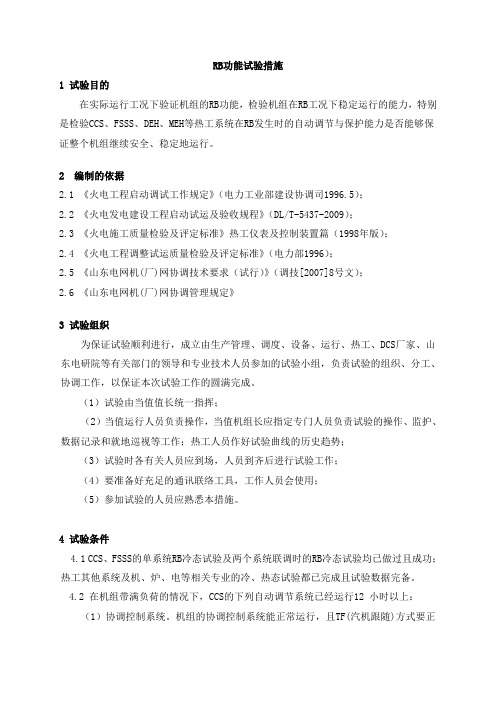
RB控制系统试验
RB 试验

3.2.3 RUNBACK 功能3.2.3.1 RB 动作条件与项目汽动给水泵 RB每台汽动给水泵出力按照200MW 计算,电动给水泵出力按照90MW 计算,当发生一台汽动给水泵跳闸且负荷大于200MW 时,触发RB 动作,RB 目标负荷180MW。
送/引风机/空预器RB每侧风烟系统出力按照200MW 计算,当发生一侧风烟系统跳闸(送风机/引风机/空预器跳闸)且负荷大于200MW 时,触发RB 信号,RB 目标负荷180MW。
一次风机 RB每台一次风机出力按照200MW 计算,当发生一台一次风机跳闸且负荷大于200MW时,触发RB 信号,RB 目标负荷180MW。
3.2.3.2 RB 动作后逻辑情况1) 当 RB 动作时;自动按照AB1-AB3-AB2-AB4(油枪)顺序间隔3 秒依次投入AB层燃油组和A 层少油点火装置(A 层少油点火运行人员可在操作画面,根据机组运行状态选择是否投入)。
当以上RB 动作时A 磨煤机和B 磨煤机均不在运行状态时,按照CD1-CD3-CD2-CD4(油枪)顺序间隔3 秒依次投入CD 层燃油组。
2) 当RB 动作,若机组运行磨煤机台数≥3 时直接跳闸E 磨煤机; E 磨煤机跳闸后8s(若RB 发生时,E 磨没有运行,则直接跳闸D 磨;一次风机RB 时延时2秒),当运行磨煤机台数≥3 时跳闸D 磨煤机;D 磨煤机跳闸后7s(若RB 发生时,若D 磨没有运行,则直接跳闸C 磨),当运行磨煤机台数≥3 时跳闸C 磨煤机;最终保持两台磨煤机处于运行状态。
3) RB 动作后协调方式切为机跟随滑压方式,滑压速率(0.3MPa/min)压力设定值依据RB 滑压曲线设定。
4) RB 发生后,减温水调门维持自动状态,超驰关闭30 秒。
5) 汽泵跳闸触发给水泵RB 时,电泵联启2 秒后,勺管从30%按照一定速率开至x%(x%为RB 前负荷对应的函数f(x))。
函数由调试期间根据实际情况整定。
RB试验方案-

RB试验方案1.1 协调控制系统协调控制系统采用间接能量平衡方式,协调汽机、锅炉,使机组满足负荷需求,维持主汽压力在给定值,保证整个机组的安全、经济运行。
系统设计有RUNBACK功能,当机组辅机异常时,系统自动切换到安全运行方式。
协调控制系统设计有以下功能回路:a. 单元负荷指令处理回路、机前压力设定值处理回路、机组最大出力运算回路、参数越限迫升/降回路、闭锁增/减回路b. 运行方式及方式选择回路:系统有五种运行方式(基本方式、汽机跟随方式、锅炉跟随方式、炉跟机协调控制方式、机跟炉协调控制方式)。
c. 负荷RUNBACK回路:当下列任一条件存在时,将发生负荷RUNBACK请求。
此时系统系统工作在机跟随协调控制方式,维持机前压力,随着锅炉出力的降低将机组负荷降到辅机对应的出力水平。
1.1 RB试验内容负荷大于180MW,运行中一台引风机跳闸产生RB。
目标负荷160MW,减负荷速率为50MW/min; λ一台空预器运行中跳闸则跳同侧引风机,按引风机RB处理。
负荷大于180MW,运行中一台送风机跳闸产生RB。
目标负荷160MW,减负荷速率为50MW/min。
λ负荷大于180MW,运行中一台一次风机机跳闸产生RB。
目标负荷160MW,减负荷速率为50MW/min。
λ负荷大于180MW,运行中一台给水泵跳闸且备用泵没有联启,产生RB。
目标负荷150MW,减负荷速率为50MW/min。
λ负荷大于210MW,运行中一台磨跳闸余两台磨运行,产生RB。
目标负荷190MW,减负荷速率为40MW/min。
λ负荷大于160MW,运行中一台磨跳闸余一台磨运行,产生RB。
目标负荷135MW,减负荷速率为40MW/min。
λ注:各项RB的负荷目标值和减负荷速率待讨论后最终确定。
2 RB试验目的2.1当机组主要辅机故障跳闸造成机组实发功率受到限制时(协调控制系统在自动状态),为适应设备出力,协调控制系统强制将机组负荷减到尚在运行的辅机所能承受的负荷目标值。
火电厂RB功能设计与试验方法

OR
A008S0023N0043
AB
CMP
GEL A008S0023N0001
HISP
H
A008S0023N003
CCS方式
6
1:8:21 D08P021C
RB投退按钮
PK1
KEY PK2 BOARD PK3
PK4
P008K023A
AND
A008S0023N0039
S1 R0
A008S0014N0063
任一RB动作
DIN
1:8:23 D08P023TAGRG
OUT
ACT
A008S0014N0025
D08P014B
D08P014C
负荷指令
1:8:11 A08P011C
偏置
f(x)
A008S0014N000 8
AI
A008S0014N0020
ParaSelect Gain Lead Lag
A008S0023N0017
Hale Waihona Puke ORA008S0023N0040
