IS620N配合倍福控制器操作案例修订版本
EtherCAT操作案例

操作案例下面以倍福公司的TwinCAT主站为例,讲述IS620N伺服驱动器的简单配置使用过程。
1,安装TwinCAT2,把IS620N的EtherCAT配置文件(IS620N-ECT.XML)拷贝到TwinCAT安装目录:\TwinCAT\IO\EtherCAT。
3,打开TwinCAT。
4,安装TwinCAT网卡驱动打开上图菜单“Show Real Time Ethernet Compatible Devices…”,跳出下图对话框,在“Incompatble devices”栏选上本地网站后,点击“install”。
安装完成后如下图在“Instaled and ready to use devices ”栏出现已经安装好的网卡。
5,设备搜索新建一个新的工程页后,开始搜索设备,选上“”点击“”如下图:“确定”“OK”“是”“否”(如果不需要使用NC轴,此步点击“否”)“否”,到这里设备已经搜索完成,如下图:6,烧写XML文件按上述1,2,3步骤,点击3后显示如下:依次点击“ESC Access”→“E2PROM”→“Smart View”后,点击“Write E2PROM”,出现下述对话框:点击“ok”后,等待XML文件烧录完毕,对话框自动关闭并自动返回下述界面:点击“确定”,XML文件烧录成功。
7,配置PDO7.1配置RPDO:默认的RPDO为1701,,将其勾选去掉,选择0x1600在PDO Content窗口右击,“Delete(删除)”默认的607A和60B8,并“Insert(插入)”60FF7.2配置TPDO默认的TPDO为1B01,,将其勾选去掉,选择0x1A00在PDO Content窗口右击,“Delete(删除)”默认的不要用的对象,并“Insert(插入)”预使用的对象:606C(速度反馈),6074(转矩指令)、200B-1C(驱动器温度)等。
8,点击图中圆圈内向配置模式转变,或者快捷键“Shift F4”加载I/O设备对话框,点击“是”是否激活选择“是”“是”后设备进入OP状态。
IS620P系列伺服用户手册简易版

IS620P系列伺服用户手册简易版到货产品是否与您订购的产品型号相符?箱内含您订购的机器、请通过伺服电机、伺服驱动器的铭牌型号进行确认。
请查看整机外表,产品在运输过程中是否有破损现象。
若发现有某种遗漏或损坏,请速与本公司或您的供货商联系解决。
能够用手轻轻转动则属正常。
带抱闸的伺服电机除外。
目录前言 (1)版本变更记录 (3)第1章伺服系统选型 (7)1.1 伺服电机及驱动器型号说明 (9)1.2 伺服系统配置规格一览表 (10)1.3 配套线缆 (11)1.3.1 非抱闸机型配套线缆 (11)1.3.2 抱闸机型配套线缆 (11)1.3.3 接插套件 (12)1.3.4 绝对值电池套件 (13)1.3.5 通信线缆 (13)1.3.5 线缆外观 (13)1.4 制动电阻相关规格 (15)第2章伺服电机及驱动器安装与尺寸图 (16)2.1 伺服电机的安装 (16)2.1.1 安装场所 (16)2.1.2 环境条件 (16)2.1.3 安装注意事项 (16)2.2 伺服电机外形尺寸图 (18)2.2.1 ISMH1系列Z电机外形尺寸图 (18)2.2.2 ISMH2(Vn=3000rpm,Vmax=6000/5000rpm)系列外形尺寸图 (21)2.2.3 ISMH3(Vn=1500rpm,Vmax=3000rpm)系列外形尺寸图(23)2.2.4 ISMH4(Vn=3000rpm,Vmax=6000rpm)系列Z电机外形尺寸图 (25)2.3 伺服驱动器的安装 (27)2.3.1 安装场所 (27)2.3.2 环境条件 (27)2.3.3 安装注意事项 (28)2.4 伺服驱动器外形尺寸图 (29)第3章伺服驱动器与电机的连接说明 (30)3.1 伺服驱动器主电路回路连接 (31)3.1.1 主电路端子介绍 (31)3.1.2 主电路连接电缆推荐型号及规格 (33) 3.1.3 电源配线实例 (36)3.1.4 伺服驱动器输出与电机线缆连接方法 (38) 3.2 伺服电机编码器信号连接方法 (40)3.2.1 总线式增量编码器连接 (40)3.2.2 总线式绝对值编码器连接 (43)3.3 控制信号端子连接方法 (49)3.3.1 位置指令输入信号 (51)3.3.2 模拟量输入信号 (59)3.3.3 数字量输入输出信号 (60)3.3.4 编码器分频输出电路 (63)3.3.5 抱闸配线 (64)3.4 通信信号配线 (68)3.4.1 CAN通信组网连接 (69)3.4.2 485通信组网连接 (71)3.4.3 与PC的通信连接(232通信) (73) 3.5 模拟量监视信号配线 (74)3.6 电气接线的抗干扰对策 (75)3.6.1 抗干扰配线举例及接地处理 (75)3.6.2 噪音滤波器的使用方法 (76)3.7 线缆使用的注意事项 (78)第4章运行模式与调试方法 (79)4.1 位置模式使用说明 (79)4.1.1 位置控制模式配线 (80)4.1.2 位置控制模式相关功能码设定 (81)4.2 速度模式使用说明 (85)4.2.1 速度模式配线 (86)4.2.2 速度模式相关功能码设定 (87)4.3 转矩模式使用说明 (91)4.3.1 转矩模式配线 (92)4.3.2 转矩模式相关功能码设定 (93)4.4 绝对值系统使用说明 (98)4.4.1 概述 (98)4.4.2 相关功能码设定 (98)4.4.3绝对值系统电池盒使用注意事项 (102) 4.5软限位功能 (103)4.6 运行前检查 (104)4.7 负载惯量辨识与增益调整 (105)4.7.1 惯量辨识 (106)4.7.2 自动增益调整 (107)4.7.3 手动增益调整 (108)4.7.4 陷波器 (108)第5章后台软件 (110)第6章故障处理 (111)6.1 启动时的故障和警告处理 (111)6.1.1 位置控制模式 (111)6.1.2 速度控制模式 (114)6.1.3 转矩控制模式 (116)6.2 运行时的故障和警告处理 (117)6.2.1 故障和警告代码表 (117)6.2.2 故障的处理方法 (122)6.2.3 警告的处理方法 (142)6.2.4 内部故障 (148)第7章功能码参数一览表 (149)H00组伺服电机参数 (149)H01组驱动器参数 (150)H02组基本控制参数 (151)H03组端子输入参数 (152)H04组端子输出参数 (155)H05组位置控制参数 (157)H06组速度控制参数 (160)H07组转矩控制参数 (161)H08组增益类参数 (163)H09组自调整参数 (164)H0A组故障与保护参数 (166)H0B组监控参数 (167)H0C组通讯参数 (169)H0D组辅助功能参数 (171)H0F组全闭环功能参数 (172)H11组多段位置功能参数 (172)H12组多段速度参数 (176)H17组虚拟DIDO参数 (180)H30组通讯读取伺服相关变量 (183) H31组通讯给定伺服相关变量 (184) DIDO功能定义 (184)。
IS620N简易手册(软件篇)

