第五章视景仿真关键技术研究_35_53
碰撞检测技术在空间飞行器视景仿真中的应用
第2 卷 第5 3 期
文章 编号 :0 6— 38 2 O ) 5- 0 0-0 10 9 4 (O 6 0 0 3 3
计
算
机
仿
真
26 月 O 年5 O
碰 撞 检 测 技 术 在 空 间 飞行 器 视 景 仿 真 中的 应 用
顾 明 , 新 杨
s a e rf ̄v s a i l ain,s c s d a i g s tl t u sa r c p c c at iu smu t l o u h a r w n a el e s b tr ta k。a d s tl t  ̄ i gn r c s,a e s o n i n ae l e s ma i g p o e i s r h w . T e e oe t e a p ia in o o l in Dee t n i p c rf V s a i l ai n i p o e o b u c s f to . h rf r h p l t fC l s t i n S a e a t iu S mu t s r v t e a s c e s c o io c o c l o d ulme d h T i p p ri h s a e swo h o en f rd t yt ea p ia t f p c ca t s a i lai na d C l so n fb i g r e e o b h p l n s o S a e r f Viu S mu t n o i nDee t nT h e c l o i t i c o e ・ c
一
建 筑物 、 山坡地形 时的” 穿墙 而过 ” ” 土而入 ” 、穿 之类 现象 的 发生。碰撞 检测就是一种常见 的方法 。其 基本原理 是 : 果 如 两个完 全封闭的多面体发生相互碰撞 时 , 中一个 多面体 至 其 少会有一个面与另 一个 多 面体 的至少一 个 面相交 。若能 在 碰撞发生时 。 刻检测 到相交 , 立 然后将 两个 物 体的位 置稍作
物理学本科毕业论文题目

物理学本科毕业论文题目 20世纪是科学技术飞速发展的时代。
在这个时代,目睹了人类分裂原子、拼接基因、克隆动物、开通信息高速公路、纳米加工和探索太空。
很难设想,若没有科学技术的飞速发展,现代生活将是什么样子。
与科学技术的发展一样,物理学也经历了极其深刻的革命。
可以说,物理学每时每刻都在不停的发展,其活跃的前沿领域很多,是最有生命力、成果最多的学科之一。
下面学术堂为你提供了物理学本科毕业论文题目,希望对你有所帮助。
物理学本科毕业论文题目一: 1、MATLAB在大学物理实验仿真中的应用 2、基于Flash的大学物理电学仿真实验的设计与实现 3、量子点和一维量子线相耦合系统在Kondo区物理性质的研究 4、基于时域物理光学方法的半空间上方目标散射研究 5、有机光电材料的光物理特性研究 6、基于激光混沌的全光物理随机数发生器 7、基于超导电路系统的量子模拟和基础量子物理研究 8、金属亚波长结构阵列电磁场增强及光学异常透射的机理研究 9、微型热电系统的多物理场耦合模型与性能优化研究 10、外尔半金属的反常物理性质研究 11、中子光子输运物理过程蒙特卡罗处理方法研究 12、红外视景仿真关键技术研究 13、关于拓扑物理的量子模拟研究 14、高真实感红外场景实时仿真技术研究 15、氢化非晶硅薄膜结构及其物理效应 16、PIC数值方法以及激光-物质相互作用若干物理研究 17、目标电磁散射特性的快速计算方法研究 18、钙钛矿半导体中的瞬态物理过程研究 19、基于激光自混合效应的多物理参数同步测量方法研究 20、高性能多物理场数值算法研究及其应用 21、超薄Bi薄膜的电子态研究 22、铁电基复合薄膜的光伏效应及其调控研究 23、高增益短波长自由电子激光相关物理研究 24、基于条码质量的直接标刻激光参量与物理机制的研究 25、超标准模型和新物理现象的理论研究 26、PLD制备InGaZnO薄膜及其物理性质研究 27、高场磁体的多物理场耦合作用机理 28、电大目标的时域及频域散射场计算方法研究 29、超冷原子系统物理性质研究 30、表面增强拉曼散射结构化衬底制备及其高灵敏探测研究 31、含时薛定谔方程的高阶辛算法研究 32、激光器中的自调制及不稳定性研究 33、自由电子激光物理中统计物理分析方法的若干研究 34、金属-介质-金属结构中表面等离子特性研究及器件设计 35、新型宽带太赫兹源物理机制的研究 36、基于矢量声场的水下被动探测与定位技术研究 37、CPT原子钟物理系统的研究与探索 38、物理虚拟仿真实验系统的设计研究 39、科学推理能力和物理问题解决能力的对比研究 40、高温高压声场测试平台设计 物理学本科毕业论文题目二: 41、硅基SiO_2薄膜材料的制备与物理特性研究 42、电大尺寸目标的电磁特性分析方法研究 43、基于驻相法积分和NURBS曲面建模的物理光学法研究 44、FLASH游戏型物理课件的设计与开发研究 45、普通物理实验课程教学改革的探索与实践 46、钙钛矿型氧化物透明导电薄膜的制备与物理性质研究 47、光学薄膜在激光作用过程中的热吸收与热应力的研究 48、强关联材料LaTiO_3和NdTiO_3物理性质及应用研究 49、基于FLASH技术的大学物理仿真实验的研究 50、半导体物理发展史探讨 51、激光物理的创立及早期的发展 52、复杂目标的RCS计算 53、电子束蒸发制备ZnO:Al薄膜及光电性质研究与普通物理实验改革 54、设计性物理实验的设计与实施研究 55、偶氮染料掺杂聚乙烯醇薄膜的光致双折射实验设计与研究 56、激光打标的物理机制研究 57、基于交互式Flash技术的网络虚拟大学物理实验的探索与实践 58、PBAIP等离子体鞘层物理特性的应用研究 59、结构不良物理问题解决研究 60、基于虚拟仪器的主减速器噪声检测技术与系统 61、甲基橙掺杂聚乙烯醇薄膜简并四波混频特性的实验教学研究 62、物理师范生实习前后光学PCK的差异比较研究 63、面向再制造的超声清洗研究及应用 64、亚临界密度等离子体中激光加速离子物理机制的研究 65、Bi系氧化物薄膜分子束外延法制备及物理性能的研究 66、矩量法和物理光学法的混合算法及应用研究 67、高频算法在电磁散射计算中的应用 68、含有表面过渡层的铁电薄膜动态物理性质的理论研究 69、ZrO_2化学膜与物理膜损伤机理的对比研究 70、物理光学法在导体与涂层目标电磁散射中的应用 71、基于混沌激光产生物理真随机数的后续处理 72、面向高速随机数发生器的宽带物理熵源 73、Sr_2FeMoO_6复合体系的制备和物理性能研究 74、钛酸锶钡和氧化铈薄膜的制备及物理性能表征 75、PECVD氮化硅薄膜制备与微结构研究 76、空气环境下激光诱导金属靶等离子体物理参数测量 77、GPU在矩量法与物理光学法中的应用研究 78、二维波导结构中类电磁诱导透明及其物理机制的研究 79、Ⅱ-Ⅵ族核壳结构半导体量子点的制备及其光电特性和物理机制的研究 80、InGaAs/InAlAs量子级联激光器物理、材料及器件 物理学本科毕业论文题目三: 81、中红外波段锑化物激光器、探测器器件与物理研究 82、ZnO薄膜制备及性质研究 83、基于声矢量阵的高分辨方位估计技术研究 84、梯度铁电薄膜的热力学性质研究 85、锑化物激光器、探测器MBE生长与物理研究 86、大型工程结构模态识别的理论和方法研究 87、长波长垂直腔面发射激光器材料与物理研究 88、纳米薄膜力学行为的分子动力学模拟研究 89、脉冲激光沉积技术中等离子体演化及薄膜生长的模拟研究 90、熔石英元件离子束抛光物理规律与激光损伤特性研究 91、非合作目标水中物理场特性测量的定位技术研究 92、真空激光有质动力加速机制和物理特性的研究 93、等离子体薄膜表面制造中的偏压效应研究 94、高功率激光器前端系统关键物理问题与关键技术研究 95、导电聚合物纳米复合薄膜的制备及其氨敏特性研究 96、水下动目标被动跟踪关键技术研究 97、ZnO薄膜的掺杂和光电性质研究 98、自由基辅助磁控溅射制备ZnO:Al透明导电薄膜的研究 99、铁磁金属薄膜的高频性质 100、超精密运动平台中气浮支承振动特性的研究 101、浅海矢量声场及其信号处理 102、液相基底表面金属薄膜的形成机理和表面粗糙机制的AFM研究 103、自组织固态激光器阵列的调频混沌和相位锁定物理机制的研究 104、液相基底表面磁性薄膜的形成机理和物理特性研究 105、磁性与非磁性粗糙金属(Fe 106、平整与非平整基底表面磁性薄膜的物理特性研究 107、强激光在实验室天体物理中的应用 108、界面调制的功能氧化物薄膜制备与物理性能 109、自组织量子点与量子环物理性质的理论研究 110、水声声图测量技术研究 111、浅海甚低频声传播建模与规律研究 112、金属钛膜中氢对氦行为作用和影响的研究 113、SrTiO_(3-δ)薄膜与WTe_2晶体的磁电阻效应研究 114、硫化铅、硫化锌量子点的光物理特性研究 115、二硫化钼薄膜的制备及其光电探测特性研究 116、光纤端面几何参数干涉测量法物理方法简化 117、电大复杂目标散射时频域分析及RCS统计特性研究 118、深水顶张式立管螺旋侧板抑制VIV机理研究。
