第4章-1振动
大学物理——第4章-振动和波

合成初相 与计时起始时刻有关.
v A 2
ω
v A
2
O
x2
1
v A 1
x1
xx
分振动初相差2 1与计时起始时刻无关,但它对合成振幅 是相长还是相消合成起决定作用.
20
讨 论
2 A = A2 + A2 + 2A A2 cos(2 1) 1 1
F = kx
3
l0
k
m
A
F = kx = ma
k 令ω = m
2
A x = Acos(ωt +)
o
x
积分常数,根据初始条件确定
a = ω2 x
dx = ω2 x dt 2
2
dx υ = = Aω sin( ωt +) dt
dx 2 a = 2 = Aω cos(ωt +) dt
4
2
x = Acos(ωt +)
15
π
例 4-3 有两个完全相同的弹簧振子 A 和 B,并排的放在光滑 的水平面上,测得它们的周期都是 2s ,现将两个物体从平衡 位置向右拉开 5cm,然后先释放 A 振子,经过 0.5s 后,再释 放 B 振子,如图所示,如以 B 释放的瞬时作为时间的起点, (1)分别写出两个物体的振动方程; (2)它们的相位差是多少?分别画出它们的 x—t 图.
5cm
O
x
16
解: (1)振动方程←初始条件
x0 = 0.05m, υ0 = 0 , T = 2s
2π ω= = π rad/s T
2 υ0 2 A = x0 + 2 = 0.05m ω υ0 对B振子: tan B = = 0 B = 0 x0ω
大物习题答案第4章机械振动

第4章 机械振动基本要求1.掌握描述简谐振动的振幅、周期、频率、相位和初相位的物理意义及之间的相互关系2.掌握描述简谐振动的解析法、旋转矢量法和图线表示法,并会用于简谐振动规律的讨论和分析3.掌握简谐振动的基本特征,能建立一维简谐振动的微分方程,能根据给定的初始条件写出一维简谐振动的运动方程,并理解其物理意义4.理解同方向、同频率简谐振动的合成规律,了解拍和相互垂直简谐振动合成的特点基本概念1.简谐振动 离开平衡位置的位移按余弦函数(或正弦函数)规律随时间变化的运动称为简谐振动。
简谐振动的运动方程 cos()x A t ωϕ=+2.振幅A 作简谐振动的物体的最大位置坐标的绝对值。
3.周期T 作简谐振动的物体完成一次全振动所需的时间。
4.频率ν 单位时间内完成的振动次数,周期与频率互为倒数,即1T ν=5.圆频率ω 作简谐振动的物体在2π秒内完成振动的次数,它与频率的关系为22Tπωπν== 6.相位和初相位 简谐振动的运动方程中t ωϕ+项称为相位,它决定着作简谐振动的物体状态;t=0时的相位称为初相位ϕ7.简谐振动的能量 作简谐振动的系统具有动能和势能。
弹性势能222p 11cos ()22E kx kA t ωϕ==+动能[]22222k 111sin()sin ()222E m m A t m A t ωωϕωωϕ==-+=+v弹簧振子系统的机械能为222k p 1122E E E m A kA ω=+==8.阻尼振动 振动系统因受阻尼力作用,振幅不断减小。
9.受迫振动 系统在周期性外力作用下的振动。
周期性外力称为驱动力。
10.共振 驱动力的角频率为某一值时,受迫振动的振幅达到极大值的现象。
基本规律1.一个孤立的简谐振动系统的能量是守恒的物体做简谐振动时,其动能和势能都随时间做周期性变化,位移最大时,势能达到最大值,动能为零;物体通过平衡位置时,势能为零,动能达到最大值,但其总机械能却保持不变,且机械能与振幅的平方成正比。
第4章 振动系统的运动微分方程

(d)
分析杆 AB ,列写 AB 的运动微分方程,如图(c)
m2 &x&C = − X A
(e)
m2 &y&C = −YA − m2 g
(f)
1 12
m2l 2ϕ&&
=
X
A
l 2
cosϕ
+ YA
l 2
sin ϕ
(g)
运动学方程
xC
=
xA
+
l 2
sin
ϕ
,
x&C
=
x& A
+
l ϕ& cosϕ 2
yC
=
−
l cosϕ , 2
y& C
=
l ϕ& sinϕ 2
&x&C
=
&x&A
−
l ϕ& 2 2
sin ϕ
+
l ϕ&& cosϕ 2
(h)
&y&C
=
l ϕ&& sin ϕ 2
+
l ϕ& 2 2
cos ϕ
(i)
上述 9 个方程包含 &x&A ,ε , &x&C , &y&C ,ϕ&&, X A ,YA , F, N 等 9 个未知量,由上述 9 个方程消去
解:系统具有两个自由度,选图示 AB 与铅垂线的夹角ϕ 及圆轮中心 A 的位移 xA 为广
义坐标。
分析圆轮 A ,受力图如图(b)所示。列写圆轮 A 的运动微分方程:
汽车振动基础第4章-多自由度(定稿)
k11 k1 x1 k2 x1 k1 k2
k21 k12 k2 x1 k2
k22 k2 x2 k3 x2 k2 k3
j2
k31 k13 0
k32 k23 k3 x2 k3
0 k1 k 2 k 2 K k 2 k 2 k3 k3 0 k3 k3
– 拉格朗日法
• 方程的形式
广义坐标
qi (i 1, 2,3,, n)
T:系统的总动能
d T T ( ) Qi 0 dt qi qi
i 1, 2,3, , n
对应于第i个广义 坐标的广义力
– 保守系统
» 系统作用的主动力仅为势力 Qi
d T T U ( ) 0 dt qi qi qi
m2 m22 m3 4
④柔度矩阵的影响系数法
F ij
柔度影响系数 ij 的意义是在第j个坐标上施加单位力作用时,在第i个坐 标上引起的位移。 例题4-8 用影响系数法求图示系统的柔度矩阵
11 F 21 31
12 22 32
13 23 33
也可写成 其中
或
或
MX KX 0
力方程 位移方程
K 1MX X 0
m x 0 或 x
称为柔度,而
FMX X 0
1 称为柔度矩阵
1 k
FK
②刚度矩阵的影响系数法
K kij
刚度影响系数 k 的意义是使系统的第j个坐标产生单位位移,而其它的 ij 坐标位移为零时,在第i个坐标上所施加的作用力的大小。
仅代表外部激励 广义力
第4章_振动与波动 (1)
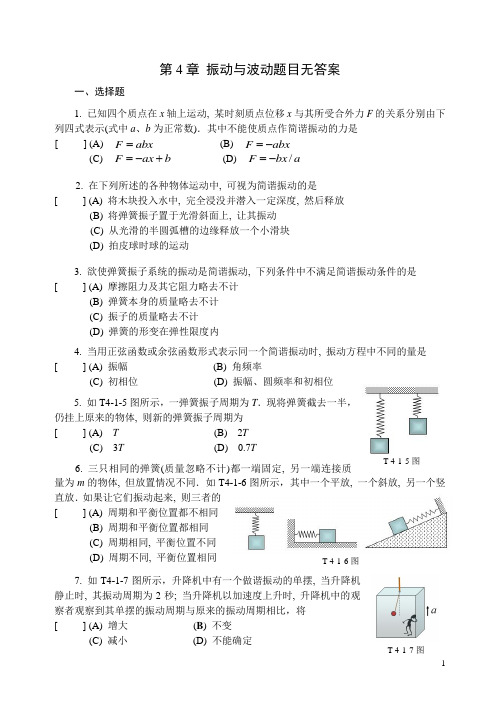
第4章 振动与波动题目无答案一、选择题1. 已知四个质点在x 轴上运动, 某时刻质点位移x 与其所受合外力F 的关系分别由下列四式表示(式中a 、b 为正常数).其中不能使质点作简谐振动的力是[ ] (A) abx F = (B) abx F -=(C) b ax F +-= (D) a bx F /-=2. 在下列所述的各种物体运动中, 可视为简谐振动的是[ ] (A) 将木块投入水中, 完全浸没并潜入一定深度, 然后释放(B) 将弹簧振子置于光滑斜面上, 让其振动(C) 从光滑的半圆弧槽的边缘释放一个小滑块(D) 拍皮球时球的运动3. 欲使弹簧振子系统的振动是简谐振动, 下列条件中不满足简谐振动条件的是[ ] (A) 摩擦阻力及其它阻力略去不计(B) 弹簧本身的质量略去不计(C) 振子的质量略去不计(D) 弹簧的形变在弹性限度内4. 当用正弦函数或余弦函数形式表示同一个简谐振动时, 振动方程中不同的量是[ ] (A) 振幅 (B) 角频率(C) 初相位 (D) 振幅、圆频率和初相位5. 如T4-1-5图所示,一弹簧振子周期为T .现将弹簧截去一半,仍挂上原来的物体, 则新的弹簧振子周期为[ ] (A) T (B) 2T(C) 3T (D) 0.7T6. 三只相同的弹簧(质量忽略不计)都一端固定, 另一端连接质量为m 的物体, 但放置情况不同.如T4-1-6图所示,其中一个平放, 一个斜放, 另一个竖直放.如果让它们振动起来, 则三者的[ ] (A) 周期和平衡位置都不相同(B) 周期和平衡位置都相同(C) 周期相同, 平衡位置不同 (D) 周期不同, 平衡位置相同7. 如T4-1-7图所示,升降机中有一个做谐振动的单摆, 当升降机静止时, 其振动周期为2秒; 当升降机以加速度上升时, 升降机中的观察者观察到其单摆的振动周期与原来的振动周期相比,将[ ] (A) 增大 (B ) 不变(C) 减小 (D) 不能确定T 4-1-6图T 4-1-7图 T 4-1-5图8. 在简谐振动的运动方程中,振动相位)(ϕω+t 的物理意义是[ ] (A) 表征了简谐振子t 时刻所在的位置(B) 表征了简谐振子t 时刻的振动状态(C) 给出了简谐振子t 时刻加速度的方向(D) 给出了简谐振子t 时刻所受回复力的方向9. 如T4-1-9图所示,把单摆从平衡位置拉开, 使摆线与竖直方向成 θ 角, 然后放手任其作微小的摆动.若以放手时刻为开始观察的时刻,用余弦函数表示这一振动, 则其振动的初位相为 [ ] (A) θ (B) 2π 或π23 (C) 0 (D) π 10. 两质点在同一方向上作同振幅、同频率的简谐振动.在振动过程中, 每当它们经过振幅一半的地方时, 其运动方向都相反.则这两个振动的位相差为[ ] (A) π (B) π32 (C) π34 (D) π54 11. 