A Novel Genetic Algorithm for Stable Multicast Routing in Mobile Ad Hoc Networks
遗传算法(英文原文)
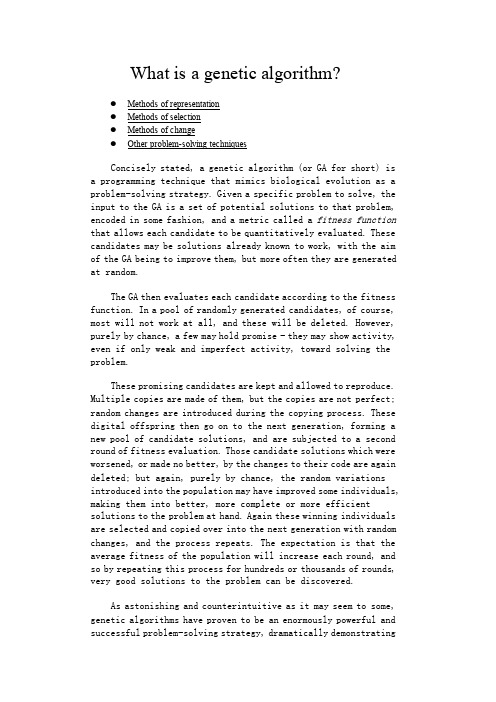
What is a genetic algorithm?●Methods of representation●Methods of selection●Methods of change●Other problem-solving techniquesConcisely stated, a genetic algorithm (or GA for short) is a programming technique that mimics biological evolution as a problem-solving strategy. Given a specific problem to solve, the input to the GA is a set of potential solutions to that problem, encoded in some fashion, and a metric called a fitness function that allows each candidate to be quantitatively evaluated. These candidates may be solutions already known to work, with the aim of the GA being to improve them, but more often they are generated at random.The GA then evaluates each candidate according to the fitness function. In a pool of randomly generated candidates, of course, most will not work at all, and these will be deleted. However, purely by chance, a few may hold promise - they may show activity, even if only weak and imperfect activity, toward solving the problem.These promising candidates are kept and allowed to reproduce. Multiple copies are made of them, but the copies are not perfect; random changes are introduced during the copying process. These digital offspring then go on to the next generation, forming a new pool of candidate solutions, and are subjected to a second round of fitness evaluation. Those candidate solutions which were worsened, or made no better, by the changes to their code are again deleted; but again, purely by chance, the random variations introduced into the population may have improved some individuals, making them into better, more complete or more efficient solutions to the problem at hand. Again these winning individuals are selected and copied over into the next generation with random changes, and the process repeats. The expectation is that the average fitness of the population will increase each round, and so by repeating this process for hundreds or thousands of rounds, very good solutions to the problem can be discovered.As astonishing and counterintuitive as it may seem to some, genetic algorithms have proven to be an enormously powerful and successful problem-solving strategy, dramatically demonstratingthe power of evolutionary principles. Genetic algorithms have been used in a wide variety of fields to evolve solutions to problems as difficult as or more difficult than those faced by human designers. Moreover, the solutions they come up with are often more efficient, more elegant, or more complex than anything comparable a human engineer would produce. In some cases, genetic algorithms have come up with solutions that baffle the programmers who wrote the algorithms in the first place!Methods of representationBefore a genetic algorithm can be put to work on any problem, a method is needed to encode potential solutions to that problem in a form that a computer can process. One common approach is to encode solutions as binary strings: sequences of 1's and 0's, where the digit at each position represents the value of some aspect of the solution. Another, similar approach is to encode solutions as arrays of integers or decimal numbers, with each position again representing some particular aspect of the solution. This approach allows for greater precision and complexity than the comparatively restricted method of using binary numbers only and often "is intuitively closer to the problem space" (Fleming and Purshouse 2002, p. 1228).This technique was used, for example, in the work of Steffen Schulze-Kremer, who wrote a genetic algorithm to predict the three-dimensional structure of a protein based on the sequence of amino acids that go into it (Mitchell 1996, p. 62). Schulze-Kremer's GA used real-valued numbers to represent the so-called "torsion angles" between the peptide bonds that connect amino acids. (A protein is made up of a sequence of basic building blocks called amino acids, which are joined together like the links in a chain. Once all the amino acids are linked, the protein folds up into a complex three-dimensional shape based on which amino acids attract each other and which ones repel each other. The shape of a protein determines its function.) Genetic algorithms for training neural networks often use this method of encoding also.A third approach is to represent individuals in a GA as strings of letters, where each letter again stands for a specific aspect of the solution. One example of this technique is Hiroaki Kitano's "grammatical encoding" approach, where a GA was put to the task of evolving a simple set of rules called a context-freegrammar that was in turn used to generate neural networks for a variety of problems (Mitchell 1996, p. 74).The virtue of all three of these methods is that they make it easy to define operators that cause the random changes in the selected candidates: flip a 0 to a 1 or vice versa, add or subtract from the value of a number by a randomly chosen amount, or change one letter to another. (See the section on Methods of change for more detail about the genetic operators.) Another strategy, developed principally by John Koza of Stanford University and called genetic programming, represents programs as branching data structures called trees (Koza et al. 2003, p. 35). In this approach, random changes can be brought about by changing the operator or altering the value at a given node in the tree, or replacing one subtree with another.Figure 1:Three simple program trees of the kind normally used in genetic programming. The mathematical expression that each one represents is given underneath.It is important to note that evolutionary algorithms do not need to represent candidate solutions as data strings of fixed length. Some do represent them in this way, but others do not; for example, Kitano's grammatical encoding discussed above can be efficiently scaled to create large and complex neural networks, and Koza's genetic programming trees can grow arbitrarily large as necessary to solve whatever problem they are applied to.Methods of selectionThere are many different techniques which a genetic algorithm can use to select the individuals to be copied over into the next generation, but listed below are some of the most common methods.Some of these methods are mutually exclusive, but others can be and often are used in combination.Elitist selection: The most fit members of each generation are guaranteed to be selected. (Most GAs do not use pure elitism, but instead use a modified form where the single best, or a few of the best, individuals from each generation are copied into the next generation just in case nothing better turns up.)Fitness-proportionate selection: More fit individuals are more likely, but not certain, to be selected.Roulette-wheel selection: A form of fitness-proportionate selection in which the chance of an individual's being selected is proportional to the amount by which its fitness is greater or less than its competitors' fitness. (Conceptually, this can be represented as a game of roulette - each individual gets a slice of the wheel, but more fit ones get larger slices than less fit ones. The wheel is then spun, and whichever individual "owns" the section on which it lands each time is chosen.)Scaling selection: As the average fitness of the population increases, the strength of the selective pressure also increases and the fitness function becomes more discriminating. This method can be helpful in making the best selection later on when all individuals have relatively high fitness and only small differences in fitness distinguish one from another.Tournament selection: Subgroups of individuals are chosen from the larger population, and members of each subgroup compete against each other. Only one individual from each subgroup is chosen to reproduce.Rank selection: Each individual in the population is assigned a numerical rank based on fitness, and selection is based on this ranking rather than absolute differences in fitness. The advantage of this method is that it can prevent very fit individuals from gaining dominance early at the expense of less fit ones, which would reduce the population's genetic diversity and might hinder attempts to find an acceptable solution.Generational selection: The offspring of the individuals selected from each generation become the entire next generation. No individuals are retained between generations.Steady-state selection: The offspring of the individuals selected from each generation go back into the pre-existing gene pool, replacing some of the less fit members of the previous generation. Some individuals are retained between generations.Hierarchical selection: Individuals go through multiple rounds of selection each generation. Lower-level evaluations are faster and less discriminating, while those that survive to higher levels are evaluated more rigorously. The advantage of this method is that it reduces overall computation time by using faster, less selective evaluation to weed out the majority of individuals that show little or no promise, and only subjecting those who survive this initial test to more rigorous and more computationally expensive fitness evaluation.Methods of changeOnce selection has chosen fit individuals, they must be randomly altered in hopes of improving their fitness for the next generation. There are two basic strategies to accomplish this. The first and simplest is called mutation. Just as mutation in living things changes one gene to another, so mutation in a genetic algorithm causes small alterations at single points in an individual's code.The second method is called crossover, and entails choosing two individuals to swap segments of their code, producing artificial "offspring" that are combinations of their parents. This process is intended to simulate the analogous process of recombination that occurs to chromosomes during sexual reproduction. Common forms of crossover include single-point crossover, in which a point of exchange is set at a random location in the two individuals' genomes, and one individual contributes all its code from before that point and the other contributes all its code from after that point to produce an offspring, and uniform crossover, in which the value at any given location in the offspring's genome is either the value of one parent's genome at that location or the value of the other parent's genome at that location, chosen with 50/50 probability.Figure 2:Crossover and mutation. The above diagrams illustrate the effect of each of these genetic operators on individuals in a population of 8-bit strings. The upper diagram shows two individuals undergoing single-point crossover; the point of exchange is set between the fifth and sixth positions in the genome, producing a new individual that is a hybrid of its progenitors. The second diagram shows an individual undergoing mutation at position 4, changing the 0 at that position in its genome to a 1.Other problem-solving techniquesWith the rise of artificial life computing and the development of heuristic methods, other computerizedproblem-solving techniques have emerged that are in some ways similar to genetic algorithms. This section explains some of these techniques, in what ways they resemble GAs and in what ways they differ.Neural networksA neural network, or neural net for short, is a problem-solving method basedon a computer model of how neurons are connected in the brain. A neuralnetwork consists of layers of processing units called nodes joined bydirectional links: one input layer, one output layer, and zero or more hiddenlayers in between. An initial pattern of input is presented to the input layer ofthe neural network, and nodes that are stimulated then transmit a signal to thenodes of the next layer to which they are connected. If the sum of all theinputs entering one of these virtual neurons is higher than that neuron'sso-called activation threshold, that neuron itself activates, and passes on itsown signal to neurons in the next layer. The pattern of activation thereforespreads forward until it reaches the output layer and is there returned as asolution to the presented input. Just as in the nervous system of biologicalorganisms, neural networks learn and fine-tune their performance over timevia repeated rounds of adjusting their thresholds until the actual outputmatches the desired output for