【CN209768251U】一种直角坐标红花采摘机器人【专利】
【CN209527208U】一种草莓采摘机器【专利】
权利要求书1页 说明书3页 附图4页
CN 209527208 U
CN 209527208 U
权 利 要 求 书
1/1 页
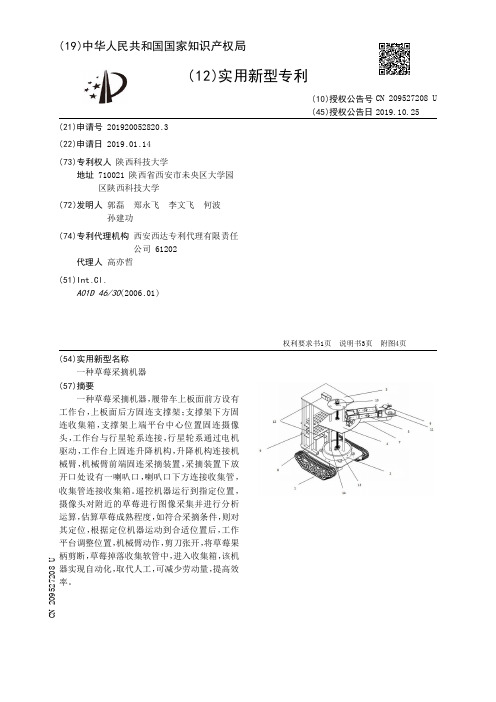
1 .一种草莓采摘机器,包括履带车(1),其特征在于,履带车(1)上板面前方设有工作台 (3),上板面后方固连支撑架(9);支撑架(9)下方固连收集箱(8),支撑架(9)上端平台中心 位置固连摄像头(10),工作台(3)与行星轮系(2)通过轴承连接,行星轮系(2)由电机驱动, 工作台(3)上固连升降机构(4),升降机构(4)上固联机械臂(5),机械臂(5)前端固连采摘装 置(6),采摘装置(6)下放开口处设有一喇叭口(11),喇叭口(11)下方连接收集管(7),收集 管(7)连接收集箱(8)。
发明内容 [0004] 为了克服上述现有技术的不足,本实用新型的目的是提供一种草莓采摘机器,解 决现有技术草莓在采摘过程中,以人工为主,劳动量大,效率低的问题。 [0005] 为了实现上述目的,本实用新型采用的技术方案是: [0006] 一种草莓采摘机器,包括履带车,履带车上板面前方设有工作台,上板面后方固连 支撑架;支撑架下方固连收集箱,支撑架上端平台中心位置固连摄像头,工作台与行星轮系 通过轴承相连,行星轮系通过电机驱动,工作台上固连通过升降机构,升降机构通过连接机 械臂 ,机械臂前端固连采摘装置 ,采摘装置下放开口处设有一喇叭口 ,喇叭口下方连接收集 管,收集管连接收集箱。 [0007] 一种草莓采摘机器,硬件系统模块基于树莓派(Rasphberry Pi)3B开发平台进行 设计,主要包括控制器模块、电源模块、避障模块、电机驱动模块、导航定位模块以及视觉模 块等。 [0008] 所述的固连为焊接、螺栓连接、胶粘方式连接。 [0009] 所述的电机固定在工作台的最上方,通过丝杠带动行星轮系的转动。 [0010] 所述的升降机构由电机与丝杠驱动,丝杠位于工作台中心,丝杠外圆周线上均匀 分布三根固定光杆,丝杠连接升降台中心,三根光杆贯穿升降台。 [0011] 所述的机械臂为可三维方向转动机械臂,由内部电机驱动。 [0012] 所述的采摘装置由凸轮、弹簧、剪刀手组成。 [0013] 所述的摄像头与控制中心树莓派相连,对机器附近的草莓进行图像采集。 [0014] 所述的采摘装置由机械臂上的舵机来控制机械臂向定位的草莓位置运动,接着通 过凸轮转动,带动机械臂上的剪刀手闭合,通过弹簧使其再度张开,完成采摘动作。 [0015] 所述的履带车为可遥控的移动车,具有GPS定位模块,由树莓派进行控制。
【CN209994911U】一种机器人视觉的草莓采摘机【专利】

(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920343235.9(22)申请日 2019.03.19(73)专利权人 长春格瑞科技有限公司地址 130000 吉林省长春市高新区锦河街155号实验楼201、202室(72)发明人 左茗羽 赵阳 (74)专利代理机构 长春众邦菁华知识产权代理有限公司 22214代理人 王丹阳(51)Int.Cl.A01D 46/30(2006.01)(54)实用新型名称一种机器人视觉的草莓采摘机(57)摘要一种机器人视觉的草莓采摘机涉及农业设备技术领域,解决了现有采摘机易损伤草莓且效率较低的问题,包括支架、动力传输机构、机械手、上下移动机构、图像采集组件和总收集箱;机械手包括机械手主板、致动件、刀片滑块和刀片;刀片形状为直角三角形,一个直角边为刃边、另一直角边位于机械手主板上、斜边包覆柔性材料;机械手主板连接支撑架和检测装置,小收集盒放置于支撑架内且位于刀片正下方,小收集盒内设有海绵,检测装置检测小收集盒是否装满草莓,若是则提示装置提示;总收集箱能收纳多个小收集盒。