基于Vega的某激光末制导武器视景仿真关键技术
Abstract: There are some problems in the use of a terminal guidance weapon system, such as a lot of operations, complex procedures, high subsystem coordination degree. Therefore, the virtual operation simulation based on Vega was proposed in this paper. On the basis of analyzing the demand of weapon training, the key technologies were discussed on constructing the simulation models, realizing interoperation by input devices, screen simulation of observation results.
Key technologies of laser terminal guidance weapon visual simulation based on Vega
LIU Qingguo1* , ZHANG Junru2 , CHEN Lei3
( 1. Department of Self - propelled Artillery, Shenyang Artillery Academy, Shenyang Liaoning 110162, China; 2. Department of Training, Shenyang Artillery Academy, Shenyang Liaoning 110162, China;
基于OpenGL的通用视景仿真平台关键技术研究

Op e n GL b a s e d u n i v e r s a l s i mu l a t i o n p l a t f o r m a n d k e y t e c h n o l o g y r e s e a r c h
UU Z h o u . z h o u
们的需求 , 这 些 功 能都 可 以得 到满 足 1 2 1 。
来 并 且 可 以让 人 们 亲 身 拟 世 界 是
一
个 包 含 了 所 有 虚 拟 环 境 或 者 是 已 经 给定 了仿 真 环 境 的全
1 虚 拟 视 景 仿 真 平 台的 系统 组 成
像处理、 多媒 体 技 术 、 屏 显技 术 、 多 信 息 合 成 技 术 的 集 中体 现 。本 论 文 围 绕 ” 基于O p e n G L的 虚 拟 视 景 仿 真 平 台” 的 设
计、 开 发 及 实现 过 程 , 基于O p e n G L的 实例 开 发 环 境 , 实 现 了通 用 的 虚 拟 视 景 仿 真 平 台 , 虚拟仿 真结果最后验 证 了系
第2 1 卷 第 1 3期
V0 1 . 21
No . 1 3
电子设 计 工程
El e c t r o n i c De s i g n E n g i n e e r i n g
2 0 1 3年 7月
J u 1 . 2 0 1 3
基于 O p e n G L 的通 用视景仿真平 台关键 技术研 究
地形数据接 设备接 1 : 3
三维视景构造I 绘制管 . / = == == =
统 的 实现 性 和 正 确 性 。
关键 词 : 虚 拟 视 景 技 术 ;仿 真 ; 关键 技 术 ; O p e n G L 中图分类号 : T P 3 7 3 文献标识码 : A 文 章 编 号 :1 6 7 4 — 6 2 3 6 ( 2 0 1 3 ) 1 3 — 0 0 1 1 — 0 3
基于Creator视景仿真模型建模技术的研究与实现

基于Creator视景仿真模型建模技术的研究与实现【摘要】为了增强视景仿真系统的真实性和实时性,本文基于MultiGen Creator三维建模开发平台,研究了虚拟建模技术的特点和实现方法,使用了优化建模技术,构建了民族博物馆的三维立体模型,为后续的系统漫游奠定了基础。
【关键词】视景仿真;建模;Creator0 引言视景仿真技术广泛的应用于各行各业,特别是在建筑行业中,例如,建筑工程投标的时候,如果能够把设计的方案虚拟呈现出来,便可以把业主带入到未来的建筑物里参观,包括屋内装饰、门的高度、窗户朝向、采光多少等等,都可以看得到,构建的虚拟环境越真实,实时性越强,那么顾客身临其境的感觉就越明显,因此,创建模型准确度的高低,往往直接关系到应用实例的成败与否[1]。
本文将着手于建筑模型3D呈现这一视角,以某校民族博物馆为研究对象,在分析了基于MultiGen Creator 的三维建模的关键技术的基础上,合理综合利用相关技术,提出了基于Creator 的三维虚拟场景建模的优化技术和方法,并构建出民族博物馆的三维环境,做到了实物虚拟化,为进一步的仿真做准备。
实验结果表明这些技术的使用显著的提高了系统的实时渲染和响应速度。
1 建筑物虚拟场景的设计与实现对于民族博物馆的建模,重点针对建模中常见的问题以及系统真实性和渲染速度的要求,提出了建模的技术路线与方法,实现了民族博物馆虚拟场景模型,以供漫游引擎调用。
1.1 场景的构建流程民博建筑属于复杂场景,所以要采用拆分的思想,观察模型,将模型进行分组,然后分别创建group节点,在相应的组节点下进行建模,场景建模技术路线如图1所示。
图1 场景的建模技术路线1.2 虚拟场景建模1.2.1 数据采集数据采集是三维建模的主要依据。
数据采集的准确性决定了模型的精确度和整个场景的真实感的高低[2]。
场景外观与几何形状等数据主要来自场区平面图以及一些实物照片和视频文件,而纹理数据主要来自于后期处理过的摄影照片。
测地车模拟训练系统视景仿真模块关键技术
3 )为地形贴纹理 , 本程序采 用的是多重 纹理贴图 , 使
得 地形 效 果 更 好 , 图 2所 示 。 如
1 大 地场 景 生 成
主要 利 用 高 度 图 来 生 成 地 形 。 简 单 地 说 高 度 图 就 是
从~个 面上产生的位移 , 代表 了地形 的高低点 。生成步骤
如下:
1 )读取 R W 高度 图并将其 保存 在字 节数组 中。储 A 存在 “ R W” . A 文件 中的高度 图数据值 的范围是 0~25 可 5, 以利用 这 些 值 作 为高 度 数 据 ,5 2 5是 最 高点 , 0是 最 而
低点 。 图 2 多重 纹 理 贴 图
4 )天空盒 的绘制就 是画一个很 大 的能包 围地面的盒
的参 数方程可知 , 相机所 在 的 、 位置 坐标 可表示 为 ( 摄 z Y 值 保持不变 ) :
= 一1 0×sn yo × ̄ 8 ) i ( rt /1 0
: 一
1 0+1 0×CS y t / 8 ) Ofr ×w 10 o