any given input. This process can be supervisedby a human experimenter or may run automatically using a learning algorithm(Mitchell 1996, p. 52). Genetic algorithms have been used both to build and totrain neural networks.Figure 3:A simple feedforward neural network, with one input layer consisting of four neurons, one hidden layer consisting of three neurons, and one output layer consisting of four neurons. The number on each neuron represents its activation threshold: it will only fire if it receives at least that many inputs. The diagram shows the neural network being presented with an input string and shows how activation spreads forward through thenetwork to produce an output.Hill-climbingSimilar to genetic algorithms, though more systematic and less random, ahill-climbing algorithm begins with one initial solution to the problem at hand, usually chosen at random. The string is then mutated, and if the mutationresults in higher fitness for the new solution than for the previous one, thenew solution is kept; otherwise, the current solution is retained. The algorithmis then repeated until no mutation can be found that causes an increase in thecurrent solution's fitness, and this solution is returned as the result (Koza et al.2003, p. 59). (To understand where the name of this technique comes from,imagine that the space of all possible solutions to a given problem isrepresented as a three-dimensional contour landscape. A given set ofcoordinates on that landscape represents one particular solution. Thosesolutions that are better are higher in altitude, forming hills and peaks; thosethat are worse are lower in altitude, forming valleys. A "hill-climber" is thenan algorithm that starts out at a given point on the landscape and movesinexorably uphill.) Hill-climbing is what is known as a greedy algorithm,meaning it always makes the best choice available at each step in the hopethat the overall best result can be achieved this way. By contrast, methodssuch as genetic algorithms and simulated annealing, discussed below, are notgreedy; these methods sometimes make suboptimal choices in the hopes thatthey will lead to better solutions later on.Simulated annealingAnother optimization technique similar to evolutionary algorithms is known as simulated annealing. The idea borrows its name from the industrial process of annealing in which a material is heated to above a critical point to soften it, then gradually cooled in order to erase defects in its crystalline structure, producing a more stable and regular lattice arrangement of atoms (Haupt and Haupt 1998, p. 16). In simulated annealing, as in genetic algorithms, there is a fitness function that defines a fitness landscape; however, rather than a population of candidates as in GAs, there is only one candidate solution.Simulated annealing also adds the concept of "temperature", a global numerical quantity which gradually decreases over time. At each step of the algorithm, the solution mutates (which is equivalent to moving to an adjacent point of the fitness landscape). The fitness of the new solution is then compared to the fitness of the previous solution; if it is higher, the new solution is kept. Otherwise, the algorithm makes a decision whether to keep or discard it based on temperature. If the temperature is high, as it is initially, even changes that cause significant decreases in fitness may be kept and used as the basis for the next round of the algorithm, but as temperature decreases, the algorithm becomes more and more inclined to only accept fitness-increasing changes. Finally, the temperature reaches zero and the system "freezes"; whatever configuration it is in at that point becomes the solution. Simulated annealing is often used for engineering design applications such as determining the physical layout of components on a computer chip (Kirkpatrick, Gelatt and V ecchi 1983).。
遗传算法的发展历程
遗传算法的发展历程遗传算法(Genetic Algorithm, GA)是近年来迅速发展起来的一种全新的随机搜索与优化算法,其基本思想是基于Darw in的进化论和Mendel的遗传学说。
该算法由密执安大学教授Holland及其学生于1975年创建。
此后,遗传算法的研究引起了国内外学者的关注。
遗传算法(Genetic Algorithm)是一类借鉴生物界的进化规律(适者生存,优胜劣汰遗传机制)演化而来的随机化搜索方法。
其主要特点是直接对结构对象进行操作,不存在求导和函数连续性的限定;具有内在的隐并行性和更好的全局寻优能力;采用概率化的寻优方法,能自动获取和指导优化的搜索空间,自适应地调整搜索方向,不需要确定的规则。
遗传算法的这些性质,已被人们广泛地应用于组合优化、机器学习、信号处理、自适应控制和人工生命等领域。
它是现代有关智能计算中的关键技术。
遗传算法的基本运算过程如下:a)初始化:设置进化代数计数器t=0,设置最大进化代数T,随机生成M个个体作为初始群体P(0)。
b)个体评价:计算群体P(t)中各个个体的适应度。
c)选择运算:将选择算子作用于群体。
选择的目的是把优化的个体直接遗传到下一代或通过配对交叉产生新的个体再遗传到下一代。
选择操作是建立在群体中个体的适应度评估基础上的。
d)交叉运算;将交叉算子作用于群体。
所谓交叉是指把两个父代个体的部分结构加以替换重组而生成新个体的操作。
遗传算法中起核心作用的就是交叉算子。
e)变异运算:将变异算子作用于群体。
即是对群体中的个体串的某些基因座上的基因值作变动。
群体P(t)经过选择、交叉、变异运算之后得到下一代群体P(t 1)。
f)终止条件判断:若tT,则以进化过程中所得到的具有最大适应度个体作为最优解输出,终止计算。
1967年,Holland的学生J.D.Bagley在博士论文中首次提出“遗传算法(Genetic Algorithms)”一词。
此后,Holland指导学生完成了多篇有关遗传算法研究的论文。
遗传算法中英文对照外文翻译文献
遗传算法中英文对照外文翻译文献遗传算法中英文对照外文翻译文献(文档含英文原文和中文翻译)Improved Genetic Algorithm and Its Performance AnalysisAbstract: Although genetic algorithm has become very famous with its global searching, parallel computing, better robustness, and not needing differential information during evolution. However, it also has some demerits, such as slow convergence speed. In this paper, based on several general theorems, an improved genetic algorithm using variant chromosome length and probability of crossover and mutation is proposed, and its main idea is as follows : at the beginning of evolution, our solution with shorter length chromosome and higher probability of crossover and mutation; and at the vicinity of global optimum, with longer length chromosome and lower probability of crossover and mutation. Finally, testing with some critical functions shows that our solution can improve the convergence speed of genetic algorithm significantly , its comprehensive performance is better than that of the genetic algorithm which only reserves the best individual.Genetic algorithm is an adaptive searching technique based on a selection and reproduction mechanism found in the natural evolution process, and it was pioneered by Holland in the 1970s. It has become very famous with its global searching,________________________________ 遗传算法中英文对照外文翻译文献 ________________________________ parallel computing, better robustness, and not needing differential information during evolution. However, it also has some demerits, such as poor local searching, premature converging, as well as slow convergence speed. In recent years, these problems have been studied.In this paper, an improved genetic algorithm with variant chromosome length andvariant probability is proposed. Testing with some critical functions shows that it can improve the convergence speed significantly, and its comprehensive performance is better than that of the genetic algorithm which only reserves the best individual.In section 1, our new approach is proposed. Through optimization examples, insection 2, the efficiency of our algorithm is compared with the genetic algorithm which only reserves the best individual. And section 3 gives out the conclusions. Finally, some proofs of relative theorems are collected and presented in appendix.1 Description of the algorithm1.1 Some theoremsBefore proposing our approach, we give out some general theorems (see appendix)as follows: Let us assume there is just one variable (multivariable can be divided into many sections, one section for one variable) x £ [ a, b ] , x £ R, and chromosome length with binary encoding is 1.Theorem 1 Minimal resolution of chromosome isb 一 a2l — 1Theorem 3 Mathematical expectation Ec(x) of chromosome searching stepwith one-point crossover iswhere Pc is the probability of crossover.Theorem 4 Mathematical expectation Em ( x ) of chromosome searching step with bit mutation isE m ( x ) = ( b- a) P m 遗传算法中英文对照外文翻译文献Theorem 2 wi = 2l -1 2 i -1 Weight value of the ith bit of chromosome is(i = 1,2,・・・l )E *)= P c1.2 Mechanism of algorithmDuring evolutionary process, we presume that value domains of variable are fixed, and the probability of crossover is a constant, so from Theorem 1 and 3, we know that the longer chromosome length is, the smaller searching step of chromosome, and the higher resolution; and vice versa. Meanwhile, crossover probability is in direct proportion to searching step. From Theorem 4, changing the length of chromosome does not affect searching step of mutation, while mutation probability is also in direct proportion to searching step.At the beginning of evolution, shorter length chromosome( can be too shorter, otherwise it is harmful to population diversity ) and higher probability of crossover and mutation increases searching step, which can carry out greater domain searching, and avoid falling into local optimum. While at the vicinity of global optimum, longer length chromosome and lower probability of crossover and mutation will decrease searching step, and longer length chromosome also improves resolution of mutation, which avoid wandering near the global optimum, and speeds up algorithm converging.Finally, it should be pointed out that chromosome length changing keeps individual fitness unchanged, hence it does not affect select ion ( with roulette wheel selection) .2.3 Description of the algorithmOwing to basic genetic algorithm not converging on the global optimum, while the genetic algorithm which reserves the best individual at current generation can, our approach adopts this policy. During evolutionary process, we track cumulative average of individual average fitness up to current generation. It is written as1 X G x(t)= G f vg (t)t=1where G is the current evolutionary generation, 'avg is individual average fitness.When the cumulative average fitness increases to k times ( k> 1, k £ R) of initial individual average fitness, we change chromosome length to m times ( m is a positive integer ) of itself , and reduce probability of crossover and mutation, which_______________________________ 遗传算法中英文对照外文翻译文献________________________________can improve individual resolution and reduce searching step, and speed up algorithm converging. The procedure is as follows:Step 1 Initialize population, and calculate individual average fitness f avg0, and set change parameter flag. Flag equal to 1.Step 2 Based on reserving the best individual of current generation, carry out selection, regeneration, crossover and mutation, and calculate cumulative average of individual average fitness up to current generation 'avg ;f avgStep 3 If f vgg0 三k and Flag equals 1, increase chromosome length to m times of itself, and reduce probability of crossover and mutation, and set Flag equal to 0; otherwise continue evolving.Step 4 If end condition is satisfied, stop; otherwise go to Step 2.2 Test and analysisWe adopt the following two critical functions to test our approach, and compare it with the genetic algorithm which only reserves the best individual:sin 2 弋 x2 + y2 - 0.5 [1 + 0.01( 2 + y 2)]x, y G [-5,5]f (x, y) = 4 - (x2 + 2y2 - 0.3cos(3n x) - 0.4cos(4n y))x, y G [-1,1]22. 1 Analysis of convergenceDuring function testing, we carry out the following policies: roulette wheel select ion, one point crossover, bit mutation, and the size of population is 60, l is chromosome length, Pc and Pm are the probability of crossover and mutation respectively. And we randomly select four genetic algorithms reserving best individual with various fixed chromosome length and probability of crossover and mutation to compare with our approach. Tab. 1 gives the average converging generation in 100 tests.In our approach, we adopt initial parameter l0= 10, Pc0= 0.3, Pm0= 0.1 and k= 1.2, when changing parameter condition is satisfied, we adjust parameters to l= 30, Pc= 0.1, Pm= 0.01.From Tab. 1, we know that our approach improves convergence speed of genetic algorithm significantly and it accords with above analysis.2.2 Analysis of online and offline performanceQuantitative evaluation methods of genetic algorithm are proposed by Dejong, including online and offline performance. The former tests dynamic performance; and the latter evaluates convergence performance. To better analyze online and offline performance of testing function, w e multiply fitness of each individual by 10, and we give a curve of 4 000 and 1 000 generations for fl and f2, respectively.(a) onlineFig. 1 Online and offline performance of fl(a) online (b) onlineFig. 