在简谐振动的速度和加速度表达式中,都有一个负号, 这是意味着[ ] (A) 速度和加速度总是负值(B) 速度的相位比位移的相位超前π21, 加速度的位相与位移的相位相差π (C) 速度和加速度的方向总是相同(D) 速度和加速度的方向总是相反12. 一质点作简谐振动, 振动方程为)cos(ϕω+=t A x . 则在2T t =(T 为振动周期) 时, 质点的速度为[ ] (A) ϕωsin A - (B) ϕωsin A(C) ϕωcos A - (D) ϕωcos A13. 一物体作简谐振动, 其振动方程为)4πcos(+=t A x ω.则在2T t = (T 为周期)时, 质点的加速度为(A) 222ωA - (B) 222ωA (C) 223ωA - (D) 223ωA 14. 一质点以周期T 作简谐振动, 则质点由平衡位置正向运动到最大位移一半处的最短时间为[ ] (A) 6T (B) 8T (C) 12T (D) T 127 15. 某物体按余弦函数规律作简谐振动, 它的初相位为2π3, 则该物体振动的初始状态为[ ] (A) x 0 = 0 , v 0 > 0 (B) x 0 = 0 , v 0<0(C) x 0 = 0 , v 0 = 0 (D) x 0 = -A , v 0 = 0T 4-1-9图16. 一作简谐运动质点的振动方程为π)21π2cos(5+=t x , 它从计时开始, 在运动一个周期后[ ] (A) 相位为零 (B) 速度为零(C) 加速度为零 (D) 振动能量为零17. 沿x 轴振动的质点的振动方程为)1π3cos(1032-⨯=-t x (SI 制), 则[ ] (A) 初相位为1° (B) 振动周期为T =3 s(C) 振幅A = 3 m (D) 振动频率 23=νHz 18. 有一谐振子沿x 轴运动, 平衡位置在x = 0处, 周期为T , 振幅为A ,t = 0时刻振子过2A x =处向x 轴正方向运动, 则其运动方程可表示为 [ ] (A) )21cos(t A x ω= (B) )cos(2t A x ω= (C) )3π2sin(--=T t A x ω (D) )3π2cos(-=T t A x ω 19. 一质点作简谐振动, 其速度随时间变化的规律为t A v ωωcos -=, 则质点的振动方程为[ ] (A) t A x ωsin = (B) t A x ωcos =(C) π)sin(+=t A x ω (D) π)cos(+=t A x ω20. 当一质点作简谐振动时, 它的动能和势能随时间作周期变化.如果f 是质点振动的频率, 则其动能变化的频率为[ ] (A) 4f (B) 2f (C) f (D) f /221. 已知一简谐振动系统的振幅为A , 该简谐振动动能为其最大值之半的位置是[ ] (A) 12A (B) 22A (C) 32A (D) A 22. 一弹簧振子作简谐振动, 其振动方程为: π)21cos(+=t A x ω.则该物体在t = 0时刻的动能与t = T /8 (T 为周期)时刻的动能之比为[ ] (A) 1:4 (B) 2:1 (C) 1:1 (D) 1:223. 一作简谐振动的质点某时刻位移为x , 系统的振动势能恰为振动动能的n 倍, 则该振动的振幅为[ ] (A) A n x =+⎛⎝ ⎫⎭⎪11 (B) A n x =-⎛⎝ ⎫⎭⎪11 (C) A n x =-11 (D) A n x =+1124. 一弹簧振子作简谐振动, 当其偏离平衡位置的位移大小为振幅的1/4时, 其动能为振动总能量的[ ] (A) 167 (B) 1615 (C) 169 (D) 1613 25. 一长为l 、质量为m 的单摆, 与一劲度系数为k 、质量为m 的弹簧振子周期相等.则k 、l 、m 、g 之间的关系为[ ] (A) lmg k = (B) g ml k = (C) gl m k = (D) 不能确定 26. 一轻质弹簧, 上端固定, 下端挂有质量为m 的重物, 其自由端振动的周期为T . 已知振子离开平衡位置为x 时其振动速度为v , 加速度为a , 且其动能与势能相等.试判断下列计算该振子劲度系数的表达式中哪个是错误的?[ ] (A) a mg k = (B) 22xm k v = (C) x ma k = (D) 22π4T m k = 27. 简谐振动的振幅由哪些因素决定?[ ] (A) 谐振子所受的合外力 (B) 谐振子的初始加速度(C) 谐振子的能量和力常数 (D) 谐振子的放置位置28. 设卫星绕地球作匀速圆周运动.若卫星中有一单摆, 下述哪个说法是对的?[ ] (A) 它仍作简谐振动, 周期比在地面时大(B) 它仍作简谐振动, 周期比在地面时小(C) 它不会再作简谐振动(D) 要视卫星运动速度决定其周期的大小29. 已知一单摆装置, 摆球质量为m ,摆的周期为T .对它的摆动过程, 下述说法中错误的是[ ] (A) 按谐振动规律, 摆线中的最大张力只与振幅有关, 而与m 无关(B) T 与m 无关(C) 按谐振动规律, T 与振幅无关(D) 摆的机械能与m 和振幅都有关30. 弹簧振子在光滑水平面上作谐振动时, 弹性力在半个周期内所作的功为[ ] (A) 2kA (B)221kA (C) 241kA (D) 0 T 4-1-26图31. 如果两个同方向同频率简谐振动的振动方程分别为π)433cos(73.11+=t x cm 和 π)413cos(2+=t x cm, 则它们的合振动方程为 [ ] (A) π)433cos(73.0+=t x cm (B) π)413cos(73.0+=t x cm (C) π)1273cos(2+=t x cm (D) π)1253cos(2+=t x cm32. 拍现象是由怎样的两个简谐振动合成的?[ ] (A) 同方向、同频率的两个简谐振动(B) 同方向、频率很大但相差甚小的两个简谐振动(C) 振动方向互相垂直、同频率的两个简谐振动(D) 振动方向互相垂直、频率成整数倍的两个简谐振动合成33. 两个同方向、同频率、等振幅的谐振动合成, 如果其合成振动的振幅仍不变, 则此二分振动的相位差为[ ] (A) 2π (B) 3π2 (C) 4π (D) π 34. 二同频率相互垂直的振动方程分别为)cos(11αω+=t A x 和)cos(22αω+=t A y .其合振动的轨迹[ ] (A) 不会是一条直线(B) 不会为一个圆(C) 不能是一封闭曲线(D) 曲线形状要由相位差和两振动振幅而定35. 下面的结论哪一个可以成立?[ ] (A) 一个简谐振动不可以看成是两个同频率相互垂直谐振动的合振动(B) 一个简谐振动只可以看成是两个同频率同方向谐振动的合振动(C) 一个简谐振动可以是两个同频率相互垂直谐振动的合振动(D) 一个简谐振动只可以是两个以上同频率谐振动的合振动36. 一质点同时参与两个相互垂直的简谐振动, 如果两振动的振动方程分别为π)π2cos(+=t x 和)π2sin(t y =, 则该质点的运动轨迹是[ ] (A) 直线 (B) 椭圆 (C) 抛物线 (D) 圆37. 将一个弹簧振子分别拉离平衡位置1厘米和2厘米后, 由静止释放(弹簧形变在弹性范围内), 则它们作谐振动的[ ] (A) 周期相同 (B) 振幅相同(C) 最大速度相同 (D) 最大加速度相同38. 谐振子作简谐振动时, 速度和加速度的方向[ ] (A) 始终相同(B) 始终相反(C) 在某两个1/4周期内相同, 另外两个1/4周期内相反(D) 在某两个1/2周期内相同, 另外两个1/2周期内相反39. 下列说法正确的是[ ] (A) 谐振子从平衡位置运动到最远点所需的时间为T 81(B) 谐振子从平衡位置运动到最远点的一半距离所需时间为8T (C) 谐振子从平衡位置出发经历T 121,运动的位移是A 31 (D) 谐振子从平衡位置运动到最远点所需的时间为T 4140. 关于振动和波, 下面几句叙述中正确的是[ ] (A) 有机械振动就一定有机械波(B) 机械波的频率与波源的振动频率相同(C) 机械波的波速与波源的振动速度相同(D) 机械波的波速与波源的振动速度总是不相等的41. 关于波,下面叙述中正确的是[ ] (A) 波动方程中的坐标原点一定要放在波源位置(B) 机械振动一定能产生机械波(C) 质点振动的周期与波的周期数值相等(D) 振动的速度与波的传播速度大小相等42. 按照定义,振动状态在一个周期内传播的距离就是波长.下列计算波长的方法中错误的是[ ] (A) 用波速除以波的频率(B) 用振动状态传播过的距离除以这段距离内的波数(C) 测量相邻两个波峰的距离(D) 测量波线上相邻两个静止质点的距离43. 一正弦波在海面上沿一定方向传播, 波长为λ, 振幅为A , 波的传播速率为u . 假设海面上漂浮的一块木块随水波上下运动, 则木块上下运动的周期是[ ] (A) u π2λ (B) uλ (C) λπ2u (D) λu 1 44. 