Steering wheel angle filtering based on wavelet transform
汽车专业英语 课后词组 汉译英

与…不同,不同于(be)different than(齿轮等)与…啮合,接合Engage with(点火线圈的)初级电路和次级电路Primary and secondary circuits(美)汽车工程师学会SAE=Society of Automotive Engineers(膜片弹簧)支撑环Fulcrum ring(汽车)倒档Reverse gear(胎面)平点Flat spot(悬架)纵(拖)臂,纵向拉杆Trailing links(液力)变矩器Torque converter(制动系)放气螺钉Bleeder screw(主减速器)主动小齿轮 Drive pinion(自动变速器)自适应式变速器控制Adaptive transmission control(ATC)U形螺栓,骑马螺栓U-bolt安全阀,卸压阀Pressure-relief valve摆臂Swinging arm摆动半轴Swinging half-axle板簧吊环Spring shackle半轴,驱动轴Axle shafts半轴齿轮Side gear(differential gear)磅/平方英寸Psi=pound per square inch背压Backpressure比例阀,定量阀,配合阀 Proportioning valve必然Tend to补气阀Gulp valve不起作用,停止使用Out of the action 步进电机Stepper motor叉形控制臂前悬A-arm front suspension差速器the differential差压(调节)阀Pressure differential valve柴油机燃料,柴油Diesel-fuel车轮定位Wheel alignment车身The body of a car承载式车身,无大梁车身 Unitized body(or unibody)齿节,齿距Tooth pitch齿轮减速Gear reduction齿轮减速比Gear reduction ratio齿轮式机油泵,齿轮泵Gear type oil pump齿条齿轮式Rack-and-pinion出油阀Delivery valve触点型点火系统Breaker point typeignition system传动比Drive ratio传动比,齿轮齿数比Gear ratio传动系Drive train传动系Power train传动轴Drive shaft传动轴Drive(or propeller)shaft磁场Magnetic field催化转换器Catalytic converter达到Get up to代表Stand for单向离合器,超越离合器 One-way clutch氮氧化物Nitrogen oxide导轴衬,控制轴衬Pilot bushing点火系统Ignition system点火系统the ignition system电动燃油泵Electric pump电控自动变速器Electronically controlled automatic transmission电子控制系统Electronic control system顶档杆(一种具有用手操纵的换挡杠杆的自动换挡装置)Stick shift动力转向系统Power-steering system二氧化硫Sulfur dioxide发动机汽缸体Engine block阀口Valve port防滑差速器Limited-ship differential (LSD)废气再循环Exhaust gas re-circulation (EGR)分火头Distributor rotor分离拨叉Release fork分离轴承Release bearing风窗玻璃刮水器(雨雪刷)Windshield wiper 负前束,后束Toe out干油底壳Dry-sump钢板弹簧,片弹簧Leaf spring钢板弹簧卷耳Spring eye高速档High gear高压导线High tension lead高压锅Pressure cooker根据According to更不用说Not to mention鼓式制动器Drum brake鼓式制动器Drum brakes固定在…,连到…上,附属于Be attached to 归结起来是Boil down to过多转向Over-steer过紧Over-tighten行星齿轮Differential pinion 行星齿轮轴Pinion shaft行星齿轮组Planetary gear set横拉杆Tie rod横置钢板弹簧Transverse leaf spring花键毂Splined hub滑阀,柱式滑阀Spool-valve化油器浮子室Carburetor bowl环形齿轮,齿圈,冕状齿轮Ring gear换向阀,分流阀Diverter valve回油管路Return line回转阀,转阀Rotary valve回转力,侧向反力Cornering force回转式叶片轮,叶片轮Rotary-vane pump火花点火Spark ignition火花塞Spark plug火花塞Spark plug霍尔效应传感器Hall effect sensor机油泵Oil pump机油滤清器Oil filters机油吸油管Pick-up tube积累,增加Build up几乎没有,简直没有Little or no加仑英里,燃油经济性Gas mileage加速踏板Gas pedal减振器Shock absorbers减振器,阻尼器Shock absorber溅着水通过,涉水通过Splash through接合装置Coupling device节流阀Throttle valve节气门拉线(索)Throttle cable节气门体总成Throttle body assembly结果As a result金属V带Metal V-belt紧急停车,紧急制动Panic stop紧急制动器,紧急闸,应急制动Emergencybrake进气冲程Intake stroke进气阀Intake valve晶体管压力传感器Solid statepressure transducer开口销Cotter pin可变速比转向,可变传动比转向装置Variable-ratio steering可伸缩叶片Retractable vane客货两用轿车,旅行车Station wagons空燃比Air/fuel ratio空调冷凝器Air conditioning condenser空转,空闲At idle控制臂Control arms控制套筒Control sleeve冷却系统the cooling system离合器clutch离合器从动盘,离合器摩擦片Clutch disc离合器踏板Clutch pedal离心力Centrifugal force利用,忍受(满足)Do with连杆Connecting rod连同…一起Along with量出Measure off另一方面On the other hand轮缸,分泵Slave cylinder轮胎胎面Tire-tread螺杆Threaded rod螺栓头Bolt head螺旋弹簧Coil spring螺旋锥齿轮Spiral bevel gear滤网Filter screen麦弗逊滑柱悬架Macpherson strutsuspension脉冲宽度Pulse width膜片弹簧Diaphragm spring摩擦衬片Friction lining目的是,用来Be designed to内燃机Internal-combustion engine能量转换Energy conversion扭杆弹簧前悬Torsion bar strutsuspension扭力杆,扭杆弹簧Torsion bar排放控制系统Emission-control system排气冲程Exhaust stroke排气阀Exhaust valve排气系统Exhaust system排气系统exhaust system盘式制动器Disc brake旁通阀Bypass valve泡沫抑制剂Foam inhibitor配气机构Valve train膨胀箱,溢流箱Expansion(overflow)tank平行杠杆式连结Parallel link平行连杆系统Parallelogram system平衡阀Equalizer valve平面凸轮Cam disk起(启)动Start-up气门导管Valve guide气门杆Valve stem气门室盖(罩)Valve cover汽车变速器automotive transmission汽车润滑系统automotive lubricationsystem前轮前束Toe in清洁分散剂Detergent-dispersant球形接头,球节,球窝关节Ball joint球轴承,滚球轴承Ball bearing驱动轮Drive wheel驱动轴,传动轴Drive shaft曲轴箱强制通风PCV=positivecrankcase ventilation取消Cancel out全流式滤清器Full-flow filtering system燃气涡轮发动机Gas-turbine engine燃烧室Combustion chamber燃烧室Combustion chamber燃油喷射系统fuel injection system燃油压力调节器Fuel pressure regulator热能Thermal energy如下As follows润滑系Lubrication system润滑系统Lubricating system上控制臂Upper control arm上止点TDC=Top Dead Center伸出,显眼,触目Stick out湿油底壳Wet-sump使换快档,促进,增加Gear up手动选档的机械变速器Select shiftmanual(SSM)输油泵Fuel feed pump水套Water jacket斯特灵发动机Stirling engine随动臂Idler arm踏板发软Spongy pedal炭罐Charcoal canister听听(有否…),等着听 Listen for凸轮随动杆,气门挺柱(摇臂)Cam follower万向节Universal joints万向节,万向接头U-joint稳定杆,防止车厢侧倾稳定杆Stabilizer bar涡轮,涡轮传动机构Worm gear无分电器点火器Distributorless ignitionsystem无级变速器Continuously variabletransmission无铅汽油Unleaded fuel下止点BDC=Bottom Dead Center详细地In detail橡胶衬套Rubber bushing小齿轮Pinion gear小齿轮角Pinion angle楔块式超越(单向)离合器Sprag clutch泄漏Leak out悬架系统Suspension system循环球式Recirculating ball压盘Pressure plate压缩冲程Compression stroke压缩点火Compression ignition压缩率,压缩比Compression ratio压缩天然气CNG=Compressed natural gas摇臂Rocker arm叶片式泵Vane pump液化石油气体LPG=Liquefied Petroleum Gas液力变矩器,转矩变换器 Torque converter液力耦合器Fluid coupling液压传动(操纵)机构,液压动力缸Hydraulic actuator一…就The moment一氧化碳Carbon monoxide溢流口Spill port油底壳Oil pan油轨Fuel rail有效(供油)行程Effective stroke又名… a.k.a.=also known as与…连接,与…结合Couple with与…相反Out of phase with与…相撞Collide with与啮合Mesh with摘去,拾取Pick … off粘度指数Viscosity index张紧轮,导向轮Jockey pulley长圆孔,长孔,缝槽,切口Slotted hole照做Comply with真空软管Vacuum hose蒸汽机Steam engine正时齿轮Timing gear只不过是,简直是Nothing more than直列式(喷油)泵Inline pump止回阀Check valve止推(推力)垫Thrust pad制动块Brake Pads制动软管Brake hose制动踏板Brake pedal制动蹄(块),闸皮Brake shoe制动蹄(片)Brake shoe制动系Barking system制动系统brake system制动主缸Master cylinder制动助力器Brake booster掷出,甩掉,扔掉Fling off终止,完成,结束Top off钟形外壳,离合器壳,变矩器外壳Bellhousing逐渐减少Taper off主缸Master cylinder主减速器,最终传动Final drive主减速器总成,最终传动装置Final driveassembly柱塞套Plunger barrel铸铁Cast iron铸铁,锻铁Cast iron转向半径Turning radius转向垂臂,转向摇臂,转向臂Pitman arm转向管柱Steering column转向横拉杆Tie rod转向减速比,转向变速比 Steering ratio转向角Steering angle转向节Stub axle转向节主销,旋转销Swivel pin转向盘Steering wheel转向器Steering box转向器Steering gears转向梯形机构,转向几何机构Steeringgeometry转向系Steering system转向限值Turning limit锥齿轮,伞齿轮Bevel gear自动选档的机械变速器Auto shift manual(ASM)纵向的,前后的Force-and-aft阻蚀剂,腐蚀抑制剂Corrosion inhibitor组合车身Unit body组合阀Combination valve做功冲程Power stroke。
自适应神经模糊推理的四轮转向车辆转向控制研究

224机械设计与制造Machinery Design&Manufacture第3期2021年3月自适应神经模糊推理的四轮转向车辆转向控制研究曹艳玲,张琦(河南科技大学车辆与交通工程学院,河南洛阳471003)摘要:模糊规则的建立和隶属度函数的确定是设计模糊系统的难题。
基于神经网络和模糊逻辑的自适应神经模糊推理系统,能够从仿真数据中自动提取出If-Then规则。
并在Matlab/Simulink软件中,建立包含侧向运动、横摆运动、侧倾运动三个自由度的四轮转向车辆三自由度动力学模型。
将得到的If-Then规则读取到模糊控制器中和三自由度车辆模型进行联合仿真。
其中模糊控制器以方向盘转角、方向盘转角速度和车速作为输入,后轮转角作为输出。
最后与前轮转向的车辆进行转向盘角阶跃仿真对比。
仿真分析结果表明:基于自适应神经模糊推理系统建立的后轮转角模糊控制器能够实现理想的质心侧偏角和车辆横摆角速度响应,提高了车辆的操纵稳定性。
关键词:自适应;神经模糊推理;三自由度;四轮转向;操纵稳定性中图分类号:T H16;U461.6文献标识码:A文章编号:1001-3997(2021 )03-0224-05Research on Steering Control of Four-Wheel Steering VehicleBased on Adaptive Neuro-Fuzzy SystemCAO Yan-ling, ZHANG Qi(College of Vehicle and Traffic Engineering, He'nan University of Science and Technolog, He'nan Luoyang 471003, China) Abstract :77ie establishment o f fu zzy rules and the determination o f membership function are the difficult problems in designing f u zzy system. The adaptive neural fu zzy inference system based on neural network and fu zzy logic can automatically extract If-Then rules from simulation data. In the Matlab/Simulink software, a three-degree-of-freedom, dynamic model o ffour-w heel —steering vehicle is established, which includes three degrees o f f reedom:lateral motion, yaw motion and roll motion. The obtained If-Then rules are read into fuzzy controller and 3 D O F vehicle model for joint simulation. The fuzzy controller uses H and-W heel A ngle, H and-W heel Angle speed and speed as input, and rear wheel angle as output. Finally,the steering wheel angle step simulation is compared with the front wheel steering vehicle. The simulation results show that thefu zzy controller based on the adaptive neural fuzzy inference system can achieve the ideal sideslip angle and the yaw rate response o f the vehicle and improve the vehicle handling stability.Key Words:Self-Adaption;Neural Fuzzy Reasoning;Three Degrees of Freedom;Four-Wheel Steering;Handling Stabilityl引言随着汽车产业的蓬勃发展,车辆操纵问题也日益显现出来。
汽车专业英语 单词表
unit1body 车身chassis 底盘enclosure外壳、套hood车棚、车顶sway 摇摆frame车架steering转向、操作brake 制动weld焊接rivet铆钉bolt螺钉washer垫圈vibration 振动stabilizer稳定器ride乘坐舒适性handling操作稳定性linkages转向传动机构plier钳子distributor分电器alternator交流发电机regulator调节器carburetor化油器radiator散热器、水箱defroster除冰装置sludge金属碎屑transmission变速器differential 差速器power train 传动系unitized body 承载式车身suspension system 悬架系统steering system 转向系braking system 制动系shock absorbers减震器control arms控制臂steering wheel 转向盘steering column转向管柱steering gears 转向器tie rod 横拉杆idler arm随动臂brake shoe制动蹄disc brake 盘式制动器drum brakes 鼓式制动器ignition system 点火系统exhaust system 排气系统lubrication system 润滑系oil filters 机油滤清器drive(or propeller)shaft传动轴universal joints 万向节dynamo发电机horn喇叭swived 旋转steering box转向器timing gear 正时齿轮bevel gear 锥齿轮mesh with与啮合leaf spring 钢板弹簧stub axle 转向节unit2longitudinal纵向的transverse横向的reciprocate往复spin旋转piston活塞ignite点火rub摩擦quart夸脱reservoir油箱mechanical机械的enclosed被附上的gallon加仑stroke冲程camshaft凸轮轴combustion燃烧disengaged脱离啮合的flywheel飞轮internal-combustion engine内燃机diesel-fuel柴油LPG=Liquefied Petroleum Gas液化石油气体CNG=Compressed natural gas压缩天然气spark ignition火花点火compression ignition压缩点火spark plug火花塞gas-turbine engine蒸汽机Stirling engine斯特灵发动机lubricating system润滑系统oil pan油底壳oil pump机油泵exhaust system排气系统emission-control system排放控制系统energy conversion能量转换air/fuel ratio空燃比connecting rod连杆TDC=Top Dead Center上止点BDC=Bottom Dead Center 下止点intake stroke进气冲程compression stroke压缩冲程power stroke作功冲程exhaust stroke排气冲程compression ratio压缩比lifter挺柱rocker摇臂retainer弹簧座seal密封件tappet 推杆lobe凸起gasket垫圈valve train配气机构cam follower气门挺柱rocker arm摇臂combustion chamber燃烧室intake valve进气阀exhaust valve排气阀valve stem气门杆valve cover气门室盖valve port阀口valve guide气门导管unit3residual剩余的varnish积碳buildup组合adhesion粘着cleanser清洁剂sludge油泥grime污垢clog填塞gum粘合trough水槽baffle隔板sump油底壳crankcase曲轴箱porosity多孔性periphery外围synthetic合成的additive添加剂antiscuff防磨损overhual大修neutrlize使无效agitation激动start-up启动engine block气缸体dry-sump 干油底壳wet-sump湿油底壳pickup tube机油吸油管filter screen滤网full-flow filtering system全流式滤清器pressure-relief valve安全阀bypass valve旁通阀gear type oil pump 齿轮泵jockey pulley张紧轮corrosion inhibitor阻蚀剂detergent-dispersant清洁分散剂viscosity index粘度指数foam inhibitor泡沫抑制剂drain 排出ramp斜坡underneath在...的下面wrench扳手unleashed fuel无铅汽油over-tighten过紧comply with 照做unit4water jacket水套thermostat节温器radiator散热器subtract减deposits沉积物lawnmower割草机braze焊接tranmission变速器transversely横着longitudinal纵向的expansion(overflow)tank 膨胀箱on the other hand另一方面not to mention更不用说out of the action不起作用water jacket水套combustion chamber燃烧室pressure cooker高压锅be designed to目的psi=pound per square inch磅英寸glycol 乙二醇flush冲洗silicate硅酸盐deterioration变质fray磨损peeling剥皮age老化deterioration损坏clamp管夹filler注入口deflect变形span跨度pick...off摘去air conditioning condenser空调冷凝器top off 终止unit5feedback反馈injector喷油器sensor传感器given给定的bleed放油spigot连接管接合alleviate易于忍受momentarily瞬时地electric pump电动燃油泵pulse width脉冲宽度fuel rail油轨return line回油管路fuel pressure regulator燃油压力调节器throttle body assembly节气门体总成solid state pressure transducer晶体管压力传感器measure off量出hall effect sensor霍尔效应传感器taper off逐渐减少injector喷油器pre-chamber预燃室meter计量leftmost最左边的translation移动solenoid电磁线圈manually手动地governor调速器aneroid空盒气压表stand for代表... inline pump直列式喷油泵fuel feed pump输油泵vane pump叶片式泵cam disk平面凸轮drive shaft传动轴be attached to固定在... spill port溢流口effective stroke有效行程plunger barrel柱塞套build up积累control sleeve控制套筒delivery valve出油阀in detail详细地unit6tremendous巨大的perforated多孔的muffler消声器tailpipe尾管hanger吊钩manifold歧管fiberglass玻璃纤维speaker扬声器header集气管baffled阻挡的convoluted盘旋的flat 平面socket插座sizable相当大的room空间bump碰撞stick out伸出the body of a car车身cast iron铸铁catalytic converter催化转换器out of phase with与...反相collide with与...相撞cancel out取消backpressure背压hydrocarbon碳氢化合物phosphorus磷contaminate 污染sludge油泥byproduct副产品cross-section横截面platinum铂palladium钯rhodium 铑sulfur dioxide二氧化硫carbon monoxide一氧化碳nitrogen oxides氮氧化合物Exhaust Gas Re-circulation(EGR)废气再循环tend to必然carburetor bowl化油器浮子室charcoal canister碳罐check valve止回阀gulp valve补气阀diverter valve换向阀as aresult结果stepper motor步进电机PCV=positive crankcase ventilation 曲轴强制通风unit7distributor分电器condenser电容器wear磨损saturation磁饱和series串联wind缠绕coil 线圈transformer变压器turn匝数term学期breaker point type ignition system触点型点火系统distributorless ignition system无分电器点火系统primary and secondary circuit初级电路和次级电路magnetic field磁场high tension lead高压导线distributor rotor分火头spark plug 火花塞nothing more than只不过是bedifferent than与...不同prevailing主要的discrete独立的interpolate内插telemetry遥测技术relay继电器acoustic听觉的figure数字little or no 几乎没有as follows如下according to根据boil down to归结起来是listens for等着听the moment一...就unit8clutch离合器flywheel飞轮stationary静止的torsionary扭转的crankshaft曲轴stall停转mount安放groove沟lever杆pivot支点gearbox变速器retract缩回compactness紧密drive train传动系drive shaft传动轴pressure plate压盘clutch disc离合器从动盘gear ratio 传动比release bearing分离轴承release fork分离拨叉master cylinder主缸clutch pedal离合器踏板coupling device接合装置at idle空转couple with与...连接ring gear齿圈pinion gear 小齿轮splined hub花键毂cast iron铸铁diaphragm spring膜片弹簧thrust pad止推垫engage with与...啮合centrifugal force离心力fulcrum ring导轴衬bell housing离合器壳pump泵轮turbine涡轮stator导轮redirect使改道tricky复杂的hinder阻碍stall停转counter消除torque converter液力变矩器gas pedal加速踏板one-way clutch单向离合器gas mileage燃油经济性get up to达到unit9hump圆形隆起transaxle变速驱动桥tuck挤进gasket垫圈governor调速器modulator调制器spline花键bone结合strap皮带doughnut油炸圈饼stator定子maze曲径submerge淹没quart夸脱downshift向下换挡optimal最佳的solenoid电磁线圈retrieve找回cork软木塞manipulate操作fluid coupling液力耦合器torque converter液力变矩器planetary gear set 行星齿轮组throttle cable节气门拉索ring gear齿圈high gear高速档reverse gear倒档sprag clutch楔块式超越离合器centrifugal force离心力gear up使换快档stick shift顶档杆vacuum hose真空软管throttle valve节流阀leak out泄露windshield wiper风窗玻璃刮水器unit10differential差速器hypoid准双曲面的intersect相交mesh啮合traction静止的limited-slip differential(LSD)防滑差速器drive shaft传动轴axle shaft半轴final drive assembly主减速器总成gear reduction齿轮减速gear reduction ratios齿轮减速比side gear半轴齿轮pinion shaft行星齿轮轴drive pinion主动小齿轮pavement人行道compensate抵消final drive主减速器drive wheel驱动轮limited-slip differential防滑差速器unit11disastrous灾难性的hood发动机罩plunger柱塞sponginess海绵性的malfunction故障bypass迂回corkscrew开塞钻inoperative不起作用的booster调压器slam冲击screech发出尖锐的声音thumping极大的momentarily即刻thermal energy热能master cylinder制动主缸brake pedal制动踏板brake hose制动软管slave cylinder轮缸drum brake鼓式制动器brake shoe制动蹄bleeder screw放气螺钉spongy pedal踏板发软panic stop紧急制动friction lining比例阀equalizer valve平衡阀pressure differential valve差压阀combination valve组合阀emergency brake紧急制动器brake booster制动助力器flat spot平点hydraulic actuator液压传动机构puddle水坑glazing上光riveted用铆钉钉牢的outlaw宣布...为不合法fling off甩掉splash through涉水通过slotted hole长圆孔Brake Pads制动块do with利用unit12perpendicular垂直的intersect相交enclose装入mechanism机械装置rack齿条spindle轴revolution旋转slightly轻微的fluid液体linkage连接threaded带着螺纹的engage接合spin回旋recirculate在循环slope斜坡oval卵形的outlet出口exert尽力utilize利用consumption消费eliminate除去spindle轴steering system转向系统rack-and-pinion齿条齿轮式recirculating ball循环球式steering ratio转向减速比variable-ratio steering可变速比转向tooth pitch齿距turning limit转向限值power-steering system动力转向系统worm gear涡轮pitman arm转向臂threaded rod螺杆ball bearing球轴承rotary-vane pump叶片泵retractable vane可伸缩叶片pressure-relief valve安全阀rotary valve回转阀spool-valve滑阀electronic control system电子控制系统specification规范camber外倾角caster主销外倾wheelbase轴距fastener扣件wheel alignment车轮定位steering geometry转向梯形机构steering angle转向角toe in前轮前束toe out后束turning radius转向半径tire-tread轮胎胎面cotter pi开口销unit13alignment调正bump碰撞deflect使什么偏斜clamp夹子pivot支点rebound回弹strut支柱lengthwise纵向的vibration振动asymmetrical不均匀的semielliptical半椭圆的bracket 托架staggered错列的unit body组合车身coil spring螺旋弹簧leaf spring钢板弹簧torsion bar扭力杆station wagons旅行车spring eye钢板弹簧卷耳rubber bushing橡胶衬套bolt head螺栓头spring shackle板簧吊环upper control arm上控制臂ball joint球形接头stabilizer bar稳定杆cornering force回转力shock absorer减震器trailing links纵臂pinion angle小齿轮角U-joint万向节U-bolt u形螺栓fore-and-aft纵向的wishbone叉形控制臂scrub摩擦parallel link平行杠杆式连结parallellogram system平行连杆系统swinging arm摆臂swinging half-axle摆动半轴over-steer 过多转向unit14dissipate消耗schematic简图integrity完整性amplitude振幅threshold极限值modulator调节器ensemble整体ABS(Antilock Braking System)防抱死制动系统TCS(Traction Control System)牵引力控制系统retarding force制动力in exchange for变换magnetic flux磁通量tracking stability直线行驶稳定性dump valve减压阀PCM(power control module)动力系统控制模块subassembly 部件sinusoidal正弦曲线accumulator蓄电池investigation调查wiring harness线束malfunction indicator lamp(MIL)故障指示灯instrument cluster仪表板DTC(diagnostic test code)诊断故障码unit15override基本的steep陡峭的congested拥挤的vacuum真空度transducer转换器solenoid 电磁线圈manifold进气歧管speedometer速度计cruise control system巡航控制系统powertrain control module动力传动控制模块vehicle speed sensor车速传感器solenoid valve电磁阀generator speed sensor永磁脉冲式速度传感器conflicting相矛盾的payload有效载荷handling操作稳定性compromise妥协via通过resonant引起共鸣的roll侧倾pitch俯仰active suspension system主动悬架系统load carrying承载能力passenger comfort乘客舒适性sprung mass簧载质量unsprung mass非簧载质量oleo-pneumatic actuator油汽执行机构unit16wring线路muffler消声器tailpipe排气管inductive感应式的disguise伪装potentiometer 电位计dominate支配transistor晶体管sake缘故pseudo假的replicate复制forklift铲车bulky大的mainstream主流standpoint立场catalytic converter催化式排气净化器gas gauge 汽油表adapter plate安装板battery pack蓄电池组mandatory强制的statistics统计学abrupt 突然的dashboard汽车等的仪表板feat技艺dummy假人Air bag安全气囊over time随着时间的过去to date到此为止beef up加强talcum powder滑石粉。
