Mathematica程序 计算两线段之间的最短距离
两直线间的最短距离公式

两直线间的最短距离公式
两直线间的最短距离可以通过以下公式计算:
1.首先,我们需要了解两条直线的方程。
一条直线可以用斜截式方程来表示:
y = mx + b,其中m是斜率,b是y轴截距。
另一条直线可以用相同的
形式表示。
我们将这两个方程分别记为L1和L2。
2.接下来,我们需要找到两条直线的交点。
通过将L1和L2方程相等,并解
方程组,我们可以得到交点的坐标。
我们将交点的坐标记为(x0, y0)。
3.然后,我们可以使用点到直线的距离公式来计算最短距离。
点到直线的距
离可以用以下公式表示:d = |Ax + By + C| / sqrt(A^2 + B^2),其中(A,
B)是直线的法向量,C是直线的常数项。
对于L1和L2来说,我们可以将
其转化为以下形式:
•L1: Ax + By + C1 = 0
•L2: Ax + By + C2 = 0
4.将交点的坐标代入上述公式中,即将x0和y0代入A、B、C1和C2的值
中,然后计算得到的结果就是两条直线之间的最短距离。
请注意,如果两条直线是平行的,那么它们将没有交点。
在这种情况下,最短
距离就是两条直线之间的垂直距离,也就是其中一条直线到另一条直线的距离。
总结起来,两直线间的最短距离公式可以通过以下步骤计算:
1.找到两条直线的方程,记为L1和L2。
2.解方程组,找到两条直线的交点坐标(x0, y0)。
3.将交点的坐标代入点到直线的距离公式,计算出最短距离d。
这就是计算两直线间最短距离的公式及步骤。
希望能对你有所帮助!。
计算两点之间的最短距离

计算两点之间的最短距离题⽬链接:题⽬⼤意:给定N个点的坐标,找出距离最短的两个点的序号.如果最短距离相同,输出序号最⼩的⼀组.题⽬要求输出三种不同计算⽅式下的最短距离序号:欧⼏⾥得距离:Math.sqrt(|x2-x1|2+|y2-y1|2)曼哈顿距离:|x2-x1|+|y2-y1|棋盘距离:Math.max(|x2-x1|,|y2-y1|)因为N的个数是5000个,可以直接双重循环取得最⼩距离. 单纯的理解⼀下三种距离.Accept代码:import java.io.BufferedReader;import java.io.IOException;import java.io.InputStreamReader;import java.util.ArrayList;import java.util.List;import java.util.StringTokenizer;public class source {public static void main(String[] args) throws IOException {BufferedReader br = new BufferedReader(new InputStreamReader(System.in));StringTokenizer st = new StringTokenizer(br.readLine());int N = Integer.parseInt(st.nextToken());int[][] points = new int[N+1][2];for(int i = 1;i<=N;i++){st = new StringTokenizer(br.readLine());points[i] = new int[]{Integer.parseInt(st.nextToken()),Integer.parseInt(st.nextToken())};}List<int[]> result = getEuclidPosition(points);for(int[] ans:result){System.out.println(ans[0]+" "+ans[1]);}}private static List<int[]> getEuclidPosition(int[][] points){double minEuclidDistance = Integer.MAX_VALUE;int[] euclidPosition = new int[2];double minCityDistance = Integer.MAX_VALUE;int[] cityPosition = new int[2];double minChessDistance = Integer.MAX_VALUE;int[] chessPosition = new int[2];CalcMinPoint calcMinPointEuclid;CalcMinPoint calcMinPointCity;CalcMinPoint calcMinPointChess;for(int i = 1;i<points.length;i++){for(int j = 1;j<points.length;j++){if(i == j){continue;}double euclidDistance = getEuclidDistance(points[i],points[j]);double cityDistance = getCityDistance(points[i],points[j]);double chessDistance = getChessDistance(points[i],points[j]);calcMinPointEuclid = new CalcMinPoint(minEuclidDistance, euclidPosition, i, j, euclidDistance).invoke(); minEuclidDistance = calcMinPointEuclid.getMinEuclidDistance();euclidPosition = calcMinPointEuclid.getEuclidPosition();calcMinPointCity = new CalcMinPoint(minCityDistance, cityPosition, i, j, cityDistance).invoke(); minCityDistance = calcMinPointCity.getMinEuclidDistance();cityPosition = calcMinPointCity.getEuclidPosition();calcMinPointChess = new CalcMinPoint(minChessDistance, chessPosition, i, j, chessDistance).invoke(); minChessDistance = calcMinPointChess.getMinEuclidDistance();chessPosition = calcMinPointChess.getEuclidPosition();}}List<int[]> result = new ArrayList<int[]>();result.add(euclidPosition);result.add(cityPosition);result.add(chessPosition);return result;}private static double getChessDistance(int[] point, int[] point1) {return Math.max(Math.abs(point[0]-point1[0]),Math.abs(point[1]-point1[1]));}private static double getCityDistance(int[] point, int[] point1) {return Math.abs(point[0]-point1[0])+Math.abs(point[1]-point1[1]);}private static double getEuclidDistance(int[] p1, int[] p2){return Math.pow(p1[0]-p2[0],2)+Math.pow(p1[1]-p2[1],2);}private static class CalcMinPoint {private double minEuclidDistance;private int[] euclidPosition;private int i;private int j;private double euclidDistance;public CalcMinPoint(double minEuclidDistance, int[] euclidPosition, int i, int j, double euclidDistance) { this.minEuclidDistance = minEuclidDistance;this.euclidPosition = euclidPosition;this.i = i;this.j = j;this.euclidDistance = euclidDistance;}public double getMinEuclidDistance() {return minEuclidDistance;}public int[] getEuclidPosition() {return euclidPosition;}public CalcMinPoint invoke() {if(minEuclidDistance > euclidDistance){minEuclidDistance = euclidDistance;if(i < j){euclidPosition = new int[]{i,j};}else{euclidPosition = new int[]{j,i};}}else if(minEuclidDistance == euclidDistance){int