目录1 EtherCAT通信基础 (3)1.1 EtherCAT通讯规范 (3)1.2 通讯结构 (3)1.3 状态机 (4)1.4 过程数据PDO (5)1.5 邮箱数据SDO (5)1.6 分布时钟 (6)1.7 状态指示 (6)1.8 CiA402控制介绍 (7)1.9 基本特性 (8)1.9.1 接口信息 (8)1.9.2 拓扑连接 (8)1.9.3 通讯电缆 (9)1.9.4 EMC标准 (9)2 基本模式 (10)2.1 操作模式及通信周期 (10)2.1.1 模式定义 (14)2.1.2 各模式支持通信周期 (16)未定义书签。
2.1.3 控制字定义 .......................................................... 错误错误!!未定义书签错误!!未定义书签未定义书签。
2.1.4状态字定义 ........................................................... 错误2.2 周期同步位置模式 (19)2.2.1 控制框图 (20)2.2.2 相关对象 (21)2.2.3 转换因子 (17)2.2.4相关功能设置 (22)2.3 周期同步速度模式 (23)2.3.1控制框图 (23)2.3.2相关对象 (23)2.3.3 相关功能设置 (25)2.4 周期同步转矩模式 (25)2.4.1 相关对象 (26)2.4.2 相关功能设置 (27)2.5 轮廓位置模式 (27)2.5.1 框图 (28)2.5.2 相关对象 (28)2.5.3 相关功能设置 (30)2.5.4 位置曲线发生器 (30)2.6 轮廓速度模式 (35)2.6.1控制框图 (35)2.6.2相关对象 (35)2.6.3 相关功能设置 (36)2.7 轮廓转矩模式 (37)2.7.1 相关对象 (37)2.7.2 相关功能设置 (38)未定义书签。
倍福壁厚控制器说明

概览在界面的底部有12个按钮。
按下按钮Fx,界面将会切换到对应特殊的功能页面。
F1 壁厚控制页面此页面可以显示壁厚跟踪曲线。
壁厚控制段号:通过下面的箭头按钮可以切换不同的壁厚控制段。
基本壁厚:通过箭头按钮或输入数值修改基本壁厚。
轮廓壁厚:通过箭头按钮或输入数值修改轮廓壁厚。
点操作:可用上下箭头移动光标选中已经有的点,使用删除/增加按钮删除或增加点。
点序号:可用上下箭头移动光标选中点,也可以输入数值选中点。
点壁厚:可以使用箭头按钮增加或减少壁厚,也可以用输入数值定义壁厚。
壁厚曲线修改后,激活按钮会变成橙色,这时可以按下激活按钮将修改下载到PLC当中。
连续式挤出模式的壁厚控制参数自动时间: 选中这个选项,壁厚控制按照机器上个循环时间运行,如果不选中这个选项,壁厚控制则按照设定的自动循环时间运行。
实际运行时间: 实际壁厚运行时间。
自动开始: 壁厚按照周期时间自己启动,不需要启动促发信号。
口模开位: 数值设定口模位置。
选中这个选项,口模会保持在口模位置上。
此功能用于测试口模开位。
储料缸挤出模式的壁厚控制参数射料量: 一次工作射出的胚料量.存留量: 一次工作射出完成后,储料缸存留的胚料量。
口模等待位置: 装料过程中口模的停留位封口延时:挤出结束后,口模封口的延时时间。
口模开位: 数值设定口模开位。
选中这个选项,口模会保持在口模位置上。
射料参数只有是储料缸挤出式的机器才会有这个页面。
修改射料控制曲线跟壁厚控制曲线一样。
在射料和充料两种不同的模式中,显示棒显示不同的颜色:储料缸充料 储料缸射料储料缸参数射料量: 设定每次射出的体积存留量: 存留体积,设完后还存留的体积.射回电压: 储料缸里无料时,用回将活塞拉回的电压。
射料延时时间:到达射料位置后延时一段时间射料.附加功能按住功能键,会出现附加功能菜单编辑凸轮: 凸轮可用于检测曲线的实际位置。
你可以在页面的左侧看到这个凸轮位置。
可以在启动位置,停止位置输入你需要的凸轮位置。
AM600+IS620N常见应用问题处理-归档

