第一篇简单控制
控制计划模板
控制计划模板第一篇:控制计划模板概述一、控制计划的定义控制计划是指为了实现项目目标,对项目活动进行控制的计划。
控制计划包括如何监控项目活动,如何纠正偏差,如何识别潜在的问题,如何采取行动以及相应的时间表和责任人。
二、编制控制计划的目的1. 确保项目按时按质地达成预期目标,提高项目成功的几率;2. 帮助识别风险并采取措施以确保项目成功;3. 为项目团队提供具体而明确的行动计划,包括控制和纠正措施;4. 为项目团队提供实时反馈,以了解项目执行情况,确认目标是否仍然可行。
三、控制计划的编制步骤1. 确认项目目标和范围描述项目的预期结果以及实现这些结果所需的全部工作,并明确项目范围的界定。
2. 识别项目的主要风险明确可能对项目成功造成威胁的风险,并确定相关的控制计划。
3. 定义控制指标和标准定义用于衡量项目进度和质量方面的关键性能指标。
4. 描绘项目的时间表根据任务列表、资源可用性和所需的关键里程碑,制定项目进度表。
5. 分配责任分配任务,并确定负责人。
6. 制定监测和控制计划明确监测项目进展和采取纠正措施的方式。
四、控制计划的基础内容1. 项目目标和范围描述2. 项目进度表和时间表3. 项目成本和预算4. 项目人员安排5. 主要风险分析和控制计划6. 质量控制计划7. 项目变更管理计划8. 项目沟通计划9. 确认采购计划10. 项目审核计划五、控制计划的实施1. 采用信息系统实时监控项目进展;2. 每月向高层管理者报告项目状态;3. 根据实际情况及时调整控制计划。
第二篇:控制计划模板具体编写一、项目目标和范围描述项目名称:项目目标:项目范围:二、项目进度表和时间表项目开始日期:项目结束日期:任务编号任务名称负责人计划开始日期计划完成日期实际开始日期实际完成日期完成百分比三、项目成本和预算项目总预算:支出项目支出金额支出比例预算金额四、项目人员安排角色姓名安排时间五、主要风险分析和控制计划风险名称风险描述风险等级采取控制措施六、质量控制计划计划名称实施内容执行人员七、项目变更管理计划变更类型变更原因变更内容变更审批人八、项目沟通计划沟通形式沟通内容沟通对象沟通时间九、确认采购计划采购物品名称采购数量采购方式交付时间十、项目审核计划审核类型审核目的审核时间审核负责人第三篇:控制计划的执行和监督一、执行控制计划1. 分配任务并设定优先级根据任务的级别,将任务分配给适当的团队成员,并设定优先级,以确保任务按时完成。
自动控制原理范文
自动控制原理范文自动控制原理是指通过采集和反馈系统的状态信息,根据一定的规则和算法实现对系统的自动调整和控制的一种技术。
它是现代工业自动化和信息技术的基础,广泛应用于电力、化工、石油、冶金、机械、交通运输和航空航天等各个领域。
自动控制原理的核心思想是通过测量系统的输出信号,与期望的参考信号进行比较,然后根据误差信息去调整系统的输入信号,使系统能在预期的性能要求下工作。
本文将从控制系统的基本概念、自动控制系统的组成、控制系统的闭环和开环两种结构、PID控制器等方面进行详细讲解。
一、控制系统的基本概念1.控制系统:由被控对象、控制器、传感器和执行器等组成,用于实现对被控对象状态或行为的调节。
2.被控对象:指需要被调节或控制的对象,也称作控制对象或物理对象。
3.反馈系统:通过传感器采集被控对象的状态信息,并将其送回控制器进行处理,然后生成相应的控制信号输入到执行器中。
4.开环系统:指没有反馈链路的控制系统,控制器的输出仅与被控对象相关,而不与被控对象的状态信息有关。
5.闭环系统:指具有反馈链路的控制系统,通过采集被控对象的状态信息,与期望的参考信号进行比较,产生误差信号,然后经过控制器进行处理生成控制信号,调整系统的输入信号。
二、自动控制系统的组成自动控制系统主要由四部分组成:被控对象、传感器、控制器和执行器。
被控对象接受控制器输出的控制信号,并给传感器提供输入信号,传感器采集被控对象的状态信息,将其转换成电信号送回控制器进行处理,控制器对传感器采集的信息进行比较并生成控制信号,最后控制器的输出信号通过执行器对被控对象进行调节。
三、控制系统的闭环和开环两种结构1.开环控制系统:开环系统的特点是系统的输出不受外界干扰和错误影响,控制器的输出仅与输入信号有关。
开环系统无法动态调整,当系统受到外界扰动时无法及时做出调整。
2.闭环控制系统:闭环系统引入了稳定反馈机制,通过比较控制器输出信号与期望参考信号之间的误差,调整输入信号,实现系统的自动调整和稳定。
自动控制的基本知识

七、调节过程的品质指标 调节过度过程: 1)等幅振荡 2)扩散振荡 3)衰减振荡 4)非周期过程
1。稳定性:衰减率
Ψ愈大,越稳定。 Ψ=0.75~0.98
2.准确性:准确性是指被控量的偏差大小,它包括动态偏差yM和 静态(稳态)偏差yK 动态偏差:在控制过程中,被控量与给定值之间的最大偏差称为动态偏差. 静态偏差:在控制过程结束后,被控量的稳态值y∞与给定值yg之间的残余
只包含一个容积
单容对象是最简单的热工调节对象,电厂热工生产过程中 许多储水容器,如除氧器、加热器、凝汽器等。
2)多容对象
包含两个或以上容积
(1)有自平衡能力的多容对象: 可用一个迟延时间为τ的纯迟延环节和个时间常数为Tc的惯性环节 近似。
(2)无自平衡能力的多容对象: 可用一个迟延时间为τ的纯迟延环节和一个积分环节近似。
3。阶跃响应特性:比较直观 在阶跃输入信号的作用下,系统的输出特性。 突然的扰动。 在电厂生产过程中,有许多输入信号近似于阶跃信号, 如负荷突然变化,阀门、挡板的开与关等。只要生产 过程允许,一般也比较容易通过控制机构(如控制阀 门)或扰动机构造成一个阶跃输入扰动。所以常在现 场用阶跃响应试验来检验控制系统的工作性能。
3。比例带δ对调节过程的影响
比例带: 3。比例带δ对调节过程的影响
比例带δ 小:调节作用强;