position0 = -1;int position1 = -1;if(i<j){ position0 = i; position1 = j; } else{ position0 = j; position1 = i; } if(euclidPosition[0]>position0){ euclidPosition = new int[]{position0,position1};}else if(euclidPosition[0] == position0 && euclidPosition[1]>position1){euclidPosition = new int[]{position0,position1};}}return this;}}}。
两点之间线段最短的证明方法

两点之间线段最短的证明方法The shortest distance between two points is a fundamental theorem in geometry. 这是一个古老而基本的几何定理。
According to the theorem, the shortest distance between two points is a straight line. 根据定理,两点之间最短的距离是一条直线。
This concept is widely used in various fields such as engineering, architecture, and computer graphics. 这个概念被广泛应用于工程学、建筑学和计算机图形学等各个领域。
It is also crucial in navigation and transportation when finding the shortest route between two locations. 在导航和交通运输中,找出两个位置之间的最短路径也是非常关键的。
To prove that the shortest distance between two points is a straight line, we can use various mathematical methods. 为了证明两点之间的最短距离是一条直线,我们可以使用各种数学方法。
One approach is to use the Pythagorean theorem, which states that in a right-angled triangle, the square of the length of the hypotenuse is equal to the sum of the squares of the lengths of the other two sides. 一种方法是使用毕达哥拉斯定理,该定理规定在直角三角形中,斜边的长度的平方等于另外两条边长的平方之和。
最短路径算法matlab代码

最短路径算法matlab代码最短路径算法是计算两点之间最短路程的算法。
这个问题可以转化为图论中的最短路径问题,目前有多种解法,其中比较常用的就是迪杰斯特拉算法和弗洛伊德算法。
本文将以迪杰斯特拉算法为例,介绍一下最短路径算法的matlab实现。
迪杰斯特拉算法迪杰斯特拉算法是用来解决有向带权图中单源最短路径问题的一种贪心算法。
该算法通过维护一个距离集合,逐步扩展最短路径,直至到达终点或者所有路径均已扩展完毕。
具体算法流程如下:1. 初始化距离集合,将距离集合中除起点外所有点的距离设置为无穷大,将起点的距离设置为0。
2. 从距离集合中选择距离最小的点v,将v加入已扩展集合中。
3. 遍历v的所有邻居节点,将v到邻居节点的距离d与邻居节点原有的距离比较,若d小于原有距离,则将邻居节点的距离更新为d。
4. 重复以上步骤,直至所有点均已加入已扩展集合中。
matlab代码实现在matlab中实现迪杰斯特拉算法,需要用到矩阵来描述整个图。
用一个N*N的矩阵表示图中各节点之间的距离,例如:```G = [ 0, 4, 2, Inf, Inf;Inf, 0, 1, 5, Inf;Inf, Inf, 0, Inf, 3;Inf, Inf, Inf, 0, 1;Inf, Inf, Inf, Inf, 0 ];```其中Inf表示节点间没有连接。
然后,将距离集合D初始化为一个1*N 的向量,D(i)表示起点到节点i的距离。
对于起点,其距离应该为0。
```D = [0 Inf Inf Inf Inf];```接下来,用一个1*N的向量S来表示已经扩展过的节点。
一开始,S 中只有起点。
```S = [1];```接下来就可以实现算法了。
迭代遍历S中的所有节点,更新其邻居节点的距离,然后将距离最小的邻居节点加入S中。
