一种多传感器信息融合电路故障诊断方法
多通道信息融合技术在故障诊断中的应用
全 面准确 的认识 。信息融 合技术 可 以弥补 单 号源
系统 的不 足 ,获得 对于 目标 更精确 的信息 。滚动 轴 承是旋转 机械 中应 用最广 泛的零部 件之一 ,其工作
的 好 坏 对 机 器 的 工 作 状 态 有 很 大 影 响 。 因 此 ,对 滚
作为一 门新兴 的学科 ,信 息融合技 术能有 效地 利用 多个传感 器的信息 ,对 同一 目标不 同侧 面的信
息进行 有效 的支配和使用 ,把多个 传感器 获得 的信
号按 照某 种特定 的方式进 行处理 ,以获得 对 目标 更
与输 出的映射 。支持 向量机 主要用 来解决 分类 和拟
合问题 。
第2卷 8
第3 期
V01 No3 . 28 .
文章 编 号 :0 7 I 8(o 0 — 0 2 0 10 ~ o2 l 3 0 5 — 6 1 0
多通道信息融合技术在 故 障诊 断 中的应用
杨 永 生
( 西省 行 政 学 院 计 算机 系 , 陕 西 西安 陕 706 ) 10 8
个传 感器的信号 ,以达到充分利用传感 器信息的 目的。通过一个轴承故 障诊 断的例子 ,证 实本模型具有 实现 a 闻单、准确 率高的优点 ,在轴 承故 障诊 断中具有一定的优越性 a - -
关 键 词 : 支持 向 量机 (V ;信 息融 合 ;故 障诊 断 S M) 中 图分 类 号 :T 3 1 P 9 文 献 标识 码 :A
DOI: 1 .7 8 0MEI2 2 0 .0 2 03 8 / 01 8 30 5 l
Re e rh o a ig F utDig o i a e n If r t n F so s a c n Be r a l a n ss b s d o n o ma i u in n o
一种改进的DS多传感器信息融合故障诊断方法

中。但由于其不能很好 的处理冲突项 , 应用 中受到限制 。为解决此问题 , 在 通过建立传感器间支持信任 矩阵, 重新赋予加权系 数, 经过仿真表 明此方法很好 的解决 了 D S理论 中的冲突问题 , 提高 了故障诊断正确率。
关键 词 D S证据 推 理 故 障诊 断 信 息 融合
通信技术
一
种改进 的 D S多传 感器信 息 融 院导 弹 工程 系 , 家 庄 000 ) 军 石 5 0 3
摘
要
D s证据 推 理 理 论 由于其 能 很 好 融 合 多传 感 器 数 据和 区 分 不 确 定 与 不知 道 的 问 题 , 而 被广 泛 应 用 于 故 障 诊 断 过 程 因
其中:
k=ij:∑j 6m ( z 。 8 ̄ B) ( m ) nc
k为 冲突因子 , 表示 证据 的冲 突程度 , k 于 1 , 当 等 时
说 明证据 完全 冲突 , 不能 组合 。
13 D . S存在 的 问题
一
要考 虑每个 传感 器 之 间 的距 离 , 即被 其 他 传 感器 支
中图法分类号 T 99 6 ; N 1.4
文献标志码
多传感器信息融合技术是对来 自不 同传感器 ( 信
或 故障状态 作 出准确 诊断越 发重要 。随着 各种专 业 传感 器 的出现和 D S理论 的完善发展 , 利用多传 感器 信 息融合 技术尽 可 能快 地确 定 故 障部 位 , 为解 决 成
D S证据理论 是 对 传统 的 贝叶斯 理 论 的重要 推
广, 他用 信 任 区 间 代 替 概 率 , 集 合 表 示 命 题 ( 用 事 件 )用 D m s r 合规 则 代替 贝 叶斯 公式 。D , e pt 组 e s理
基于多传感器信息融合的故障诊断方法

基于多传感器信息融合的故障诊断方法孙国玺;雷高伟;张清华;王磊;邵龙秋【摘要】为了获得更多的故障信息,全面了解故障特征,采用多个不同的传感器共同监测是一种有效的方法途径.而实际现场工业设备运行环境非常复杂,使得传感器采集到的信息包含很多来自自然环境或人为的干扰噪声,导致采集到的故障信息冲突.针对这一问题,提出了一种基于多传感器信息融合的故障诊断方法.首先求得各证据之间的证据距离,根据证据距离值的大小再修改证据,然后利用D-S证据理论进行信息融合,提高了诊断的可靠性和准确度.实验验证了该方法切实可行.【期刊名称】《上海应用技术学院学报(自然科学版)》【年(卷),期】2016(016)001【总页数】4页(P22-25)【关键词】信息融合;证据理论;多传感器;无量纲指标【作者】孙国玺;雷高伟;张清华;王磊;邵龙秋【作者单位】广东石油化工学院广东省石化装备故障诊断重点实验室,广东茂名525000;广东石油化工学院广东省石化装备故障诊断重点实验室,广东茂名525000;广东石油化工学院广东省石化装备故障诊断重点实验室,广东茂名 525000;广东石油化工学院广东省石化装备故障诊断重点实验室,广东茂名 525000;广东石油化工学院广东省石化装备故障诊断重点实验室,广东茂名 525000【正文语种】中文【中图分类】TP277随着工业技术的飞速发展,各种精密复杂的大型机械设备不断涌出,对设备运行的可靠性和安全性提出了更高的要求[1].特别对一些重要领域,如航空航天、石油化工、冶金、采矿等中的重要大型旋转机械设备,是否能安全稳定的运行直接关系到生产能否顺利进行.为了及时发现故障,避免重大事故发生以及缩短检修时间,把经济损失降到最低,必须大力开展旋转机械故障诊断的研究.由于现代工业中的旋转机械设备愈来愈趋向大型化、复杂化,利用单一的传感器很难获取全面、有效的振动信息,从而正确检测设备的实际运行状态.因此,目前大多旋转机械设备的故障检测都采用多个不同的传感器同时检测[2],以采集到故障的全部特征信息.但是一般情况下,设备所处的工作环境都异常恶劣复杂,导致传感器采集到的故障信息中掺杂有大量的来自自然环境或人为的干扰噪声,造成各个传感器之间的故障信息相互矛盾,趋向不同的故障类型.