A
: : : : :
131072 p/r ( 17 bit ) 262144 p/r (18 bit ) 524288 p/r ( 19 bit ) 1048576 p/r ( 20 bit ) 2097152 p/r (21 bit )
选择控制模式
00 : 转矩 / 01 : 速度 / 02 : 位置 / 09 位置环 编码器设置 外部编码器 分辨率设置 再生电阻设置
点击“ Execute” 点击““ Execute”
点击”OK”完成操 点击”OK”完成操 ”OK” 作
速度点动 - 2
1. 选择此 项 点击“Exit” 2. 点击“Exit”更改运行速度
4.点击“Edit” 4.点击“Edit”键 点击
3. 设定速度值
点击“ ON” 5. 点击“Servo ON”开始马达励磁
山洋伺服电机RS快速入门手册

3.选择控制方式。一般选择:02。 page 08:00:转矩控制模式,03:速度控制-转矩控制切换 01:速度控制模式,04:位置控制-转矩控制切换 02:位置控制模式,05:位置控制-速度控制切换
4.再生电阻选择。一般选择:00。 page 0b:00:没有连接再生电阻,01:使用内置再生电阻, 02:使用外部再生电阻。
3.Page15: GER1电子齿轮1 。 说明:设定值为初始1:1时,马达转一圈的脉冲是131072个脉
冲。通常将该参数的分子设定为13107,分母设定乘以10即为马 达转一圈的脉冲数。
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第8组参数(图例) 。
SMC Pneumatics (H.K.) Ltd.
二.选择伺服马达型号。
SMC Pneumatics (H.K.) Ltd.
二.选择伺服马达型号。
2.把选择好的型号保存到伺服驱动器里面。
1. 点击该处。
三.设置系统参数。
SMC Pneumatics (H.K.) Ltd.
1.选择伺服马达主电源电压。 page 00:00:表示三相200V电压,01:表示单相200V电压。
说明:当该设定值越大,马达定位的时间越长。对于负载较重, 反应速度不是太快的时候,可适当地增大该值,以满足要求。 4.Page15:JPAT1 负载惯量比1。
说明:当该设定值太小时,马达可能很容易转动,此时可以适当 地调大该值,直到马达不发生振动为止。
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第9组参数。
1.Page00:正转超程功能。 说明:当伺服马达处于正超程状态时,改变设置则可。 0C:当通用输入CONT6为ON时启动该功能 0D:当通用输入CONT6为OFF时启动该功能
YASKAWA伺服参数设定说明
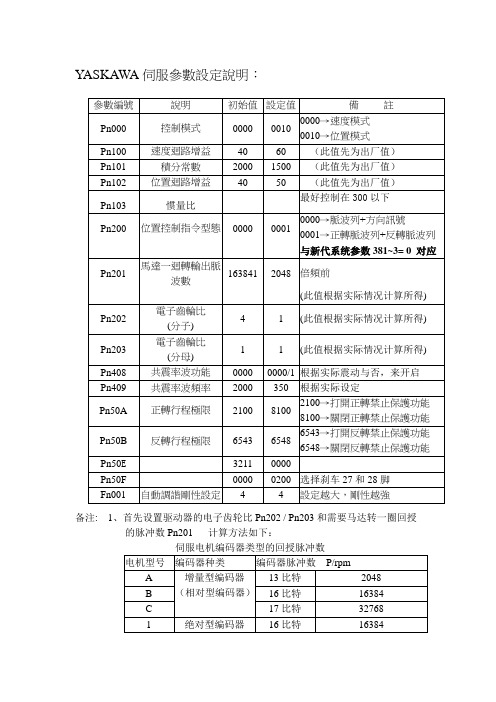
YASKAWA伺服參數設定說明:备注: 1、首先设置驱动器的电子齿轮比Pn202 / Pn203和需要马达转一圈回授的脉冲数Pn201 计算方法如下:通常新代控制器所设精度单位1um/Pules (可在系统参数17中设所需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴卡的倍频)计算公式:电子齿轮比Pn202 / Pn203 = ﹝编码器的脉冲数× 4 ×M﹞÷( 负载转一圈移动量脉冲数×N )M和N是指马达和工作台传动侧的机械齿轮比马达转一圈回授的脉冲数Pn201 = 负载转一圈移动量脉冲数÷控制器内部所设的倍频4****** ex:******当螺杆的节距是10mm 