比例带δ太小:调节阀动作过频繁,不稳定。
二、积分调节规律调节器(P)
1。积分规律调节器的动态特性
U (S ) 1 WI ( S ) KP E (S ) Ti s 式中 Si——称为积分规律调节器的积分速度; Ti,——积分时间,习惯上多用积分时间来表示被调量偏差 积累的快慢。 Ti 越小表示偏差积累越快,积分作用越强。Ti是积分规律调节 器的整定参数。
【精选】控制仪表及系统1、2章习题11

均不能点燃爆炸性气体混合物; ib是指在正常工作和一个故障时不能点燃
爆炸性气体混合物。
1-6.常用的防爆型控制仪表有哪几类?各有什么特点? 答:常用的防爆型控制仪表有隔爆型和本质安全型两类仪表。 (一)隔爆型仪表
隔爆型仪表具有隔爆外壳,仪表的电路和接线端子全部置于防 爆壳体内,其表壳的强度足够大,隔爆结合面足够宽,它能承受仪 表内部因故障产生爆炸性气体混合物的爆炸压力,并阻止内部的爆 炸向外壳周围爆炸性混和物传播。这类仪表适用于1区和2区危险场 所。隔爆型仪表安装及维护正常时,能达到规定的防爆要求,但当 揭开仪表外壳后,它就失去了防爆性能,因此不能在通电运行的情 况下打开表壳进行检修或调整。 (二)本质安全型仪表
1-8.什么是安全栅?说明常用安全栅的构成和特点。 答:安全栅作是本安型仪表的关联设备,它一方面传输信号,另一方面 控制流入危险场所的能量在爆炸性气体或混合物的点火能量以下,以确 保系统的本安防爆性能。
安全栅的构成形式有多种,常用的有齐纳式安全栅和隔离式安全栅 两种。 1、齐纳式安全栅
齐纳式安全栅是基于齐纳二极管反向击穿性能而工作的。如图0-7 所示。在正常工作时,安全栅不起作用。
注:正常使用时,K I
A3CM mCI
,m
1,10
,K I
104或105;K P由决定,设定
后为定值,一般情况下,KP 0.2。
控制精度与K
D无关,K
只影响动态偏差。
D
1 .
2 7.某PID控制器(正作用)输入、输出信号均为4 ~ 20mA,控制器初始 值Ii Io 4mA, 200%, TI 2 min,TD 2 min,K D 10,在t 0 时输入2mA的阶跃信号,即I(i 0) 2mA,分别求取t 12s时(1)PI 工况下(2)PD工况下的输出值。 解:
过程与控制课程标准解读

过程与控制课程标准解读全文共四篇示例,供读者参考第一篇示例:过程与控制课程是工程技术类专业的重要课程之一,涉及到工程设计中的流程、方法和工具等方面的知识。
掌握过程与控制课程不仅可以提高工程师的工作效率,还可以保证工程项目的安全性和可靠性。
下面我们将详细解读过程与控制课程的标准,帮助读者更好地理解该课程的内容和重要性。
一、过程与控制课程的基本概念过程与控制课程主要是研究如何根据系统的输入和输出来设计和优化系统的控制方法。
在实际工程项目中,系统是一个复杂的集成体系,包括各种传感器、执行器和控制器等组件。
过程与控制课程的目标是通过控制方法来实现对系统的精确控制,从而保证系统的稳定性和性能。
二、过程与控制课程的教学内容过程与控制课程的教学内容主要包括以下几个方面:1. 系统建模与系统辨识:系统建模是过程与控制课程的基础,通过建立系统的数学模型来描述系统的结构和行为。
系统辨识是根据系统的输入和输出数据来确定系统的动态特性和参数。
掌握系统建模和系统辨识方法可以帮助工程师更好地理解和控制系统的行为。
2. 控制技术:控制技术是过程与控制课程的核心内容,包括PID控制、自适应控制、模糊控制、神经网络控制等方面的知识。
通过学习控制技术可以帮助工程师设计和实现不同类型的控制系统,提高系统的稳定性和性能。
3. 优化方法:优化方法是过程与控制课程的重要内容,包括线性规划、非线性规划、参数优化、鲁棒优化等方面的知识。
通过优化方法可以帮助工程师优化系统的控制策略和参数,提高系统的性能和效率。
4. 实践案例:过程与控制课程通常会结合实际工程案例进行教学,帮助学生将理论知识应用到实际工程项目中。
通过实践案例可以帮助学生更好地理解和掌握过程与控制课程的内容,提高实际应用能力。
三、过程与控制课程的学习方法学习过程与控制课程需要注意以下几个方面的学习方法:1. 坚实基础:过程与控制课程是建立在数学和物理等基础知识之上的,学生需要确保自己具备扎实的数学和物理基础,才能更好地理解和掌握该课程的内容。
st语言控制代码

st语言控制代码全文共四篇示例,供读者参考第一篇示例:ST语言(Structured Text)是一种常用的PLC编程语言,用于控制工业自动化系统中的各种设备和过程。
ST语言类似于传统的高级编程语言,如C语言和Pascal,但是更适合用于实时控制和监控应用。
在ST语言中,程序员可以编写结构化的代码来实现各种功能,包括逻辑控制、循环控制、数学运算、数据处理等。
本文将介绍ST语言的基本语法和常用控制代码,帮助读者了解如何使用ST语言编写控制程序。
一、ST语言基本语法1. 变量声明在ST语言中,变量是程序中存储数据的基本单位。
变量可以是基本类型,如整数、实数、布尔值等,也可以是结构体或数组。
变量声明的语法如下所示:VARi : INT := 0; //声明一个整型变量i,并初始化为0r : REAL := 0.0; //声明一个实数变量r,并初始化为0.0b : BOOL := TRUE; //声明一个布尔变量b,并初始化为TRUE2. 控制结构ST语言支持常用的控制结构,如if-else语句、for循环、while循环等。
这些结构用于根据条件执行不同的代码块或重复执行某个代码块。
控制结构的语法如下所示:IF condition THEN//执行代码块ELSIF condition THEN//执行代码块ELSE//执行代码块END_IFFOR i := 0 TO 10 DO//执行代码块END_FORWHILE condition DO//执行代码块END_WHILE3. 函数和函数调用ST语言支持定义函数来封装一些功能,以便在程序中多次重复使用。