对于证据之间存在的高冲突,利用传统的D-S证据理论融合得出的结果往往有悖于实际情况[3].针对这一问题,目前解决的途径主要有2条:①对组合规则进行修改,认为产生融合结果不合理是归一化处理导致的[4-6];②对证据体进行修改,认为证据体的不准确是导致组合结果出现不合理情况的原因,通常会对证据体采用加权再处理[7].本文首先在获得判断故障类型的证据之后,先求出各个证据体之间的证据距离,然后依次构造出证据的置信度作为证据加权系数对证据进行再处理,最后利用D-S证据理论组合规则进行组合.在证据理论中首先定义了一个命题集Ω,称为识别框架(Frame of Discernment),其中所包含的元素个数取决于对问题的认识水平.识别框架中包含了所能认识到的该问题的所有可能的答案,可表示为定义1 设Ω为识别框架,2Ω为Ω上的幂集,若满足则称m为框架Ω基本概率分配;∀A⊂Ω,m(A)称为A的基本可信数,它反映了对A本身的信度大小.定义2 设Ω为识别框架,m为基本概率分配函数,定义函数满足:则称函数Bel为识别框架Ω上的信度函数.它表示证据对命题A为真的信任程度,是信任程度的下限估计.定义3 设Ω为识别框架,m为基本概率分配函数,若函数满足则称函数Pl为识别框架Ω上的似真度函数.它表示证据对命题A不为假的信任程度,是信任程度的上限估计.设m1、m2同一识别框架下的两个基本概率分配函数,则Dempster组合规则为:式中m1(B)m2(C)为分配给冲突证据的基本信任分配函数值,反映了证据间的冲突程度.由于传统证据理论存在缺陷,在证据激烈冲突的情况下,其融合结果会有悖于常理.将其与加权思想相结合[8-9],弱化证据间的冲突度,可以有效地解决高冲突证据的合成效果.对基本概率分配函数进行加权处理.设证据加权系数,∀A⊂Ω,则函数为Ω上的加权概率分配函数.加权系数体现了证据对各真子集的识别具有不同的可靠性和权威性.∀A⊂Ω,Wm(A)称为A的加权概率分配.由于证据体趋向不同的方向,即所支持的目标不同,它们之间存在着差异,而证据距离即用来度量2个证据体之间的差异性的程度,先将各证据体转化为证据向量,然后再计算证据向量之间的距离[10].设m1、m2是同一个辨识框架Ω中的2个基本概率分配,辨识框架Ω中含有n个完备且相互独立的元素,则m1、m2之间的证据距离可表示为还可表示为若2个证据体mi与mj之间的距离可用式(8)表示,并表示为,则2个证据体之间的相互支持度可表示为证据体mi和mj的相互支持度为其证据距离的倒数,如果2个证据体之间的距离大,则相互支持度较低;反之,相互支持度较高.为了使得高存在冲突的证据之间的融合结果更加符合实际情况,在融合之前需要对证据体进行处理.2个证据体之间的证据距离的大小反映了证据体的差异程度.如果一个证据体与其他所有的证据体之间的证据距离都很小,则说明其与其他的证据体差异性很小,即其被其他的证据所支持,表明该证据体的可信度较高,对融合的结果影响较大,其加权系数越大;同理,如果一个证据体不被其他证据所支持,则其可信度就很低,加权系数越小.加权系数以证据的相互支持度为基础,其值是某个证据体与其他所有证据体的相互支持度之和与所有证据体的相互支持度总和之比,具体公式为实验全过程在广东省石化装备故障诊断重点实验室的“HZ-1旋转机组多故障诊断实验平台”上完成.该实验平台可模拟产生多种不同的故障,主要有裂纹轴、弯轴、偏心轴、不对中轴以及轴承外裂、轴承内裂、轴承缺滚珠和轴承滚珠磨损,还可模拟轴故障和轴承故障的并发故障.实验机组组成如图1所示,其参数如表1所示.整套实验机组共分为4个部分:实验轴(包含正常轴和故障轴,其中故障轴有弯轴、偏心轴、裂轴和不对中轴)、齿轮箱(分为正常和故障齿轮箱,其中故障齿轮箱含有齿断、齿裂以及齿磨损)、轴承座(包括正常和故障轴承座,其中故障轴承座分为滚珠磨损、滚珠缺少、内圈磨损等)、负载(含有风机、水泵、磁粉制动器),如图2所示.设G1={裂轴},G2={偏心轴},G3={轴不对中},辨识框架Ω={G1,G2,G3}.本次实验真实故障类型为裂轴.首先利用EMT390进行故障振动信息采集,传感器分别采用加速度、速度和位移3种振动传感器.每种传感器分别采集100组振动数据,把出现某种故障的频率作为该故障的基本概率分配,得如下基本概率分配:加速度传感器速度传感器m2(G1)=0.51, m2(G2)=0.06位移传感器m3(G1)=0.32, m3(G2)=0.43由式(8)、(10)和(11)计算得:证据距离相互支持度加权系数加权之后的基本概率分配:加速度传感器速度传感器m2(G1)=0.40, m2(G2)=0.05位移传感器m3(G1)=0.14, m3(G2)=0.18融合之后的结果在对证据的处理过程中,考虑了证据之间的关联性,计算出两两证据体之间的证据距离,并由此定义了证据体的相互支持度,即每个证据体被其他证据体所支持的程度.根据每个证据被支持程度的大小,对每个证据体再乘以一个系数进行处理,使得融合的结果更加符合实际情况.该实验依托于“HZ-1旋转机组多故障诊断实验平台”,利用多种传感器进行故障信息采集,经过对数据分析、计算,给出了实验结果.实验利用多种传感器进行故障信息采集,有利于获得更加全面的故障信息,对故障诊断结果的判定有很大的帮助.将每个传感器获得故障信息作为一条证据体,考虑它们之间的关联性,并以此对各证据体进行加权处理,提高了诊断的正确率,使得融合的结果更加符合实际情况.本文只介绍了单一故障的诊断方法,对于多重并发故障诊断方法还需要进一步的研究.。
多传感器信息融合在电机故障诊断中的应用

噪声与振动控制
第5期
文章编号:1006-1355(2012)05-0164-04
多传感器信息融合在电机故障诊断中的应用
程加堂自 661199 )
摘 要:为了提高电机故障诊断的准确性,引入一种多传感器信息融合的诊断方法。将多个传感器所采集的转子