基于接地特性的轮胎滚阻与抓地性能评价方法

汽车工程Automotive Engineering2020年(第42卷)第12期2020(Vol.42)No.12 doi:10.19562/j.chinasae.qcgc.2020.12.010基于接地特性的轮胎滚阻与抓地性能评价方法梁晨,王国林,喻康颖,梅烨(江苏大学汽车与交通工程学院,镇江212013)[摘要]采用数字图像相关技术获取10条不同胎面花纹的205/55R16型子午线轮胎垂直加载后接地区域的变形分布,并构建了表达轮胎接地区几何和力学信息的参数化评价体系。
基于接地参数,采用偏最小二乘回归法对轮胎滚动阻力系数和制动距离进行回归预测,通过Bootstrap重抽样法对回归系数进行显著性检验,筛选岀对性能有显著影响的接地参数。
结果表明,用轮胎接地特征参数来评价轮胎滚阻和抓地性能的回归方程拟合效果较好,研究结果为高性能轮胎设计提供了一定的指导作用。
关键词:轮胎;接地特征;滚动阻力;抓地性能;数字图像相关技术;偏最小二乘回归Evaluation Method of Tire Rolling Resistance and Ground-grip PerformanceBased on Ground Contact CharacteristicsLiang Chen,Wang Guolin,Yu Kangying&Mei YeSchoo/of Automotive and Traffic Engineering,Jiangsu University,Zhen/iang212013[Abstract]The deformation distribution of ten205/55R16PCR radial tires with different tread patterns in ground contact area after vertical loading are obtained by using digital image correlation technology ,and a parameterized evaluation system is constructed to express the geometric and mechanical information in ground contact area. Based on ground contact parameters,the tire rolling resistance coefficient and braking distance are predicted by using partial least square regression method.Bootstrap resampling method is adopted to conduct significance check on regression coefficient,and the ground contact parameters with significant effects on tire performance are selected. The results show that when tire-ground contact parameters are used to evaluate the rolling resistance and ground grip performance of tire,the regression equation fitting result is rather good.The outcome of this study provides a certain guiding role in high-performance tire design.Keywords:tires;ground contact characteristics;rolling resistance;ground grip performance;digital image correlation technology;partial least square regression前言轮胎是影响汽车行驶安全和燃油消耗的关键因素。
汽车专业英语(课后词组)

Unit 1 automotive basicsPower train 传动系Unitized body(or unibody)承载式车身,无大梁车身Suspension system 悬架系统Steering system 转向系Barking system 制动系Shock absorbers 减振器Control arms 控制臂Steering wheel 转向盘Steering column 转向管柱Steering gears 转向器Tie rod 横拉杆Idler arm随动臂Brake shoe 制动蹄(片)Disc brake 盘式制动器Drum brakes 鼓式制动器Ignition system 点火系统Exhaust system 排气系统Lubrication system 润滑系Oil filters 机油滤清器Drive(or propeller)shaft 传动轴Universal joints 万向节Steering box 转向器Timing gear 正时齿轮Bevel gear 锥齿轮,伞齿轮Mesh with 与啮合Leaf springs 钢板弹簧Stub axle 转向节Unit 2 automotive engine 汽车发动机Internal-combustion engine 内燃机Diesel-fuel 柴油机燃料,柴油LPG=Liquefied Petroleum Gas 液化石油气体CNG=Compressed natural gas 压缩天然气Spark ignition 火花点火Compression ignition 压缩点火Spark plug 火花塞Gas-turbine engine 燃气涡轮发动机Steam engine 蒸汽机Stirling engine 斯特灵发动机Lubricating system 润滑系统Oil pan油底壳Oil pump 机油泵Exhaust system 排气系统Emission-control system 排放控制系统Energy conversion 能量转换Air/fuel ratio 空燃比Connecting rod 连杆TDC=Top Dead Center 上止点BDC=Bottom Dead Center 下止点Intake stroke 进气冲程Compression stroke 压缩冲程Power stroke 做功冲程Exhaust stroke 排气冲程Compression ratio 压缩率,压缩比Valve train 配气机构Cam follower 凸轮随动杆,气门挺柱(摇臂)Rocker arm 摇臂Combustion chamber 燃烧室Intake valve 进气阀Exhaust valve 排气阀Valve stem 气门杆Valve cover 气门室盖(罩)Valve port 阀口Valve guide 气门导管Unit 3 automotive lubrication system 汽车润滑系统Start-up 起(启)动Engine block 发动机汽缸体Dry-sump 干油底壳Wet-sump 湿油底壳Pick-up tube 机油吸油管Filter screen 滤网Full-flow filtering system 全流式滤清器Pressure-relief valve 安全阀,卸压阀Bypass valve 旁通阀Gear type oil pump 齿轮式机油泵,齿轮泵Jockey pulley 张紧轮,导向轮Corrosion inhibitor 阻蚀剂,腐蚀抑制剂Detergent-dispersant 清洁分散剂Viscosity index 粘度指数Foam inhibitor 泡沫抑制剂Unleaded fuel 无铅汽油Over-tighten 过紧SAE=Society of Automotive Engineers (美)汽车工程师学会Comply with 照做Unit 4 the cooling system 冷却系统Expansion(overflow)tank 膨胀箱,溢流箱On the other hand 另一方面Not to mention 更不用说Out of the action 不起作用,停止使用Water jacket 水套Combustion chamber 燃烧室Pressure cooker 高压锅Be designed to 目的是,用来Psi=pound per square inch 磅/平方英寸Pick …off 摘去,拾取Air conditioning condenser 空调冷凝器Top off 终止,完成,结束Unit 5 fuel injection system 燃油喷射系统Electric pump 电动燃油泵Pulse width 脉冲宽度Fuel rail 油轨Return line 回油管路Fuel pressure regulator 燃油压力调节器Throttle body assembly 节气门体总成Solid state pressure transducer 晶体管压力传感器Measure off 量出Hall effect sensor 霍尔效应传感器Taper off 逐渐减少Stand for 代表Inline pump 直列式(喷油)泵Fuel feed pump 输油泵Vane pump 叶片式泵Cam disk 平面凸轮Drive shaft 传动轴Be attached to 固定在…,连到…上,附属于Spill port 溢流口Effective stroke 有效(供油)行程Plunger barrel 柱塞套Build up 积累,增加Control sleeve 控制套筒Delivery valve 出油阀In detail 详细地Unit 6 exhaust system 排气系统Stick out 伸出,显眼,触目The body of a car 车身Cast iron 铸铁Catalytic converter 催化转换器Out of phase with 与…相反Collide with 与…相撞Cancel out 取消Backpressure 背压Sulfur dioxide 二氧化硫Carbon monoxide 一氧化碳Nitrogen oxide 氮氧化物Exhaust gas re-circulation(EGR)废气再循环Tend to 必然Carburetor bowl 化油器浮子室Charcoal canister 炭罐Check valve 止回阀Gulp valve 补气阀Diverter valve 换向阀,分流阀As a result 结果Stepper motor 步进电机PCV=positive crankcase ventilation 曲轴箱强制通风Unit 7 the ignition system 点火系统Breaker point type ignition system 触点型点火系统Distributorless ignition system 无分电器点火器Primary and secondary circuits (点火线圈的)初级电路和次级电路Magnetic field 磁场High tension lead 高压导线Distributor rotor 分火头Spark plug 火花塞Nothing more than 只不过是,简直是(be)different than 与…不同,不同于Little or no 几乎没有,简直没有As follows 如下According to 根据Boil down to 归结起来是Listen for 听听(有否…),等着听The moment 一…就Unit 8 clutch 离合器Drive train 传动系Drive shaft 驱动轴,传动轴Pressure plate 压盘Clutch disc 离合器从动盘,离合器摩擦片Gear ratio 传动比,齿轮齿数比Release bearing 分离轴承Release fork 分离拨叉Master cylinder 主缸Clutch pedal 离合器踏板Coupling device 接合装置At idle 空转,空闲Couple with 与…连接,与…结合Ring gear 环形齿轮,齿圈,冕状齿轮Pinion gear 小齿轮Splined hub 花键毂Cast iron 铸铁,锻铁Diaphragm spring 膜片弹簧Thrust pad 止推(推力)垫Engage with (齿轮等)与…啮合,接合Centrifugal force 离心力Fulcrum ring (膜片弹簧)支撑环Pilot bushing 导轴衬,控制轴衬Bell housing 钟形外壳,离合器壳,变矩器外壳Torque converter (液力)变矩器Gas pedal 加速踏板One-way clutch 单向离合器,超越离合器Gas mileage 加仑英里,燃油经济性Get up to 达到Unit 9 automotive transmission 汽车变速器Fluid coupling 液力耦合器Torque converter 液力变矩器,转矩变换器Planetary gear set 行星齿轮组Throttle cable 节气门拉线(索)Ring gear 齿圈High gear 高速档Reverse gear (汽车)倒档Sprag clutch 楔块式超越(单向)离合器Centrifugal force 离心力Gear up 使换快档,促进,增加Stick shift 顶档杆(一种具有用手操纵的换挡杠杆的自动换挡装置)Vacuum hose 真空软管Throttle valve 节流阀Leak out 泄漏Windshield wiper 风窗玻璃刮水器(雨雪刷)Continuously variable transmission 无级变速器Drive ratio 传动比Metal V-belt 金属V带Select shift manual(SSM)手动选档的机械变速器Auto shift manual(ASM)自动选档的机械变速器Along with 连同…一起Adaptive transmission control(ATC)(自动变速器)自适应式变速器控制Electronically controlled automatic transmission 电控自动变速器Unit 10 the differential 差速器Limited-ship differential(LSD)防滑差速器Drive shaft 传动轴Axle shafts 半轴,驱动轴Final drive assembly 主减速器总成,最终传动装置Gear reduction 齿轮减速Gear reduction ratio 齿轮减速比Spiral bevel gear 螺旋锥齿轮Side gear(differential gear)半轴齿轮Pinion shaft 行星齿轮轴Differential pinion 行星齿轮Drive pinion (主减速器)主动小齿轮Final drive 主减速器,最终传动Drive wheel 驱动轮Limited-ship differential 防滑差速器Unit 11 brake system 制动系统Thermal energy 热能Master cylinder 制动主缸Brake pedal 制动踏板Brake hose 制动软管Slave cylinder 轮缸,分泵Drum brake 鼓式制动器Brake shoe 制动蹄(块),闸皮Bleeder screw (制动系)放气螺钉Spongy pedal 踏板发软Panic stop 紧急停车,紧急制动Friction lining 摩擦衬片Proportioning valve 比例阀,定量阀,配合阀Equalizer valve 平衡阀Pressure differential valve 差压(调节)阀Combination valve 组合阀a.k.a.=also known as 又名…Emergency brake 紧急制动器,紧急闸,应急制动Brake booster 制动助力器Flat spot (胎面)平点Hydraulic actuator 液压传动(操纵)机构,液压动力缸Fling off 掷出,甩掉,扔掉Splash through 溅着水通过,涉水通过Slotted hole 长圆孔,长孔,缝槽,切口Brake Pads 制动块Do with 利用,忍受(满足)Unit 12 steering system 转向系统Rack-and-pinion 齿条齿轮式Recirculating ball 循环球式Tie rod 转向横拉杆Steering ratio 转向减速比,转向变速比Variable-ratio steering 可变速比转向,可变传动比转向装置Tooth pitch 齿节,齿距Turning limit 转向限值Power-steering system 动力转向系统Worm gear 涡轮,涡轮传动机构Pitman arm 转向垂臂,转向摇臂,转向臂Threaded rod 螺杆Ball bearing 球轴承,滚球轴承Rotary-vane pump 回转式叶片轮,叶片轮Retractable vane 可伸缩叶片Pressure-relief valve 安全阀,卸压阀Rotary valve 回转阀,转阀Spool-valve 滑阀,柱式滑阀Electronic control system 电子控制系统Wheel alignment 车轮定位Steering geometry 转向梯形机构,转向几何机构Steering angle 转向角Toe in 前轮前束Toe out 负前束,后束Turning radius 转向半径Tire-tread 轮胎胎面Cotter pin 开口销Unit 13 suspension system 悬架系统Unit body 组合车身Coil spring 螺旋弹簧Leaf spring 钢板弹簧,片弹簧Torsion bar 扭力杆,扭杆弹簧Station wagons 客货两用轿车,旅行车Spring eye 钢板弹簧卷耳Rubber bushing 橡胶衬套Bolt head 螺栓头Spring shackle 板簧吊环A-arm front suspension 叉形控制臂前悬Torsion bar strut suspension 扭杆弹簧前悬Macpherson strut suspension 麦弗逊滑柱悬架Upper control arm 上控制臂Ball joint 球形接头,球节,球窝关节Stabilizer bar 稳定杆,防止车厢侧倾稳定杆Cornering force 回转力,侧向反力Shock absorber 减振器,阻尼器Trailing links (悬架)纵(拖)臂,纵向拉杆Pinion angle 小齿轮角U-joint 万向节,万向接头U-bolt U形螺栓,骑马螺栓Force-and-aft 纵向的,前后的Parallel link 平行杠杆式连结Parallelogram system 平行连杆系统Swinging arm 摆臂Transverse leaf spring 横置钢板弹簧Swivel pin 转向节主销,旋转销Swinging half-axle 摆动半轴Over-steer 过多转向。
Sandvik RD520液压钻机技术规格说明书
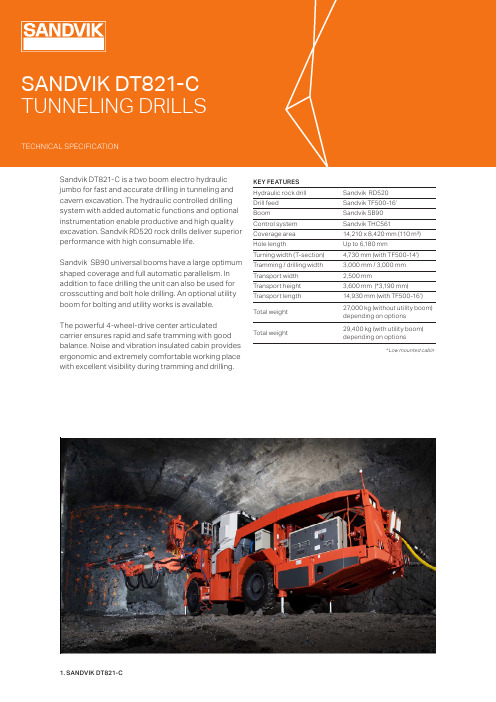
KEY FEATURES Hydraulic rock drill Sandvik RD520Drill feed Sandvik TF500-16’BoomSandvik SB90Control system Sandvik THC561Coverage area 14,210 x 8,420 mm (110 m²)Hole lengthUp to 6,180 mmTurning width (T-section)4,730 mm (with TF500-14’)Tramming / drilling width 3,000 mm / 3,000 mm Transport width 2,500 mmTransport height 3,600 mm (*3,190 mm) Transport length 14,930 mm (with TF500-16’)Total weight 27,000 kg (without utility boom)depending on options Total weight29,400 kg (with utility boom)depending on options* Low mounted cabinSandvik DT821-C is a two boom electro hydraulic jumbo for fast and accurate drilling in tunneling and cavern excavation. The hydraulic controlled drilling system with added automatic functions and optional instrumentation enable productive and high quality excavation. Sandvik RD520 rock drills deliver superior performance with high consumable life.Sandvik SB90 universal booms have a large optimum shaped coverage and full automatic parallelism. In addition to face drilling the unit can also be used for crosscutting and bolt hole drilling. An optional utility boom for bolting and utility works is available. The powerful 4-wheel-drive center articulated carrier ensures rapid and safe tramming with good balance. Noise and vibration insulated cabin provides ergonomic and extremely comfortable working place with excellent visibility during tramming and drilling.BOOM TECHNICAL SPECIFICATION 4-3205Boom type Sandvik SB90Parallel coverage 90 m²Parallelism Hydraulic Boom extension 1,800 mm Feed extension 1,650 mm Boom weight, net 2,650 kg Roll-over angle358°HYDRAULIC SYSTEM Powerpack HPP555 (2 x 55 kW)Percussion pump 110 cc (variable)Rotation pump 60 cc (variable)Filtration size 20 micron (pressure)10 micron (return)Oil tank volume 290 liters Tank filling Electric pumpOil coolerWater cooled.Cooling capacity 2 x 30 kWHYDRAULIC ROCK DRILL TECHNICAL SPECIFICATION 2-1950Rock drillSandvik RD520Percussion power 20 kW Percussion pressure Max. 220 bar Percussion rate 74 Hz Stabilizer HydraulicRotation speed Max. 280 rpm (with OMS125)Rotation torque 625 Nm (with OMS125)Hole size (drifting)43 - 64 mm Hole size (cut hole)76 - 127 mm Recommended rod T38 - H35 - R32T38 - R39 - R35Shank adapter T38 (male)Weight 225 kg Length 1,010 mm Profile height90 mmShank lubrication device Air / oil mist, SLU-2Air consumption 250 - 350 l/min Oil consumption180 - 250 g/hFEED TECHNICAL SPECIFICATION 3-1400Feed type Feed force (Max.)Total length (mm)Hole length (mm)Rod length (mm)Net weight (kg)TF51225 kN 5,2703,4403,700500TF51425 kN 5,8804,0504,305530TF51625 kN 6,4904,6604,915560TF51825 kN 7,1005,2705,525590TF52025 kN7,7105,8806,135620CONTROL SYSTEM TECHNICAL SPECIFICATION 5-1020TypeTHC561, hydraulic Manual boom control Direct control Fully proportional Hydraulic parallelism Drilling control Feed / percussion control Automatic cycleStop and return automaticsOptions• Feed length 12’, 14’, 18’, 20’.• Telescopic feed. Sandvik TFX6/12, TFX8/14, TFX10/16.• Rod retainer. SCR with TF feed (incl. safety wire).• Rod retainer. TRR1 with TFX feed (incl. safety wire).Options• Utility boom pump 60cc (gear).• Manual oil filling pump instead of electric.• Vacuum pump for hydraulic system.• Biodegradable oils. Shell Naturelle HFE46 / HFE68.Options• Sandvik HLX5 instead of Sandvik RD520.• Power extractor.Options• Constant speed drilling. Replaces feed / percussion control.• Instrumentation TCAD+ with iSURE I-II design and reporting.• iSure III Analysis (with TCAD+ option).• Extra display for TCAD+ELECTRIC SYSTEM Total input power 135 kW Main switch MSE20IP classification Spec. sheet TS2-132Standard voltage 380 - 690 VAC (± 10%)Starting method Star-delta starter 380 - 690 VAC Automatic cable reel TCR4ECable reel control (in / out)Operator station Front lights(combined working and driving)8 x 50 W LED (24VDC)Rear lights(combined working and driving)4 x 50 W LED (24 VDC)Rear brake / park lights2 x Red LEDUTILITY BOOM (OPTIONAL) TECHNICAL SPECIFICATION 4-3420Boom type SUB3A Boom extension 2 x 2,000 mm Boom weight,net 2,350 kg Max allowed load510 kg Max allowed load with safety canopy400 kgOptions• Safety canopy for utility boom. FOPS approved.• Spot lights for utility boom. 2 x 17 W LED.• Rod racks for utility boom. For 4 pcs of 10 or 12 ft rods.• RX expansion bolt installation kit for utility boom. D30 mm or D41 mmFLUSHING SYSTEM FlushingWaterWater pump type WBP2 HP (11 kW)Water pump capacity 200 l/min Water pump inlet pressure 2 - 7 bar (Min.)Flushing water pressure 10 - 15 barAir compressorCTN10, 1 m³/min (7 bar, 7.5 kW)TRAMMING AND OPERATOR STATION Tramming speed 16 km/h (Horizontal)5.4 km/h (14%=1:7=8°)Gradeability / inclination Max. 15° / 5°Safety cabin FOPS (ISO 3449)OperationStanding drilling, seated tramming Sound pressure level According to EN791Operator station: 79 db(A)Emitted: 125 db(A)Stairs and service lights LED lights FloorWater-washable Air conditioning Filtering capacity EU6/7Cabin heating During tramming and drilling Electricity outlets1 x 12 VACOptions• Optional voltage. 1,000 VAC, 50 Hz.• Electric cable rubber or PUR. Spec sheet TS2-121.• Spooling device for cable reel. for voltages 690 - 1,000 VAC • Electricity outlet in front carrier. 1 x 400 VAC or 1 x Main voltage.