马达选用C 型17比特采用直传连轴器那齿轮比计算如下:负载转一圈移动量脉冲数= 10mm÷1um/Pules =104 PulesM / N = 1 / 1Pn202 / Pn203 = (32768×4×1 ) ÷(104 ×1 ) = 8192 / 625Pn201 = 104 ÷ 4 = 2500 Pules2、设定上表中的驱动器参数,值为后面的设定值;Pn201、Pn202、Pn203为上面公式根据实际情况计算出来的值;Pn100、Pn101、Pn102先不修改数值,为出厂值;3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过增大Fn001驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。
注意一点:调完后,需把X、Y、Z的位置增益Pn102设成一样大;注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
备注1、KA为刹车控制输出的中间转换继电器 (驱动器内的接点电流功率不够大,才需要这个)2、DC24为开关电源3、CR3为紧急停止的继电器4、红线框内为控制器上输出的点O5。
伺服驱动器参数设置方法

伺服驱动器参数设置方法伺服驱动器是现代工业自动化控制系统中的重要组成部分,它能够实现精准的位置控制和速度控制,广泛应用于各种机械设备中。
在使用伺服驱动器时,正确的参数设置是至关重要的,它直接影响到系统的稳定性和性能。
本文将介绍伺服驱动器参数设置的方法,帮助您正确地配置伺服驱动器,提高系统的控制精度和稳定性。
首先,我们需要了解伺服驱动器的基本参数,包括电机额定电流、编码器分辨率、控制模式等。
这些参数通常可以在伺服驱动器的技术手册中找到,我们需要仔细阅读手册,确保对这些参数有充分的了解。
在设置伺服驱动器参数时,我们需要根据实际的应用需求来调整这些参数,以确保系统能够达到最佳的性能。
其次,我们需要进行电机参数的设置。
电机参数包括电机额定电流、电机型号、编码器类型等。
在设置电机参数时,我们需要根据实际的电机型号和性能来进行调整,确保伺服驱动器能够正确地识别和控制电机。
此外,还需要根据实际的应用需求来调整电机参数,以确保系统能够实现精准的位置和速度控制。
接下来,我们需要进行控制参数的设置。
控制参数包括速度环参数、位置环参数、加速度限制等。
在设置控制参数时,我们需要根据实际的应用需求来进行调整,以确保系统能够实现稳定的控制。
通常情况下,我们可以通过试验和调试来确定最佳的控制参数,以确保系统能够达到最佳的性能。
最后,我们需要进行系统整体参数的设置。
系统整体参数包括通信参数、报警参数、保护参数等。
在设置系统整体参数时,我们需要根据实际的应用需求来进行调整,以确保系统能够安全可靠地运行。
此外,还需要对系统的报警和保护功能进行合理的设置,以确保系统能够及时发现和处理故障,避免损坏设备。
总之,伺服驱动器参数设置是一个复杂而又关键的工作,它直接影响到系统的控制精度和稳定性。
在进行参数设置时,我们需要充分了解伺服驱动器和电机的性能特点,根据实际的应用需求来进行调整,以确保系统能够达到最佳的性能。
希望本文能够帮助您正确地配置伺服驱动器,提高系统的控制精度和稳定性。
山洋RS2伺服参数设置
山洋R2系列伺服参数设置一、按键说明:(模式键):按一次,模式变换一个;(上键):在当前光标位置时,按一次数据增加1;(下键盘):在当前光标位置时,按一次数据减1;修改用户参数:/光标键):选择光标位置,确认当前模式并进入当前模式的编辑画面,保存数据时,按一秒钟以上。