2 Online and offline performance of f2From Fig. 1 and Fig. 2, we know that online performance of our approach is just little worse than that of the fourth case, but it is much better than that of the second, third and fifth case, whose online performances are nearly the same. At the same time, offline performance of our approach is better than that of other four cases.3 ConclusionIn this paper, based on some general theorems, an improved genetic algorithmusing variant chromosome length and probability of crossover and mutation is proposed. Testing with some critical functions shows that it can improve convergence speed of genetic algorithm significantly, and its comprehensive performance is better than that of the genetic algorithm which only reserves the best individual.AppendixWith the supposed conditions of section 1, we know that the validation of Theorem 1 and Theorem 2 are obvious.Theorem 3 Mathematical expectation Ec(x) of chromosome searching step with one point crossover isb - a PEc(x) = 21 cwhere Pc is the probability of crossover.Proof As shown in Fig. A1, we assume that crossover happens on the kth locus, i. e. parent,s locus from k to l do not change, and genes on the locus from 1 to k are exchanged.During crossover, change probability of genes on the locus from 1 to k is 2 (“1” to “0” or “0” to “1”). So, after crossover, mathematical expectation of chromosome searching step on locus from 1 to k is1 chromosome is equal, namely l Pc. Therefore, after crossover, mathematical expectation of chromosome searching step isE (x ) = T 1 -• P • E (x ) c l c ckk =1Substituting Eq. ( A1) into Eq. ( A2) , we obtain 尸 11 b - a p b - a p • (b - a ) 1 E (x ) = T • P • — •• (2k -1) = 7c • • [(2z -1) ― l ] = ——— (1 一 )c l c 2 21 — 121 21 — 1 21 21 —1 k =1 lb - a _where l is large,-——-口 0, so E (x ) 口 -——P2l — 1 c 21 c 遗传算法中英文对照外文翻译文献 厂 / 、 T 1 T 1 b — a - 1E (x )="—w ="一• ---------- • 2 j -1 二 •ck2 j 2 21 -1 2j =1 j =1 Furthermore, probability of taking • (2k -1) place crossover on each locus ofFig. A1 One point crossoverTheorem 4 Mathematical expectation E m(")of chromosome searching step with bit mutation E m (x)—(b a)* P m, where Pm is the probability of mutation.Proof Mutation probability of genes on each locus of chromosome is equal, say Pm, therefore, mathematical expectation of mutation searching step is一i i - b —a b b- aE (x) = P w = P•—a«2i-1 = P•—a q2,-1)= (b- a) •m m i m 21 -1 m 2 i -1 mi=1 i=1一种新的改进遗传算法及其性能分析摘要:虽然遗传算法以其全局搜索、并行计算、更好的健壮性以及在进化过程中不需要求导而著称,但是它仍然有一定的缺陷,比如收敛速度慢。
遗传算法解释及代码(一看就懂)
遗传算法( GA , Genetic Algorithm ) ,也称进化算法。
遗传算法是受达尔文的进化论的启发,借鉴生物进化过程而提出的一种启发式搜索算法。
因此在介绍遗传算法前有必要简单的介绍生物进化知识。
一.进化论知识作为遗传算法生物背景的介绍,下面内容了解即可:种群(Population):生物的进化以群体的形式进行,这样的一个群体称为种群。
个体:组成种群的单个生物。
基因 ( Gene ) :一个遗传因子。
染色体 ( Chromosome ):包含一组的基因。
生存竞争,适者生存:对环境适应度高的、牛B的个体参与繁殖的机会比较多,后代就会越来越多。
适应度低的个体参与繁殖的机会比较少,后代就会越来越少。
遗传与变异:新个体会遗传父母双方各一部分的基因,同时有一定的概率发生基因变异。
简单说来就是:繁殖过程,会发生基因交叉( Crossover ) ,基因突变( Mutation ) ,适应度( Fitness )低的个体会被逐步淘汰,而适应度高的个体会越来越多。
那么经过N代的自然选择后,保存下来的个体都是适应度很高的,其中很可能包含史上产生的适应度最高的那个个体。
二.遗传算法思想借鉴生物进化论,遗传算法将要解决的问题模拟成一个生物进化的过程,通过复制、交叉、突变等操作产生下一代的解,并逐步淘汰掉适应度函数值低的解,增加适应度函数值高的解。
这样进化N代后就很有可能会进化出适应度函数值很高的个体。
举个例子,使用遗传算法解决“0-1背包问题”的思路:0-1背包的解可以编码为一串0-1字符串(0:不取,1:取);首先,随机产生M个0-1字符串,然后评价这些0-1字符串作为0-1背包问题的解的优劣;然后,随机选择一些字符串通过交叉、突变等操作产生下一代的M个字符串,而且较优的解被选中的概率要比较高。
这样经过G代的进化后就可能会产生出0-1背包问题的一个“近似最优解”。
编码:需要将问题的解编码成字符串的形式才能使用遗传算法。
遗传算法优化svm参数

遗传算法优化svm参数遗传算法是一种基于自然适应性进化理论的优化算法,它通过模拟自然界中的进化过程,通过遗传算子(交叉和变异操作)对个体进行进化和选择,以找到最优解决方案。
支持向量机(Support Vector Machine,SVM)是一种非常有效的分类算法,通过在数据集中找到最有代表性的样本点,构建超平面分离不同类别的样本。
优化SVM的参数可以提高分类的准确率和稳定性。
下面是使用遗传算法优化SVM参数的一般步骤:1. 确定优化目标:首先明确需要优化的SVM参数,如惩罚系数C、核函数类型和参数、松弛变量等,这些参数会影响模型的性能。
2. 设计基因编码:将待优化的参数映射为基因的编码形式,可以使用二进制、整数或浮点数编码。
例如,某个参数的取值范围为[0, 1],可以使用浮点数编码。
3. 初始化种群:随机生成初始的种群,每个个体都表示一个SVM参数的取值组合。
4. 适应度评估:使用训练集对每个个体进行评估,计算其在测试集上的准确率或其他指标作为个体的适应度。
5. 选择操作:根据适应度排序或轮盘赌等策略,选择优秀个体进行遗传操作。
6. 交叉操作:从选中的个体中进行交叉操作,生成新的个体。
可以使用单点交叉、多点交叉或均匀交叉等策略。
7. 变异操作:对生成的新个体进行变异操作,引入随机扰动,增加种群的多样性。
变异操作可以改变某个基因的值或重新随机生成某个基因。
8. 更新种群:将交叉和变异生成的个体合并到种群中。
9. 重复步骤4-8,直到满足终止条件(如达到最大迭代次数或种群适应度不再改变)。
10. 选择最优个体:从最终的种群中选择适应度最好的个体作为最优解,即SVM的最优参数。
通过以上步骤,遗传算法可以搜索参数空间,并找到最有解决方案。
通过尝试不同的参数组合,可以优化SVM模型的性能。
请注意,以上只是一般的遗传算法优化SVM参数的步骤,实际应用中可能会根据具体问题进行适当的调整。
在实际操作中,还可以通过引入其他优化技巧(如局部搜索)来进一步提高搜索效率。
遗传算法与蚁群算法简介

实数编码的GA通常采用算术交叉: 双个体算术交叉:x1、x2为父代个体,α ∈(0, 1)为随机数 x1' = αx1 + (1 - α)x2 x2' = αx2 + (1 - α)x1 多个体算术交叉: x1, …, x2为父代个体; αi ∈(0, 1)且∑αi = 1 x' = α1x1 + α2x2 + … + αnxn 组合优化中的置换编码GA通常采用 部分映射交叉(partially mapping crossover, PMX):随机选择两个交叉点,交换交叉点之间的片段;对于其他基因,若它不与换过来的片段冲突则保留,若冲突则通过部分映射来确定最后的基因 p1 = [2 6 4 | 7 3 5 8 | 9 1] p1' = [2 3 4 | 1 8 7 6 | 9 5] p2 = [4 5 2 | 1 8 7 6 | 9 3] p2' = [4 1 2 | 7 3 5 8 | 9 6]
北京交通大学计算机与信息技术学院
*
智能优化算法简介
*பைடு நூலகம்
20世纪80年代以来,一些优化算法得到发展 GA、EP、ACO、PSO、SA、TS、ANN及混合的优化策略等 基本思想:模拟或揭示某些自然现象或过程 为用传统的优化方法难以解决的NP-完全问题提供了有效的解决途径 由于算法构造的直观性与自然机理,因而通常被称作智能优化算法(intelligent optimization algorithms),或现代启发式算法(meta-heuristic algorithms) [智能优化算法及其应用,王凌,清华大学出版社,2001]
线性次序交叉(LOX)
单位置次序交叉(C1)
类似于OX。选择一个交叉位置,保留父代个体p1交叉位置前的基因,并在另一父代个体p2中删除p1中保留的基因,将剩余基因填入p1的交叉位置后来产生后代个体p1'。如父代个体同前,交叉位置为4,则后代个体为p1' =[2 6 4 7 | 5 1 8 9 3],p2' =[4 5 2 1 | 6 7 3 8 9]
Novel Genetic Algorithm Crossover Approaches for Time-Series Problems

Novel Genetic Algorithm Crossover Approaches forTime-Series ProblemsPaul M.Godley,Julie Cowie and David E.CairnsDepartment of Computing Science and MathematicsUniversity of StirlingScotlandpgo@August24,2007AbstractGenetic Algorithms(GAs)are a commonly used stochastic search heuristic which have been applied to a plethora of problem domains.GAs work on a population of chromosomes(an encoding of a solu-tion to the problem at hand)and breed solutions fromfit parents tohopefully producefitter children through a process of crossover andmutation.This work discusses two novel crossover approaches for GAswhen applied to the optimisation of time-series problems,with partic-ular application to bio-control schedules.1IntroductionIn optimization of intervention schedules for models of dynamic systems,Ge-netic Algorithms(GAs)commonly use Uniform Crossover(UC)as a method of achieving recombination[8].Recent work[4]has produced alternative crossover approaches which work on variable length chromosomes that have been shown to outperform UC when applied to dynamic problems,with spe-cific application to the area of bio-control scheduling.Although alternative variable length crossover approaches such as Messy GAs(mGA)exist[6], these have considerable complexity and a two-phase evolutionary approach [1].This work discusses a simplified approach,which is specifically designed for time-series problems.2Problem DomainThis work focuses on the optimisation of intervention schedules and has been tested initially in scheduling bio-control agents to combat sciaridflies. In mushroom farming,the presence of sciaridflies can drastically affect the quality of crop produced.Sciaridfly larvae feed on the mycelium in the casing layer of mushrooms which cause degradation of the crop.The nema-tode worm Steinernema feltiae has proven effective as a bio-control agent to combat this pest.A set of differential equations which represents the life-cycle of the sciaridflies and potential infection from nematode worms has been produced[3].These equations have been utilised as afitness function for testing the novel crossover approaches developed in this work,described in[4]and[5].3Crossover ApproachesThe novel crossover approaches detailed in[4]were designed to investi-gate if incorporating the number of interventions(application of bio-control agent)used by good solutions could be used to effectively drive the crossover process.These approaches,CalEB(Calculated Expanding Bin)and TInSSel (Targeted Intervention with Stochastic Selection)both provide mechanisms for crossover of variable andfixed length chromosomes,where each chro-mosome represents an intervention schedule.CalEB and TInSSel both use the number of interventions present in the parents to calculate the number required in the children,with CalEB utilising a“binning”approach to select the genetic material from the parents,whereas TInSSel contains an element of stochastic selection.4ExperimentsPrevious experiments reviewed CalEB,TInSSel and UC across varying ini-tial intervention samples[4],[5].These experiments were undertaken for initial population samples from min intervention to min intervention(i.e. 1to1,where each member of the initial population has1intervention)to min intervention to max intervention(i.e.1to50,where each member of the initial population has between1and50interventions).These differing variances in possible initial interventions enabled evaluation of how initial spread affects each of the crossover approaches infinding a solution.In addition it demonstrates how the initial variance in population affects theTable1:GA Run ParametersParameter Value Parameter Value Population size50Crossover probability1 Number of parents2Mutation probability0.05 Number of children2Days in nematode schedule50 Fitness Evaluations50-500Nematodes/intervention1000 robustness of each crossover approach.Current work reviews the quality of solutions produced when all experiments have min intervention to max intervention(1to50),which represents the decision maker being unsure of the sample population to use.The aim of this work is to evaluate the search ability of UC,CalEB and TInSSel across varying limits offitness functions evaluations to ascertain if there is any difference in search ability between these crossover types.The run parameters used for both these and previous experiments are shown in Table1.Each run was undertaken500 times and averaged for eachfitness function limit.Tournament selection was used to select parents for breeding as it has been shown to provide better or equivalent convergence and computational properties when compared to alternative approaches[2].The average scores for these experiments along with the associated95%confidence intervals are depicted in Figures1and2. Figure1shows that regardless of the number offitness functions available, UC solutions require more interventions than solutions returned by CalEB and TInSSel.Figure2shows a clear difference infitness score between TinS-Sel,CalEB and UC for most experiments,with the exception being those experiments where the number offitness functions are very large(as all ap-proaches have sufficient time tofind a solution).This experiment shows that both CalEB and TInSSel outperform UC in terms of intervention usage and quality of solution found over a varying number offitness function limits. This was also true when experiments were undertaken over varying initial population intervention numbers[4].5Future WorkIn order to better understand the dynamics of the novel approaches,appli-cation to varying problem domains is required.Future work will focus on deriving optimal treatment schedules for cancer chemotherapy[9],using the single drug model detailed in[7].Figure1:Intervention Utilisation for SolutionsFigure2:Fitness Scores for SolutionsReferences[1]D.Dasgupta and D.McGregor.Sga:A structured genetic algorithm,1992.[2]K.Deb and D.Kalyanmoy.Multi-Objective Optimization Using Evo-lutionary Algorithms.John Wiley&Sons,Inc.,New York,NY,USA, 2001.[3]A.Fenton,R.L.Gwynn,A.Gupta,R.Norman,J.P.Fairbairn,andP.J.Hudson.Optimal application strategies for entomopathogenic ne-matodes:integrating theoretical and empirical approaches.Journal of Applied Ecology,39(3):481–492,2002.[4]P.M.Godley,D.E.Cairns,and J.Cowie.Directed intervention crossoverapplied to bio-control scheduling.In IEEE CEC2007:Proceedings of the IEEE Congress On Evolutionary Computation,2007.[5]P.M.Godley,D.E.Cairns,and J.Cowie.Maximising the efficiency ofbio-control application utilising genetic algorithms.In EFITA/WCCA 2007:Proceedings of the6th Biennial Conference of European Federation of IT in Agriculture,Glasgow,Scotland,UK,2007.Glasgow Caledonian University.[6]D.Goldberg,K.Deb,and B.Korb.Messy genetic algorithms:motiva-tion,analysis,andfirst results.Clearinghouse for Genetic Algorithms, Dept.of Mechanical Engineering,University of Alabama,1989.[7]A.Petrovski.An Application of Genetic Algorithms to ChemotherapyTreatments.PhD thesis,1999.[8]A.Petrovski,A.Brownlee,and J.McCall.Statistical optimisation andtuning of ga factors.In Congress on Evolutionary Computation,pages 758–764,2005.[9]A.Petrovski,J.McCall,and E.Forrest.An application of genetic algo-rithms to optimisation of cancer chemotherapy.Int.J.of Mathematical Education in Science and Technology,29:377–388,1998.。
《上海理工大学本科毕业设计(论文)撰写规范及样本》
There should be one spaceline betweenABSTARCT textandKEYWORDS.It is appropriate to list3 to 5 keywords.