其 中 1 摄 相 机 到 车 辆 的 距 离 , 这 个 坐 标 应 用 到 控 制 摄 0为 将
相 机的函数 g l kt 则 在 车辆旋转 的过程 中摄像机 的 l o a 中, uo
图 3 天 空 盒 绘 制
位 置也 不 断 的 随 车 辆 变 换 , 即可 实 现 摄 像 机 固定 在 车 辆 后 上方观察的模式 。
2 车 辆 运 动控 制
车辆运动是 通过 键 盘进行 控 制 的 , 括 启 动打 火 、 包 加
速 减 速 、 转 右 转 、 车 、 火 和 视 角 转换 等 功 能 。 左 倒 熄 1 )车 辆 的 打 火 和 熄 火 。对 车 辆 的 操 作 必 须 是 在 车 辆 的打 火 启 动 之 后 , 有 的操 作 完 成 后 进 行 熄 火 操 作 。 设 置 所
实时分布仿真环境下视景仿真系统的构建

信息科学Ⅵ裂群一_I l{实时分布仿真环境下视景仿真系统的构建朱时俊(杭州中大房地产集团有限公司浙江杭州310∞3)【箝要】随着仿真技术、计算机技术和网络技术的飞速发展,复杂系统仿真的应用领域不断扩大,对仿真过程的直观性、交互性和逼真度的需求日益提高.实时分布仿真环境下的视景仿真技术是仿真技术研究中的一项关键技术,因此对其进行研究具有重要的意义.对实时分布仿真环境下的视景仿真技术进行研究.分析实时分布仿真环境下视景仿真技术的需求,设计在实时分布仿真环境下视景仿真系统的构建,确定可行的软、硬件开发环境。
【关键词]视景仿真实时分布虚拟现实中田分类号l T P2文献标识码:^文章编号:1871_-7597(2∞8)081∞30—02一,序■仿真技术是以控制论、系统论、相似原理和信息技术为基础,以计算机和专物理效应设备(模拟再现真实世界环境)为工具,借助系统模型对实际或设想系统进行动态试验研究的一门综合性技术[1]。
虚拟现实技术,又称灵境技术,是20世纪末发展起来的一门崭新的综合性信息技术。
它集先进的计算机技术、传感与测量技术、仿真技术、微电子学技术于一体,利用计算机产生一种虚拟环境,通过视、听、触觉等作用,使用户产生身临其境感觉的交互式视景仿真,实现用户在该环境进行自然的交互。
视景仿真技术是仿真技术发展的一个新的方向,为现代仿真注入了新的活力,是虚拟现实技术、分布式交互仿真技术研究的主要内容之~。
视景仿真技术是一种基于可计算信息的沉浸式交互环境,它采用计算机图形图像技术,根据仿真的目的,构造仿真对象的三维模型并再现真实的环境,达到逼真的仿真效果。
视景仿真技术有利于缩短试验和研制周期,提高试验和研制质量,节省工程漫游、名胜古迹虚拟旅游、虚拟现实房产推销系统、建筑群火灾事故紧急撤离系统、虚拟现实模拟培训、交互式娱乐仿真等等。
特别是在军事领域,建立起在实时分布环境下的视景仿真系统对军事作战训练十分重要,例如运用场景模拟技术建立起一个虚拟的、非常逼真的电子战场环境,使攻防双方的作战人员沉浸在由计算机产生的作战环境中。
清华大学计算机系本科生全部课程详细介绍

本科生课程介绍课程名称中文英文讲课对象适用专业课程简介Introduct ion讲课教师高工课程名称中文英文讲课对象适用专业课程简介计算机辅助设计技术基础教程唐龙等4位清华大学出版Software Engineering Ian Summerville职称副教授使用教材参考书使用教材参考书Software Engineering: Theory and Practice, Shari, Lawrence Pfleeger全校选修+计辅本课程是计算机科学与技术系为全校本科生开设的一门重要的计算机专业基础课,目的是培养学生的软件力。
本课程以软件生命周期的主要活动为主线,从软件及软件工程的历史和发展、软件开发过程、需求分析、软件维护、软件项目管理、标准及规范等方面全面介绍软件工程的基本理论、方法、技术和工具。
书名作者Software Engineering: A Practitioner’s Approach, Roger S. Pressman主要研究领域:小波分析及其应用,科学计算可视化,计算机图形学,。
徐玉华(1)承担全校计算机辅助设计技术基础课教学课号: 00240033 学分: 3 课程属性:全校任选 开课学期: 秋季软件工程 孙延奎重点讲述计算机辅助设计的基础知识,为利用计算机解决本专业及相关领域中的问题打下必要的基课程主要内容包括:计算机辅助设计(CAD )技术的基本概念、原理、算法和软件使用。
具体内容为:CA础,二维变换、二维裁剪、二维图形的光栅显示、曲线曲面、实体造型、三维变换、三维形体的显示AutoCAD、3DSMAX5.0软件的操作方法以及OpenGL图形库的应用。
This course focuses on the basic concepts,principles,algorithms and applicationsdesign(CAD),it mainly consists of the following topics:software and hardware system of Ctransformations,line clipping,raster display of 2D graphics,curves and surfaces,soldimensional transformations,three-dimensional viewing,visible-surface determination,models,and introductions to AutoCAD,3DMAX 5.0and OpenGL.It is an ideal choice for slearn the rudiments of this dynamic and exciting CAD technology.主要教学领域:(1)承担全校计算机辅助设计技术基础课教学;(2)析及其应用课教学;姓 名 主要教学和科研领域(1)计算机图形学基础,清华大学出版社,1995(2)计算机图形学,孙家广,清华大学出版社(第三版),2000年(3)计算机辅助设计技术基础,孙家广,清华大学出版社(第二版),2000年9月(4)计算机辅助设计技术与应用,殷国富,科学出版社,2000年全校本科生理、工科专业课号:00240013 学分: 3 课程属性:全校任选 开课学期:秋、春计算机辅助设计技术基础 Fundamenta 书名作者出讲课教师讲师课程名称中文英文讲课对象课程简介Introduct ion讲课教师本课程为非计算机专业的本科生介绍人工智能的基本原理和方法的入门课程。
无人机编队飞行视景仿真关键技术研究
h t h s g d l wele l i p bly s o gp r b l a l it f aa a fr tes s m a ih f ei , lr a・ me a a it, t n o t i t d eibly o d t t se. y e h i t y t c i r a i n r a i y n r
smu ae aac m mu iain a d ra-i o to , ipa , e o dn d rds lyo o ain f ig aesu id i lt n rs lsp o eta i ltdd t o nc to e l mec n l ds ly r c r ig a e ipa n fr to yn r td e .Smu ai eut r v t n t r n m l o h
[ ywo d |vr a ai ; man dAe a eil UA ) o a o ;cn i l in ma - c iei eat n t te dr g Ke r s iu lel Un n e r l hce V fr t n se e mua o ; n mahn trc o ;e n ei t r t y i V ( m i s t n i xr n DOI 1 .9 9 .s . 0 —4 82 1.00 1 : 03 6/i n1 03 2 .0 21 .7 js 0
战场复杂电磁环境视景仿真研究