二、修改用户参数:1、按“MODE”键,选择“Gr000”;2、用光标键选择需要修改的参数;3、用上键或下键修改数字;4、选好参数组后,按确认键进入参数编辑画面;5、用光标键“上键或下键”修改参数后,按确认键,待光标不闪电式时参数已保存;6、按“MODE”键退出编辑画面。
三、RS2系列的参数Gr 0.00 设为02 (手动增益模式)Gr 1.02 设为80 (KP1位置环增益值调整)Gr 1.12 设为100 (KVP1速度环增益值调整)Gr 1.13 设为20 (TVI1速度环积分时间常数值调整)Gr 1.14 设为100 (JRAT1负载惯量百分比值调整)Gr 8.00 设为00 (CMDPOL电机旋转方向调整,07为反方向)Gr 8.10 设为00(正反转脉冲),02为脉冲+方向(PMOD位置指令方式选择)Gr 8.12 设为00-07 (位置指令脉冲数字滤波器调整,R电机请设为07)Gr 8.13 设为电子齿轮的分子Gr 8.14设为电子齿轮的分母Gr 8.29设为速度控制模式下电压/转速设定,一般设为200rpm / VGr 9.00 设为0C(正传超程屏蔽)Gr 9.01 设为0A(反传超程屏蔽)Gr 9.05 设为01(SON内部使能)Gr C.04 设为2000/32768(电机转一圈驱动器反馈给上位电脑2000脉冲)Gr C.05 设为驱动器反馈编码器的A和Z相信号的极性Gr C.06 设为00(32768);01(8192)(电机转一圈驱动器可以反馈给上位电脑的脉冲数)Gr C.08 设为01(针对R系列电机)四、系统参数SY01 设为00为3相200V,01为单相200V。
山洋伺服电机RS2快速入门手册

CONT4
34
Off : 正常状态
On : 清零状态
CONT5(引脚33) : 限位(反向)
CONT5 33
Off : 碰到限位开关 On :正常状态 CONT6(引脚32) : 限位(正向)
CONT6
32
Off : 碰到限位开关 On :正常状态
通用输入接线: CONT1通用输入接线: CONT1-6 - 2
点击 “Servo On”,电机准 备运行 7段数码管的动作像在写 “8” 字。
点击一次此按钮, 电机正向运行, 并且在到达设定距离后停止。
点击一次此按钮, 电机反向运行, 并且在到达设定距离后停止。
定位操作 - 5
运行2次,3次或3次以上的一次点击... 1. 点击这里
2.多出两个参数出现在这 里
如何改参数如何改参数- 4
多个参数可以通过点击 一次 “Write to amplifier” 图标保存
电机参数设定
电机参数区
1.点击“Select from the list”(M) 按钮
2. 从这个列表中选择 旋转/直线电机, 输入电压 值, 驱动器容量以及电机部分型号 3. 点击 OK 4. 点击 “Write to amplifier” 图标 (与其他参数设置一样)
默认分配:
CONT7(引脚13,14) : 扭矩限制 Off : 无限制On : 限制 CONT8(引脚15,16) : 报警复位 Off : 正常状态On : 复位状态
TTL 信号
控制器单元 双绞线 13 14 38 SG 伺服驱动器 1.0k CONT7 150ohm CONT7 1.0k 1.0k 等效于 HD26C32 1.5k 1.0k
09
伺服驱动器参数设置方法

伺服驱动器参数设置方法第一步:了解伺服电机与伺服驱动器的技术参数在设置伺服驱动器参数之前,首先要了解伺服电机与伺服驱动器的技术参数,包括额定电压、额定电流、最大转速、分辨率等。