• Remote control for reel(s) at rear machine.• Amber strobe light. Flashing (24VDC).Options• Flushing flow supervision.• Air cleaning of hole in addition to water flushing. CTN16 air com -pressor.• Air mist flushing. External air / water supply (incl. IP5 air cleaner).• Additional air capacity for hole cleaning with air. 2 x 80 liters receiver (incl. IP5 air cleaner).• External air connection. IP5 air cleaner.• Water hose reel. THR2.5E. (incl. water hose 38 mm (1 ½”), 65 m).Options• Stainless steel cabin. FOPS (ISO 3449).• Low mounted cabin. Height 3,190 mm.• Reduced tramming speed. 3rd gear lockout.• Reversing camera the rear and side of the machine.• Boot washer at cabin entrance.• CD/MP3 player with radio.Options• High speed carrier. TC8, incl. MB OM906LA, 170 kW, Tier 3, Stage IIIA, with Spicer T32 000 transmission.• High speed carrier. TC8, incl.QSB6.7, 164 kW, Tier 4i, Stage IIIB, with Spicer T32 000 transmission.• Optional engine. QSB4.5, 119 kW, Tier 4i , Stage IIIB.• Foam filled tires.• Exhaust catalyzer. For Tier 3 engines.• Rod rack under carrier. For 12 - 20 ft rods.• Fast filling system. For fuel or complete • Wheel chocks and holders. 2 pieces.• LP cleaning system with reel. Max. 15 bar.• HP cleaning system with reel. Max. 180 bar.• Greasing unit with pump, reel and nozzle. Manual.• Automatic greasing system. Carrier, booms and utility boom.• Handheld fire extinguisher. 1 x 7.7 kg type ABC• Manual fire suppression system. 8 nozzles (incl.1 x extinguisher).• Auto. fire suppression system. 8 nozzles (incl.1 x extinguisher).• Access Detector system (Spec. TS2-211).Packages• Regional packages. EUR package.• Anti-freezing package: Block heater for engine, heater for hy -draulic oil, Water circuit flushing with air, antifreeze adding in water circuit.Extra items• Ground fault and overcurrent protection (VYK).• Spare rock drill.• Spare wheel assembly.• Special tools for rock drill.• Tunnel laser set.• Documentation. Extra manuals.CARRIER Carrier Sandvik TC8Carrier type Frame steering, Orbitrol Frame steering ± 37°Rear oscillation ± 8°Ground clearance 400 mmDiesel engine MB OM904LA, 110 kW Tier 3, Stage IIIATransmissionHydrodynamic, Spicer T20 000Axles Dana Spicer 113 (front)Dana Spicer 123 (rear)Tires14.00-24 PR28Service brakes Hydraulic wet disc brakesParking andemergency brakes SAHR type, fail safe wet disc brakes Fuel tank 150 litersHydraulic jacks TJ60 (front), TJ75 (rear)Hand throttleStandardCentralized greasing points CarrierTF500-12’TF500-14’TF500-16’TF500-18’TF500-20’Feed length 5,330 mm 5,940 mm 6,550 mm 7,160 mm 7,770 mm Overall length14,680 mm 14,900 mm 14,900 mm 15,350 mm 16,400 mm Overall length with TRR114,710 mm14, 930 mm14,930 mm15,380 mm16,430 mmAngle (A)Radius (R)T-cross (C)DT821-C (TF500-12’)mm 37°7,9404,730DT821-C (TF500-14’)mm 37°7,9404,730DT821-C (TF500-16’)mm 37°8,0504,840DT821-C (TF500-18’)mm 37°8,1904,980DT821-C (TF500-20’)mm 37°8,3005,090T S 2-219:01/E N G /M E T R I C © S a n d v i k C o n s t r u c t i o n 2015 S A N D V I K i s a r e g i s t e r e d t r a d e m a r k o w n e d b y S a n d v ik I n t e l l e c t u a l P r o p e r t y A B i n S w e d e n a n d o t h e r c o u n t r i e s .Sandvik Construction reserves the right to make changes to the information on this data sheet without prior notification to users. Please contact a Sandvik representative for clarification on specifications and options.All dimensions in mmAll dimensions in mmAll dimensions in mm。
外文翻译-驾驶者的转向感英文

405 Driver perception of steering feelA C Newberry1,2*,M J Griffin1,and M Dowson21Human Factors Research Unit,University of Southampton,Southampton,UK2Jaguar Cars Ltd,UKThe manuscript was received on25July2006and was accepted after revision for publication on4January2007.DOI:10.1243/09544070JAUTO415Abstract:Steering feel is optimized at a late stage of vehicle development,using prototypevehicles and expert opinion.An understanding of human perception may assist the develop-ment of a good‘feel’earlier in the design process.Three psychophysical experiments havebeen conducted to advance understanding of factors contributing to the feel of steering sys-tems.Thefirst experiment,which investigated the frames of reference for describing the feel(i.e.haptic properties)of a steering wheel,indicated that subjects focused on the steady stateforce that they applied to the wheel rather than the steady state torque,and on the angle thatthey turned the wheel rather than the displacement of their hands.In a second experiment,thresholds for detecting changes in both steady state steering-wheel force and steady statesteering-wheel angle were determined as about15per cent.The rate of growth in the perceptionof steady state steering-wheel force and steady state steering-wheel angle were determinedusing magnitude estimation and magnitude production.It was found that,according to Stevens’power law,the sensation of steady state steering-wheel force increases with a power of1.39with increased force,whereas the perception of steady state steering-wheel angle increaseswith a power of0.93with increased steering-wheel angle.The implications for steering systemsare discussed.Keywords:steering feel,proprioceptive,haptic feedback1INTRODUCTION wheel(subject to kinematic losses through the steer-ing system,and subject to various assist methods in Driving a car is a complex task and involves manysteering systems,e.g.hydraulic and electric power interactions between the driver and the vehicle assist)where the driver can interact with them and through the various controls.Good performance ofdevelop an internal model of the steering properties the system depends on how well a car is able to and the environment.create the driver’s intentions,and how well differ-The relationship between the steering-wheel ences between those intentions and the vehicle’s torque and the steering-wheel angle has been con-sidered a useful means of describing steering feel[1]. response can be detected by the driver.The steeringsystem is one of the primary controls in a car,Various‘metrics’of the relationship are used to define allowing the driver to control the direction of thesteering feel[2–5],and experiments have found that vehicle.The steering system not only allows the changing the relation between the steering-wheel driver to control the car but also provides the driverforce and steering-wheel angle can alter the driving with feedback through haptic(i.e.touch)senses,experience[6].Knowledge of the way in which haptic giving cues to the state of the road–tyre interface.stimuli at the steering wheel are perceived by drivers Forces originating at the road–tyre interface(and may therefore assist the development of steering-related to the road wheel angle,vehicle speed,andsystem designs.The perception of stiffness[7]and the perception road adhesion),present themselves at the steeringof viscosity[8]seem to come from force,position,and *Corresponding author:Human Factors Research Unit,Univer-velocity cues.Psychophysiological studies indicate sity of Southampton,Tizard Building,Southampton,UK.email:that muscle spindle receptors,cutaneous mechano-receptors,and joint receptors provide the neural acn@406A C Newberry,M J Griffin,and M Dowsoninputs used in the perception of the movement andforce applied by a limb[9].Psychophysics provides techniques to describe howsubjects perceive stimuli.Classic measures includethe difference threshold(the minimum changeneeded to detect a change in a stimulus)and thepsychophysical function(the relationship betweenchanges in stimulus magnitude and the perceptionof those changes).However,thefirst step in quanti-fying steering feel using psychophysical methods isto identify what aspects of the haptic feedback at thesteering wheel are used by drivers.Steering torque and steering angle describe thesteady state characteristics of steering systems andtheir relationships have been identified as influencingsteering feel[2–5].It seems appropriate to check Fig.1Test apparatuswhether subjects are judging what the experimenteris measuring.It has not been shown whether theby a rapid prototype polymerfinished with pro-properties of steering system should be describedduction quality leather glued and stitched on to the in rotational frames of reference(i.e.torque andgrip.angle)or translation frames of reference(i.e.forceSubject posture was constrained by the seat, and displacement).steering wheel,and heel point.The joint angle at the This paper describes three experiments designedelbow was monitored and adjusted to110°for all to study how drivers perceive the steady statesubjects to ensure that they did not sit too close or properties of steering wheels.Thefirst experimenttoo far from the steering wheel.investigated whether rotational or translation framesThe steering-column assembly included an optical of reference are more intuitive to subjects.It wasincremental encoder to measure angle(resolution, hypothesized that,if asked to‘match’different0.044°),a strain gauge torque transducer to measure steering-wheel sizes,either the rotational or thetorque(0.01N accuracy),bearings to allow the wheel translation frame of reference would be matchedto rotate freely(isotonic control),and a clamp to lock more consistently.The second experiment deter-the column in position(isometric control).mined difference thresholds for the perception ofsteering-wheel force and angle,with the hypothesisthat Weber’s law would apply for both stimuli.The3EXPERIMENTSthird experiment investigated the psychophysicalscales for the perception of the physical propertiesThree experiments were performed to investigate the at steering wheels by determining relationshipsresponse of the driver to steady state steering-wheel between steering-wheel force and the perception ofproperties and to determine,firstly,the driver frame steering-wheel force,and between steering-wheelof reference,secondly,the difference thresholds for angle and the perception of steering-wheel angle.Itthe perception of force and angle,and,thirdly,the was hypothesized that Stevens’power law provides anrate of growth of sensations of force and angle. adequate model for describing the psychophysicalThe experiments were approved by the Human scales.Experimentation,Safety and Ethics Committee ofthe Institute of Sound and Vibration Research at theUniversity of Southampton.2APPARATUS3.1Driver’s frame of referenceA rig was built to simulate the driving position of a2002model year Jaguar S-type saloon car as shown Frames of reference provide means for representing in Fig.1.The framework provided a heel point forthe locations and motions of entities in space.There subjects and supported a car seat and steering are two principal classifications for reference frames column assembly.The cross-section of a Jaguarin spatial perception:the allocentric(a framework S-type steering wheel was used to create the grips of external to the person),and the egocentric(a frame-the experimental steering wheel,which was formedwork centred on the person).For some tasks,the407Driver perception of steering feelchoice of reference frame may be merely a matter‘match’the sensation experienced with the referencewheel.Subjects were required to achieve the refer-of convenience.In human spatial cognition andence or match within6s,and to hold the force or navigation the reference frame determines humanangle for4s.Subjects were required to move their perception.The haptic perception of steering-wheelhands to the test condition within the6s given to position and motion is influenced by the spatialachieve the match.The total time for one reference constraint imposed on the wheel,which can onlyand match trial was20s.rotate about a column.Subjects attended two sessions,one with isometric In engineering terms,it is convenient to describesteering wheels and one with isotonic steering the motion of a steering wheel in a rotational framewheels.Four reference conditions were presented in of reference using steering-wheel torque and steering-each session:5N,15N,1.5N m,and3N m with the wheel angle.However,drivers may use a differentisometric steering wheels,and3°,9°,10mm,and frame of reference when perceiving the feel of a30mm with the isotonic steering wheels.The forces steering system;they may perceive steering-wheeland distances refer to the forces and distances at the force rather than steering-wheel torque,and steering-rim of the steering wheel.wheel displacement rather than steering-wheel angle.For this experiment,12male subjects,aged between Alternatively,drivers may use neither allocentric18and26years,took part using a within-subjects nor egocentric frames of reference and insteadexperimental design where all subjects participated may employ some intermediate reference frame asin all conditions.The order of presentation of the suggested by Kappers[10].reference conditions was balanced across subjects. This experiment aims to test whether driversFor six subjects,thefirst session used the isometric sense steering-wheel force or torque,and whethersteering wheels;for the other six subjects,thefirst they sense angle or displacement.The relationshipssession used the isotonic steering wheels.between these properties areFor each reference condition,a total of18trials T=rF(1)were undertaken:nine trials to account for eachcombination of three reference wheels and three x=r h(2)diameters of test wheel(small,medium,and large) To investigate which variable is intuitively used by including matching to the same wheel,and a repeat drivers,it is necessary to uncouple the relationship of these nine conditions.between rotational and translation frames of refer-The length of time that subjects were required to ence.This can be achieved by altering the radius of hold a force or torque was minimized to prevent the steering wheel.It was hypothesized that,when fatigue.Typically,subjects took10s to reach the asked to‘match’a reference condition using iso-desired force or angle.The view of their hands was metric steering wheels(i.e.wheels that do not rotate)obscured so that subjects did not receive visual with varying radii,subjects would match either the feedback of their position or movement.force applied by the hand or the torque applied tothe steering wheel.It was similarly hypothesized that, 3.1.2Resultswhen using isotonic steering wheels(i.e.wheels thatThe results for a typical subject in the experiment rotate without resistance to movement)with varyingwith isometric control are shown in terms of force in radii,subjects would match either the displacementFig.2,and in terms of torque in Fig.3.The results of the hand on the steering wheel or the anglefor a typical subject in the experiment with isotonic through which the steering wheel was turned.control are shown in terms of angle in Fig.4and interms of displacement in Fig.5.3.1.1MethodCorrelation coefficients between the physical Using the‘method of adjustment’[11],subjects magnitudes of the reference condition and the test ‘matched’sensations from a‘reference’steering condition are presented for each subject in Table1. wheel to a‘test’steering wheel.When grasping the For isometric control,correlation coefficients were reference wheel,subjects were required to achieve obtained for both torque and force at the steering-a desired stimulus magnitude by acting on the wheel rim.For isotonic control,correlation coeffi-wheel in a clockwise direction using visual feedback cients were obtained for both