AB
CMP
GEL A008S0023N0006
AND
A008S0023N0022
DIN TARG
OUT
ACT
A008S0023N0042
N
A008S0023N0024
OR
任一RB动作
A008S0023N0023
RB保护投入
D08P023H
RB保护退出
按一定的时间间隔以从上往下(直流炉从下往上)的顺序跳磨 煤机、给煤机,直至与要求的负荷相匹配(一般为保留三台 或二台磨煤机)。 ②迅速关闭跳闸的磨煤机、给煤机进出口门。
百万机组给水泵RB试验总结

一、给水泵 RB 试验的相关说明1、当 RB 发生后,其主要动作过程如下:1) 机组协调画面上 RB 动作指示报警并显示给水泵 RB 首出。
2)给水泵 RB 后,燃料 RB 一并触发。
3) 机组协调控制系统由 CCS 方式切至 TF 方式,锅炉主控切为手动状态(需要指出:炉主控并非真正意义的手动,RB 状态下是非同正常方式的“协调”,也就是说运行人员 RB 期间无炉主控的干预权利),其指令为不同 RB 负荷目标值, DEH 切换为初压控制方式(需要指出:RB 状态下运行没有初压切限压的权限),通过调整调门开度控制主汽压力按照滑压设定值及滑压速率逐渐降低,给水泵 RB 的相关控制参数如表1 所示。
表 1 给水泵 RB 相关参数4)RB 发生后,给水泵保持自动方式运行,按锅炉主控指令要求的给水流量进行调节;送风机保持自动方式运行,按燃料量要求的总风量进行调节。
5) RB 发生后,过热、再热器减温水联关至 0%,然后转为自动调节。
6) RB 过程中,闭锁给水泵小机MEH 中转速偏差大切手动功能。
7)给水泵转速上限 5300 转/分(因正常上限与超速动作值过近,RB 前临时异动修改),正常转速上限5500 转/分。
二、给水泵 RB 简要过程21:35 给水泵小机 A 跳闸,触发给水泵 RB 发生,磨煤机 F 跳闸,延时 5秒后,磨煤机 E 跳闸,延时 5 秒后,磨煤机 D 跳闸,自动投入 A/B 层等离子;给水泵 B 在 RB 后 21 秒内转速由 4906 转/分提升至 5181 转/分;炉膛负压由-77Pa 瞬间降至-371Pa后又迅速上升至 -34Pa,逐渐恢复为-100Pa 左右稳定;机组由协调运行方式(CCS)切为汽机跟踪方式(TF)运行总燃料量由 419t/h 快速下降为221t/h;省煤器入口流量由 2612t/h 快速下降至 1457 t/h;主蒸汽温度由 585 度下降至 550 度,后又逐渐恢复至 585 度,未发生超温现象, RB 过程水冷壁最高点温度最高涨至 470度;19 分钟后,机组负荷由950MW 下降483MW,主蒸汽压力也由25.24MPa 下降至15.3MPa,机组已进入稳定运行状态,操作员手动复位 RB。
RB试验方案

RB试验方案1.试验目的Run Back(RB)功能是协调控制系统(CCS)的重要组成部分,是指机组的重要辅机出现异常和故障情况下负荷指令和燃料量快速反应,以保证机组继续安全运行。
RUNBACK试验的目的在于考核机组正常运行时,一旦发生RUNBACK系统包含的某一辅机故障,机组主要热工自动控制系统相互配合,将机组负荷快速安全降低到机组实际所能达到的最大数值上稳定运行的能力,本项试验确认机组涉及RB功能的软、硬件功能是否完善,为今后RB功能的长期投入提供依据。
机组RB功能试验时,主要参数波动范围若不危机机组安全和引起机组保护动作,即为合格。
2.系统概述、RB控制策略及品质指标2.1主机概述汽轮机为亚临界、中间再热、单轴三缸四排汽、冲动凝汽式,设计额定功率为600MW。
汽机采用高中压缸合缸结构,低压缸为双流反向布置。
从机头向发电机方向看为逆时针方向旋转。
本机共设有八段抽汽,分别供给三台高压加热器、一台除氧器、四台低压加热器。
本机设有二个高压自动主汽门和四个高压调节汽门,布置在机头前的运转层下方;二个左右对称布置的中压联合汽门。
汽轮发电机组轴系中除#1、2轴承采用可倾瓦式轴承外,其余均采用椭圆形轴承。
各轴承上瓦的X、Y向装有轴振测量装置,下瓦装有测温装置。
推力轴承位于高中压缸和低A缸之间的#2轴承座,采用倾斜平面式双推力盘结构。
高中压缸的膨胀死点位于#2轴承座,低A缸、低B缸的膨胀死点分别位于各自的中心附近。
死点处的横键限制汽缸的轴向位移。
同时,在前轴承箱及两个低压缸的纵向中心线前后设有纵向键,引导汽缸沿轴向自由膨胀而限制其横向跑偏。
汽机给水系统设计有2台50%BMCR容量的汽动变速给水泵和一台50%BMCR容量的电动调速给水泵作为备用。
小机设计有高低压两路汽源,并可采用辅汽冲转。
小机排汽至主机凝汽器。
凝汽器设计为双壳体、双背压、单流程,可在机组最大出力、VWO工况凝汽器循环冷却水的进水温度为33℃,出水温度小于43℃,额定背压10.13 kPa。
机组RB功能试验三措两案范本
机组RB功能试验三措两案范本1 系统概况公司_机组600MW亚临界参数燃煤发电机组。
锅炉为上海锅炉厂制造。
汽轮机为上海汽轮机厂制造的亚临界蒸汽参数、一次中间再热、单轴双缸双排汽汽轮机。