本实用新型通过直角三角形刀片的设置提高了对草莓和草莓植株的保护,方便刀片在草莓植株中穿梭;通过小收集盒提高草莓的质量和存放时间。
权利要求书1页 说明书4页 附图2页CN 209994911 U 2020.01.31C N 209994911U权 利 要 求 书1/1页CN 209994911 U1.一种机器人视觉的草莓采摘机,包括支架、动力传输机构、机械手、上下移动机构、图像采集组件和总收集箱;所述机械手、上下移动机构、图像采集组件、动力传输机构和总收集箱均设于支架上;所述图像采集组件与具有成熟草莓识别程序的计算机连接;所述机械手通过动力传输机构实现前后左右移动,通过上下移动机构实现上下移动,所述机械手包括机械手主板(1)、致动件(2)、刀片滑块(3)和刀片(4);其特征在于,所述刀片(4)形状为直角三角形,一个直角边为刃边、另一直角边位于机械手主板(1)上、斜边包覆柔性材料;所述草莓采摘机还包括支撑架(5)、小收集盒(6)、检测装置和提示装置,支撑架(5)和检测装置均连接机械手主板(1),小收集盒(6)放置于支撑架(5)内且位于刀片(4)正下方,小收集盒(6)内设有海绵,检测装置检测小收集盒(6)是否装满草莓,若检测结果为是则提示装置进行提示;所述总收集箱能收纳多个小收集盒(6)。
一种新型红花采摘装置[实用新型专利]
![一种新型红花采摘装置[实用新型专利]](https://img.taocdn.com/s3/m/290557a2cf84b9d529ea7a02.png)
专利名称:一种新型红花采摘装置专利类型:实用新型专利
发明人:杨朋举,张应清,张小红
申请号:CN202021367274.1
申请日:20200713
公开号:CN212588982U
公开日:
20210226
专利内容由知识产权出版社提供
摘要:本实用新型属于农业机械领域,尤其是一种新型红花采摘装置,针对现有的存放盒内较多数量红花相互挤压会影响采摘红花的质量,并且不方便对采摘剪刀进行存放的问题,现提出如下方案,其包括存放盒,所述存放盒内放置有四个放置座,所述放置座的顶部开设有放置槽,所述放置座的顶部两侧均固定连接有接触板,所述接触板的顶部与相邻放置座的底部相接触,所述放置座的底部中央位置固定连接有挂环,所述存放盒的两侧均固定连接有两个横板,所述横板的底部固定连接有挂钩。
本实用新型实用性好,避免了较多数量红花相互挤压,保证采摘红花的质量,并且方便对采摘剪刀进行存放,方便对采摘剪刀进行取放。
申请人:宁夏西蜂堂农业科技有限公司
地址:756000 宁夏回族自治区固原市西吉县新营乡新营村
国籍:CN
代理机构:成都熠邦鼎立专利代理有限公司
代理人:胡秋立
更多信息请下载全文后查看。
一种红花采摘定位方法[发明专利]
![一种红花采摘定位方法[发明专利]](https://img.taocdn.com/s3/m/57d5590d998fcc22bdd10ddb.png)
专利名称:一种红花采摘定位方法
专利类型:发明专利
发明人:葛云,陈飞,郑一江,马文霄,戚祝晖,张贺,董建华申请号:CN202010851887.0
申请日:20200821
公开号:CN111820008A
公开日:
20201027
专利内容由知识产权出版社提供