angle and displace-from afixed11-point indicator scale on a computer ment at the steering-wheel rim.It was assumed that monitor.Instructions on the computer monitor then the variable with the greater correlation(i.e.either instructed the subjects to move their hands to either force or torque,or angle or displacement)is the most the‘small’,‘medium’,or‘large’steering wheel,and toefficient engineering term to represent the data.408A C Newberry,M J Griffin,and M DowsonFig.4Relation between steady state reference angle Fig.2Relation between steady state reference torque and test angle for isotonic control(data from and test torque for isometric control(data from one subject)one subject)Fig.5Relation between steady state reference dis-placement and test displacement for isotonic Fig.3Relation between steady state reference forcecontrol(data from one subject) and test force for isometric control(data fromone subject)3.1.3DiscussionOver the12subjects,for isometric control,the Lines of bestfit to the data had gradients of less correlation coefficients obtained for force were than unity for11subjects.The single subject that significantly higher than those obtained for torque achieved a slope greater than1.0did so only for (p<0.01,Wilcoxon matched-pairs signed-ranks test).angle data.The effect could have arisen from the For isotonic control,the correlation coefficients reference being presentedfirst(i.e.an order effect). obtained for angle were significantly higher than Alternatively,it could indicate that the physical those obtained for displacement(p<0.01).variables do not reflect the parameters adjusted by409Driver perception of steering feelTable1Spearman’s rho correlations coefficients r is described in terms of a‘Weber fraction’or percent-between reference magnitude and test magni-age.Weber proposed that the absolute difference tude(all Spearman rho correlation coefficients threshold is a linear function of stimulus intensity in the table are significant at p<0.01)and can therefore be described as a constant per-centage,or fraction,of the stimulus intensity.This is Correlation coefficient rexpressed in Weber’s lawIsometric wheel Isotonic wheelSubject Torque Force Angle Displacement D ww=c(3)10.360.730.890.4920.430.820.790.48where c is a constant known as the‘Weber fraction’, 30.560.890.820.55often expressed as a percentage.40.710.820.690.4650.710.810.740.69Difference thresholds for the perception of force 60.790.760.790.66are available in a variety of forms.Jones[12]reported 70.680.770.750.73the difference threshold as a Weber fraction of0.07 80.720.760.800.6290.530.840.890.60(7per cent)for forces generated at the elbowflexor 100.720.840.780.53muscles.Difference thresholds for lifted weights 110.530.890.790.69120.620.850.900.60have been reported by Laming[13]based on anexperiment by Fechner[14]using weights from300to3000g,resulting in a Weber fraction of0.059(5.9per cent),and Oberlin[15]measured difference the subjects.Regardless of the deviations of refer-thresholds for lifted weights from50to550g,giving ences and‘matches’from the45°line,the Spearmana Weber fraction of0.043(4.3per cent). correlations ranked the reference and‘match’dataHaptic discrimination offinger span with widths according to magnitude without making any assump-varying from17.7to100mm have been reported as tions about the exact values of the reference and0.021(2.1per cent)by Gaydos[16].Discrimination the‘match’.of elbow movement has been reported as8per cent The results suggest that with idealized isometricby Jones et al.[17],while discrimination of sinusoidal and isotonic controls,drivers have a better sense ofmovements of thefinger studied by Rinker et al.[18] steering-wheel force than steering-wheel torque andproduced difference thresholds that ranged from a better sense of steering wheel-angle than steering-10per cent to18per cent.wheel displacement.It seems that subjects used theThe present experiment investigated difference forces in their muscles and the angles at the jointsthresholds for steady state steering-wheel force of their hands and arms to position the steering(using an isometric steering wheel),and difference wheels.thresholds for steady state steering-wheel angle To judge torque,subjects would need to combine(using an isotonic steering wheel).estimates of force with knowledge of the distancebetween their hands and the centre of the steer-ing wheel.To judge the displacement of the steering- 3.2.1Methodwheel rim,subjects would need to combineDifference thresholds were determined with a two-estimates of their joint angles with the length ofalternative forced-choice procedure using an up-their limbs.The estimation of torque and distanceand-down transformed response(UDTR)method requires more information and greater processing[19].Subjects were required to act on the steering than the estimation of force and angle.Consequently,wheel to achieve a reference force or reference it is not surprising that torque and distance result inangle,followed by a test stimulus.The required levels less accurate judgements and are not preferred orfor both actions were presented on a character-‘natural’.less11-point scale on a computer monitor.The refer-ence stimulus and a test stimulus were presented 3.2Difference thresholdssequentially,and in random order,to subjects whowere required to report which of the two stimuli‘felt A difference threshold is the smallest change in astimulus required to produce a just noticeable differ-greater’.The UDTR method was used with a three-down one-up rule(i.e.three correct responses in a ence in sensation[11].Difference thresholds can bedescribed in absolute terms,where the threshold row caused the test stimulus to become closer to thereference stimulus whereas one incorrect response is described in the physical units of the variableunder test,or in relative terms,where the threshold resulted in an increase in the difference between the410A C Newberry,M J Griffin,and M Dowsonreference and the test stimulus).The three-up one-down rule means that the difference threshold isobserved at a79.4per cent correct response level[19].Three reference magnitudes were used in eachsession:5.25N,10.5N,and21N for the isometricsteering wheel,and4°,8°,and16°for the isotonicsteering wheel.To determine a difference thresholdfor each reference,subjects made a sequence ofjudgements,with the total number of judgementsdictated by their responses.The sequence wasterminated after three‘up’and three‘down’reversalsof direction.The difference threshold was measuredas the mean value of the last two‘up’and the lasttwo‘down’reversals.For this experiment,12male subjects,aged between18and28years,took part using a within-subjectsexperimental design.The order of presentation forFig.6Absolute difference thresholds for steady state the reference conditions was balanced across sub-force and angle(medians and interquartile jects with six subjects starting with isotonic control,range)and six starting with isometric control.3.2.2ResultsThe median absolute and relative difference thresh-olds are shown in Table2.For both force and angle,the absolute difference thresholds increased signifi-cantly with increasing magnitude of the reference(p<0.01,Friedman test).The median absolute and relative difference thresh-olds for both force and angle are shown in Fig.6andFig.7respectively.The median relative differencethresholds tended to decrease(from16.5per cent to11.5per cent)with increases in the reference forceand decrease(from17.0per cent to11.5per cent)with increases in the reference angle.However,over-all,the relative difference thresholds did not differsignificantly over the three force references or overthe three angle references(p>0.4,Friedman test).3.2.3DiscussionThe statistical analysis implies that the relative Fig.7Relative difference thresholds for steady state difference thresholds were independent of force and force and angle(medians and interquartile angle and that Weber’s law can be upheld for therange)conditions of the study.Table2Median difference thresholds(N=12)Threshold values for the following reference valuesForce Angle Threshold(units) 5.25N10.5N21N4°8°16°Absolute difference threshold(units same as stimuli)0.87 1.58 2.420.68 1.12 1.84Relative difference threshold(%)16.515.011.517.014.011.5411Driver perception of steering feelThe mean relative difference thresholds across produce.The bias causes magnitude production to the magnitudes of the reference stimuli were15peryield steeper slopes(i.e.higher values for n)than cent when detecting changes in force and14per cent magnitude estimation.when detecting changes in angle.This suggests noThe third experiment employed both magnitude fundamental difference in the accuracy of detecting estimation and magnitude production to develop a changes in force and angle,implying that forcescale of perception of steady state steering-wheel and angle provide equally discriminable changes in force and steady state steering-wheel angle. feedback.For the perception of force,the15per cent relative3.3.1Methoddifference threshold was obtained with a correct per-formance level of79.4per cent.Direct comparison For magnitude estimation,a subjectfirst applied a with the aforementioned studies of the perception ofreference force(or angle)by acting on the steering force are not possible,as correct response levels are wheel in a clockwise direction.The reference was not presented in those studies.For the perception10.5N on the isometric steering wheel and9°on the of angle,14per cent in the present study compares isotonic steering wheel.Feedback was given on an with a difference threshold for limb movement in the11-point scale,with the reference in the middle of range10–18per cent(for a71per cent correct per-the scale.Subjects were told that the reference corre-formance level)according to Rinker et al.[18],andsponded to100.A subject then applied11different 8per cent(for a71per cent correct performance test forces(or angles)by applying a force or angle level)according to Jones et al.[17].until the pointer was placed at the middle mark ofthe11-point scale.The forces or angles requiredcorresponded to50per cent,60per cent,70per cent, 3.3Rate of growth of sensation80per cent,90per cent,100per cent,120per The rate of growth of sensation of stimuli has often cent,140per cent,160per cent,180per cent,and been determined using Stevens’power law[20]200per cent of the reference force or angle.Forforce,these stimuli ranged from 5.25N to21N y=k w n(4)while,for angle,they ranged from4.5°to18°.After where y is the sensation magnitude,w is the stimulusthe presentation of a test stimulus,a subject was intensity,k is a scalar constant depending on the asked to report a number considered to represent conditions,and n is the value of the exponent thatthe test force(or angle)in proportion to the refer-describes the rate of growth of sensation of the ence.The presentation order of the test stimuli was stimulus and depends on the sensory modality(e.g.randomized.For magnitude production,a subject perception of force,or perception of loudness).first applied a reference force(or angle)by acting on Previous studies have reported rates of growththe steering wheel in a clockwise direction.The refer-of sensation of force and weight with exponents ence was10.5N on the isometric steering wheeland9°on the isotonic steering wheel.Feedback was between0.8and2.0over a variety of experimentalconditions[21–24].A study of the haptic sensation given on an11-point scale,with the reference in the offinger span by Stevens and Stone[25]using widthsmiddle of the scale.The subject was told that this of2.3–63.7mm reported an exponent of1.33using corresponded to100.The scale was removed and a magnitude estimation.number was displayed instead(50,60,70,80,90, The value of the exponent n may be determined100,120,140,160,180,or200)and the subject was by either magnitude estimation or magnitude pro-asked to produce a force(or angle)corresponding duction.Magnitude estimation requires subjects to to the given number in proportion to the reference. make numerical estimations of the perceived magni-The presentation order of the test stimuli was tudes of sensations,whereas magnitude production randomized.For this experiment,12male subjects,aged requires subjects to adjust the stimulus to producesensory magnitudes equivalent to given numbers.between18and26years,took part using a within-These methods have systematic biases which Stevenssubjects experimental design.Subjects attended two [20]called a‘regression effect’[11].The biases sessions with the order of presentation of the force, are attributed to a tendency for subjects to limitangle,and magnitude estimation,and magnitude the range of stimuli over which they have control;so production conditions balanced across subjects. with magnitude estimation they limit the range ofThe exponent indicating the rate of growth of numbers that they report,and in magnitude pro-sensation was determined byfitting Stevens’power duction they limit the range of stimuli that theylaw to the data.With the stimulus and sensation412A C Newberry,M J Griffin,and M Dowsonplotted on logarithmic axes,the exponent is the slopen given bylog y=n log w+log k(5)3.3.2ResultsExponents for the rate of growth of sensation wereobtained from least-squares regression between themedian judgements of the12subjects for each testmagnitude and the actual test magnitude,with theapparent magnitude assumed to be the dependentvariable[26].The calculated exponents were1.14(force magnitude estimation),1.70(force magnitudeproduction),0.91(angle magnitude estimation),and0.96(angle magnitude production).The median data,and lines of bestfit from all sub-jects,are shown in Figs8,9,10,and11for forceestimation,force production,angle estimation,andFig.9Rate of growth of apparent force using magni-angle production respectively and are compared intude production.Data from12subjectsFig.12.The Spearman rank order correlation coefficientsr between the physical magnitudes and the per-ceived magnitudes were0.89for force magnitudeestimation,0.65for force magnitude production,0.89for angle magnitude estimation,and0.87for anglemagnitude production.All correlations were signifi-cant(p<0.01;N=132),indicating high correlationsbetween stimuli and the estimated or assignedmagnitude.3.3.3DiscussionWith magnitude estimation,the rank order of allmedian estimates of force and angle increased withFig.10Rate of growth of apparent angle using magni-tude estimation.Data from12subjectsincreasing force and angle,except for the middle(100and120)force estimates.This deviation is assumedto have arisen by chance.To assess the impact thatthis deviation has on the exponent obtained fromthe median data,an exponent was regressed toall data points from all subjects.This yielded anexponent of1.14,which is the same as the exponentdetermined from the median data.Similarly,withmagnitude production,the median forces and anglesincreased with increasing required value,except forthe two lowest forces.The lowest median force was Fig.8Rate of growth of apparent force using magni-tude estimation.Data from12subjects produced when subjects were asked to produce a。
autel 智能汽车ats100 gps用户手册说明书