战场复杂电磁环境视景仿真研究战场复杂电磁环境视景仿真研究0引言现代高科技战争是高技术条件下立体的、多维的战争,是现代化的武器装备、信息、技术、通信、侦察、网络、高级决策能力之间的较量。
在此条件下,人们使用了种类繁多,参数多变的电子辐射武器,导致了战场空间的电磁环境空前复杂、密集、交迭。
面对如此复杂的战场电磁环境,进行相关的数字建模和仿真,对分析战场电磁环境和加快电子战系统的研制进程,以及对电子战性能做出有效评估具有十分重要的意义。
目前战场仿真研究的热点是利用虚拟现实技术,适应多武器平台攻防对抗作战的仿真要求进行高逼真度的视景仿真,把未来数字化战场环境贴近真实地模拟再现。
战场电磁环境视景仿真是指运用计算机仿真、可视化计算、多媒体、图形图像等技术,实现复杂电磁环境条件下战场的逼真呈现,并为作战模拟、分布交互仿真等提供虚拟的战场环境。
战场电磁环境视景仿真就是以电磁辐射仿真为核心,为作战仿真系统提供环境支撑的应用系统。
1系统总体设计战场电磁环境视景仿真系统的主要功能是,通过战场电磁环境仿真系统,生成虚拟战场电磁环境,并在此基础上开展仿真实验,使其作为武器系统效能评估、电子战演练等军事仿真的参考依据。
根据战场中射频电子武器装备的布局态势,综合分析和预测不同工作频率的各辐射源在战场空间某点的频率和场强,用于生成电子侦察和电子干扰仿真计算所需的作战想定和虚拟战场电磁环境。
系统采用视景仿真形式,形象直观地显示辐射源的布局设置,获得虚拟战场复杂电磁环境的综合电子沙盘。
战场电磁环境视景仿真具备电子战驱动能力,可以从电磁辐射角度对仿真结果进行分析和推演,提供一定方案的电子战驱动能力。
同时,系统得出的相关数据,可提供策略方案判断,如:通信网络规划、雷达与干扰威力估算、测向估计、辐射源与测向台布置辅助、航路规划辅助等实际应用功能。
战场电磁环境视景仿真是多系统、多学科、多层次的交叉应用体系。
仿真系统总体设计主要由4个模块组成,分别是虚拟场景仿真、电磁模型建立、电子兵力生成和综合计算与分析。
《协同制导及卫星自主导航技术研究》论文摘要编写

《协同制导及卫星自主导航技术研究》论文摘要编写关键词:数据链;传输延迟;效能评估;视景仿真;自主导航协同空战改变了传统意义上的空战模式,它将各作战单元有机结合在一起,实现了各作战单元之间信息共享、统一指挥、协同攻击及远程精确打击。
另外,随着航天技术的发展,微小卫星的价值受到普遍的关注,对其自主导航系统的性能提出了更高要求。
本文针对目前协同制导及自主导航系统方面存在的问题,开展了协同制导、数据链、视景仿真以及微小卫星自主导航等关键技术研究。
论文的主要研究工作和创新性成果主要表现在以下几个方面:(1)对协同制导过程中数据链传输延迟进行了建模及其补偿技术研究,提出了一种基于“当前”统计模型和自适应卡尔曼滤波器相结合的数据传输延迟补偿方法。
详细分析了协同制导过程,并在数据链信息传输过程分析的基础上,运用排队理论对影响数据传输延迟的系统服务时间和排队等待时间进行了建模;针对各作战单元目标信息量测的时空相对性,研究了目标信息时空归一化方法。
在此基础上,分析了数据链传输延迟对协同空战的影响,提出了一种基于“当前”统计模型和自适应卡尔曼滤波器相结合的数据传输延迟补偿方法。
研究结果表明,这种数据传输延迟误差补偿方法不仅能够有效减小由于数据传输延迟引起的目标位置误差,而且也大大提高了中末交班时导弹对目标的截获概率。
(2)提出了一种适用于协同制导系统作战效能评估的多层次模糊综合评估方法。
首先,根据协同制导过程建立了协同制导系统作战效能评估的指标体系,研究了目标跟踪能力、协同攻击能力和数据链系统性能对协同作战效能的影响情况;接着,针对协同作战效能评估过程中多任务、多指标的特点,结合三角模糊数理论和层次分析法,提出了一种适用于协同制导系统作战效能评估的多层次模糊综合评估方法。
利用该效能评估方法实现了对协同制导系统作战效能的评估,从而验证了协同制导系统的整体作战性能。
(3)对协同空战三维视景仿真技术进行了研究,开发了一套协同空战三维视景仿真演示平台。
通用飞行器视景仿真系统的研究与开发

通用飞行器视景仿真系统的研究与开发2.陆军装备部航空军事代表局驻哈尔滨地区航空军事代表室,黑龙江省哈尔滨市,150066)摘要:本文针对不同的半物理仿真试验台视景仿真系统无法兼容的问题,运用3DSMAX 进行模型的勾画和渲染以及数据类型转换,运用Unity3D进行模型素材集成以及和外围设备的通讯,使用的编程语言为C#,与主系统的交互采用TCP/IP的UDP协议,设计了一款通用飞行器视景仿真系统。
避免了不同飞行场景不同飞行器间匹配时的重复设计问题,降低了研发成本,缩短了研制周期,并且提高了系统集成度,现已在Y12F型机和Z9型机的半物理仿真试验台中成功应用。
实现了不同飞行场景和飞行器模型间的切换,并拥有多重视角变换功能,包含晴、雨、雪、雾四种天气,提高了视景仿真系统的通用性,对于飞行器视景仿真系统的设计具有指导意义。
关键词:视景仿真;Unity3D;飞行器;3DSMAX;三维建模Research and development of generalaircraft visual simulation systemFubo, Liuchang, Wangwen( Hafei Aviation IndustryCo.,Ltd,Haerbin,Heilongjiang,150066,China)Abstract:This article aims at the incompatibility of visual simulation systems ofdifferent semi-physical simulation test beds,uses 3DSMAX to sketch and render the model anddata type conversion,Unity3D was used to integrate model materials and communicate with peripheral devices, the programming language used is C#, the interaction with the main system uses the UDP protocol TCP/IP,designs a general aircraft visual simulation system.It avoids the duplicate design problem when different flight scenarios match different aircraft, reduce research and development costs , shorten the development cycle, and improve system integration, now it has been successfully applied in the semi-physical simulation test bench of Y12F andZ9.The switch between different flight scenarios and aircraft models is realized, and has multiple view conversion function, there are four kinds of weather ,including fine, rain,snowand fog,it improves the universality of visual simulation system and has guiding significancefor the design of visual simulation system of aircraft.1引言1随着飞行器技术的高速发展,视景仿真系统的重要性也日益凸显,需求也日渐多样化。
光电经纬仪模拟训练器的三维视景仿真研究
用 V sa c +作为开发工具来实现 。如图 1所示 , iu l + 构建视景仿真系 统主要经过 以下几个环节:
