PLC实现伺服电机多段速运动控制1资料
情景二 项目五 基于PLC的多段速控制
0~
120H 0.1Hz
—
z
0~
12机z0H 电0工.1Hz程学—院
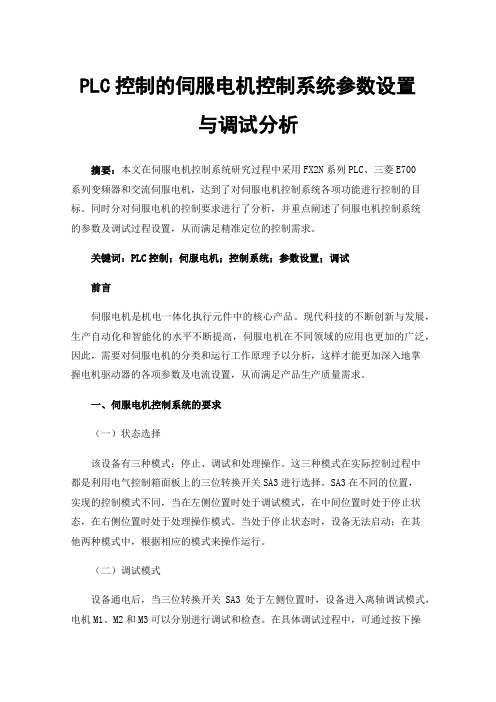
七段速运行
七段速对应的参数号和端子
1234
5
6
7
RH 1 0 0 0
1
1
1
RM 0 1 0 1
0
1
1
RL 0 0 1 1
1
0
1
参数号 Pr.4 Pr.5 Pr.6 Pr.24 Pr.25 Pr.26 Pr.27
Date: 2020/3/1
1.所需主要设备
序号 1 2 3
三相电源
名称
单相交流单元
变频器
4
三相笼型异步电动机
交流接触器 5
无熔断丝断路器(NFB) 6
电位器 7
三联按钮 8
型号与规格 ~3×380/220V,20A ~220V和36V,5A 三菱FR-S500
Y100L1-4 CJX1-9 NFB-33S/ NFB-32S, 5A 1KΩ,2W LA4-3H
参显 数示
名称
30 P30 扩张功能显示选择
P24 多段速度设定(4速) 24
P25 多段速度设定(5速) 25
P26 多段速度设定(6速) 26
P27 多段速度设定(7速)
27 Page: 4
设定 最小设 出厂时 范围 定单位 设定
0,1
1
0
0~
120H 0.1Hz
—
z
0~
120H 0.1Hz
—
z
Date: 2020/3/1
Page: 17
机电工程学院
谢谢
Date: 2020/3/1
Page: 18
基于PLC与HMI的伺服电机运动控制系统设计与实现

基于PLC与HMI的伺服电机运动控制系统设计与实现摘要:随着计算机技术、可编程控制器及触摸屏科技的进步,现在机械制造行业几种控制系统越来越多的被应用到处理复杂事务中使其变得处理简易,在生活中,几种控制系统的应用提高了生产效率,使我们生活变得简单化,提高了机械产品的安全性和可操作性。
本文提出了选用S7-200SMARTCPUST30PLC为主控制器,发送脉冲指令作为伺服驱动器的输入信号,通过伺服驱动器实现对伺服电机前/后点动及连续运转、相对/绝对位置的精确控制以及自动查找参考点等操作,由SMART1000IEV3触摸屏搭建监控画面的思路。
关键词:伺服电机;PLC;运动控制;HMI1、系统总体方案设计1.1PLC和HMI简介1.1.1可编程里辑控制器简介可编辑逻辑控制器简称PLC,能够适应工作环境较为恶劣的条件,适用范围较广。
另外,PLC的维护较为方便,使用可靠性比较高。
CPU的运行状态是决定系统流畅的重要保证,而PLC的工作状态就是通过软件控制CPU的运行情况,当然通过硬件开关进行强制控制也是一种有效的控制手段,比如在进行测试阶段或者对系统进行检修时,硬件控制是一种较为方便的方式。
1.1.2 HMI简介随着我国工业水平提高,在生产过程中生产工艺越来越复杂,生产设备也在不断更新换代,生产控制人员不仅仅要对生产的每个流程熟知,还要对设备运行状况了解,做到设备运转的透明化。
HMI便是实现人机互通的关键技术,它实现了工作人员与机器之间的可靠连接。
在工作人员与Wincc flexible之间,HMI是实现二者链接的重要接口。
在控制器与Wincc flexible之间也同样需要这样的接口。
1.2 总体方案设计整个系统分为硬件设计、PLC程序设计、HMI与PLC通讯、系统实验调试共4部分。
硬件方面,主控制器选用S7-200SMARTCPUST30PLC,发送脉冲指令作为台达伺服驱动器(ASDA-B2-0121-B)的输入信号;通过伺服驱动器实现控制伺服电机(ASDAB2)的旋转速度和驱动丝杆滑台的移动位置[1]。
变频器多段调速的PLC控制
图5-2-3 变频器多段调速的 PLC控制项目实物模拟接线图
PLC原理及应用
项目实施 (五)程序编写
PLC原理及应用
图5-2-4 变频器多段调速的PLC控制项目状态转移图
项目实施 (五)程序编写
PLC原理及应用
图5-2-5 变频器多段调速的PLC控制项目梯形图程序
项目实施 (五)程序编写
PLC原理及应用
输入端(I)
输出端(O)
外接元件
输入端子
外接元件
输出端子
起动按钮SB1
X0
变频器STF端子
Y0
停止按钮SB2
X1
变频器RH端子
Y1
变频器RM端子
Y2
变频器RL端子
Y3
PLC原理及应用
项目实施
(二)画出PLC的 I/O接线图
PLC原理及应用
图5-2-2 变频器多段调速的PLC控制项目电气接线原理图
项目实施
备注
“1”表示外接开关接通,“0”表示外接开关断开
PLC原理及应用
项目知识准备
2.用PLC控制变频器实现调速的方法
用变频器进行调速,可将变频器的调速参数预先内部设 定,再用变频器的调速输入端子进行选择切换,用PLC进 行控制时,PLC的输出端子控制变频器的调速输入端子, 通过运行PLC程序实现控制。
PLC原理及应用
项目实施
(六)程序调试 2.输入程序并传送到PLC,然后运行调试, 看是否符合要求,否则要检查接线、变频器 参数及PLC程序,直至按要求运行。
(1)按下起动按钮SB1,电动机先以30Hz的速 度运行6s,后转为以40Hz的速度运行10s,再转为 以60Hz的速度运行10s,然后停止运行。运行时观 察变频器显示的频率是否正确。
实训8 PLC和变频器联机实现多段速频率控制

ON
ON
固定频率3
实训内容
1、画出硬件接线图
~380V QS +24V SB1 SB2 L1 L2 L3
I0.0 I0.1
Q0.0 Q0.1 Q0.2
5 6 7 +24V 8 9 0V
选择固定频率设定值
(5)控制工艺设置 序号 16 17 18 19 20 21 22 23 参数号 P0003 P0004 P0701 P0702 P0703 P0003 P0004 P1001 出厂值 1 0 1 1 1 1 0 0 设置值 2 7 17 17 1 2 10 10 命令和数字I/O 选择固定频率 选择固定频率 ON接通正转,OFF停止 设用户访问级扩展级 设定值通道和斜坡函数发生器 设置固定频率1(Hz) 说明 设用户访问级扩展级
24
25
P1002
P1003
5
10
20
-50
设置固定频率2(Hz)
设置固定频率3(Hz)
7、运行调试及操作控制
将PLC置于运行模式,开启程序状态监控。 (1)按照变频器外部接线图完成变频器的接线,认真检查, 确保正确无误。