2.8
参考文献(三号华文中宋加粗,居中,段前4行,段后2行)。
参考文献序号用方括号括起。
参考文献序号和内容用五号宋体和Times New Roman。
2.9
致谢(三号华文中宋加粗,居中,段前4行,段后2行)。
致谢文本(小四号宋体和Times New Roman,首行缩进2字符,1.25倍行距)。
第
3.1
2.7
一级标题(三号华文中宋和Times New Roman加粗,居中,段前4行,段后2行)。
二级标题(四号宋体和Times New Roman加粗,左对齐顶格,段前1行,段后0.5行)。
三级标题(小四号宋体和Times New Roman加粗,左对齐顶格,段前0.5行,段后0行)。
正文文字(小四号宋体和Times New Roman,首行缩进2字符,1.25倍行距)。
中外文摘要均包括摘要正文和关键词。
1
论文摘要简要陈述本科毕业设计(论文)的内容,创新见解和主要论点。中文摘要在500字左右,外文摘要应与中文摘要的内容相符。
1
关键词是反映毕业设计(论文)主题内容的名词,是供检索使用的。关键词条应为通用词汇,不得自造关键分下方。
建议采用Microsoft Word 2010编排论文。
由于论文格式问题非常繁杂,无法将所有设置描述清楚,只能对一些主要的设置做出扼要的说明。一个快捷有效的方法就是把本规范的电子版作为模板。
Genetic_Algorithm
“遗传算法”专题一、遗传算法的主要特征:我们的目的是获得“最好解”,可以把这种任务看成是一个优化过程。
对于小空间,经典的穷举法就足够了;而对大空间,则需要使用特殊的人工智能技术。
遗传算法(Genetic Algorithm)是这些技术中的一种,它是一类模拟生物进化过程而产生的由选择算子、杂交算子和变异算子三个基本算子组成的全局寻优算法。
它从一个初始族出发,由选择算子选出性状好的父本,由杂交算子进行杂交运算,变异算子进行少许变异,在一定概率规则控制下随机搜索模型空间。
一代代进化,直到最终解族对应的误差泛函值达到设定的要求。
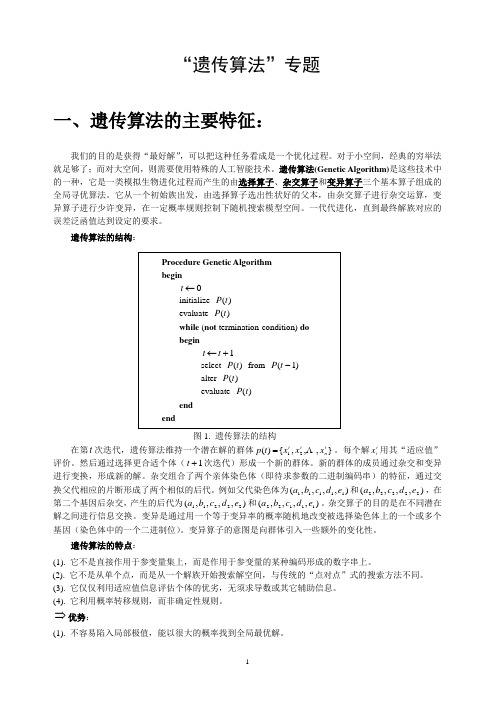
遗传算法的结构:图1. 遗传算法的结构在第t 次迭代,遗传算法维持一个潜在解的群体},,,{)(21tn t t x x x t p =。
每个解t i x 用其“适应值”评价。
然后通过选择更合适个体(1+t 次迭代)形成一个新的群体。
新的群体的成员通过杂交和变异进行变换,形成新的解。
杂交组合了两个亲体染色体(即待求参数的二进制编码串)的特征,通过交换父代相应的片断形成了两个相似的后代。
例如父代染色体为),,,,(11111e d c b a 和),,,,(22222e d c b a ,在第二个基因后杂交,产生的后代为),,,,(22211e d c b a 和),,,,(11122e d c b a 。
杂交算子的目的是在不同潜在解之间进行信息交换。
变异是通过用一个等于变异率的概率随机地改变被选择染色体上的一个或多个基因(染色体中的一个二进制位)。
变异算子的意图是向群体引入一些额外的变化性。
遗传算法的特点:(1). 它不是直接作用于参变量集上,而是作用于参变量的某种编码形成的数字串上。
(2). 它不是从单个点,而是从一个解族开始搜索解空间,与传统的“点对点”式的搜索方法不同。
(3). 它仅仅利用适应值信息评估个体的优劣,无须求导数或其它辅助信息。
(4). 它利用概率转移规则,而非确定性规则。
遗传算法

对于一个求函数最大值的优化问题(求函数最小值也类同),一般可以描述为下列数学规划模型:
遗传算法
式中x为决策变量,式2-1为目标函数式,式2-2、2-3为约束条件,U是基本空间,R是U的子集。满足约束条件的解X称为可行解,集合R表示所有满足约束条件的解所组成的集合,称为可行解集合。
2005年,江雷等针对并行遗传算法求解TSP问题,探讨了使用弹性策略来维持群体的多样性,使得算法跨过局部收敛的障碍,向全局最优解方向进化。
编辑本段一般算法
遗传算法是基于生物学的,理解或编程都不太难。下面是遗传算法的一般算法:
创建一个随机的初始状态
初始种群是从解中随机选择出来的,将这些解比喻为染色体或基因,该种群被称为第一代,这和符号人工智能系统的情况不一样,在那里问题的初始状态已经给定了。
(2)许多传统搜索算法都是单点搜索算法,容易陷入局部的最优解。遗传算法同时处理群体中的多个个体,即对搜索空间中的多个解进行评估,减少了陷入局部最优解的风险,同时算法本身易于实现并行化。
(3)遗传算法基本上不用搜索空间的知识或其它辅助信息,而仅用适应度函数值来评估个体,在此基础上进行遗传操作。适应度函数不仅不受连续可微的约束,而且其定义域可以任意设定。这一特点使得遗传算法的应用范围大大扩展。
Genetic Algorithms for multiple objective vehicle routing

a r X i v :0809.0416v 1 [c s .A I ] 2 S e p 2008Genetic Algorithms for multiple objective vehicle routingM.J.Geiger∗∗Production and Operations ManagementInstitute 510-Business AdministrationUniversity of HohenheimEmail:mail@martingeiger.deAbstract The talk describes a general approach of a genetic algorithm for multiple objective optimization problems.A particular dominance relation between the individuals of the population is used to define a fitness operator,enabling the genetic algorithm to adress even problems with efficient,but convex-dominated alternatives.The algorithm is implemented in a multilingual computer program,solving vehicle routing problems with time windows under multiple objectives.The graphical user interface of the program shows the progress of the genetic algorithm and the main parameters of the approach can be easily modified.In addition to that,the program provides powerful decision support to the decision maker.The software has proved it´s excellence at the finals of the European Academic Software Award EASA,held at the Keble college/University of Oxford/Great Britain.1The Genetic Algorithm for multiple objective optimization problems Based on a single objective genetic algorithm,different extensions for multiple objective optimization problems are proposed in literature [1,4,8,10]All of them tackle the multiple objective elements by modifying the evaluation and selection operator of the genetic pared to a single objective problem,more than one evaluation functions are considered and the fitness of the individuals cannot be directly calculated from the (one)objective value.Efficient but convex-dominated alternatives are difficult to obtain by integrating the consideredobjectives to a weighted sum (Figure 1).To overcome this problem,an approach of a selection-operator is presented,using only few information and providing a underlying self-adaption technique.In this approach,we use dominance-information of the individuals of the population by calculating for each individual i the number of alternatives ξi from which this individual is dominated.For a population consisting of n pop alternatives we get values of:0≤ξi ≤n pop −1(1)Individuals that are not being dominated by others should receive a higher fitness value than individuals that are being dominated,i.e.:if ξi <ξj →f (i )>f (j )∀i,j =1,...,n pop(2)if ξi =ξj →f (i )=f (j )∀i,j =1,...,n pop (3)ξmax ∗ξi(5) 2The implementation[7]The approach of the genetic algorithm is implemented in a computer program which solves vehicle routing problems with time windows under multiple objectives[6].The examined objectives are:•Minimizing the total distances traveled by the vehicles.•Minimizing the number of vehicles used.•Minimizing the time window violation.•Minimizing the number of violated time windows.The program illustrates the progress of the genetic algorithm and the parameters of the approach of the can simply be controlled by the graphical user interface(Figure2).In addition to the necessary calculations,the obtained alternatives of the vehicle routing problem can easily be compared,as shown in Figure3.For example the alternative with the shortest routes is compared to the alternative having the lowest time window violations.The windows show the routes,travelled by the vehicles from the depot to the customers.The time window violations are visualized with vertical bars at each customer.Red:The vehicle is too late,green:the truck arrives too early.For a more detailed comparison,inverse radar charts and3D-views are available,showing the trade-offbetween the objective values of the selected alternatives(Figure4).Porto,Portugal,July16-20,2001。
Immune genetic algorithm for weapon-target assignment problem

Chinese Academy of Sciences, Beijing 100080,China E-mail:gao_shang@
k =1
j =1
i=1
K
∑ s.t. nk = T
(2)
k =1
T
∑ xij = 1 , i = 1,2,",W
(3)
j =1
xij ∈ {0,1}, i = 1,2,",W , j = 1,2,",T (4)
where xij is a Boolean value indicating whether the
Abstract
An Immune Genetic Algorithm (IGA) is used to solve weapon-target assignment problem (WTA). The used immune system serves as a local search mechanism for genetic algorithm. Besides, in our implementation, a new crossover operator is proposed to preserve good information contained in the chromosome. A comparison of the proposed algorithm with several existing search approaches shows that the IGA outperforms its competitors on all tested WTA problems.
中英文双语外文文献翻译:一种基于...