当x 为某一定值时, 波动方程)π(2cos λx T t A x -=所反映的物理意义是 [ ] (A) 表示出某时刻的波形 (B) 说明能量的传播(C) 表示出x 处质点的振动规律 (D) 表示出各质点振动状态的分布45. 下列方程和文字所描述的运动中,哪一种运动是简谐振动?[ ] (A) x A t =1cos ω(B) x A t A t =+123cos cos ωω(C) d d 2222xt x =-ω(D) 两个同方向、频率相近的谐振动的合成46. 下列方程和文字所描述的运动中,哪一种运动是简谐波?[ ] (A) t xA y ωλcos π2cos =(B) )sin(2x cx bt A y ++=(C) 波形图始终是正弦或余弦曲线的平面波(D) 波源是谐振动但振幅始终衰减的平面波47. 下列函数f ( x , t )可以用来表示弹性介质的一维波动, 其中a 和b 是正常数.则下列函数中, 表示沿x 轴负方向传播的行波是[ ] (A) )sin(),(bt ax A t x f += (B) )sin(),(bt ax A t x f -=(C) )cos()cos(),(bt ax A t x f = (D) )sin()sin(),(bt ax A t x f =48. 已知一波源位于x = 5m 处, 其振动方程为: )cos(ϕω+=t A y m .当这波源产生的平面简谐波以波速u 沿x 轴正向传播时, 其波动方程为[ ] (A) )(cos u x t A y -=ω (B) ])(cos[ϕω+-=ux t A y (C) ])5(cos[ϕω++-=u x t A y (D) ])5(cos[ϕω+--=u x t A y 49. 一平面简谐波的波动方程为)2π(sin 5.0x t y --=m, 则此波动的频率、波速及各质点的振幅依次为[ ] (A)21、21、05.0- (B) 21、1、05.0- (C) 21、21、0.05 (D)2、2、0.0550. 已知一列机械波的波速为u , 频率为ν, 沿着x 轴负方向传播.在x 轴的正坐标上有两个点x 1和x 2.如果x 1<x 2 , 则x 1和x 2的相位差为[ ] (A) 0 (B) )(π221x x u -ν (C) π (D) )(π212x x u-ν51. 已知一平面余弦波的波动方程为)01.05.2π(cos 2x t y -=, 式中 x 、y 均以厘米计.则在同一波线上, 离x = 5cm 最近、且与 x = 5cm 处质元振动相位相反的点的坐标为[ ] (A) 7.5 cm (B) 55 cm (C) 105 cm (D) 205 cm52. 两端固定的一根弦线, 长为2m, 受外力作用后开始振动.已知此弦产生了一个波腹的波, 若该振动的频率为340 Hz, 则此振动传播的速度是____m ⋅s -1.[ ] (A) 0 (B) 170 (C) 680 (D) 136053. 一波源在XOY 坐标系中(3, 0)处, 其振动方程是)π120cos(t y = cm, 其中 t 以秒计, 波速为50 cm.s -1 .设介质无吸收, 则此波在x <3 cm 的区域内的波动方程为[ ] (A) )50π(120cos x t y +=cm (B) π]2.7)50π(120cos[-+=x t y cm (C) )50π(120cos x t y -=cm (D) π]2.1)50π(120cos[-+=x t y cm54. 若一平面简谐波的波动方程为)cos(cx bt A y -=, 式中A 、b 、c 为正值恒量.则[ ] (A) 波速为c (B) 周期为b 1 (C) 波长为c π2 (4) 角频率为bπ2 55. 一平面简谐横波沿着OX 轴传播.若在OX 轴上的两点相距8λ(其中λ为波长), 则在波的传播过程中, 这两点振动速度的[ ] (A) 方向总是相同 (B) 方向有时相同有时相反(C) 方向总是相反 (D) 大小总是不相等56. 一简谐波沿Ox 轴正方向传播,t =0时刻波形曲线如左下图所示,其周期为2 s .则P 点处质点的振动速度v 与时间t 的关系曲线为:[ ]57. 当波动方程为)01.05.2π(cos 20x t y +=cm 的平面波传到x =100cm 处时, 该处质点的振动速度为[ ] (A) )π5.2sin(50t cm.s -1 (B) )π5.2sin(50t -cm.s -1(C) )π5.2sin(π50t cm.s -1 (D) )π5.2sin(π50t -cm.s -1Aω)D ω)ω-ω-))58. 平面简谐机械波在弹性媒质中传播时, 在传播方向上某媒质元在负的最大位移处, 则它的能量是[ ] (A) 动能为零, 势能最大 (B) 动能为零, 势能为零(C) 动能最大, 势能最大 (D) 动能最大, 势能为零59. 一平面简谐波在弹性媒质中传播, 在媒质元从最大位移处回到平衡位置的过程中[ ] (A) 它的势能转换成动能(B) 它的动能转换成势能(C) 它从相邻的一段媒质元中获得能量, 其能量逐渐增大(D) 它把自己的能量传给相邻的一媒质元, 其能量逐渐减小60. 已知在某一媒质中两列相干的平面简谐波的强度之比是421=I I ,则这两列波的振幅之比21A A 是 [ ] (A) 4 (B) 2 (C) 16 (D) 861. 一点波源发出的波在无吸收媒质中传播, 波前为半球面, 该波强度I 与离波源距离r 之间的关系是[ ] (A) r I 1∝ (B) 31r I ∝ (C) r I 1∝ (D) 21r I ∝ 62. 当机械波在媒质中传播时, 某一媒质元的最大形变发生在(其中A 是振幅)[ ] (A) 媒质质元离开其平衡位置的最大位移处(B) 媒质质元离开平衡位置2/2A 处(C) 媒质元在其平衡位置处(D) 媒质元离开平衡位置2/A 处63. 假定汽笛发出的声音频率由 400 Hz 增加到1200 Hz, 而波幅保持不变, 则1200 Hz 声波对400 Hz 声波的强度比为[ ] (A) 1:3 (B) 3:1 (C) 1:9 (D) 9:164. 为了测定某个音叉C 的频率, 另选取二个频率已知而且和C 音叉频率相近的音叉A 和B, 音叉A 的频率为400 Hz, B的频率为397 Hz, 并进行下列实验: 使A 和C 同时振动每秒听到声音加强二次; 再使B 和C 同时振动, 每秒钟听到声音加强一次, 由此可知音叉C 的振动频率为[ ] (A) 401 Hz (B) 402 Hz (C) 398 Hz (D) 399 Hz65. 人耳能分辨同时传来的不同声音, 这是由于[ ] (A) 波的反射和折射 (B) 波的干涉(C) 波的独立传播特性 (D) 波的强度不同66. 两列波在空间P 点相遇, 若在某一时刻观察到P 点合振动的振幅等于两波的振幅之和, 则这两列波[ ] (A) 一定是相干波 (B) 不一定是相干波(C) 一定不是相干波 (D) 一定是初相位相同的相干波67. 有两列波在空间某点P 相遇, 某时刻观察到P 点的合振幅等于两列波的振幅之和, 由此可以判定这两列波[ ] (A) 是相干波 (B) 相干后能形成驻波(C) 是非相干波 (D) 以上三种情况都有可能68. 已知两相干波源所发出的波的相位差为π, 到达某相遇点P 的波程差为半波长的两倍, 则P 点的合成情况是[ ] (A) 始终加强(B) 始终减弱(C) 时而加强, 时而减弱, 呈周期性变化(D) 时而加强, 时而减弱, 没有一定的规律69. 两个相干波源连线的中垂线上各点[ ] (A) 合振动一定最强(B) 合振动一定最弱(C) 合振动在最强和最弱之间周期变化(D) 只能是在最强和最弱之间的某一个值70. 两初相位相同的相干波源, 在其叠加区内振幅最小的各点到两波源的波程差等于[ ] (A) 波长的偶数倍 (B) 波长的奇数倍(C) 半波长的偶数倍 (D) 半波长的奇数倍71. 在驻波中, 两个相邻波节间各质点的振动是[ ] (A) 振幅相同, 相位相同 (B) 振幅不同, 相位相同(C) 振幅相同, 相位不同 (D) 振幅不同, 相位不同72. 两列完全相同的余弦波左右相向而行, 叠加后形成驻波.下列叙述中, 不是驻波特性的是[ ] (A) 叠加后, 有些质点始终静止不动(B) 叠加后, 波形既不左行也不右行(C) 两静止而相邻的质点之间的各质点的相位相同(D) 振动质点的动能与势能之和不守恒73. 平面正弦波)π3π5sin(4y t x +=与下面哪一列波相叠加后能形成驻波?[ ] (A) )2325π(2sin 4x t y += (B) )2325π(2sin 4x t y -=(C) )2325π(2sin 4y t x += (D) )2325π(2sin 4y t x -= 74. 方程为)π100cos(01.01x t y -=m 和)π100cos(01.02x t y +=m 的两列波叠加后, 相邻两波节之间的距离为[ ] (A) 0.5 m (B) 1 m (C) π m (D) 2π m75. 