(2)打开电源开关,按照参数功能表正确设置变频器参数。 (3)按下起动按钮SB2,电动机起动并运行在第一段,频 率为10Hz。 (4)延时20s后电动机运行在第二段,频率为20Hz。 (5)再延时10s后电动机反向运行在第三段,频率为50Hz。 (6)按下停止按钮SB1 ,电动机停止运行。
MM420
PLC
M 3~
2、列出I/O地址分配表
伺服控制 s曲线加减速 plc实现方法

伺服控制 s曲线加减速 plc实现方法《伺服控制 S 曲线加减速 PLC 实现方法》一、引言在工业自动化领域,伺服控制是一种重要的运动控制方式。
而 S 曲线加减速则是伺服系统中常用的一种运动控制曲线。
本文将就伺服控制中 S 曲线加减速的原理和 PLC 实现方法进行探讨,以帮助广大读者更好地理解和应用这一技术。
二、伺服控制概述伺服控制是一种高精度、高灵敏度的运动控制方式,通常应用于需要精准控制位置、速度和力的场合。
相比于传统的步进控制,伺服控制具有响应速度快、稳定性好的优势,因此在工业机械、医疗设备、航空航天等领域得到广泛应用。
在伺服控制中,S 曲线加减速是一种控制曲线。
它的特点是在起始和终止阶段速度变化缓慢,中间阶段速度加速度和减速度比较快,可以有效减少运动过程中的冲击和震动,提高系统的稳定性和精度。
三、S 曲线加减速原理S 曲线加减速的原理是基于数学模型来实现的。
通常采用三次多项式来描述其速度和位置随时间的变化规律。
在运动开始和结束阶段,速度变化较慢,而在中间阶段速度变化迅速,如同 S 形曲线一般。
这种曲线实现了平滑的加减速过程,避免了突变和冲击,提高了系统运动的平稳性和控制的精度。
四、PLC 实现 S 曲线加减速的方法在工业实际应用中,控制系统通常采用 PLC(可编程逻辑控制器)来实现 S 曲线加减速。
PLC 是一种专门用于工业控制的计算机,具有高速、稳定的特点,可以实现复杂的控制算法。
- 利用 PLC 的高速计算能力,可以通过编程实现 S 曲线加减速算法,包括速度和位置的控制。
- 在 PLC 编程中,可以利用三次多项式或其他数学模型来描述 S 曲线加减速的规律,然后通过控制输出信号来实现伺服系统的速度控制。
- 还可以结合传感器反馈的位置和速度信息,实现闭环控制,从而进一步提高系统的稳定性和精度。
五、个人观点和理解S 曲线加减速在伺服控制中的应用不仅可以提高系统的运动平稳性和控制精度,还可以减少系统在运动过程中的震动和冲击,从而延长了系统的使用寿命。
毕业设计(论文)-基于PLC控制的多段调速系统实现
摘要随着工业控制要求的发展,对电机速度的控制越来越高。
传统的模拟信号控制方式存在抗干扰能力差、对设备要求复杂、控制精度不高等问题,难以适应日益复杂的工业环境。
本文主要介绍了多段调速系统的结构,并完成了以PLC为控制器,以增量式光电编码器为速度采集的闭环PID控制系统,通过RS-485对变频器的控制实现了三相异步电机的多段调速。
关键字:PLC;RS-485;多段调速;光电编码器AbstractWith the requirements of the development of industrial control, the speed of motor control is more and more strict. The traditional analog signal control mode has poor capacity of resisting disturbance, the requirement of complex equipment, the control precision low and some other problems, it is difficult to adapt to the increasingly complex industrial environment. In this article, mainly introduces the structure of various speed system, and completed the closed loop PID control system through the PLC as controller and incremental photoelectric encoder for speed acquisition, achieve the multistage speed control three-phase asynchronous motor through Frequency converter based on RS-485.Key words: PLC; RS-485; multistage speed; encoder目录第一章概述 (4)1.1 课题研究的背景及意义 (4)1.2 课题研究现状 (5)1.3 本课题研究的主要内容 (6)第二章系统分析 (7)2.1 PLC基本知识 (7)2.1.1 PLC的基本功能 (8)2.1.2 PLC的特点 (9)2.1.3 PLC的展望 (11)2.2 变频器基本知识 (12)2.2.1 变频器的应用 (12)2.2.2 变频器的分类 (13)2.2.3 变频器控制的展望 (14)2.3 光电编码器 (15)2.3.1 增量式编码器 (15)2.3.2 绝对式编码器 (16)第三章系统设计 (19)3.1 总体方案 (19)3.2 硬件设计 (19)3.2.1 变频器的连接 (20)3.2.2 光电编码器的配置 (20)3.2.3 PLC输入输出口分配 (21)3.3 软件设计 (21)3.3.1 变频器的参数设置 (22)3.3.2 PLC的设计 (23)第四章结论 (28)结束语 (29)致谢 (30)参考文献 (31)第一章概述1.1 课题研究的背景及意义随着计算机技术、电子技术的不断进步,PLC(可编程逻辑控制器)技术、变频(变频器)调速技术的发展极为迅速,已渗透到各个领域,以它们为主导的现代生产技术正以史无前例的速度迅猛发展。
运用PLC和变频器实现电机多段调速
运用 PLC和变频器实现电机多段调速摘要:近年变频调速技术获得良好的发展空间,其控制精度突出、调速便捷、节能效果突出,可以达到直流电动机调速状态。
但是在现代农业与工作快速发展的背景下,在自动化控制方面的要求更为严格,仅仅借助变频器调速已经无法进一步提高生产效率与质量,所以需要对PLC、变频器以及其他自动化工控设备进行综合使用,同时借助组态软件、人机界面等开展远程监控,是现代控制技术的主要发展方向。
PLC是对通信、自动化控制以及计算机等技术进行融合的技术设备,因为其低成本、维修便捷、抗干扰能力突出、可靠性高、组合灵活等特点,在自动化领域具有重要作用,在自动化控制中有着广泛应用。