发电机由上海电机股份有限责任公司制造的600MW水氢氢冷却汽轮发电机。
机组热工控制为单元制,采用机、炉、电集中控制方式,机组热工控制设备为北京和利时MACSV-5型分散控制系统(DCS)和部分可编程控制器。
工程设计单位为西北电力设计院;工程施工单位为北京电力建设公司;上海调试所负责机组的分系统调试和整套启动调试。
和利时MACSV-5型分散控制系统包括以下系统及功能:闭环控制系统(MCS),炉膛安全管理系统(FSSS),汽机及锅炉侧顺序控制系统(SCS),数据采集处理监视系统(DAS),电气侧顺序控制系统(ECS)等。
机组DCS共由五台操作员站、一台工程师站、若干控制机柜及4台打印机组成。
2 试验目的保证控制系统测点及报警信号正确,设备可远方操作,相应反馈信号正确可靠,各系统保护及联锁安全、可靠,动作正常,投入运行,主要辅机跳闸后机组可以按照事先预定负荷及压力进行协调控制,保证机组的安全运行。
3 试验组织机构及分工3.1领导小组:组长:生产副总副组长:总工成员:专业管理人员职责:负责确认试验的可行性,审批试验方案和措施,对存在的风险进行评估,并采取相应的防范措施,在试验出现异常情况下有权命令停止试验。
3.2试验指挥组:组长:副三总师副组长:生技部、设备部经理成员:专业管理人员职责:下达试验步骤的操作命令,确定操作的正确性和安全性,在试验出现异常情况下有权命令停止试验。
3.3运行操作组:组长:发电部经理成员:专业管理人员职责:负责根据试验方案编写试验操作票、风险预控票,并进行落实,负责试验过程运行设备的各项操作及事故处理,安排运行水平较好的运行人员参加试验,尽可能减少RB、电泵大联锁失败时带来的损失,监督落实试验过程中设备的消缺情况,负责做好试验过程中各运行参数的记录。
1000MW机组脱硫系统增压风机跳闸RB控制技术
机 组 的快 速 减 负 荷 功能 ( R B) 目标 是 , 当机 组 重 要 辅 机 发 生
产 的水 氢氢 冷 自并 励 静 止 励 磁 发 电机 ; 脱 硫 系 统则 采用 石灰 石 自动 控 制 系统 将 机 组 负荷 快速 降低 到实 际所 能达 到 的 相 应 出 力 , 同时 维 持 机 组 主 要 参 数 在 允许 范 围 内 , 保 证 机 组 安 全 稳 定 。 现 代 大 型 火 电机 组 R B
过程一般通过 D C S 系统 实 现 ] 。 在R B试 验 中 , 要 求 机 组 过 程 参 数 不 超 过 跳 闸 值 ,同 时将 机 组 负 荷 安 全 过 渡 到 跳 闸辅 机 允许 的
石 膏 湿 法 烟 气 脱 硫 工 艺 , 每 台 机 组 设 置 一 套 烟 气 脱 硫 装 置
闫 超’ 朱亚清 林 蕾 ’ 李 滨 ’
( 1 广 东惠 州平 海发 电厂 有 限公 司 , 广 东 惠州 5 1 6 3 6 3 ; 2 广 东 电力科 学研 究 院 , 广东 广州 5 1 0 0 8 0 )
摘 要
1 0 0 0 MW 超超 临界 机 组 取 消脱 硫 烟 气 旁路 后 , 增 压 风机 跳 闸 会危 及机 组安 全运 行 。针 对 以上 问题 , 采 用 快 速 减 负荷 的 方法, 可 以提 高机 组 安 全 。提 出 当增 压 风 机 跳 闸触 发 R B时 , 送 风机 、 引风 机 预 置 一 定 开 度 的 控 制 策略 , 解 决 了增 压 风 机 跳 闸后 引发 引风 机 失速 的 问题 , 成 功 实现 了增 压 风机 R B功 能 。试 验 结 果 表 明 , 所提 出的控 制 策略 切 实 可行 , 对 同类 型机 组 实
rb试验方案(讨论稿)
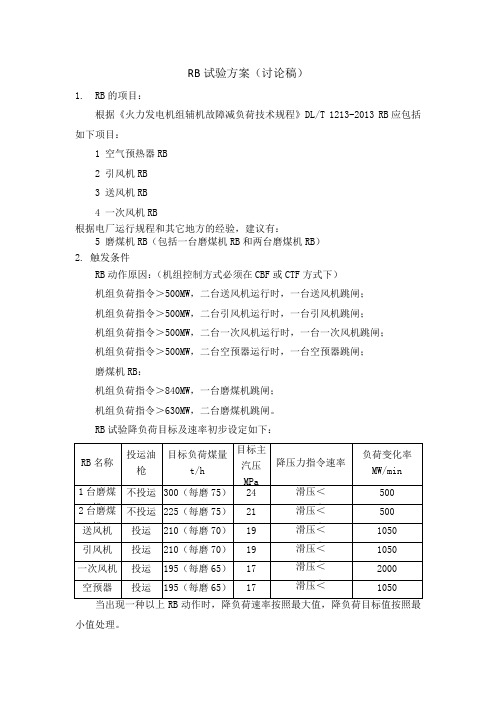
RB试验方案(讨论稿)1. RB的项目:根据《火力发电机组辅机故障减负荷技术规程》DL/T 1213-2013 RB应包括如下项目:1 空气预热器RB2 引风机RB3 送风机RB4 一次风机RB根据电厂运行规程和其它地方的经验,建议有:5 磨煤机RB(包括一台磨煤机RB和两台磨煤机RB)2.触发条件RB动作原因:(机组控制方式必须在CBF或CTF方式下)机组负荷指令>500MW,二台送风机运行时,一台送风机跳闸;机组负荷指令>500MW,二台引风机运行时,一台引风机跳闸;机组负荷指令>500MW,二台一次风机运行时,一台一次风机跳闸;机组负荷指令>500MW,二台空预器运行时,一台空预器跳闸;磨煤机RB:机组负荷指令>840MW,一台磨煤机跳闸;机组负荷指令>630MW,二台磨煤机跳闸。
RB试验降负荷目标及速率初步设定如下:小值处理。
以上根据数据来自《电厂运行规程》。
按以往一些工程的经验,目标负荷煤量的计算方法为:RB前的煤量/RB前的负荷×RB的目标负荷。
3.RB动作结果磨煤机RB动作时,机组主控方式自动切至 BI 方式。
锅炉主控 BID 指令自动下降,机组负荷快速下降。
空预器RB、引风机RB、送风机RB动作时,相关辅机联锁动作,停对应侧的送、引风机。