前 言AM600+IS620N常见应用问题处理前 言本手册是汇川技术公司AM600系列可编程控制器与IS620N 系列伺服系统搭配使用的常见故障处理指导文档,旨在指导本公司市场服务人员更高效地进行现场故障排查。
IS620N 系列伺服驱动器&伺服电机前 言AM600+IS620N常见应用问题处理版本变更记录目 录AM600+IS620N常见应用问题处理目 录前 言 (1)版本变更记录 (2)一、EtherCAT 通信类故障 (5)伺服运行中报ER.E08故障 (5)网络启动时,主站和IS620N 通信不上 (10)工程中显示的从站顺序混乱 (17)二、参数配置类故障 (18)PDO 参数配置不合理导致伺服无输出 (18)三、常见Er 码 (21)ER.b00:位置偏差过大 (21)ER.b01:位置指令过大 (24)ER.E08:同步丢失 (26)ER.E15:同步周期误差过大 (28)四、后台通信异常类 (29)InoProShop 扫描不到目标设备 (29)InoProShop 网关出现异常 (32)InoProShop 连接设备时不稳定 (35)五、回零类故障 (37)回零不能正常工作 (37)六、数据溢出类故障 (40)数据溢出导致绝对值轴位置突变 (40)七、同步周期&任务周期 (45)简介:EtherCAT 总线周期跟任务周期 (45)EtherCAT 主站跟从站数据交换 (48)实际速度与设定速度不一致(电机传动参数配置无误) (49)位置指令呈阶梯状 (51)除了EtherCAT 正常通讯以外,其他功能响应慢,通讯实时性较差 (52)目 录AM600+IS620N常见应用问题处理八、轴飞车或抖动 (53)EtherCAT总线型伺服驱动器匀速运行过程中,电机抖动(未报错) (53)当伺服驱动器切换控制模式时,电机发生抖动 (55)九、借用DIDO (57)AM600如何使用IS620N的DI/DO (57)限位开关接控制器如何使用伺服回原 (59)十、修改持久性变量后的常见异常现象 (60)持久性变量列表不生效 (60)持久性列表中修改persistent变量时,后台编译错误 (62)登录设备后,persistent变量数据被清除 (63)十一、常见问答 (64)1、PLC程序为什么无法上传到电脑? (64)2、轴运动遇到限位时如何复位? (64)3、伺服报错ER.108如何处置? (64)4、AM600内EtherCAT报错,如何重启? (65)5、InoProShop常用的个性化设置? (66)6、InoProShop扫描设备的操作步骤和注意事项? (67)7、InoProShop的中文兼容性问题? (68)伺服运行中报ER.E08故障一、EtherCAT通信类故障伺服运行中报ER.E08故障☞■具体故障表象:IS620N在运行过程中报出ER.E08。
ISN配合倍福控制器操作案例修订版本

IS620N配合倍福控制器操作案例下面以倍福公司得TwinCAT主站为例,讲述IS620N伺服驱动器得简单配置使用过程。
1.安装TwinCAT软件与倍福官网得twinCAT软件最高支持到win7 32位系统,win7 64位系统不支持。
Windows xp系统:建议安装tcat_2110_2230Windows 7 32位系统系统:建议安装tcat_2110_2248注意:关于网卡,必须选择采用intel芯片得百兆以太网卡。
其她品牌得网卡,存在不支持EtherCAT运行得风险。
2.把IS620N得EtherCAT配置文件(IS620N-ECT、XML)拷贝到TwinCAT安装目录:\TwinCAT\IO\EtherCAT。
3.打开TwinCAT4.安装TwinCAT网卡驱动打开上图菜单“Show Real Time Ethernet patible Devices…”,跳出下图对话框,在“Inpatble devices”栏选上本地网站后,点击“install”。
安装完成后如下图在“Instaled and ready to use devices ”栏出现已经安装好得网卡。
5.设备搜索新建一个新得工程页后,开始搜索设备,选上“”点击“”如下图:“确定”“OK”“就是”“就是”“否”,到这里设备已经搜索完成,如下图:6.配置伺服参数在“CoE-Online”界面,通过SDO通讯设置参数。
200C-0Eh为3时,通过SDO更改得参数具有掉电保存属性。
以将6060h修改为轮廓速度模式(3)为例,操作步骤如下:注:此操作必须确认右下角模式为配置模式(config mod),并且伺服功能码H0200为9才能正常操作。
7.配置PDO1)配置RPDO:默认得RPDO为1701(用户不可更改PDO映射内容),将其勾选去掉,选择0x1600以实现轮廓速度模式为例,操作步骤如下:在PDO Content窗口右击,“Delete”默认得607A与60B8,并“Insert”60FF2)配置TPDO:默认得TPDO为1B01,,将其勾选去掉,选择0x1A00在PDO Content窗口右击,“Delete”默认得不要用得对象,并“Insert”预使用得对象:606C(速度反馈),6074(转矩指令)等8.激活配置并切换到运行模式。
NJ使用EtherCAT控制IS620N
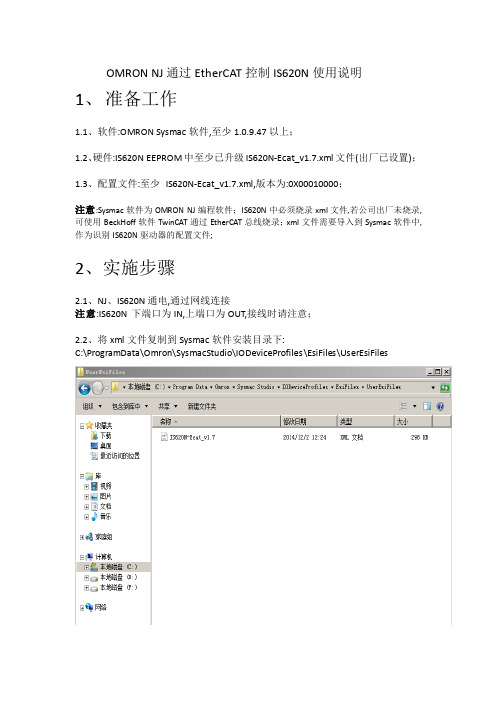
OMRON NJ通过EtherCAT控制IS620N使用说明1、准备工作1.1、软件:OMRON Sysmac软件,至少1.0.9.47以上;1.2、硬件:IS620N EEPROM中至少已升级IS620N-Ecat_v1.7.xml文件(出厂已设置);1.3、配置文件:至少IS620N-Ecat_v1.7.xml,版本为:0X00010000;注意:Sysmac软件为OMRON NJ编程软件;IS620N中必须烧录xml文件,若公司出厂未烧录,可使用BeckHoff软件TwinCAT通过EtherCAT总线烧录;xml文件需要导入到Sysmac软件中,作为识别IS620N驱动器的配置文件;2、实施步骤2.1、NJ、IS620N通电,通过网线连接注意:IS620N 下端口为IN,上端口为OUT,接线时请注意;2.2、将xml文件复制到Sysmac软件安装目录下:C:\ProgramData\Omron\SysmacStudio\IODeviceProfiles\EsiFiles\UserEsiFiles2.3、新建工程2.4、通讯设置2.5、打开EtherCAT配置2.6、从右侧toolbox中选择IS620N,可以拖拽、双击方式在EtherCAT网络下增加站点,根据实际添加从站个数;2.7、注意,若是刚出厂新伺服,则需要写入节点地址,选择”在线”-右击“主设备”-“写入设备节点地址”,新伺服刚接入NJ系统中节点默认为0,修改成不为零即可,修改完毕后,选择“与物理网络配置比较并合并”2.8、选择”应用物理网络配置”2.9、选择CPU扩展机架-“与实际单元配置比较和合并”2.10、选择需要设置的节点号,选择”编辑PDO映射设置”2.11、输出输出映射设置(重要)输入PDO:控制字:6040;模式选择:6060;目标位置:607A;探针功能:60B8;输出PDO状态字:6041;模式显示:6061;实际位置:6064;探针状态:60B9;探针1位置值:60BA;探针2位置值:60BC;错误码:603F;数字输入:60FD;2.12、选“运动控制设置”-“轴控制”-添加-轴设置2.13、设置轴类型-伺服器轴(其中有伺服轴、编码器轴、虚轴概念),选择输出设备2.14、根据PDO配置中使用到的数据,配置输出、输入数据以及数字信号,注意PDO映射不可以设错,否则控制器会报错轴错误注:60FD对于DI状态:伺服报:ER950:P-OT 即正向超程;ER952:N-OT即反向超程;2.15、设置编码器分辨率以及电机一圈需要的位置值2.16、速度限制2.17、选择回原点方式以上、轴配置设置完成.3、程序中通过功能块控制伺服3.1、使用MC_Power控制伺服使能3.2、使用MC_Move实现相对、绝对定位功能3.3、使用MC_MoveJog实现点动功能3.4、使用MC_Home实现原点回归功能,使用回原点之前可以先确认.NJ中限位与原是否正常!MC_Axis000.DrvStatus.N_OT 正限位MC_Axis000.DrvStatus.P_OT 负限位MC_Axis000.DrvStatus.HomeSw 原点开关注:IS620N中仅需要修改如下参数:H0C-05 EtherCAT 站号Kitch.Gong2015-01-12。
《汇川伺服产品》