关键词:PLC;变频器;调速1 PLC与变频器概述1.1 PLC概述PLC工作形式较为直观,采用循环扫描的方式。
借助编程软件将用户程序输入、储存到PLC用户储存器中,PLC工作过程中对用户程序进行执行,在操作过程中,无法同时操作多个,需要根据分时原理开展。
由此,即能够借助PLC正常运行执行程序。
工作流程主要涵盖以下阶段,采样输入、执行程序以及刷新输出。
在PLC编程语言中,梯形图是应用较多的形象,PLC电路符号、表达方式和继电器电路原理图较为相似。
为了提高PLC抗干扰水平,引进了相关硬件和软件抗干扰手段。
PLC虽然具有较高科技含量,然而实际操作中并不复杂,同时调试和维护工作也较为便捷。
1.2 变频器概述变频器涵盖主电路与控制电路等零部件,可以借助下式进行变频原理表述:,对极对数P进行调整,能够实现电动机调速的目的,对S进行调整能够实现电机转差率调速,对f1进行调整能够促使异步电机电源频率发生变化。
一般情况下,调整电源频率是调速的主要方法。
借助科学分析三相异步电机和相关等效电路,获得:E1=ΔU+U1,基于E1和f1较大的情况,定子漏阻抗会减少,可以不计算ΔU,即可以获得定子电压,因此。
借助相关推理公式与科学计算能够获得:U1/f1=常数,即可以借助控制U1对E1进行控制。
plc与变频器多段速度控制系统的设计毕业设计说明书[管理资料]
![plc与变频器多段速度控制系统的设计毕业设计说明书[管理资料]](https://img.taocdn.com/s3/m/67216e0afab069dc5122013a.png)
常州轻工职业技术学院电子电气工程系毕业设计常州轻工职业技术学院题 目 PLC 与变频器多段速度控制系统的设计姓 名学 号 1036623116班 级 10自动试点班指导教师职 称 副 教 授日 期 2013年5月毕业设计(论文)说明书中文摘要本文主要简介了可编程控制器与变频器在现代工业调速方面的应用。
着重讲解了多段调速的使用。
硬件上使用的是三菱可编程控制器中的FX3U-48M和三菱变频器。
如今,变频调速已被公认为是最理想、最有发展前途的调速方式之一,采用变频器构成变频调速传动系统能满足提高劳动生产率、改善产品质量、提高设备自动化程度、提高生活质量及改善生活环境等要求。
变频器的作用是改变交流电机供电的频率和幅值,因而改变其运动磁场的周期,达到平滑控制电动机转速的目的。
变频调速器调速不仅操作方便,故障率低,且节能效果明显,优于调压调速、变级调速、滑差调速、串级调速、整流子调速和液力偶合器调速等。
并且变频调速在电动机运行时很容易实现电动机的正、反转。
只需要改变变频器内部逆变管的开关顺序,即可实现输出换相,也不存在因换相不当而烧毁电动机的问题。
通过可编程控制器来控制变频器调速,是现代工业应用最为广泛的调速方法之一,所以本文主要研究的就是通过可编程控制器来控制变频器改变交流电机供电的频率和幅值,从而改变其运动磁场的周期,达到平滑控制电动机转速的目的。
关键词:可编程控制器,变频器,工业调速,变频调速ABSTRACTThis paper mainly introduces the programmable controller and inverter in modern industrial control on multiple segments hardware is used on Mitsubishi programmable controller in FX3U-48M and Mitsubishi , VVVF has been recognized as the most ideal, the most promising control one way, using PLC variable frequency speed control system can meet the needs of improving labor productivity, improve product quality, improve the degree of automation equipment, improve the quality of life and improve the living environment and other requirements.Inverter AC motor power supply is used to change the frequency and amplitude, and thus change its motion magnetic cycle, so as to achieve the smooth control of motor speed conversion speed governor has the advantages of convenient operation, low failure rate, and has obvious energy-saving effect, better than the voltage regulating speed, variable speed control, slip control, cascade control, speed control and hydraulic coupler speed variable frequency speed regulation in the motor run time is easy to achieve the motor is, need to change the frequency converter inverter tube inside the switching sequence, you can achieve the output exchange phase, there is no improper burning of the electric motor by phase change problems.Through the programmable controller to control the frequency converter, is a modern industrial application is most wide speed regulation method, so this paper mainly studies is that through