ATS100 (With GPS) Intelligent Turn Assist System User ManualAutel Intelligent Automobile Co., Ltd.TrademarksAutel®, MaxiSys TM, MaxiDAS®, MaxiScan®, MaxiTPMS®, MaxiVideo TM, MaxiRecorder TM, and MaxiCheck TM are trademarks of Autel Intelligent Technology Corp., Ltd., registered in China, the United States, and other countries. All other marks are trademarks or registered trademarks of their respective holders.Copyright InformationNo part of this manual may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise without the prior written permission of Autel Intelligent Automobile Co., Ltd.Disclaimer of Warranties and Limitation of LiabilitiesAll information, specifications and illustrations in this manual are based on the latest information available at the time of printing.Autel Intelligent Automobile Co., Ltd. will not be liable for any direct, special, incidental, or indirect damages, or for any economic consequential damages (including lost profits) as a result of using the product.IMPORTANTBefore operating or maintaining this unit, please read this manual carefully, paying extra attention to the safety warnings and precautions.For Services and SupportWeb: Email: *********************Hotline: 0086-755-2267-2493 (China HQ) / 1-855-AUTEL-US (288-3587) (North America) / 0049 (0) 6103-2000520 (Europe) /+045 5948465 (APAC) / +971 585 002709 (IMEA)For technical assistance in all other markets, please contact your local distributor.This product holds the approval of German ABE for Abbiegeassistent. Any modifications to the product will result to an automatic cancelation of this approval. The user is also obliged to observe the product in accordance to it’s legal requirement.Table of Contents1.ATS100 Turn Assist System Introduction (1)1.1ASR100 Radar Introduction (2)1.2Warning Display (3)1.3GPS&IMU Module (6)1.4System Connections & Wire Harness Description (7)er Guide (10)2.1 Radar Installation (10)2.2 Radar Wiring (13)2.3 Input Signal Access (14)2.4 Power Access (15)2.5 GPS&IMU Module Installation (15)2.6 Display Screen Installation (16)1.ATS100 Turn Assist System IntroductionATS100 is a turn assist system with accurate target detection and warnings for vehicle blind spots. The system components are as followes: a millimeter-wave radar with operation frequency 76-77GHz and max RF output power 12dbm, a spirit level, a mounting bracket (optional), a warning screen, a GPS&IMU module and the cable. The millimeter-wave radar can accurately measure the target distance, speed, angle, and other information through the difference in echoes between the transmitting and receiving electromagnetic waves. It is an all-weather and all-day operational turn assist system with working temperature from -40℃-85℃. The warning screen warns the driver of a dangerous target in the blind spot and reminds the driver to make timely adjustments to the driving trajectory, to avoid accidents.The ATS100 turn assist system covers 180° on one side, ensuring no blind spots, with target detection range up to 80 x 4.5 m. With a compact structure, it comes with collision pre-determination and graded alarm function, can integrate with external CAN (Controller Area Network) and CAN FD (Flexible Data) interfaces, and supports 12 V or 24 V supply voltage.Figure 1-1 ASR100 radar coverageWarning targets of ATS100 turn assist system include:∙Dynamic vulnerable road users, moving at speeds greater than 3 km/h, including pedestrians, bicycles, electric bicycles, etc.∙Dynamic cars, moving at speeds greater than 10 km/h.Note: The safe use distance of the system needs to be greater than 4cm.1.1ASR100 Radar IntroductionThe ASR100 77 GHz Millimeter-Wave Radar is a compact, rugged radar sensor designed and manufactured by Autel Intelligence Vehicle® in China for side blind zone warnings for heavy trucks/buses, etc. The ASR100 meets automotive grade standard for professional commercial vehicles and has an IP69K rating, in line with the commercial vehicle use environment.Figure 1-2 ASR100 dimensions1.2Warning DisplayThe ATS100 turn assist system employs a precision sensing system to predict future collision probability with the target and provides users with dynamic sensing and display-based intelligent warnings, to remind drivers to take preventative measures in time to reduce the possibility of accidents. The warning display screen supports adaptive brightness control, enabling the screen’s brightness to adjust based on the brightness of the surrounding environment, thereby reducing eye-fatigue for drivers during the night.Figure 1-3 Display sizeThe warning function is divided into three levels as follows: (Note: Prerequisites for enabling the warning function: the speed of the vehicle is <30km/h)●Level 1 warning: The steering wheel angle is less than 30°, , and the target entersthe warning range, then a section of warning light LEDs, displayed in Figure 1-4, light up.●Level 2 warning: The vehicle is turning to the right, the steering wheel angle isgreater than 30° or turn on the turn signal (when the turn signal is connected), and it is expected that the vehicle and the target will collide within a certain amount of time, then a section of warning light LEDs start flashing.●Level 3 warning: The vehicle is turning to the right, the steering wheel angle isgreater than 30° or turn on the turn signal (when the turn signal is connected), and the vehicle and the target collision is imminent within a short amount of time, then the warning light will start flashing and a warning sound is generated.The driver can get the approximate location of the target based on the section of warning light LEDs that are on or are flashing.The detailed description of each warning light on the display is as follows:Figure 1-4 Description of warning light①Warning module power and status indicator: lights up when the status of the warning module is normal.②Brake indicator: This light flashes when actively braking. (Currently this function is not available).③GPS fault indicator: on when GPS sensor has no signal (temporary), flashing when GPS sensor has faulty signal.④Warning light: provides early warning of dangerous targets. The warning area is divided into three different priorities: Zone top (2-5 m in front of the front of the vehicle), Zone central (2 m in front of the front of the vehicle- 7 m behind the front of the vehicle), and Zone bottom (7-30 m behind the front of the vehicle), If there are multiple targets in Zone top, central or bottom at the same time, give priority to Zone central, then Zone bottom, and then Zone top.⑤Vehicle model: for reference; is in a steady on state after power on.⑥Radar status indicator: steady on state indicates a temporary radar failure, usually caused by factors such as radar being blocked, bad weather conditions; flashing indicates a permanent radar failure, requiring professional repair.⑦System fault indicator: The indicator light is on when there is a fault in the entire system.1.3GPS&IMU ModuleThis module integrates high-precision gyroscope, accelerometer, GPS module, adopts high-performance microprocessor and advanced dynamic solution and Kalman dynamic filter algorithm, which can quickly solve the current real-time motion attitude of the module. Using advanced digital filtering technology can effectively reduce measurement noise and improve measurement accuracy. The module integrates an attitude solver and cooperates with the dynamic Kalman filter algorithm to accurately output the current attitude of the module in a dynamic environment. The attitude measurement accuracy is 0.05 degrees static and 0.1 degrees dynamic, with extremely high stability and performance even better than some professional inclinometer.1.4System Connections & Wire Harness DescriptionConnect each port of the radar, display, GPS&IMU module wiring harness as shown below.Figure 1-5 System connections diagramRadar Harness DescriptionIn the figure below, the P1 connector is connected to the radar; it has 8 pins and the pin order is shown as below. The pin number in the figure corresponds to the pin definition in Table 1-2. The P2 connector is connected to the GPS&IMU module; it has 8 pins, and the pin number of P2 in the figure corresponds to the pin definition in Table 1-3. The P3 connector is connected to the vehicle and power supply, it has 6 pins, and the pin number of P3 in the figure corresponds to the pin definition in Table 1-4. The end of each cable has a printed label. Please check it carefully during installation. Do not turn the power on if the connectors are improperly connected.Figure 1-6 Radar wiring harness diagramRadar interface P1 definition table:GPS interface P2 definition table:Vehicle power interface P3 definition table:Display Harness DescriptionIn the figure below, the left P4 connector of the display harness is connected to the GPS module; it has 8 pins and the pin order is shown as below. The pin number in the figure corresponds to the pin definition in Table 1-5.Figure 1-7 Dispaly wiring harness diagramGPS interface P4 definition table:Table 1-5 Definition of GPS interface P4er Guide2.1 Radar InstallationNotes on Installation∙The radar should be installed on a component with little vibration. Strong vibration will negatively affect its detection function.∙The radar should be installed on the most protruding plane on the side of the truck to prevent it from being blocked by other parts and its detection performance from being compromised.Installation position: The radar should be installed on the right side of the truck. For right rudder country please install on the left side of the truck. We recommend you install it on the side guard plate, side guard rail of the truck.Figure 2-1 Radar installation position diagramInstallation range:When the radar is used, the reference coordinate origin is the center of the rear axle of the vehicle. The default installation position parameters of the radar are shown in Table 2-1 which only suitable for vehicles with a wheelbase of about 3.5-5m.Lateral distance X: the longitudinal distance of the radar installation position relative to the center of the rear axle of the vehicle;Longitudinal distance Y: The lateral distance of the radar installation position relative to the center of the rear axle of the vehicle;Installation angle: the rotation angle of the radar installation position relative to the center of the rear axle of the vehicle;Warn_dx: the distance from the center of the rear axle to the front edge of the vehicle.Trailer lengthFigure 2-2 Radar installation location calibration parameters diagramRecommended sensor location is shown in Figure 2-2 below. The radar can be installed at a distance of 230-430cm back from the front edge of the vehicle and a height of 30-120cm from the ground.Figure 2-3 Recommended installation location diagramIf your vehicle’s wheelbase is not within 3.5-5 meters, using the above default radar installation position parameters will cause excessive errors. At this time, the user needs to measure the distance between the actual installation position of the radar and the center of the rear axle of the vehicle to calibrate the installation position of the radar. For the calibration of the radar installation position, please use our customer's host computer AutelRadarCfgTools. The operation steps are shown in Figure 2-4 below:(1) Click the Open button to open the CAN device;(2) Click the Close button to close the CAN device;(3) Select the baud rate of channel 2, the current default value is 250K(4) Click the Start button to open channel 2;(5) Click the Stop button to close channel 2;(6) Select whether the Install Position is facing the left or right side of the front of the vehicle;(7) Enter dx, dy, theta and warn_dx values.dx: the longitudinal distance of the radar installation position relative to the center of the rear axle of the vehicle. Unit: meter;dy: The lateral distance of the radar installation position relative to the center of the rear axle of the vehicle, generally 1.25 m.Installation angle: the left side is -90°, right side is 90°Warn_dx: the distance from the center of the rear axle to the front edge of the vehicle. Unit: meter.Figure 2-4 AutelRadarCfgTools Interface IconInstallation deviations: To ensure detection accuracy, the radar installation horizontal angle error should be at best within ±1°. Installation vertical angle error should be t best within 2°.Figure 2-5 Radar installation deviations diagramExample of InstallationIn order to control installation deviations, an optional auxiliary mounting bracket can be used to adjust the direction and angle during installation.1. With the front of the radar (the side with the plastic casing) facing the detection area, fix the radar to the mounting bracket using the screws.2. Place the spirit level in the middle of the upper plane of the radar and adjust the mounting position adjustment screw until the bubble overlaps the ring in the middle.3. Secure the mounting position adjustment screw, and then connect the cable.Figure 2-6 Radar installation and calibration diagram2.2 Radar WiringInstallation Vertical Angle 30-120cmAfter the radar cable is connected to the radar, it should be routed into the cab together with the chassis cable, as shown in the image below.The entry for the chassis cable into the cab is at the bottom of the cab. Therefore, you need to lift the cab during wiring, as shown in the image below.In front of the front passenger seat (where the main fuse and the main ECU are located), connect the power supply, the display screen and the other parts of this product, as shown in the image below.2.3 Input Signal AccessThe Autel ATS100 requires the 5 interior signals below for its normal operation. The radar automatically reads these CAN J1939 signals by default, The baud rate is 250KB:1.Vehicle speed2.Steering wheel angle3.Yaw rate4.Longitudinal acceleration2.4 Power AccessThe radar has to be powered via KL15 or Clamp 15 (24V). We recommend you find KL15 on the main fuse board and connect the radar to it.2.5 GPS&IMU module InstallationThe GPS/IMU Module can be placed anywhere inside the driver cabin, the preferred position is behind the windshield glass and somewhere in the middle of cockpit.a. Place the GPS&IMU module horizontally, and note that the X-axis direction is consistent with the vehicle's forward direction.b. The module can be fixed using screws or double-sided tape.c. Connect the two wire harnesses at the end of the GPS&IMU module to the radar and display respectively.Note: GPS&IMU module installation angle tolerance<30°2.6 Display Screen Installationa. Remove the A-pillar cover and drill holes: Referring to Figure 1, take the mounting holes on the bracket back plate as reference points, and drill two 4.5 mm mounting holes and one 12 mm hole to route the cable through (30-40 mm below the mounting holes).b. Referring to Figure 2, use two M4*14 screws to fix the bracket back plate to the A-pillar cover.Note: 3M adhesive on the bracket back plate allows the bracket to be stuck on the A-pillar cover.c. Referring to Figure 3, route the cable on the screen assembly through the cable hole on the A-pillar cover.d. Referring to Figure 4, place the screen assembly on the corresponding position on the bracket back plate, as shown in view V and view VI. You can rotate the screen around the axis to adjust its angle, and then fix the screen assembly with M4*14 screws.e. Install the cover back to the A-pillar.17。
汽车英语