具体实现代码如下:```for i = 1:N-1minDis = Inf;for j = 1:Nif ~ismember(j, S) % 如果节点j不在已扩展集合中if D(j) < minDisu = j;minDis = D(j);endendendS = [S u];for v = 1:Nif ~ismember(v, S) % 如果节点v不在已扩展集合中if G(u, v) ~= Inf % 如果u和v之间存在连接if D(u) + G(u, v) < D(v) % 如果从起点到u节点再到v节点的距离小于v原有距离D(v) = D(u) + G(u, v); % 更新v的距离endendendendend```完整代码将上述代码整合成一个函数,得到完整的matlab代码实现。
matlab中求最短路径的函数
matlab中求最短路径的函数在matlab中,有多种方法可以求解最短路径问题。
其中,较为常用的方法包括Dijkstra算法、Bellman-Ford算法和Floyd算法等。
这些方法对应的函数分别为dijkstra、bellmanford和floyd。
以下是这些函数的使用方法:1. dijkstra函数dijkstra函数可以求解带权有向图的单源最短路径问题。
其使用方法如下:[d,path] = dijkstra(W,s,t)其中,W为带权邻接矩阵,s为源节点,t为目标节点。
函数返回最短路径长度d和路径path。
例如,假设有以下带权有向图:W = [0 1 12 0;0 0 9 3;0 0 0 0;0 0 4 0];其中,0表示两节点之间没有边相连。
则可以使用以下代码求解1号节点到4号节点的最短路径:[d,path] = dijkstra(W,1,4)最短路径长度为7,路径为[1 2 4]。
2. bellmanford函数bellmanford函数可以求解带权有向图的单源最短路径问题,但是可以处理负权边。
其使用方法如下:[d,path] = bellmanford(W,s,t)其中,W为带权邻接矩阵,s为源节点,t为目标节点。
函数返回最短路径长度d和路径path。
例如,假设有以下带权有向图:W = [0 1 12 0;-4 0 9 3;0 0 0 0;0 0 4 0];其中,负权边被用负数表示。
则可以使用以下代码求解1号节点到4号节点的最短路径:[d,path] = bellmanford(W,1,4)最短路径长度为-1,路径为[1 2 4]。
3. floyd函数floyd函数可以求解带权有向图的所有节点之间的最短路径问题。
其使用方法如下:[D,path] = floyd(W)其中,W为带权邻接矩阵。
函数返回最短路径长度矩阵D和路径矩阵path。
例如,假设有以下带权有向图:W = [0 1 12 0;0 0 9 3;0 0 0 0;0 0 4 0];则可以使用以下代码求解所有节点之间的最短路径:[D,path] = floyd(W)最短路径长度矩阵为:D = [0 1 10 4;Inf 0 9 3;Inf Inf 0 Inf;Inf Inf 4 0];其中,Inf表示两节点之间不存在路径。
三维空间两直线线段最短距离线段计算算法

三维空间两直线线段最短距离线段计算算法三维空间中,线段是由两个端点确定的有限长度线段。
求解两个线段之间的最短距离是一个常见的问题,可以通过计算几何的方法来解决。
下面将介绍求解两条线段最短距离的算法。
算法思路:1.首先,我们需要确定两个线段的端点坐标。
2.利用端点坐标计算线段的向量表示。
3.计算两个线段向量之间的夹角。
4.如果夹角为零,即两个线段平行重合,那么最短距离为零。
如果夹角为180°,即两个线段共线但方向相反,那么最短距离为两线段之间的距离。
5.如果夹角为90°,即两个线段垂直交叉,那么最短距离为两线段端点距离的最小值。
6.对于其他夹角情况,我们需要在计算两线段端点距离的同时,计算两线段的垂直向量,并计算两线段之间的投影距离。
7.最终,两个线段的最短距离即为投影距离的最小值。
算法具体步骤:1.输入两个线段的端点坐标:A1,A2,B1,B22. 利用端点坐标计算线段的向量表示:vectorA = A2 - A1, vectorB = B2 - B13. 计算两个向量的模长:lengthA = ,vectorA,, lengthB = ,vectorB。
4. 判断两个向量是否共线:若vectorA与vectorB共线,则计算线段A和线段B之间的距离dist = ,A1 - B15. 若向量A与向量B不共线,则计算两个向量的夹角cosTheta = dot(vectorA, vectorB) / (lengthA * lengthB),其中dot表示点积运算。
6. 根据夹角cosTheta的值进行分类讨论:- 若cosTheta = 0,即夹角为90°,线段A和线段B垂直交叉。
计算两个线段的端点距离dist = ,A1 - B1- 若cosTheta = 1,即夹角为0°,线段A和线段B平行重合。
最短距离为零。
- 若cosTheta = -1,即夹角为180°,线段A和线段B平行但方向相反。