MS1H1-05B30CB-A331Z MS1H1-05B30CB-A334Z MS1H1-10B30CB-A331Z MS1H1-10B30CB-A334Z MS1H1-20B30CB-A331Z MS1H1-20B30CB-A334Z MS1H1-40B30CB-A331Z MS1H1-40B30CB-A334Z MS1H1-75B30CB-A331Z MS1H1-75B30CB-A334Z MS1H4-40B30CB-A331Z MS1H4-40B30CB-A334Z MS1H4-75B30CB-A331Z MS1H4-75B30CB-A334Z
驱动器产品介绍
IS620M 机床 搭载23位绝对值编码器 M2高速总线
IS650P 较大功率应用场合 包涵小功率一切功能 脉冲、CAN
SV820N 四合一高性能小功率 多轴伺服 一般及高端应用场合 EtherCAT、CanOpen 搭载23位绝对值编码器
IS810
中大功率多传伺服
共直流母线组网一体化 应用
➢ 应用模型——物流转运
行业应用
➢ 应用总结
命名规则
IS810
IS810
➢ IS810系列
型号 IS810N-INT IS810N IS810P
功能描述 EtherCAT总线控制、 CAN EtherCAT总线
脉冲控制方式
兼容上位机
AM600,欧姆龙NJ, 倍福,Codesys体系
AM600,欧姆龙NJ, 倍福,Codesys体系
H3U,标准PLC,脉 冲板卡
举例说明: 排料机构 铁板印刷后道 中断式位置控制
龙门同步功能
由上位机同时给两驱动器发脉冲指令, 通过 两个电机上的编码器将反馈位置脉冲信息交 互并采样交叉耦合的方式实时调节电机的速 度,使双轴位置同步。大型龙门式结构可以 使用双轴驱动, 减少机械耦合。控制器将自 行作同步的追随,当位置偏差量超过设定的 容许值时,则会发出异常警告,停止系统的 运作。
828D简明调试手册_2019 4.8 SP4
IS620N简易手册(软件篇)
目录1 EtherCAT通信基础 (3)1.1 EtherCAT通讯规范 (3)1.2 通讯结构 (3)1.3 状态机 (4)1.4 过程数据PDO (5)1.5 邮箱数据SDO (5)1.6 分布时钟 (6)1.7 状态指示 (6)1.8 CiA402控制介绍 (7)1.9 基本特性 (8)1.9.1 接口信息 (8)1.9.2 拓扑连接 (8)1.9.3 通讯电缆 (9)1.9.4 EMC标准 (9)2 基本模式 (10)2.1 操作模式及通信周期 (10)2.1.1 模式定义 (14)2.1.2 各模式支持通信周期 (16)未定义书签。
2.1.3 控制字定义 .......................................................... 错误错误!!未定义书签错误!!未定义书签未定义书签。
2.1.4状态字定义 ........................................................... 错误2.2 周期同步位置模式 (19)2.2.1 控制框图 (20)2.2.2 相关对象 (21)2.2.3 转换因子 (17)2.2.4相关功能设置 (22)2.3 周期同步速度模式 (23)2.3.1控制框图 (23)2.3.2相关对象 (23)2.3.3 相关功能设置 (25)2.4 周期同步转矩模式 (25)2.4.1 相关对象 (26)2.4.2 相关功能设置 (27)2.5 轮廓位置模式 (27)2.5.1 框图 (28)2.5.2 相关对象 (28)2.5.3 相关功能设置 (30)2.5.4 位置曲线发生器 (30)2.6 轮廓速度模式 (35)2.6.1控制框图 (35)2.6.2相关对象 (35)2.6.3 相关功能设置 (36)2.7 轮廓转矩模式 (37)2.7.1 相关对象 (37)2.7.2 相关功能设置 (38)未定义书签。
倍福beckoff编程手册精编版