1S 和2S 是波长均为λ的两个相干波的波源,相距3λ/4,1S 的相位比2S 超前2π.若两波单独传播时,在过1S 和2S 的直线上各点的强度相同,不随距离变化,且两波的强度都是0I ,则在1S 、2S 连线上1S 外侧和2S 外侧各点,合成波的强度分别是[ ] (A) 04I ,04I ; (B) 0,0;(C) 0,04I ; (D) 04I ,0.76. 在弦线上有一简谐波,其表达式为⎥⎦⎤⎢⎣⎡-⎪⎭⎫ ⎝⎛+⨯=-3π420π100cos 100.221x t y (SI)为了在此弦线上形成驻波,并且在x =0处为一波腹,此弦线上还应有一简谐波,其表达式为:[ ] (A) ⎥⎦⎤⎢⎣⎡+⎪⎭⎫ ⎝⎛-⨯=-3π20π100cos 100.222x t y (SI) (B) ⎥⎦⎤⎢⎣⎡+⎪⎭⎫ ⎝⎛-⨯=-3π420π100cos 100.222x t y (SI) (C) ⎥⎦⎤⎢⎣⎡-⎪⎭⎫ ⎝⎛-⨯=-3π20π100cos 100.222x t y (SI)(D) ⎥⎦⎤⎢⎣⎡-⎪⎭⎫ ⎝⎛-⨯=-3π420π100cos 100.222x t y (SI) 二、填空题1. 一质点沿x 轴作简谐振动,平衡位置为x 轴原点,周期为T ,振幅为A , (1) 若t = 0 时质点过x = 0处且向x 轴正方向运动,则振动方程为x = . (2) 若t = 0时质点在x = A /2处且向x 轴负方向运动,则质点方程为x = .2. 据报道,1976年唐山大地震时,当地居民曾被猛地向上抛起2m 高.设此地震横波为简谐波,且频率为1Hz ,波速为3km ⋅s -1, 它的波长是 ,振幅是 .3. 一质点沿x 轴作简谐振动, 其振动方程为: π)31π2cos(4-=t x cm .从t =0时刻起, 直到质点到达 2-=x cm 处、且向 x 轴正方向运动的最短时间间隔为 .4. 一个作简谐振动的质点,其谐振动方程为π)23cos(π1052+⨯=-t x (SI 制).它从计时开始到第一次通过负最大位移所用的时间为 .5. 一单摆的悬线长l =1.3m, 在顶端固定点的铅直下方0.45m 处有一小钉,如T4-2-5图所示.设两方摆动均较小,则单摆的左右两方角振幅之比21θθ的近似值为 . 6. 一质点作简谐振动, 频率为2Hz .如果开始时质点处于平衡位置, 并以π m.s -1的速率向x 轴的负方向运动, 则该质点的振动方程为 .7. 一谐振动系统周期为0.6s, 振子质量为200g .若振子经过平衡位置时速度为12cm.s -1, 则再经0.2s 后该振子的动能为 .8.劲度系数为100N ⋅m -1的轻质弹簧和质量为10g 的小球组成一弹簧振子. 第一次将小球拉离平衡位置4cm, 由静止释放任其振动; 第二次将小球拉离平衡位置2cm 并给以2m.s -1的初速度任其振动.这两次振动的能量之比为 .9. 将一个质量为20g 的硬币放在一个劲度系数为40N.m -1的竖直放置的弹簧上, 然后向下压硬币使弹簧压缩 1.0cm, 突然释放后, 这个硬币将飞离原来位置的高度为 .10. 质量为0.01 kg 的质点作简谐振动, 振幅为0.1m, 最大动能为0.02 J .如果开始时质点处于负的最大位移处, 则质点的振动方程为 .11. 一物体放在水平木板上,这木板以Hz 2=ν的频率沿水平直线作简谐运动,物体和水平木板之间的静摩擦系数50.0=s μ,物体在木板上不滑动的最大振幅max A = .12. 如果两个同方向同频率简谐振动的振动方程分别为π)3110sin(31+=t x cm 和)π6110sin(42-=t x cm, 则它们的合振动振幅为 [ ] (A) 1 cm (B) 5 cm (C) 7 cm (D) 3 cm13. 已知由两个同方向同频率的简谐振动合成的振动, 其振动的振幅为20cm, 与第一个简谐振动的相位差为6π.若第一个简谐振动的振幅为cm 3.17310=, 则第二个简小钉m45.0l1lT 4-2-5图T 4-1-32图谐振动的振幅为 cm ,两个简谐振动的相位差为 .14. 已知一平面简谐波的方程为: )π(2cos λνxt A y -=, 在ν1=t 时刻λ411=x 与 λ432=x 两点处介质质点的速度之比是 . 15. 一观察者静止于铁轨旁, 测量运行中的火车汽笛的频率.若测得火车开来时的频率为2010 Hz, 离去时的频率为1990 Hz, 已知空气中的声速为330m.s -1, 则汽笛实际频率ν是 .16. 已知一入射波的波动方程为)4π4πcos(5xt y +=(SI 制), 在坐标原点x = 0处发生反射, 反射端为一自由端.则对于x = 0和x = 1米的两振动点来说, 它们的相位关系是相位差为 .17. 有一哨子, 其空气柱两端是打开的, 基频为5000 Hz, 由此可知,此哨子的长度最接近 厘米.18. 一质点同时参与了两个同方向的简谐振动,它们的振动方程分别为)4π/cos(05.01+=t x ω (SI) )12π/19cos(05.02+=t x ω(SI)其合成运动的运动方程为=x .(SI)19. 已知一平面简谐波沿x 轴正向传播,振动周期T = 0.5 s ,波长λ = 10m , 振幅A = 0.1m .当t = 0时波源振动的位移恰好为正的最大值.若波源处为原点,则沿波传播方向距离波源为2/λ处的振动方程为 .当 t = T / 2时,4/λ=x 处质点的振动速度为 .20. T4-2-20图表示一平面简谐波在 t = 2s 时刻的波形图,波的振幅为 0.2m ,周期为4s .则图中P 点处质点的振动方程为 .21. 一简谐波沿BP 方向传播,它在B 点引起的振动方程为t A y π2cos 11=.另一简谐波沿CP 方向传播,它在C 点引起的振动方程为()ππ2cos 22+=t A y .P 点与B 点相AT4-2-20图 T4-2-21图PB1r 2r ...C距0.40m ,与C 点相距0.50m(如T4-2-21图).波速均为u =0.20m ⋅s -1.则两波在P 的相位差为 .22. 如T4-2-22图所示,一平面简谐波沿Ox 轴正方向传播,波长为λ,若1P 点处质点的振动方程为()ϕ+=vt A y π2cos 1,则2P 点处质点的振动方程为 ,与1P 点处质点振动状态相同的那些点的位置是 .23. 一个点波源位于O 点,以O 为圆心作两个同心球面,它们的半径分别为1R 和2R .在两个球面上分别取相等的面积1S ∆和2S ∆,则通过它们的平均能流之比21/P P =_______.24. 一列平面简谐波在截面积为S 的圆管中传播, 其波的表达为)π2(cos λωxt A y -=,管中波的平均能量密度是w , 则通过截面积S 的平均能流是 .25. 两相干波源1S 和2S 的振动方程分别是t A y ωcos 1=和π)21(cos 2+=t A y ω.1S 距P 点3个波长,2S 距P 点421个波长.两波在P 点引起的两个振动的相位差的绝对值是 .26. 如T4-2-26图所示,1S 和2S 为同相位的两相干波源,相距为L ,P 点距1S 为r ;波源1S 在P 点引起的振动振幅为1A ,波源2S 在P 点引起的振动振幅为2A ,两波波长都是λ,则P 点的振幅A = .27. 21S S 、为振动频率、振动方向均相同的两个点波源,振动方向垂直纸面,两者相距λ23为波长)(λ如图.已知1S 的初相位为π21. (1) 若使射线C S 2上各点由两列波引起的振动均干涉相消,则2S 的初位相应为:_______________________.(2) 若使21S S 连线的中垂线M N 上各点由两列波引起的振动均干涉相消,则2S 的初位相应为:________________________________________.12T4-2-26图•••MN1S 2S CT4-2-27图x12T4-2-22图三、计算题1. 如T 4-3-1图所示,将一个盘子挂在劲度系数为k 的弹簧下端,有一个质量为m 的物体从离盘高为h 处自由下落至盘中后不再跳离盘子,由此盘子和物体一起开始运动(设盘子与弹簧的质量可忽略,如图取平衡位置为坐标原点,选物体落到盘中的瞬间为计时零点).求盘子和物体一起运动运动时的运动方程.2. 一质量为10g 的物体在x 方向作简谐振动,振幅为24cm ,周期为4s .当t =0时该物体位于x = 24cm 处.求:(1) 当t =0.5s 时物体的位置及作用在物体上力的大小.(2) 物体从初位置到x =-12cm 处所需的最短时间,此时物体的速度.3. 作简谐振动的小球,速度的最大值为-1m ax s cm 3⋅=v ,振幅为2cm =A .