函数的语法如下所示:FUNCTION Add(a : INT; b : INT) : INTVARresult : INT;BEGINresult := a + b;RETURN result;END_FUNCTION函数调用的语法如下所示:result := Add(3, 5);二、ST语言常用控制代码1. 逻辑控制ST语言提供了逻辑运算符(AND、OR、NOT)和比较运算符(<、>、=、<>)来实现逻辑判断。
控制理论与控制工程
控制理论与控制工程控制理论与控制工程是现代科学技术中重要的学科之一。
控制理论是研究控制系统的数学模型建立和性能分析的科学。
它以控制工程为应用领域,广泛应用于自动化、电力、机械、航空、航天等各个领域。
本文将重点介绍控制理论的基本概念和主要方法,以及控制工程在现实应用中的具体案例。
第一篇:控制理论的基本概念和主要方法控制理论是研究如何使系统按照既定要求和期望运行的科学。
它的基本概念主要包括系统、信号、控制器和反馈。
系统指的是需要控制的对象或过程,信号是用来传递信息或驱动系统的输入,控制器是根据输入信号和系统反馈信息采取相应措施的设备或算法,反馈是指将系统的状态或输出信息返回给控制器进行分析和调整。
在控制理论中,常用的控制方法有开环控制和闭环控制。
开环控制是指控制器的输出仅依赖于输入信号,而不考虑系统的反馈信息。
它简单直接,应用广泛,但对于系统的不确定性和外界扰动较为敏感。
闭环控制是指控制器的输出会根据系统的反馈信息进行调整,以实现对系统状态的监控和稳定控制。
闭环控制具有良好的稳定性和鲁棒性,但较为复杂,需要考虑控制器设计和系统模型的各项指标。
控制理论中的主要方法包括传递函数法、状态空间法和最优控制方法。
传递函数是用来描述系统输入与输出之间关系的数学工具,它基于拉普拉斯变换,能够方便地分析系统的动态特性和稳态响应。
状态空间是描述系统状态变量的方程和参数的一组关联方程,它能够全面地描述系统的动态行为和稳定性,并能够适应非线性和时变系统的分析与设计。
最优控制方法则是在系统的性能指标和约束条件下,通过优化算法寻求最佳控制方案,以实现系统的最优性能。
控制理论的研究和应用离不开数学和工程的支持。
数学提供了分析和求解控制问题的数学工具和方法,如微积分、线性代数、概率论和最优化理论等。
工程提供了实际系统中的应用场景和数据,通过实践和实验来验证和改进控制理论的方法和算法。
第二篇:控制工程在现实应用中的具体案例控制工程是将控制理论应用于实际系统的工程领域。
远程控制说明书
远程控制说明书第一篇:远程控制说明书远程控制BTY-8015说明1、安装SIM卡:打开主控机前面4棵螺丝,打开盖子,你发现有一个SIM卡架,象装手机卡一样,装上后盖上。
2、设置控制号码:设置控制号码共可以设10个号,如我要设***、***为控制号,那么你就用手机发送“666******”,最多能加10个控制号;3、短信控制:开指令:全开—999,开第一路—on1,开第二路—on2,开第三路—on3,依次类推每发一个开指令,如果开成功后,会有信息反馈,如开第一路后,会有“1on OK”反馈关指令:全关—000,关第一路—off1,关第二路—off2,关第三路—off3,依次类推每发一个关指令,如果关成功后,会有信息反馈,如关第一路后,会有“1offOK”反馈4、定时及修改时间:1)定日期格式如*09/01/20*ON*09/01/25*OFF*,2)定时间格式如*18/40*START*20/00*END*表示,在2009年1月20日至2009年1月25日期间,18:40分全开,20:00全关。
3)取消:取消预约ESC4)、修改时间指令为TIME09/01/20,14:505、拨号控控制:可用任何一部授权的固定电话或其他手机号码拨打本机,(其他未授权号码将无法接通,确保你的安全受控)直接按键键入如:“3*此时三路继电器为开通状态;此时若保持通话,还可以继续键入其他号码如6*此时第六路为开;若键入3#此时第三路关闭;其他同理;注意:键入每个按键时间要大于2秒;6、短信查询:555发送到本机卡号码。
本机会自动把8路开关状态以数字形式发送到第一个设定的报警号码,接收到内容如10010000表示第1、4为关闭状态,235678为开通状态。
第二篇:2012最新远程控制(范文)2012最新远程控制2012最新远程控制:网络人U盾版远程控制软件——2012最新远程控制。
见过有U盾的远程控制软件吗?2012最新远程控制网络人U盾版问世!只有U盾所有者才能使用该网络人账号。
传染病的消毒隔离制度及控制措施[修改版]
![传染病的消毒隔离制度及控制措施[修改版]](https://img.taocdn.com/s3/m/f949783a05087632301212f7.png)
第一篇:传染病的消毒隔离制度及控制措施ICU病房传染病的消毒隔离制度及控制措施一、病房一旦收治无法转院或住院期间发现急性传染病人时,应设单间,隔离病人应有明显的隔离标记,防止交叉感染。
二、病房应设有传染病人专用的血压计,听诊器等。
三、呼吸道传染病,如结核、麻疹、风疹、水痘、腮腺炎、流脑等,在标准预防的基础上执行额外预防。
将病人安置在单独的房间,病室应紧闭房门、开窗保持室内空气流通,病人戴口罩,不得离开病室,严禁不同病室病人间相互接触。
四、血液、体液隔离的传染病,如:乙型肝炎、艾滋病、梅毒等,应进行窗边隔离,实施标准预防措施。
护理用具(体温计、扫床巾、便器等)专用,病人的血液、排泄物、呕吐物(稀薄的排泄物或呕吐物,每1000ml加漂白粉50g或20000mg/L有效氯含氯消毒剂溶液2000ml,搅匀放置2小时。
无粪的尿液每1000ml 加入干漂粉5g或1000mg/L有效氯含氯消毒剂溶液100ml混匀放置2小时)。
