磁粉制动控制器
磁粉制动器说明书

接,避免轴端承受向力。当采用皮带轮传动时,建议用支架或其它相应的机构将
他与磁粉制动器隔离。
■机座式磁粉制动器外形尺寸
型号
d
H1
L
L1
L5
L4
H
L2
L3
d1
b
FZJ-0.2 9
55
115
26
100 115 105
19
37
5.5 削偏
0.5
12
72
131
60
110 125 139
19
23
6.5
4
1
12
100 135
激磁电流(A)
0.4
0.5 0.6 0.8 0.8 1 1.6 2.0 2.5 2.5 3
5
5
允许滑差功率(kw)
0.2
0.5 0.8 2
4
8 10 12 15 20 30 50
60
重 量(kg)
3
4
7 15 20 45 65 120 200 240 410 960 1800
■法式磁粉制动器技术参数
100
30
152
80
65
50
117
30
188
95
78
62
151
40
220
118
100
74
178
57
288
160
140
100
229
65
335
174
150
110
261
65
395
230
200
130
315
95
400
240
磁粉制动器说明书
地址:成都市锦江工业开发区潘家沟基地
传真:总机转 816
邮编:610063
3
磁粉制动器使用说明书
■快速响应特性
磁粉制动器因其固有地结构特点,确定了该种产品地无响应时间、转矩上升 时间及转矩下降时间都很短,磁特性决定了磁粉制动器可以应用于需频繁启停、 换向的应用场合。特殊需要的可以经过进一步的优化机械部分和改进加载电源可 进一步的优化机械部分和改进加载电源可进一步提高响应速度。以 5kgm 的磁粉 制动器为例,其无响应时间为 25ms,其转矩上升下降时间分别为 270ms,其转 矩上升下降时间分别为 270ms 和 350ms。
110
L2
b
M
6
削偏 4-M4
20
4
6
20
5
6
20
6
6
24
8
6
34
8
10
40
10
10
36
14
12
8
18
12
8
18
12
8
20
12
四川诚邦测控技术有限公司 电话:028 — 85951801~05(总机)
地址:成都市锦江工业开发区潘家沟基地
传真:总机转 816
邮编:610063
6
■空心轴式磁粉制动器外形尺寸
75
325 543 250 520 600 610 110
50
22
20
四川诚邦测控技术有限公司 电话:028 — 85951801~05(总机)
地址:成都市锦江工业开发区潘家沟基地
传真:总机转 816
邮编:610063
5
磁粉制动器使用说明书
500
本科毕业设计PLC张力控制系统的设计5
绪论随着科学技术的不断进展,工业生产的自动化程度不断地提高,微处置器、运算机和数字通信技术的应用愈来愈普遍。
工业自动化的主要支柱之一——PLC 在工业生产上具有普遍的应用,如造纸业、纺织业、橡皮业、薄膜加工业等等。
而PLC张力控制在上述工业中具有关键的作用。
在一般的造纸厂、印刷厂、纺织漂染厂、食物厂等,当处置一些如纸张、薄片、丝、布等长尺寸材料或产品时,都会用上卷壳及滚筒组成的加工生产线,因此,放料作业的张力控制,便成为通用的基础技术。
张力控制的作用就是在料膜动态处置进程中,维持恒定的张力,抑制外来干扰引发的张力抖动。
以料膜为例,在放卷,收卷和供料进程中,料膜上要维持必然的张力(或称之为拉伸力),过大的张力会致使料膜变形乃至短裂,而过小的张力又会使料膜松弛,致使褶皱,或处置尺寸不准等弊病。
如此就要求在料膜的处置进程,要维持恒定的张力。
张力控制的作用就是在料膜动态处置进程中,维持恒定的张力,抑制外来干扰引发的张力抖动。
本设计利用了伺服电机,三菱变频器、普通电机、西门子可编程控制器(PLC)、角度传感器。
项目中对两部份张力控制所选用的电机不同,是因为考虑到了生产本钱的因素。