中英⽂双语外⽂⽂献翻译:⼀种基于...此⽂档是毕业设计外⽂翻译成品(含英⽂原⽂+中⽂翻译),⽆需调整复杂的格式!下载之后直接可⽤,⽅便快捷!本⽂价格不贵,也就⼏⼗块钱!⼀辈⼦也就⼀次的事!英⽂3890单词,20217字符(字符就是印刷符),中⽂6398汉字。
A Novel Divide-and-Conquer Model for CPI Prediction UsingARIMA, Gray Model and BPNNAbstract:This paper proposes a novel divide-and-conquer model for CPI prediction with the existing compilation method of the Consumer Price Index (CPI) in China. Historical national CPI time series is preliminary divided into eight sub-indexes including food, articles for smoking and drinking, clothing, household facilities, articles and maintenance services, health care and personal articles, transportation and communication, recreation, education and culture articles and services, and residence. Three models including back propagation neural network (BPNN) model, grey forecasting model (GM (1, 1)) and autoregressive integrated moving average (ARIMA) model are established to predict each sub-index, respectively. Then the best predicting result among the three models’for each sub-index is identified. To further improve the performance, special modification in predicting method is done to sub-CPIs whose forecasting results are not satisfying enough. After improvement and error adjustment, we get the advanced predicting results of the sub-CPIs. Eventually, the best predicting results of each sub-index are integrated to form the forecasting results of the national CPI. Empirical analysis demonstrates that the accuracy and stability of the introduced method in this paper is better than many commonly adopted forecasting methods, which indicates the proposed method is an effective and alternative one for national CPI prediction in China.1.IntroductionThe Consumer Price Index (CPI) is a widely used measurement of cost of living. It not only affects the government monetary, fiscal, consumption, prices, wages, social security, but also closely relates to the residents’daily life. As an indicator of inflation in China economy, the change of CPI undergoes intense scrutiny. For instance, The People's Bank of China raised the deposit reserve ratio in January, 2008 before the CPI of 2007 was announced, for it is estimated that the CPI in 2008 will increase significantly if no action is taken. Therefore, precisely forecasting the change of CPI is significant to many aspects of economics, some examples include fiscal policy, financial markets and productivity. Also, building a stable and accurate model to forecast the CPI will have great significance for the public, policymakers and research scholars.Previous studies have already proposed many methods and models to predict economic time series or indexes such as CPI. Some previous studies make use of factors that influence the value of the index and forecast it by investigating the relationship between the data of those factors and the index. These forecasts are realized by models such as Vector autoregressive (VAR)model1 and genetic algorithms-support vector machine (GA-SVM) 2.However, these factor-based methods, although effective to some extent, simply rely on the correlation between the value of the index and limited number of exogenous variables (factors) and basically ignore the inherent rules of the variation of the time series. As a time series itself contains significant amount of information3, often more than a limited number of factors can do, time series-based models are often more effective in the field of prediction than factor-based models.Various time series models have been proposed to find the inherent rules of the variation in the series. Many researchers have applied different time series models to forecasting the CPI and other time series data. For example, the ARIMA model once served as a practical method in predicting the CPI4. It was also applied to predict submicron particle concentrations frommeteorological factors at a busy roadside in Hangzhou, China5. What’s more, the ARIMA model was adopted to analyse the trend of pre-monsoon rainfall data forwestern India6. Besides the ARIMA model, other models such as the neural network, gray model are also widely used in the field of prediction. Hwang used the neural-network to forecast time series corresponding to ARMA (p, q) structures and found that the BPNNs generally perform well and consistently when a particular noise level is considered during the network training7. Aiken also used a neural network to predict the level of CPI and reached a high degree of accuracy8. Apart from the neural network models, a seasonal discrete grey forecasting model for fashion retailing was proposed and was found practical for fashion retail sales forecasting with short historical data and better than other state-of-art forecastingtechniques9. Similarly, a discrete Grey Correlation Model was also used in CPI prediction10. Also, Ma et al. used gray model optimized by particle swarm optimization algorithm to forecast iron ore import and consumption of China11. Furthermore, to deal with the nonlinear condition, a modified Radial Basis Function (RBF) was proposed by researchers.In this paper, we propose a new method called “divide-and-conquer model”for the prediction of the CPI.We divide the total CPI into eight categories according to the CPI construction and then forecast the eight sub- CPIs using the GM (1, 1) model, the ARIMA model and the BPNN. To further improve the performance, we again make prediction of the sub-CPIs whoseforecasting results are not satisfying enough by adopting new forecasting methods. After improvement and error adjustment, we get the advanced predicting results of the sub-CPIs. Finally we get the total CPI prediction by integrating the best forecasting results of each sub-CPI.The rest of this paper is organized as follows. In section 2, we give a brief introduction of the three models mentioned above. And then the proposed model will be demonstrated in the section 3. In section 4 we provide the forecasting results of our model and in section 5 we make special improvement by adjusting the forecasting methods of sub-CPIs whose predicting results are not satisfying enough. And in section 6 we give elaborate discussion and evaluation of the proposed model. Finally, the conclusion is summarized in section 7.2.Introduction to GM(1,1), ARIMA & BPNNIntroduction to GM(1,1)The grey system theory is first presented by Deng in 1980s. In the grey forecasting model, the time series can be predicted accurately even with a small sample by directly estimating the interrelation of data. The GM(1,1) model is one type of the grey forecasting which is widely adopted. It is a differential equation model of which the order is 1 and the number of variable is 1, too. The differential equation is:Introduction to ARIMAAutoregressive Integrated Moving Average (ARIMA) model was first put forward by Box and Jenkins in 1970. The model has been very successful by taking full advantage of time series data in the past and present. ARIMA model is usually described as ARIMA (p, d, q), p refers to the order of the autoregressive variable, while d and q refer to integrated, and moving average parts of the model respectively. When one of the three parameters is zero, the model is changed to model “AR”, “MR”or “ARMR”. When none of the three parameters is zero, the model is given by:where L is the lag number,?t is the error term.Introduction to BPNNArtificial Neural Network (ANN) is a mathematical and computational model which imitates the operation of neural networks of human brain. ANN consists of several layers of neurons. Neurons of contiguous layers are connected with each other. The values of connections between neurons are called “weight”. Back Propagation Neural Network (BPNN) is one of the most widely employed neural network among various types of ANN. BPNN was put forward by Rumelhart and McClelland in 1985. It is a common supervised learning network well suited for prediction. BPNN consists of three parts including one input layer, several hidden layers and one output layer, as is demonstrated in Fig 1. The learning process of BPNN is modifying the weights of connections between neurons based on the deviation between the actual output and the target output until the overall error is in the acceptable range.Fig. 1. Back-propagation Neural Network3.The Proposed MethodThe framework of the dividing-integration modelThe process of forecasting national CPI using the dividing-integration model is demonstrated in Fig 2.Fig. 2.The framework of the dividing-integration modelAs can be seen from Fig. 2, the process of the proposed method can be divided into the following steps: Step1: Data collection. The monthly CPI data including total CPI and eight sub-CPIs are collected from the official website of China’s State Statistics Bureau (/doc/d62de4b46d175f0e7cd184254b35eefdc9d31514.html /).Step2: Dividing the total CPI into eight sub-CPIs. In this step, the respective weight coefficient of eight sub- CPIs in forming the total CPI is decided by consulting authoritative source .(/doc/d62de4b46d175f0e7cd184254b35eefdc9d31514.html /). The eight sub-CPIs are as follows: 1. Food CPI; 2. Articles for Smoking and Drinking CPI; 3. Clothing CPI; 4. Household Facilities, Articles and Maintenance Services CPI; 5. Health Care and Personal Articles CPI; 6. Transportation and Communication CPI;7. Recreation, Education and Culture Articles and Services CPI; 8. Residence CPI. The weight coefficient of each sub-CPI is shown in Table 8.Table 1. 8 sub-CPIs weight coefficient in the total indexNote: The index number stands for the corresponding type of sub-CPI mentioned before. Other indexes appearing in this paper in such form have the same meaning as this one.So the decomposition formula is presented as follows:where TI is the total index; Ii (i 1,2, ,8) are eight sub-CPIs. To verify the formula, we substitute historical numeric CPI and sub-CPI values obtained in Step1 into the formula and find the formula is accurate.Step3: The construction of the GM (1, 1) model, the ARIMA (p, d, q) model and the BPNN model. The three models are established to predict the eight sub-CPIs respectively.Step4: Forecasting the eight sub-CPIs using the three models mentioned in Step3 and choosing the best forecasting result for each sub-CPI based on the errors of the data obtained from the three models.Step5: Making special improvement by adjusting the forecasting methods of sub-CPIs whose predicting results are not satisfying enough and get advanced predicting results of total CPI. Step6: Integrating the best forecasting results of 8 sub-CPIs to form the prediction of total CPI with the decomposition formula in Step2.In this way, the whole process of the prediction by the dividing-integration model is accomplished.3.2. The construction of the GM(1,1) modelThe process of GM (1, 1) model is represented in the following steps:Step1: The original sequence:Step2: Estimate the parameters a and u using the ordinary least square (OLS). Step3: Solve equation as follows.Step4: Test the model using the variance ratio and small error possibility.The construction of the ARIMA modelFirstly, ADF unit root test is used to test the stationarity of the time series. If the initial time series is not stationary, a differencing transformation of the data is necessary to make it stationary. Then the values of p and q are determined by observing the autocorrelation graph, partial correlation graph and the R-squared value.After the model is built, additional judge should be done to guarantee that the residual error is white noise through hypothesis testing. Finally the model is used to forecast the future trend ofthe variable.The construction of the BPNN modelThe first thing is to decide the basic structure of BP neural network. After experiments, we consider 3 input nodes and 1 output nodes to be the best for the BPNN model. This means we use the CPI data of time , ,toforecast the CPI of time .The hidden layer level and the number of hidden neurons should also be defined. Since the single-hidden- layer BPNN are very good at non-liner mapping, the model is adopted in this paper. Based on the Kolmogorov theorem and testing results, we define 5 to be the best number of hidden neurons. Thus the 3-5-1 