the programmable controller to control the frequency converter to change the frequency and amplitude of the AC motor power supply, so as to change the moving magnetic field cycle, so as to achieve the smooth control of motor speed to.Keywords:Programmable controller, inverter, industrial control, variable frequency speed regulation目录第一章概述 (6)课题背景 (6)PLC的发展历程 (6)PLC的分类 (6)PLC的应用领域 (8)变频器基本原理与应用 (8)课题的目的和意义 (9)课题的目的 (9)课题的意义 (11)课题任务及要求 (11)课题的主要任务 (12)课题的主要要求 (12)第二章设计内容简介 (13)课题目前研究及应用现状 (13)设备的结构分析 (13)第三章PLC实现的过程 (15)工作流程 (15)工作过程叙述 (15)工作过程示意图 (15)PLC的I/O分配表 (15)PLC控制的设备清单及原理图 (17)元器件设备清单 (17)PLC控制的原理图 (17)梯形图及程序指令表 (18)梯形图 (18)程序指令表 (23)第四章控制装置的柜屛设计及安装调试 (27)元件安装图 (27)控制柜与操作屏设计图 (28)参考文献 (30)致谢 (31)第一章概述课题背景可编程逻辑控制器,英文称Programmable Logic Controller,简称PLC,它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计,PLC由CPU,存储器、I/0接口、内嵌的精简高效操作系统组成。
基于S7-1200 PLC的伺服电机运动控制系统设计

4结语在大数据时代,信息安全要求不断提高,网络规模飞速扩展,使安全事件的监控和分析变得尤为重要。
本文通过构建安全防护日志管理系统,增强了安全监控的实时性,提升了网络安全感知能力。
未来还将收集应用系统、服务器日志等信息,通过更多维度的关联分析,结合科学算法,进一步完善分析手段和风险预警能力,为保障运营商网络信息安全提供支持。
[参考文献][1]饶琛琳.ELK Stack 权威指南[M].2版.北京:机械工业出版社,2017.[2]段娟.基于Web 应用的安全日志审计系统研究与设计[J].信息网络安全,2014(10):70-76.[3]冯立.基于粗糙集理论的安全日志分析模型[J].计算机工程,2002,28(11):164-166,182.[4]李晨光.UNIX/Linux 网络日志分析与流量监控[M].北京:机械工业出版社,2014.[5]杨秋翔.基于时间序列的多源日志安全数据挖掘仿真[J].计算机仿真,2019,36(2):297-301.收稿日期:2019-09-29作者简介:张延盛(1986—),男,江苏南京人,硕士研究生,工程师,研究方向:数据库与信息系统。
基于S7-1200PLC 的伺服电机运动控制系统设计李虹静(华中科技大学工程实训中心,湖北武汉430074)摘要:S7-1200作为西门子公司一款紧凑型PLC ,具有稳定性好、可靠性强的特点,同时还具备强大的运动控制功能。
现首先介绍了伺服电机运动控制系统的设计要求,然后针对台达B2系列伺服器工作特性,从台达B2系列伺服驱动器与西门子S7-1200PLC 的硬件设计入手,阐述了B2系列伺服驱动器参数调节的原理和步骤,最后通过在TIA 博途V15软件中对运动轴进行组态和编程,并利用S7-1200PLC 的PTO 功能实现了精准的运动控制。
关键词:S7-1200PLC ;伺服电机;运动控制;PTO1伺服电机运动控制系统概述1.1运动控制模型本伺服电机运动控制系统采用如图1所示的运动控制模型搭建,其中伺服电机由台达B2系列伺服器驱动,通过调节伺服驱动器参数以及编写PLC 程序,可实现包括距离控制、旋转角度控制、定位控制、路径控制以及闭环控制在内的多种运动控制实验[1]。
基于PLC的变频器多段速调速系统设计_毕业设计 精品

陕西工业职业技术学院基于PLC的变频器多段速调速系统设计专业:机电一体化班级:机电1105班姓名:冯志超指导教师:司老师目录1 绪论 (1)2课题的背景 (1)背景分析......................................................................................................... 错误!未定义书签。
3 PLC 和变频器的介绍 (5)4 PLC 的结构及特点 (5)5 PLC 的工作原理 (7)6 PLC 的应用 (7)7 PLC 发展趋势 (8)8 PLC 控制变频器带电机多段速运行 (8)9变频器的介绍 (8)10变频器的控制方式 (9)11变频器的应用 (9)12 PLC 与变频器的组合 (10)13变频器和PLC 进行配合时所需注意的事项 (10)14变频调速系统 (11)15变频调速的基本控制方式 (11)16系统的控制要求..................................................................................... 1错误!未定义书签。
17方案的确定............................................................................................. 1错误!未定义书签。
18 S7-200 PLC ................................................................................................ 错误!未定义书签。
19MicroMaster420 变频器 (13)20外部电路设计 (14)21 变频开环调速 (14)22.按项目控制要求设计PLC和变频器 (15)23 PLC程序设计 (15)24变频器参数设置 (16)25任务拓展 (17)26项目实现 (17)附录 (20)结论 (23)致谢 (24)参考文献 (25)绪论课题的背景最先制成电动机的人是德国的雅可比,在两个u 型电磁铁中间,装一六臂轮,每臂带两根棒型磁铁。