机组主控方式自动切至 BI 方式,DEH 自动切至初压模式。
BID 指令自动下降到 50%,机组负荷快速下降。
助燃油枪自动投入运行。
(初步定为投最下层油枪,投入油枪的速度是在油压能够保持稳定,不影响油枪燃烧的情况下,尽可能快的投入各油枪,各油枪的投运时间间隔可能小于正常层启动程控的时间间隔,)磨煤机以从上到下的次序跳闸,保留三台磨运行。
一次风机RB动作时,机组主控方式自动切至 BI 方式,DEH 自动切至初压模式。
BID 指令自动下降到 50%,机组负荷快速下降。
助燃油枪自动投入运行。
磨煤机以从下到上的次序跳闸,保留三台磨运行。
当机组负荷降至不大于RB目标负荷且基本稳定后,主蒸汽压力、主蒸汽温度等主要参数基本稳定,则RB复位。
RB试验方案全解
RB试验方案全解国投宣城发电有限责任公司1号机组RUNBACK性能试验方案1系统概况国投宣城发电有限责任公司1号机组(600MW)锅炉为超临界压力、循环泵式启动系统、前后墙对冲低NOX轴向旋流燃烧器、一次中间再热、单炉膛平衡通风、固态排渣、全钢构架的变压本生直流炉。
汽轮机采用哈尔滨汽轮机厂有限责任公司生产的超临界、一次中间再热、冲动式、单轴、三缸四排汽、凝汽式汽轮机,型号为:N600-24.2/566/566。
发电机为哈尔滨电机厂有限责任公司生产的水氢氢冷却、静态励磁汽轮发电机。
分散控制系统采用西门子电站自动化有限公司的T3000分散控制系统。
其主要包括:数据采集系统(DAS)、模拟量控制系统(MCS)、顺序控制系统(SCS)、旁路系统(BPS)、炉膛安全监视系统(FSSS)。
机组控制系统设计有RB功能。
2试验目的在机组正常运行过程中如有一台重要辅机故障突然跳闸,机组带负荷能力下降,机组需操作的对象和影响的参数较多,操作人员往往会难以应对,同时操作过程中有可能过调或欠调,使参数进一步恶化而导致MFT事故发生,造成机组非计划停运,势必给电网的稳定运行造成冲击。
为大大减小网内大机组由于单台重要辅机跳闸而造成机组跳闸的概率,确保电网安全稳定运行,所有涉网机组须具备RB功能(根据机组类型及设计而定)并完成现场试验。
现场试验采用辅机实际跳闸动作检验RB功能逻辑及其降负荷动态过程的稳定性,同时验证主要参数自动调节性能、主保护及辅机联锁保护动作的正确性;通过试验整定RB功能动态参数,确定了不同辅机故障跳闸时运行监控方式及操作的要点。
使RB控制方案达到在自动方式下自动处理事故的功能。
3试验依据(1)、《安徽电网发电企业调度运行管理办法》皖经电力[2008]114号(2)、《火力发电厂热工自动化系统检修运行维护规程》DL/T 774-2004 4试验条件(1)、RB试验前,机炉协调控制系统应投入自动运行;协调控制系统增减负荷、保护闭锁试验正确;RB信号产生静态试验正确;RB信号与SCS、BMS、DEH系统联锁静态试验正确,就地设备可控;机组各主要保护动作正确并正常投入。
热工自动调节系统扰动试验方案
.自动调节系统扰动试验方案RB试验方案1、试验目的:1.1 检验机组在辅机发生故障跳闸锅炉出力低于给定功率时,自动控制系统将机组负荷快速降低到实际所能达到的相应出力的能力,是对机组自动控制系统性能和功能的考验。
1.2验证控制回路的安全可靠性。
2、试验条件:2.1一次设备工作可靠。
2.2燃料自动、主汽温自动、再热汽温自动、炉膛负压自动、送风机自动、一次风压自动、给水自动、凝汽器水位自动均已投入。
2.3机组运行稳定,负荷在额定负荷附近可做15%负荷扰动。
2.4机组功率控制方式应为协调方式。
2.5锅炉炉膛安全监控系统(FSSS)已可靠投入运行。
3 、试验步骤:3.1送风机RUNBACK试验:●模拟量控制系统投入自动。
●待负荷及汽压稳定,手动跳闸一台送风机,报警显示送风机跳闸。
●最上三层磨煤机自动跳闸,负荷指令迅速减至60%负荷。
●主汽压下降及调门关小,机组负荷将自动降至需求负荷,观察机组运行情况,记录各系统曲线。
●待机组运行稳定后,重新启动跳闸送风机及磨煤机,将负荷缓慢回升至试验前位置。
●试验中以下参数应加强监视:1)运行送、引风机电流;2)炉膛压力;3)锅炉燃烧情况;4)锅炉汽包水位;5)锅炉主、再热蒸汽温度;6)锅炉空预器运行情况;●注意事项:1)注意监视锅炉燃烧情况,如燃烧迅速恶化应手动MFT。
2)监视汽包水位及蒸汽温度,如有必要可手动干预,以机组能维持运行为目的。
3)如运行送、引风机电流过大,可进一步手动降低目标负荷,直至降至安全电流。
4)如主汽压力无法维持,可进一步手动降低目标负荷。
3.2 给水泵RUNBACK试验:●5号机组2台给水泵并列自动运行。
●将机组投入协调方式运行。
●两台给水泵并列自动运行,将备用给水泵联锁解除。
●待负荷及汽压稳定,手动跳闸一台给水泵。
●最上三层磨煤机自动跳闸,备用给水泵不启动,汽包水位迅速下降,负荷指令迅速减至50%负荷。
(此过程中,若汽包水位降至-150mm,则操作员手动增加液耦指令,参与补水,以防止因汽包水位低低导致锅炉MFT)。