在卷膜传送部份,需要的控制要求高,因此选用在性能好但价钱高的伺服电机,而在卷纸回收部份,需要的控制要求比较低,因此选用了廉价但能知足生产要求的普通电机。
设计中的张力控制系统,在利用传感器上选择了角度传感器。
通过对传送卷膜、卷纸的可动辊与水平面的夹角的测量,来判断张力大小是不是发生转变。
把检测出转角的模拟量送入控制器——PLC中进行控制。
第一章:张力控制系统的初步熟悉张力控制系统概述1.1.1 张力控制在一般的造纸厂、印刷厂、纺织漂染厂、食物厂等当处置一些如塑料膜卷、纸张、薄片、丝、布长尺寸材料或产品时,都会用上卷壳及滚筒组成的加工生产线,因此,放料作业的张力控制,便成为通用的基础技术。
以料膜为例,在放卷,收卷和供料进程中,料膜上要维持必然的张力(或称之为拉伸力),过大的张力会致使料膜变形乃至短裂,而过小的张力又会使料膜松弛,致使褶皱,或处置尺寸不准等弊病。
电动助力转向简介
电动助力简介■何谓EPS电动转向系统EPS就是英文Electric Power Steering System的缩写,即电动助力转向系统。
电动助力转向系统是汽车转向系统的发展方向。
该系统由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。
另外,还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点。
正是有了这些优点,电动助力转向系统作为一种新的转向技术,将挑战大家都非常熟知的、已具有50多年历史的液压转向系统。
驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转距电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。
汽车不转向时,电子控制单元不向电动机控制器发出指令,电动机不工作。
■技术优势1、节能环保由于发动机运转时,液压泵始终处于工作状态,液压转向系统使整个发动机燃油消耗量增加了3%~5%,而EPS以蓄电池为能源,以电机为动力元件,可独立于发动机工作,EPS几乎不直接消耗发动机燃油。
EPS不存在液压动力转向系统的燃油泄漏问题,EPS通过电子控制,对环境几乎没有污染,更降低了油耗。
2、安装方便EPS的主要部件可以配集成在一起,易于布置,与液压动力转向系统相比减少了许多元件,没有液压系统所需要的油泵、油管、压力流量控制阀、储油罐等,元件数目少,装配方便,节约时间。
3、效率高液压动力转向系统效率一般在60%~70%,而EPS的效率较高,可高达90%以上。
4、路感好传统纯液压动力转向系大多采用固定放大倍数,工作驱动力大,但却不能实现汽车在各种车速下驾驶时的轻便性和路感。
而EPS系统的滞后特性可以通过EPS控制器的软件加以补偿,使汽车在各种速度下都能得到满意的转向助力。
磁粉制动器工作原理
磁粉制动器工作原理
磁粉制动器是一种利用导电粉末(磁粉)在磁场作用下实现制动效果的装置。
其工作原理如下:
1. 磁场产生:通过通电产生的电磁铁产生一个磁场。
2. 磁力导电粉末:在磁场作用下,磁粉具有导磁性,即磁力可以通过磁粉传导。
3. 粉气隙的填充:磁粉被充填在制动器的工作腔中,形成粉气隙。
4. 电流控制:通过控制电流的大小来调整磁场的强弱。
5. 制动效果:当磁场加强时,磁粉颗粒之间会产生磁吸力,使粉对之间接触面增大,从而增加摩擦力,实现制动效果。
6. 松开制动:当电流减小或断开时,磁场减弱,磁粉颗粒之间的磁吸力减小,粉对之间的摩擦力减小,实现制动的松开。
磁粉制动器工作原理的基本思想是通过调整电磁铁电流的强弱来控制磁场大小,从而控制磁粉颗粒之间的磁吸力,实现对工作腔摩擦力的控制。
这种制动方式通常用于需要可调节制动力矩的场合,如汽车刹车系统、卷材设备、摩擦带输送机等。
ZXT-B- 自动张力控制器说明书