范围 [τmin,τmax] ,超过这个范围的值被限制为信息量 允许值的上下限。在初始时刻,每个元素的信息素 量相等,并设为信息素上限 τ0 = τmax ,初始信息素的 增量为 0。
2.1.2 适应度评价
在每次循环后,根据适应度函数,对当前循环中 找出最优解的蚂蚁进行信息素更新。本文以 BP 神 经网络的总体均方误差为适应度函数来进行评价。 均方误差越小,对应的蚂蚁选择的元素越优。
振动频谱信号处理后,利用蚁群神经网络进行故障局部诊断,以获得彼此独立的证据,再由证据理论对各证据进行融
合,最终实现对电机故障的准确诊断。实验结果表明,该方法有效提高诊断的可信度,减少电机故障分类识别的不确
定性。
关键词:振动与波;信息融合;电机;故障诊断;证据理论;蚁群神经网络
中图分类号:TM343
文献标识码:A
2.1.3 元素选取规则
图 1 故障诊断系统的结构图 Fig. 1 Structure of a fault diagnosis system
2 电机故障诊断算法实现
2.1 蚁群神经网络
蚁群算法本质上是一种全局优化的启发式优化 算法,具有鲁棒性强、易于与其它方法结合等优点。 然而,基本蚁群算法存在搜索时间过长、易于停滞等 问题。为了克服这些缺陷,Stutzle 等人提出了最大 最小蚂蚁系统 [(6] Max-Min Ant System,MMAS)。其 基本思想 [7]是将初始信息素量设为信息素上限,有 利于算法在初始阶段搜索到更多的解。并且仅让找 到最优解的蚂蚁在其经过的路径上对信息素进行更 新, 以便找到最优解。同时,对路径上的信息素进行 限制,以避免搜索停滞现象。
多传感器信息融合在电机绝缘故障诊断中的应用

加 大故 障的误 诊率 ,因此传统 的诊 断方 法必将 带来 一 定 的局 限性 。传统 的 电机绝缘 诊 断程序 见 图 2 。
2 多传 感器信 息融 合技 术
致性 解 释和描 述 [ ] 4 。
本文将 从传 统 电机绝缘 故 障诊断 出发 ,将 多传感
对于 电机 的绝缘 故 障诊断 ,系统 的不 确定性 表现
多传感器 信息 融合在 电机绝缘故 障诊 断 中的应用幸
林 波 ,程 珩
( 原 理 工 大 学 机 电研 究 所 , 山西 太 原 太 00 2 ) 3 0 4
摘要: 随着检测技术 、 号处 理技术 、 能技 术的进步,故障诊 断技术得 到 了很大的发展 , 信 智 但是 目前对电机的 故 障诊 断技术仍 因为各种原 因存在着很大 的不确定性 。 诊断系统依 然是基 于单 个参数 ( 电流 、 其 如 振动、 温度 、 润滑油成分) 能携 带的故 障特征来进行诊断 , 所 由于模型或者环境 的不确定性导致这些诊断结果模糊不清甚 至 错误 。 分析 了传统绝缘故障诊 断方法中存在 的不 确定 性弊端 , 介绍了利用 多传 感器信 息融合 进行故 障诊断 、 建 立融合故障诊断系统的优越性。 关键词 :多传感器 ;信息融合;故障诊断
机 、 加维修 工作 量和 修理 费用 。 是到 目前为 止 , 增 但 电
传统 的 电机绝 缘 故 障诊 断 系统 可 以用 图 1 述 , 描
诊 断是基 于单个 参数 和单 个特 征的 。故 障诊断 系统 通 过对 可观测 参数 的特 征提 取 以判断是 否存 在故 障从 而
作 出诊 断 ,诊断 的可信 度 由传感 器 的精度 和信号处 理 的分辨 率决 定 。 由于 电机 的绝缘 诊断项 目很 多 ,各 个
神经网络多传感器信息融合故障检测实现
向网络发小包 ,会 占用空 口带宽 ,我们可以通过 I E里面的设计选 项, 关闭 J a v a 小 应 用程 序运 行 。 5 . 4 . 3 D H C P 、N T P、 S D D P等 小载 时 , 会 发些 杂 包 , 我 们 可 以在 控 制 面 板 一 管理 工 具一 服务 下 关 闭发包 的小 程序 。 5 . 4 . 4 切换 对 H r I , P下 载 的影 响 在H T r P下载过程中,如果发生切换事件必会严重影响 H S P A 速率 , 进 而影 响 H 丌、 P下载 时延 , 故 优化 过 程 中需 重点 关 注 H 1 Y I 1 P下 载 时频 繁 切换 的 问题 点 , 加 以处理 。
一
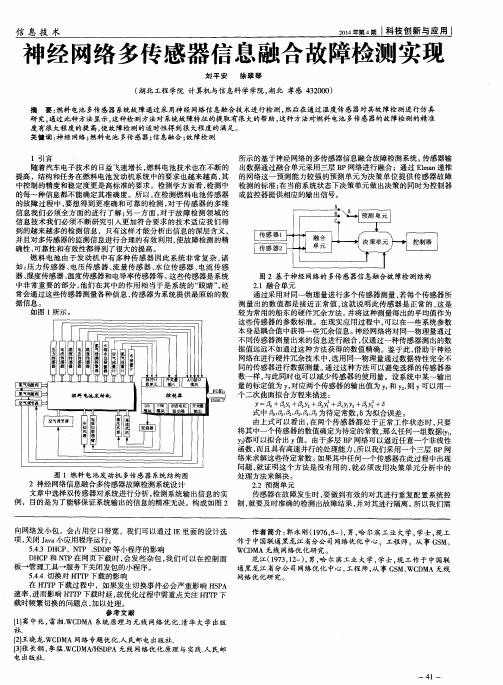
图2基于神经网络的 多传感器信息融合故障检测结构 2 , 1融合单元 通过采用对同一物理量进行多个传感器测量 , 若每个传感器所 测量出的数值都是接近正常值 , 这就说明此传感器是正 常的, 这是 较为常用的船东的硬件冗余方法 。 并将这种测量得出的平均值作为 这些 传 感 器 的参数 标 准 。在 现 实应 用 过 程 中 , 可 以在 一些 系统 参数 本身是耦合值中获得一些冗余信息。 神经网络将对同一物理量通过 不同传感器测量出来的信息进行融合 , 仅通过一种传感器测出的数 据值远远不如通过这种方法获得的数值精确 。鉴 于此 , 借助于神经 网络在进行硬件冗余技术 中, 选用同一物理量通过数据特性完全不 同的传感器进行数据测量。 通过这种方法可以避免选择的传感器参 数一样 , 与此 同时也可 以减少传感器的使用量。设系统中某一输 出 量 的标定值为 y , 对应两个传感器的输 出值为 Y 。 和y z , 则Y 可以用一 个二次曲面拟合方程来描述 :
信 息 技 术
2 0 1 4 年 第 4 期l 科技创新与应用
一种多传感器数据融合方法及应用
检测级 的信息融合是直接在多传感器分布检测系统 中检测 判决 或信 号 层 上 进 行 的融 合 , 在 的 应 用 已 现
拓展 到气象 预报 、 疗诊 断 和组 织 管 理 决 策 等众 多 医 领域 。智能仪 表在 工 业 生 产 中得 到广 泛应 用 , 由 于智能 仪 表长期 处 于不 问 断 工 作 状 态 , 且 工 作环 而
st um entB r .