景物 , 采用粒子 系统来刻画 飞行器尾 焰的不规则变化现 象, 能够达到很好 的逼真度。 粒子系统 的基本 原理是用赋 予了某种属性 的微 小粒 子的随机运动来 描述导弹飞行尾焰的特 征。粒子 的初始属性确定 以后 , 每生成一帧 图像前 都要更新所有粒子的位置 、 颜色 、 生存器和速度等属 性。 绘制粒子系统的基 本步骤为: ● 在系统中产生新 的粒子 ● 赋予新生粒子一定的静态属性 ● 删 除在粒子系统 中存在但超过生命 周期的粒子 ● 对系统 中所有粒子的动态属 性进行更新 ● 显示所有粒子所组成的图形 对于新诞生的粒子, 其初始属性包括初始位 置、 初始速度加速度 、 初始 颜色 、 初始透 明度和生存器。这 些初始属 性由描述景物 的一系列随机 函数 来控制 。对于不同粒 子其初始属性必然不 同, 但所有粒 子的属 性总体统计 符合描述景物的控制 函数。 对 于已存 在的粒子 ,将在初始 属性上进行 活动,若 i I帧的粒子为 - f 第i 帧粒子为 f , i则有 : 位置: (i p(i) v f— (if 1 P f) f— + (i) f i = I 1 -一 )
速 度 : f = f一 + % f- ) v(i v( ) a (if一 ) 1 1
2 飞行器实体建模
飞行器的三维实体建模 是整个视景仿真 系统 的基础 , 要生成逼真的实 时仿真动画 , 首先要生成高质量 的三维实体模型 。O eG p n L提供 了了一系列 的函数 以绘制点、 多边形 、 线、 曲线 、 曲面等基本单元 , 后利 用基本图元按 然 照一定 的空间位置形成复杂 的几何物体 。 采用这种方法对于形状简单的物 体是较为容易 的, 但对 于形状复杂 的物体, 单纯利用这 种方法其工 作量是 非常大的, 而且不可能一次性 的在 内存 中编写所有的语句。 借助专业的建模 软件 3S A 进行建模 , D M X 然后 通过 O eG p nL函数在程 序中进行渲染模 型, 建模逼真度高且简单, 易控制 。 将建好的模 型调入到程序 中, 有几种方法可 以实现 。一种 是直接 编写 读取 } 3 s格式 的函数调 用模型 ,这种方法在 模型简单 时不 失为一种方 .d 法,因为只要用读取模型的函数直接调用 . d 3 s格式的文件就可 以了, 当 模型修 改或改变 时不用修改程序的其 它部分 。 但是当读取的模 型数据较为 复杂时, 则会影响系统的运行速度 , 因而可 以使用 另一种方法, 即用格式转 换软件先将模型文件进行转 换并利用 O eG pn L中的显示列表功能 ,将三维 场景中的实体分别定义为单独 的显示列表 , 预先 生成三维实体 。在系统运 行时只要调用所需要的显示列表 即可显示相应 的三 维实 体, 而不需要重新 计算 实体在场景 中的坐标 , 避免 了大 量的浮点运算 , 提高 了三维实 时动画 的显 示 速 度 。
微光双目系统低照度环境三维测量方法研究
摘要摘要双目立体视觉是计算机视觉的重要研究方向之一,该技术被广泛应用于工业、农业、医学等领域,对于提高生产效率及生活质量有重要意义。
微光双目视觉是指在光强微弱的环境下进行图像获取和立体匹配。
由于在黑暗环境中拍摄的图像会受到随机噪声的影响,因此如何获取精确的微光图像立体匹配深度图是一个具有挑战性的问题。
本文针对这一问题,围绕立体匹配算法展开研究,主要分为以下两个部分:本文提出了一种结合区域信息来增强局部噪声像素鲁棒性的匹配算法。
该算法改进了传统的半全局匹配算法,改进分为两个方面:首先,双目视觉获取的两幅图像进行图像分割获取区域信息,通过加入结构软约束解决动态传播路径不完全的问题。
其次,在特征提取模块通过将Census算子由二元改进为三元降低噪声的影响。
该算法分别在Middlebury公开数据集,通过加噪处理的仿真数据及真实采集的微光数据上进行了验证,实验结果表明,本文提出的改进算法降低了微光双目受噪声的影响,提高了微光立体匹配的准确度。
此外,本文针对微光数据对神经网络算法进行调研,考虑到金字塔立体匹配算法(PSM,Pyramid Stereo Matching)在匹配代价计算模块融入了不同位置和尺度的环境信息,本文提出了将该算法应用在微光数据上,并在预处理及后处理部分进行了相应的改进。
该算法分别在KITTI公开数据集,通过加噪处理的仿真数据及真实采集的微光数据上进行了验证,实验结果表明,该算法在微光立体匹配上有好的匹配性能。
关键词:立体视觉,微光,随机噪声,神经网络,区域信息AbsrtactAbstractBinocular stereo vision is one of the important research directions of computer vision.It is widely used in industry,agriculture,medicine and other fields.It is significant to improve production efficiency and quality of life.Low-light binocular stereo vision is to obtain images in low-light environment.Images taken in dark environment will be affected by random noise,hence how to obtain accurate depth maps of low-light stereo matching is a challenging problem.For this problem,this paper does some research about the low-light stereo matching algorithms,the main research has the following two aspects:In this paper,a matching algorithm based on regional information is proposed to enhance the robustness of local noise pixels.This algorithm improves the traditional semi-global matching algorithm.The improvement can be divided into two points:Firstly,two images acquired by low-light cameras are segmented to obtain region information,and the problem of incomplete dynamic propagation path is solved by adding structural soft constraints.Secondly,in the feature extraction module,the Census operator is improved from binary to ternary to reduce the influence of noise.The algorithm is validated on the Midllebury data set,synthetic data and real world data captured by low-light camera in darkness.The experimental results show that the improved algorithm reduces the influence of noise on low-light vision and improves the accuracy of low-light stereo matching.In addition,this paper studied the neural network.Considering that pyramid stereo matching incorporates environmental information of different locations and scales into the matching cost calculation module,this paper selected this algorithm.In addition,image pre-processing and post processing are added for the low-light data. The algorithm is validated on KITTI data set,synthetic data and real world data.The experimental results show that the algorithm perform better in low-light data.Key Words:Stereo vision,Low-light,Random noise,Neural network,Regional information.