这些参数通常可以在产品说明书或技术手册中找到。
第二步:设置伺服驱动器的基本参数1.设置电压和电流参数:根据伺服电机的额定电压和额定电流,将伺服驱动器的电压和电流参数设置为相应数值。
这些参数通常可以在伺服驱动器的参数设置界面中进行操作。
2.设置反馈装置参数:大多数伺服电机都配备了反馈装置,如编码器或脉冲发生器。
需要将伺服驱动器与反馈装置进行连接,并设置相应的参数,以使伺服驱动器能够正确读取反馈信号。
3.设置速度和加速度参数:根据应用需求,设置伺服驱动器的最大转速和加速度参数。
这些参数的设置将影响伺服电机的运动速度和加速度。
第三步:进行运动控制参数的设置1.设置运动模式:伺服驱动器通常支持多种运动模式,如位置模式、速度模式和力矩模式等。
根据应用需求,选择相应的运动模式,并进行参数设置。
2.设置位置控制参数:对于位置模式,需要设置位置控制参数,如目标位置、运动速度和加速度等。
这些参数的设置将决定伺服电机的位置运动特性。
3.设置速度控制参数:对于速度模式,需要设置速度控制参数,如目标速度和加速度等。
这些参数的设置将决定伺服电机的速度运动特性。
第四步:进行系统参数调试和优化在设置完基本参数和运动控制参数之后,需要进行系统参数调试和优化,以确保伺服电机的运动控制性能达到最佳状态。
1.进行闭环控制调试:伺服驱动器通常具有闭环控制功能,可以实现对伺服电机的位置、速度和力矩等参数的闭环控制。
通过调整闭环控制参数,可以优化伺服电机的运动控制性能。
2.进行运动轨迹校准:伺服驱动器可以通过运动轨迹校准功能,校准伺服电机的位置和速度准确性。
根据实际应用需求,进行运动轨迹校准,以提高运动精度。
3.进行系统性能测试:对设置好的伺服驱动器系统进行性能测试,如运动精度、响应时间和系统稳定性等。
三菱伺服马达调机步骤概要

三菱伺服馬達調機步驟本文以 Mitsubishi 泛用型 AC servo motor 為安裝對象 , 介紹安裝及調整步驟。
1. 安裝圖 1 馬達安裝接線圖馬達與 Driver 接線圖如圖 1所示 , 安裝與調機時接線請參照此接線圖,第一次啟動馬達運轉時,請確認連接是否正確。
2. 信號與配線在位置控制模式下, Driver 標準接線圖如圖 2所示。
根據 Driver 與控制器連轉接板接線表需按表 1連接,以確保控制命令與回受訊號能正確的送出與接收。
圖 2 Driver控制訊號線接線圖表 1接線腳位列表3. 參數介紹Mitsubishi 泛用型 AC servo motor可設定之參數大致可分為三個部份,分別是基本參數、擴張參數Ⅰ、擴張參數Ⅱ:3.1. 基本參數基本參數共有 20個,其內容如表 2所示。
表 2 基本參數3.2. 擴張參數Ⅰ擴張參數Ⅰ共有 30個,其內容如表 3所示。
表 3 擴張參數Ⅰ3.3. 擴張參數Ⅱ擴張參數Ⅱ共有 27個,其內容如表 4所示。
表 4 擴張參數4. 基本運轉操作目前完成了安裝與線路連接 , 若要啟動馬達使其試運轉則還有一些基本參數待設定,根據下列順序一一調整至適應值。
A. 參數 19:首先需將所有參數設定在可讀寫之狀態下,將參數 19設定為 (000E,如此便可對所有參數進行修改。
B. 參數 0:在位置控制模式下,視回生電阻使用狀況 (通常不使用 , 參數 0建議設定為 (0000。
C. 參數 1:機能選擇參數,一般使用增量系統,無剎車訊號時,使用初始設定值(0002。
D. 電子齒輪比:齒輪比設定使用參數 3(CMX及參數 4(CDV,一般計算如 (式1 、 (式2 所示,先決定機器之最小移動量,根據機構設計可求出每轉所需送出之pulse 數 1f (式 1 ,再搭配馬達之解析能力,利用 (式 2 可求得電子齒輪比。