Ke c smu ts n0 :ifr t n fs itlg n n tu n s cl a y y wod : l i e sr noma i u i — o n o n e i t sr me t ;a c ̄ c le i l
0 引
言
境 较 为恶劣 , 种 干扰 给 智能 仪 表 的测 量 带来 极 大 各 困难 , 如何 提 高测 量准确 度 是整 个控 制 系统 的关 键 ,
维普资讯
2 0 年 第 2 卷 第 2期 02 I
传感器技术 (0 m o asue T e n k y Ju f ld er eh o N ) Tr t
2 7
计算 与测 试
一
种 多传 感器 数 据 融 合方 法 及应 用
罗中良, 方清城, 张前进
F r hs l .n, t o fm ut sno n omain f s n i ru h o wad Th x  ̄ me trs tso o i e s a meh d o lie s rifr t u i sbo g tfr r e e p t ao — o o f eu h ws l l t a hsmeh di b t rta rdt ni tt t s a di i se edu i po etea c rc { nel e ti h tt i t o et h nta ii sa i i .n u es l m rv h c ua yn itlg n n s e o n sc ts m i
信息融合技术在传感器故障诊断中的应用
mu t l D t tge l p e F D sr e i s mmi g a n l e s ra d t r u e s r ec o e s s m, t e e r s l f t e e i a n ta ge s n o n o q e s n o t f t y t h e h n t e u t o h s h s
i si ot n o ma e f l e o h n o ma in fo b i g ts tra n wl d e a d ma e a a u e ti mp ra tt k u lus ft e i fr t r m e n e tma e l k o e g n trl me s r — o i i me t . p lc to f i o a in f so n FDD i e e td.I h p o o e t d,t e f i n d p s n s An a p i ain o n r to u in i f m s prs n e n t e r p s d meho h uso a o t
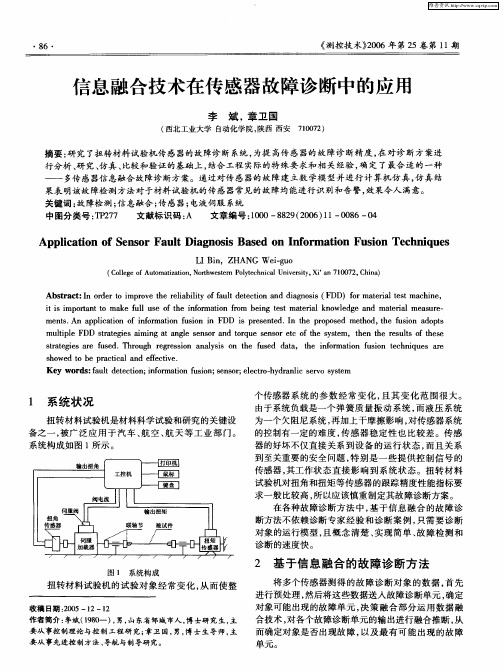
行 分析 、 究 、 真 、 研 仿 比较和 验证 的基 础上 , 合 工程 实际 的特 殊要 求和相 关经 验 , 定 了最合 适 的 一种 结 确 多传 感器信 息 融合故 障诊 断方 案 。通过 对传 感 器的 故 障建 立数 学模 型并 进 行 计 算机 仿 真 , 真 结 仿
— —
果表 明该故 障检 测 方法 对于材 料试 验机 的传 感 器常见 的故 障均 能进行 识 别和告 警 , 效果 令人 满 意。
s a g sae fsd T ru h rges n aayi o h ue aa h no ai ui eh iu s a t ti r u e . ho g ersi n s n te fsd d t,te if t n fs n t nq e r re e o l s m r o o c e
多传感器信息融合及其应用综述

多传感器信息融合及其应用综述一、本文概述随着科技的不断发展,传感器技术已广泛应用于各个领域,如工业自动化、环境监测、航空航天、智能交通等。
这些传感器可以捕获各种物理量,如温度、湿度、压力、光强、声音、图像等,为人们的生产和生活提供了极大的便利。
然而,单一传感器往往难以满足复杂环境下对信息全面性和准确性的需求,因此,多传感器信息融合技术应运而生。
多传感器信息融合,即利用计算机技术对来自多个传感器的信息进行处理,提取有用的特征信息,并消除冗余和矛盾信息,最终形成对环境的全面、准确描述。
这种技术能够充分利用各传感器之间的互补性,提高信息的利用率和可靠性,为决策提供更为全面、准确的依据。
本文旨在对多传感器信息融合技术及其应用进行综述。
将介绍多传感器信息融合的基本原理和方法,包括数据预处理、特征提取、信息融合等步骤。
将重点介绍多传感器信息融合在各个领域中的应用案例,如工业自动化中的设备故障诊断、环境监测中的空气质量预测、航空航天中的目标识别与跟踪等。
将探讨多传感器信息融合技术面临的挑战和未来的发展趋势,以期为相关领域的研究和实践提供参考和借鉴。
二、多传感器信息融合的基本原理多传感器信息融合,又称为多源信息融合或多传感器数据融合,是一种将来自多个传感器或信息源的数据和信息进行集成、处理、分析和利用的技术。
其基本原理在于通过一定的算法和策略,将多个传感器提供的关于同一目标或现象的不完整、冗余或互补的信息进行联合处理,从而生成更为准确、全面和可靠的信息描述。
多传感器信息融合的基本原理主要包括三个层次:数据层融合、特征层融合和决策层融合。
数据层融合:也称为像素级融合,是在最底层的数据级别上进行的融合。
它直接对原始传感器数据进行操作,如图像数据的像素值、声音信号的波形等。
数据层融合能够最大限度地保留原始信息,但处理的数据量大,对传感器数据的同步性和配准精度要求高。
特征层融合:是在数据的中间层次进行的,即对提取出的特征信息(如目标的边缘、形状、速度等)进行融合。
改进的D-S证据理论在电路故障诊断中的应用研究

1 引言
随着 电路 结构 的 日趋复 杂 , 对 大型 复 杂设 备 在 系统运 行状态 进行 监测 时 , 由于保 ห้องสมุดไป่ตู้ 和 断路 器存 在
准确率得 以提高 。
关键词
电路 ; S 据理论 ; D- 证 故障诊断
T 31 P 9
中 图分 类号
Ap lc to s a c n I p o e S Ev d n e The r p i a i n Re e r h o m r v d D— i e c oy
素的影响, 会导致融合 过程 中存在着 各种不确定 性。在各种非精确推理技术 中, - D S证据理论凭借
自身 的特 点 , 对 不 确 定信 息 的描 述 采 用 “ 如 区间估 计” 而不 是“ 估计 ” , 点 的方 法 , 区分不 知 道 与不 确 在 定方 面 以及精 确 反 映 证 据 收集 方 面显 示 出 很 大 的
误动、 拒动以及 因信道干扰发生信息丢失等诸多不 确 定性 因素 , 得仅 利用 单一 传感 器 进行 状 态监 测 使
与故 障诊断 时很 难 得 到精 确 的结 果 。在 进 行 状 态
灵活性 , 在处理不确定性 问题时具有独特 的优势。
2 I_ 据 理 论 )S证
设 U 为互 斥 且 穷 举 的 元 素 组 成 的命 题 集 合 ,
感 器 的精 度 、 部环 境影 响 以及 数据 的后处 理等 因 外
为 A的基本可信数。设 m , …, m , m 是识别框架 u上的基本概率 , 多概率分配函数正交和 一 o
基于模糊逻辑和证据理论的故障诊断方法
基于模糊逻辑和证据理论的故障诊断方法
吴晓平;郑之松;付钰
【期刊名称】《海军工程大学学报》
【年(卷),期】2012(024)001
【摘要】针对故障诊断过程中信息损失的问题和D-S证据理论在处理模糊信息时的局限性,在模糊逻辑的基础上,将决策级信息融合技术应用于故障诊断系统中,提出了一种基于模糊逻辑和D-S证据理论相结合的多传感器信息融合综合故障诊断方法.该方法以模糊隶属函数来实现基本可信度分配,充分利用各种传感嚣的冗余和互补信息,可显著提高故障诊断的准确率,实例验证了该方法的合理性和有效性.