PLC控制的伺服电机控制系统参数设置与调试分析
PLC控制的伺服电机控制系统参数设置与调试分析摘要:本文在伺服电机控制系统研究过程中采用FX2N系列PLC、三菱E700系列变频器和交流伺服电机,达到了对伺服电机控制系统各项功能进行控制的目标。
同时分对伺服电机的控制要求进行了分析,并重点阐述了伺服电机控制系统的参数及调试过程设置,从而满足精准定位的控制需求。
关键词:PLC控制;伺服电机;控制系统;参数设置;调试前言伺服电机是机电一体化执行元件中的核心产品。
现代科技的不断创新与发展,生产自动化和智能化的水平不断提高,伺服电机在不同领域的应用也更加的广泛,因此,需要对伺服电机的分类和运行工作原理予以分析,这样才能更加深入地掌握电机驱动器的各项参数及电流设置,从而满足产品生产质量需求。
一、伺服电机控制系统的要求(一)状态选择该设备有三种模式:停止、调试和处理操作。
这三种模式在实际控制过程中都是利用电气控制箱面板上的三位转换开关SA3进行选择。
SA3在不同的位置,实现的控制模式不同,当在左侧位置时处于调试模式,在中间位置时处于停止状态,在右侧位置时处于处理操作模式。
当处于停止状态时,设备无法启动;在其他两种模式中,根据相应的模式来操作运行。
(二)调试模式设备通电后,当三位转换开关SA3处于左侧位置时,设备进入离轴调试模式,电机M1、M2和M3可以分别进行调试和检查。
在具体调试过程中,可通过按下操作界面的“开始”按钮开展调试;当速度发生改变后,可以直接切换操作,如果需要改变方向,则必须先按下“停止”按钮,对具体的方向予以重新选择,然后开始调试;在处于调试变频电机M2时,通过选择或检查两个按钮来组合其三个速度段。
调试过程也是非常关键的环节。
进入加工操作模式前,需要对电机的运行方向和速度等实施合理的调整,并由专业人员检查是否存在错误的情况,最后进入到运行模式中。
(三)加工模式设备通电结束后,当SA3放置在正确位置时,设备进入耦合处理操作模式。
当SQ1检测到工作台在原来的位置(A点)时,将控制箱上的SB5启动按钮按下,则控制箱上HL5灯保持亮起,设备启动。
plc控制变频器多段速运行
plc控制变频器多段速运行
一控制要求:
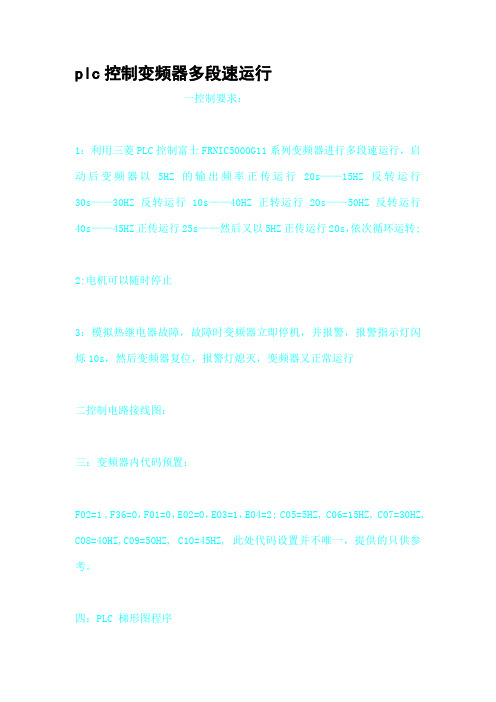
1:利用三菱PLC控制富士FRNIC5000G11系列变频器进行多段速运行,启动后变频器以5HZ的输出频率正传运行20s——15HZ反转运行30s——30HZ反转运行10s——40HZ正转运行20s——50HZ反转运行40s——45HZ正传运行25s——然后又以5HZ正传运行20s,依次循环运转;
2:电机可以随时停止
3:模拟热继电器故障,故障时变频器立即停机,并报警,报警指示灯闪烁10s,然后变频器复位,报警灯熄灭,变频器又正常运行
二控制电路接线图:
三:变频器内代码预置:
F02=1 ,F36=0,F01=0,E02=0,E03=1,E04=2; C05=5HZ, C06=15HZ, C07=30HZ, C08=40HZ,C09=50HZ, C10=45HZ, 此处代码设置并不唯一,提供的只供参考。
四:PLC 梯形图程序
说明:M为三菱PLC的辅助继电器,T为PLC内部定时器,T0-T199共200点是100ms定时器,如T0 K200表示定时时间是20s。
备注说明:此富士变频器最多可调15段速,控制端子是按照二进制代码排列,即变频器最多有四个端子控制。
感性趣的爱好者可试着加计数器进去,进行循环有限次的控制。
此程序系本人初学PLC所编写,较为罗嗦,已经经过了实验的检验。
有不妥或不合理的地方请多多指正。
PLC控制变频器多段速的编程方法设计
PLC控制变频器多段速的编程方法设计摘要:随着工业自动化的不断发展,PLC(可编程逻辑控制器)和变频器的应用越来越广泛。
变频器作为控制电机转速的重要设备,在许多工业领域中起着关键作用。
本文旨在研究和设计一种基于PLC的控制方法,实现变频器多段速控制。
首先对PLC和变频器的工作原理进行介绍,然后分析多段速控制的需求和优势。
接下来,提出了一种基于PLC编程的多段速控制方法,并详细说明了程序设计的步骤和关键要点。
最后,通过实验验证了该方法的可行性和有效性,并讨论了实验结果和进一步改进的可能性。
关键词:PLC;变频器;多段速控制;编程方法;引言:随着工业自动化水平的提升和生产流程的复杂化,对于电机的精确控制要求越来越高。
变频器作为一种常用的电机控制装置,通过调节电机的频率和电压,实现对电机转速的精确控制。
在许多工业领域中,如制造业、化工、石油和天然气等,多段速控制是一种常见的需求。
本文旨在研究和设计一种基于PLC的控制方法,以实现变频器多段速控制。
通过深入研究PLC和变频器的工作原理,分析多段速控制的需求和优势,并设计一套可行的编程方法,以提供给相关领域的工程师和技术人员参考和应用。
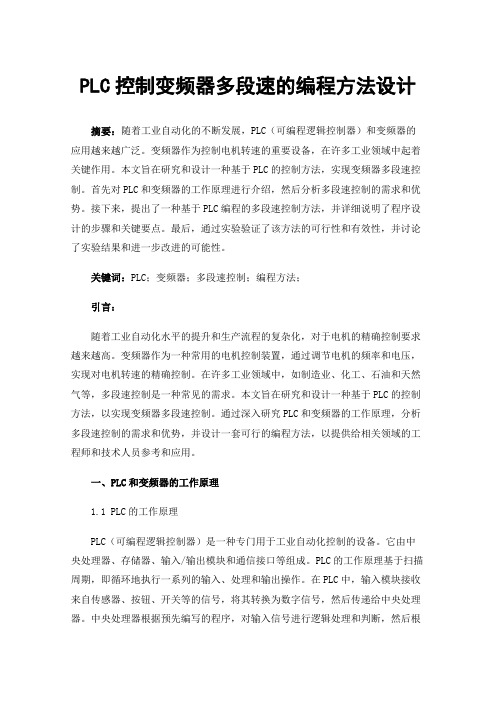
一、PLC和变频器的工作原理1.1 PLC的工作原理PLC(可编程逻辑控制器)是一种专门用于工业自动化控制的设备。
它由中央处理器、存储器、输入/输出模块和通信接口等组成。
PLC的工作原理基于扫描周期,即循环地执行一系列的输入、处理和输出操作。
在PLC中,输入模块接收来自传感器、按钮、开关等的信号,将其转换为数字信号,然后传递给中央处理器。
中央处理器根据预先编写的程序,对输入信号进行逻辑处理和判断,然后根据程序的逻辑和条件,控制输出模块输出相应的信号。
输出信号可以控制执行器、电磁阀、电机等设备的状态和动作。
PLC的工作原理可归纳为以下几个步骤:1. 输入信号采集:PLC的输入模块采集来自传感器或外部设备的信号,如开关状态、传感器检测到的物理量等。
变频技术及其应用单元2 任务2 PLC控制变频器的多段速调速控制

3.多段速度说明 1 当多段速度信号接通时,其优先级别高于主速度。 2 只有3段速度设定的场合,2段设定以上同时被选择时,低速
信号的设定频率优先,即以低速设定的信号频率运行。
3 Pr.24~Pr.27和Pr.232~Pr.239之间的设定没有优先级别。 4 运行期间参数值可以被改变。 5 当Pr.180~Pr.186改变端子分配时,其他功能可能受影响。设
一、分配输入点和输出点,写出I/O通道地址分配表 根据任务控制要求,可确定PLC需要5个输入点,14个
输出点,其I/O通道分配表见下表。
二、画出PLC控制变频器接线图
三、程序设计 本任务的梯形图