经过有效消毒后排入下水道。
五、肠道隔离:如急性腹泻、痢疾、霍乱等肠道传染病,同种病原体感染可居一室,实施标准预防措施。
工作人员接触传染病物质时戴手套,在护理病人前后要洗手。
便器可用含氯消毒剂5000mg/L浸泡30分钟消毒,消毒液要漫过容器。
卫生间专用。
六、凡传染病人使用的医疗器械按消—洗—消程序处理,病人用过的物品未经消毒不得带出病房,病房定时进行消毒,病人转院或死亡后应进行终末消毒。
七、病人产生的生活垃圾均视为医疗垃圾处理。
八、工作人员进入病区应带工作衣、鞋、帽,进入污染区护理、接触病人时要穿隔离衣,戴口罩,离开时脱去,并应消毒双手。
九、严格探视及陪护制度,陪护要遵守隔离要求。
2009年4月制订沈阳市第四人民医院ICU第二篇:控制传染病的消毒隔离制度控制传染病的消毒隔离制度(1)按病种分室接诊,分区收治,条件允许时每一病种占用一个病区。
(2)病人住院入病区时,除带必需生活用品外,其他一律不得带入(3)病人住院期间,不得互串病室,不可随意外出,病人活动最好是局限于污染区内。
单回路反馈控制系统
第一篇过程控制系统第一章单回路反馈控制系统简称:单回路控制系统、简单控制系统在所有反馈控制系统中,单回路反馈控制系统是最基本、结构最简单的一种。
在生产过程控制中应用得最为广泛的、并能解决大量控制问题的系统(70%)。
研究单回路系统的分析和设计方法,是研究复杂控制系统的基础。
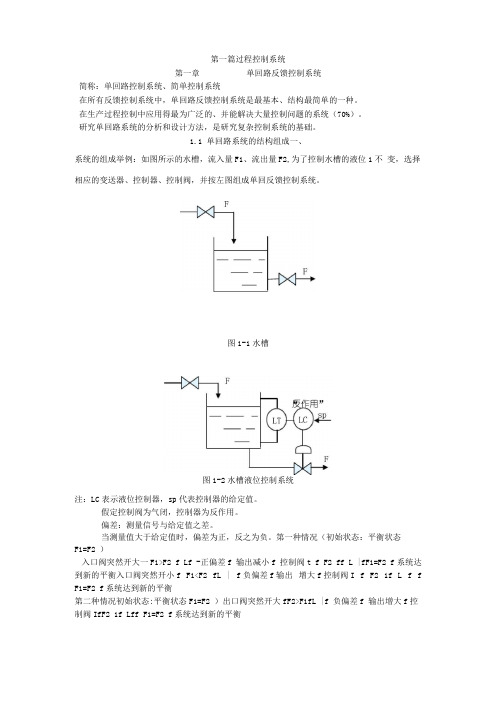
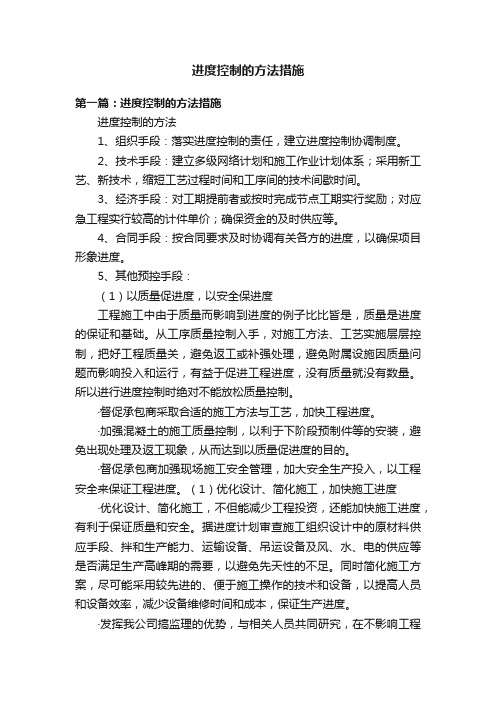
1.1 单回路系统的结构组成一、系统的组成举例:如图所示的水槽,流入量F1、流出量F2,为了控制水槽的液位1不变,选择相应的变送器、控制器、控制阀,并按左图组成单回反馈控制系统。
图1-1水槽图1-2水槽液位控制系统注:LC表示液位控制器,sp代表控制器的给定值。
假定控制阀为气闭,控制器为反作用。
偏差:测量信号与给定值之差。
当测量值大于给定值时,偏差为正,反之为负。
第一种情况(初始状态:平衡状态F1=F2 )入口阀突然开大一F1>F2 f Lf -正偏差f 输出减小f 控制阀t f F2 ff L |fF1=F2 f系统达到新的平衡入口阀突然开小f F1<F2 fL | f负偏差f输出增大f控制阀I f F2 1f L f f F1=F2 f系统达到新的平衡第二种情况初始状态:平衡状态F1=F2 )出口阀突然开大fF2>F1fL |f 负偏差f 输出增大f控制阀IfF2 1f Lff F1=F2 f系统达到新的平衡出口阀突然关小f F1>F2 f L f -正偏差f 输出减小f 控制阀t f F2 f f L | f F1=F2 f 系统达到新的平衡几点说明:(1)图中的各个信号值都是增量初始状态为零;图中箭头表示的是信号流向,而 不是物料或能量的流向。
(2)各环节的增益有正、负之别:控制器:正作用时增益为负”反作用时增益为正” 控制阀:气开阀增益为正” 气闭阀增益为负”变送器:一般为正”控制对象:根据操纵变量Q(S)的变化引起被控变量丫 (S)的变化来确定Q(S) ffY(S) f 增益为正”反之为负,上例中当控制阀装在出口处时,对象增益为 负”; 当控制阀装在人口处时,对象增益为正整个系统必须是一个负反馈系统,因此自R(S) 至X(S)的各个环节增益的乘积必须是正值。
了凡四训简单解释

了凡四训简介一、了凡四训的背景《了凡四训》是清代学者袁枚所著的一部训诂小说,于1791年完成。
该书以明代儒学家杨时为主角,通过他与一个名叫了凡的神仙的对话,传授人生智慧和修身养性之道。
二、了凡四训的内容《了凡四训》共分为四篇,每篇都有不同的主题和训诫。
下面将对每篇进行简要解释。
1. 第一篇:凡夫俗子第一篇主要讲述了人之凡夫俗子的局限和修身养性的重要性。
了凡神仙告诉杨时,凡夫俗子往往被欲望所驱使,追求名利和享乐,忽视了内心的修养和道德观念。
他们追求短暂的快乐,却忽略了长远的幸福。
因此,了凡神仙告诫杨时要修身养性,追求内心的宁静和道德的高尚。
2. 第二篇:情与性第二篇主要讲述了人之情与性的关系。
了凡神仙告诉杨时,情欲是人之本能,但过度的追求情欲会使人迷失自我,陷入痛苦和煎熬之中。
他指出,人应该控制自己的情欲,保持理智和节制,不被欲望所左右。
只有通过修身养性,才能真正实现内心的平静和幸福。
3. 第三篇:生死离别第三篇主要讲述了人生的生死离别和对待死亡的态度。
了凡神仙告诉杨时,生死是人生的必然经历,每个人都会面临死亡的时刻。
他强调,人应该对待生死平静而坦然,不应过分畏惧或追求永生。
只有当人真正面对死亡时,才能意识到生命的宝贵和珍贵。
因此,了凡神仙告诫杨时要珍惜生命,活在当下,不为过去和未来所困扰。
4. 第四篇:知与行第四篇主要讲述了知识和行为之间的关系。
了凡神仙告诉杨时,知识只有通过实践和行动才能变得有用。
他强调,人应该将所学的知识应用于实际生活中,通过实践来提升自己的修养和智慧。
只有通过实际行动,人才能真正理解和体验到知识的力量和价值。
三、了凡四训的意义《了凡四训》通过了凡神仙和杨时的对话,传达了修身养性的重要性,强调了人生的价值和意义。
它教导人们要追求内心的宁静和道德的高尚,控制情欲,对待生死平静而坦然,将知识与实践相结合。
这些教诲对于当代人来说仍然具有重要的启示和借鉴意义。
通过阅读《了凡四训》,人们可以反思自己的生活方式和价值观,找到自己内心的平静和幸福。
进度控制的方法措施
进度控制的方法措施第一篇:进度控制的方法措施进度控制的方法1、组织手段:落实进度控制的责任,建立进度控制协调制度。
2、技术手段:建立多级网络计划和施工作业计划体系;采用新工艺、新技术,缩短工艺过程时间和工序间的技术间歇时间。
3、经济手段:对工期提前者或按时完成节点工期实行奖励;对应急工程实行较高的计件单价;确保资金的及时供应等。