【总页数】6页(P10-14,51)
【作者】吴晓平;郑之松;付钰
【作者单位】海军工程大学电子工程学院,武汉430033;海军工程大学电子工程学院,武汉430033;.海军司令部军训部,北京100841;海军工程大学电子工程学院,武汉430033
【正文语种】中文
【中图分类】TP311
【相关文献】
1.透平压缩机故障诊断中基于加权模糊逻辑和证据理论的不确定性推理 [J], 张国斌;郭亚新
2.基于模糊逻辑的作动器故障诊断方法研究 [J], 王可;夏立群
3.基于模糊逻辑的旋转机组故障诊断方法 [J], 禹柳飞;张友斌
4.基于模糊逻辑与遗传算法的故障诊断方法研究 [J], 韩洪伟;李俊山;曹志强
5.基于模糊逻辑诊断技术的汽车空调系统故障诊断方法研究 [J], 崔选盟
因版权原因,仅展示原文概要,查看原文内容请购买。
多传感器信息融合在电机故障诊断中的应用

及 其拖 动系 统 的运行 安全 性 。 目前 比较 热 门的故 障
等 分析 处 理 , 出反 映环 境信 息特 征 的 一致 性 解 释 得
和 描述 [ 因此 , 文 将 基 于 证据 理 论 的 多传 感 器 4 】 。 本 信 息融 合 技术 和 蚁 群神 经 网络 结合 起 来 , 并用 于 电 机 的故 障诊断 中 。使之 既具 有神 经 网络 的非 线性 映 射 能力 又 具有 蚁 群 算法 的全 局 收敛 等 特 点 、 以及 能 够 充分 利 用 多源 信 息 的优 势 , 有利 于 提 高 电机 故 障 诊 断的确 诊率 。
e et et r v ig o t l bl ya dr d c steu c ran tr a lcasfct na dr c g i o . f ci oi o eda n si r i it n u e n etit i moo ut lsi ai n e o t n v mp cea i e h y n f i o n i
Ab t c I r e s a t: n o d r o i r v ea c r c f r t mp o et c u a y o t r a l d a n ss a me o f h mo o u t ig o i, t d o l e s ri f r t n i t g a i n i f h mu t s n o o ma i e r t i n o n o s a p i d Af rt e vb a in s e tu sg a o lc e t l e s r r c s e , e a t o o y a g r h n u a ewo k p l . t i r t p cr m i n l le t d wi mu t s n o sp o e s d t n l n l o i m— e l t r e e h o c h i h c t r n wa s d t mp e n o a a l d a o i n c ur a h o h ri d p n e t e i e c , e h v d n e t e r s s u e o i lme tl c lfu t i g ss a d a q ie e c t e e e d n v d n e t n t e e i e c h o y wa n n h e l y d t u e t e . t t l i g o i fm o o a l s r a ie . p rme t lr s l h w a h sme h d i mp o e o f s m Ul maey d a h i n ss o t rf u t wa e l d Ex e s z i n a e u t s o t tt i s h t o s
基于多源信息融合的配电网故障诊断方法及系统与制作流程
基于多源信息融合的配电网故障诊断方法及系统与制作
流程
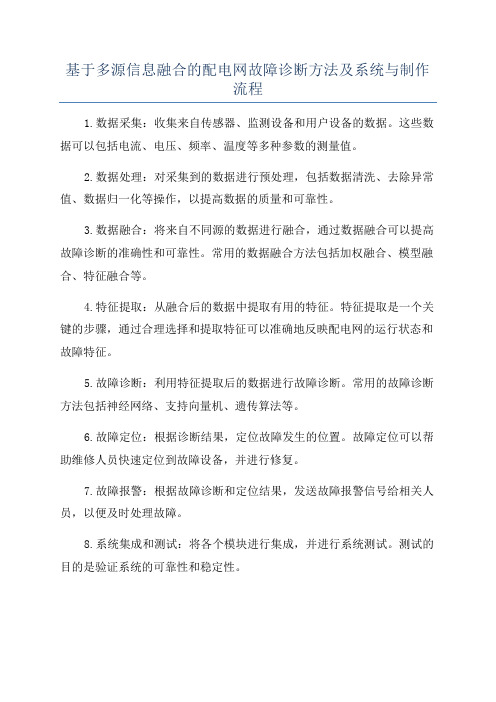
1.数据采集:收集来自传感器、监测设备和用户设备的数据。
这些数据可以包括电流、电压、频率、温度等多种参数的测量值。
2.数据处理:对采集到的数据进行预处理,包括数据清洗、去除异常值、数据归一化等操作,以提高数据的质量和可靠性。
3.数据融合:将来自不同源的数据进行融合,通过数据融合可以提高故障诊断的准确性和可靠性。
常用的数据融合方法包括加权融合、模型融合、特征融合等。
4.特征提取:从融合后的数据中提取有用的特征。
特征提取是一个关键的步骤,通过合理选择和提取特征可以准确地反映配电网的运行状态和故障特征。
5.故障诊断:利用特征提取后的数据进行故障诊断。
常用的故障诊断方法包括神经网络、支持向量机、遗传算法等。
6.故障定位:根据诊断结果,定位故障发生的位置。
故障定位可以帮助维修人员快速定位到故障设备,并进行修复。
7.故障报警:根据故障诊断和定位结果,发送故障报警信号给相关人员,以便及时处理故障。
8.系统集成和测试:将各个模块进行集成,并进行系统测试。
测试的目的是验证系统的可靠性和稳定性。
通过上述制作流程,可以制作出基于多源信息融合的配电网故障诊断方法及系统。
该系统可以提高故障诊断的准确性和可靠性,帮助维修人员及时处理配电网故障,提高配电网的运行效率和可靠性。
运用信息融合的电路故障诊断方法研究
信息融合技术作为一 门交叉 学科 , 军事领 域 已 在 获得广泛应用 。近几年来 , 人们将信 息融合 技术应 用
通过对正常电路板 与故 障电路板 的端 口特性进行 比对 , 可以在不 涉及 电路 功能 、 电 、 断 没有 联机测 试条
于故障诊断领域 。本文应用模 糊集理论 和 D s证据
理论 , 论述 了基于多传感 器融合 的 电路 故障诊 断方 法的基本原理 , 提出 了运用 信息融合 技术进 行 电路 故
修 改稿收 到 日 :0 1一 l 7 期 2 1 O 一1 。
件下进行 检测 , 则上 适用 于任 何器 件 组成 的 电路 。 原
但是 , 方法只能将故 障隔离 到结点 , 该 且难 以判断高 阻 器件的故 障。
诊断成本低 、 通用性强 。但 这些方法 对不 同的故 障敏 感度不 同, 且每种方法 都有一 定 的局 限性 。这必 然导 致故障诊断不确定性 , 至出现漏检和误诊断 的现象 。 甚
障诊断的新方法 , 而指 导 电路 参数 的测量 、 集 、 从 采 分