660MW超超临界机组RB试验控制细解
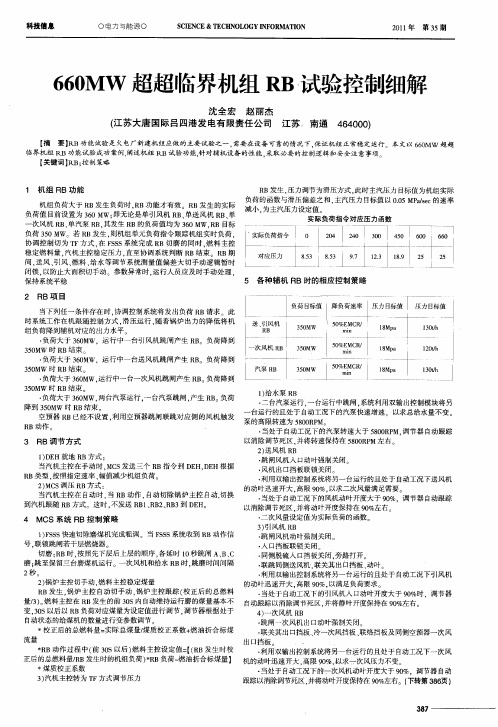
1 机 组 R 功 能 B
2 R B项 目 当下列任一条件存在 时 . 协调控制系统将发 出负荷 R B请求 此 时系统工作在机 跟随控制方 式 . 滑压运行 . 随着锅 炉出力的降低将 机 组负荷降到辅机对应 的出力水平。 负荷大于 3 0 W.运行 中一 台引风机跳闸产生 R 负荷 降到 6M B 30 5 MW 时 R B结束 负荷大于 3 0 6 MW.运行 中一 台送风机跳闸产生 R 负荷 降到 B 30 W 时 R 5M B结束 。 负荷大于 30 W. 6 M 运行中一台一 次风机跳 闸产 生 R 负荷 降到 B 30 5 MW 时 R B结束。 1 给水 泵 RB ) 负荷 大于 3 0 W , 6 M 两台汽泵 运行 , 台汽泵跳 闸, 一 产生 R 。 B 负荷 二 台汽泵运行 . 台运行 中跳闸 . 一 系统利用双输出控制模块将另 降到 3 0 5 MW 时 R B结束 台运行 的且处于 自 动工况下的汽泵快速增速 .以求总给水量不变 空 预器 R B已经不设置 . 利用 空预器跳闸联跳对应侧 的风机触发 泵的高限转速为 5 0 R M 80P RB动作 当处 于 自动工况下的汽泵转速大 于 5 0 R M. 8 0 P 调节器 自动跟踪 以消 除调节死 区. 并将转速保持在 5 0 R M左右 80 P 3 R B调 节 方 式
2秒 。
2 锅炉主控切手动 . ) 燃料主控稳定煤量 R B发生 . 炉主控 自动切手动 , 炉主控跟踪 ( 正后 的总燃 料 锅 锅 校 量/ ) 燃料主控在 R 3 B发生的前 3 S 自动维持运行磨的煤 量基本 不 0内 变. S 3 以后 以 R 0 B负荷对应煤量为设定值进 行调节 . 调节器根据处 于 自动状 态的给煤机的数量进 行变参 数调节 跳闸一次风机 出口动 叶强制关闭 校正后的总燃料量 = 实际总煤量艨 质校正 系数+ 油折合标煤 燃 联关其 出 口 挡板 、 冷一次风挡板 、 联络挡 板及同侧空预器一次风 流量 出 口挡 板 . * B动作过程 中( 3S以后 ) R 前 0 燃料主控设 定值= ( B 生时校 【R 发 利用 双输 出控制系统将另一台运行的且处 于 自动工况 下一次风 正后 的总燃料量/B发生时的机组负荷)R R B负荷一 燃油折合标煤量 】 机的动 叶迅速开大 . 高限 9 %, 求一次风压力不变。 0 煤质校正 系数 当处 于自动工况下的・次风机动叶开度大于 9 %. 0 调节器 自动 3 汽机主控转为 T ) F方式调节压力 跟踪以消除调节死区, 动叶开度保持在 9% 并将 0 左右 。( 下转第 3 6 8 页)
超超临界机组RB控制策略优化研究与试验分析

第28卷 第3期2021年3月仪器仪表用户INSTRUMENTATIONVol.282021 No.3超超临界机组RB控制策略优化研究与试验分析李 鲁1,岳 良1,耿学军2,张 威3(1.国网湖北省电力有限公司 电力科学研究院,武汉 430077;2.黄冈大别山发电有限责任公司,湖北 黄冈 438300;3.湖北方源东力电力科学研究有限公司,武汉 430077)摘 要:以大别山电厂二期扩建工程某新建660MW 超超临界机组为研究对象,结合该机组实际特点,介绍了设置的几种RB 功能的设计原则和初始控制策略。
为了提高RB 动作可靠性和动作后的调节性能,提出对触发控制策略、联锁动作控制策略和重要参数调节控制策略进行优化的方法。
优化后进行了所有RB 工况的动态试验,结果表明:机组联锁保护动作均正确,试验过程中主蒸汽温度最多下降33.4℃,再热蒸汽温度最多下降45.7℃,炉膛压力最多降至-1484.6Pa,其余主要参数过渡平稳,优化后的控制策略能够很好地满足RB 功能的实际要求。
关键词:超超临界机组;RB 功能;控制策略;优化;动态试验中图分类号:TM621 文献标志码:AOptimization Research and Test Analysis for the UrtraSupercritical Unit RB Control StrategyLi Lu 1,Yue Liang 1,Geng Xuejun 2,Zhang Wei 3(1.Electric Power Research Institute, State Grid Hubei Electric Power Co.,Ltd.,Wuhan,430077,China;2.Huanggang Dabie Mountain Power Generation Co.,Ltd., Hubei,Huanggang,438300,China;3.Hubei Fangyuan Dongli Electric Power Research Co.,Ltd., Wuhan,430077,China)Abstract:It takes a 660MW supercritical