若令速度具有正最大值的某时刻为计时器点,求该小球运动的运动方程和最大加速度.4如T4-3-4图所示,定滑轮半径为R ,转动惯量为J ,轻弹簧劲度系数为k ,物体质量为m ,将物体从平衡位置拉下一极小距离后放手,不计一切摩擦和空气阻力,试证明该系统将作谐振动并求其振动周期.5. 如T 4-3-5图所示,有一水平弹簧振子,弹簧的劲度系数k =241-m N ⋅,重物的质量m =6kg .最初重物静止在平衡位置上,一水平恒力F =10N 向左作用于物体,(不计摩擦),使之由水平位置向左运动了0.05m ,此时撤去力F .当重物运动到左方最远位置时开始计时,求该弹簧振子的运动方程.6. 已知某质点振动的初始位置为20Ax =,初始速度00>v (或说质点正向x 正向运动),求质点的振动初相位.7. 如T4-3-7图所示,一半径为R 的匀质圆盘绕边缘上一点作微角摆动, 如果其周期与同样质量单摆的周期相同, 求单摆的摆线长度.8. 某人欲了解一精密摆钟的摆长, 他将摆锤上移了1 mm, 测出此钟每分钟快0.1s .这钟的摆长是多少?T 4-3-5图T 4-3-1图T 4-3-7图T 4-3-4图9. 已知一简谐振子的振动曲线如T3-4-9图所示,求其运动方程.10. 如T4-3-10图所示,一劲度系数为k 的轻弹簧,一端固定在墙上,另一端连结一质量为m 1的物体,放在光滑的水平面上.将一质量为m 2的物体跨过一质量为M ,半径为R 的定滑轮与m 相连,求此系统的振动圆频率.11. 一个质量为m 的小球在一个光滑的半径为R 的球形碗底作微小振动,如T4-3-11图所示.设0=t 时,0=θ,小球的速度为0v ,向右运动.试求在振幅很小情况下,小球的振动方程.12. 如T4-3-12图所示,一质点作简谐振动,在一个周期内相继通过距离为12cm 的两点A 、B ,历时2s ,并且在A 、B 两点处具有相同的速度;再经过2s 后,质点又从另一方向通过B 点.试求质点运动的周期和振幅.13. 如T4-3-13图所示,在一轻质刚性杆AB 的两端,各附有一质量相同的小球,可绕通过AB 上并且垂直于杆长的水平轴O 作振幅很小的振动.设OA = a , OB = b , 且b > a ,试求振动周期.14. 有两个振动方向相同的简谐振动,其振动方程分别为(cm)2ππ2cos 3(cm)π)π2cos(421⎪⎭⎫⎝⎛+=+=t x t x (1) 求它们的合振动方程;(2) 另有一同方向的简谐振动cm )π2cos(233ϕ+=t x ,问当3ϕ为何值时,31x x +的振幅为最大值?当3ϕ为何值时,31x x +的振幅为最小值?T4-3-9 T4-3-10图RT4-3-11图OθT4-3-12图AT4-3-13图OθBba15. 一质量为M 的全息台放置在横截面均匀的密封气柱上(见T4-3-15题图).平衡时气柱高度为h .今地基作上、下振动,规律为t A x G ωcos =,其中A 为振幅,ω为振动圆频率.忽略大气压强和阻尼,试求全息台振动的振幅.16. 假设地球的密度是均匀的,如果能沿着地球直径挖通一穿过地球的隧道,试证明落入隧道的一个质点的运动是简谐运动,并求出其振动周期.17. 已知波线上两点A 、B 相距1m, B 点的振动比A 点的振动滞后121s, 相位落后30, 求此波的波速.18. 一简谐波,振动周期21=T s ,波长λ =10m ,振幅A = 0.1m. 当t = 0时刻,波源振动的位移恰好为正方向的最大值.若坐标原点和波源重合,且波沿Ox 轴正方向传播,求:(1) 此波的表达式;(2) 4/1T t =时刻,4/1λ=x 处质点的位移;(3) 2/2T t =时刻,4/1λ=x 处质点振动速度.19. 一列平面简谐波在介质中以波速u = 5m ⋅s -1沿x 轴正向传播,原点O 处质元的振动曲线如图所示.(1) 画出x =25m 处质元的振动曲线. (2) 画出t =3s 时的波形曲线.20. 如T4-3-20图所示为一平面简谐波在t =0时刻的波形图,设此简谐波的频率为250Hz ,且此时质点P 的运动方向向下,求(1) 该波的波动方程.(2) 在距原点O 为100m 处质点的振动方程与振动速度表达式.21. 已知一平面简谐波的方程为 (SI))24(πcos x t A y +=(1) 求该波的波长λ,频率ν和波速度u 的值;(2) 写出t = 4.2s 时刻各波峰位置的坐标表达式,并求出此时离坐标原点最近的那个波峰的位置;(3) 求t = 4.2s 时离坐标原点最近的那个波峰通过坐标原点的时刻t .T4-3-19图20()cm y 42)s (t m1002/2A ()m y O A-P()m xT4-3-20图T4-3-15图h。
第4章《振动》选择题解答与分析
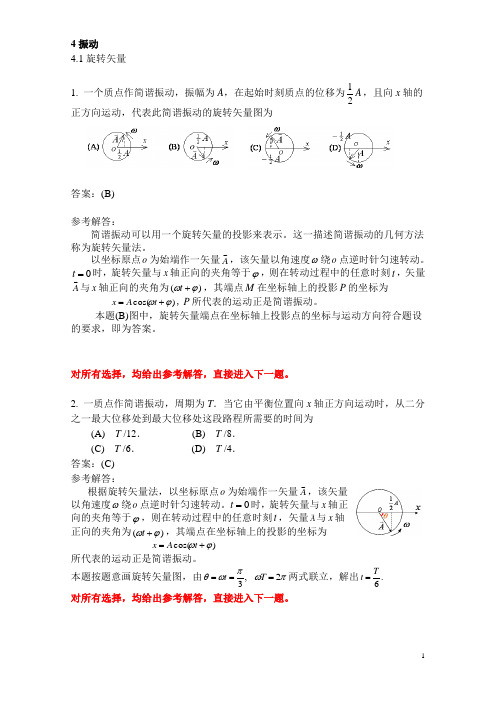
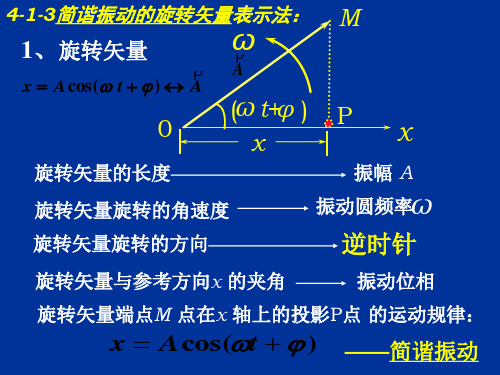
4振动4.1旋转矢量1. 一个质点作简谐振动,振幅为A ,在起始时刻质点的位移为A 21,且向x 轴的正方向运动,代表此简谐振动的旋转矢量图为答案:(B)参考解答:简谐振动可以用一个旋转矢量的投影来表示。
这一描述简谐振动的几何方法称为旋转矢量法。
以坐标原点o 为始端作一矢量A,该矢量以角速度ω绕o 点逆时针匀速转动。
0=t 时,旋转矢量与x 轴正向的夹角等于ϕ,则在转动过程中的任意时刻t ,矢量A与x 轴正向的夹角为)(ϕω+t ,其端点M 在坐标轴上的投影P 的坐标为)cos(ϕω+=t A x ,P 所代表的运动正是简谐振动。
本题(B)图中,旋转矢量端点在坐标轴上投影点的坐标与运动方向符合题设的要求,即为答案。
对所有选择,均给出参考解答,直接进入下一题。
2. 一质点作简谐振动,周期为T .当它由平衡位置向x 轴正方向运动时,从二分之一最大位移处到最大位移处这段路程所需要的时间为 (A) T /12. (B) T /8. (C) T /6. (D) T /4. 答案:(C) 参考解答:根据旋转矢量法,以坐标原点o 为始端作一矢量A,该矢量以角速度ω绕o 点逆时针匀速转动。
0=t 时,旋转矢量与x 轴正向的夹角等于ϕ,则在转动过程中的任意时刻t ,矢量A与x 轴正向的夹角为)(ϕω+t ,其端点在坐标轴上的投影的坐标为)cos(ϕω+=t A x 所代表的运动正是简谐振动。
本题按题意画旋转矢量图,由,3πωθ==t πω2=T 两式联立,解出.6Tt =对所有选择,均给出参考解答,直接进入下一题。
4.2振动曲线、初相1. 一质点作简谐振动.其运动速度与时间的曲线如图所示.若质点的振动规律用余弦函数描述,则其初相应为(A) π/6. (B) 5π/6. (C) -5π/6.(D) -π/6. (E) -2π/3.答案:(C)参考解答:令简谐振动的表达式:)cos(ϕω+=t A x ,)(ϕω+t 称为振动系统在t 时刻的位相。
第4章 多自由度系统的振动题解

习 题4-1 在题3-10中,设m 1=m 2=m ,l 1=l 2=l ,k 1=k 2=0,求系统的固有频率和主振型。
解:由题3-10的结果22121111)(l g m l gm m k k +++=,2221l g m k -=,2212l g m k -=,22222l g m k k +=代入m m m ==21,021==k k ,l l l ==21 可求出刚度矩阵K 和质量矩阵M⎥⎦⎤⎢⎣⎡=m m M 00;⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=l mg l mg l mg l mg K 3 由频02=-M p K ,得0322=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=mp l mg l mg lmgmp l mgB 0242222242=+-∴lg m p lg m p mlg p )22(1-=∴ ,lg p )22(2+=为求系统主振型,先求出adjB 的第一列 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=l mg mpl mgadjB 2分别将频率值21p p 和代入,得系统的主振型矩阵为⎥⎦⎤⎢⎣⎡-=112)1(A⎥⎦⎤⎢⎣⎡+=112)2(A题4-1图4-2 题4-2图所示的均匀刚性杆质量为m 1,求系统的频率方程。
解:设杆的转角θ和物块位移x 为广义坐标。
利用刚度影响系数法求刚度矩阵k 。
设0,1==x θ,画出受力图,并施加物体力偶与力2111,k k ,由平衡条件得到,222111ak b k k +=, a k k 221-=设1,0==x θ,画出受力图,并施加物体力偶与力2212,k k ,由平衡条件得到,12k a k 2-=, a k k 222= 得作用力方程为⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡--++⎭⎬⎫⎩⎨⎧⎥⎥⎦⎤⎢⎢⎣⎡0000312222221221x a k a k a k a k b k x m a m θθ由频率方程02=-M K p ,得031222222212221=----+pm a k ak a k pa m a kb k4-3 题4-3图所示的系统中,两根长度为l 的均匀刚性杆的质量为m 1及m 2,求系统的刚度矩阵和柔度矩阵,并求出当m 1=m 2=m 和k 1=k 2=k 时系统的固有频率。