摘要:本发明公开了一种红花采摘定位方法,该方法将红花采收机械进行采摘作业时的定位分为三部分:当红花采收机械进行采摘时,基于红花植株独特的生长特性,通过一种夹持板装置,将红花植株由三维空间分布转变为近似二维平面分布,将空间错落分布的红花果球聚拢为单一平面分布;当红花果球为单一平面分布时,部分红花果球存在重叠,通过一种夹持板装置上的分离机构调整红花果球间距;当红花果球在二维平面上无遮挡且保持一定的距离,结合一种识别技术获得红花果球位置坐标,一种采摘装置快速进行采摘作业,采摘完成后释放红花植株。
本发明可为红花采收机械提供一种红花采摘定位方法,有效提高红花的采摘定位效率,实现快速准确的定位和采摘。
申请人:石河子大学
地址:832003 新疆维吾尔自治区石河子市北四路石河子大学北苑新区机械电气工程学院
国籍:CN
更多信息请下载全文后查看。
【CN209435830U】一种移动采摘机器人【专利】
3 .根据权利要求1所述的一种移动采摘机器人,其特征在于:所述支臂(6)为可拆卸结 构,所述支臂(6)与传动皮带(7)之间的夹角为90度,所述支臂(6)呈圆柱状结构。
2
CN 209435830 U
说 明 书
1/3 页
一种移动采摘机器人
技术领域 [0001] 本实用新型涉及采摘装置技术领域,特别涉及一种移动采摘机器人。
背景技术 [0002] 机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编 排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类 工作的工作,例如生产业、建筑业,或是危险的工作,对于园林中的采摘工作来说,传统的采 摘方式都需要多个采摘工人手动进行采摘,这类采摘的方式不仅大大浪费人力物力,且耗 费的时间较长,在采摘过程中,还需要操作人员爬上梯子进行操作,容易发生危险。
(10)授权公告号 CN 209435830 U (45)授权公告日 2019.09.27
( 54 )实用新型名称 一种移动采摘机器人
( 57 )摘要 本实用新型公开了一种移动采摘机器人,包
括底板 ,所述底板的底端四 角固定连接有履带 轮 ,所述底板的 顶端中 部固 定连接有支撑架。该 种实 用新型设计合理 ,使 用方便 ,通过设置有气 缸、压缩弹簧、压块和采摘剪,方便通过气缸带动 压缩弹簧和压块合并从而使得采摘剪实现采摘, 压缩弹簧便于起到快速复位的作用,采用自动化 方式 省时 省力 ,通过设置有电 动机 、传动皮带 和 导杆 ,方便通过电 动机带动传动皮带从而使得导 杆上下移动 ,便于使得支臂作上下 调节 ,能 够根 据需采摘的位置进行上下位置调节,通过设置有 液压缸和滑块,方便通过液压缸带动滑块在导杆 上进行左右滑动,能够根据需采摘的位置进行左 右位置 调节 ,该实 用新型简单方便 ,适合广泛推 广。
一种花朵采摘机器人的采摘方法[发明专利]
![一种花朵采摘机器人的采摘方法[发明专利]](https://img.taocdn.com/s3/m/93a055d8162ded630b1c59eef8c75fbfc77d94ca.png)
(10)申请公布号(43)申请公布日 (21)申请号 201510389142.6(22)申请日 2015.07.03A01D 46/30(2006.01)(71)申请人中国运载火箭技术研究院地址100076 北京市丰台区南大红门路1号(72)发明人唐超 高朝辉 唐庆博 李勇鹏魏明 张霞 张恒浩 王小锭陈春燕(54)发明名称一种花朵采摘机器人的采摘方法(57)摘要一种花朵采摘机器人的采摘方法,其步骤如下:通过步进控制运动至采摘区域;通过视觉传感器观测采摘区域,并通过颜色滤波算法快速实现在复杂背景下对目标的获取,得到多个目标;通过尺寸学习算法,对多个目标进行筛选;利用立体视觉探测系统,通过左、右目相机获取花朵的图像信息,并进行信息提取、匹配,实现位置姿态检测,生成可采摘目标位置姿态数据库;采用多机械臂并联协同运动控制算法,开展多并联机构间的协调控制,生成可采摘目标位姿数据库中的目标进行分工,并对获得分工后的目标进行路径优化,寻找机械臂运动的最短路径,作为单独机械臂的运动规划要求。