unit of the second phase expansion project of Dabie Mountain Power Plant as the re-search object. It combines the characteristics of the unit, explain the design principle and initial control strategy of the designed RB functions , In order to improve the reliability of RB action and adjustment performance after action. Proposed a method of triggering control strategies, control strategies and action interlock important parameters to optimize the control strategy adjustment. dynamic tests of all RB working conditions are carried out, the results shows that: the unit’s all interlock protect actions are correct ,dur-ing these tests main steam temperature drops at most 33.4℃, reheat steam temperature drops at most 45.7℃, furnace negative pressure drops to -1484.6Pa at most, the transition of other main paremeters is smooth, the optimized control strategy can be well satisfied with actual requirements of the RB function.Key words:urtra supercritical unit;RB function;control strategy;optimization;dynamic testDOI:10.3969/j.issn.1671-1041.2021.03.022文章编号:1671-1041(2021)03-0087-06收稿日期:2020-12-15作者简介:李鲁(1989-),男,湖北荆州人,硕士,高级工程师, 研究方向:发电厂热工自动控制。
300MW火电厂机组RB试验措施
十里泉电厂#6机组RB试验说明RB是指机组各种主要辅机故障时,协调控制系统使机组自动减至与运行辅机出力相适应或保持锅炉最低稳燃的目标负荷,同时保证机组的安全、经济运行。
1.RB试验1.1RB试验必须具备的条件1.1.1机组主要辅机运行正常1.1.2机组的主要保护如:FSSS、汽机保护、发电机保护、水位保护等要投入运行,且动作可靠。
1.1.3相关的系统和联锁要投入运行,如旁路控制系统、辅汽至除氧器电动门。
1.1.4各控制子系统和机组协调控制系统要运行在自动方式,且经过严格的负荷摆动试验,调节质量满足要求。
1.1.5DEH(汽轮机数字电液控制系统)电调运行具备良好的负荷响应特性。
1.2试验数据和设备对于主要的参数如主蒸汽压力、机组负荷、炉膛压力、汽包水位、调门开度等要有数据记录,为试验后的数据分析作准备。
1.3试验方法1.3.1我厂此次设臵送风机RB、引风机RB、给水泵RB,RB允许负荷均为200 MW,各种RB的目标负荷为190MW。
1.3.2根据各种RB的特性确定和运行人员的经验确定RB的速率,DEH降负荷的速率为150MW/分钟。
1.3.3进行实际的RB试验1.3.3.1检查机组的主辅机运行正常,所有的主保护运行正常。
1.3.3.2各控制子系统和协调控制系统运行正常1.3.3.3制作条件进行RB试验。
2.几点说明2.1机组的目标负荷确定,除考虑对应设备的带负荷能力外,还要考虑机组的最低稳燃负荷(暂定为180 MW)、环境条件的变化来确定整个机组的最大可能出力。
2.2每种工况RB根据运行经验确定在锅炉侧切除火嘴的速率为2秒钟一个。
2.3给水泵RB的发出条件:考虑电泵联动不成功,运行人员手动开启电泵,操作电泵抢水的实际情况,暂按汽泵跳闸后,电泵未运行延时10秒发RB信号。
2.4在RUNBACK方式下,将一级减温,二级减温,再热事故喷水调门自动关闭,在关闭的同时产生10秒的闭锁脉冲,10秒钟内运行人员无法操作。
RB试验、MFT、AVR、FCR
RB试验机组RB功能试验1.RB试验的目的RB试验的主要目的是检验火电机组在辅机发生故障跳闸锅炉出力低于给定功率时,自动控制系统将机组负荷快速降低到实际所能达到的相应出力的能力,是对机组自动控制系统性能和功能的考验。