使用手册型自动恒张力控制器瑞安市中星工控设备有限公司地址:浙江省瑞安市经济开发区朝阳路87号电话:0577-******** 65608162传真:0577-********-815网址:邮箱:zxtec@软件版本 1.3自动/AUTZXT-B 系列自动恒张力控制器使用说明 目 录一、快速操作和使用-----------二、型号说明--------------- 三、控制器及张力检出器尺寸------- 四、张力检测器的安装----------五、控制器各部件名称及作用------- 六、恒张力工作原理-----------七、配线----------------八、霍尔开关的作用-----------九、极限输出的原因与作用--------十、双工位转换开关-----------十一、模拟量输出------------十、参数的设置 ------------- P1 P2 P2 P4 P5 P6 P8 P9 P9 P10 P11 P12声明:由于本控制器内使用目前比较先进的A/D、D/A集成电路,故有关电路资料本公司保留,尽请谅解。
一、快速操作和使用1. 安装张力检测器:用户可根据自己的需要水平、垂直或侧面安装张力检测器。
注意:张力检测器不允许和物件硬安装,应尽量使用万向 轴承座过渡安装,安装的螺丝不应长于过张力检测器的固定板;垂直安装张力检测器要注意张力检测器支点朝上即引线朝上;侧面安装张力检测器需注意侧面的固定螺丝不能过长否则将会导致检测器永久性损坏。
2. 安装张力控制器:根据本说明书配线部分相应连接好控制器的输入输出和电源线。
注意:张力控制器电源线应尽量远离电路干扰源如按钮、交流接触器等电器。
3. 开机检查张力检测器:待以上安装完毕后打开控制器电源,按菜单号进入菜单6号传感器监视画面检查传感 器是否安装正常,正常时两只张力检测器的值应该在10000-200000之间,此时用手去压张力检 测器数值会明显变大就表示安装正常。
恒张力控制实现的几种方案
恒张力控制实现的几种方案在日常工作中,我们经常遇到张力控制问题,张力控制得好坏直接影响着产品的质量,由于张力控制的多样性及复杂性,选用一套合理经济实用的张力控制系统是企业采购设备前所要考虑的首要条件。
下面我列举几中常见的张力方式供大家参考。
一、力矩电机及驱动控制器1、性能:张力控制不稳定,线性不好。
2、经济性:设备简单,价格便宜,可正反转。
3、适用于张力精度要求不高的场合。
如:电线、电缆。
二、磁粉制动器/磁粉离合器张力控制1、经济性:电气省不了钱,机械也费钱,同样需要调速单元(如变频器、直流调速器)及张力控制仪。
2、精度差:线性不够好,控制的卷径变化范围不大。
(特别是在大负荷或高速时张力精度不够);3、故障率高,维护费用高(经常要更换磁粉),磁粉制动器/磁粉离合器的可靠性差,发热严重功率大的还需水冷等。
4、性能:张力稳定性比力矩电机稍强,张力及速度可调。
适用范围比力矩电机广。
三、舞蹈棍控制器1、性能:张力控制平稳,有张力贮能功能、张力调节麻烦。
2、电气调速单元要求响应快,机械设备较复杂、局限于线材不适合于片材。
如:光纤,光缆。
四、直接张力闭环控制1、性能:张力控制平稳,电气调速单元要求响应快,张力可视,系统容易振荡。
2、电气设备复杂,需要调速单元、张力控制仪及张力传感器,设备初投资大,价格贵。
3、性能价格比不高,不适用于大张力控制场合。
五、全新的间接张力控制系统1、采用ABB全新的间接张力控制系统,不需要磁粉制动器/磁粉离合器,不需要张力控制仪及张力传感器,只需调速器(罐装卷曲软件)直接带动电机就可以实现恒张力控制。
2、内置卷径计算功能,卷径输出可视,具有静态补偿及加速补偿。
3、张力线性可调精度达到1%,速度线性可调精度达到0.1%, 方向可正反转, 卷径可达1.5米,速度可达500米/分,张力0~2000KG可调。
4、性能:优越的性能价格比,维护方便,调试较复杂,需要专业的调试工具及调试软件。
低温环境下球罐磁粉检测灵敏度的研究应用