電子齒輪比設定範圍為500501≤≤CDVCMX 。
伺服驱动器8大参数设置
伺服驱动器8大参数设置伺服驱动器是一种用于控制伺服电机的装置,通过调节驱动器的参数来实现对电机运行的控制。
不同的参数设置对于电机的性能和运行效果有着直接的影响,因此了解并正确设置这些参数十分重要。
以下是伺服驱动器的八大参数设置。
1.角度标定参数:这些参数用于标定伺服电机的转动角度,通常包括电机的旋转方向、偏移和零点位置等信息。
正确设置这些参数可以保证电机的运行方向和精确度。
2.速度参数:这些参数用于控制伺服电机的运行速度,包括最大速度、加速度和减速度等信息。
通过正确设置这些参数,可以实现电机在不同速度下的稳定运行和高效控制。
3.位置参数:这些参数用于控制伺服电机的位置控制,包括位置偏移、位置误差和位置补偿等信息。
正确设置这些参数可以实现电机的准确定位和稳定控制。
4.力矩参数:这些参数用于控制伺服电机的输出力矩,包括最大力矩、力矩响应和力矩误差等信息。
通过正确设置这些参数,可以实现电机对外部负载的稳定输出和精确控制。
5.反馈参数:这些参数用于控制伺服电机的反馈信号,包括位置反馈、速度反馈和力矩反馈等信息。
正确设置这些参数可以实现电机的闭环控制和精确的运动控制。
6.控制参数:这些参数用于控制伺服电机的控制模式和控制策略,包括位置控制、速度控制和力矩控制等信息。
通过正确设置这些参数,可以实现不同的控制方式和控制策略。
7.过流参数:这些参数用于控制伺服电机的过流保护和限流功能,包括过流保护电流、过流保护时间和限流系数等信息。
正确设置这些参数可以保护电机免受过流损坏,并提高电机的使用寿命。
8.报警参数:这些参数用于控制伺服电机的报警功能,包括故障报警、过载报警和过热报警等信息。
通过正确设置这些参数,可以及时检测和处理电机的故障和异常情况,保证电机的安全和可靠运行。
在设置伺服驱动器的参数时,需要根据具体的应用需求和电机的性能要求来进行调整。
同时,还需要注意参数设置的合理性和稳定性,避免出现意外的故障和不稳定的运行情况。
山洋RS1伺服调试快速入门手册27页PPT
42、只有在人群中间,才能认识自 己。——德国
43、重复别人所说的话,只需要教育; 而要挑战别人所说的话,则需要头脑。—— 玛丽·佩蒂博恩·普尔
44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
45、自己的饭量自己知道。——苏联
山洋RS1伺服调试快速入门手册
16、自己选择的路、跪着也要把它走 完。 17、一般情况下)不想三年以后的事, 只想现 在的事 。现在 有成就 ,以后 才能更 辉煌。
18、敢于向黑暗宣战的人,心里必须 充满光 明。 19、学习的关键--重复。
20、懦弱的人只会裹足不前,莽撞的 人只能 引为烧 身,只 有真正 勇敢的 人才能 所向披 靡。
山洋伺服电机RS1快速入门手册

参数设定软件
SMC Pneumatics (H.K.) Ltd.
SMC Pneumatics (H.K.) Ltd.
设置山洋伺服马达参数的一般步骤
一.设定通信参数,与伺服马达驱动器连线。 二.选择伺服马达型号。 选择正确的伺服马达型号,如果型号不正确可能伺服马达不能 正常地运行。 三.设置系统参数。 选择伺服马达的供电电压,电机编码器类型,控制模式,再生 电阻等系统参数。 四.设置通常参数。 设定位置环增益,速度环增益,负载惯量,电子齿轮比,通常 输入、输出信号等参数。
SMC Pneumatics (H.K.) Ltd.