本发明克服量了在农业作业复杂环境下对作物目标无法有效识别及采摘的问题。
(51)Int.Cl.(19)中华人民共和国国家知识产权局(12)发明专利申请权利要求书1页 说明书4页 附图1页CN 105993393 A 2016.10.12C N 105993393A1.一种花朵采摘机器人的采摘方法,其步骤如下:a.通过步进控制运动至采摘区域;b.通过视觉传感器观测采摘区域,并通过颜色滤波算法快速实现在复杂背景下对目标的获取,得到多个目标;c.通过尺寸学习算法,对步骤b获取的多个目标进行筛选;d.利用立体视觉探测系统,通过左、右目相机获取花朵的图像信息,并对两个相机内的信息进行提取、匹配,进行光路逆向结算,实现对c筛选后的目标进行位置姿态检测,生成可采摘目标位置姿态数据库;e.采用多机械臂并联协同运动控制算法,开展多并联机构间的协调控制,对步骤d生成可采摘目标位姿数据库中的目标进行分工,并对获得分工后的目标进行路径优化,寻找机械臂运动的最短路径,作为单独机械臂的运动规划要求;f.按照步骤e得到的运动规划要求,控制机械臂完成对目标的包拢,并通过末端切割器快速切割目标;g.在末端切割器中内置吸气式装置,在进行切割的同时,开启吸气式装置;h.吸气式装置吸力设置与目标重量基本保持一致,吸气装置直接连接到存储箱中,完成对花朵的储存。
一种红花采摘控制系统[发明专利]
![一种红花采摘控制系统[发明专利]](https://img.taocdn.com/s3/m/b4f9d358ae1ffc4ffe4733687e21af45b307fea4.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201710387004.3(22)申请日 2017.05.26(71)申请人 石河子大学地址 832000 新疆维吾尔自治区石河子市北四路石河子大学(72)发明人 曹卫彬 崔财豪 杨萌 马锐 孙胃玲 古乐乐 陈棒棒 (51)Int.Cl.G05B 19/05(2006.01)(54)发明名称一种红花采摘控制系统(57)摘要本发明为一种红花采摘控制系统,由控制器,超声波传感器,编码器,步进电机驱动器,步进电机,按钮,指示灯,报警器和电源组成。
红花采摘机工作时,先进行程序检测,程序有误时输出报警,程序无误时等待传感器的信号,有信号时等待编码器信号输出,控制器通过步进电机驱动器控制步进电机动作,完成花丝的夹持、采摘、传送和收集,并回到初始状态,再次等待编码器信号输出,循环执行。
系统有按钮,指示灯,报警器以及供电电源。
按钮允许人工手动运行程序或进行紧急停止操作;指示灯显示采摘机的工作状态;报警器在程序有误时进行报警输出;供电电源给系统进行供电。
本发明实现了现有红花采摘由人工采摘向机械盲采的转变。
权利要求书1页 说明书2页 附图2页CN 106970587 A 2017.07.21C N 106970587A1.一种红花采摘控制系统,由控制器,超声波传感器,编码器,步进电机驱动器,步进电机,按钮,指示灯,报警器和电源组成。