低温环境下球罐磁粉检测灵敏度的研究应用【摘要】文章介绍了灵敏度测试机器常规磁悬液的对比、磁悬液的配制等,介绍了在低温环境下对铁磁性才来哦采用乙二醇磁悬液进行灵敏度测试与表面磁粉检测的方法。
在低温环境下进行磁粉检测,采用乙二醇磁悬液其灵敏度较高。
【关键词】应用灵敏度乙二醇磁悬液磁粉检测球罐在铁磁性材料的近表面及表面的缺陷检测中,磁粉检测的特点诸多,例如:高灵敏度、灵活、方便等。
文章介绍了在低温环境下全面检验丙烯球罐,在检测磁粉时,采用常规水基磁悬液无法进行检测,因为水基磁悬液会瞬间在金属表面凝固。
所以,有必要研发能在低温环境下检测铁磁性材料表面磁粉的方法。
乙二醇易溶于水,是具有甜味、粘稠、无色的不易挥发的液体。
按照任意比例,将乙二醇与水混合能够大幅降低凝固点,197摄氏度为乙二醇的沸点,12.5摄氏度为乙二醇的凝固点。
在低于零下三十摄氏度的环境下,乙二醇防冻液依然能够保持良好的稳定性、流动性、防冻性,因此,在进行低温状态检测试验时,采用乙二醇防冻液与磁粉调和来完成检验球罐的任务。
1 仪器的使用及乙二醇磁悬液的配制试验试板采用300毫米×500毫米的钢试板,采用型号为AR8021的红外线测温仪;钳形磁型号为CJE-1型,CXE-1为交叉磁轭。
在通常特种设备常规检测磁粉中,林敏度试片可采用A1-30/100型。
交叉磁轭法能够将工件表面任何方向的缺陷一次性检测出来,并具有较高的检测效率及检测灵敏度。
由于在检测铁磁性材料近表面及表面裂纹,因此在现代检测方法中获得广泛的应用,具备了高灵敏度、操作方便、设备简单等特点。
在检测的过程中,各个方向存在的缺陷可通过改变磁轭方向的方式来解决。
同一部位的相互垂直检测操作至少应做两次,可避免实际检测中的漏检。
按照检测磁粉的标准,乙二醇防冻液中与检测无关的着色剂、防垢剂、缓冲剂等添加剂应按照防冻液生产厂的要求进行有效去除,最终制成符合检测要求的、无臭味、无荧光、高闪点的乙二醇载液。
电磁制动器的原理与设计说明书
1 引言1.1 课题研究的背景及意义制动器是保障汽车安全运行、取得预期运行效益的最基本的使用性能,因此汽车制造厂、使用者、汽车维修和管理人员都很重视车辆的制动性。
随着车辆技术的进步和汽车行驶速度的提高,这种重要性日渐突出,众多的汽车工程师在改进汽车制动性能的研究中倾注了大量的心血。
目前关于汽车制动的研究主要集中在制动控制方面,包括制动控制的理论和方法以及采用新的技术。
最原始的制动控制只是驾驶员操纵一组简单的机械装置向制动器施加作用力,那时的车辆质量比较小,速度比较低,机械制动虽已满足车辆制动的需要,但随着汽车自身质量的增加,助力装置对机械制动器来说已显得十分必要。
这时,开始出现真空助力装置。
1932年生产的质量生产的质量为2860kg的凯迪拉克V16车四轮采用直径419.1mm的鼓式制动器,并有制动踏板控制的真空助力装置。
林肯公司也于1932年推出V12轿车,该车采用通过四根软索控制真空加力器的鼓式制动器。
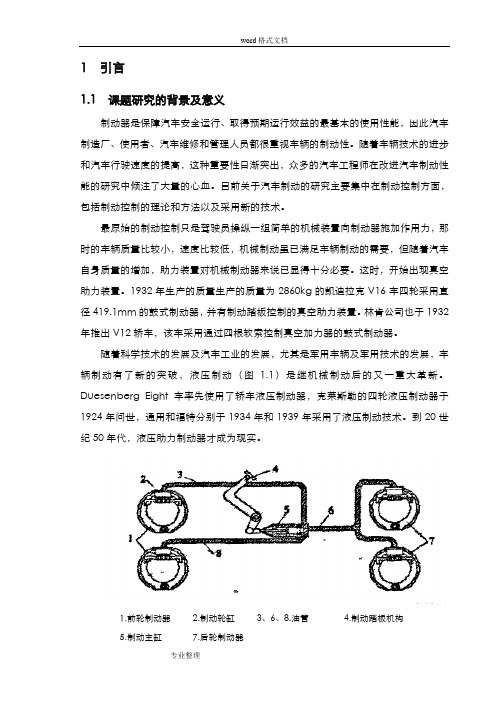
随着科学技术的发展及汽车工业的发展,尤其是军用车辆及军用技术的发展,车辆制动有了新的突破,液压制动(图1.1)是继机械制动后的又一重大革新。
Duesenberg Eight车率先使用了轿车液压制动器,克莱斯勒的四轮液压制动器于1924年问世,通用和福特分别于1934年和1939年采用了液压制动技术。
到20世纪50年代,液压助力制动器才成为现实。
1.前轮制动器2.制动轮缸3、6、8.油管 4.制动踏板机构5.制动主缸7.后轮制动器图1.1在液压鼓式制动器出现的若干年后,人们又发明了液压钳盘式制动器,盘式制动器又称为碟式制动器,顾名思义,是取其形状而得名。
由液压控制,主要零部件有制动盘、分泵、制动钳、油管等。
制动盘用合金钢制造并固定在车轮上,随车轮转动。
分泵固定在制动器的底板上固定不动。
制动卡钳上的两个摩擦片分别装在制动盘的两侧。