本任务的梯形图ຫໍສະໝຸດ 四、程序输入 启动MELSOFT系列GX Developer编程软件,首先创建新文件名,
任务2 PLC控制变频器的多段速调速控制
学习目标
1. 熟悉变频器和PLC实现组合控制的形式。 2. 掌握实现多段速调速的方法。 3. 理解多段速各参数的意义。 4. 能够进行PLC与变频器的连接和控制程序的编制。 5. 能独立完成PLC和变频器联机实现电动机多段速 运行电路的安装与调试。
一、多段速度相关知识 用变频器实现电动机的多段速控制,可通过开启、关闭外部触点信 号(RH、RM、RL)实现。通过RH、RM、RL的开关信号组合,最
表1
2.4段以上的多段速度设定(Pr.24~Pr.27,Pr.232~Pr.239) 通过RH、RM、RL、REX信号的组合可以进行速度4~15段速度的设定 。且在Pr.24~Pr.27,Pr.232~Pr.239设定运行频率。(初始值的状态为 不可以使用4速~15速设定。)REX信号输入所使用的端子应在Pr.178~ Pr.189(输入端子功能选择)设定为“8”,来进行端子功能的分配。
用PLSY指令控制

用plc控制两台伺服做两轴控制用PLSY指令控制步进电机实际上德国人有更好的办法,就是用真正的光学绝对值码盘的绝对值编码器,并同时输出正余弦信号,其绝对值信号也是用通讯形式输出,例如海德汉的EnDat,或STEGMANN的Hipeface,其时钟频率可在1MHz以上,虽然绝对值信号输出,仍然要编码-解码,速度快了,响应一样跟不上,但是不要忘了,其是真正光学刻线的绝对值,其响应不上并不丢脉冲。
并不影响精度,而只是滞后,这时,其同时输出的正余弦信号就有用了,既可以作为速度反馈(即时的),也可以作为高速定位的冗余,此高速定位是减速,等速度下来,仍然由高精度绝对信号定位停车,从而做到高速高精度。
用这种方法,编码器是贵了,但运动控制卡的成本就可以下来,这的确是种好方法,可惜,国内做运动控制的,基本是跟着日本人走,还很少有人认识到这种方法。
三菱PLC的PLSY指令我想实现步进电机旋转60° 我这样写对不对 PLSY k3000 k240 y3 步进电机的步距角是0.9不对的首先对脉冲输出仅限于y000或y001 也就是说不能指定y003一个脉冲是赚一个步距角吗plsy k3000 k66 y000PLSY K3000 K1548 Y3步距0.9的Y0和Y1同时输出PLSY指令是可以的(其实也不是同时,因为你得分别写两条这个指令,所以只能说是在同一扫描周期内执行而已.姑且认为是同时吧)如下:LD X0PLSY K1000 K2000 Y0PLSY K1000 K2000 Y1Y0和Y1的高速输出标志各是各的,不会互相影响.不可以同时执行同一个输出点的两条PLSY指令.首先用MT晶体管系列的,其次,最好不用PLSY指令,使用DIVR指令,可重复使用.对于脉冲输出来控制伺服电机,台达PLC完全可以胜任,而且已经有很多实际应用,PLSY/PLSR指令是脉冲输出控制指令,DRVI/DRVA/ZRN是专门定位指令,还有PWM脉宽调制指令都可以使用,其中PLSY是直接脉冲输出,PLSR是可以设置加减速时间脉冲输出指令.前几日改造设备,原设备用的PLC是三菱FX1N的,运动机构用的是安川的伺服电机。
基于三菱PLC和变频器的多段速控制应用
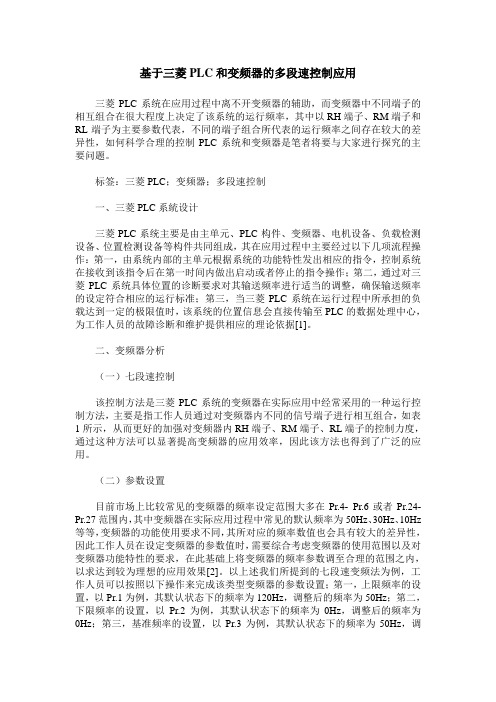
基于三菱PLC和变频器的多段速控制应用三菱PLC系统在应用过程中离不开变频器的辅助,而变频器中不同端子的相互组合在很大程度上决定了该系统的运行频率,其中以RH端子、RM端子和RL端子为主要参数代表,不同的端子组合所代表的运行频率之间存在较大的差异性,如何科学合理的控制PLC系统和变频器是笔者将要与大家进行探究的主要问题。
标签:三菱PLC;变频器;多段速控制一、三菱PLC系統设计三菱PLC系统主要是由主单元、PLC构件、变频器、电机设备、负载检测设备、位置检测设备等构件共同组成,其在应用过程中主要经过以下几项流程操作:第一,由系统内部的主单元根据系统的功能特性发出相应的指令,控制系统在接收到该指令后在第一时间内做出启动或者停止的指令操作;第二,通过对三菱PLC系统具体位置的诊断要求对其输送频率进行适当的调整,确保输送频率的设定符合相应的运行标准;第三,当三菱PLC系统在运行过程中所承担的负载达到一定的极限值时,该系统的位置信息会直接传输至PLC的数据处理中心,为工作人员的故障诊断和维护提供相应的理论依据[1]。
二、变频器分析(一)七段速控制该控制方法是三菱PLC系统的变频器在实际应用中经常采用的一种运行控制方法,主要是指工作人员通过对变频器内不同的信号端子进行相互组合,如表1所示,从而更好的加强对变频器内RH端子、RM端子、RL端子的控制力度,通过这种方法可以显著提高变频器的应用效率,因此该方法也得到了广泛的应用。
(二)参数设置目前市场上比较常见的变频器的频率设定范围大多在Pr.4- Pr.6或者Pr.24- Pr.27范围内,其中变频器在实际应用过程中常见的默认频率为50Hz、30Hz、10Hz 等等,变频器的功能使用要求不同,其所对应的频率数值也会具有较大的差异性,因此工作人员在设定变频器的参数值时,需要综合考虑变频器的使用范围以及对变频器功能特性的要求,在此基础上将变频器的频率参数调至合理的范围之内,以求达到较为理想的应用效果[2]。
伺服驱动的PLC控制
和步进电动机的控制,伺服电动机的控制与步进电 动机的基本相同,S7-300/400 PLC中也可以通过 FM模块实现步进和伺服控制,思路与S7-200 PLC 一致,本节不再介绍,
28
2.2 PLC的脉冲输出 • 1. 脉冲输出 PLS 指令 • 脉冲输出 PLS 指令功能为:使能有效时,检查用
4 编码器电缆 *内含A,A-,B,B-,U,V,W, *由于含用UVW相位信号,不需要另对伺 服电机磁极位置进行识别
• V80由代理商提供插头,客户自己做,长度最 长20米,V60的固定14 5米或10米,
1.2小型与经济型伺服控制系统SINAMICS V60/V80
• 5 通讯电缆
•
*与PLC脉冲信号进行通讯的电缆,
专题 伺服驱动
本章讲述的主要内容:
1 西门子伺服概述 2 伺服和步进电动机的脉冲控
制
2
1.1 伺服电机的介绍
• 伺服电动机伺服电机是一种传统的电机, 它是自动装置的执行元件,伺服电机的最 大特点是可控,在有控制信号时,伺服电机 就转动,且转速大小正比于控制电压的大小, 去掉控制电压后,伺服电机就立即停止转动, 伺服电机的应用甚广,几乎所有的自动控制 系统都需要用到,在家电产品中,例如录相 机、激光唱机等都是不可缺少的重要组成 部分,