目录
第2页
4.8 梯形图编辑器..........................................................................................................................132
4.9 连续功能图编辑器 ..................................................................................................................137
自动化技术
TwinCAT PLC 编程手册
德国倍福电气有限公司 2005 年 5 月
目录
第1页
目录
1 TwinCAT PLC Control 简介...............................................................................................................1 1.1 引言............................................................................................................................................1 1.2 项目组件.....................................................................................................................................3 1.3 语言..........................................................................................................................................10 1.3.1 编程语言............................................................................................................................10 1.3.2 指令表 (IL) ........................................................................................................................10 1.3.3 结构化文本(ST) ............................................................................................................12 1.3.4 顺序功能图(SFC)..........................................................................................................17 1.3.5 功能块图(FBD) .............................................................................................................21 1.3.6 连续功能图编辑器(CFC)...............................................................................................21 1.3.6 梯形图(LD) ...................................................................................................................22 1.4 调试,联机功能 ........................................................................................................................24
汇川IS620系列伺服应用案例3一典型的总线定位控制(CANLink3.0)(下)

汇川IS620系列伺服应用案例3一典型的总线定位控制(CANLink3.0)(下)d、AXISDRVA:绝对定位【1】指令参数说明:轴号:K1~K16,最多16个轴,需要把伺服站号设置对应的轴号。
只能填入立即数。
位置:实际发给伺服的脉冲当量。
如1000表示1000个脉冲;速度:定位速度。
值为1000,则伺服定位速度为1000转/分。
注意:会连续占用后续两个字元件。
完成标记:起动后检测改元件即可知道是否定位完成,一般使用时,定位完成后可以启动同一个站号定位指令。
错误标记:当发生错误时置位。
使能断开后会复位完成标记以及错误标记。
【2】指令举例:【2】指令占用资源(D0,D1)位置脉冲数,(D2,D3)伺服电机转数,(D4,D5)内部运算,D10加减速时间,M10定位完成标志,M11定位错误标志。
e、AXISZRN回零【1】指令参数说明:轴号:需要回零的轴号,K1~K16原点位置偏移:如果需要的话可以设置原点偏移脉冲数的,一般设置为0,D或者R元件。
其后占用2个D元件作为内部运算使用。
完成标记:回零完成后标记,S或M元件。
错误标记:错误标记位,发生错误后置位。
指令举例:【2】指令资源占用(D20,D21)原点偏移脉冲数,(D22,D23)内部运算,M20回零完成标志,M21回零错误标志。
f、AXISJOG点动【1】指令参数说明轴号:需要控制点动的伺服站号或轴号速度:D元件或者R元件。
其后占用2个D元件作为内部运算使用。
正向点动:M或者S元件,指令使能时且改位为ON时正向动作,OFF时停止。
反向点动:M或者S元件,指令使能时且该为ON时反向动作,OFF时停止。
注意:反向点动后一个M或者S元件被占用,作为错误报警。
正向反向同时使能则不动作,另外,AXISJOG点动功能与AXISZRN回零指令的能流不能同时使能,上述动作均会动作,从而导致不可预想的行为。
【2】指令举例:【3】指令资源占用(D30,D31)点动速度,(D32,D33)内部运算,M30点动正转,M32错误报警。
西克(SICK)LECTOR620操作手册_中文版

LECTOR620中文操作手册安装距离和角度扫描器的安装距离是指从扫描器的窗口到条码表面的距离。
每种条码的阅读距离都不同,因此安装过程中阅读距离的确定需要查阅相关型号的技术参数。
例如,对于0.5mm分辨率的条码,其最大的视野范围是175mm×112mm(如右图),对应最大视野范围的安装高度为260mm为了避免条码表面对红光直接的反射,条码阅读器一般不采取垂直于条码表面的安装方式,应倾斜20°安装软件操作步骤(1)首先打开SOPAS 软件,一般安装SOPAS后会出现两个软件图标,一个是SOPAS,一个是SOPAS Single Device,两个是同一个软件,不同的是界面排版不同,推荐使用SOPAS Single Device界面版本(2)进入以下画面,会自动搜寻出两个设备,两个所不同是端口号,一个是以太网主口2112,一个是以太网辅口2111,推荐选择2112(3)若搜寻设备的结果如下图则说明扫描枪IP地址与电脑IP地址不一致,可修改电脑IP或扫描枪IP,注意修改时要保证扫描枪和电脑IP地址前三段一致,最后一段不同,同时保证子网掩码相同(4)修改扫描枪IP地址时,可选自动获取或者使用固定IP,推荐使用固定IP地址用于调试和通讯(5)出现选择画面,勾选尾缀为2112的扫描枪,点击继续,即可进入软件主界面。
(6)进入主界面,现处于运行模式Operation ,界面如下图:(7)调试时切换到编辑模式,点击Edit ,此时读码器连续拍照,光源一致闪烁,显示实时图像,右侧有8电脑IP 地址扫描枪IP 地址个参数栏,常用的参数栏如下:(8)第一项参数Camera & Illumination 相机和光源设定:调试要点:图像一定要清晰,根据实际情况调节曝光时间,增益和对比度获取稳定的阅读效果(9)第二项参数Codes 条码设定:本产品可同时阅读一维条码,二维PDF417码,二维码,根据所要读取的条码种类勾选相应的码制1. 相机和光源设定2. 条码种类设定3. 触发设定4. 通讯接口和信号输出设定5. 输出格式设定(10)以上图像和条码设定也可通过自学习方式完成,点击Auto Setup自动设定,如下:(11)点击后显示如下画面,首先调整Reading Distance阅读距离使图像聚焦清晰,调整Shutter time曝光时间使图像变亮,在条码的位置拖动鼠标画一个区域覆盖条码,点击继续进入自学习过程(12)学习成功后如下画面,点击继续;若自学习不成功则会显示Fail,此时可进入软件手动调整参数(13)显示如下实时阅读画面,点击结束完成自学习(14)第三项Trigger & Digital Input触发和输入信号设定,本产品触发读码器方式有很多种,常用是Sensor/Input 1,由外部接入开关量信号触发读码器开始阅读,结束阅读也有多种方式并且可以组合使用,满足任意条件均可结束阅读(15)第四项Interface & Digital Output 通讯接口和信号输出设定,常用通讯方式是串口RS232和以太网(16)串口通讯设置:点开Serial Host ,通常情况下无需修改参数,默认参数即可,但要注意波特率Baud rate 要和上位机一样触发开始串口 输出信号(17)以太网通讯设置:点开Ethernet Host,a.当需要设扫描枪为服务器端时则选择Server模式,上位机需要输入扫描枪的IP地址和端口号,其中端口号可根据需要修改,默认为2112;b.当需要设定扫描枪为客户端时则选择Client模式,此时需要输入上位机的IP地址和端口号,其中端口号可根据需要修改,默认为2112(18)扫描枪支持两路输出,以设定Output/Result 1输出信号为例,可设定成功读取Good Read或者读不到No Read时输出信号,输出电压默认为24V PNP型,也可通过反转功能变成0V有效,NPN型(19)第五项Data Processing 数据处理设定,扫描枪输出的数据格式可根据需要灵活编辑,点击Data Processing 中的Output Format1选项,默认输出格式如下图即“如果成功读取则输出条码内容,否则输出NoRead ”,可以在此处编辑,例如在条码后加入回车换行(20)数据输出格式也可通过设置向导Wizard 完成,点击Wizard 选择好所要的格式后点击继续(21)设定所需要读的码的最多和最少数量,点击继续码可在条码之间加分隔符Code Separator,如空格,斜杠等,设置完成后点击结束(23)设定完成后切换为运行模式Operation ,点击Operation 即可(24)点击参数下载和永久保存,将参数保存在扫描器中:(25)本软件自带数据接收终端,显示所读取到的数据,可用于调试串口和以太网通讯是否正常,点击数据终端Terminal ,以以太网通讯为例操作如下:若是串口则选择用户自定义连接。
chc-620标准流程详解