振动理论讲义第4章 单自由度系统受迫振动
图 4.1 电磁式振动台
当励磁线圈通以直流电流时,导磁体就形成恒定磁场。当在这种磁场中的振动线圈
有交流电通过时,便受到交变电磁力的作用,使支承在平板弹簧上的导杆以及与导杆联
在一起的台面等在磁场中振动。
由于振荡器供给的交流电是正弦波,产生的电磁力也是简谐力,可用
表示。其频率 和幅值 都可以调节,从而使台面能以不同的频率和振幅作上下振动。
将振动线圈、导杆、台面等简化为集中质量 ,平板弹簧为具有刚度 的弹性元件,
并考虑各部分的阻尼作用,用 表示相应的阻尼系数,振动台可以简化成图 4.1b 所示的
单自由度有阻尼的质量弹簧体系,受
的简谐激励。
4.2 无阻尼受迫振动
进一步分析(4.5)式表示的含义。显然, 是一个具有振幅为
的正弦
波,该振幅取决于频率比 。
图 4.2 常幅 变 频力作用于质量 上的系统绝对运动 共振图
当
时,纵坐标(即振幅)是负值,如何理解负振幅的意义?考虑到
上式表明,“负振幅”相当于与原波相位差为 180 度。在物理上,它表示,当
,
力和运动同相,质量在平衡位置下面而力又向下推质量;而当
以表示为
⁄
假定 和 比较接近,例如
/
,则
⁄
/
⁄
/
在 很小的情况下,括号中的第二项可以忽略,因此
⁄
/
/
这是拍的方程。当激振频率和固有频率相等,即
/
,有
即为振幅随时间发散的振动方程。当然,在共振情况下的振幅发展到无穷大是需要一定 时间的。
4-4
4.3 外力的振幅取决于频率的情况
前面讨论的问题中,外力的振幅 是独立于其频率 的。工程中常见的还有振幅 取
第4章 振动系统的运动微分方程

[
]
两边对时间求导数
3 &x & & mx&& = mgx − 2k (2 x + λ s ) x 2
注意到在静平衡位置满足 所以微分方程为
mg = 2kλ s
3 m&& + 4kx = 0 x 2
返回首页
Theory of Vibration with Applications
4.1 牛顿定律和普遍定理
返回首页
4.2 拉格朗日(Lagrange)运动方程 拉格朗日(Lagrange)
4.2.4 完整的保守系统的拉格朗日运动方程
例4-5 图示系统,摆的支点在水平方向受到弹性约束,其总 刚度为k,摆的质量为m,摆长为l。试用拉格朗日方程求出系 统的运动方程。 解: (1)选择x及θ 为广义坐标。 (2)动能及势能
4.1.4 普遍定理的综合应用
在有限路程中主动力的功为
∑ Wx0 − x = −mg ( x0 − x) +
1 2 k (2 x0 + λ s ) − (2 x + λ s ) 2 2
[
]
由动能定理的积分形式
T − T0 = ∑Wx0 − x
1 3 2 1 2 2 & ⋅ mx − T0 = − mg ( x 0 − x ) + k (2 x 0 + λ s ) − (2 x + λ s ) 2 2 2
∑ (F
n i =1
Theory of Vibration with Applications
x i δ xi
+ F y i δ y i + Fz i δ z i = 0
《机械振动》张义民—第4章第1、2节ppt
◆当振动系统需要两个独立坐标描述其运动时, 那么这个系统就是两个自由度系统。
◆两自由度系统是最简单的多自由度系统。 ◆两自由度系统的振动微分方程一般由两个联立 的微分方程组成。 ◆两自由度系统有两个固有频率及固有振型。
◆在任意初始条件下的自由振动一般由这两个固 有振型叠加,只有在特殊的初始条件下系统才按某 一个固有频率作固有振动。
大象体积庞大,走起路来 更是别具一格,四只脚移动 时分别各自相差90度的位移 差。没有一只脚做的是相同 位移的移动。
◆四只脚动物可以看作是“四个振动体耦合在一起的 系统”吗?事实上,四个振动体组成的系统的基本运动 模式,确实与所提到的那四种走路方式一模一样。
◆可是动物们为什么会按照耦合振动体的方式来行走 呢?虽说现在关于这个问题还没有定论。生物学家们认 为,掌管运动的脑神经网(由数突连接起来的神经细胞) 看起来更接近“耦合振动体”一些。有推测认为,正是 脑神经网的动力学特性,使得动物走起路来才会表现出 振动体的特点。
1998年匈牙利的物理学家塔 马斯·维塞克在布达佩斯音乐学 院举行的一场音乐会上意外地发 现了同步化的现象。
演出相当成功,落幕后观众们热烈的掌声长达 3分钟之久,而维塞克博士便在这里发现了有趣 的东西。音乐会刚一结束,观众们雷鸣暴雨般的 掌声响起,然而过了一段时间之后,观众们的热 烈的掌声显然同步化了,变成了同一种节奏的拍 手。为了答谢观众们的热情,演奏者重新走上台 来谢幕,这时的掌声又突然之间失去了刚才的节 奏,雨点般疯狂地响起。在最后长达3分钟的鼓 掌声中,狂热的掌声和同步的掌声依次交替出现。
◆强迫简谐振动发生在激励频率,而这两个坐标 的振幅将在这两个固有频率下趋向最大值。共振时 的振型就是与固有频率相应的固有振型。
随机振动--第4章-随机过程

• 从工程试验的角度来说,随机过程是指: 对某一物理量变化的全过程进行一次试验观测得到 的结果是一个时间t的函数,但对该物理量的变化过程独 立的重复进行多次试验测试所的结果是不相同的.
• 例如:
O
A
B
x
一辆汽车在某一段公路上行驶,由于随机因素(如路 面不平)影响,驾驶员座位处的垂直加速度每时每刻都在 变化,并在某一平均值附近上下波动. 同一台车,同一个驾驶员,同一车速,同一段路 多次测试,每次测试的结果不能重复,各不相同
2
2 Xk
1 T 2 lim [ xk (t ) Xk ] dt 0 T T
4.3 随机过程的数字特征
3、自相关函数 数学期望和方差是刻划随机过程 X(t) 在各个孤立时刻的统计特性的重要特征, 但不能描述随机过程两个不同时刻的状态 之间的联系。引入自相关函数。
集合平均---t1,t2截口 X(t1),X(t2)
按照随机过程的定义,这样 的过程是一个随机过程
任意1条试验曲线 ----样本函数、 子样函数 也叫做一个过程的 现实 所有可能的“现实”构成 1个随机过程的--样本空间(样本集合)
几个基本概念
xi(t1) 截口(状态) xi(tj) j=1,2,…. 一个样本由一系列随机变 量xi(tj) j=1,2,….构成 一个随机过程由无限多个 随机变量构成的 随机变量系
p, t1 0
P , t1 1 ,极大值
对于平稳过程来说,其概率分布函数和概率密度 函数也不依赖于采样时刻。
P x, t P x ,
p x, t p x
(2)多个随机变量的联合概率分布
设:采样时刻t1与t2的两个随机变量
第四章振动下
结论: 结论:
振子在振动过程中, (1) 振子在振动过程中,动能和势能分别随时间 变化,但任一时刻总机械能保持不变。 变化,但任一时刻总机械能保持不变。 (2) 动能和势能的变化频率是弹簧振子振动频 率的两倍。 频率一定时, (3)频率一定时,谐振动的总能量与振幅的平方 成正比。(适合于任何谐振系统) 。(适合于任何谐振系统 成正比。(适合于任何谐振系统) 弹性势能
小结:
描述简谐振动的三种方法: 描述简谐振动的三种方法: 运动方程,振动曲线,旋转矢量。 运动方程,振动曲线,旋转矢量。
的简谐振动, 例1:一物体沿 轴作振 幅为 A 的简谐振动,若初始时该球的 :一物体沿x轴作振 状态为( ) ;(2)在平衡位置且向X轴正方向运动 轴正方向运动; 状态为(1)X0= -A;( )在平衡位置且向 轴正方向运动; ;( 处向X轴负方向运动;(4) 轴负方向运动;( (3)在 X0=1/2 A 处向 轴负方向运动;( )在 ) / 方向运动。试用旋转矢量法确定相应的初相位。 处向正 方向运动。试用旋转矢量法确定相应的初相位。 3π r ϕ = ϕ =π
k = m
得
X
g b
mg
b, v 0 = 0
g t+π) b
A =b, φ = π
[ 例2] 一谐振动的振动曲线如图所示。 一谐振动的振动曲线如图所示。
ω 以及振动方程。 求: ϕ 0 以及振动方程。
−
π
x
x
A 2
3r
A
1.0
0
解:
t
r A
A
π
2
x
π
3
t=
A x0 = = A cos ϕ 0 2 0时 v 0 = − ω A sin ϕ 0 > 0
普通物理A(1) 课程指导 第4章《振动》
N
2
cost
N 1
2
2
14
7. 分别敲击某待测音叉和标准音叉,使它们同时发音,听到时强时弱 的拍音.若测得在20 s内拍的次数为180次,标准音叉的频率为300 Hz, 则待测音叉的频率为______________.