4、合同手段:按合同要求及时协调有关各方的进度,以确保项目形象进度。
5、其他预控手段:(1)以质量促进度,以安全保进度工程施工中由于质量而影响到进度的例子比比皆是,质量是进度的保证和基础。
从工序质量控制入手,对施工方法、工艺实施层层控制,把好工程质量关,避免返工或补强处理,避免附属设施因质量问题而影响投入和运行,有益于促进工程进度,没有质量就没有数量。
所以进行进度控制时绝对不能放松质量控制。
·督促承包商采取合适的施工方法与工艺,加快工程进度。
·加强混凝土的施工质量控制,以利于下阶段预制件等的安装,避免出现处理及返工现象,从而达到以质量促进度的目的。
·督促承包商加强现场施工安全管理,加大安全生产投入,以工程安全来保证工程进度。
(1)优化设计、简化施工,加快施工进度·优化设计、简化施工,不但能减少工程投资,还能加快施工进度,有利于保证质量和安全。
据进度计划审查施工组织设计中的原材料供应手段、拌和生产能力、运输设备、吊运设备及风、水、电的供应等是否满足生产高峰期的需要,以避免先天性的不足。
同时简化施工方案,尽可能采用较先进的、便于施工操作的技术和设备,以提高人员和设备效率,减少设备维修时间和成本,保证生产进度。
·发挥我公司搞监理的优势,与相关人员共同研究,在不影响工程等级、质量、安全、结构要求的前提下优化设计,减少工程量,简化方便施工,以加快工程进度。
(3)加强承包商之间的进度协调承包商在施工过程中于空间、时间、交叉作业等方面干扰较大。
电气控制PLC目录精选全文
可编辑修改精选全文完整版第一篇电气控制概述一、电气控制技术二、电气控制系统三、电气控制线路的实现四、电气控制技术的发展方向第1章常用低压电器引言一、电器二、电器的分类第1节接触器一、结构和工作原理二、接触器的图形、文字符号三、交、直流接触器特点四、技术参数五、接触器的选择六、实物照片第2节继电器概述一、电流、电压继电器二、中间继电器三、时间继电器四、热继电器五、速度继电器第3节熔断器一、工作原理二、分类及技术数据三、实物照片四、熔断器的选择五、图形、文字符号第4节低压隔离器引言一、刀开关二、组合开关第5节低压断路器第6节主令电器概述一、按钮二、行程开关三、凸轮控制器四、主令控制器第2章现代低压电器引言第1节低压电器产品的发展第2节电子电器和智能电器一、电子电器二、智能电器第3节接近开关概述一、光电开关二、电感式接近开关三、电容式接近开关四、超声波接近开关五、磁性接近开关第4节固态继电器一、概述二、结构三、分类四、工作原理五、特点六、技术参数第5节其它电子电器简介一、电子式软启动器二、变频器第6节现场总线简介概述1. 定义2. 优点3. 几种有影响的现场总线技术第3章电气图及电气控制线路分析第1节电气图的基本知识概述一、电气控制系统图中的图形符号和文字符号二、电气原理图三、元器件布置图四、电气接线图第2节电气控制线路分析基础一、电气控制线路分析的内容二、电气原理图阅读分析的方法第4章继电接触控制系统的基本控制规律第1节电动机控制的基本环节一、启动、停止控制线路二、点动控制线路三、多地控制线路四、可逆运行控制线路第2节按联锁控制的规律1. 联锁控制的定义2. 顺序工作的联锁控制第3节按控制过程的变化参量进行控制的规律概述一、时间原则控制二、速度原则控制三、电流原则控制第4节直流电动机的控制线路第二篇可编程序控制器第5章可编程序控制器的工作原理及组成第1节概述一、PLC的定义二、PLC的分类三、PLC的发展第2节PLC的基本结构和工作原理一、PLC的基本结构二、PLC的工作原理第3节PLC的技术指标、特点及应用一、PLC的基本技术指标二、PLC的特点三、PLC的应用领域第6章可编程序控制器的编程概述第1节可编程序控制器的编程语言一、梯形图编程语言二、指令语句编程语言三、功能图块编程语言四、高级语言第2节可编程序控制器的编程指导一、两个基本概念二、梯形图设计规则第7章OMRON公司CPMA系列小型机第1节CPM2A系列产品的类型和技术性能一、CPM2A的主要特点和功能二、CPM2A型的主机面板三、CPM2A机型的数据存储区分配第2节CPM2A指令系统一、基本术语二、基本指令第三篇电气控制系统设计第8章电气控制系统设计基础第1节PLC控制系统设计原则与设计内容一、PLC控制系统的设计原则二、PLC控制系统的设计内容第2节PLC控制系统设计举例一、时间控制二、顺序控制三、上料输送机PLC控制系统设计四、搅拌机控制。
过程控制-第一章
过程控制 二、建模的目的和要求
➢ 设计过程控制系统和整定调节器参数 ➢ 指导设计生产工艺设备 ➢ 进行仿真试验研究 ➢ 培训运行操纵人员 ,等等 要求: 准确可靠;但并不意味着愈准确愈好。 鲁棒性 实时性要求。往往需要做很多近似处理,比如线性化、 模型降阶处理等。
dh
A
R dt
hKuRu
令: A=C,容量系数 T=RC,时间常数 K=KuR,放大倍数
TdhhKu dt
对应的传递函数为:
G( s ) H( s ) K U( s ) Ts 1
过程控制
该对象对应的方框图:
过程控制
U(s)
Qi(s)
1
Ku
+-
Cs
Qo(s)
1
R
H(s)
G(s)H(s) KuC 1S KuR K U(s) 11 1 RCS1 Ts1 CSR
过程控制
Q1(s)
-
Q2(s)
H1(s)
1
1
c1s
R2
Q2(s)
1
- c2s
Q3(s)
1 R3
对象框图
过程控制
H2(s)111过程来自制G(s) H2(s)
C1s R2 C2s
Q1(s) 1 1 1 1 1 1 1 1 1
C1s R2 C2s R3 C1s R2 C2s R3
R3
C1R2s C2R3s C2R3s C1R2s 1
过程控制
1、 数学模型定义 被控过程的数学模型(动态特性),是指过程在各输入量 (包括控制量与扰动量)作用下,其相应输出量(被控量) 变化函数关系的数学表达式。