BPNN structure is determined.As for transferring function and training algorithm, we select ‘tansig’as the transferring function for middle layer, ‘logsig’for input layer and ‘traingd’as training algorithm. The selection is based on the actual performance of these functions, as there are no existing standards to decide which ones are definitely better than others.Eventually, we decide the training times to be 35000 and the goal or the acceptable error to be 0.01.4.Empirical AnalysisCPI data from Jan. 2012 to Mar. 2013 are used to build the three models and the data from Apr. 2013 to Sept. 2013 are used to test the accuracy and stability of these models. What’s more, the MAPE is adopted to evaluate the performance of models. The MAPE is calculated by the equation:Data sourceAn appropriate empirical analysis based on the above discussion can be performed using suitably disaggregated data. We collect the monthly data of sub-CPIs from the website of National Bureau of Statistics of China(/doc/d62de4b46d175f0e7cd184254b35eefdc9d31514.html /).Particularly, sub-CPI data from Jan. 2012 to Mar. 2013 are used to build the three models and the data from Apr. 2013 to Sept. 2013 are used to test the accuracy and stability of these models.Experimental resultsWe use MATLAB to build the GM (1,1) model and the BPNN model, and Eviews 6.0 to build the ARIMA model. The relative predicting errors of sub-CPIs are shown in Table 2.Table 2.Error of Sub-CPIs of the 3 ModelsFrom the table above, we find that the performance of different models varies a lot, because the characteristic of the sub-CPIs are different. Some sub-CPIs like the Food CPI changes drastically with time while some do not have much fluctuation, like the Clothing CPI. We use different models to predict the sub- CPIs and combine them by equation 7.Where Y refers to the predicted rate of the total CPI, is the weight of the sub-CPI which has already been shown in Table1and is the predicted value of the sub-CPI which has the minimum error among the three models mentioned above. The model chosen will be demonstrated in Table 3:Table 3.The model used to forecastAfter calculating, the error of the total CPI forecasting by the dividing-integration model is 0.0034.5.Model Improvement & Error AdjustmentAs we can see from Table 3, the prediction errors of sub-CPIs are mostly below 0.004 except for two sub- CPIs: Food CPI whose error reaches 0.0059 and Transportation & Communication CPI 0.0047.In order to further improve our forecasting results, we modify the prediction errors of the two aforementioned sub-CPIs by adopting other forecasting methods or models to predict them. The specific methods are as follows.Error adjustment of food CPIIn previous prediction, we predict the Food CPI using the BPNN model directly. However, the BPNN model is not sensitive enough to investigate the variation in the values of the data. For instance, although the Food CPI varies a lot from month to month, the forecasting values of it are nearly all around 103.5, which fails to make meaningful prediction.We ascribe this problem to the feature of the training data. As we can see from the original sub-CPI data on the website of National Bureau of Statistics of China, nearly all values of sub-CPIs are around 100. As for Food CPI, although it does have more absolute variations than others, its changes are still very small relative to the large magnitude of the data (100). Thus it will be more difficult for the BPNN model to detect the rules of variations in training data and the forecastingresults are marred.Therefore, we use the first-order difference series of Food CPI instead of the original series to magnify the relative variation of the series forecasted by the BPNN. The training data and testing data are the same as that in previous prediction. The parameters and functions of BPNN are automatically decided by the software, SPSS.We make 100 tests and find the average forecasting error of Food CPI by this method is 0.0028. The part of the forecasting errors in our tests is shown as follows in Table 4:Table 4.The forecasting errors in BPNN testError adjustment of transportation &communication CPIWe use the Moving Average (MA) model to make new prediction of the Transportation and Communication CPI because the curve of the series is quite smooth with only a few fluctuations. We have the following equation(s):where X1, X2…Xn is the time series of the Transportation and Communication CPI, is the value of moving average at time t, is a free parameter which should be decided through experiment.To get the optimal model, we range the value of from 0 to 1. Finally we find that when the value of a is 0.95, the forecasting error is the smallest, which is 0.0039.The predicting outcomes are shown as follows in Table5:Table 5.The Predicting Outcomes of MA modelAdvanced results after adjustment to the modelsAfter making some adjustment to our previous model, we obtain the advanced results as follows in Table 6: Table 6.The model used to forecast and the Relative ErrorAfter calculating, the error of the total CPI forecasting by the dividing-integration model is 0.2359.6.Further DiscussionTo validate the dividing-integration model proposed in this paper, we compare the results of our model with the forecasting results of models that do not adopt the dividing-integration method. For instance, we use the ARIMA model, the GM (1, 1) model, the SARIMA model, the BRF neural network (BRFNN) model, the Verhulst model and the Vector Autoregression (VAR) model respectively to forecast the total CPI directly without the process of decomposition and integration. The forecasting results are shown as follows in Table7.From Table 7, we come to the conclusion that the introduction of dividing-integration method enhances the accuracy of prediction to a great extent. The results of model comparison indicate that the proposed method is not only novel but also valid and effective.The strengths of the proposed forecasting model are obvious. Every sub-CPI time series have different fluctuation characteristics. Some are relatively volatile and have sharp fluctuations such as the Food CPI while others are relatively gentle and quiet such as the Clothing CPI. As a result, by dividing the total CPI into several sub-CPIs, we are able to make use of the characteristics of each sub-CPI series and choose the best forecasting model among several models for every sub-CPI’s prediction. Moreover, the overall prediction error is provided in the following formula:where TE refers to the overall prediction error of the total CPI, is the weight of the sub-CPI shown in table 1 and is the forecasting error of corresponding sub-CPI.In conclusion, the dividing-integration model aims at minimizing the overall prediction errors by minimizing the forecasting errors of sub-CPIs.7.Conclusions and future workThis paper creatively transforms the forecasting of national CPI into the forecasting of 8 sub-CPIs. In the prediction of 8 sub-CPIs, we adopt three widely used models: the GM (1, 1) model, the ARIMA model and the BPNN model. Thus we can obtain the best forecasting results for each sub-CPI. Furthermore, we make special improvement by adjusting the forecasting methods of sub-CPIs whose predicting results are not satisfying enough and get the advanced predicting results of them. Finally, the advanced predicting results of the 8 sub- CPIs are integrated to formthe forecasting results of the total CPI.Furthermore, the proposed method also has several weaknesses and needs improving. Firstly, The proposed model only uses the information of the CPI time series itself. If the model can make use of other information such as the information provided by factors which make great impact on the fluctuation of sub-CPIs, we have every reason to believe that the accuracy and stability of the model can be enhanced. For instance, the price of pork is a major factor in shaping the Food CPI. If this factor is taken into consideration in the prediction of Food CPI, the forecasting results will probably be improved to a great extent. Second, since these models forecast the future by looking at the past, they are not able to sense the sudden or recent change of the environment. So if the model can take web news or quick public reactions with account, it will react much faster to sudden incidence and affairs. Finally, the performance of sub-CPIs prediction can be higher. In this paper we use GM (1, 1), ARIMA and BPNN to forecast sub-CPIs. Some new method for prediction can be used. For instance, besides BPNN, there are other neural networks like genetic algorithm neural network (GANN) and wavelet neural network (WNN), which might have better performance in prediction of sub-CPIs. Other methods such as the VAR model and the SARIMA model should also be taken into consideration so as to enhance the accuracy of prediction.References1.Wang W, Wang T, and Shi Y. Factor analysis on consumer price index rising in China from 2005 to 2008. Management and service science 2009; p. 1-4.2.Qin F, Ma T, and Wang J. The CPI forecast based on GA-SVM. Information networking and automation 2010; p. 142-147.3.George EPB, Gwilym MJ, and Gregory CR. Time series analysis: forecasting and control. 4th ed. Canada: Wiley; 20084.Weng D. The consumer price index forecast based on ARIMA model. WASE International conferenceon information engineering 2010;p. 307-310.5.Jian L, Zhao Y, Zhu YP, Zhang MB, Bertolatti D. An application of ARIMA model to predict submicron particle concentrations from meteorological factors at a busy roadside in Hangzhou, China. Science of total enviroment2012;426:336-345.6.Priya N, Ashoke B, Sumana S, Kamna S. Trend analysis and ARIMA modelling of pre-monsoon rainfall data forwestern India. Comptesrendus geoscience 2013;345:22-27.7.Hwang HB. Insights into neural-network forecasting of time seriescorresponding to ARMA(p; q) structures. Omega2001;29:273-289./doc/d62de4b46d175f0e7cd184254b35eefdc9d31514.html am A. Using a neural network to forecast inflation. Industrial management & data systems 1999;7:296-301.9.Min X, Wong WK. A seasonal discrete grey forecasting model for fashion retailing. Knowledge based systems 2014;57:119-126.11. Weimin M, Xiaoxi Z, Miaomiao W. Forecasting iron ore import and consumption of China using grey model optimized by particleswarm optimization algorithm. Resources policy 2013;38:613-620.12. Zhen D, and Feng S. A novel DGM (1, 1) model for consumer price index forecasting. Greysystems and intelligent services (GSIS)2009; p. 303-307.13. Yu W, and Xu D. Prediction and analysis of Chinese CPI based on RBF neural network. Information technology and applications2009;3:530-533.14. Zhang GP. Time series forecasting using a hybrid ARIMA and neural network model. Neurocomputing 2003;50:159-175.15. Pai PF, Lin CS. A hybrid ARIMA and support vector machines model in stock price forecasting. Omega 2005;33(6):497-505.16. Tseng FM, Yu HC, Tzeng GH. Combining neural network model with seasonal time series ARIMA model. Technological forecastingand social change 2002;69(1):71-87.17.Cho MY, Hwang JC, Chen CS. Customer short term load forecasting by using ARIMA transfer function model. Energy management and power delivery, proceedings of EMPD'95. 1995 international conference on IEEE, 1995;1:317-322.译⽂:⼀种基于ARIMA、灰⾊模型和BPNN对CPI(消费物价指数)进⾏预测的新型分治模型摘要:在本⽂中,利⽤我国现有的消费者价格指数(CPI)的计算⽅法,提出了⼀种新的CPI预测分治模型。
一种基于多传感器的无人机避障算法

《工业控制计算机》2021年第34卷第5期89一种基于多传感器的无人机避障算法A Multi-sensor-based UAV Obstacle Avo i dance Algor i t hm赵志章贺勇刘甜(长沙理工大学电气与信息工程学院,湖南长沙410000)摘要:针对无人机避障问题,提出一种基于多传感器的四旋翼无人机避障方法。
外部传感器主要包括了GPS模块、激光雷达与单目摄像头。
对二维VFH(Vector Fi ald H i stogram)方法进行了改进,通过计算了无人机自身体积,直接将障碍物直方图二值化,加入获得的障碍物高度信息,提出了一种移动成本代价函数,使无人机进行最优的条件下垂直和水平各转向角的选择。
仿真实验结果表明,该方法能够实现无人机在未知环境中从起点到目标点的避障。
关键词:无人机;多传感器;VFH;代价函数Abstract:A mult i-sensor four-rotor UAV 2.5-d i m ans ional obstacle avo idanca methods proposed for UAV obstacle avo i d ance.External sensors ma i n ly include GPS modules,l i d ar and monocular cameras.By calculat i n g the volume of UAV itself,b i n ar i z i n g the obstacle h i s togram d i r ectly and add i n g the obta i n ed obstacle he i g htnformat i o n,a mov i n g cost cost funct ionsproposed in th i s paper.The UAV can select the vert i c al and hor i z ontal steer i n g angles under the opt i m al cond i t i o ns.The s i m ulat i o n results show that th i s method can avo i d obstacles from start ing po i n t to target po i n t in unknown env i r onment.Keywords:UAV,mult i-sensor,VFH,cost funct i o n近年来,多旋翼无人机作为具有垂直起降能力和较高机动性的空中移动机器人,被广泛应用于测绘、巡线[1]、植保0、物流运输回等多种场景。