五.常用参数设置(附表)。
SMC Pneumatics (H.K.) Ltd.
培训完
SMC Pneumatics (H.K.) Ltd.
接线图 (1)
SMC Pneumatics (H.K.) Ltd.
山洋R系列伺服马达同松下FPX-C30T PLC接线图
接线图 (2)
绝对式的编码器接线图
SMC Pneumatics (H.K.) Ltd.
接线图 (3)
SMC Pneumatics (H.K.) Ltd.
说明:当该设定值越大,马达定位的时间越长。对于负载较重, 反应速度不是太快的时候,可适当地增大该值,以满足要求。
4.Page15:JPAT1 负载惯量比1。
说明:当该设定值太小时,马达可能很容易转动,此时可以适当 地调大该值,直到马达不发生振动为止。
SMC Pneumatics (H.K.) Ltd.
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第1组参数。
1. Page02:KP1 位置环比例增益1。
伺服重要参数设置

位置指令脉冲分频分子(PA12)/位置指令脉冲分频分母(PA13)=4×2500(编码器条纹数)/带轮比×丝杠螺距×1000×2
例:X轴丝杠螺距为4mm,1:1传动;Z轴丝杠螺距为6mm,1:2减速传动,则X轴驱动器的电子齿轮比为PA12/PA13=4×2500/(1×4×1000×2)=5/4。
(1)电动机窜动:在进给时出现窜动现象,测速信号不稳定,如编码器有裂纹;接线端子接触不良,如螺钉松动等;当窜动发生在由正方向运动与反方向运动的换向瞬间时,一般是由于进给传动链的反向问隙或伺服驱动增益过大所致;
(2) 电动机爬行:大多发生在起动加速段或低速进给时,一般是由于进给传动链的润滑状态不良,伺服系统增益低及外加负载过大等因素所致。尤其要注意的是,伺服电动机和滚珠丝杠联接用的联轴器,由于连接松动或联轴器本身的缺陷,如裂纹等,造成滚珠丝杠与伺服电动机的转动不同步,从而使进给运动忽快忽慢;
再有,因为交流伺服单元通常使用数控系统统一供电系统,三相交流220 V的电压来自伺服变压器。所以在操作过程中必须符合操作规范。例如:U、V、W三相输出必须按照正确的顺序连接,否则电动机将不能正常运转,将给出报警信号,并禁止电动机运行。
此外,还可以利用报警表(表2)提示来处理故障。
5 伺服电动机的其他问题处理技巧
1 KNDSD100基本性能
1.1 基本功能
SD100采用国际上先进的数字信号处理器(DSP)TM320(S240)、大规模可编程门阵列(FPGA)、日本三菱的新一代智能化功率模块(1PM),集成度高,体积小,具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。
与步进电动机相比,交流伺服电动机无失步现象。伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。调速比宽 1:5000,转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。采用全数字控制,控制简单灵活。用户通过参数修改可以对伺服的工作方式、运行特性作出适当的设置。目前价格仅比步进电动机高2000~3000元。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
调整R 系列山洋伺服马达参数说明
注:“○”为必须设置项;“△”为根据实际需要选设项;“╳”为不适用
以上通常用到的伺服马达参数,若有不明白或者其它参数请参考使用说明书
编码器接线:粉红---1 紫色---2 棕色
蓝色---14 红色---19 黑色---20
是否有干扰判断:
观察Monitor display中OA,OC项数据是否相等,0C为外部输入的脉冲.如果PLC没有发脉冲时此值有变
要选设项;“╳”为不适用
不明白或者其它参数请参考使用说明书
棕色----13
黑色---20
是否相等,0C为外部输入的脉冲.如果PLC没有发脉冲时此值有变化,说明有外部干扰。