控制欲望议论文
控制欲望议论文理智控制欲望当一个不良的欲望涌上心头时,你将为其付出惨重的代价。
————题记上初中以来,我就一直想拥有一辆自行车。
每天上学,放学都骑着它在马路上飞奔着;逢到假期,骑一辆自行车在环山公路上与几个朋友一起竞速,是多么美丽的事呀!蹬一路飞旋的自行车,感受风的速度在耳边,任微风撩起秀美的黑发;沿着一路柳丝轻拂的公路,我潇洒地逃出喧闹的都市,一边哼着民歌,一边感受大自然的气息。
当自行车在绿油油的草地上,阳光和煦地洒在车上,使整辆车变得闪着金光。
这是多么令我向往的场景呀!于是,每天脑子里都想着自行车,课本上几乎每一页都画着自行车,每一笔都画得认真仔细。
老师上课画得几何图案,我都可能看作自行车组成的零件,老师讲得每一个字,我能听作自行车的奥秘。
自行车,充斥着我整个脑袋,甚至到无法自拔的程度。
有一次,我正在想着自己梦寐以求的自行车,这时,老师指着黑板的题目,大叫我的名字让我起来回答问题。
我慌忙地站起来,不知所措,望了黑板一会儿,望着老师一会儿,真不知道要干什么?老师看见我这样,满脸怒气说道:“上课不听讲,都上初二了,还这个样子,怎么行?把八年级管理公约抄3遍,听见没?”我听到这话,只好不情愿地答应了,下课后,拿出纸笔开始抄。
可想拥有自行车的这个欲望已占满了我的心头,我一边抄一边想着自己梦想中的自行车。
上课后,我还是想着自行车,想着自己带着头盔,手套,跨上自行车在马路上飞驰,别提有多开心,但我还是感觉到自己的解题速度已经大不如从前了,可是当有欲望怀在心时,任何思想都不可能打败他。
有一次考试,我还是想着自行车,结果成绩出来后,给了我一个大震慑,将我打醒,我才意识到这个欲望让我付出多大的代价。
每天上课开小差想着自行车,导致自己的成绩下滑到如此地步,我后悔。
当内心的欲望再次膨胀时,成绩或许更加差,不行,我得赶紧控制住他。
于是,我每天上课,不在想自行车,强迫着自己跟着老师的思想走,若思绪快要飞到九霄云外外,我就看看书,看看老师的板书,将思绪强制性拉回来,每天,上下学在想着自行车的模样,而回忆着老师讲过的题目;放假,我会看书,不会想着自己骑自行车奔弛的模样;渐渐地,我想有自行车的这个欲望已经被我压在心底,不在流露,每天全身心地投入进学习。
内部控制工作的经验做法及取得的成效[修改版]
![内部控制工作的经验做法及取得的成效[修改版]](https://img.taocdn.com/s3/m/99294ce8fad6195f302ba6d6.png)
第一篇:内部控制工作的经验做法及取得的成效随着我国财务体制改革的深入,建立完善的内部控制制度已势在必行。
本文分析了行政事业单位在基础建设中容易出现的漏洞、问题,对目前的内控制度进行了研究分析,提出了建立行政事业单位内部控制制度的具体措施。
为贯彻落实《财政部关于全面推进行政事业单位内部控制建设的指导意见》的有关精神,按照《财政部关于开展行政事业单位内部控制基础性评价工作的通知》要求,依据《行政事业单位内部控制规范(试行)》的有关规定,我们对本单位(部门)的内部控制基础情况进行了评价。
试图从建设中出现的问题、目前的控制制度以及设想以后比较完善的控制制度等几个方面来分析和解决问题。
一、我单位内部控制存在的问题1. 内部控制意识不强,执行力不够良好的内控意识是确保内控制度得以健全和实施的重要保证。
一些单位的领导缺乏内部会计控制理念,对建立健全单位内部控制的重要性和现实意义认识不够,不重视内部会计控制制度系统的建设,而简单地将财政的部门预算控制等同于内部控制。
有的单位虽建立了内控系统但不尽合理,生搬硬套,没有从自身实际情况出发。
还有些单位虽然建有较为完善的内部会计控制制度,但却流于形式,弱于执行。
2. 对内部会计控制的监控力度不够部分单位没有设立内部审计机构,内部会计控制的执行情况由内部会计控制执行部门自行监督检查,导致监控力度不够,影响了内部会计控制作用的发挥。
有些单位虽然设立了内部审计机构,但对内部审计工作没有给予足够的重视和支持,不能正确审计和鉴定会计资料和其他有关资料的正确性和真实性,主要原因在于内部审计人员不能认真履行内部审计的职责和权限,不能坚持内部审计的准则和原则,不能遵循内部审计的基本程序,不能正确运用审计方法,没有如实、公正地编写审计报告。
3.国有资产使用效率低下,流失比较严重单位内部部门之间对国有资产管理相互脱节,部分单位财务部门未建立固定资产明细账,每年只管经费收支,不管家底多少;后勤部门只管发放而不清楚资产价值和实物分布情况;使用部门只用不管。
简述控制的基本过程。

简述控制的基本过程
控制的基本过程包括三个主要环节:制定控制标准、衡量工作绩效、纠正偏差。
1. 制定控制标准:这是控制工作的首要环节,目的是为衡量工作绩效提供一个明确、可操作的标准。
控制标准通常来源于计划,管理者需要从整个计划和所有目标中挑选关键的指标,作为控制标准。
这些标准应该是具体的、可操作的,以便于实施控制。
2. 衡量工作绩效:在制定了控制标准之后,下一步是衡量实际工作绩效与控制标准的符合程度。
这个过程需要使用具体的、可衡量的指标来评估工作绩效。
评估结果可以提供关于工作进展的反馈,帮助管理者了解哪些地方需要改进或调整。
3. 纠正偏差:在衡量工作绩效之后,如果发现实际工作绩效与控制标准存在偏差,就需要采取措施进行纠正。
偏差可能是由于各种原因造成的,如资源不足、沟通不畅、技术问题等。
纠正偏差的目的是使实际工作重新回到控制标准所规定的范围之内,以确保组织目标的实现。
控制工作是一个持续的过程,需要不断地制定标准、衡量绩效和纠正偏差,以确保组织的稳定和持续发展。
控制计划范本3篇

控制计划范本控制计划范本第一篇:控制计划的概述和作用一、控制计划的概述控制计划是项目管理中的一个重要文件,它是规划阶段的重要产物之一。