拍频: 单位时间内强弱变化的次数 2 1 ( 2 1)
设1 300 Hz 则有: 2 1 9,或者1 2 9 2 309 Hz,或者 2 291Hz
0.08
O
-0.04
1
x1 t (s)
2 x2
x1
0.08 c os (t
2
),
x2
0.04 c os (t
) 2
A2
0
x
A
A1
10
6. N个同方向、同频率的简谐振动,它们的振幅相等,初相分别为0, , 2, ..., 依次差一个恒量 ,求合振动的振幅。
x1 Acost x2 Acos(t ) x3 Acos(t 2)
4
1. 一质点作简谐振动,周期为T.当它由平衡位置向x轴正方向运 动时,从二分之一最大位移处到最大位移处这段路程所需要的时 间为
(A) T /12. (B) T /8. (C) T /6. (D) T /4.
旋转矢量法
[C ]
首先画出二分之一最大位移处旋转矢量图,
然后,再画最大位移处旋转矢量图。
设所求的时间为t,则有
(1) 质点的振动方程; (2) 质点在A点处的速率.
AB
x
解: 3
4
4
t = 0时, x 5cm Acos
A 5 5 2 cm
cos(3 / 4)
∴ 振动方程
x 5 2 102 cos(t 3) (SI) 44
大物习题答案第4章 机械振动

第4章 机械振动基本要求1.掌握描述简谐振动的振幅、周期、频率、相位和初相位的物理意义及之间的相互关系2.掌握描述简谐振动的解析法、旋转矢量法和图线表示法,并会用于简谐振动规律的讨论和分析3.掌握简谐振动的基本特征,能建立一维简谐振动的微分方程,能根据给定的初始条件写出一维简谐振动的运动方程,并理解其物理意义4.理解同方向、同频率简谐振动的合成规律,了解拍和相互垂直简谐振动合成的特点基本概念1.简谐振动 离开平衡位置的位移按余弦函数(或正弦函数)规律随时间变化的运动称为简谐振动。
简谐振动的运动方程 cos()x A t ωϕ=+2.振幅A 作简谐振动的物体的最大位置坐标的绝对值。
3.周期T 作简谐振动的物体完成一次全振动所需的时间。
4.频率ν 单位时间内完成的振动次数,周期与频率互为倒数,即1T ν=5.圆频率ω 作简谐振动的物体在2π秒内完成振动的次数,它与频率的关系为22Tπωπν== 6.相位和初相位 简谐振动的运动方程中t ωϕ+项称为相位,它决定着作简谐振动的物体状态;t=0时的相位称为初相位ϕ7.简谐振动的能量 作简谐振动的系统具有动能和势能。
弹性势能222p 11cos ()22E kx kA t ωϕ==+ 动能[]22222k 111sin()sin ()222E m m A t m A t ωωϕωωϕ==-+=+v弹簧振子系统的机械能为222k p 1122E E E m A kA ω=+== 8.阻尼振动 振动系统因受阻尼力作用,振幅不断减小。
9.受迫振动 系统在周期性外力作用下的振动。
周期性外力称为驱动力。
10.共振 驱动力的角频率为某一值时,受迫振动的振幅达到极大值的现象。
基本规律1.一个孤立的简谐振动系统的能量是守恒的物体做简谐振动时,其动能和势能都随时间做周期性变化,位移最大时,势能达到最大值,动能为零;物体通过平衡位置时,势能为零,动能达到最大值,但其总机械能却保持不变,且机械能与振幅的平方成正比。
机械系统动力学第四章 固有频率的实用计算方法

瑞利法从单自由度振动系统固有频率计算的能量方法出 发,对于多自由度振动系统,在作无阻尼自由振动时,
Tmax Umax 响应为同步振动。系统的动能可表示为:
T 1 X&T MX& 2
系统的势能
U 1 X T KX 2
设 X {ui}sin nit
带入得最大动能
Tmax
2 ni 2
2k 2m k
=0
k k 22m
即: (2k 2m)(k 22m) k 2=0
可得固有频率
12
=0.2192
k m
22
=2.2808
k m
第4章 固有频率的实用计算方法
4-2 多自由度系统 4-2-2计算固有频率的近似法 一、瑞利法(Rayleigh法)
{ui }T
M {ui}
最大势能
U max
1 2
{ui
}T
K{ui }
第4章 固有频率的实用计算方法
4-2 多自由度系统 4-2-2计算固有频率的近似法 一、瑞利法(Rayleigh法)
带入公式 Tmax Umax 得:
2 ni
{ui}T K{ui} {ui}T M{ui}
4-2-7
利用4-2-7精确计算多自由度振动系统的固有频率,前
K{u2} M {u2}
=
{1
1} k
1}
m 0
k
1
0 1 2m 1
5k 3m
1.667
k m
与精确解相比,一阶固有频率的相对计算误差 1.35%
二阶固有频率的相对计算误差 -26.92%
第四章-机械振动
x(m)
t
A
曲线2曲线1
-A
t
t
t2
t1
1
2
当:t t2 t1 0, 2 1 0
振动2比振动1超前
t(s)
§4.1 简谐振动
例1.如图的谐振动x-t 曲线,试求其谐振方程
解:由图知
x(m)
A 2m T 2s 2
可得: 2 T O
振动表达式为
1
2t (s)
x Acos( t )
dt 2 l
谐振方程为:
设 2 2T
ml
x Acos(t )
§4.2 简谐振动的实例分析
(5)U形管中液体无粘滞振荡
x x
l
为管内液体密度,
l为液体在管内的长度。
动力学方程为:
l
d2 dt
x
2
2gx
0
谐振方程为:
2 2g
l
x Acos(t )
§4.2 简谐振动的实例分析
(6)LC谐振电路
P sin m dv
dt
v l
P
sin 1 3 (小角度时)
6
g 0
l
令 2 g
l
2 0
结论: 小角度摆动时,单摆的运动是谐振动.
周期和角频率为:T 2 l
g
g
l
§4.2 简谐振动的实例分析
(2) 复摆(物理摆)
以物体为研究对象
设 角沿逆时针方向为正
mghsin JZ
10
即: Asin( ) 0 sin( ) 0
6
2
x
1
cos(
t 2 )(m)
10 6 3
§4.1 简谐振动
谐振动

( Oscillation and Wave)
第四章 振动Oscillation
前言: 振动和波是物理中的重要领域
机械振动 — 物体在一定位置附近作来回往复的运动。
振动有各种不同的形式:机械振动、电磁振动、
广义振动: 任一物理量(如位移、电流等)在某一数值附近
反复变化。
简谐运动(直线、周期)最简单、最基本 的振动.
d x I d x mv 2 2 v 2 kxv 0 dt R dt 2 d x I ( 2 m ) kx 0 2 dt R 2 d x k 与上结果相同 ( )x 0 2 I dt m 2 R
注:从能量守恒导出简谐运动方程的思路, 对研究非机械运动十分重要,因为此 时已不宜用受力分析的方法了!