目录目录第1章引言 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)1.2.1立体匹配研究现状 (2)1.2.2微光立体测距研究现状 (5)1.3主要内容和结构安排 (7)第2章相关技术理论 (8)2.1双目立体视觉理论 (8)2.1.1摄像机成像模型 (8)2.1.2摄像机标定 (11)2.1.3双目立体视觉原理 (15)2.2微光成像理论 (19)2.2.1微光成像概念 (5)2.2.2微光成像探测器 (19)2.2.3微光成像技术的发展与应用 (20)第3章基于区域信息的微光图像匹配算法研究 (22)3.1传统半全局图像匹配算法 (22)3.1.1匹配代价计算 (22)3.1.2代价聚合之动态规划 (24)3.2改进的图像匹配算法 (26)3.2.1获取区域信息 (27)3.2.2匹配代价模块 (29)3.2.3代价聚合模块 (34)3.3视差计算及视差优化 (35)3.4传统改进算法实验结果分析 (37)3.4.1Middlebury数据集 (37)3.4.2仿真数据 (38)3.4.3对比分析 (40)微光双目系统低照度环境三维测量方法研究3.4.4微光数据的实验结果 (43)3.4.5讨论 (44)第4章基于深度神经网络的图像匹配算法研究 (47)4.1深度神经网络的基础知识 (47)4.2基于深度神经网络的立体匹配方法 (50)4.2.1卷积神经网络 (51)4.2.2空间金字塔池化模块 (52)4.2.33D CNN (54)4.3针对微光数据的改进模型 (56)4.4深度神经网络算法实验结果分析 (59)4.4.1KITTI公开数据集 (59)4.4.2微光数据的实验结果 (60)4.4.3传统改进算法与该改进模型的对比分析 (62)第5章总结与展望 (64)5.1总结 (64)5.2展望 (64)参考文献 (67)致谢 (73)作者简介及在学期间发表的学术论文与研究成果 (75)第1章引言第1章引言1.1研究背景及意义随着经济水平与科学技术的飞速提升,智能产品的出现给人们生产及生活带来很大的变化。
基于VR的虚拟视景系统关键技术研究
机, 而综合了计算机 、 图形处理与 图像 生成 、 网络通信等诸 多
高新技术发展 而来 的视景仿 真技 术是 现代仿 真技术 的一 个 新 的研究领域 … , 基于此 技术 的虚 拟视景 系统 为城 区漫游 、 室内设计 、 工业仿 真 、 军事模 拟等行 业提 供 了一个全 新 的手 段, 通过键 盘, 鼠标 、 示器来 营造一个 虚拟环 境 , 用户 在 显 使 此虚拟环境 中获 得接 近于现 实 的“ 浸感 ” “ 沉 和 交互 感 ” 从 , 而使各种设计实施方 案得 到虚拟 实现 , 可 以反 复修 改 , 并 为
第2卷 第1期 5 1
文章编号 :0 6—94 ( 0 8 1 —0 3 o 10 3 8 20 ) 1 23一 5
计
算
机
仿
真
2 8 1 0 年1月 0
基 于 V 的虚 拟 视 景 系统 关键 技术 研 究 R
钟 啸, 高 颖, 益 , 费 张普照
( 北工业大学航海学院ቤተ መጻሕፍቲ ባይዱ, 西 西安 707 ) 西 陕 10 2
k y tc n lg e e h oo y,a d d s u s s t e k y p o lms s c sts n lss t s e o o i o , n h mp e na in o n i s e h e r b e u h a a k a ay i ,a k d c mp st n a d t e i l me tt f c i o
摘要 : 讨论了虚拟视 景系统 的应用背景 , 研究分析了三维视景 软件 O e G p n VS的使用 , 基 于 V v ta ra) 对 R(iul e1 技术进行 开发 r
飞行模拟器视景仿真系统的优化设计与实现途径探索

航空航天科学技术科技创新导报 Science and Technology Innovation Herald2①作者简介:白小亮(1979,2—),男,汉族,河北唐山人,硕士,中级职称,研究方向:航空航天系统仿真、视景仿真、飞 行模拟器。
DOI:10.16660/ki.1674-098X.2020.09.002飞行模拟器视景仿真系统的优化设计与实现途径探索①白小亮(天津中天翔翼航空科技有限公司 天津 300457)摘 要:飞行模拟器视景仿真是飞行训练中不可或缺的重要组成部分,作为真实天气现象、飞行情况的模拟,不仅能通过真实情境的模拟提升飞行训练内容的真实度,更能通过复杂教学情境训练飞行员的应激反应、复杂问题处理等相关技能,实现结果导向训练成效。
因此,飞行模拟器视景仿真系统的功能设计和内容构成布局的合理与否,对于训练成效具有直接影响。
本文就飞行模拟器视景仿真系统存在的主要问题提出优化设想,并在此基础上研究实现途径。
关键词:飞行模拟器 视景仿真系统 优化设计 实现途径 中图分类号:TP391.9 文献标识码:A 文章编号:1674-098X(2020)03(c)-0002-02视景系统是用来模拟飞行员的视野,将飞行器之外的包括气象等所有与飞行任务有关的景象全景式呈现在飞行员面前,帮助飞行员判断出飞机飞行的速度、位置、飞行高度、飞行姿态等,并根据计算机成像模拟飞行状况经多屏幕显示出来,帮助飞行员实现飞行训练的专门性系统。
飞行模拟器视景仿真系统虽是模拟系统,但对飞行员的实际操作能力的养成提供了前期技能训练手段,因此对于飞行员专业素养的培养和飞行经验的成长具有重要意义。
航空飞行是一个集气象、空中状况和地面状况为一体的复杂场景,因此飞行员的训练周期和培养周期相对较长。
当前我国已经能够实现民用飞行模拟器自主研发,是世界上为数不多的具有自主研发能力的国家之一,为我国民用航空飞行员的培训和成长做出了突出的贡献。
计算机与信息技术应用基础课件-第5章 虚拟现实与增强现实技术概论

AR使图书更 加立体生动
1
AR发展
AR技术将成为市 2 场营销的卖点
AR将成为医
6
3 车载系统结
生的“助手”
4
合AR技术
AR使娱乐拉近现实
VR与AR的区别
VR
AR
全都是假的
半真半假的
把人的意识带入到一个虚 把虚拟的信息带入到现实世
拟的世界里
界中
虚拟的入口
虚拟与现实的连接入口
2. 狭义角度的定义
从狭义的角度讲, 虚拟现实可以看作 一种具有交互特征 的人机界面,亦可 以称之为“自然人 机交互界面”。
5.1虚拟现实基本概念
5.1.2虚拟现实技术特性
沉浸感 (Immersion)
交互性 (Interaction)
I3
想象力 (Imagination)
5.2 虚拟现实系统
5.2.1虚拟现实系统的构成
分布式虚拟现 6 实技术的展望
1
VR发展 趋势
4
实时三维图形生 成和显示技术
新型交互设 备的研制
智能化语音虚拟现实建模
5.5增强现实基本概念
5.5.1定义
先感受增强现实,更容易理解概念!