前驱动汽车factor of weight utilizaton汽车型谱chart of automotive model后驱动汽车rear drive automobile前驱动汽车front drive automobile发动机后置式客车bus with rear engine四轮驱动车辆all wheel drive automobile发动机前置式客车bus with front engine发动机底置式客车bus with underfloor engine计算机辅助设计computer aided deisgn(CAD)有限寿命设计design for finite life累积疲劳损伤原理theory of cumulative damage in fatique优化设计optimum deisgn汽车尺寸控制图sketch on layout ofr dimenshion s control of assembly 汽车总装配图automobile assembly drawing汽车总布置草图sketch for automobile layout汽车设计的技术经济分析technical -economic analysis in automobile design设计任务书design assignment系列化、通用化、标准化seriation ,universalization and standardization总布置设计calculation for layout运动校核correction of motion侧视轮廓side outline前视轮廓end outline顶视轮廓plan outline车长vehicle length车宽vehicle width车高vehicle height轴距wheel base轮距track前轮距track front后轮距track rear双胎间距space between twin wheels前悬front overhang后悬rear overhang离地间隙ground clearance纵向通过角ramp angle接近角approach angle离出角departure angle车架高度height of chassis above ground驾驶室后车架最大可用长度maximum usable length of chassis behind cab车身长度body work length车厢内部最大尺寸maximum internal dimension of body货厢内长loading space length货厢有效长度loading length货厢内宽loading space width货厢有效内宽loading width货厢内高loading space height货厢有效内高loading height货台高度loading surface height车架自由长度frame free length栏板内高inside board hegiht货厢容积loading surface门高door height门宽door width车架有效长度chassis frame useful length货厢全长body length牵引杆长drawbar length牵引装置的位置position of towing attachment牵引装置的悬伸overhang of towing atachment牵引装置的高度heigth of towing attachment牵引装置牵距distance of towing attachment牵引座前置距fifth wheel lead长度计算用牵引座前置距fifth wheel lead for calculation of length质量分配用牵引座前置距fith wheel lead for calculation of mass distribution牵引座结合面高度height of coupling face牵引装置至车辆前端的距离distance between towing device and front end of towing vehicle 牵引*销至车辆前端的距离distance between jaw and front end of towing vehicle半挂车间隙半径rear tractor clearance radius of semi-trailer半挂车前回转半径front fitting radius of semi trailer车轮垂直行程vertical clearance of wheel车轮提升高度lift of wheel转弯半径turning circle静止半径static radius碰撞collision (crash,impact)正碰撞frontal collision (frontal impact)侧碰撞side collision (side impact)后碰撞rear collision (rear impact)擦碰撞sidewipe collision碰撞方向collision direction碰撞角度collision angle倾斜的oblique(tilt)成角度的angled纵向的longitudinal垂直的perpendicular对中centered偏置offset重叠overlap碰撞轴线排列collision axis alignment纯正撞pure frontal impact碰撞位置impact location碰撞角度impact angle主要力principal force主要力方向direction of principal force(PDOF)交通事故traffic accident事故原因accident cause单原因事故single event accident多原因事故multiple event accident单车事故single vehicle accident多车事故multi vehicle accident死亡和重伤事故fatal and seevere accidenet折头jack-knife翻车rollover火灾fire驶离道路run off the roadway变形deformation撞车地点crash site试验场proving ground试验场地testing site撞车模拟装置crash simulation test set-up汽车模拟碰撞滑车试验装置auto crash simulation test sled 壁障barrier胶合板plywood五轮仪法fifth wheel method第五轮仪fifth wheel method光电屏障photoelectric barrier发射器transmitter接受器receiver传感器sensor振荡器oscillator数字计时器digital chronometer电磁束栏障eelctromagnetic beam barrier单轴加速度计uniaxial accelerometer三轴加速度计triaxial accelerometer速度测量典型方法typical methods of velocity measurement 多普勒效应法doppler effect method运动波wave in motion视在频率apparent frequency发射波频率emitted frequency环境介质ambient medium电磁波electromagnetic vaves超短波(厘米波)centimetric waves微波micrometirc waves激光laser模拟/数字(A/D)转换器analog/digital converter(A/D converter) 模拟磁带记录器analogue magnetic recorder数字式磁带记录器digital magnetic recorder纸带记录器paper tape recorder数据处理data processing滤波filtering数字化digitalisation取样频率sampling frequencies幅值分辨率amplitude resolution光学数据通道optical data channel失真指数distortion index分析系统analysis system扫描时基系统time-base ssytem显象率imaging rate试验标靶test target电影摄影法cinematographic procedure高速电影摄影high speed cinematorgrphy高速摄影机high speed camera胶片分析仪film analysis system胶片颗粒grain of the film摄影机camera长焦距镜头long focal lengh lenses摄像标志photographic marks车载摄像机on-board camera假人dummy混合型假人hybrid dummy仿真度biofidelityHyge滑车架hyge sled fixture滑车sled座椅deceleration sled刚性座椅rigid seat座椅调节器seat adjuster上部躯体upper torso骨盆pelvis臀部hip带约束系统belt restraint ssytem斜挎肩带shoulder belt (diagonal belt)腰带lap belt状带harness belt水平胸带horizontal chest belt三点式安全带three-point belt座椅安全带seat belt液力吸能装置hydraulic energy absorber前后轴anterior -posterior axis头部重心加速度head C.G.acceleration头部重心运动轨迹headc.G. Trajectory头部旋转head rotation头部扭曲headflexion头部扭转head twist头部伤害指数head injury criteria (HIC)生物力学响应biomechanical response颈部侧弯试验lateral neck bending test高G值尸体试验high G-level cadaver test初始速度rate of onset包容线envelop尸体下落试验cadaver drop test尸体滑车试验cadaver sled test尸体碰撞试验cadaver impact test坚硬表面rigid surface缓冲表面padded surface冲量impulseSAE100和180滤波通道SAE channel class 100 and 180 filter 摆式碰撞器pendulum impactor频率级通道channel frequency classes充气约束系统inflatable restraint system(IRS)辅助充气约束系统supplemental inflatable restraint(SIR)辅助约束系统supplemental restraint system(SRS)空气垫约束系统air cushion restraint system(ACRS)气囊airbag碰撞传感器crash sensor电子碰撞传感器electronic crash sensor主传感器primary sensor安全传感器safety sensor二级传感器secondary sensor临界点threshold电子器件eelctronic pieces电容器capacitor诊断组件diagnostic module准备就绪指示器readiness indicator存储器recorder短路夹shorting clip警告指示器warning indicator气体发生器总成inflator assembly点火系inflator assembly助燃剂/增强剂booster /enhancer点火器igniter引爆剂ignition material引爆器initiator电爆管squib导火索transfer cord气体发生剂gas generant冷却剂coolant药片pellet(pill,tablet)金属件metal piece金属盒canister /catridge增压器diffuser (inflator)过滤器总成filter assembly屏蔽室screen chamber组件总成module assembly囊bag囊加强带bag tethers垫cushion内罩inner cover膝气囊knee bag保护罩/外罩protective cover/outer cover胸气囊torso bag多孔性porosity排气孔vent膝垫knee bolster膝挡板knee bar膝缓冲器knee bumper试验方法test method老化试验aging test火烧试验bonfire test爆破试验burst test坠落试验drop test电磁干扰试验electromagnetic interference 环境模拟试验environmental simulation test 气体成分试验gas composition test湿度试验humidity test微粒成分检验particulate compostion test箱内试验tank test温度负荷试验temperature load test视野vision field (visibility)眼椭圆eyellipse驾驶员视野范围vision field of driver视线sight line眼椭圆样板eyellipse template眼椭圆中心eyellipse center眼椭圆定位线eyellipse locating line坐标系coordination system(axissystem)视觉vision视平面sight plane视野vision field直接视野direct vesion field间接视野indirect vision field单眼视野monocular vision field双眼视野binocular vision field两单眼视野ambinocular vision field周边视野peripheral vision field双眼障碍binocular obstructionA立柱A-pillar座椅基准点seating reference point (SgRP)有效瞳孔距effective interpupillary width视野原点original points of vision field颈部转动中心点(P点)neck pivot point (P point)仪表参考平面reference plane of instrument panel显示表面display surface转向盘轮缘盲区steering wheel rim obstruction转向盘毂及辐条盲区steering hub and spoke obstruction 派生V点和P点developing V points and P points汽车视野障碍vehicle visural obstruction视点(V点)vision point ( V points)眼点(E点)eye point (E point0眼睛投影点projected eye point上视角upward angle of visibility下视角downwards angle of visibility电磁环境electromagnetic environment电磁环境兼容性electromagnetic compatibility(EMC)电磁敏感度electromagnetic susceptibility(EMS)电磁干扰electromagnetic interference电磁骚扰(现象)electromagnetic distrubance(电磁)发射(eelctromagnetic )emission窄带(电磁)发射narrowband emission宽带(电磁)发射broadband emission带外发射out of band emission电磁辐射electromagnetic radiation横向电磁波模式transverse electromagnetic (TEM)mode 干扰源distrubance source信号源signal source无用信号undesired signal干扰信号interfering signal无线电环境radio environment射频骚扰radio environment射频干扰radio frequency interference(RFI)系统间干扰inter-system interference系统内干扰intra-system interference电磁噪声electromagnetic environment射频噪声radio frequency noise自然噪声natural noise人为噪声man-made noise随机噪声random noise静电放电electrostatic discharge(ESD)脉冲pulse冲激脉冲impulse尖峰脉冲spike群脉冲burst of pulses脉冲噪声impulsive noise脉冲骚扰impulsive distrubance脉动pulsating基波(分量)fundamental (component)谐波(分量)harmonic (component)电源骚扰mains-borne distrubance磁场field均质磁场homogenous field磁场强度field strength敏感度阈值susceptibility thresholds电流注入bulk current injection (BCI)无线电干扰抑制radio interference suppression 骚扰抑制distrubance suppression骚扰场强disturbance field strength骚扰功率distrubance power抗扰性immunity to a distrubance抗扰度immunity level电源抗扰性mains immunity外部抗扰性external immunity抗扰性电平immunity level抗绕性裕量immunity margin藕合路径coupling path地藕合干扰earth-coupled interference频率响应frequency response频率级规格frequency step sizes调幅amplitude modulation (AM)正弦波调幅sine-wave amplitude modulation甚高频very high frequency (VHF)超高频ultra-high frequency (UHF)无调谐no-modulation (CW)交调crossmodulation互调intermodulation中频抑制比intermediate frequency rejection ratio镜频抑制比image rejection ratio电压驻波voltage standing wave(VSW)电压驻波比voltage standing wave ratio(VSWR)脉冲极性pulse polarity性能降低degradation of performance灵敏度降低desensitization抗扰性试验immunity test试验强度级test severity level功效性能状况分类function performance status classificaton (FPSC) 开阔试验场地open area test site(OA TS)吸波室absorber lined chamber屏蔽室shielded chamber隔音室anechoicchamber横向电磁波室transverse electromagnetic cell小型诊断室compact diagnostic chamber屏蔽门shielded gate反射屏蔽。
基于 EKF 轮胎侧向力估计的 AFS 和 EPS 集成控制
基于 EKF 轮胎侧向力估计的 AFS 和 EPS 集成控制周兵;徐蒙;范璐【摘要】In the integrated system of electric power steering (EPS )and active front steering (AFS ),the additional front wheel rotating angle generated by AFS gives rise to the change of tyre lateral force,it leads to the change of steering wheel torque finally.Although the tyre force is hard to be measured directly,it can be estimated using the extended Kalman filtering (EKF)algorithm.This method can solve the problem of steering wheel torque change.Here,a vehicle nonlinear mathematical model was presented and a nonlinear tyre lateral force estimator was also established based on EKF.The estimated tyre lateral force was used to compensate the abrupt change of steering wheel torque and to realize the combination of vehicle state estimation and vehicle control.The simulation analysis with MATLAB /Simulink verified the effectiveness of the proposed control strategy.%对融合了主动前轮转向的电动助力转向系统,主动转向引入的附加转角使得轮胎侧向力发生突变,从而导致转向盘力矩会发生突变。
基于运动学动力学方法融合的汽车质心侧偏角估计英文

ISSN 1674-8484 CN 11-5904/U汽车安全与节能学报, 2015年, 第6卷第1期J Automotive Safety and Energy, 2015, Vol. 6 No. 1Vehicle Sideslip Angle Estimation based on Fusion of Kinematics-Dynamics MethodsGAO Bolin 1,2, XIE Shugang 2, GONG Jinfeng 2(1. School of Mechanical Engineering, Tianjin University, Tianjin 300072, China;2. China Automotive Technology & Research Center, Tianjin 300300, China)Abstract: A novel method of vehicle sideslip angle estimation was proposed based on a fusion of kinematics and dynamics methods to improve the estimation accuracy. A sideslip angle fusion observer (SAFO) was constructed with three local filters to estimate lateral velocities sending preliminary output to a master filter. The master filter fuses the outputs from all local filters to calculate a global sideslip angle estimation result according to driving information and fusion rules. The results show that the SAFO has good estimation accuracy and stability in a long time running with good robust for sensor signal bias. Therefore, the vehicle test data verifies the SAFO performances.Keywords: vehicle safety; sideslip angle estimation; kinematics method; dynamics method; fusion observer;pseudo-integration基于运动学—动力学方法融合的汽车质心侧偏角估计(英文)高博麟1,2,谢书港2,龚进峰2(1. 天津大学机械工程学院,天津 300072,中国;2. 中国汽车技术研究中心,天津 300300,中国)摘 要: 为了提高汽车质心侧偏角估计的准确性,提出了一种新的、基于运动学—动力学方法的融合估计方法。
CONTINUOUS CORRECTION FOR STEERING WHEEL ANGLE OFF

专利名称:CONTINUOUS CORRECTION FOR STEERING WHEEL ANGLE OFFSET发明人:KLIER, Willy,VANDERLUGT, David申请号:EP11776634.5申请日:20111012公开号:EP2627525B1公开日:20150826专利内容由知识产权出版社提供摘要:A system and method of continuously updating a steering wheel angle offset value to adapt to changing road conditions. A vehicle control system receives a plurality of vehicle parameter values each from a different vehicle sensor. The system then calculates a plurality of observed steering angle values, each using a different calculation method based on one or more of the plurality of vehicle parameter values. The plurality of observed steering angle values are then used to calculate a vehicle steering angle. A steering wheel angle offset value is then calculated based on the steering wheel angle and the calculated vehicle steering angle. The steering wheel angle offset value and the steering wheel angle are used to control the vehicle's steering system.申请人:BOSCH GMBH ROBERT地址:DE国籍:DE代理机构:DREISS Patentanwälte PartG mbB更多信息请下载全文后查看。
民航英语词汇(Englishvocabularyforcivilaviation)

民航英语词汇(English vocabulary for civil aviation)空调系统(空调系统)包空调主件热引气热引气出口管道外流管旁通阀旁通活门冲压空气冲压空气风口进气口调节空气配平空气阀包流量开关空调主件流量风扇排气风扇有保护盖的导片保护皮瓣隔离阀隔离活门“光”的自动定位”灯灭”自动状态风机鼓风机排风扇排风扇落水机外车载机上开路开路闭路闭路配置形态客座乘客载荷下游下游站在水积水备份ATLN(交替)通道通道气动气源双双的切换交换pre-cooler预冷机冷却液冷却剂琥珀琥珀色通风通风断路器跳开关加压(增压)挡板阀瓣状活门简介剖面切换扳钮开关真空真空高气压等压气压气压压差压差气压开关膜盒气压备用(备用)备份直流直流直流电PSI(磅每平方英寸)磅/平方英尺沟水上迫降增压器增压器无意偶然的泄漏漏、渗围裙停机坪吸顶板货运货机附件副件油门杆油门杆巡航巡航消极的安全阀负压释放活门正压正压机场标高机场标高自动驾驶仪(自动驾驶)动量动量模仿模仿glare-shield遮光板执行器制动器监控监视轨迹轨迹象限油门操纵杆弹性(柔性)灵活的MCT(最大持续推力)最大连续推力电梯升降舵副翼副翼助航助航SID(标准仪表离场)标准仪表离场明星(标准终端到达路线)标准进场程序错过的方式(去)复飞动态动力的增强增加、增益飞行包线飞行包线基民盟(控制显示单元)控制显示组件FMA(飞行方式信号牌)飞行方式显示器大气数据惯性基准系统(大气数据惯性基准系统)大气数据及惯性基准系统MCP(控制面板)方式控制面板GPS(全球位置系统)全球定位系统火炬平飘接地点触地电传飞行电传操纵ACCELEROMETER acceleratorALIGNMENT alignment and calibrationSERVOMOTOR servo motorGYROSCOPE gyroscopeTHRUST, REDUCTION, ALT, thrust reduction heightREVERSE BacksteppingARM pre positionFPA (FLIGHT, PATH, ANGLE) flight path angleLOCALIZER headingIDLE trainDETENT cardFPV (FLIGHT, PATH, VECTOR) flight path vectorCRM (COCKPIT, RESOURCE, MANAGEMENT) cockpit resource managementPF (PILOT-FLIGHT) Co pilotPFD (PRIMARY, FLIGHT, DISPLAY) Master flight displayPULLEY ROLL running pulleySCROLL flip and roll upSLEW select page up and downVELOCITY speedDATA BASE LOADER database loaderALPHA/NUMERIC KEY BOARD Alphabet / numeric keyboardSCRATCH PAD draft barDYNAMIC, AND, BACKGROUD, DATA, dynamic and background data TROPOPAUSE tropopauseCYAN dark blueCOST INDEX cost indexALIGNMENT calibrationPROMPT promptEFOB (ESTIMATED, FUEL, ON, BOARD) expected fuel on board MAGENTA red, magentaEAT (ESTIMATED, TIME, OF, ARRIVING) estimated time of arrival ADC (AIR, DATA, COMPUTER) air data computerCRT (CATHODE, RAY, TUBE) cathode ray tubeBITE (BUILD-IN, TEST, EQUIPMENT) built-in test equipment DEFAULT absentLSK (LINE, SELECT, KAY) line selection keyASYMMETRIC asymmetryTERMINAL AREA terminal areaCOORDINATE latitude and longitudeRNVA AREA NAVIGATION regional navigationEN-ROUTE on the airwayCFDS (CENTRALIZED, FAULT, DISPLAY, SYSTEM) centralized display systemCOMMUNICATION (Communication)VIBRATIONS vibrationIMPULSES pulseANTENNA big lineMEGAHERTZ MHzCURVATURE bending curvatureIONOSPHERE ionosphereTRANSCEIVER radio transceiverRACK equipment rackSQUELCH squelchPASSENGER ADDRESS passenger radioCABIN INTEROHONE cabin talk INTERPHONE internal telephone set EVACUATION evacuationROTARY rotatingKNOB knobDEDICATED dedicatedBUZZER beepsBOOM SET suspender earphoneHEAD SET headsetSELCAL select callACTIVE is in useHOT MIKEPRESS TO TALK (PTT) press the speaker LATCHED lockPREEMPT preferred possessionSTUCK blockingPLUG insertionSTRAIN strainerSHIELD filteringROCK SWITCH rock switch FLIGHT CONTROL SYSTEM (I) (flight control (1)) REJECTED T/O abort takeoff CONVENTIONAL universal WHEEL steering wheel COLUMN joystickPEDAL pedalSURFACE rudder surface RUDDER rudderSPEED-BRAKE speed reducer FLAP flapSTAB TRIM tabOVERRIDE SWITCH override switchYAW DAMPER yaw damperCENTERING MECHANISM centering machine 后掠后掠扰流板扰流板果酱卡阻卷滚转(横滚)沥青俯仰安定面稳定剂偏航偏航偏航率陀螺仪偏航率陀螺仪纵轴纵轴垂直轴垂轴横向横轴作动筒作动筒中立位流线型位置陷入自旋进入螺旋翼型翼部面飞行控制系统(II)(飞行控制(二))辅助飞行控制辅助飞行操纵高升力装置增升装置后缘(TE)后缘前缘(LE)前缘动力传输单元(PTU)动力传输装置失速失速机动机动飞行内侧内侧ourboard外侧开槽开缝的三开缝襟翼三开缝襟翼拖阻力比较器比较仪滚转率滚转率搅拌机混合器偏转偏转平均空气动力弦平均空气动力弦扭矩扭力杰克千斤顶消防(一)(防火(一))消防防火过热超温火灾探测探火火警探测环路探火环火灾报警火警戒故障监测电路失效监控电路警钟火警铃接近地面的近地发动机指示和机组告警系统(EICAS)发动机指示和机组警戒系统cathode-ray-tube阴极射线管发动机短舱发动机舱货舱货舱热开关热电门continuous-loop连续环路双金属双金属的陶瓷芯陶瓷芯因康镍合金管因科镍合金管陶瓷微珠陶瓷珠共晶盐易熔盐故障失效烟雾检测烟雾探测爆竹爆炸帽(防火(二))锁定下锁无意疏忽大意关机关车解锁开锁旅行跳开关推力反向器反推惰性气体剂惰冷气灭火剂冷氧化剂氧化剂二氧化碳(CO2)二氧化碳氮(N1)氮惰性气体惰气毒性毒性氟利昂氟利昂溶剂溶剂与......