析和处理 , 为解 决电子 电路故 障诊 断 的不 确定性 问题 提供 了一条新的途径。
小排 序 , 成 序 列 码 c( 。最 后 , 形 z) 比较 C( 与 z) D( , 同者对应的 z 即为故 障元 件。该 方法对 容 Z)相
差电路和非线性 电路均有效 , 但不能诊断多故障 。 由此 可见 , 传统诊断方法虽然简单实用 , 但只能诊 断某一类 型的电路故 障 , 不能诊断多故障现象 , 且存 在 诊 断故障不确定 性问题 。对 此 , 本文 提 出一种多传 感 器信息融合 的电路 故障诊 断方法 , 以克服 基于单 一 信 息诊断方法 的不 足 , 提高故障定位准确率 。
基于多源信息的配电网故障研判方法
2018年第8期总第375期基于多源信息的配电网故障研判方法邱灿树(广东电网潮州潮安供电局有限责任公司,广东潮安515638)以往的配电网故障均是由用户通过电话等汇报电力客服,调度员依据报修用户汇报信息和经验来判断故障点和确定停电范围,再进行停电抢修单的下发,指导抢修人员进行停电抢修工作。
该做法一方面会由于用户报修不及时,造成对停电事件判断的滞后性,另一方面由于用户报修的范围不全,造成对故障区段及设备判断模糊[1-4]。
随着科学技术的发展,SCADA 系统实现了电力系统的远程监控,其优点是信息实时性强,节约了人力监控成本,实现了故障的“早发现,早处理”等,但是其信息量庞大、信息内容复杂、信息冗余性、故障辨识率差等缺点,针对配电网DSCADA 介绍配电网故障的定位必须依靠人力分析诊断,从而造成配电网故障定位模糊,故障诊断时间长,研判准确率低等缺点,不利于电网的发展[5-6]。
因此需要科学的方法来对配电网故障进行快速且准确的研判。
基于多源数据信息融合实现配电网智能故障研判体系,可以有效地解决多源数据对配电网故障诊断造成的干扰,并且根据多源数据对配电网故障做出精准的定位,通过故障精准定位、故障区段隔离以及非故障区段恢复供电运行模式,有效缩减故障抢修工作对非故障区段用户正常用电的影响[7]。
该体系可提高停电抢修过程中主动性与智能性,达到快速准确定位故障区域,提高配网供电可靠性和配电网抢修工作效率,减少停电时间。
这一体系的研究与应用不仅可以有效地解决目前配电网故障研判存在的问题,而且对于我国智能电网的发展有重要意义[8-9]。
1配电网多源故障信息及其融合技术研究1.1配电网故障信息的分类配电网发生故障时,会有多种不同层面的故障信息上传,如图1所示,其中主要信息来源包括:配电网自动化系统监测到开关变位及故障跳闸信息,调度自动化系统监测到开关事故分闸告警信息及保护动作信息,用电信息采集系统监测到配变、电能表运行信息、电流、电压、负荷等采集信息,95598接到用户报修信息。
基于多模态信息融合的变压器在线故障诊断方法

基于多模态信息融合的变压器在线故障诊断方法目录一、内容概括 (2)1.1 背景与意义 (2)1.2 国内外研究现状 (3)1.3 研究内容与方法 (4)二、多模态信息融合技术基础 (5)2.1 信息融合的定义与分类 (6)2.2 多模态信息融合的技术框架 (8)2.3 多模态信息融合在变压器故障诊断中的应用前景 (9)三、变压器故障特征提取 (10)3.1 变压器故障类型及特点 (11)3.2 故障特征提取方法 (12)3.3 多模态信息融合下的故障特征提取 (13)四、多模态信息融合故障诊断模型 (14)4.1 模型构建思路 (15)4.2 模型结构设计 (17)4.3 模型求解方法 (18)五、实验验证与分析 (19)5.1 实验数据与评价指标 (20)5.2 实验结果与分析 (21)5.3 与其他方法的对比 (22)六、结论与展望 (24)6.1 研究成果总结 (24)6.2 研究不足与改进方向 (25)6.3 未来研究展望 (27)一、内容概括随着电力系统的不断发展,变压器作为电力系统中的关键设备,其安全稳定运行对于保障电力供应至关重要。
由于变压器的复杂性和长寿命,故障问题在实际运行过程中难以避免。
研究和开发一种有效的在线故障诊断方法具有重要意义,基于多模态信息融合的变压器在线故障诊断方法是一种新兴的诊断技术,它通过综合运用声学、电磁场、温度等多种传感器获取变压器的实时运行状态信息,并利用现代信号处理和机器学习技术对这些信息进行分析和处理,从而实现对变压器故障的准确诊断。
本文将详细介绍该方法的理论基础、关键技术以及实验验证结果,旨在为变压器在线故障诊断提供一种有效且实用的方法。
1.1 背景与意义传统的变压器故障诊断主要依赖于单一模态的信息,如油中溶解气体的分析、局部放电检测等,这些方法虽然在一定程度上能够识别出一些常见的故障,但在面对复杂、隐蔽的故障时,其诊断效果往往不尽如人意。
随着信息技术的不断进步,多模态信息融合技术在各领域得到了广泛应用。
小经神经网络的信息融合传感器故障诊断方法
口动 量 因 子 赋 以 初 始 值 ,输 入 计 数 样 本
i =1l
的信 息融 合 传 感 器故 障 诊 断新 方 法 。 本 文
通 过 MATLAB 仿 真 和 模 拟 空 调 系 统 温 度 传
x = i: bj - ̄ ∑W~ +2- x
节 点 总 的输 入 ,
j 个
S e 2 给 输入 本 和目 输出 t p :; 定 样 } 标 样
本
感 器漂 移 故 障诊 断 实验 表 明 ,在 相 同的 条 件 下 , 小 波 网络 在 解 决 传 感 器 故障 检 测 、
分 离和 补 偿 问题 上 应 用 。