20世纪80年代后期,随着电子技术的发展,世界汽车技术领域最显著的成就就是防抱制动系统(ABS)的实用和推广。
KTC828-v2说明书
改张力设定值,按AUTO/MAN键可切换到手动控制模式。 控制器处于停止运行状态时,AUTO指示灯闪烁。
当控制器工作在手动控制模式时,手动控制指示灯(MAN)点亮,可旋转数值设定旋钮或按递增键/递减键直接 修改输出功率值,按AUTO/MAN键可切换到自动控制模式。
13. Set, 确认键 14. Esc, 取消键 15.▲, 递增键 16.▼, 递减键
9. OUTA, A轴输出指示灯 10. OUTB, B轴输出指示灯 11. ALM, 张力报警指示灯 12. COM, 通讯指示灯
.1 Set/Esc 键: 用这两个键可以进行各种菜单的选择或设定的确认。
Set键: 进入下级菜单或确认执行。 Esc键: 返回上级菜单或确认返回。
1
TENSION CONTROLLER KTC828
第一章 产品概述
1.1 概述
KTC828张力控制器采用图形液晶显示器,可选择中、英文显示,界面友好易用,可输出0~24V/4A 直接驱动磁 粉离合器,磁粉制动器,也可以输出0~5V,0~10V 信号,控制变频器,伺服电机或其它执行机构,对卷料系统进 行高精度的张力控制。可广泛应用于造纸、印刷、包装、纺织印染等行业。
*[1]控制器参数,[]里的数字表示参数序号,所有的参数都以该形式表示。
2
TENSION CONTROLLER KTC828
1.3 操作界面及操作简介
22. LED显示器 21. LED显示指示灯 20. LED显示切换键
2 3 .电 源 指 示 灯 24.电 源 开 关
磁粉制动器
磁粉制动器的用途,磁粉制动器工作原理磁粉制动器的用途,磁粉制动器工作原理磁粉制动器特性、用途是什么?磁粉制动器、磁粉离合器是一种性能优越的自动控制元件。
它以磁粉为工作介质,以激磁电流为控制手段,达到控制制动转矩或传递转矩的目的。
其输出转矩与激磁电流呈良好的线性关系,而与转速或滑差无关,并具有响应速度快、结构简单等优点。
用于张力自动控制系统。
磁粉制动器、磁粉离合器与自动张力控制仪及张力检测传感器配套,可组成自动闭环张力控制系统,广泛应用于印刷、包装、造纸及纸品加工、纺织、玻璃纤维、电线电缆橡胶皮革、金属箔带加工等设备。
用于转矩转速功率测试系统。
磁粉制动器、磁粉离合器与转矩转速传感器、转矩转速功率测量仪配套,可组成成套转矩转速功率测试系统,广泛应用于动力机械、传动机械输入、输出的转矩、转速、功率、效率的动态和静态的检测磁粉离合器还用于缓冲起动、过载保护、调速等。
磁粉制动器工作原理磁粉制动器是根据电磁原理和利用磁粉传递转矩的。
其具有激磁电流和传递转矩基本成线性关系的特点。
在同滑差无关的情况下能够传递一定的转矩,具有响应速度快、结构简单、无污染、无噪音、无冲击振动节约能源等优点。
是一种多用途、性能优越的自动控制元件。
现已被广泛应用于造纸、印刷、塑料、橡胶、纺织、印染、电线电缆、冶金、压片机以及其他有关卷取加工行业中的放卷和收卷张力控制。
磁粉制动器还经常被用于传动机械的测功加载和制动等。
磁粉制动器和磁粉离合器经常配对使用。
单轴磁粉制动器磁粉制动器用途:1、缓冲起动,停止用:利用连结时的圆滑特性及定转矩特性达到缓冲起动和停止。
2、连续滑动、张力控制用3、转矩限制器用4、高速应答用5、动力吸收用6、定位停止用7、模拟负载用磁粉制动器具有以下几大特点:1、可以轻松进行大范围的控制。
2、可以达到连续滑动运转。
3、可以得到安定的扭力。
4、无鸣叫音。
动作面的滞滑现象会发生于摩擦方式,但是在此不会出现,而且也不会发出连结音,所以运转相当安静。
磁粉离合器制动器使用说明书
磁粉离合器制动器使用说明书瑞安市胜达控制器有限公司(原瑞安市胜达控制器厂)成立于1995年,坐落于全国三大包装机械基地之一的瑞安市。