通过控制计划,项目的管理团队可以识别和管理项目中的风险和变化,确保项目按时、按质地完成。
控制计划是对项目执行情况进行监督和对变化进行管理的工具,是实现成功的项目管理的关键。
二、控制计划的作用1、计划实现监控控制计划的主要目的是确定目标和计划,帮助项目在预算和时间方面保持在预期的范围内。
它可以帮助项目管理团队对项目的执行情况进行监督,以确保项目按计划进行。
由于大多数项目在执行的过程中会遇到一些问题和变化,控制计划可以帮助管理团队快速调整计划和执行方式,以便及时解决问题,确保项目成功完成。
2、规避风险控制计划还可以帮助团队预测项目中可能面临的风险,并在风险发生之前制定应对措施。
这种方法可以减少项目因意外情况出现的影响,并保证项目的顺利进行。
3、调整资源分配控制计划可以帮助管理团队对项目所需的人力资源、物力资源、时间资源等进行分配和调整。
由于项目执行的不可预测性,可能会导致一些资源需要进行扩大或缩小。
控制计划可以帮助团队有效地调整资源分配,以更好地适应实际执行情况。
4、对进度进行调整控制计划可以帮助团队对计划进度进行调整,以确保项目可以按时完成。
它可以帮助管理团队监督工作量和质量,并对项目进程进行有效的调整。
第二篇:制定控制计划的步骤一、确定计划的目标在制定控制计划之前,需要先确定计划的目标。
这个目标应该是基于项目的整体目标,并具备可测量性。
例如,在一个销售营销项目中,计划目标可能是提高总销售额10%,而这个目标可以通过对实际销售额进行比较来进行衡量。
二、识别和评估风险接下来,需要帮助团队确定可能出现的风险,并对这些风险进行评估。
风险评估可以帮助团队更好地理解可能出现的问题,并制定针对性的应对措施。
三、明确控制措施和标准根据风险评估的结果,需要确定项目的控制措施和标准。
流程控制的条件语句

流程控制的条件语句第一篇嘿,亲爱的小伙伴们!今天咱们来聊聊流程控制的条件语句。
你知道吗,这条件语句就像是个聪明的小管家,帮我们决定程序该怎么走。
比如说,当我们设定一个条件,像“如果今天是晴天,就出去玩耍”,这就是一个简单的条件语句。
要是条件满足了,那后面的操作就会被执行。
就像前面说的晴天,那我们就能开心地出去玩啦。
但要是条件不满足,比如说今天下雨,那可能就得换个计划,比如在家看看电影,睡个懒觉。
条件语句还能更复杂呢!可以有多个条件组合在一起,“如果今天是周末而且天气好,就去郊外野餐;如果只是周末但天气不好,就去商场逛街”。
而且哦,在写代码的时候,条件语句能让程序变得特别灵活,根据不同的情况做出不同的反应。
是不是很神奇呀?流程控制的条件语句就像是给程序装上了大脑,让它能根据各种情况做出聪明的选择,让我们的程序变得更加有趣和实用!第二篇宝子们,咱们来唠唠流程控制的条件语句哈!想象一下,条件语句就像是一道道关卡。
比如说,“如果你的考试成绩超过 90 分,就奖励自己一个冰淇淋”。
这里面“考试成绩超过 90 分”就是关卡条件,满足了就能得到冰淇淋这个奖励。
它能让程序变得特别机智。
比如说,在玩游戏的时候,“如果你的生命值低于 20%,就赶紧吃补血药”,这能保证咱们在游戏里不轻易挂掉。
还有哦,在做一些自动化的任务时,条件语句可好用啦。
“如果库存低于 10 件,就发送补货通知”,这样就能及时补充货物,不会出现缺货的情况。
有时候条件语句还能帮我们避免一些错误。
比如“如果输入的密码不正确,就提示重新输入”,是不是很贴心?反正呀,流程控制的条件语句就像是程序世界里的魔法棒,轻轻一挥,就能让程序按照我们的想法乖乖运行,简直太棒啦!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 t 1
- h1 τ dτ
G2 s 1 L h 2 t = 2 K 1 - G s s s
依次类推,可得到一个线性方程组:
K 0 = b0 K 1 = K 0 a1 - b 1 K 2 = K 1a1 - K 0a 2 + b 2 K r = K r-1a1 - K r-2a 2 + + -1 r = n+m
控制器
简单控制系统
广义被控对象
被调量
jω ω β -α σ
一般地,通过对控制器调节规律和参数选择,可以实 使得控制系统的闭环极点发生改变。在相同的衰减率下,振 荡频率越高则回复时间越短;而在相同的振荡频率下,衰减 率越大则回复时间越短。因此振荡频率也在一定程度上可作 为衡量控制快速性的一个指标
过程控制
过程控制
第一篇
简单控制系统
Ke-τs (3)确定 G(s) = (T s +1)(T s +1) , T1 T2 参数的两点方法 1 2
• 将响应曲线标幺并去掉纯迟延的到y*(t)
• 取y*(t1)=0.4,取y*(t2)=0.8,记t1和t2 若0.32<t1/t2≤0.46 ,则为二阶对象
(n > m)
h(t)是单位阶跃响应
又定义 h1 (t) K 0 - h τ dτ
0
t
则有:
G1 s 1 L h1 t 2 K 0 - G s s s
过程控制
第一篇
简单控制系统
1 K 1 lim h1 t lim G 1 s = K 0a1 - b1 t s 0 s
三、阶跃响应确定传递函数
1 阶跃响应获取应注意的问题 2 确定自衡对象传递函数 3 确定非自衡对象传递函数
过程控制
第一篇
简单控制系统
1 被控对象数学模型的表达形式
按系统的连续性划分:
连续系统模型
离散系统模型
时域表达 — 阶跃响应
按模型结构划分: 输入输出模型 状态空间模型
频域表达 — 传递函数
2 被控对象数学模型的利用方式
过程控制
第一篇
*
简单控制系统
Δμ0t Δμ0nT 渐近线方程: y (t) = Ta Ta
•当y*(t)=0时 ,记t=ta
有:ta=nT→ T=ta /n
•当t=0时,y*(t)=0h
Δμ 0nT 0h = Ta Δμ 0nT ta Ta = = Δμ 0 0h 0h