2.红花采摘机工作时,先进行程序检测,程序有误时输出报警,程序无误时等待传感器的信号,有信号时等待编码器信号输出,控制器通过步进电机驱动器控制步进电机动作,完成花丝的夹持、采摘、传送和收集,并回到初始状态,再次等待编码器信号输出,循环执行。
3.系统有按钮,指示灯,报警器以及供电电源。
4.按钮允许人工手动运行程序或进行紧急停止操作;指示灯显示采摘机的工作状态;报警器在程序有误时进行报警输出;供电电源给系统进行供电。
一种中药材红花种子采收机[实用新型专利]
![一种中药材红花种子采收机[实用新型专利]](https://img.taocdn.com/s3/m/54b76ee72dc58bd63186bceb19e8b8f67d1cef50.png)
专利名称:一种中药材红花种子采收机
专利类型:实用新型专利
发明人:毋玲玲,臧广鹏,魏玉杰,张兆萍,王玉红申请号:CN202123015129.4
申请日:20211203
公开号:CN216492062U
公开日:
20220513
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种中药材红花种子采收机,包括支架、转盘和本体,本体的顶端安装有排料管,且排料管的一侧设置有调节结构,本体的一侧固定有驾驶室,驾驶室的顶端设置有报警灯,驾驶室一侧的顶端设置有照明结构,本体一侧的顶端安装有支架,支架顶部的两端均设置有导向结构,支架的顶端安装有转盘,转盘的内部设置有连轴,转盘内部连轴的外部设置有碾压轴。
本实用新型通过设置有调节结构,由于伸缩管通过电动伸缩杆延伸,排料口下移至靠近存放袋上方,因此尽量避免物料在撒落时向外部飘散,同时通过风机的作用下可对种子中的轻壳体吹处,提高种子的干净度。
申请人:甘肃省农业工程技术研究院
地址:733006 甘肃省武威市凉州区黄羊镇新镇路234号
国籍:CN
更多信息请下载全文后查看。
红花采收装置的设计及研究
红花采收装置的设计及研究红花采收装置的设计及研究概述:红花,又称藏红花,是一种常见的草本植物。
它的花瓣鲜艳红亮,被广泛用于烹饪和制作药品。
由于红花的市场需求量大,传统的人工采摘方式效率低且劳动强度大,因此需要一种高效、自动化的采收装置。
本文将介绍红花的特点、红花采收装置的设计原则以及所采用的技术方案和系统组成。
红花特点:红花植株高度一般在20-30厘米左右,细长的叶片呈青绿色。
每朵花由若干红色的花瓣组成,具有鲜艳的颜色和芳香的气味。
红花的花期较短,一般为每年的9月至10月,因此在采摘时要抓紧时间。
设计原则:红花采收装置应具备以下几个设计原则:1. 高效:装置应能够快速准确地识别红花并进行自动采摘,以提高采摘效率。
2. 轻便:装置应具备轻便的特点,方便操作员携带和使用。
3. 保护花瓣:采摘时要注意避免对红花花瓣的损伤,以保证其完整性和品质。
4. 自动化:采摘装置应具备自动作业功能,减轻人力劳动强度。
5. 安全性:装置应考虑使用者的安全,并具备相应的安全保护措施。
技术方案:基于以上设计原则,我们提出一种用于红花采摘的自动化装置的技术方案。
该装置由以下几个部分组成:1. 图像识别系统:采用计算机视觉技术,利用摄像头对红花进行拍摄和识别,确定采摘位置和花朵数量。
2. 机械臂:利用机械臂进行精确的采摘操作,保证对红花的有效采集,并避免损害。
3. 控制系统:对图像识别系统和机械臂进行协调控制,实现红花的自动采摘。
4. 轻便携带装置:为方便操作员携带和使用,设计轻便的携带装置,如背包式或手持式。
系统组成:红花采收装置的系统组成如下:1. 摄像头:用于采集红花图像。
2. 单片机/微处理器:用于图像处理和控制系统。
3. 驱动器和电机:用于机械臂的控制和动力驱动。