关键 词 :传 感 器故 障 ;小 波 神 经 网络 故 障 诊 断 引 言 随着 工 业 控制 系统 的规 模 和 复 杂程 度 迅 速 增加 , 系统 中 使用 的传 感 器 的 数量 和 种 类 也越 来 越 多 。 传 感 器是 采 集 信 号的 主 要 工 具 ,用于 监 测 温度 、压 力 、 压 差等 信 号 , 保证 系统 正 常运 行 。若 其 出现 故障 , 以 往 往 会 产 生错 误 的 监 测 信号 ,导 致 产生 非 常 严 重 的后 果 ,故 对其 检 测 十 分 必 要 。 目 前 传 感 器故 障 检 测 方 法 主 要 有 硬 件 冗 余 法 、专 家 系统 法 、 解析 冗 余 法 、 神 经 网络 方法 等。其 中 ,硬 件冗余法 使用设 备 多, 占 用 空 间大 ,费 用 高 ;专 家 系 统 法知 识 获 取 困 难 ,对 新 颖 困难 不能 诊 断 ;解析 冗余 法 需 要 一个 精 确 的数 学 模 型 ,这 在 实 际实 现 上 有 相 当的 困 难 。而 人 工 神 经 网络 不需 要 知 道 系统 的数 学 模 型 ,只 通过 样 本 的学 习 来 掌 握数 据 之 间的 关 系 ,因 而 可 以用 于 传 感 器 故障 诊 断 和信 号 恢 复 。 本 文提 出基 于 神 经 网络 的传 感 器 故障 诊 断 方 法 ,使 用 神 经 网 络来 建 立 传 感 器 的动 态 预 测 模 型 ,然 后利 用模 型 根 据 当前 传 感 器 测量 值 来 产 生 下 一 时刻 的 预 测 值 ,最 后 分析 预 测 值 和 实 际 测 量值 之 间的 残 差 ,来 判 断 故障 。本 文 尝试 引入 小 波 神经 网络 应 用于 空 调 机 组 传 感 器 的故 障 诊 断 ,仿 真 分 析 和 模拟 实 验 结 果 表 明该 方 案 可 以很 好 的 解决 空 调 机 组 的 传感器故障诊断问题。 小 波神经 网络 ( NN )结构 及训练 算 w 法小 波神 经网络 基本结 构 ,输入 端有 1 个 节点 ,隐有 H 个节点 ,输出层有 J 个节 点 , 给定 P 组输 入输 出样本 ,每组 输 入 样本 为 』 1 … , ,网络输 出为 户 1 … , , , 力 ,
传感器故障的神经网络信息融合诊断方法
传感器故障的神经网络信息融合诊断方法房方;魏乐【期刊名称】《传感技术学报》【年(卷),期】2000(013)004【摘要】提出了一种控制系统传感器故障诊断的结构形式,针对多传感器系统的特点,将相关传感器的输出数据综合,应用神经网络的非线性拟合能力扩展相关信息,信息融合诊断策略根据这些信息确定出故障传感器,同时对故障信号进行恢复.仿真实验表明该结构形式对于传感器的三种常见故障均能进行识别和恢复,效果令人满意.%This paper proposes a structural form of sensor failure diagnoses. To the characteristic of multi-sensor system, synthesizing the output data of relational sensors, using the non linear approach ability of neural network expand relational information. According to the infor mation, the fusion diagnoses strategy can ensure the fault sensor and resume the fault signal.Simulation tests show thai the structural form can identify and resume three kinds of normal failure. The effec t is satisfactory.【总页数】5页(P272-276)【作者】房方;魏乐【作者单位】华北电力大学动力工程系,保定071003;华北电力大学动力工程系,保定 071003;Dept. of Power Engineering, NCEPU. Baoding 071003【正文语种】中文【中图分类】TP21【相关文献】1.小经神经网络的信息融合传感器故障诊断方法 [J], 王蕾;伦志新;张艳丽2.基于神经网络信息融合的智能故障诊断方法 [J], 李斌;章卫国;宁东方;尹伟3.基于信息融合和神经网络的模拟电路故障诊断方法研究 [J], 何如龙;薛玉娟;李昭锐4.基于神经网络和D-S证据理论的信息融合故障诊断方法 [J], 朱汗青;马振书;孙华刚5.基于信息融合的小波神经网络航姿系统故障诊断方法研究 [J], 邓森;杨军锋;王东因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种多传感器信息融合电路故障诊断方法
【摘要】针对电路故障元器件诊断不确定性问题,提出了电路元器件故障诊断的多传感器D-S信息融合方法。
该方法通过测量被诊断电路中元件的电压、温度两个参数,获取二个传感器对待诊断元件的信度函数,然后得出融合信度函数,从而确定故障元件。
诊断实例结果证明了该方法的有效性。
【关键词】多传感器;信息融合;D-S证据理论;故障诊断
1.引言
目前,信息融合技术已成为一个十分活跃的研究领域,在机器人系统、图像分析与处理、目标自动识别、卫星遥测遥感等领域应用越来越广泛,但真正将信息融合技术应用于电子电路故障诊断领域还不多。
鉴于电子电路元件的参数离散性、运行环境不稳定性等因素,使用单一传感器来确定电子电路信息就可能存在不确定性,这样必然造成不能准确诊断故障,乃至漏检、误诊现象[1]。
借鉴多传感器信息融合技术,可以解决电子电路故障诊断所固有的的不确定性难题。
根据信息论原理,来自多传感器或多源的信息的含量比任何一个单维信息量都要大,这使得多传感器信息融合技术能合理协调多源数据,充分综合有用信息,较好地解决电路故障诊断不确定性问题,增加置信度,提高电路故障诊断的准确度和可靠性。
2.D-S证据理论信息融合算法
2.1 融合诊断原理
D-S证据理论是鉴于某一事件发生后的结果,寻求该事件发生的原因。
针对不确定性推理的多属性诊断问题,D-S证据理论是一个融合主观不确定性信息判断的有效手段。
运用D-S证据理论方法是:第一步是预先对多个传感器或信息源数据(证据)进行处理;第二步是对各个证据的基本可信度分配值进行估算;第三步是依据D-S证据理论合成规则,对联合所有证据作用下基本可信度分配值进行估算;最后是根据相关判定原则来确定以可信度最大值作为信息融合结果[2]。
D-S证据理论运用于实际电路故障诊断过程:第一步,对电路故障产生的若干症状进行分析,估算这些症状下各个故障可能发生的概率;运用多传感器测试待诊断电路,从而获
得各个传感器测试症状分别属于各类故障的信度函数m1(A1)…m1(An)、m2(A1)…m2(An);第二步,运用D-S合成法则进行多传感器数据融合,得出经过信息融合后症状属于各类故障的信度函数m(A1)…m(An);最后按照判定原则确认故障类型。
基于D-S证据理论的故障诊断过程参见图1所示。