相溶兼容墨盒燃爆筒绝缘材料滞后浸泡浸、泡残留滤渣、残余物灭火剂灭火剂压力表压力表流形管道破裂破裂装饰饰面材料有害气体毒气电气系统(一)(电子系统(一))产生发电分布配电ESSENTIAL POWER important equipment power supplyVOLTAGE voltagePHASE phaseTRANSFORMER, RECTIFIER, UNIT (TRU) variable voltage rectifier BUS bus barLIGHTING CIRCUIT lighting circuitEMERGENCY POWER emergency power supplySTANDBY POWER standby power supplyONBOARD AirborneSTATIC INVERTER static converterBATTERY batteryRAM AIR-DRIVER GENERATOR ram air driven generatorNICKEL CADMIUM BATTERY Ni Cd batteryCONSTANT SPEED DRIVE (CSD) constant speed driveFREQUENCY frequencyINTEGRATED, DRIVE, GENERATOR (IDG) integrated drive generator The ENGINE-DRIVEN GENERATOR engine drives the generator BATTERY CHARGER battery chargerSWITCHED HOT BATTERY BUS conversion heat storage bus bar ELECTRICAL LOAD electric loadELECTRICAL SYSTEM (II)(electronic system (two))TRANSFER BUS conversion bus barTRANSFER RELAY conversion relayRESPECTIVE respectiveMOMENTARILY instantaneousONSIDE Ben sideLOAD load and chargeTRIP jumped OFFCHARGE chargingSERVICE BUS service busSPLIT BUS split bus barThe BUS TIE BREAKER (BTB) bus connects the circuit breakerGENERATOR CONTROL UNIT (GCU) engine control moduleMONITOR monitoringDIVISION allocationDIFFERENTIAL, PROTECTION, CURRENT, TRANSFORMERS (DPCTs) differential voltage protection current transformerOPEN disconnectSHORT short circuitSYNCHRONOUS BUS synchronous bus barFUEL (fuel)INNER FUEL TANK inner fuel tankINTEGRAL TANK integral fuel tankWING/FUSELAGE STRUCTURE wing / fuselage structureWING TIP tipsFUEL NOZZLE fuel nozzleCIRCULATE cycleVENT SURGE TANK ventilation (shockproof) tankSPILLAGE overflowCROSS-LINE horizontal lineDIVERT steeringGROSS, WEIGHT (GW) full weightREFUEL ACCESS DOOR fuel tank cover plateREFUEL COUPLING DOOR filler capSHROUD DRAIN MAST discharge pipe coverE/WD, ENGINE, AND, WARNING, DISPLAY engine warning instructionsSPOUT jetINJECT jetCROSS FEED VALVE delivery valveSUCTION VALVE siphon valveCONDENSATION, OF, MOISTURE, condensation of water vapor SEDIMENT sedimentRUPTURE ruptureOVERFLOW DRAIN overflowREPLENISH come on!REFUEL PANEL ACCESS DOOR fuel panel cover plate SINGLE REFILLING POINT single point fillerREFUEL COUPLING DOOR gas cap connectionSURGE TANK vent tankMAGNETIC FUEL LEVEL INDICATOR magnetic tapesFLUSH Qi PingDRAIN VALVE drain valve and drain valve MAINTENANCE maintenance and repairFLOAT VALVE float valveFILLER CAP funnel mouthDUMP/JETTISON drainHYDRAULIC SYSTEM (hydraulic system) RESERVOIR hydraulic tank, reservoir FILTER filter, filter paper蓄电池储压器、储蓄器驱逐排出、赶出活塞活塞负责释放、放出车轮制动机轮刹车装置前轮转向前轮转向操纵主飞行控制面主飞行操纵面压力调节器调压器应急泵急救泵止回阀单向活门选择阀选择活门卸荷活门驱动阀预定值预定的阀球阀球形活门回归线回油管路弹簧压力弹簧压力立竖管冰和雨(冰和雨)驱蚊防护剂喷雾喷、向......喷射穿孔于穿孔热防冰系统热防冰系统饮用水管道饮用水线挡风玻璃风挡发动机罩发动机整流罩雨刮刮水器静态端口静压口AOA(的攻击角度)迎角TAT(空气温度)全温坐(静态空气温度)静温乙烯核心乙烯树脂内芯玻璃玻璃窗格bird-strike鸟击导电涂料导电涂层亚克力面板丙烯酸树脂气流角度传感器气流角度传感器延迟电路延迟电路电磁阀电磁活门sighr计目视测量表注意假说提醒灯计时记时器经过时间的已飞时间参数参数清单检查单不省略un-clutter混乱UTC(通用协调时间)协调世界时图解形式示意图每个电子姿态指示器水平状态指示器EHSI符号geneerator符号发生器电弧模式弧型模式增长模式罗盘模式指针方位指针轴承决断高度决定高度ADF(自动测向仪)自动定向机glide-slope下滑道偏差偏差侧滑侧滑接口界面、接口、连接模拟模拟DFDR(数字式飞行数据记录器)数字式飞行数据记录器水下定位信标水下信标机离散信号离散信号滑球球形侧滑仪横杆十字指令杆秒表记时方式秒表(跑表)记时方式横滚标志卷索引把重叠参考线参考线速度趋势箭头速度趋势箭头真正的北方真北原始数据原始数据航向标线准线偏离杆偏差吧当然航道指针指针毕业刻度远程分装双箭头双线箭头指针(双针)灰色模拟海拔带灰色模拟高度标尺带前coourse匕首向台航道箭形符号艾滋病飞机集成数据系统ECAM(电子中央飞机监控)电子飞机集中监控概要概要定位定向缩进缩进离散输入信号离散的输入信号最低设备清单(MEL)最低设备清单起落架(起落架)接地回路打地转在拿大顶鼻子缘斜度挡轮挡蹦极弹簧索(减震支柱)铝合金铝合金减震器减震器、缓冲器橡胶块橡皮块(减震器)油气杆油气式减震支柱后三点式起落架轮齿轮三轮车齿轮前三点式起落架防滑防滑装置减震支柱减震支柱上位锁钩上位锁钩(起落架的)交替延伸(起落架)备用放出执行器致动器、动作筒伪(接近开关的电子装置)接近电门电子组件链接扭力臂扭转卡车装配轮架组件固定链接轴颈连杆TILLER操纵杆前轮转向前轮转向操纵推力反向器反推装置梭阀往复活门down-lock链接下锁连杆倾斜倾斜定中凸轮定心凸轮over-centering过中轴承轴承碳刹车碳素钢刹车导航(一)露点露点噪音减噪VOR(very-high-freguency omini-directional范围)甚高频全向信标VOR方位VOR定向、定位大气数据惯性基准单元(ADIRU)大气数据惯性基准组件数字距离无线电磁指示器(ddrmi)数字距离无线电磁指示器GPWS(近地警告系统)近地警告系统阈值跑道入口ADF(自动测向仪)自动定向仪DME(测距仪)测距仪piloyage地标领航AGL(地面以上)离地高度PFV(飞行路径向量)飞行航经引导激光陀螺激光陀螺灯塔信标台导航(二)导航(二)三环类抗抑郁药(交通防撞系统)空中交通避撞系统锁定旋钮锁定旋钮近危险接近小姐ATA(美国航空运输协会)美国航空协会阈值入口、标准APU(辅助动力装置)(辅助动力装置)表表电路电路、一圈放电放电关机关车维护维护、维修over-speed超速负载负荷门进口门TUCK make...... hidePLENUM gas collecting chamberINDUCTION SYSTEM intake systemINCIPIENT earlyVARIABLE, INLET, GUIDE, VANES adjustable intake guide NOMINAL ratedINSTRUMENT FLIGHT instrument flightPHASE stageDEPARTURE departureENROUTE routeARRICAL approachTRANSITION transitionPROCEDURE programINSTRUMENT APPROACH instrument approachSID (STANDARD, INSTRUMENT, DEPARTURE) standard instrument departureSTAR (STANDARD, TERMINAL, ARRIVAL, ROUTE) standard approach routesCHART LAYOUT chart layoutSYMBOLOGY symbolFACILITY facilitiesCOMMUNICATION FREQUENCY communication frequencyMSA (MINIMUM, SAFE, ALTITUDE) minimum safe altitudePLAN VIEW planNAVIAID navigation and navigationMORSE CODE Morse codePROCEDURE TURN program turnOUTBOUND backsHOLDING waitHEADING headingRADIAL radial lineMISSED APPROACH re flightMOCA minimum barrier heightMAP re flight pointMSA minimum safe altitudeLDA available landing distanceMLS microwave landing systemSDF simple directional facility PAR initial approach radarMSL mean sea levelTEARDROP PATTERN correction angle HAT higher than the grounding point HAA is higher than the airport MEA minimum fairway heightRVR runway visual rangeCLIMB (Pa Sheng)ROTATE lifting wheelSTICK SHAKER shake leverBUFFET engine buffetingOVERSHOOT is visually too highFUEL PRUDENT oil savingOROGRAPHIC TURBULENCE airflow in mountain form PENALTY DRAG resistance increasesCB ACTIVITYDRAG cumulusCONCEDE A REROUTE A offers a new routeThe optimum height of OPTIMUM ALTITUDE。
基于非水平位移的激光跟踪仪测角误差标定方法

基于非水平位移的激光跟踪仪测角误差标定方法+李辉,伍嘉豪,赵伟康,马大智,周志龙,于斌超,刘巍(大连理工大学机械工程学院,辽宁大连116023)摘要:激光跟踪仪因测量范围大、精度高等优势被广泛应用于大型航空构件的大尺寸测量。
然而,随着测量范围的增大,其测量精度将受到测角误差的严重影响。
为了实现激光跟踪仪测角误差的准确评估,提出了一种基于非水平位移的激光跟踪仪测角误差标定方法。
以空间任意运动位移为约束,采用三坐标测量机与高精度位移台分别对空间任意位移的角度与长度进行高精求解,进而利用激光跟踪仪的干涉测长距离为约束,实现转角的有效表征,进而实现角度误差的高精标定。
通过实验室试验,实现了激光跟踪仪测角误差的有效标定。
关键词:测角误差;激光跟踪仪;角度标定;非水平位移;大尺寸测量中图分类号:TH744;TB922文献标志码:ACalibration Method of Angle Error of Laser Tracker based on Non-horizontal Displacement LI Hui,WU Jiahao,ZHAO Weikang,MA Dazhi,ZHOU Zhilong,YU Binchao,LIU Wei(College of Mechanical Engineering,Dalian University of Technology,Dalian116023,China) Abstract:Laser tracker was widely used in large-scale measurement of large aviation components due to its advantages oflargerangeandhighprecision However!withtheincreaseofmeasurementrange!the measurementaccuracy wasseri-ouslya f ectedbytheanglemeasurementerror Inordertorealizeaccurateevaluationofangleerror!acalibration methodof angleerroroflasertrackerbasedonnon-horizontaldisplacementwasproposed Theangleandlengthofarbitrarydisplace-mentinspaceweresolvedbythreecoordinatemeasuring machineandhighprecisiondisplacementplatformrespectivelywith theconstraintofarbitraryspatialmotiondisplacement Andthee f ectiverepresentationofanglewasrealizedbyusingthein-terferencemeasurementdistanceoflasertrackerasconstraint!thenthehigh-precisioncalibrationofangleerrorwas made Theexperimentalresultsshowedthattheangleerrorlasertrackerwascalibratede f ectivelyKey words:angle measurement error,laser tracker ,angle calibration ,non-horizontal displacement,large-scale measurement激光跟踪仪具有测量范围大、单点测量精度高等优点,被广泛应用于航空航天装备制造过程中的大尺寸几何测量&12'(随着大型构件尺寸与制造精度的极值化,测量精度和可靠性的要求愈发提高(为了有效评估几何量测量结果的可靠性,需要对测量仪器的系统误差进行评估激光跟踪仪为非正交测量系统,通过干涉测长与2个角度编码器的角度测量,实现了球坐标系下三维坐标的测量。
2018年特斯拉神秘的Focus说明书

FOCUS
SPECIFical 4-wheel independent suspension Anti-Lock Brake System (ABS) Electric power-assisted steering Torque Vectoring Control
38.0" 33.2" 52.8" 52.6"
Capacities (cu. ft.) Passenger volume Luggage capacity (sedan) Cargo volume behind front seats (hatchback)
Cargo volume behind rear seats (hatchback)
2.0L EcoBoost I-4 (high-output) 252 hp @ 5,500 rpm3 270 lb.-ft. of torque @ 2,500 rpm3 6-speed manual 22 city/30 hwy/25 combined mpg Standard: ST
2.3L EcoBoost I-4 Auto Start-Stop Technology 350 hp @ 6,000 rpm3 350 lb.-ft. of torque @ 3,200 rpm3 6-speed manual 19 city/25 hwy/22 combined mpg Standard: RS
Fuel tank (gal.)
90.0 13.2
43.9 (43.8 RS)
23.3 (19.9 RS)
12.4 (13.9 RS)
POWERTRAINS/EPA-ESTIMATED RATINGS2
楔形亲油轨道-超疏水复合图案化表面液滴引导及润滑增效研究

表面技术第52卷第11期楔形亲油轨道-超疏水复合图案化表面液滴引导及润滑增效研究陈佳伟,李晓莹,郭世理,张辉*(西安交通大学 现代设计及转子轴承系统教育部,西安 710049)摘要:目的实现液滴及润滑油在超疏水表面定向引导,并将其运用于机械摩擦副,改善摩擦润滑性能。
方法提出一种简单的超疏水高疏油涂层制备方法,即在硅烷耦合剂作用下利用1H,1H,2H,2H-全氟癸基三乙氧基硅烷(FAS-17)改性气相纳米二氧化硅,经交联固化处理后制得具有超疏水高疏油特性的涂层。
通过FT-IR分析涂层成分、SEM观测涂层形貌,验证了涂层制备方案的有效性。
通过纳秒激光在疏油涂层上加工亲油楔形图案化表面,进行表面流体引导实验。
通过开展球-盘标准摩擦实验和滚动轴承温升实验来验证楔形亲油图案化表面流体引导,用于实现机械摩擦润滑增效的有效性。
结果通过对涂层表面进行成分分析,验证了C-F键长链在二氧化硅粒子表面上的成功枝接。
通过对涂层表面进行形貌观测,验证了表面微纳米粗糙结构的成功构建。
所制备得到涂层表面去离子水、PAO4、石蜡油、白油、PAO6、齿轮油接触角分别为157°、142°、143°、144°、136°、145°。
相比之下,普通铝板表面去离子水、PAO4、石蜡油、白油、PAO6、齿轮油接触角分别为46°、16°、17°、20°、15°、24°,涂层具有优异的超疏水高疏油特性。
通过液滴引导实验,确定液滴引导的楔形最优参数(长度L=30 mm,间距d=0.3 mm、宽度W=0.9 mm),并且楔形亲油图案化表面能够实现液滴的曲线以及逆重力定向运输。
球-盘摩擦实验表明,楔形亲油图案化表面在不同工况下均可以有效降低摩擦因数,在低速重载条件下摩擦因数降低了16%。
轴承温升实验表明,在转速相同的情况下,带有楔形亲油图案化表面的轴承温升均明显低于普通轴承。
转向盘转动惯量测试研究
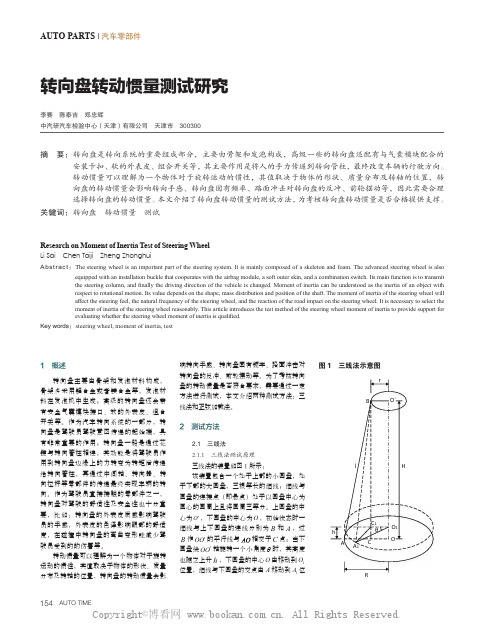
转向盘转动惯量测试研究李赛 陈泰吉 郑忠辉中汽研汽车检验中心(天津)有限公司 天津市 300300摘 要: 转向盘是转向系统的重要组成部分,主要由骨架和发泡构成,高级一些的转向盘还配有与气囊模块配合的安装卡扣、软的外表皮、组合开关等,其主要作用是将人的手力传递到转向管柱,最终改变车辆的行驶方向。
转动惯量可以理解为一个物体对于旋转运动的惯性,其值取决于物体的形状、质量分布及转轴的位置,转向盘的转动惯量会影响转向手感、转向盘固有频率、路面冲击对转向盘的反冲、前轮摆动等,因此需要合理选择转向盘的转动惯量。
本文介绍了转向盘转动惯量的测试方法,为考核转向盘转动惯量是否合格提供支撑。
关键词:转向盘 转动惯量 测试1 概述转向盘主要由骨架和发泡材料构成,骨架多采用铝合金或者镁合金等,发泡材料在发泡机中生成;高级的转向盘还会带有安全气囊模块接口、软的外表皮、组合开关等。
作为汽车转向系统的一部分,转向盘是驾驶员驾驶意图传递的起始端,具有非常重要的作用;转向盘一般是通过花键与转向管柱相连,其功能是将驾驶员作用到转向盘边缘上的力转变为转矩后传递给转向管柱,再通过中间轴、转向器、转向拉杆等零部件的传递最终实现车辆的转向。
作为驾驶员直接接触的零部件之一,转向盘对驾驶的舒适性及安全性也十分重要,比如:转向盘的外表皮质感影响驾驶员的手感,外表皮的色泽影响眼部的舒适度,在碰撞中转向盘的弯曲变形能减少驾驶员受到的的伤害等。
转动惯量可以理解为一个物体对于旋转运动的惯性,其值取决于物体的形状、质量分布及转轴的位置,转向盘的转动惯量会影响转向手感、转向盘固有频率、路面冲击对转向盘的反冲、前轮摆动等。
为了考核转向盘的转动惯量是否符合要求,需要通过一定方法进行测试,本文介绍两种测试方法:三线法和正弦加载法。
2 测试方法2.1 三线法2.1.1 三线法测试原理三线法的装置如图1所示:该装置包含一个处于上部的小圆盘,处于下部的大圆盘,三根等长的细线;细线与圆盘的连接点(即悬点)处于以圆盘中心为圆心的圆周上且将圆周三等分。
角度传感器SteeringAngleSensor解析
True Absolute Gray Code track Gen III 绝对值格雷码轨 GEN III
(软件型)
True Absolute Analog track + Gray Code track Gen III + 绝对值 模拟轨+格雷码轨+ GEN III +
2
Steering Angle Sensor
• • • •
Next Generation Steering Angle Sensor 下一代角度传感器
Mechanical Design 机械设计
PA PCB 线路板 Base Plate Screw 基板 Code Wheel 编码轮
螺丝
Coupler Ring 配合环
Striker Bush 震动衬 套
Steering Angle Sensor 角度传感器
1
Steering Angle Sensor (SAS) road course
角度传感器发展历程
SAS
角度传感器ห้องสมุดไป่ตู้
Increment absolute Gen I 绝对增量形 第一代
Increment absolute Gen II (Software) 绝对增量形 Gen II
角度传感器多圈概念
TRW Steering Angle Sensor in Production 量产的TRW角度传感器
• • • • SOP 9/2000 SOP 9/2000 Security concept integrated into the system 安全性集成入系统 – Double computer concept with Reduktanz control – 冗余双电脑控制设计 – Controller Watchdog principle – 控制器看门狗 – LED function control – LED 功能控制 Steering angle sensor of integral a component of the guidance stick housing 角度传感器作为集成元件装在导杆槽 Scope of supply of the safety system 属于安全系统的范围
新一代福特楞奔巡洋舰发动机技术说明说明书

N EWS/ford/fordNext-Gen Ranger Raptor Owners Can Dial-Up Their Exhaust Sound With Modes Ranging from Mild to Wild• Next-gen 292kW V6 Ranger Raptor is equipped with a 2.5-inch active valveexhaust system that allows owners to select the exhaust sound they want• Stay in the good books with your neighbours by setting next-gen Ranger Raptor tostart up in Quiet mode• Baja mode for your phone: download the Ford Ranger Raptor Baja exhaust file tocreate a unique ringtonePRETORIA, South Africa, August 19, 2022 – The next-generation Ranger Raptor is not only built to dominate the deserts and master the mountains, but thanks to the 3.0L twin-turbo V6 model’s new active valve twin exhaust system and four drive modes – including Quiet mode for early morning starts – it ’s designed to keep the peace around town , too .The system is designed to control the noise emitted from the next-gen Ranger Raptor’s powerful 292kW 3.0L twin-turbo V6 via an active exhaust system that opens valves – much like a saxophone or a large pipe organ – to change the sound of the car based on the driver’s mood."For the next Ranger Raptor we wanted to really make the character of the car come alive, to emphasise the power and define the presence of the vehicle, but not make the car tiring when it didn't need to be. We spent hundreds of hours tuning and developing the sound of the vehicle and really think we have something that sounds right for the bakkie,” said Justin Capicchiano, Ford Performance and special vehicle engineering manager.The system can be controlled by the driver based on their preference using the ‘Exhaust Mode ’ button, or automatically according to the drive m ode they’ve selected : Quiet, Normal, Sport or Baja i .Keep it quietOne of the key features customers love most about performance vehicles like next-gen Ranger Raptor is their powerful exhaust note. And while that exhilarating sound is appropriate on the motorway or out in remote areas, in your neighborhood – especially early in the morning or late at night – not so much.By selecting Quiet mode, owners can keep the exhaust sound to a minimum. Even better, next-gen Ranger Raptor allows the scheduling of “q uiet start ”, which allows owners to set Ranger Raptor to always start in Quiet mode, or set a quiet time (with start and end times) to help owners stay on the good side of their neighbours.Manual controlTo change the exhaust sound all you have to do is press the button on the steering wheel that looks like an exhaust pipe. The first press displays a pop-up message on the digital instrumentcluster of the selected mode, while pressing the button again allows you to change the selected exhaust mode.Modes:•Quiet – Quietest setting for all driving conditions.•Normal –Default setting provides a balance of comfort and feedback. Applied by default to Normal, Slippery, Mud/Ruts and Rock Crawl drive modes.•Sport – Slightly louder than normal for spirited driving.•Baja i– Loudest setting for off-road use only. Maximum exhaust noise under all driving conditions.“There’s a lot involved in the science of sound, and we wanted Ranger Raptor to sound the way it looks and drives. The team had to consider and model everything from the whistle produced by the turbochargers to filtering out prolonged tones when driving at a constant speed,” said Capicchiano.“From computer modelling to physical prototypes, the intention was to create a distinctive and emotionally exciting engine note that will have the hair standing up on the arms of those who hear it. We want you to know it’s a Ranger Raptor driving down the road before you see it.”For fans of the Ranger Raptor who want to enjoy the distinctive Baja exhaust note, a ringtone has been created. It can be downloaded from the Ford South Africa website at https://www.ford.co.za/.Notesi Baja mode is intended for off-road use only.# # #About Ford Motor CompanyFord Motor Company (NYSE: F) is a global company based in Dearborn, Michigan, that is committed to helping build a better world, where every person is free to move and pursue their dreams. The company’s Ford+ plan for growth and value creation combines existing strengths, new capabilities and always-on relationships with customers to enrich experiences for and deepen the loyalty of those customers. Ford develops and delivers innovative, must-have Ford trucks, sport utility vehicles, commercial vans and cars and Lincoln luxury vehicles, as well as connected services. Additionally, Ford is establishing leadership positions in mobility solutions, including self-driving technology, and provides financial services through Ford Motor Credit Company. Ford employs about 182,000 people worldwide. More information about the company, its products and Ford Credit is available at or www.quickpic.co.za - follow us at /FordSouthAfrica , /FordSouthAfrica , /FordSouthAfrica or/FordSouthAfricaContact: Felix SebataFord South Africa+27 12 842 2534****************。