mathematica求函数最小值

mathematica求函数最小值在数学问题中,寻找一个函数的最小值是很常见的任务。
Mathematica是一个功能强大,易于使用的计算机代数系统,可以通过它来帮助我们求一个函数的最小值。
在这篇文章中,我们将介绍如何在Mathematica中求函数的最小值。
1. 求解标量函数最小值首先,我们考虑一个标量函数,这意味着它只有一个自变量和一个因变量。
假设我们要求解函数f(x) = x^2 - 2x + 1在x的最小值。
我们可以使用Mathematica内置的Minimize 函数来完成这项任务。
Minimize函数的第一个参数是要最小化的函数,第二个参数是限制条件(如果有的话)。
代码如下:Minimize[{x^2 - 2 x + 1, x <= 3, x >= -1}, x]输出:{1, {x -> 1}}我们可以看到,函数f(x)的最小值是1,当x等于1时达到。
这里的限制条件是使x 在区间[-1,3]内。
如果我们没有限制条件,我们可以这样写:从输出中可以看出,最小值仍然是1,最小值点是x等于1。
3. 求解无约束的最小值在某些情况下,不存在明显的限制条件,我们只需要通过最小化函数来寻找它的最小值。
我们可以使用FindMinimum函数来完成这项任务。
FindMinimum函数的第一个参数是要最小化的函数,第二个参数是指定变量的初始值。
假设我们要求解函数f(x) = x^3 + 4x^2 -3x - 4的最小值。
我们可以看到,函数f(x)的最小值是-4.58409,最小值点是x等于-1.34031。
在这个例子中,我们将x的初始值设置为0。
通常,FindMinimum函数需要一个比较好的初始值才能得到正确的结果。
4.使用约束条件的FindMinimum在某些情况下,我们需要寻找一个有约束的最小值。
这可以通过使用FindMinimum和约束函数来实现。
约束函数可以使用形式:g(x)=0{6.25, {x -> 1.66667, y -> 1.66667}}总结在Mathematica中,使用Minimize和FindMinimum函数可以帮助我们求一个函数的最小值。
matlab 点到线段最短距离
matlab 点到线段最短距离摘要:1.问题背景2.MATLAB 编程求解点到线段最短距离3.总结与拓展正文:1.问题背景在计算机图形学、机器人导航等领域,点到线段的最短距离是一个常见问题。
给定一个点P 和一条线段AB,求点P 到线段AB 的最短距离。
这个问题可以通过数学方法求解,也可以通过编程实现。
MATLAB 作为一种功能强大的数学软件,可以方便地实现点到线段最短距离的计算。
2.MATLAB 编程求解点到线段最短距离假设线段AB 的两个端点分别为A(x1, y1) 和B(x2, y2),点P 的坐标为P(x, y)。
我们可以通过以下步骤使用MATLAB 求解点到线段的最短距离:(1) 计算向量AB 和向量AP。
% 向量ABAB = [x2 - x1, y2 - y1];% 向量APAP = [x - x1, y - y1];(2) 计算向量AB 和向量AP 的点积。
% 点积dot_product = AB * AP;(3) 计算向量AB 的模长。
% 模长AB_magnitude = sqrt(AB(1)^2 + AB(2)^2);(4) 计算点到线段的最短距离。
% 最短距离min_distance = abs(dot_product) / AB_magnitude;(5) 输出结果。
fprintf("点P 到线段AB 的最短距离为:%f", min_distance);1.总结与拓展本文介绍了如何使用MATLAB 求解点到线段最短距离的问题。
通过计算向量的点积和模长,可以得到点到线段的最短距离。
MATLAB 具有丰富的函数和良好的图形界面,可以方便地解决各种数学问题。
在实际应用中,点到线段最短距离问题可能需要针对不同场景进行优化和拓展,如考虑线段的斜率、角度等参数。
matlab两点间最短路径
matlab两点间最短路径Matlab是一款基于高级编程语言的软件,适用于科学计算、数据分析和可视化等多个领域。
在Matlab中,求两点间最短路径可以使用多种算法实现,例如Dijkstra算法和Floyd算法等。
下面,我们针对最常见的Dijkstra算法进行介绍。
Dijkstra算法是一种基于贪心思想的单源最短路径算法,其具体步骤如下:1. 初始化:将起点到所有节点的距离都设为无穷大,将起点到自身的距离设为0。
2. 选择起点:从起点开始,首先将起点标记为“已访问”。
3. 更新距离:遍历起点可以到达的所有节点,计算起点到这些节点的距离,并更新距离数组。
如果通过起点到当前节点的距离比之前的更短,就更新距离数组。
4. 标记节点:从未标记为“已访问”的节点中,选择距离起点最近的节点,并将其标记为“已访问”。
5. 重复以上步骤:重复以上步骤,直到所有节点都被标记为“已访问”,或者到达目标节点为止。