19
1.2小型与经济型伺服控制系统SINAMICS V60/V80
20
1.2小型与经济型伺服控制系统SINAMICS V60/V80
21
1.2小型与经济型伺服控制系统SINAMICS V60/V80
22
1.2小型与经济型伺服控制系统SINAMICS V60/V80
S7-200SMARTPLC的运动控制向导

S7-200 SMART PLC的运动控制向导运动轴(Axis of Motion)内置于S7-200 SMART CPU 的运动控制功能使用运动轴(Axis of Motion)进行步进电机和伺服电机的速度和位置控制。
S7-200 SMART CPU 提供3个单轴控制,其组态方式与S7-200的EM253类似,S7-200 SMART CPU 目前未提供单独的运动控制模块。
其开环位置控制提供以下功能:1.提供高速控制(高速脉冲输出),速度从每秒2个脉冲到每秒100,000个脉冲(2HZ到100KHZ);2.提供可组态的测量系统,既可以使用工程单位(例如英寸和厘米)也可以使用脉冲数;3.提供可组态的反冲补偿;4.支持绝对、相对和手动位控方式;5.提供连续操作;6.提供多达32组移动曲线,每组最多可有16步;7.提供4种不同的参考点寻找模式,每种模式都可对起始的寻找方向和最终的接近方向进行选择。
8.支持急停(S曲线)或线性加速及减速。
9.提供SINAMICS V90驱动器的相关支持。
使用STEP7-Micro/ WIN SMART 可以创建运动轴所使用的全部组态。
这些组态和程序块需要一起下载到CPU中。
S7-200 SMART CPU 的运动控制能够实现主动寻找参考点功能,绝对运动功能,相对运动功能,单、双速连续旋转功能,速度可变功能(依靠AXISX_MAN指令实现)及曲线功能。
所有的轴功能都是单轴开环控制,系统不提供轴与轴之间的耦合及轴的闭环控制,如果有这方面需求,则用户需要自己搭建功能,但最终的应用效果要根据实际环境验证,西门子无法提供保证。
S7-200 SMART CPU 运动控制输入/输出点定义见表1:向输出或者A/B相输出,则P1被分配到Q0.3,但此时Axis2将不能使用。
组态 Axis of Motion :Micro/WIN SMART 提供了运动控制向导,可生成组态/曲线表和位控指令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文利用PLC实现伺服电机多段速运动控制院系:电气学院专业:楼宇智能化工程技术班级:楼宇1510姓名:谢浩指导老师:乔老师完成日期:2015.05.毕业设计任务学生姓名:谢浩班级;楼宇1510 学号:1230308151030 一、设计题目:利用PLC实现伺服电机多段速运动控制二、应完成的工作:1.任务(1)完成系统设计与调试(2)完成硬件电路及软件设计(3)完成设计报告2.要求:(1)利用台达PLC控制器 DOP-B触摸屏伺服电机伺服驱动器设计一个伺服电机多段速运动控制系统;(2)至少包含一段匀加速一段匀减速两段或两段以上匀速运动过程;(3)速度加减速时间可以通过界面输入(4)伺服电机的运动轨迹和状态(如:加速减速第一段匀速等)需要反应在界面系主任:科室负责人:指导老师:发题日期2015.03.25完成日期2015.05.10摘要可编程控制器(PLC)是以微处理器为核心,将自动控制技术、计算机技术和通信技术融为一体而发展起来的崭新的工业自动控制装置。
目前PLC已基本替代了传统的继电器控制而广泛应用于工业控制的各个领域,PLC已跃居工业自动化三大支柱的首位。
生产机械往往要求运动部件可以实现正反两个方向的起动,这就要求拖动电动机能作正、反向旋转。
由电机原理可知,改变电动机三相电源的相序,就能改变电动机的转向。
按下正转启动按钮SB1,电动机正转运行,且KM1,KMY接通。
2s后KMY断开,KM 接通,即完成正转启动。
按下停止按钮SB2,电动机停止运行。
按下反转启动按钮SB3,电动机反转运行,且KM2,KMY接通。
2s后KMY断开,KM接通,即完成反转启动。
关键词:台达PLC,伺服系统,触摸屏,伺服电机AbstractProgrammable controller (PLC) is a microprocessor as the core, the automatic control technology, computer technology and communication technology integration and the development of new industrial automatic control device. Currently PLC has basically replaced the traditional relay control and widely used in various fields of industrial control of PLC has leapt to the first of the three pillars of industrial automation.Machinery production often require moving parts can achieve both positive and negative direction of starting, which requires motor drive can make positive and reverse rotation. The motor theory, change the phase sequence of three-phase power motor, steering motor can change. Press forward start button SB1, motor forward operation, and KM1, KMY. 2S KMY opens, KM is switched on, to complete the forwardstart. SB2 press stop button, the motor stops running. Press the start button SB3,motor reversal operation, and KM2, KMY. 2S KMY opens, KM is switched on, to complete the start.Keywords: touch screen Delta PLC, servo system, servo motor目录摘要 (3)Abstract (4)1.1 PLC概述 (2)1.1.1 PLC产生 (2)1.1.2 PLC定义 (2)1.2 PLC应用 (3)1.3 PLC的基本结构 (4)1.3.1 CPU模块 (5)1.3.2 I/O模块 (5)1.3.3 存储器 (5)1.3.4 电源 (6)2.系统总体设计 (8)2.1 系统框图 (8)2.2 系统硬件模块 (8)2.2.1 PLC模块 (8)2.2.2 伺服驱动器 (9)2.2.3 伺服电机 (11)2.2.4 触摸屏 (13)本系统选择DOP-B10S411,实体图如图2.5所示。