chc-620标准流程详解下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!CHC-620标准流程详解:理解与应用CHC-620,全称为“社区健康服务标准”,是由澳大利亚健康认证服务机构(Australian Commission on Safety and Quality in Health Care, ACSQHC)制定的一套针对社区健康服务的标准。
NJ使用EtherCAT控制IS620N
OMRON NJ通过EtherCAT控制IS620N使用说明1、准备工作1.1、软件:OMRON Sysmac软件,至少1.0.9.47以上;1.2、硬件:IS620N EEPROM中至少已升级IS620N-Ecat_v1.7.xml文件(出厂已设置);1.3、配置文件:至少IS620N-Ecat_v1.7.xml,版本为:0X00010000;注意:Sysmac软件为OMRON NJ编程软件;IS620N中必须烧录xml文件,若公司出厂未烧录,可使用BeckHoff软件TwinCAT通过EtherCAT总线烧录;xml文件需要导入到Sysmac软件中,作为识别IS620N驱动器的配置文件;2、实施步骤2.1、NJ、IS620N通电,通过网线连接注意:IS620N 下端口为IN,上端口为OUT,接线时请注意;2.2、将xml文件复制到Sysmac软件安装目录下:C:\ProgramData\Omron\SysmacStudio\IODeviceProfiles\EsiFiles\UserEsiFiles2.3、新建工程2.4、通讯设置2.5、打开EtherCAT配置2.6、从右侧toolbox中选择IS620N,可以拖拽、双击方式在EtherCAT网络下增加站点,根据实际添加从站个数;2.7、注意,若是刚出厂新伺服,则需要写入节点地址,选择”在线”-右击“主设备”-“写入设备节点地址”,新伺服刚接入NJ系统中节点默认为0,修改成不为零即可,修改完毕后,选择“与物理网络配置比较并合并”2.8、选择”应用物理网络配置”2.9、选择CPU扩展机架-“与实际单元配置比较和合并”2.10、选择需要设置的节点号,选择”编辑PDO映射设置”2.11、输出输出映射设置(重要)输入PDO:控制字:6040;模式选择:6060;目标位置:607A;探针功能:60B8;输出PDO状态字:6041;模式显示:6061;实际位置:6064;探针状态:60B9;探针1位置值:60BA;探针2位置值:60BC;错误码:603F;数字输入:60FD;2.12、选“运动控制设置”-“轴控制”-添加-轴设置2.13、设置轴类型-伺服器轴(其中有伺服轴、编码器轴、虚轴概念),选择输出设备2.14、根据PDO配置中使用到的数据,配置输出、输入数据以及数字信号,注意PDO映射不可以设错,否则控制器会报错轴错误注:60FD对于DI状态:伺服报:ER950:P-OT 即正向超程;ER952:N-OT即反向超程;2.15、设置编码器分辨率以及电机一圈需要的位置值2.16、速度限制2.17、选择回原点方式以上、轴配置设置完成.3、程序中通过功能块控制伺服3.1、使用MC_Power控制伺服使能3.2、使用MC_Move实现相对、绝对定位功能3.3、使用MC_MoveJog实现点动功能3.4、使用MC_Home实现原点回归功能,使用回原点之前可以先确认.NJ中限位与原是否正常!MC_Axis000.DrvStatus.N_OT 正限位MC_Axis000.DrvStatus.P_OT 负限位MC_Axis000.DrvStatus.HomeSw 原点开关注:IS620N中仅需要修改如下参数:H0C-05 EtherCAT 站号Kitch.Gong2015-01-12。
IS620N配合倍福控制器操作案例修订版本

IS620N配合倍福控制器操作案例下面以倍福公司的TwinCAT主站为例,讲述IS620N伺服驱动器的简单配置使用过程。
1.安装TwinCAT软件与倍福官网的twinCAT软件最高支持到win7 32位系统,win7 64位系统不支持。
Windows xp系统:建议安装tcat_2110_2230Windows 7 32位系统系统:建议安装tcat_2110_2248注意:关于网卡,必须选择采用intel芯片的百兆以太网卡。
其他品牌的网卡,存在不支持EtherCAT运行的风险。
2.把IS620N的EtherCAT配置文件(IS620N-ECT.XML)拷贝到TwinCAT安装目录:\TwinCAT\IO\EtherCAT。
3.打开TwinCAT4.安装TwinCAT网卡驱动打开上图菜单“Show Real Time Ethernet Compatible Devices…”,跳出下图对话框,在“Incompatble devices”栏选上本地网站后,点击“install”。
安装完成后如下图在“Instaled and ready to use devices ”栏出现已经安装好的网卡。
5.设备搜索新建一个新的工程页后,开始搜索设备,选上“”点击“”如下图:“确定”“OK”“是”“是”“否”,到这里设备已经搜索完成,如下图:6.配置伺服参数在“CoE-Online”界面,通过SDO通讯设置参数。
200C-0Eh为3时,通过SDO更改的参数具有掉电保存属性。
以将6060h修改为轮廓速度模式(3)为例,操作步骤如下:注:此操作必须确认右下角模式为配置模式(config mod),并且伺服功能码H0200为9才能正常操作。
7.配置PDO1)配置RPDO:默认的RPDO为1701(用户不可更改PDO映射内容),将其勾选去掉,选择0x1600以实现轮廓速度模式为例,操作步骤如下:在PDO Content窗口右击,“Delete”默认的607A和60B8,并“Insert”60FF2)配置TPDO:默认的TPDO为1B01,,将其勾选去掉,选择0x1A00在PDO Content窗口右击,“Delete”默认的不要用的对象,并“Insert”预使用的对象:606C(速度反馈),6074(转矩指令)等8.激活配置并切换到运行模式。
倍福NC与KINCO JD伺服连接说明20151026