公司始终坚持以“专业、优质、高效”为企业的经营理念。
二十多年专注于磁粉离合器、磁粉制动器、张力控制器和气胀轴等系列产品,拥有完善的质量管理体系,先进的实验验证手段,完美的产品品质追求。
公司产品结构合理、造型美观、性能优越、质量可靠。
以瑞安产业基地为依托,产品广泛配套应用于印刷机、涂布机、复合机等包装机械。
玉鸽品牌,深受广大用户好评。
一、 工作原理及应用范围磁粉离合器是传动单元(输入轴)和从动单元(输出轴)由轴承支承同心安装于壳体上,壳体(磁轭)内装有线圈,两单元之间的工作间隙填有耐磨且具有高导磁率的磁粉。
当线圈不通电时,传动单元与从动单元之间不传递力矩。
但如将线圈通电,随即在工作间隙中形成一个垂直方向的磁场,磁粉在转动瞬间沿磁通连接成链状,在两单元的工作表面之间相互作用,产生切向摩擦力,从而传递力矩。
常用于收卷。
磁粉制动器的原理与磁粉离合器相同,其中的从动单元与壳体相连固定,故无输出轴,常用于放卷。
由于以上特点,现已被广泛应用于造纸、印刷、塑料、橡胶、纺织、印染、电线电缆、冶金以及其他有关卷取加工行业中的放卷和收卷张力控制。
另外,磁粉离合器还可用于缓冲启动、过载保护、调速等。
磁粉制动器还经常被用于传动机械的测功加载和制动等。
二、 型号规格及结构双轴系列磁粉离合器结构图F L100A- 1 S附加功能:S 水冷型,F 强制风冷型,自然冷却不标注A-1伸出轴式,A-4伸出轴同侧K-3孔式,B-1孔式。
公称转矩:6,12,25,50,100,200,400,N.mF 磁粉 L 离合器,Z 制动器。
孔式系列磁粉离合器结构图单轴系列磁粉离合器结构图单轴系列磁粉制动器结构图孔式系列磁粉离合器结构图三、 性能特性1、静特性:即励磁电流与转矩关系的特性,传动单元转速为常数,从动单元制动,激励电流单向由小到大,再由大到小变化所得励磁电流与转矩的关系曲线,如图。
CZLK型张力控制器使用说明书
九、注意事项:1.交流220V电压不可接到其他端子上,否则会烧毁控制器。
空的端子不可接线,否则将烧毁张力控制器。
信号线要用屏蔽线,且屏蔽层要可靠单端接地。
信号线尽量避免与强电控制线缆长距离平行走线以及捆扎在一起,以免引起干扰,使控制器无法正常工作。
2.端子3为保护地,必须可靠接地。
执行三类接地。
3.功率输出最大为DC24V 1A,2A,3A,信号输出为DC0-10V 10mA,使用时注意容量。
4.简易PLC控制端子接常开型触点开关,不可接自锁开关,否则会造成张力控制器工作异常,产生不可预知的故障。
5.不要将张力控制器用在易燃易爆的气体中,不然会引起火灾或爆炸。
6.不要将张力控制器安装在有灰尘、导电尘埃、腐蚀性气体或高温、寒冷、振动及冲击的场所,否则可能会导致控制器损坏、失灵或性能下降。
7.操作前请仔细阅读本说明书,务必准确理解,切莫带疑操作,否则会损坏控制器。
TCK-1型张力控制器使用说明书江苏常州中驰电器设备有限公司* 11 *TCK-1张力控制器使用说明书一. 特点TCK-1张力控制器是一种根据计算卷径控制张力的开环型半自动张力控制器。
通过检测传感器送来的信号由微机自动进行计算,得出设备工作时张力的变化曲线,实时输出控制信号,实现对各类生产、加工带材和线材等产品的设备上收、放卷张力控制,广泛应用于包装、冶金、印刷、造纸、纺织、橡胶塑料、线材拉丝等各种行业的各类设备。
张力控制器可控制力矩电机控制器等驱动装置也可直接驱动磁粉制动器/磁粉离合器等执行装置。
二.主要技术参数1.电源电压:AC220V±10%,50Hz2.传感器信号:NPN输出型接近开关等3.输入脉冲响应频率:≤1KHz4.输出:控制输出:DC0V~DC10V ≤10mA功率输出:DC24V 1A 2A 3A可选5.供外部传感器电源:+12V ≤50mA6.简易PLC控制输入三.使用环境:1.海拔高度:<1000M2.环境温度:0~45℃环境要求:无腐蚀性气体3.相对湿度:<85% 八、异常检查:如设为“P110”,直到收卷起止,张力均满足为止。