4. 传感器:用于检测红花的位置、距离和姿态。
5. 电源:提供工作时所需的电力。
6. 携带装置:根据实际需求选择合适的携带方式。
本装置的工作原理是:摄像头通过采集红花的图像,传送给控制系统进行处理。
红花采摘机器人控制系统及控制方法[发明专利]
![红花采摘机器人控制系统及控制方法[发明专利]](https://img.taocdn.com/s3/m/d088313c640e52ea551810a6f524ccbff121caba.png)
专利名称:红花采摘机器人控制系统及控制方法专利类型:发明专利
发明人:郭辉,高国民,罗丹,董芙楠,路昊,武天伦申请号:CN202111087539.1
申请日:20210916
公开号:CN114271097A
公开日:
20220405
专利内容由知识产权出版社提供
摘要:本发明自动化采摘设备技术领域,具体涉及一种红花采摘机器人控制系统及控制方法。
该控制系统中运动平台的底部通过伸缩装置连接有行走设备。
采摘装置的固定端连接在运动平台的底部。
运动平台上设置有主控模块、导航模块、视觉定位模块和运动控制模块。
主控模块中主控制器通过接入天线与调度系统相连。
主控制器接收调度系统的指令,并根据导航模块传输的运动平台位置信息和视觉定位模块获取的红花空间位置信息计算出采摘路径,向运动控制模块发出运动指令。
该控制系统实现了在田间自主采摘红花,并且适应在复杂的田间环境下实施红花的采摘、收集作业,优化了定位速率和定位精度,大大提高了红花的采摘效率,满足了大规模红花自动化采摘的需求。
申请人:新疆农业大学
地址:830052 新疆维吾尔自治区乌鲁木齐市沙依巴克区农大东路311号
国籍:CN
代理机构:南京行高知识产权代理有限公司
代理人:李晓
更多信息请下载全文后查看。
一种采摘机器人[发明专利]
![一种采摘机器人[发明专利]](https://img.taocdn.com/s3/m/52eb97f9f18583d0486459c1.png)
专利名称:一种采摘机器人
专利类型:发明专利
发明人:袁标,李维钧,陈柯,王金悦申请号:CN201911352800.9申请日:20191225
公开号:CN111201895A
公开日:
20200529
专利内容由知识产权出版社提供
摘要:本发明公开了一种采摘机器人,涉及采摘技术领域,包括机器人自动驾驶平台和云端控制系统,所述机器人自动驾驶平台和云端控制系统之间通过无线信号连接,所述机器人自动驾驶平台的顶部中心设置有存储框,所述存储框的内侧设置有腔体;所述器人自动驾驶平台的底部两侧均设置有全向行走机构,所述全向行走机构包括行走架、全向轮以及行走控制结构,所述行走架四角对应转动连接有所述全向轮,所述全向轮对应连接有行走控制结构。
本发明在操作过程中,能够通过云端控制系统、自动驾驶平台、六轴机械手、3D摄像头之间灵活配合使用,对采摘信息进行处理传递给控制器,达到自动采摘目标的效果,无需人工,采摘效率更高,使用时更加方便。
申请人:上海点甜农业专业合作社
地址:200000 上海市金山区亭林镇周栅村4组4102号
国籍:CN
代理机构:上海宣宜专利代理事务所(普通合伙)
代理人:陈酩
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920297250.4
(22)申请日 2019.03.10
(73)专利权人 石河子大学
地址 832003 新疆维吾尔自治区石河子市
北四路石河子大学机械电气工程学院
(72)发明人 张晓伟 葛云 张伟 郑一江
张洚宇 马文霄 柴潇
(51)Int.Cl.