倍福NC与KINCO JD伺服CANOPEN通讯步骤1.设备(1)控制器: BECKHOFF(2) CANOPEN: BECKHOFF EL6751(3)伺服驱动器: Kinco JD630(4)电机: Kinco SMH-130D-0377-30ABK-HH(5)连接线:PC与JD630使用USB-RS232线EL6751与JD630接线方式:(两端2、7之间分别连接120欧姆电阻)JD630 EL67512(CAN_L) 23(CAN_GND) 37(CAN_H) 7注意:多个站通讯时要在首站(PLC)、末站2、7脚之间分别加120欧姆终端电阻。
通讯线必须使用屏蔽双绞线,屏蔽网焊在9针头的金属壳上。
3.使用软件TwinCAT 和JD-PC4.调试流程(1)电脑与伺服驱动器的连接,配置伺服电机,设置驱动器参数(2)通过CAN总线建立倍福与KINCO伺服系统的连接。
5.配置Kinco的驱动器5.1电脑与伺服驱动器的连接配置Kinco的驱动器需使用Kinco的JD-PC 软件,此软件无需安装,下载之后解压缩即可直接使用。
(1)打开JD-PC 软件包,双击图标,打开软件使用平台如下:菜单栏工具栏(2)新建工程在软件界面上单机文件→新建,弹出如下对话框选择RS232C,点击下一步(3)进入通讯属性选择界面,设置COM,波特率,驱动器ID下图为默认设置参数,COM口编号根据USB-Serial线连接的电脑USB接口的不同而不同,驱动器ID在出厂时已设置为1。
在设置完成后点击通讯状态按钮。
注意:若不知道驱动器当前站号,可以把驱动器ID设置成广播地址127,然后连上驱动器在驱动器/控制面板/F005组参数中可以查看修改驱动器ID。
(4)观察软件界面右下角属性Comm Status:Open COM1 38400,通讯状态指示灯也变绿,证明已经联机成功。
此时,工具栏的指示灯呈绿色,闪烁状态,如下图打开驱动器/基本操作页面可以看到驱动器当前的一些工作状态。
嵌入式控制器-德国倍福培训手册

K-bus 或 E-bus
64 MB 闪存(外部 CF 卡), 256 MB RAM(内置,不可扩 展)
K-bus 或 E-bus
64 MB 闪存(外部 CF 卡), 256 MB RAM (expandable to 512 MB, 1 GB)
K-bus、IP-Link 或 E-bus
64 MB 闪存(外部 CF 卡), 256 MB RAM(可扩展至 512 MB,1 GB)
PC 接口
CPU
CX1030-N0xx
CX1030
RS232 Audio Ethernet
-N040 -N020 -N060
CX1100-0910
-M750 -M520 -M510 -M310 -M200
从站 CX1500-Bxx0
RS232 DVI/USB -N030 -N010
CX1020-N0xx
RS422/ RS485 接口
USB/DVI 接 口
RS232 接 口
电源模块和 I/O 接口
带以太网接口的基 本 CPU 模块
嵌入式控制器 12.04.2013 5
嵌入式控制器
现场总线接口
嵌入式控制器 12.04.2013 6
嵌入式控制器
系统一览
UPS
CX1100-0900
现场总线接口
主站 CX1500-Mxx0
512 MB RAM (CX5010) 或 1 GB RAM (CX5020);内置,不可扩展
64 MB CF 卡
极为紧凑的模块外壳 100 x 100 x 91 mm (W x H x D) 适合 DIN 导轨安装,无风扇
固定的、不可扩展的系统接口: 2 x RJ45 以太网接口,10/100 Mbit/s,DVI 接口; 2 x USB 2.0 接口,可选 RS232/ RS422/RS485 或用于 EtherCAT, PROFINET, PROFIBUS 和 CANopen 等的现场总 线主/从站接口
汇川IS620系列伺服应用案例7一伺服非标应用(龙门同步功能)