磁粉制动器

磁粉制动器的用途,磁粉制动器工作原理磁粉制动器的用途,磁粉制动器工作原理磁粉制动器特性、用途是什么?磁粉制动器、磁粉离合器是一种性能优越的自动控制元件。
它以磁粉为工作介质,以激磁电流为控制手段,达到控制制动转矩或传递转矩的目的。
其输出转矩与激磁电流呈良好的线性关系,而与转速或滑差无关,并具有响应速度快、结构简单等优点。
用于张力自动控制系统。
磁粉制动器、磁粉离合器与自动张力控制仪及张力检测传感器配套,可组成自动闭环张力控制系统,广泛应用于印刷、包装、造纸及纸品加工、纺织、玻璃纤维、电线电缆橡胶皮革、金属箔带加工等设备。
用于转矩转速功率测试系统。
磁粉制动器、磁粉离合器与转矩转速传感器、转矩转速功率测量仪配套,可组成成套转矩转速功率测试系统,广泛应用于动力机械、传动机械输入、输出的转矩、转速、功率、效率的动态和静态的检测磁粉离合器还用于缓冲起动、过载保护、调速等。
磁粉制动器工作原理磁粉制动器是根据电磁原理和利用磁粉传递转矩的。
其具有激磁电流和传递转矩基本成线性关系的特点。
在同滑差无关的情况下能够传递一定的转矩,具有响应速度快、结构简单、无污染、无噪音、无冲击振动节约能源等优点。
是一种多用途、性能优越的自动控制元件。
现已被广泛应用于造纸、印刷、塑料、橡胶、纺织、印染、电线电缆、冶金、压片机以及其他有关卷取加工行业中的放卷和收卷张力控制。
磁粉制动器还经常被用于传动机械的测功加载和制动等。
磁粉制动器和磁粉离合器经常配对使用。
单轴磁粉制动器磁粉制动器用途:1、缓冲起动,停止用:利用连结时的圆滑特性及定转矩特性达到缓冲起动和停止。
2、连续滑动、张力控制用3、转矩限制器用4、高速应答用5、动力吸收用6、定位停止用7、模拟负载用磁粉制动器具有以下几大特点:1、可以轻松进行大范围的控制。
2、可以达到连续滑动运转。
3、可以得到安定的扭力。
4、无鸣叫音。
动作面的滞滑现象会发生于摩擦方式,但是在此不会出现,而且也不会发出连结音,所以运转相当安静。
DY-6001 测功机控制器 使用说明书
DY-6001测功机控制器使用说明书蚌埠大洋传感系统工程有限公司目录一、主要功能及特点 (1)二、技术指标 (1)三、外壳尺寸与开孔尺寸 (1)四、外观介绍 (2)1.前面板 (2)2.前面板 (2)3.主显示界面 (3)4.参数设置界面 (3)5.PID整定界面 (3)五、仪表操作说明 (3)1.修改参数 (3)2.扭矩单位切换 (3)3.手动测试模式 (3)4.自动测试模式 (4)5.上位机测试模式 (4)6.复位模式 (4)7.PID参数整定 (4)六、参数说明 (4)1.扭矩通道 (4)2.扭矩量程 (4)3.扭矩系数 (4)4.扭矩小数点 (4)5.转速模式 (4)6.控制模式 (5)7.扭矩设定值0 (5)8.扭矩设定值1 (5)9.扭矩设定值2 (5)10.扭矩1测试时间 (5)11.扭矩2测试时间 (5)12.测试时间单位 (5)13.PID开始转速 (5)14.PID结束转速 (5)15.扭矩报警值 (5)16.转速报警值 (5)17.电流分度值 (5)18.转速小数点 (6)七、自动控制模式图 (6)八、参数表 (6)九、串口通信说明 (7)十、测功机接口说明 (7)十一、励磁输出接口说明 (8)十二、电机控制接口说明 (8)十三、电流输出说明 (8)十四、测功机扭矩校准说明 (9)十五、设备连接说明 (9)十六、装箱清单 (9)概述DY-6001测功机控制器是一种可以对多种扭矩传感器信号和测功机信号进行采样和处理,同时可控制磁粉磁滞制动器。
并将其信号传输至上位机。
其工作原理是将测功机传入的扭矩信号经过高精度ADC转换后,进行运算处理得到真实扭矩值。
再将转速传感器回传的信号经过处理得出实际转速值。
将两组数据进行运算后得出输出功率的大小,并将这三组数据送至显示器显示。