2 机组RB试验应具备的条件2.1 模拟量控制系统,如机组功率控制系统、燃烧控制系统、给水控制系统、温度控制系统和其他辅助控制系统已正常投用,并经过相应的定值扰动和负荷变动试验,调节品质达到《验评标准》的要求。
2.2 机组功率控制方式应为协调方式,其他几种运行方式(如机跟随、炉跟随)也已投运过,并已进行过负荷变动试验。
运行方式的切换已经过考验,能手动或自动进行无扰切换。
采用滑压运行的机组还需检查滑压运行控制功能。
2.3 锅炉炉膛安全监控系统(FSSS)已经正式投入运行,RB信号至FSSS 的联系正常,逻辑关系正确。
2.4 机组保护系统正常投入。
定压运行指汽轮机在不同工况运行时,依靠改变调节汽门的开度来改变机组的功率,而汽轮机前的新汽压力则是维持不变的,新汽温度也是维持不变的。
滑压运行指汽轮机在不同工况运行时,不仅主汽门是全开的,而且调节汽门也是全开的,这时机组功率的变动是靠汽轮机前主蒸汽压力的改变来实现的。
也就是说,主蒸汽压力应随机组工况的变动而变动,但此时主蒸汽温度仍保持不变。
更具体的说,机组在额定功率时按额定压力运行;在低负荷时则以某一低于额定数值的压力运行,而在工况变动范围内,汽温并不变化,仍保持额定值。
a)减少新汽的节流损失,改善汽轮机高压端蒸汽流动的状态,汽轮机内效率高于定压运行时的。
(负荷越低,这种效益越大)b)由于滑压运行时汽机高排温度近乎不变并略有提高,因此锅炉在低负荷时均能维持额定再热汽温。
这样,当负低于额定负荷70%时,滑压运行的经济性要比定压运行时的有显著改善。
c)由于滑压运行可以实现各种负荷下主、再汽温基本不变,汽机全开汽阀,因此改善了汽轮机部件的热应和热变形,大大提高了机组负荷变化速度。
RB功能试验措施
RB功能试验措施1 试验目的在实际运行工况下验证机组的RB功能,检验机组在RB工况下稳定运行的能力,特别是检验CCS、FSSS、DEH、MEH等热工系统在RB发生时的自动调节与保护能力是否能够保证整个机组继续安全、稳定地运行。
2 编制的依据2.1 《火电工程启动调试工作规定》(电力工业部建设协调司1996.5);2.2 《火电发电建设工程启动试运及验收规程》(DL/T-5437-2009);2.3 《火电施工质量检验及评定标准》热工仪表及控制装置篇(1998年版);2.4 《火电工程调整试运质量检验及评定标准》(电力部1996);2.5 《山东电网机(厂)网协调技术要求(试行)》(调技[2007]8号文);2.6 《山东电网机(厂)网协调管理规定》3 试验组织为保证试验顺利进行,成立由生产管理、调度、设备、运行、热工、DCS厂家、山东电研院等有关部门的领导和专业技术人员参加的试验小组,负责试验的组织、分工、协调工作,以保证本次试验工作的圆满完成。
(1)试验由当值值长统一指挥;(2)当值运行人员负责操作,当值机组长应指定专门人员负责试验的操作、监护、数据记录和就地巡视等工作;热工人员作好试验曲线的历史趋势;(3)试验时各有关人员应到场,人员到齐后进行试验工作;(4)要准备好充足的通讯联络工具,工作人员会使用;(5)参加试验的人员应熟悉本措施。
4 试验条件4.1 CCS、FSSS的单系统RB冷态试验及两个系统联调时的RB冷态试验均已做过且成功;热工其他系统及机、炉、电等相关专业的冷、热态试验都已完成且试验数据完备。
4.2 在机组带满负荷的情况下,CCS的下列自动调节系统已经运行12 小时以上:(1)协调控制系统。
机组的协调控制系统能正常运行,且TF(汽机跟随)方式要正常工作;(2)一次风压控制系统;(3)除氧器水位控制系统;(4)炉膛负压控制系统;(5)送风控制系统;(6)主燃料控制系统;(7)给水控制系统;(8)过热器温度控制系统;(9)再热器温度控制系统;(10)热井水位控制系统;(11)汽泵最小流量再循环控制系统。
320MW机组RB性能试验

320MW机组 RB 性能试验1、概况秦皇岛秦热发电有限责任公司采用引进ALSTOM公司技术由东方锅炉厂生产的循环流化床锅炉。
汽轮发电机为上海汽轮机有限公司300MW等级机组采暖抽汽式汽轮机,亚临界蒸汽参数、一次再热、单轴双排汽采暖抽汽凝汽式机组。
2013年5月份5号机组完成增容改造,机组容量变更为320MW。
热工控制系统为上海GE新华控制公司的XDPS-400+分散控制系统。
该系统按被控对象分主要分为BSCS(锅炉顺控系统)、TSCS(汽机顺控系统)、MCS(模拟量控制系统)、FSSS(锅炉炉膛安全监控系统)、ECS(电气顺控系统)、DAS(数据采集系统)、BPS(旁路控制系统)、MEH(给水泵汽轮机电液调节系统)、DEH(汽轮机电液调节系统)等控制系统。
2、试验目的及项目2.1检查机组主要辅机发生故障时,机组快速降负荷,维持锅炉允许出力的能力。
2.2检查机组RB(RUN BACK)功能及各自动调节系统的控制能力。
3、试验过程介绍设计RUNBACK逻辑的主要目的是当发生部分主要辅机故障跳闸时,协调控制系统将机组负荷快速降低到实际所能达到的相应出力,并能控制机组在允许参数范围内继续运行称为RUNBACK(辅机故障减负荷,简称 RB)。