5.5增强现实基本概念
5.5.1定义
增强现实(Augmented Reality,简称AR),是 一种实时地计算摄影机影像的位置及角度并附 加上相应图像的技术,这种技术的目标是把虚 拟世界与真实世界结合并进行交互。通俗的讲, 增强现实就是把计算机产生的虚拟信息实时准 确的叠加到真实世界中,将真实世界与虚拟对 象结合起来,构造出一种虚实结合的虚拟空间。
消费者借助AR 技术将虚拟家 具呈现在家中, 通过观察大小、 颜色是否合适, 决定摆放位置 和是否购买。
光电模拟仿真技术概述
北京市海淀区中关村南大街5号 北京理工大学 光电成像与信息工程研究所 邮编:100081
19
4. 半实物模拟仿真的关键技术
几种典型的红外目标仿真器 实现红外目标仿真的方法可分为热辐射法和可见光—红 外图像变换法两大类: 热辐射法包括直接产生红外辐射和通过温度控制产生红 外辐射两种; 可见光~红外图像变换法是利用可见光~红外图像变换 器将可见光进行波长变换,生成红外图像。
2007-2
北京市海淀区中关村南大街5号 北京理工大学 光电成像与信息工程研究所
邮编:100081
5
2.光电系统模拟仿真技术的分类
仿真技术从50年代以来随着计算机发展的过程,逐渐形成 了一门新兴的综合性技术学科,它涉及到系统分析、控制理论、 计算方法和计算机技术等。 仿真技术按所用模型的类型不同分为计算机数字仿真和物 理模拟仿真。计算机数字仿真是指在建立数学模型后直接在计 算机上重现系统的各个环节。物理仿真指利用实物提供模拟实 际工作状态来评估和演示装臵或系统的技术性能,它包括实物 仿真和半实物仿真。实物仿真所采用的模型和原型相近,其仿 真条件和环境也与实际条件和环境类似。半实物仿真采用部分 实物模型,其它如环境或条件等则利用数学模型代替。
2007-2
北京市海淀区中关村南大街5号 北京理工大学 光电成像与信息工程研究所
邮编:100081
7
3.光电系统的半实物模拟仿真
其他相关模 型及计算软 件
输出相关数据
目 标 及 背 景 输出图像 模拟防止器
实际成像系 统
输出图像
图像信息处 理与分析
输出分析结 仿真结果显 果 示
噪声模型及 仿真软件
输出模拟噪声
物 理 模 拟 仿 真 系 统
地下洞室视景仿真系统关键技术研究与实现
视景仿 真技术最早起源于 2 0世纪 5 0年代,至今 已经取
这样大大降低了建模难度 , 也为场景驱动时进行可见性判断、 提高系统 的实 时性打好基础。 () 4洞内通风管道、道轨 、挡墙采用几何建模方法 ,风机 房门、配 电间门、工号门、挡墙 门、电缆、照明灯等采用在 简单面上贴 图实现 ,并将需要在实 时系统中进行 交互操作的 门定义为 DO F类型节点。 () 5洞室廊道主体采用截面拉伸 的方法得到 ,廊道交叉部 分通 过相 交实体作布尔加运算得到 。对于曲率变化迅速 的地 方 ,通 过手工移动顶点等方法对模型进行修改完善。洞室整
中圈分类号: P9. T31 9
地下洞室视 景仿 真 系统关键 技 术研 究与实现
张 静 ,毛 虎
(. 安交通大学计算机系 ,西 安 7 0 4 ;2 西 北核技术研究所 ,西安 7 0 2 ) 1西 10 9 . 10 4
摘
要:研究 了纹理映射、碰撞检测 、模型动态调度技术、对 象抬取等仿真关键技术 ,提出了可行 的应 用解决方案。基于 Ce t 构建了 r o ar
行业领域。虚拟故宫、虚拟珠峰漫游系统都 是视景仿真技术
应用的成功案例 。今后视景仿真技术主要向动态 环境建模技
地 下洞室和洞室地表三维模型数据库 ,利用 V g 建立虚拟场景并进行仿真驱动 ,结合 V + 和 V g P 编程技术完成 了系统应用层设计 ea c + e aA I
和应用程序发布及一套地下洞室的视景仿真系统 。 关健 词:视景仿真 ;纹理映射;碰撞检测 ;动态调度 ;对象抬取
Re e r h a m p e e t to fKe e h o o y 0 a -i e s a c nd I l m n a i n 0 y T c n l g fRe lt m
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
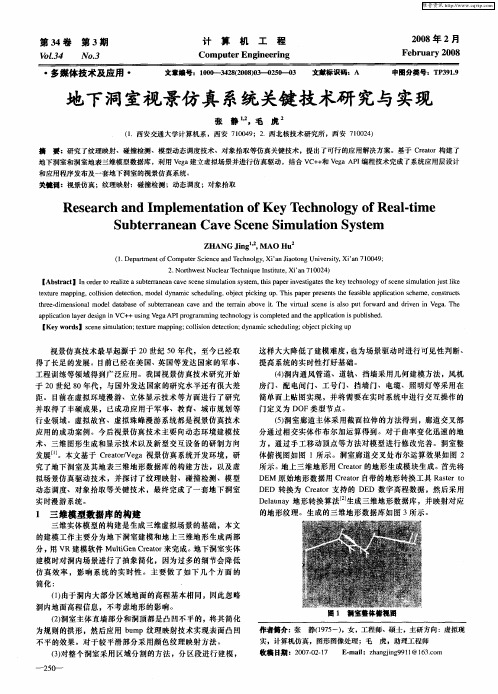
图 5-4 地形模型存储数据的三种方式
Fig.5-4 3 kinds of data storage modes of the terrain model
其中,三角网的采样点的分布可以是不规则的,可以按地形的起伏变化灵活的改变 取样密度,这样,较好地顾及了地貌特征,同时也可以减少数据冗余和失真。因而它比 较适用于实时动态地形仿真方面。但是对于 OpenGL 来说,上面所提到的三种数据格式都 不能在 OpenGL 程序中直接显示,我们还必须利用 OpenGL 提供的 API 来进行绘制, OpenGL 中提供了对点、线、多边形的绘制原语,但是要求给定的多边形必须是凸多边 形,所以一般采用三角形作为地形的表示单元,因为只有三角形才不可能被扭曲到使三 个顶点不在一个平面上。本系统地形就是采用了不规则三角网格式来建立的。
第五章 视景仿真关键技术研究
5.1 海底场景坐标系的相关技术
5.1.1 几何变换
所有的图形可视化系统的运动模型都是建立在坐标系基础之上的,因此,首先需要
建立起合适的鱼雷运动可视化系统的坐标系,本系统为了和 OpenGL 的规定保持一致, 采用右手坐标系,世界坐标系又称全局坐标系,是鱼雷在运动过程中的参考坐标系。系
目前,地形模型的存储数据表达方式主要有规则网格、不规则三角网和等值线这三
31
种形式,如图 5-4 所示。
(a) 规则网格式
(b) 等值线式
(c) 不规则三角网式
(a) The regular grid type
(b) The isoline type
(c) The anomalous triangular grid type
⎡ cosθ sinθ 0 0⎤
[x*
y*
z*
1] = [x
y
z
1]
⎢⎢− sinθ ⎢0
cosθ 0
0 1
0⎥⎥ 0⎥
⎢ ⎣
0
0 0 1⎥⎦
3.缩放变换
若缩放变换的参考点为(xf,yf,zf),其变换矩阵为:
⎡ 1 0 0 0⎤ ⎡sx 0 0 0⎤ ⎡ 1 0 0 0⎤
⎢ ⎢
0
1
0
0⎥⎥
⎢ ⎢
0
32
图5-5(b) 海底地形 Fig.5-5(b) The benthal terrain
5.2.2 海底环境的光照模型