图1 D-S融合的故障诊断框图
2.2 多传感器数据融合算法
2.2.1 信度函数的获取
信度函数分配是一种人为推理,是一种人对故障模式假设的可信程度推断,该推断极易受各种因素的制约,因此不同思路会形成不同信度函数分配公式。
传感器对目标模式Ai的信度函数:
mj(Ai):
(1)
式(1)中:N是传感器总数;Nc是目标模式数;Wj是传感器j的环境加权系数;为传感器j最大相关系数;是传感器j相关分配值;Rj是传感器j可靠性系数;Cj (Ai)是传感器j对目标模式Ai的相关系数。
传感器j不确定性的信度函数:
(2)
在式(1)、(2)中,主要是确定传感器j对Ai的相关系数Cj(Ai)值,N、Nc一般是定值,由传感器特性和现场经验来确定Wj。
在物理意义上,?j、Cj(Ai)均表示根据某一传感器测量值,来评估被测目标隶属于某一目标类型的程度,即这两个量之间相关度,故以模糊集理论中隶属度函数?j替代Cj(Ai)。
2.2.2 隶属度函数的形式
必须根据传感器的工作特性和被测参数的特性,确定隶属度函数[3]。
例如,针对电路中某一元器件而言,当外部环境稳定且电路工作正常时,电路中关键点具有稳定的电压值,当然其温度值也是稳定的;若电路中某一元器件发生故障时,电路中关键点电压值毫无疑问会偏离正常值,其温度信号也必然发生变化(下降或上升),且温度或电压与正常值偏差越大,则出现元器件故障的几率越大。
根据观察的实验数据,并且结合隶属度函数的待定系数法,定义隶属度函数表达式:
(3)
在式(3)中,ej为待诊断元件参数的正常变化范围,tj为待诊断元件参数的极限偏差,x0j为电路工作正常时被测元件的标准参数值,xj为传感器测定的实际值,为修正系数,?j为传感器测定被诊断元件j属于故障的隶属度。
2.2.3 D-S融合与故障判定规则
(1)D-S融合算法
设m1和m2是幂集2Ω上二个互相独立的基本概率赋值,A1,A2,…,Ak 和B1,B2,…,Bk为信度函数的焦元,,则2Ω是融合后信度函数分配,m=m1m2。
当时,
当时,
(4)
在式(4)中,表示空集;
表示包含完全冲突假设Ai和Bj的所有信度函数乘积之和;1-C是确保融合后的信度函数在[O,1]上。
假设C=1,则ml、m2矛盾,不存在m,基本可信度分配就不能组合;C≠1,可以确定m是一个信度函数。
式(4)给出的证据组合即为D-S组合法则,若有多个证据组合,采用该法则对证据进行两两综合即可。
在实际电路故障诊断中,焦元A1,A2,…,Ak和B1,B2,…,Bk为待诊断各个故障元件的集合,m(A)则表示融合后分配到待诊断各个故障元器件上的信度函数值。
(2)故障判定规则
①不确定信度函数要小于某一门限,如取0.15。
②诊断的故障元件的信度函数值必须大于不确定信度函数值,如取≮0.45。
③诊断的故障元件和其它元件的信度函数值之间差值必须大于某一门限,如取0.45。
④诊断的故障元件要有最大信度函数值,必须大于某一阀值;若阀值过小或过大,则容易产生故障误判或漏判现象。
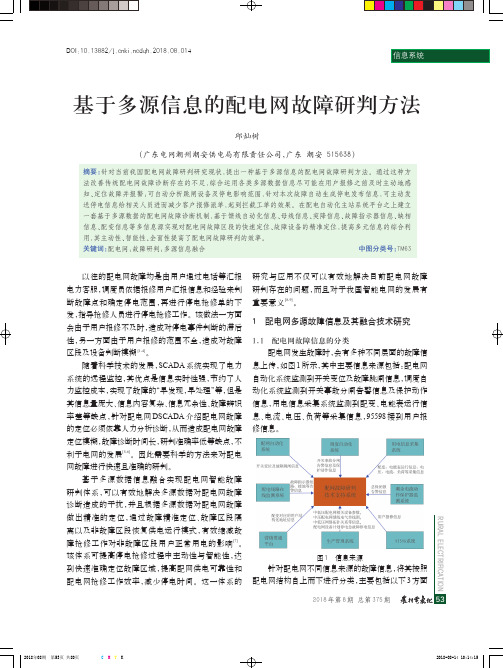
3.放大电路故障诊断实例
图2为待诊断故障电路图,该电路是一个小信号放大电路,其中三个运算放大器LM318为待诊断元件,称为A1、A2、A3。
以u1、u2、u3分别为A1、A2、A3的电压测试点,其故障诊断过程如下:
图2 待诊断故障电路
3.1 采集数据
利用红外测温仪检测待诊断元件A1、A2、A3的温度,探针检测A1、A2、A3的输出电压u1,u2,u3,通过调节放大电路输入信号ui,从而获取得多组测量值,其中含正常值和故障值。
3.2 计算信度函数
依据所测量值和故障隶属函数来确定相关系数Cj(Ai),再计算待诊断元件的信度函数。
传感器数目N=2,待诊断元件Nc=3,取电压传感器权系数W2=0.3,温度传感器权系数W1=0.7,由式(1)、(2)计算元件A2故障时,待诊断元件A1、A2、A3的信度函数;然后,由式(4)计算A1、A2、A3的融合信度函数值m(Ai)和不确定度m(θ),最后确定故障诊断结果。
故障诊断比较参见表1。
表1 故障诊断比较
传感器信度函数不确定度结果
电压m1(A1)m1(A2)m1(A3)m1(θ)不确定
0.0010 0.5672 0.2040 0.2288
温度m2(A1)m2(A2)m2(A3)m12(θ)A2
0.0090 0.7084 0.1820 0.1004
融合m(A1)m(A2)m(A3)m(θ)A2
0.0028 0.8333 0.1332 0.0308
3.3 故障诊断结果剖析
根据表1的数据来看,在待诊断元件A1、A2、A3中,单独使用电压传感器或温度传感器提取的信度函数值,则有一些数值比较相近;若仅用单一一传感器的信度函数分配值来判定故障元件,则可能出现故障元件A2不能确定情况。
然而经过多传感器数据融合后,从信度函数值上看,元件A2明显高于元件A1、A3,故可明确判断A1、A3是正常元件,A2为故障元件。
由此可见,多传感器信息融合后信度函数值降低了其它类型的信度函数值,提高了实际目标的信度函数值,进而有效地减少了故障元件的不确定性。
若用电压或温度传感器来单独识别时难于判断的故障元件,融合后就能完全准确识别出来。
因此,采用基于D-S证据理论的多传感器数据融合方法,可以明显提升电路故障诊断的可靠性和准确性[4]。
4.结束语
本文介绍了基于D-S证据理论的信息融合算法,提出了一种多传感器信息融合的电路故障诊断方法,故障诊断的重要依据来自于电压和温度这二个物理量,采用多传感器信息融合进行故障诊断,并将其应用于电路的故障诊断之中。
故障诊断实例结果表明,多传感器信息融合克服了基于单一信息诊断方法的不足,使有效、快速的电路故障诊断得以成为可能,并提高故障元器件定位的准确率,对电路故障诊断是可行且有效的。
参考文献
[1]周中良,等.模糊理论在多传感器信息融合中的应用[J].火力与指挥控制,2008(3):74-76+79.
[2]王媛彬.多传感器信息融合概述及其应用[J].传感器世界,2010(12):6-9+24.
[3]刘鹏等.基于D-S证据理论的鸡蛋新鲜度多传感器融合识别[J].农业机械学报,2011 (8):122-127.
[4]吴晓平,等.基于模糊逻辑和证据理论的故障诊断方法[J].海军工程大学学报,2012 (1):10-14+51.。