汇川IS620系列伺服应用案例7一伺服非标应用(龙门同步功能)1.工程描述:大跨度的机械基本采用龙门粱的链接模式,通过两台电机实现驱动,为提高两轴运行时的同步性,需采用同步模式,前期同步通过上位机实现,伺服只作为执行机构,现在侧完全由伺服驱动器完成龙门同步控制,上位机仅做简单的开环位置控制以及逻辑控制。
【1】传动方式:电机+滚珠丝杆【2】减速比:1:1【2】使用场合:玻璃切割2、产品选型与配线3、伺服基本参数设置和说明:4、增益调整【1】首先在不使用龙门同步功能情况下,检查上位机以及伺服的基本设定是否正确,检查机械机构的连接是否正常。
【2】根据现场负载情况,将两台驱动器均开启负载惯量比在线辨识功能(H09-03为非0值),辨识方法请查看样本。
【3】上位机输出脉冲指令,先低速来回移动龙门结构,确定机构以及伺服电机可正常运行,再逐步的加快来回移动速度,通过H08-15观察负载惯量比。
【4】负载惯量比基本稳定后,将负载惯量比数值手动输入各驱动器H08-15参数中,并关闭在线惯量辨识功能H09-03=0(当机械机构上面的负载不对称时,各自的惯量比会有所不同,但基本一致),负载惯量比是伺服电机稳定运行的基础,请尽量保证此值准确。
【5】调整伺服增益,请参考使用手册5、同动参数设定:上述增益参数设定后,通过汇川驱动调试平台观测运行波形,运行时无过冲、超调、停止后无异音,说明两轴能够顺利运行,再此基础上基础龙门同动参数的设定。
6、同步设定开启:上述龙门同步参数设定完成后,通过参数H0F-31观察另外一轴的反馈脉冲量,判断龙门同步的配线是否正确,若脉冲接线正确,则进入同步设定开启步骤。
同步开启的参数设定:此参数设定为龙门同步使能,在此机械系统中,通过上位机给出使能信号,其步骤为:上电后通过回原点模式对立,或手动对位。
完成后龙门同步功能使能,同动偏差清零,然后伺服驱动器进入龙门同步运行状态。
上电后进入会原点模式,回原点完成后,龙门同步功能使能,同步偏差清零,然后伺服驱动器进入龙门同步运行状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IS620N配合倍福控制器操作案例
下面以倍福公司的TwinCAT主站为例,讲述IS620N伺服驱动器的简单配置使用过程。
1.安装TwinCAT软件
与倍福官网的twinCAT软件最高支持到win7 32位系统,win7 64位系统不支持。
Windows xp系统:建议安装tcat_2110_2230
Windows 7 32位系统系统:建议安装tcat_2110_2248
注意:
关于网卡,必须选择采用intel芯片的百兆以太网卡。
其他品牌的网卡,存在不支持EtherCAT运行的风险。
2.把IS620N的EtherCAT配置文件(IS620N-ECT.XML)拷贝到TwinCAT安装目录:
\TwinCAT\IO\EtherCAT。
3.打开TwinCAT
4.安装TwinCAT网卡驱动
打开上图菜单“Show Real Time Ethernet Compatible Devices…”,跳出下图对话框,在“Incompatble devices”栏选上本地网站后,点击“install”。
安装完成后如下图在“Instaled and ready to use devices ”栏出现已经安装好的网卡。
5.设备搜索
新建一个新的工程页后,开始搜索设备,选上“”点击“”如下图:
“确定”
“OK”
“是”
“是”
“否”,到这里设备已经搜索完成,如下图:
6.配置伺服参数
在“CoE-Online”界面,通过SDO通讯设置参数。
200C-0Eh为3时,通过SDO 更改的参数具有掉电保存属性。
以将6060h修改为轮廓速度模式(3)为例,操作步骤如下:
注:此操作必须确认右下角模式为配置模式(config mod),并且伺服功能码H0200为9才能正常操作。
7.配置PDO
1)配置RPDO:默认的RPDO为1701(用户不可更改PDO映射内容),将其勾选去掉,选择0x1600
以实现轮廓速度模式为例,操作步骤如下:
在PDO Content窗口右击,“Delete”默认的607A和60B8,并“Insert”60FF
2)配置TPDO:默认的TPDO为1B01,,将其勾选去掉,选择0x1A00
在PDO Content窗口右击,“Delete”默认的不要用的对象,并“Insert”预使用的对象:606C(速度反馈),6074(转矩指令)等
8.激活配置并切换到运行模式。
点击“”
“确定”
“确定”后,在“Online”界面,可观察到设备进入OP状态,同时伺服面板第二位数码管显示“8,面板显示88RY
9.通过NC控制伺服或者PLC程序控制伺服9.1、伺服运行在周期同步位置模式
9.1.1设置单位
测试时选择单位为:mm
9.1.2设置量化因子
测试时设置量化因子为:60/1048576
9.1.3设置编码器反馈模式为pos
Pos:上位机只负责发位置指令,伺服运行在周期同步位置模式(6060=8),位置环由伺服内部计算;
PosVelo:上位机建立位置环,输出速度指令,伺服运行在周期同步速度模式(6060=9);
9.1.4点动测试
暂时屏蔽系统偏差
点击“Set”跳出对话框,再点击“All”,这时伺服驱动器已经使能。
通过F1~F4,点动运行。
9.2、伺服运行在周期同步速度模式
9.2.1设置单位
9.2.2设置量化因子
9.2.3设置编码器反馈模式为posvelo
9.2.4设置速度输出系数
9.2.5选择控制类型
9.2.6设置控制参数
根据实际响应,调节位置环比例:
根据实际响应,调节速度前馈系数:
9.2.6点动测试
点击“Set”跳出对话框,再点击“All”,这时伺服驱动器已经使能。
通过下图按键点动电机
使用functions运行一些简单的动作,下面举了一个小例子:
选择absolute指令,给一个目标位置和目标速度,点击运行即可。
使用SDO数据做简单的动作
首先将twincat模式切换为configuration模式。
如上图,将6060设置为3,60FF设置为1048576,60E0和60E1设置为3000。
6040依次设置为6、7、15。
即可速度模式运行。
现在使用PLC+HMI来简单运行一段程序。
现将伺服复位一下(H0231)。
确认一下twincat上的电子齿轮比,如下图,本例使用的1:1。
新建一个PLC程序
新建一个工程
新建一个new pou,选择语言类型并命名,本例都使用默认,后续可以根据需要选择。
调用运动模块,实验IS620N伺服一些简单的动作。
程序写好之后,请先保存,然后rebuild all一下,主要是验证错误,并生成xxx.tpy文件。
打开SYSTEM MANAGER 软件之后,右键PLC-configuration点击Append PLC project,添加xxx.tpy文件
通过链接的方式将PLC上的变量和轴上的变量链接。
进行完上述操作后,必须主动激活配置,前面的操作才能生效。
打开PLC control 点击ONLINE----login,然后点击ONINE----run。
点击PLC最下面的第三个按钮
新建如下HMI窗口
点击POWER可使轴上电。
点击home可驱使轴开始回原点,switch开关模拟原点开关。
Jog+使轴向正向移动。
Jog-使轴向反向移动。
Move让轴走一段位置。
Reset置位轴参数。
使用倍福示波器采集波形
在windows左下角的开始菜单中找到twincat scope view软件打开。
打开软件之后,然后点击add scope view,选择示波器图的类型,可以是Y轴采样或者是XY轴采样,并且设置此示波器的名字。
右键scope view1,点击add channel,这里的通道就是一个采样值,因此可以多添加几个通道,采集不同变量。
选中channel,点击Acquisition,然后点击CAHNGE来选择Channel2通道,AMS NET ID填写目标控制器的Netid为local,server por为501 NC,然后选择速度变量。
下为采集的回原点速度波形。