(13)3.系统硬件设计 (17)3.1 PLC的特点 (17)3.2 伺服电机与步进电机 (18)3.3 PLC控制与继电器控制的比较 (19)3.4 PLC I/O分配表 (21)3.5 DOP-B10S41触摸屏功能特点 (21)第4章系统软件设计 (23)4.1 系统主流程图 (23)4.2 工作原理 (23)4.3 软件详细设计 (25)4.3.1 触摸屏设计及界面设计 (25)4.3.2步进梯形图 (25)4.3.3梯形图 (26)第5章.软、硬件调试及结果分析 (28)致谢 (31)参考文献 (32)第1章 PLC概述1.1 PLC概述1.1.1 PLC产生1969年,美国数字设备公司(DEC)研制出了世界上第一台可编程序控制器,并应用于通用汽车公司的生产线上。
当时叫可编程逻辑控制器PLC(Programmable Logic Controller),目的是用来取代继电器,以执行逻辑判断、计时、计数等顺序控制功能。
紧接着,美国MODICON公司也开发出同名的控制器,1971年,日本从美国引进了这项新技术,很快研制成了日本第一台可编程控制器。
1973年,西欧国家也研制出他们的第一台可编程控制器。
随着半导体技术,尤其是微处理器和微型计算机技术的发展,到70年代中期以后,特别是进入80年代以来,PLC已广泛地使用16位甚至32位微处理器作为中央处理器,输入输出模块和外围电路也都采用了中、大规模甚至超大规模的集成电路,使PLC在概念、设计、性能价格比以及应用方面都有了新的突破。
这时的PLC已不仅仅是逻辑判断功能,还同时具有数据处理、PID调节和数据通信功能,称之为可编程序控制器(Programmable Controller)更为合适,简称为PC,但为了与个人计算机(Persona1 Computer)的简称PC相区别,一般仍将它简称为PLC(Programmable Logic Controller)。
1.1.2 PLC定义“可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用了可编程序的存储器,用来在其内部存储和执行逻辑运算、顺序控制、定时、计数和算术运算等操作命令,并通过数字式和模拟式的输入和输出,控制各种类型的机械或生产过程。
可编程控制器及其有关外围设备,都按易于与工业系统联成一个整体、易于扩充其功能的原则设计。
”可编程序控制器是应用面最广、功能强大、使用方便的通用工业控制装置,自研制成功开始使用以来,它已经成为了当代工业自动化的主要支柱之一。
1.2 PLC应用目前,可编程序控制器已经广泛地应用在各个工业部门。
随着其性能价格比的不断提高,应用范围还在不断扩大,主要有以下几个方面:(1)逻辑控制可编程序控制器具有“与”、“或”、“非”等逻辑运算的能力,可以实现逻辑运算,用触点和电路的串、并联,代替继电器进行组合逻辑控制,定时控制与顺序逻辑控制。
数字量逻辑控制可以用于单台设备,也可以用于自动生产线,其应用领域最为普及,包括微电子、家电行业也有广泛的应用。
(2)运动控制可编程序控制器使用专用的运动控制模块,或灵活运用指令,使运动控制与顺序控制功能有机地结合在一起。
随着变频器、电动机起动器的普遍使用,可编程序控制器可以与变频器结合,运动控制功能更为强大,并广泛地用于各种机械,如金属切削机床、装配机械、机器人、电梯等场合。
(3)过程控制可编程序控制器可以接收温度、压力、流量等连续变化的模拟量,通过模拟量I/0模块,实现模拟量(Analog)和数字量(Digital)之间的A/D转换和D/A转换,并对被控模拟量实行闭环PID(比例-积分-微分)控制。
现代的大中型可编程序控制器一般都有PID闭环控制功能,此功能已经广泛地应用于工业生产、加热炉、锅炉等设备,以及轻工、化工、机械、冶金、电力、建材等行业。
(4)数据处理可编程序控制器具有数学运算、数据传送、转换、排序和查表、位操作等功能,可以完成数据的采集、分析和处理。
这些数据可以是运算的中间参考值,也可以通过通信功能传送到别的智能装置,或者将它们保存、打印。
数据处理一般用于大型控制系统,如无人柔性制造系统,也可以用于过程控制系统,如造纸、冶金、食品工业中的一些大型控制系统。
(5)构建网络控制可编程序控制器的通信包括主机与远程I/0之间的通信、多台可编程序控制器之间的通信、可编程序控制器和其他智能控制设备(如计算机、变频器)之间的通信。
可编程序控制器与其他智能控制设备一起,可以组成“集中管理、分散控制”的分布式控制系统。
当然,并非所有的可编程序控制器都具有上述功能,用户应根据系统的需要选择可编程序控制器,这样既能完成控制任务,又可节省资金。
1.3 PLC的基本结构可编程序控制器简称为PLC(Programmable Logic Controller),可编程序控制器实际上是一种工业控制计算机,它的硬件结构与一般微机控制系统相似,甚至与之无异。
可编程序控制器主要由CPU(中央处理单元)、存储器(RAM和EPROM)、输入/输出模块(简称I/O模块)、编程器和电源五大部分组成。
如图1.1所示为PLC的组成结构图。
图1.1 PLC组成结构1.3.1 CPU模块CPU模块又叫中央处理单元或控制器,它主要由微机处理器(CPU)和存储器组成。
CPU的作用类似于人类的大脑和心脏。
它采用扫描方式工作,每一次扫描要完成以下工作:(1)输入处理:将现场的开关量输入信号和数据分别读入输入映像寄存器和数据寄存器。
(2)程序执行:逐条读入和解释用户程序,产生相应的控制信号去控制有关的电路,完成数据的存取、传送和处理工作,并根据运算结果更新各有关寄存器的内容。
(3)输出处理:将输出映像寄存器的内容送给输出模块,去控制外部负载。