OpenGL 光照模型将光照分为四个独立的部分:环境光,散射光,镜面反射光和发 射光,这四种光被分别计算,然后叠加起来。环境光是指经过多次反射而来的光,无法 确定其最初的方向,但当特定的光源关闭后,它们将消失。全局环境光并非来自特定的 光源,这些光经过了多次散射,已经无法确定其光源位于何处。散射光来自同一方向, 照射到物体表面后,将沿各个方向均匀反射,因此,无论从哪个方向观察,表面的亮度 都相同。镜面反射光来自特定方向,也被反射到特定方向。镜面反射度与之相关。材质 发射光用于模拟发光物体。在 OpenGL 光照模型中,表面的发射光增加了物体的亮度, 它不受光源的影响,另外,发射光不会给整个场景中增加光线[9]。
系统中最基本的几种几何变换包括平移变换,旋转变换,缩放变换。
1. 变换矩阵[9] 三维图形的几何变换矩阵可用 T3D 来表示,其形式如下:
⎡ a11 a12 a13 a14 ⎤
T3D
=
⎢ ⎢
a21
⎢ ⎢
a31
a22 a32
a23 a33
a24
⎥ ⎥
a34
⎥ ⎥
⎣a41 a42 a43 a44 ⎦
(5.1)
观察图 5-3 的投影,显示屏四边形区域向后扩展成梯形区域。透视投影将距离近的 物体显示较大,将距离观察点远的物体显示较小。透视点到视点的连线与屏幕的交点为 显示点,遵循上述规律,在透视投影中显示立体图形优势就很明显了。
5.2 海底视景仿真
一个优秀的海底视景仿真系统是一个很复杂而且具有一定模糊性的信息决策和信 息控制系统。它的模型的创建和实现都比较复杂,分析和处理仿真数据时工作量都非常 大。要建立一个复杂的虚拟场景,建立场景中的模型是很重要的一步。虚拟环境模型的 建立是视景仿真技术的核心内容,虚拟环境建模的目的主要是获取实际三维环境的三维 数据,并根据应用的需要,把获取的三维数据绘制成相应的虚拟环境模型。本文场景中 的实体模型主要采用建模软件3D Studio MAX来建立,在它提供的界面下导出生成3DS 格式的文件。
⎡ a11 a12 a13 ⎤
T3D 可分为 4 个矩阵,其中:⎢⎢a21
a22
a23
⎥ ⎥
产生缩放、旋转、错切等几何变换,[a41
⎢⎣a31 a32 a33 ⎥⎦
a42 a43]产生平移变换。
2.平移变换
⎡ 1 0 0 0⎤
[x*
y*
z*
1] = [x
y
z
1]
⎢ ⎢
0
⎢0
1 0 0⎥⎥ 0 1 0⎥
29
(5.3) (5.4) (5.5)
(5.6)
系统中采用 MFC 提供的定时器触发模式来实现三维动画的。Windows 提供的基于 定时器(Timer)的动画技术是按照固定的时间间隔向程序发送绘制消息,系统根据更新的 数据来实现运动实体的位置、姿态的变化。
5.1.2 投影变换
投影方法是空间中的物体映射在假定屏幕上的方式。一般定义为两种投影方式:平 行投影(Orthographic Projection)和透视投影(Perspective Projection)[9]。
(1) 平行投影 OpenGL 首先假定屏幕存在。因为透过屏幕与透过现实生活中的窗口观察物体不同, 屏幕中的物体已经不可以相对观察者变化了,所以 OpenGL 又为屏幕设定了一个观察位 置,即距离屏幕一定距离的一个观察点 A。A 位置的不同在平行投影中对屏幕的影像不 会有影像。图 5-2 是一种平行投影的方式,B 处为显示屏,“光线”由 C 处平行照射在 屏幕上,将影像显示在屏幕上。
33
(2)选择光照模型:其包括四项内容,即全局环境光强度,观察点靠近场景还是位于 无穷远处,对物体的正面和背面是否采用相同的光照计算,以及是否将镜面反射颜色同 环境颜色和散射颜色分开,并在纹理操作后应用它。函数 有:glLightModelfv(GL_LIGHT_MODEL_AMBIENT,lmodel_ambient),
在海底视景仿真中,海底环境的仿真是基础。鉴于海底环境的特殊性,其仿真方法 与其它的仿真系统比如陆地仿真、天空仿真等相比有着比较大的差异,主要表现在海底 环境的光照模型、海底地形生成和海水的效果渲染等几个方面。
5.2.1 海底地形的生成
在视景仿真系统里,具有真实感的三维海底地形有着广泛的应用,它不仅可以用来 制作虚拟现实环境中的各种海底环境,还可以提供地理信息系统中资源的三维定位、地 理查询、路径规划等功能。另外,它在舰船导航、海洋勘探、电影制作、游戏娱乐等方 面都有比较好的应用前景。正是由于真实感三维海底地形的应用十分广泛,所以它引起 了图形研究者们很大的兴趣。图形研究者们在这个领域做了大量的研究工作,也取得了 较大的进展。真实感三维海底地形绘制的最大难点在于如何在三维海底地形模型上随着 视点及其它需要(如显示比例等)实时地模拟真实海底地形的各种状态。鉴于实际上的海 底地形结构十分复杂,所以建立和计算海底地形的物理模型十分困难,并且由于海底地 形本身的特异性决定了其存储数据量非常庞大,要实时地模拟某一特定地形上的动态变 化也比较困难。
对于纹理映射,一般地说,纹理定义在一个二维的平面区域,可以用数学函数解析 地表达。在这个平面区域里的每一个点都定义有一个灰度值或颜色值,则称该平面区域 为纹理空间。在图形绘制时,应用纹理映射方法可以确定三维景物表面上任一可见点 P (i ,j ,k),在纹理空间的对应位置(x ,y),而(x ,y)处所定义的颜色值描述了三维景物表面 P(i ,j ,k)点的纹理属性。从数学的观点看,纹理映射 F 可用下式来描述:(x ,y)=F(i ,j ,k)。
sy
0
0⎥⎥
⎢ ⎢
0
1
0 0⎥⎥
⎢ 0 0 1 0⎥ ⎢ 0 0 sz 0⎥ ⎢ 0 0 1 0⎥
⎢ ⎢⎣
−
x
f
−yf
−zf
1⎥⎥⎦
⎢ ⎣
0
0
0
1⎥⎦
⎢ ⎢⎣ x f
yf
zf
1⎥⎥⎦
⎡ sx
0
0
0⎤
⎢
=
⎢ ⎢
0 0
sy 0
0
0⎥⎥
sz
0⎥
⎢⎢⎣(1− sx ) ⋅ x f (1− sy ) ⋅ xy (1− sz ) ⋅ xz 1⎥⎥⎦
统中取海底任意一点为坐标原点,向东的方向为 X 轴方向,垂直向上为 Y 轴的正方向, 南方为 Z 轴的正方向。
鱼雷的物体坐标系原点在鱼雷上,鱼雷绕世界坐标系的 X 轴的旋转角为俯仰角(α), 逆时针为正,绕世界坐标系的 Y 轴旋转角为偏航角(φ),逆时针为正方向,绕世界坐标 系的 Z 轴旋转角为滚转角(ψ),同样也是以逆时针为正方向。
glLightModelfv(GL_LIGHT_MODEL_LOCAL_VIEWER,lmodel_viewer),……其中近 视点还是远视点只影响镜面反射区的计算。
(2) 透视投影 另一种投影模式就是透视投影,OpenGL 首先假定屏幕存在,并为屏幕设定一个观 察位置,即距离屏幕一定距离的观察点 A,图 5-3 是一种透视投影的方式,B 处为显示 屏,“光线”由 C 处照射到屏幕上,并将影像显示在屏幕上。
30
A
B
C
图 5-3 透视投影 Fig.5-3 Perspective projecty*
z*
1] = [x
y
z
1]
⎢⎢0 ⎢0