A01D 46/30(2006.01)
(ESM)同样的发明创造已同日申请发明专利
(54)实用新型名称
一种直角坐标红花采摘机器人
(57)摘要
本实用新型涉及一种直角坐标红花采摘机
器人,包括机架、行走装置、图像采集装置、直角
坐标采摘装置、红花收集装置,其特征在于行走
装置安装于机架前端与后端,图像采集装置安装
于机架正下方,直角坐标采摘装置安装于机架空
槽内,红花收集装置安装于机架后方,本实用新
型的目的在于可代替人工采摘红花,实现机械化
作业,具有提高生产效率、减少劳动强度、节约生
产成本和人力资源等优点。
权利要求书1页 说明书3页 附图3页CN 209768251 U 2019.12.13
C N 209768251
U
权 利 要 求 书1/1页CN 209768251 U
1.一种直角坐标红花采摘机器人,包括机架(1)、行走装置、图像采集装置、直角坐标采摘装置、红花收集装置,其特征在于行走装置安装于机架(1)前端与后端,图像采集装置安装于机架(1)正下方,直角坐标采摘装置安装于机架(1)空槽内,红花收集装置安装于机架(1)后方。
2.根据权利要求1所述的一种直角坐标红花采摘机器人,其特征在于所述的行走装置包括轮架(2)、车轮(3),车轮(3)与轮架(2)之间通过转轴配合连接,轮架安装于机架(1)前方和后方对称安装各两个,组成骑跨式的行走装置。
3.根据权利要求1所述的一种直角坐标红花采摘机器人,其特征在于所述的图像采集装置主要包括双目摄像机(11),安装于机架(1)正下方并安装于直角坐标采摘装置前方以实现从正上方照射红花植株,并未与直角坐标采摘装置干涉。
4.根据权利要求1所述的一种直角坐标红花采摘机器人,其特征在于所述的直角坐标采摘装置包括纵向滚珠丝杆滑台Ⅰ(8)、横向滚珠丝杆滑台Ⅱ(9)、末端执行器(10),横向滚珠丝杆滑台Ⅱ安装在机架(1)空槽内,纵向滚珠丝杆滑台Ⅰ(8)通过滑块(28)与横向滚珠丝杆滑台Ⅱ(9)十字交叉连,末端执行器(10)连接在纵向滚珠丝杆滑台Ⅰ(8)末端。
5.根据权利要求4所述的一种直角坐标红花采摘机器人,其特征在于所述的滚珠丝杆滑台采用标准滚珠丝杆滑台包括伺服电机(25)、联轴器(26)、丝杆(27)滑块(28)、导轨Ⅰ(29)和导轨Ⅱ(30)。
6.根据权利要求4所述的一种直角坐标红花采摘机器人,其特征在于所述的末端执行器包括支架(12)、气缸(13)、固定管(14)、集花管(15)、端盖(16)滑槽(17)、手指(18)和锥形壁(19),固定管(14)固接在支架(12)上,集花管(15)套接在固定管(14)上,气缸(13)通过螺栓固定在支架(12)上,气缸(13)另一端连接在端盖(16)上方,端盖(16)和锥形壁(19)通过螺栓固定连接成一个整体,锥形壁(19)和固定管(14)之间组成移动副,固定管下部开设3个孔且相邻孔之间成120°,对应锥形壁3个滑槽相邻角度也为120°,3个手指一端的滚轮(22)卡在滑槽(17)内另一端通过固定管(14)上的孔伸进固定管(14)内,手指突出(24)与固定管(14)之间安装有弹簧对其进行压缩后的复位,3个手指两相邻手指之间成120°安装。
7.根据权利要求1所述的一种直角坐标红花采摘机器人,其特征在于所述的红花收集装置包括红花收集口(4)、集花室(5)、风机(6)和风机电机(7),红花收集口(4)通过橡胶管和末端执行器的集花管(15)连接,集花室(5)内装有筛网(31),防止红花花丝进入风机(6)。
2。