Genetic Algorithms for Machine Learning

Abstraቤተ መጻሕፍቲ ባይዱt
One approach to the design of learning systems is to extract heuristics from existing adaptive systems. Genetic algorithms are heuristic learning models based on principles drawn from natural evolution and selective breeding. Some features that distinguish genetic algorithms from other search methods are: learning systems that use genetic algorithms to learn strategies for sequential decision problems [5]. In our Samuel system [7], the \chromosome" of the genetic algorithm represents a set of condition-action rules for controlling an autonomous vehicle or a robot. The tness of a rule set is measured by evaluating the performance of the resulting control strategy on a simulator. This system has successfully learned highly e ective strategies for several tasks, including evading a predator, tracking a prey, seeking a goal while avoiding obstacles, and defending a goal from threatening agents. As these examples show, we have a high level of interest in learning in multi-agent environments in which the behaviors of the external agents are not easily characterized by the learner. We have found that genetic algorithms provide an ecient way to learn strategies that take advantage of subtle regularities in the behavior of opposing agents. We are now beginning to investigate the more general case in which the behavior of the external agents changes over time. In particular, we are interested in learning competitive strategies against an opponent that is itself a learning agent. This is, of course, the usual situation in natural environments in which multiple species compete for survival. Our initial studies lead us to expect that genetic learning systems can successfully adapt to changing environmental conditions. While the range of applications of genetic algorithms continues to grow more rapidly each year, the study of the theoretical foundations is still in an early stage. Holland's early work [9] showed that a simple form of genetic algorithm implicitly estimates the utility of a vast number of distinct subspaces, and allocates future trials accordingly. Speci cally, let H be a hyperplane in the representation space. For example, if the structures are represented by six binary features, then the hyperplane denoted by H =0#1### consists of all structures in which the rst feature is absent and the third feature is present. Holland showed that the expected number of samples (o spring) allocated to a hyperplane H at time t + 1 is given by: ( + 1) M (H; t) 3
MIMO参考文献综述

MIMO参考文献分类综述1.Jian Li and Petre Stoica,MIMO Radar with Colocated Antennas. IEEE SIGNAL PROCESSING MAGAZINE, 106-114 SEPTEMBER 20072.Alexander M. Haimovich, Rick S. Blum, and Leonard J. Cimini, Jr, MIMO Radar with Widely Separated Antennas. IEEE SIGNAL PROCESSING MAGAZINE, 116-129 JANUA RY 20083. B J Donnet, I D Longstaff, MIMO Radar, Techniques and Opportunities, Proceedings of the 3rd EuropeanRadar Conference, 112-115, September 2006, Manchester UK对抗目标闪烁及目标检测1.Eran Fishler, Alexander Haimovich , Rick S. Blum,edt.Spatial Diversity in Radars-Models and DetectionPerformance. IEEE Trans, SP, VOL. 54, NO. 3, MARCH 20062.Antonio Demaio, Marco Lops, Design Principles of MIMO Radar Detectors, IEEE Trans, AEROSPACEAND ELECTRONIC SYSTEMS VOL. 43, NO. 3, 886-898,JULY 20073.Nikolaus H. Lehmann, Eran Fishler, Alexander M. Haimovich,edt., Evaluation of Transmit Diversity inMIMO-Radar Direction Finding. IEEE Trans, SP, VOL. 55, NO. 5, 2215-2225, MAY 20074.Eran Fishler, Alex Haimovich, Rick Blum,edt.Performance of MIMO Radar Systems: Advantagesof Angular Diversity, 305-309, 2004MIMO阵列中的自适应方法1.Chun-Yang Chen and P. P. Vaidyanathan. A Subspace Method for MIMO Radar Space-Time AdaptiveProcessing. ICASSP 2007Ⅱ 925-9282.P.F. Sammartino , C.J. Baker, H.D. Griffiths. Adaptive MIMO radar system in clutter. 20063.Zengjiankui,Hezishu,Liubo. Adaptive Space-time-waveform Processing for MIMO Radar 20074.Luzhou Xu, Jian Li, Petre Stoica, Adaptive Techniques for MIMO Radar 20065.Vito F. Mecca, Dinesh Ramakrishnan, Jeffrey L. Krolik, MIMO Radar Space-Time Adaptive Processing forMultipath Clutter Mitigation, 249-253, 2006发射波形设计1.Ian J. Craddock, G.S. Hilton and P. Urwin-Wright, An Investigation of Pattern Correlation and MutualCoupling in MIMO Arrays 2004 ,1247-12502.Geoffrey San Antonio and Daniel R. Fuhrmann, Beampattern synthesis for wideband MIMO radar systems.2005, 105-1083.Hammad A. Khan, David J. Edwards, Doppler Problems in Orthogonal MIMO Radars, 244-247, 20064.Tuomas Aittom¨aki, Visa Koivunen, Low-Complexity Method for Transmit Beamforming in MIMO Radars,II 305-308 IEEE ICASSP 20075.Yang Yang,Rick S. Blum,Minimax Robust MIMO Radar Waveform Design, IEEE JOURNAL OFSELECTED TOPICS IN SIGNAL PROCESSING, VOL. 1, NO. 1,147-155, JUNE 20076.Douglas A Gray, Rowan Fry,MIMO Noise Radar – Element and Beam Space Comparisons, Conf.Waveform Diversity & Design, , 344-347,20077.Geoffrey San Antonio, Daniel R. Fuhrmann, Frank C. Robey,MIMO Radar Ambiguity Function s, IEEEJOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 1, NO. 1, 167-177 JUNE 2007 8.Yang Yang,Rick S. Blum, MIMO Radar Waveform Design Based on Mutual Information and MinimumMean-Square Error Estimation, IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONICSYSTEMS VOL. 43, NO. 1,330-343 JANUARY 20079.Petre Stoica,Jian Li, Yao Xie, On Probing Signal Design For MIMO Radar, IEEE TRANSACTIONS ONSIGNAL PROCESSING, VOL. 55, NO. 8,4151-4161, AUGUST 200710.Bo Liu, Zishu He, Qian He, Optimization of Orthogonal Discrete Frequency-Coding Waveform Based onModified Genetic Algorithm for MIMO Radar,11.Gordon J. Frazer, Ben A. Johnson, Yuri I. Abramovich, Orthogonal Waveform Support in MIMO HF OTHRadars,Conf, IEEE Waveform Diversity & Design, 423-427 2007ngford B White and Pinaki S Ray, Signal Design for MIMO Diversity Systems, 973-977,200413.Bekkerman and J. Tabrikian, Spatially coded signal model for active arrays, ICASSP 2004 209-21214.Daniel R. Fuhrmann ,Geoffrey San Antonio, Transmit Beamforming for MIMO Radar SystemsUsing Partial Signal Correlation, 295-299,200415. K,W,Forsythe, D.W.Bliss,Waveform correlation and optimization issues for MIMO radar, 1306-1310,200516. BENJAMIN FRIEDLANDER, Waveform Design for MIMO Radars, 2005 IEEE CORRESPONDENCE17. Luzhou Xu1, Jian Li1, Petre Stoica2,Waveform Optimization for MIMO Radar A Cramer-Rao Bound BasedStudy, II 917-920, IEEE ICASSP 2007目标检测及参数估计1.Joseph Tabrikian, Barankin Bounds for Target Localization by MIMO Radars. 278-281,20062.Abbas Sheikhi Ali Zamani, Coherent Detection for MIMO Radars, 302-307, 20073.Nikolaus H. Lehmann, Alexander M. Haimovich,edt, High Resolution Capabilities of MIMO Radar 20064.Xi-Zeng Dai, Jia Xu ,Ying-Ning Peng, High Resolution Frequency MIMO Radar, 693-698, 20075.Luzhou Xu and Jian Li,Iterative Generalized-Likelihood Ratio Test for MIMO Radar,IEEE Trans, SP,VOL. 55, NO. 6, 2375-2385 JUNE 20076.Jian Li, Petre Stoica, Luzhou Xu, edt,On Parameter Identifiability of MIMO Radar, IEEE SIGNALPROCESSING LETTERS 1-4 20077.Chaoran Du, John S. Thompson, and Yvan Petillot, Predicted Detection Performance of MIMO Radar, IEEESIGNAL PROCESSING LETTERS, VOL. 15,83-86, 20088.Eran Fishler, Alexander Haimovich, Rick S. Blum, edt, Spatial Diversity in Radars—Models andDetection Performance, IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3,823-838,MARCH 20069.Ilya Bekkerman and Joseph Tabrikian, Target Detection and Localization Using MIMO Radars and Sonars,IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 10,3873-3883, OCTOBER 2006其它论题1.K. W. Forsythe, D. W. Bliss, G. S. Fawcett, Multiple-Input Multiple-Output (MIMO) Radar: PerformanceIssues, 310-315,2004。
sga-pde 遗传算法 偏微分方程

sga-pde 遗传算法偏微分方程
SGA-PDE (Steady-State Genetic Algorithm for Partial Differential Equations) 是一种应用于求解偏微分方程的遗传算法。
偏微分方程是描述自然界中许多现象的数学方程,如流体力学、热传导等。
SGA-PDE 的基本思想是将偏微分方程的求解问题转化为一个优化问题。
遗传算法则是一种模拟自然界进化过程的优化算法,通过模拟“选择、交叉、变异”等基因操作,逐步优化求解问题的解。
在 SGA-PDE 中,偏微分方程的解被编码成一个个体的基因序列。
每个个体通过解码得到对应的数值解,然后通过计算适应度函数来评估个体的适应度,即求解方程的误差。
适应度函数可以根据具体问题进行定义,常见的包括残差平方和、误差范数等。
SGA-PDE 的优化过程包括选择、交叉和变异。
选择操作根据个体的适应度选择出一部分优秀的个体作为父代,交叉操作通过交换基因序列的片段来产生新的个体,变异操作则在个体的基因序列中引入随机扰动。
通过多代的迭代,SGA-PDE 可以逐步找到适应度最高的个体,即偏微分方程的近似解。
SGA-PDE 的优点是可以求解各种类型的偏微分方程,并且不受问题维度的限制。
它在求解复杂的偏微分方程问题时具有一定的优势,但也存在着计算复杂度高、收敛性不稳定等问题。
因此,在应用
SGA-PDE 求解偏微分方程问题时,需要根据具体问题的特点进行参数选择和算法改进,以提高求解效率和精度。
一种嵌入思维进化的新的进化算法

一种嵌入思维进化的新的进化算法杜金玲;刘大莲;李奇会【摘要】对于运筹学问题学中的函数优化问题,本文提出一种嵌入思维进化的新的进化算法,将思维进化计算(Mind Evolutionary Computation,MEC)的“趋同”和“异化”操作加入到进化算法中,充分利用其特有记忆机制、定向机制和探测与开采功能之间的协调机制的好性能,并加入K-meams聚类算法,保证群体多样性.最后,数值模拟验证了新算法的有效性.%A new evolutionary algorithm for global optimization embe dded in the mind evolutionary computation for optimal problem in operational reserch is offered in this paper. Operations of similartaxis and dissimilation of mind evolutionary computation join in with the EC to make the best of the good quality of the evolutionary directionality mechanism, memory mechanism and harmony mechanism between exploitation and exploration. Also, K-meams clustering algorithm is used to ensure the diversity of the population. At last, the numerical results also show that the new approach is efficient.【期刊名称】《运筹与管理》【年(卷),期】2012(021)003【总页数】4页(P95-98)【关键词】运筹学;进化计算;思维进化计算;趋同;异化;聚类【作者】杜金玲;刘大莲;李奇会【作者单位】山东建筑大学管理学院,山东济南250101;北京联合大学基础教学部,北京100101;山东建筑大学管理学院,山东济南250101【正文语种】中文【中图分类】TP301.6遗传算法(Genetic Algorithms,GA)是1968年美国密歇根大学的J.Holland教授和他的学生们提出的,并逐渐为人们所接受[1,2]。
kofnGA包用户指南说明书
Package‘kofnGA’October13,2022Title A Genetic Algorithm for Fixed-Size Subset SelectionVersion1.3Description Provides a function that uses a genetic algorithm to search for a subset of size k from the integers1:n,such that a user-supplied objective functionis minimized at that subset.The selection step is done by tournament selectionbased on ranks,and elitism may be used to retain a portion of the best solutionsfrom one generation to the next.Population objective function values mayoptionally be evaluated in parallel.License GPL-2Encoding UTF-8LazyData trueRoxygenNote6.1.0Imports bigmemoryNeedsCompilation noAuthor Mark A.Wolters[aut,cre]Maintainer Mark A.Wolters<*****************>Repository CRANDate/Publication2018-11-0206:10:03UTCR topics documented:kofnGA-package (2)kofnGA (2)plot.GAsearch (6)print.GAsearch (6)print.summary.GAsearch (7)summary.GAsearch (7)Index81kofnGA-package kofnGA:A genetic algorithm for selection offixed-size subsets.DescriptionA genetic algorithm(GA)to do subset selection:search for a subset of afixed size,k,from theintegers1:n,such that user-supplied function is minimized at that subset.DetailsThis package provides the function kofnGA,which implements a GA to perform subset selection;that is,choosing the best k elements from among n possibilities.We label the set of possibilities from which we are choosing by the integers1:n,and a solution is represented by an index vector,i.e.,a vector of integers in the range[1,n](with no duplicates)indicating which members of the setto choose.The objective function(defining which solution is“best”)is arbitrary and user-supplied;the only restriction on this function is that itsfirst argument must be an index vector encoding the solution.The search results output by kofnGA are a list object assigned to the S3class GAsearch.The package includes summary,print,and plot methods for this class to make it easier to inspect the results. kofnGA Search for the best subset of size k from n choices.DescriptionkofnGA implements a genetic algorithm for subset selection.The function searches for a subset of afixed size,k,from the integers1:n,such that user-supplied function OF is minimized at that subset.The selection step is done by tournament selection based on ranks,and elitism may be used to retain the best solutions from one generation to the next.Population objective function values can be evaluated in