汽车研发与制造专业术语汇总中英文对照
PP Production Proveout 生产验证TTO Tool Try-Out 工装设备试运行(J1) Job 1 整车投产DFMEA Design Failure Mode Effects Analysis 故障模式影响分析设计DVP Design Verification Plan 设计验证计划DVP&R Design Verification Plan & Report 设计验证计划和结果FMEA Failure Mode Effects Analysis 故障模式影响分析FPDS Ford Product Development System 福特产品开发系统GYR Green-Yellow-Red 绿-黄-红MRD Material Required Date 物料要求到厂日OTT OK-TO-TOOL 可以开模TKO Tooling-Kick-Off 工装启动OEM original Equipment Manufacturer 设备最初制造厂FtF/F2F Face To Face 面对面会议PV Production Validation 产品验证OTS Off-Tooling-Sample 完全工装样件QOS Quality Operating System 质量运作体系TS-16949 Technical Specification –16949 技术规范-16949 APQP Advanced Product Quality Planning 先期产品质量计划IPD In Plant Date 进厂日PPM Parts per Million (applied to defective Supplier parts) 零件的百万分比率(适用于供应商不合格零件)PPAP Production Part Approval Process 生产件批准程序Pre-PV Pre -Production Validation 产品预先验证1PP- First Phase of Production Prove-Out 第一次试生产3C ?Customer(顾客导向)、Competition(竞争导向)、Competence(专长导向)4S ? Sale, Sparepart零配件, Service, Survey信息反馈5S ?整理,整顿,清理,清洁,素养8D- 8 DisciplineABS ? Anti-lock Braking SystemAIAG ? ? 美国汽车联合会ANPQP Alliance New Product Quality ProcedureApportionment 分配APQP ? Advanced Product Quality PlanBacklite Windshield ?后窗玻璃Benchmark Data ?样件资料bloodshot adj.充血的, 有血丝的BMW ?Bavarian Motor WorksC.P.M ?Certified Purchasing manger ?认证采购经理人制度CB- Confirmation Build 确认样车制造CC- Change CutOff 设计变更冻结CC\SC- critical/significant characteristicCCR ?Concern & Countermeasure RequestCCT ?Cross Company TeamCharacteristics Matrix ? 特性矩阵图COD ? Cash on Delivery 货到付现?预付货款(T/T in advance) CP1- Confirmation Prototype 1st 第一次确认样车CP2- Confirmation Prototype 2nd 第二次确认样车Cpk ?过程能力指数Cpk=Zmin/3CPO ? Complementary Parts orderCraftsmanship ?精致工艺Cross-functional teams 跨功能小组CUV ?Car-Based Ultility VehicleD1:信息收集;8DD2:建立8D小组;D3:制定临时的围堵行动措施,避免不良品流出;D4:定义和证实根本原因,避免再发;D5:根据基本原因制定永久措施;D6:执行和确认永久措施;D7:预防再发,实施永久措施;D8:认可团队和个人的贡献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Steering wheel angle filtering based on wavelettransformChen WeiSchool of Instrument Science and EngineeringSoutheast UniversityNanjing, Chinahenuchenwei.20@Song Xiang,Yu Jiahe,Li Xu School of Instrument Science and EngineeringSoutheast UniversityNanjing, Chinalixu.mail@Abstract—Traditional filtering methods can't eliminate the effect of interfering signals on steering wheel angle and extract useful signal effectively.Regarding to this, this paper presents a new method based on wavelets transform.According to the Mallat algorithm,the method first decomposes the signal for seven layers by selecting sym8 wavelet.Aiming at every layer detail signal after wavelets decomposing, the soft-threshold filtering method is employed to eliminate noises, then the inverse wavelet transform is used to reconstruct the filtered signal.The experimental results show that this method can effectively eliminate all kinds of noises and achieve a good performance.Keywords-steering wheel angle; wavelet transform; filterI.I NTRODUCTIONElectronic stability program(ESP)is an important progress of Automotive Active Safety and also is another innovative security technology after the car seat belts[1].It not only contains all the features of ABS, but also can control the posture of a vehicle and stabilize it, which will greatly reduce the risk of skidding and traffic accidents when the vehicle loses its stability. Because the steering angle signal is an important input parameter of ESP, its accuracy is directly related to the driving safety.In the process of driving, steering wheel angle sensor is susceptible to vibration, strong electromagnetism and other external factors, leading to the steering wheel angle signal contains more interference. In the analysis of this signal, we first need to preprocess the signal and extract the useful signal. Signal filtering methods commonly used are Fourier transform of the signal in time - frequency domain, Kalman filtering and neural network filtering. But for the steering wheel angle signal, because of the strong randomness of interfering signals and their frequency components are complex, the method of Fourier transform of the signal in time - frequency domain can not effectively distinguish between signal and noises when their frequency bands overlap[2]. Kalman filtering requires not only accurate models of state and observation of a system, but also the exact system noise and observation noise. However, these are difficult to get accurately in practice, resulting in low accuracy of the Kalman filtering[3]. Neural network filtering requires more priori data and a longer training time [4], which restrict the application of neural network filter.Thus,there are a lot of inconvenience when the traditional methods above are applied in practice. Therefore, we developed a filtering method to process the steering wheel angle signal, which owns the advantages of convenience and high- precision, overcoming the limitation of the methods above and becoming an urgent requirement in the area of automotive testing. Based on such consideration and according to the characteristics of interfering signals, we use wavelet transform to realize the steering wheel angle signal filtering in this passage.II.WAVELET THEORYA.Basic Theory of Wavelet TransformPresume )(tf is a square-integral function, )(tψ is a basic wavelet and the Fourier transform. If ()ψωsatisfies the admissibility condition below[5]:2()RC dψψωωω=<∞⎰ (1) Then, we can get the wavelet transform of )(tf:1*2,(,),()()a bt bWf a b f a f t dtaψψ+∞--∞-==⎰ (2) In which *()t baψ-is the complex conjugate of ()t baψ-,a is a transformation scale factor, and b is a position factor. As the inverse transform of wavelet transform, the rebuild function of )(tf is:20,)(),(1)(adadbt b a Wf C t f b a ⎰⎰∞+∞∞-=ψψ(3) Where )(1)(,a b t at b a -=ψψ, R b a ∈>,0.B. Multiresolution analysisMultiresolution analysis is one of the most important concepts of wavelet transform. It researches the multiresolutional representation of a function from the aspect of the function, decomposing a signal into low-frequency components and high-frequency components of different resolutions. According to the Mallat algorithm[6], we assume 0,0k C as the original signal, LO_D 、HI_D 、LO_R 、HI_R aslow-pass decomposition filter bank, high-pass decomposition filter bank, low-pass reconstruction filter bank and high-pass reconstruction filter bank, thus the decomposition of 0,0k C is:)_(,,11D LO C D C M M k M k M *=++ (4) )_(,,11D HI C D d M M k M k M *=++ (5)Signal reconstruction algorithm is:R HI Ud R LO UC C M M M k M k M k M _)(_)(11,1,1,*+*=++++(6)Where M k M C , represents the low-frequency coefficient ofthe Mth layer,M k M d , represents the high-frequencycoefficient of the Mth layer, ‘*’represents convolution, ‘—’represents reverse, …D ‟ represents the down sampling by 2, ‘U ’represents the up sampling by 2.With the help of the method above, we can achieve rapid wavelet decomposition and reconstruction of a signal, thus Mallat algorithm is similar to the position of fast Fourier transform (FFT) in the classical Fourier transform.III. F ILTERING METHOD BASED ON WAVELET TRANSFORM This paper selects wavelet shrinkage threshold method to filter the steering wheel angle signal, which is one of the basic methods of wavelet transform filtering. This method can not only eliminate the noise, but also retain the characteristic peak point of the original signal with a good filtering effect, so it has been widely used. Using the wavelet shrinkage threshold value method to filter the signal may generally be divided into the following three steps [7]:(1) Wavelet decomposition of a signal. It needs to choose a wavelet base and determine the number of decomposition layers number N, and use the Mallat algorithm to decompose the signal into N layers.(2) Nonlinear thresholding of high-frequency coefficients. It needs to choose a threshold to process all the high-frequencycoefficients after N layer decomposition with soft-thresholdmethod.(3) Inverse wavelet transformation and the reconstruction of filtered signal. In order to rebuild the filtered signal, this step needs to do the inverse wavelet transform with the Nth layer low-frequency coefficient and the high-frequency coefficients after thresholding from the first layer to the Nth layer . A. Wavelet decomposition of a signalAccording to the characteristics of Steering wheel angle, We choose wavelet sym8 as the most suitable wavelet base. To be able to separate the low-frequency signal and high-frequency noises effectively, and in order to ensure the import singularities of steering wheel angle signal are not lost, the decomposing layers number N is determined to 7 after experimental analysis.First, we consider 0,0k C as the original steering wheelangle signal. The first layer low-frequency coefficient 1,1k C and high-frequency coefficient 1,1k d are computed bytaking down sample by 2 of the convolution of 0,0k C withD LO _ and D HI _ respectively; Similarly, the second layer low-frequency coefficient 2,2k C and high-frequencycoefficient 2,2k d are computed by taking down sample by 2 ofthe convolution of1,1k C with D LO _ and D HI _respectively. Repeating the similar process 7 times, the signal 0,0k C can be decomposed into 7 layers. Figure 1 shows thespecific process, where M =0,1…,6, ‘2↓’represents the down sample by 2, LO_D and HI_D can be determined by the function wfilters in MATLAB.1+1,kM M d +1+1,kM M C +,kC MFig.1 Wavelet decomposing structure of signalB. Nonlinear thresholding of high-frequency coefficientsAfter the high-frequency coefficients in different decomposing layers of steering wheel angle are extracted, threshold processing method is performed, which is the most critical step of the wavelet shrinkage threshold filtering. In order to maintain the whole waveform of the filtered signal unchanged, we use the soft threshold method to process the high-frequency coefficients, leaving all the low-frequency coefficients untouched. The soft threshold method is defined as[8]:Supported by Specialized Research Fund for the Doctoral Program of Higher Education (New Teacher) (No.200802861061) and Nature Science Foundation of Jiangsu Province of China (No. BK2010239),,,,,,0M M MM M M M k M k M k M k M k M k d d d d d d λλλλλ-≥⎧⎪⎪=<⎨⎪+≤-⎪⎩ (7) Where 1,2,...,7,1,2,...,k k l m ==, ,MM k d is the high-frequency coefficients after thresholding. The threshold is chosen through the adaptive threshold selection method based on Stein unbiased likelihood estimation. In practice, We can easily get the threshold λ via the function thselect in MATLAB.C. Inverse wavelet transformation and the reconstruction of filtered signalWith the low-frequency coefficient layer 7th and the high-frequency coefficients after thresholding from the first layer to the 7th layer, We carry out the inverse wavelet transformation to rebuild the filtered signal according to Mallat algorithm.The process of rebuild is shown in Figure 2.+1,M M k C + 1,M M kd ++ ,MM kCFig.2 The figure of the inverse wavelet transformWhere M =6, 5,…, 0,77,k C =77,k C ,‘2↑’represents the up sample by 2, 00,k Cis the filtered signal of steeringwheel angle. Similarly, LO_R and HI_R can be determined bythe function wfilters in MATLAB.IV. E XPERIMENTAL RESULTSThe steering wheel angle signal measured in a experiment is shown in Figure 3and the sampling interval is 20 milliseconds. From the figure, we can see the original signal contains a lot of gross errors and noises.Fig.3 Original steering wheel signalBecause of the gross errors, We firstly choose the Medianfiltering method to eliminate them. Then, steering wheel angle signal is decomposed into 7 layers with wavelet base sym8 .All thecoefficients are shown in Figure 4, in which a1,a2,…, a7 are low-frequency coefficients in different layer and d1,d2,…, d7 are the high- frequency coefficients in different layer.Fig.4 Low and high frequency coefficients of signal by 7-layerdecomposingFiltered signal of steering wheel angle and the originalsignal are shown in Figure 5, and the red line shows the filtered signal, the blue line for the original signal. We can find that this method not only almost completely eliminates the noises, but also ensures the important feature information of the signal not lost, achieving a quite favorable effect.Fig.5 The comparison of original signal and filtered signal by wavelettransformTo further illustrate the effect of wavelet transform filtering, we compare the results of Butterworth filtering and wavelet transform filtering. Butterworth filtering is a filtering method which is based on Fourier transform of the signal in time – frequency domain. The results of comparing shown in Figure 6, in which red line shows the Butterworth filtered signal, the blue line shows the signal which was filtered by the method mentioned in this passage. We could find that Butterworth filtering cannot completely filter out the noise interference, and there is obvious shock at the initial stage, hence the effect of filtering is much worse than the effect of wavelet filtering.Fig.6 The comparison of filter results of Butterworth and wavelettransformA CKNOWLEDGMENTIn this paper, due to the characteristic of steering wheel angle signal and interference signals, we use the wavelet transform to filter the steering wheel angle signal. According to the Mallat algorithm, the method firstly decomposes the signal into seven layers by selecting wavelet base sym8, then process the decomposed high-frequency coefficients obeying the rules of soft thresholding, and finally get the filtered signal by reconstruction. In conclusion, this method can remove the noises of steering wheel angle signal effectively, and achieved good filtering performance, providing a good guarantee for ESP, which has a high application value.R EFERENCES[1]Masami,Akio okada, “Analysia of vehicle stability control (VSC)'seffectiveness from accident data”, 18th ESV Conference, 2003,Nagoya ,Japan, pp.541-547.[2]Fadi Al-Badour, L.Cheded, and M.Sunar,“Non-stationary vibrationsignal analysis of rotating machinery via time-frequency and wavelettechniques”, 2010 10th International Conference on InformationSciences Signal Processing and their Applications (ISSPA),,2010,pp:21-24.[3] Giaouris, D.,Finch, J.W.,“Electric drives estimation and denoisingschemes based on wavelet transforms”,IEEE Industrial Electronics,IECON 2006 - 32nd Annual Conference on,2006,pp:1223-1228[4]Jiang Zongli, Introduction to Artificial Neural Networks. China, Beijing:Higher Education Press, 2001.[5]Mallat S, A Wavelet Tour Of A Signal Procseeing,Second Edition.China,Beijing :China Machine Press, Sep 2003.[6] Hai Wang, weigong Zhang, “Application of Wavelet Transform inVehicle Speed Signal Denoising”, Internation Conference onMeasuring Technology and Mechatronics Automation, ICMTMA‟09,2009, Vol.3, pp:191-194 [7] Donoho D L,“De-Noising by soft-thresholdin g”, IEEE Transaction onInformation Theory, 1995, vol.41, No.3, pp.613-627.[8]Yuan guo,Zhengyao Bai, “A new denoising method of SAR imagines incurvelet domain”, 10th International Conference on Control,Automation, Robotics and Vision, 2008.ICARAV 2008, Hanoi, Vietnam,17–20 December 2008, pp:1909-1913.。