过程控制
第一篇
简单控制系统
Y
Y∞
• 取y*(t1)=0.39,取y*(t2)=0.63,记t1和t2
T = 2(t 2 - t1 ) τ = 2t1 - t 2
0.39
t
பைடு நூலகம்
Y*
0.63
1
t
• 取 t 3 = 0.8T + τ 验证 y * (t 3 ) = 0.55
t 4 = 2T + τ y * (t 4 ) = 0.87
t1 t2
G(s) = 1 -τs e Ts
τ
T
响应速度ε =
1 T
过程控制
第一篇
简单控制系统
三、工业过程动态特性的特点 无振荡
稳定或中性稳定 有惯性或迟延 非线性
过程控制
第一篇
简单控制系统
§1-3
过程数学模型及其建立方法
一、过程数学模型的表达形式与对模型的要求
二、建立数学模型的两个基本方法
机理建模法 测试建模法
离线方式:数学模型只是在进行控制系统时间或调试整定阶段中发挥作用 在线方式:数学模型作为一个组成部分嵌入控制系统中,具有实时性。
3 对被控对象数学模型的要求
一般不要求非常准确。闭环控制本身具有一定的鲁棒性。
过程控制
第一篇
简单控制系统
机理建模:
物质平衡方程 能量平衡方程 动量平衡方程 输入输出微分方程
2 积分指标用误差积分综合评价系统优劣;
3 根据具体生产过程的实际选用不同的指标; 4 通常将衰减率和积分指标结合,首先满足衰减率。
过程控制
给定值
第一篇
控制器
简单控制系统
广义被控对象
被调量
稳态
稳态
动态
过程控制
第一篇
简单控制系统
控制要求 安全性
评价指标 稳定性
经济性
稳定性
准确性
快速性
过程控制
第一篇
过程控制
第一篇
简单控制系统
2 确定自衡对象传递函数
一阶惯性环节
Ke-τs G(s) = Ts +1
τ
T
Ke-τs Ke-τs 或G(s) = 二阶或n阶惯性环节 G(s) = (T1s +1)(T2s +1) (Ts +1)n
用有理分式表示的传递函数
bmsm + + b1s + b0 -τs G(s) e n ans + + a1s + a0
表1-1 高阶对象中n与比值t1/t2的关系 n t1/t2 n t1/t2 1 0.317 8 0.684 2 0.46 9 0.699 3 0.534 10 0.712 4 0.584 11 0.724 5 0.618 12 0.734 6 0.640 13 0.748 7 0.666 14 0.751
简单控制系统
单项性能指标 给定+ y -y 衰减率: ψ= 控制器 y - y 超调量: σ= y 100%
1 3 1 1
广义对象
被调量
稳态误差: ess=y∞-r
调节时间: ts(进入稳态值5%范围内)
振荡频率:ω
r
y1
ess y3 y∞ ts
过程控制
第一篇
简单控制系统
单项性能指标
衰减率ψ : 反映了系统稳定性
K= y Δμ 0
T
τ 的作图法
Y
b
Y∞
τ
T
t
c
过程控制
第一篇
简单控制系统
Ke-τs (2)确定 G(s) = 参数的两点法 Ts + 1 y(t) * y t = • 将响应曲线标幺 y( )
0 y* t = t-τ 1- exp - T t<τ tτ
对被控对象的验前知识的掌握 对建立数学模型准确性的要求
(n > m)
选择哪种传递函数的形式,可依据以下两点:
K
典型自衡过程:
过程控制
第一篇
简单控制系统
Ke-τs (1)确定 G(s) = 参数 K Ts + 1
• t1/2处为扰动起点; • 在s型响应曲线找拐点,并作切线; • 记交点a、b和c • 起点到a的距离为τ; • a点到c点的距离为T;
简单控制系统
(2)双容水箱
对物质平衡方程在工作点处进行 线性化处理后达到传递函数为:
rk R1 H2 (s) G(s) = = μ(s) TT2 s 2 (T1 T2 )s (1- r ) 1
Q1
Qi
R1
H1
F1
其中:T1 F1R1
H2
F2
R2
, T2 F2 R2
,
Q2
R2 r R1 R2
β -α
σ
衰减率 阻尼系数
1
y3 y1
0 0
0.75 0.216 0.221
0.9 0.344 0.366
1 ≥1 ∞ 90º ∞ 不振荡
衰减指数 m tg
0 0
12º 28¹ 20º 6¹ 4 衰减 10 衰减
衰减比 系统振荡
n
y1 y3
1 等幅
过程控制
给定值
第一篇
过程控制
第一篇
简单控制系统
第一章
§1-1
生产过程动态特性
过程控制系统的性能指标
§1-2
§1-3
被控对象的动态特性
过程数学模型及其建立方法
过程控制
第一篇
简单控制系统
§1-1
过程控制系统的性能指标
一、单项性能指标
衰减率、超调量、稳态误差、调节时间
二、时间——积分指标 IE、IAE、ISE、ITAE 小结: 1 单项指标用若干特征参数评价系统优劣;
过程控制
第一篇
简单控制系统
§1-2
被控对象的动态特性
一、基本概念
被控对象的动态特性是指被控对象的输入发生变 化时,其输出(被调量)随时间变化的规律 。
对于线性系统,其动态特性可用传递函数来描述。 二、典型对象动态特性 1. 典型实例分析
过程控制
第一篇
简单控制系统 物质平衡方程:
dH 1 (Qi Q o ) dt F 其中Qi k , Qo k H
超调量σ : 反映了动态准确性
稳态误差ess: 反映了静态准确性
调节时间ts : 一般 对定值系统衰减率要求为75% 对随动系统衰减率要求为90% 反映了快速型 振荡频率ω:反映了快速型
过程控制
第一篇
简单控制系统
jω ω
y(t)
讨论: (对二阶系统)
r(t)
2 n G0 ( s ) s ( s 2 n )
t t - nT + Te T y * (t) + y 1 (t)
Δμ 0 = Ta
2 n-1 t n-2 t 1 t n + (n - 1) + ++ T 2! T (n - 1)! T