§4.2 谐振动的能量
一.动能
二.势能
1 1 2 2 2 Ek mv k A sin ( t ) 2 2 1 2 2 2 A m sin ( t ) 2 1 2 1 2 2 E p kx k A cos ( t ) 2 2
三.总能量
1 2 1 2 2 E Ek E p kA m A 2 2
弹簧振子周期
三.描述谐振动的物理量
1.振幅:
A
k 2.角频率: m 3.频率: 2 2 4.周期: T
注意
T 2π m k
单摆周期
T 2π l g
§4.1 简谐振动
x A cos( t )
四.谐振动中的速度和加速度
dx v A sin(t ) dt
T2 T2 和 代入式⑵得
d x I d x ( mg m 2 mg kx ) R 2 dt R dt 2 2 d x I ( 2 m ) kx d x ( k ) x 0 2 2 dt R I dt m 2 R
第4章习题解答讲解
第4章 习题与答案4-1作简谐振动的物体,每次通过同一位置时,不一定相同的量是 [ ] (A) 位移 ; (B) 速度 ; (C) 加速度; (D) 能量。
[答案:B ]4-2 把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度θ ,然后由静止放手任其振动,从放手时开始计时。
若用余弦函数表示其运动方程,则该单摆振动的初相为 [ ](A) π; (B) π/2; (C) 0; (D) θ [答案:C ]4-3 谐振动的振动曲线如题4-3图所示,则有[ ] (A )A 超前π/2; (B )A 落后π/2; (C )A 超前π; (D )A 落后π。
[答案:A ]4-4 一个质点作简谐振动,振辐为A ,在起始时刻质点的位移为A /2,且向x 轴的正方向运动,代表此简谐振动的旋转矢量图为题4-4图 中哪一个? [ ][答案:B ]4-5 两个质点各自作简谐振动,它们的振幅相同、周期相同。
第一个质点的振动方程为x 1 = A cos(ωt + α)。
当第一个质点从相对于其平衡位置的正位移处回到平衡位置时,第二个质点恰在最大负位移处。
则第二个质点的振动方程为 [ ] (A) )π21cos(2++=αωt A x ; (B) )π21cos(2-+=αωt A x ; (C) )π23cos(2-+=αωt A x ; (D) )cos(2π++=αωt A x 。
[答案:A ]4-6 已知某简谐振动的振动曲线如题4-6图所示。
则此简谐振动的振动方程(SI )为 [ ](A) 题4-4图题4-3图(A )220.02cos()33x t =π+π;(B )220.02cos()33x t =π-π;(C )420.02cos()33x t =π+π;(D )420.02cos()33x t =π-π。
[答案:C ]4-7 弹簧振子作简谐振动,先后以相同的速度依次通过A 、B 两点,历时1秒,质点通过B 点后再经过1秒又第二次通过B 点,在这2秒内质点通过的总路程为12cm ,则质点的振动周期和振幅分别为 [ ](A )3s 、12cm ; (B )4s 、6cm ; (C )4s 、9cm ; (D )2s 、8cm 。
大学物理4-1 简谐振动的动力学特征

a x
积分常数,根据初始条件确定
x A cos(t )
T 2π
A A
x
x t 图
T
取 0
o
t
t
v A sin(t )
A
v
v t 图
T
π A cos( t ) 2
a A 2 cos(t )
0
an
π t 0 2
A
vm A
v a
an A
2
x
x A cos(t 0 )
π v A cos( t 0 ) 2
a A cos(t 0 )
2
第4章 机械振动
第4章 机械振动
用旋转矢量图画简谐运动的
x
A
0
P
2
三 简谐振动的旋转矢量表示法
2π T
当
t t+ 0时 0
0
A
t=t
A
x0
以 o为 原点旋转矢
量 A的端点
在
o
x
x 轴上的
投影点的运 动为简谐运 动.
x0 A cos 0
第4章 机械振动
x A cos( t t t
即
2
① ② ③ ④ ⑤ J d x (m 2 ) 2 kx 0 R dt
2
d x k x0 2 2 dt m I / R
所以,此振动系统的运动是谐振动.
第4章 机械振动
(2) 振动系统的圆频率
k m J / R2
T 2 2 m J / R2 k
大学物理教程课件讲义周期震动
图4.16
4.6 受迫振动 共振
阻尼振动中的振幅在减小,要维持有阻尼的振动系 统等幅振动,必须给振动系统不断地补充能量。如果对 振动系统施加一个周期性的外力,其所发生的振动称为 受迫振动。这个周期性外力称为策动力。许多实际的振 动属于受迫振动,如声波引起耳膜的振动、机器运转时 引起基座的振动等。
如果两个简谐振动的振动方向相同而频率不同,那 么它们的合振动虽然仍与原来的振动方向相同,但不再 是简谐振动。下面先用解析法对其合成进行定量讨论。
为了使问题简化,假设两个简谐振动的振幅都为A, 初相都为φ
x1=Acos (2πν1t+φ) x2=Acos (2πν2t+φ)
4.4 简谐振动的合成
上式不符合简谐振动的定义,所以合振动不再是简谐振动。这样振幅就 随时间变化,且具有周期性,表现出振动忽强忽弱的现象,如图4.14所示。
例4.4 一简谐振动的振 动曲线如图4.8(a)所示。求角 频率ω、初相φ及简谐振动的 运动方程。由振动曲线可以看 出,t=0时,x0=0,v0>0,与此 状态相对应的旋转矢量如图 4.8 (b) 所示。
图4.8 例4.4图
4.3 旋转矢量法
依据初始条件由旋转 矢量法来确定初相φ.如图 4.9所示,满足x0=0.06 m条 件,有P和Q两个点,但是 只有P点在x轴的投影沿x正 向运动。
4.5 阻尼振动
前几节讨论的简谐振动都是在不计能量损耗条件下的理想 情况。实际上,弹簧振子、单摆、复摆这类机械振动系统在振 动过程中不可避免地要受到空气阻力等摩擦阻力作用。而在LC 电路这类电磁振荡系统中,线圈和导线不可能完全没有电阻。 所以,在振动过程中,机械能或电磁能总要逐渐转化为热量耗 散掉。这样的能量损耗作用称为摩擦阻尼或电磁阻尼。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 π cos 2 3
x
v0 A sin 0
sin 0
振动方程:
π 3
π x 0.12 cos( π t ) 3
dx π 1 v t 0.5 0.12π sin( π t ) t 0.5 0.189 m s dt t 0.5 3
• 旋转矢量A的角速度: 角频率 • 旋转矢量A与 x 轴的 夹角( t+ ): 相位 • t = 0 时, A与x 轴 的夹角 :初相位。 • 旋转矢量A旋转一周, M点完成一次全振动。
y
P
A
t 0
M
x
周期:
T
2π
例1 一质点沿x 轴作简谐振动,振幅为12 cm,周期为 2s。当t = 0时, 位移为6 cm,且向x 轴正方向运动。 求:(1)振动方程;(2)t = 0.5 s时,质点的位置、速度和加 速度;(3)如果在某时刻质点位于x = -6 cm,且向 x 轴负 方向运动,从该位置回到平衡位置所需要的时间。
x A cos ( t ) 2π 1 已知:A =12 cm , T = 2 s , πs T x 0.12 cost
解: 设简谐振动表达式为 初始条件: t = 0 时, x0 = 0.06 m , v0 > 0
0.06 =0.12 cos
y
:振动的“初相位 ”。
dx π v A sin( t ) vm cos( t ) dt 2
vm A
称为速度幅。 速度相位比位移相位超前/2。
dv 2 a A cos( t ) am cos( t π ) dt
弹簧振子: 一根轻弹簧和一个刚体构成的一个 振动系统。
F
O 根据胡克定律: x x (k为劲度系数)
F kx
(1) 在弹性限度内,弹性力F和位移x 成正比。
(2) 弹性力F和位移x 恒反向,始终指向平衡位置。 恢复力: 始终指向平衡位置的作用力
由牛顿第一定律:
得:
d x F m 2 k x dt 2 d x k x 2 dt m
dv π 2 2 a t 0.5 0.12π cos( π t ) t 0.5 0.103 m s dt t 0.5 3
设在某一时刻 t1, x = - 0.06 m 代入振动方程:
0.06 0.12 cos (π t1 π 3 )
1 cos ( π t1 π 3 ) 2
π 2π π t1 3 3
4π 或 3
y
2π 3
π 2π π t1 3 3
t1 1s
4π 3
x
π 3π π t2 3 2
11 t2 s 6
11 5 t t 2 t1 1 s 6 6
例2 两质点做同方向、同频率的简谐振动,振幅相 等。当质点1在 x1= A/2 处,且向左运动时,另一个质 点2在 x 2= -A/2 处,且向右运动。求这两个质点的相 位差。 解: -A
-A/2
2π 2π T
频率 :单位时间内完成全振动的次数。 周期 T:完成一次全振动所经历的时间。
弹簧振子的频率:
弹簧振子的周期:
1 k 2π mm 来自 2π k 2π结论:弹簧振子的振动频率和周期仅与振子本身的性 质(k 和 m)有关,而与其他因素无关。
由振动系统本身的固有属性所决定的频率和周 期称为固有频率和固有周期。 ( t + ) :振动的“相位 ”。
设 t = 0时,振动位移:x = x0
振动速度:v = v0
x A cos ( t )
v A sin ( t )
x0 A cos
v0 A sin
x0 A cos
x
2 0
2 2
v0
A sin
2 2
v
2 0 2
A (sin cos ) A
简谐运动的加速度:
dv a 2 A cos( t ) am cos( t π ) dt
A A
2
O
x, v, a
x
a
v
O
T
A
t
4-1-2 描述简谐运动的物理量
x A cost
A :振幅 (最大位移,x =±A )
:角频率 (圆频率)
A x0
2
v0
2
vo tan xo
4-1-3 简谐运动的旋转矢量表示法
旋转矢量A在 x 轴上 的投影点 M 的运动规律: y
P
x A cos( t )
结论:
A
t 0
0
M
x
投影点M的运动 为简谐振动。
• 旋转矢量的模A:振幅
am A 称为加速度幅。
2
加速度与位移反相位。
比较:
a A cost
2
x A cost
a x
2
即
d x 2 x 2 dt
2
结论:做简谐运动的质点,其加速度与位移恒成正比, 而方向相反。
解题方法
由初始条件求解振幅和初相位:
2
令
k m
d x 2 x 2 dt
2
简谐运动表达式:
x A cost
简谐运动:
物体的运动遵从余弦(或正弦)规律。 简谐运动的三项基本特征:
x A cost
F kx 2 d x 2 x 2 dt
简谐运动的速度:
dx π v A sin( t ) vm cos( t ) dt 2
第四章
振动与波动
机械振动: 物体在一定的位置附近做来回往复的运动。 振动:任何一个物理量在某个确定的数值附近作 周期性的变化。 波动:振动状态在空间的传播。 任何复杂的振动都可 以看做是由若干个简 单而又基本的振动的 合成。这种简单而又 基本的振动形式称为 简谐运动。
§4-1 简谐运动
4-1-1 简谐运动的基本特征