同时将当前数据传输至上位机进行曲线与表格绘制。
一、主要功能及特点●将当前测量的扭矩值与转速值实时显示。
●可以直接计算出当前功率值并显示。
磁粉制动器的模糊神经元PID控制
磁粉制动器的模糊神经元PID控制金昊;白国振;朱灵康;杨雷【摘要】针对磁粉制动器扭矩加载系统的非线性和不确定性问题,提出了一种模糊单神经元复合智能控制的方法.通过单神经元学习算法进行参数自整定,实现单神经元控制器输出增益的实时调节.结合仿真及扭矩加载实验进行验证和比较,结果表明,基于模糊单神经元PID控制器能有效地改善磁粉制动器加载控制性能.【期刊名称】《电子科技》【年(卷),期】2017(030)007【总页数】4页(P40-43)【关键词】磁粉制动器;扭矩加载;智能控制;单神经元控制器;模糊神经元【作者】金昊;白国振;朱灵康;杨雷【作者单位】上海理工大学机械工程学院,上海200093;上海理工大学机械工程学院,上海200093;上海理工大学机械工程学院,上海200093;上海理工大学机械工程学院,上海200093【正文语种】中文【中图分类】TP273常规的PID 控制不仅需要被控对象的精确数学模型,且控制参数无法实时调节,因而对一些时变性、非线性、不确定性的复杂对象的控制效果欠佳,无法满足工程需要。
为此,本文提出采用单神经元自适应PID控制器来代替常规的增量式 PID 控制器,以改善控制性能。
并在改进单神经元控制器学习算法的基础上引入了模糊控制技术,用以实现单神经元控制器输出比例系数的自整定,从而进一步提升单神经元PID控制器的性能[1]。
1.1 单神经元自适应PID控制器单神经元PID控制器是一种结构简单的自适应智能控制器,它具有权值学习快速、计算量小、易于实现的优点,而且能适应外部环境变化,具有较强的鲁棒性[2]。
单神经元自适应控制器的控制原理,是通过良好的学习算法对加权系数进行调整,以此来实现自适应、自组织的功能。
其加权权系数的学习规则多种多样,常见的有无监督Hebb学习规则、有监督Delta学习规则以及有监督的Hebb学习规则。
其控制算法及按有监督的Hebb学习规则实现的学习算法为[3]式中,x(k)=e(k);x(k)=e(k)-e(k-1);x(k)=e(k)-2e(k-1)+e(k-2);z(k)=e(k);ηI,ηP,ηD分别为积分、比例、微分的学习速率,K为神经元的比例系数,K>0。
磁粉制动器加载性能试验研究
8""
$IL$
##I8
%I8
88"
$I;L
##I9
%I9
L""
$I9%
##I8
%I8
L8"
$I$&
##I9
%I!
;""
$I$8
##IL
%I%
;8"
$I$L
##I8
%I&
DD由表 # 可以看出+电机转速会影响磁粉制动器的 输出扭矩"但是不影响其响应时间$电机在不同的转速 下"磁粉制动器的响应时间相同"即转动轴的转速对磁 粉制动器的响应时间没有影响& 对比扭矩输出响应上
#'
!""#$ %%&'()*+,1-./.+*10/(11*
罗一闽等磁粉制动器加载性能试验研究
必要对磁粉制动器加载性能进行试验研究
+<磁粉制动器结构及工作原理
磁粉制动器应用电磁原理和莫尔库仑原理利用 磁粉链之间的相互作用力以及摩擦传递输出扭矩是 一种能够实现精确控制的自动控制元件应用在制动 及小功率加载的控制系统中 磁粉制动器主要由传动 体 旋转体 从动体 静止体 励磁线圈 静止体 从 动体轴 旋转体 轴承等组成; C9 磁粉制动器的转 动部件和从动部件之间存在着大量的磁粉磁粉为体 积小并经过强磁化的金属粒子该金属粒子耐磨损性 能好利用金属粒子之间的相互作用传递扭矩$ C#" 磁粉制动器实物如图 # 所示
压加载以及磁粉制动器加载等& 其中纯机械加载大多 数应用在自动化程度不高的场所"电机控制加载和液 压加载应用在加载力大%控制精度不够精密的场所"对 精密加 载 系 统 中 则 需 要 使 用 磁 粉 制 动 器 进 行 加 载 试验'#( &