RB试验的目的是检验机组和控制系统在故障下的适应能力,是对机组故障下运行能力及控制系统性能和功能的检验,RB功能的实现为机组在高度自动化方式下运行提供了安全保障。
本次试验调试了以下几项RUNBACK功能:•o送风机RBo引风机RBo给水RB3.1引风机RUNBACK3.1.1试验前机组运行状况:4月12日10点21分进行了引风机RUNBACK试验。
试验前机组的工况如下:机组负荷:270.09MW控制方式:协调模式(CCBF)主汽压力:13.88Mpa炉膛出口压力:-0.01Pa保护用分离器出口压力:-1.6KPa给煤量:205t/h四台称重给煤机、刮板给煤机运行,刮板给煤机随动投入,两台二次风机、两台吸风机、两台一次风机、两台汽动给水泵和空预器运行。
大别山电厂2×600MWRB试验方案

措施名称:湖北大别山电厂2×600MW超临界机组工程一号机组RUNBACK试验方案措施编号:HD1CR0815出措施日期:2008年03月保管年限:长期密级:一般试验负责人:白建锋试验地点:湖北大别山电厂参加试验人员:曾有琪、王鑫、曹阳、包成强、童松枫等参加试验单位:中国电力黄冈大别山发电有限责任公司、中电投电力工程有限公司大别山项目部、中国电力神头检修有限责任公司大别山项目部、中国电力神头运行有限责任公司大别山项目部、广东天安工程监理有限公司、西北电力建设调试施工研究所、湖北电力建设第一工程公司、中南电力设计院等试验日期:2008年03月-2008年06月打印份数:20份批准:审核:编写:目录1. 编制目的2. 编制依据3. 调试质量目标4. 职责分工5. 安全注意事项6. 系统及功能简介7. 调试范围8. 调试前应具备的条件9. 调试工作程序10. 试验记录参数11. 调试步骤12.RUNBACK试验结果评估13.附录附录1.调试质量控制点1.试验目的1.1当机组主要辅机故障跳闸造成机组实发功率受到限制时(协调控制系统在自动状态),为适应设备出力,协调控制系统强制将机组负荷减到尚在运行的辅机所能承受的负荷目标值。
协调控制系统的该功能称为辅机故障减负荷(RUNBACK),简称RB。
检验该功能的试验简称RB试验。
1.2通过RB试验检验其控制功能、逻辑、时序等设计的合理性,当RB发生时,能否在运行人员不直接干预的情况下完成自动减负荷,满足机组稳定运行的要求。
1.3考验机组整体的适应能力,在现有设计的控制模式下(联跳其他辅机、减粉、燃油投入、等离子投入等),当一台主要辅机跳闸时机组能否平稳地从大负荷过渡到低负荷状态,保证机组安全运行。
1.4通过RB试验取得机组正常运行时不易取得的工况数据,对机组安全运行具有指导意义。
1.5机组RB试验时,参数波动范围不危及机组安全和不引起机组保护动作跳闸,即为合格。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 协调控制系统输 出至FSSS跳磨或 给粉机的控制逻 辑正确,数字量 输出回路能正确 动作;
4 协调控制系统在 RB发生后能够自 动切换到TF方式 运行;
5 RB时,主汽压采 用的定压/滑压 方式符合设计要 求,一般应切换 到滑压方式运行;
6 滑压运行方式时, 滑压速率参数设 定制策略主要由模拟量控制系统(MCS)和燃烧器管理系统(BMS)共同实现
RB功能模拟 试验
在机组停运的情况下,按 设计的功能依次模拟RB 产生的条件,进行RB功 能模拟试验。试验中,主 要应检查以下一些内容:
1 所有的RB数字量 输入回路能够正 确动作;
2 负荷运算回路、 负荷指令变化速 率等RB控制参数 已正确设定;
RB控制系统试验
RB控制系统
当发生部分主要辅机故障跳闸,使锅炉最大出力低于给定功率时,协调控制系统将机组 负荷快速降低到实际所能达到的相应出力,并控制机组在允许参数范围内继续运行,该 过程称为RB。
RB试验的目的是检验机组和控制系统在故障下的适应能力,RB功能的实现为机组在高 度自动化运行方式下提供了安全保障。
RB功能动态试验
● 在进行RB动态试验之前,应检查具备以下条件: ● 1)协调控制系统及控制子系统已正常投用,并完成相应的定值扰动和负荷摆动试验,调节品质合格; ● 2)协调控制系统在TF方式下定值扰动试验合格,调节品质符合要求。参考指标:0.6~0.8MPa定值扰 动下,过渡过程衰减率Ψ=0.7~0.9、稳定时间<6min; ● 3)RB功能模拟试验已完成,结果满足要求; ● 4)机组保护系统已正常投入 。 ● 在进行正式的RB动态试验之前,一般应进行预备性试验,以确认协调控制系统在RB工况下能正确进行 控制,并根据预备性试验的结果相关参数进行适当调整。 ● RB正式试验一般在90%Pe以上负荷工况下进行,以考核机组和协调控制系统在RB工况下控制能力。 动态试验应按设计的RB功能分项进行,记录各被调量的动态曲线。 ● RB试验的品质指标:机组RB试验时,参数波动范围不危及机组安全和不引起机组保护动作跳闸,即为 合格