parallel.UsagekofnGA(n,k,OF,popsize=200,keepbest=floor(popsize/10),ngen=500,tourneysize=max(ceiling(popsize/10),2),mutprob=0.01,mutfrac=NULL,initpop=NULL,verbose=0,cluster=NULL,sharedmemory=FALSE,...)Argumentsn The maximum permissible index(i.e.,the size of the set we are doing subset selection from).The algorithm chooses a subset of integers from1to n.k The number of indices to choose(i.e.,the size of the subset).OF The objective function.Thefirst argument of OF should be an index vector of length k containing integers in the range[1,n].Additional arguments can bepassed to OF through....popsize The size of the population;equivalently,the number of offspring produced each generation.keepbest The keepbest leastfit offspring each generation are replaced by the keepbest mostfit members of the previous ed to implement elitism.ngen The number of generations to run.tourneysize The number of individuals involved in each tournament at the selection stage.mutprob The probability of mutation for each of the k chosen indices in each individual.An index chosen for mutation jumps to any other unused index,uniformly atrandom.This probability can be set indirectly through mutfrac.mutfrac The average fraction of offspring that will experience at least one mutation.Equivalent to setting mutprob to1-(1-mutfrac)^(1/k).Only used if mutprobis not supplied.This method of controlling mutation may be preferable if thealgorithm is being run at different values of k.initpop A popsize-by-k matrix of starting solutions.Thefinal populations from one GA search can be passed as the starting point of the next search.Possibly usefulif using this function in an adaptive,iterative,or parallel scheme(see examples).verbose An integer controlling the display of progress during search.If verbose takes positive value v,then the iteration number and best objective function value aredisplayed at the console every v generations.Otherwise nothing is displayed.Default is zero(no display).cluster If non-null,the objective function evaluations for each generation are done in parallel.cluster can be either a cluster as produced by makeCluster,or an in-teger number of parallel workers to use.If an integer,makeCluster(cluster)will be called to create a cluster,which will be stopped on function exit.sharedmemory If cluster is non-null and sharedmemory is TRUE,the parallel computation will employ shared-memory techniques to reduce the overhead of repeatedly passingthe population matrix to worker es code from the Rdsm package,which depends on bigmemory....Additional arguments passed to OF.Details•Tournament selection involves creating mating"tournaments"where two groups of tourneysize solutions are selected at random without regard tofitness.Within each tournament,victors arechosen by weighted sampling based on within-tournamentfitness ranks(larger ranks given tomorefit individuals).The two victors become parents of an offspring.This process is carriedout popsize times to produce the new population.•Crossover(reproduction)is carried out by combining the unique elements of both parents andkeeping k of them,chosen at random.•Increasing tourneysize will put more"selection pressure"on the choice of mating pairs,andwill speed up convergence(to a local optimum)accordingly.Smaller tourneysize valueswill conversely promote better searching of the solution space.•Increasing the size of the elite group(keepbest)also promotes more homogeneity in thepopulation,thereby speeding up convergence.ValueA list of S3class"GAsearch"with the following elements:bestsol A vector of length k holding the best solution found.bestobj The objective function value for the best solution found.pop A popsize-by-k matrix holding thefinal population,row-sorted in order of in-creasing objective function.Each row is an index vector representing one solu-tion.obj The objective function values corresponding to each row of pop.old A list holding information about the search progress.Its elements are:old$best The sequence of best solutions known over the course of the search(an(ngen+1)-by-k matrix)old$obj The sequence of objective function values corresponding to the solutions inold$bestold$avg The average population objective function value over the course of the search(a vector of length ngen+1).Useful to give a rough indication of populationdiversity over the search.If the averagefitness is close to the bestfitness in thepopulation,most individuals are likely quite similar to each other.Notes on parallel evaluationSpecifying a cluster allows OF to be evaluated over the population in parallel.The population of solutions will be distributed among the workers in cluster using static dispatching.Any cluster produced by makeCluster should work,though the sharedmemory option is only appropriate for a cluster of workers on the same multicore processor.Solutions must be sent to workers(and results gathered back)once per generation.This introduces communication overhead.Overhead can be reduced,but not eliminated,by setting sharedmemory=TRUE.The impact of parallelization on run time will depend on how the run time cost of evaluationg OF compares to the communication overhead.Test runs are recommended to determine if parallel execution is beneficial in a given situation.Note that only the objective function evaluations are distributed to the workers.Other parts of the al-gorithm(mutation,crossover)are computed serially.As long as OF is deterministic,reproducibility of the results from a given random seed should not be affected by the use of parallel computation.ReferencesMark A.Wolters(2015),“A Genetic Algorithm for Selection of Fixed-Size Subsets,with Appli-cation to Design Problems,”Journal of Statistical Software,volume68,Code Snippet1,available online.See Alsoplot.GAsearch plot method,print.GAsearch print method,and summary.GAsearch summary method.Examples#---Find the four smallest numbers in a random vector of100uniforms---#Generate the numbers and sort them so the best solution is(1,2,3,4).Numbers<-sort(runif(100))Numbers[1:6]#-View the smallest numbers.ObjFun<-function(v,some_numbers)sum(some_numbers[v])#-The objective function.ObjFun(1:4,Numbers)#-The global minimum.out<-kofnGA(n=100,k=4,OF=ObjFun,ngen=50,some_numbers=Numbers)#-Run the GA.summary(out)plot(out)##Not run:#Note:the following two examples take tens of seconds to run(on a2018laptop).#---Harder:find the50x50principal submatrix of a500x500matrix s.t.determinant is max---#Use eigenvalue decomposition and QR decomposition to make a matrix with known eigenvalues.n<-500#-Dimension of the matrix.k<-50#-Size of subset to sample.eigenvalues<-seq(10,1,length.out=n)#-Choose the eigenvalues(all positive).L<-diag(eigenvalues)RandMat<-matrix(rnorm(n^2),nrow=n)Q<-qr.Q(qr(RandMat))M<-Q%*%L%*%t(Q)M<-(M+t(M))/2#-Enusre symmetry(fix round-off errors).ObjFun<-function(v,Mat)-(determinant(Mat[v,v],log=TRUE)$modulus)out<-kofnGA(n=n,k=k,OF=ObjFun,Mat=M)print(out)summary(out)plot(out)#---For interest:run GA searches iteratively(use initpop argument to pass results)---#Alternate running with mutation probability0.05and0.005,50generations each time.#Use the same problem as just above(need to run that first).mutprob<-0.05result<-kofnGA(n=n,k=k,OF=ObjFun,ngen=50,mutprob=mutprob,Mat=M)#-First run(random start) allavg<-result$old$avg#-For holding population average OF valuesallbest<-result$old$obj#-For holding population best OF valuesfor(i in2:10){if(mutprob==0.05)mutprob<-0.005else mutprob<-0.05result<-kofnGA(n=n,k=k,OF=ObjFun,ngen=50,mutprob=mutprob,initpop=result$pop,Mat=M)allavg<-c(allavg,result$old$avg[2:51])allbest<-c(allbest,result$old$obj[2:51])}plot(0:500,allavg,type="l",col="blue",ylim=c(min(allbest),max(allavg)))lines(0:500,allbest,col="red")legend("topright",legend=c("Pop average","Pop best"),col=c("blue","red"),bty="n", lty=1,cex=0.8)summary(result)##End(Not run)6print.GAsearch plot.GAsearch Plot method for the GAsearch class output by kofnGA.DescriptionArguments type,lty,pch,col,lwd Can be supplied to change the appearance of the lines produced by the plot method.Each is a2-vector:thefirst element gives the parameter for the plot of average objective function value,and the second element gives the parameter for the plot of the minimum objective function value.See plot or matplot for description and possible values.Usage##S3method for class GAsearchplot(x,type=c("l","l"),lty=c(1,1),pch=c(-1,-1),col=c("blue","red"),lwd=c(1,1),...)Argumentsx An object of class GAsearch,as returned by kofnGA.type Controls series types.lty Controls line types.pch Controls point markers.col Controls colors.lwd Controls line widths.ed to pass other plot-control arguments.print.GAsearch Print method for the GAsearch class output by kofnGA.DescriptionPrint method for the GAsearch class output by kofnGA.Usage##S3method for class GAsearchprint(x,...)Argumentsx An object of class GAsearch,as returned by kofnGA....Included for consistency with generic functions.print.summary.GAsearch7 print.summary.GAsearchPrint method for the summary.GAsearch class used in kofnGA.DescriptionPrint method for the summary.GAsearch class used in kofnGA.Usage##S3method for class summary.GAsearchprint(x,...)Argumentsx An object of class summary.GAsearch....Included for consistency with generic functions.summary.GAsearch Summary method for the GAsearch class output by kofnGA.DescriptionSummary method for the GAsearch class output by kofnGA.Usage##S3method for class GAsearchsummary(object,...)Argumentsobject An object of class GAsearch,as returned by kofnGA....Included for consistency with generic functions.Index∗designkofnGA,2∗optimizekofnGA,2kofnGA,2,2,6,7kofnGA-package,2makeCluster,3,4plot.GAsearch,4,6print.GAsearch,4,6print.summary.GAsearch,7summary.GAsearch,4,78。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 School of Computer Science and Engineering, Hunan University of Science and Technology, Xiangtan 411201, China 2 School of Computer, Wuhan University, 430072, China * The corresponding author, email: mrtly2@
Received: Jan. 23, 2017 Revised: Feb. 2, 2019 Editor: Feifei Gao
24
Abstract: Data transmission among multicast trees is an efficient routing method in mobile ad hoc networks (MANETs). Genetic algorithms (GAs) have found widespread applications in designing multicast trees. This paper proposes a stable quality-of-service (QoS) multicast model for MANETs. The new model ensures the duration time of a link in a multicast tree is always longer than the delay time from the source node. A novel GA is designed to solve our QoS multicast model by introducing a new crossover mechanism called leaf crossover (LC), which outperforms the existing crossover mechanisms in requiring neither global network link information, additional encoding/decoding nor repair procedures. Experimental results confirm the effectiveness of the proposed model and the efficiency of the involved GA. Specifically, the simulation study indicates that our algorithm can obtain a better QoS route with a considerable reduction of execution time as compared with existing GAs. Keywords: Quality-of-Service (QoS); multicast; genetic algorithm; leaf crossover
I. INTRODUCTION
Multicast is a routing way which denotes transmitting messages from one source to a
group of aim nodes. The most efficient method of multicast is forwarding the packets along a tree that spanning the source node to aim nodes. Quality-of-service (QoS) multicast routing, which aims at finding an optimal route based on QoS metrics such as end-to-end delay, is a well-known Steiner tree problem, which turns out to be NP-complete[1,2]. QoS multicast routing is a common communication way in mobile ad hoc networks (MANETs) given the multi-hop nature of ad hoc networks.
COMMUNICATIONS THEORIES & SYSTEMS
A Novel Genetic Algorithm for Stable Multicast Routing in Mobile Ad Hoc Networks
Qiongbing Zhang1,*, Lixin Ding2, Zhuhua Liao1
As figure 1 depicts, the start node is 1, the set of aim nodes is{3,5,6,9,10} and Cost(i,j), Delay(i,j) are the values of cost and transmission delay of the link between node i and j respectively. The multicast goal is to find a tree connecting the start node and aim nodes in this connected graph with the minimal summation of Cost and satisfying constraints of Delay.