6. 回溯路径:最后,根据更新的距离数组和前驱节点数组,可以回溯出起点到目标点的最短路径。
在Matlab中,可以使用以下代码实现Dijkstra算法:```matlabfunction [dist,prev] = dijkstra(adj,start)n = size(adj,1);dist = inf(1,n);prev = zeros(1,n);visited = zeros(1,n);dist(start) = 0;for i=1:n[mindist,index] = min(dist);if (mindist == inf)break;endvisited(index) = 1;for j=1:nif (visited(j) == 0 && adj(index,j) ~= inf)newdist = mindist + adj(index,j);if (newdist < dist(j))dist(j) = newdist;prev(j) = index;endendendendend```其中,adj为节点之间的邻接矩阵,start为起点位置,dist为从起点到各点的最短距离数组,prev为各点的前驱节点数组。
matlab 点到线段最短距离
matlab 点到线段最短距离在MATLAB中,我们可以使用不同的方法来计算点到线段的最短距离。
这篇文章将一步一步地回答如何在MATLAB中实现这个任务。
1. 首先,我们需要明确问题。
我们要计算的是点到线段的最短距离,其中线段由两个点定义。
我们可以将这个问题分解为两部分:点到直线的最短距离和点到线段端点的最短距离。
2. 对于点到直线的最短距离,我们可以使用向量的方法来实现。
给定一个直线,可以使用两点坐标表示为(x1, y1)和(x2, y2)。
我们还需要一个额外的点的坐标(xp, yp),代表我们要计算最短距离的点。
我们可以使用向量的投影来计算最短距离。
首先,我们需要计算直线的方向向量V和一个指向目标点的向量W。
V = [x2x1, y2y1]W = [xpx1, ypy1]然后,我们将向量W投影到向量V上,得到向量P。
W_proj_V = dot(W, V) / dot(V, V)P = W_proj_V * V最后,我们可以计算点到直线的最短距离d。
d = norm(P W)在MATLAB中,我们可以以以下方式实现这个计算:matlabfunction d = point_to_line_distance(x1, y1, x2, y2, xp, yp)V = [x2x1, y2y1];W = [xpx1, ypy1];W_proj_V = dot(W, V) / dot(V, V);P = W_proj_V * V;d = norm(P W);end3. 对于点到线段端点的最短距离,我们可以使用向量的长度来计算。
我们需要计算点到线段两个端点的距离,然后选取最小值作为最短距离。
我们可以使用以下公式来计算点到端点的距离:d1 = norm([xp x1, yp y1])d2 = norm([xp x2, yp y2])d = min(d1, d2)在MATLAB中,我们可以编写一个函数来计算点到线段端点的最短距离:matlabfunction d = point_to_endpoints_distance(x1, y1, x2, y2, xp, yp) d1 = norm([xp x1, yp y1]);d2 = norm([xp x2, yp y2]);d = min(d1, d2);end4. 现在,我们可以将这两个函数组合起来,以计算点到线段的最短距离。
Mathematica程序 计算两线段之间的最短距离
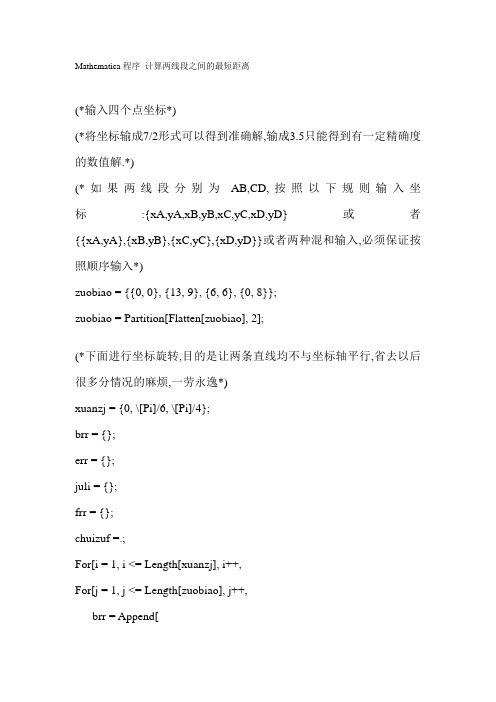
Mathematica程序计算两线段之间的最短距离(*输入四个点坐标*)(*将坐标输成7/2形式可以得到准确解,输成3.5只能得到有一定精确度的数值解.*)(*如果两线段分别为AB,CD,按照以下规则输入坐标:{xA,yA,xB,yB,xC,yC,xD,yD}或者{{xA,yA},{xB,yB},{xC,yC},{xD,yD}}或者两种混和输入,必须保证按照顺序输入*)zuobiao = {{0, 0}, {13, 9}, {6, 6}, {0, 8}};zuobiao = Partition[Flatten[zuobiao], 2];(*下面进行坐标旋转,目的是让两条直线均不与坐标轴平行,省去以后很多分情况的麻烦,一劳永逸*)xuanzj = {0, \[Pi]/6, \[Pi]/4};brr = {};err = {};juli = {};frr = {};chuizuf =.;For[i = 1, i <= Length[xuanzj], i++,For[j = 1, j <= Length[zuobiao], j++,brr = Append[brr, {zuobiao[[j]][[1]]*Cos[xuanzj[[i]]] +zuobiao[[j]][[2]]*Sin[xuanzj[[i]]], -zuobiao[[j]][[1]]*Sin[xuanzj[[i]]] + zuobiao[[j]][[2]]*Cos[xuanzj[[i]]]}];];If[brr[[1]][[1]] != brr[[2]][[1]] &&brr[[3]][[1]] != brr[[4]][[1]] && brr[[1]][[2]] != brr[[2]][[2]] && brr[[3]][[2]] != brr[[4]][[2]],\[Alpha] = -xuanzj[[i]];Break[],brr = {}];];(*下面判断两直线是否平行*)pingxing =.;If[(zuobiao[[1]][[1]] - zuobiao[[2]][[1]])*(zuobiao[[3]][[2]] -zuobiao[[4]][[2]]) == (zuobiao[[1]][[2]] -zuobiao[[2]][[2]])*(zuobiao[[3]][[1]] - zuobiao[[4]][[1]]),If[(zuobiao[[1]][[1]] - zuobiao[[3]][[1]])*(zuobiao[[3]][[2]] -zuobiao[[4]][[2]]) == (zuobiao[[1]][[2]] -zuobiao[[3]][[2]])*(zuobiao[[3]][[1]] - zuobiao[[4]][[1]]), pingxing = 2(*直线重合*),pingxing = 1(*直线平行*)],pingxing = 0(*直线相交*)];(*下面是两直线重合时,先判断两条线段是否有重合部分,再计算距离*)If[pingxing == 2,drr = Transpose[brr];If[Partition[Sort[drr[[1]], Less],2] == {Sort[{drr[[1]][[1]], drr[[1]][[2]]}, Less],Sort[{drr[[1]][[3]], drr[[1]][[4]]}, Less]} ||Partition[Sort[drr[[1]], Less],2] == {Sort[{drr[[1]][[3]], drr[[1]][[4]]}, Less],Sort[{drr[[1]][[1]], drr[[1]][[2]]}, Less]},juli = Simplify[Norm[{Sort[drr[[1]], Less][[2]] - Sort[drr[[1]], Less][[3]],Sort[drr[[2]], Less][[2]] - Sort[drr[[2]], Less][[3]]}]];frr = {{{Sort[drr[[1]], Less][[2]],Sort[drr[[2]], Less][[2]]}, {Sort[drr[[1]], Less][[3]],Sort[drr[[2]], Less][[3]]}}};Print["准确解"];Print[juli];Print["数值解"];Print[juli // N],Print["两线段有一部分重合,距离为0"]]](*下面是两直线相交时,先计算两直线交点坐标,再判断两条线段是否相交*)(*下面定义一个函数jiaodian,用来计算两直线交点坐标*)jiaodian[zuobiao_] :=Module[{arr},arr = Flatten[zuobiao];{-(-arr[[3]] arr[[5]] arr[[2]] + arr[[3]] arr[[7]] arr[[2]] +arr[[1]] arr[[5]] arr[[4]] - arr[[1]] arr[[7]] arr[[4]] +arr[[1]] arr[[7]] arr[[6]] - arr[[3]] arr[[7]] arr[[6]] -arr[[1]] arr[[5]] arr[[8]] +arr[[3]] arr[[5]] arr[[8]])/(arr[[5]] arr[[2]] -arr[[7]] arr[[2]] - arr[[5]] arr[[4]] + arr[[7]] arr[[4]] -arr[[1]] arr[[6]] + arr[[3]] arr[[6]] + arr[[1]] arr[[8]] -arr[[3]] arr[[8]]), -(-arr[[3]] arr[[2]] arr[[6]] +arr[[7]] arr[[2]] arr[[6]] + arr[[1]] arr[[4]] arr[[6]] -arr[[7]] arr[[4]] arr[[6]] + arr[[3]] arr[[2]] arr[[8]] -arr[[5]] arr[[2]] arr[[8]] - arr[[1]] arr[[4]] arr[[8]] +arr[[5]] arr[[4]] arr[[8]])/(arr[[5]] arr[[2]] -arr[[7]] arr[[2]] - arr[[5]] arr[[4]] + arr[[7]] arr[[4]] -arr[[1]] arr[[6]] + arr[[3]] arr[[6]] + arr[[1]] arr[[8]] -arr[[3]] arr[[8]])}];(*下面是两直线相交时,先计算两直线交点坐标,再判断两线段是否相交,如果相交,输出"两线段相交,最短距离为0",否则继续接着的步骤*) xiangjiao =.;If[pingxing == 0,brr = Append[brr, jiaodian[brr]];(*计算两直线交点坐标*)If[(brr[[1]][[1]] - brr[[5]][[1]])*(brr[[5]][[1]] - brr[[2]][[1]]) >=0 && (brr[[3]][[1]] - brr[[5]][[1]])*(brr[[5]][[1]] -brr[[4]][[1]]) >= 0,Print["两线段相交,最短距离为0"];xiangjiao = 1,xiangjiao = 0];];(*下面先定义一个函数chuizu,用来计算点到直线的垂足坐标*) chuizu[zuobiao_] :=Module[{arr},arr = Flatten[zuobiao];{-(-arr[[1]] arr[[3]]^2 + 2 arr[[1]] arr[[3]] arr[[5]] -arr[[1]] arr[[5]]^2 - arr[[3]] arr[[2]] arr[[4]] +arr[[5]] arr[[2]] arr[[4]] - arr[[5]] arr[[4]]^2 +arr[[3]] arr[[2]] arr[[6]] - arr[[5]] arr[[2]] arr[[6]] +arr[[3]] arr[[4]] arr[[6]] + arr[[5]] arr[[4]] arr[[6]] -arr[[3]] arr[[6]]^2)/(arr[[3]]^2 - 2 arr[[3]] arr[[5]] +arr[[5]]^2 + arr[[4]]^2 - 2 arr[[4]] arr[[6]] +arr[[6]]^2), -(-arr[[1]] arr[[3]] arr[[4]] +arr[[1]] arr[[5]] arr[[4]] + arr[[3]] arr[[5]] arr[[4]] -arr[[5]]^2 arr[[4]] - arr[[2]] arr[[4]]^2 +arr[[1]] arr[[3]] arr[[6]] - arr[[3]]^2 arr[[6]] -arr[[1]] arr[[5]] arr[[6]] + arr[[3]] arr[[5]] arr[[6]] +2 arr[[2]] arr[[4]] arr[[6]] -arr[[2]] arr[[6]]^2)/(arr[[3]]^2 - 2 arr[[3]] arr[[5]] +arr[[5]]^2 + arr[[4]]^2 - 2 arr[[4]] arr[[6]] + arr[[6]]^2)} ];(*下面是两线段线不相交时,计算各个端点到所对线段的最短距离*) crr = {{brr[[1]], brr[[3]], brr[[4]]}, {brr[[2]], brr[[3]],brr[[4]]}, {brr[[3]], brr[[1]], brr[[2]]}, {brr[[4]], brr[[1]],brr[[2]]}};If[xiangjiao == 0,For[i = 1, i <= 4, i++,chuizuf = chuizu[crr[[i]]];If[(crr[[i]][[2]][[1]] - chuizuf[[1]])/(crr[[i]][[2]][[1]] -crr[[i]][[3]][[1]]) >=0 && (crr[[i]][[3]][[1]] - chuizuf[[1]])/(crr[[i]][[3]][[1]] -crr[[i]][[2]][[1]]) >= 0,frr = Append[frr, {crr[[i]][[1]], chuizuf}];juli =Append[juli, Simplify[Norm[crr[[i]][[1]] - chuizuf]]](*A的垂足F 在CD内,取线段AF距离*)];If[(crr[[i]][[2]][[1]] - chuizuf[[1]])/(crr[[i]][[2]][[1]] -crr[[i]][[3]][[1]]) <0 && (crr[[i]][[3]][[1]] - chuizuf[[1]])/(crr[[i]][[3]][[1]] -crr[[i]][[2]][[1]]) >= 0,frr = Append[frr, {crr[[i]][[1]], crr[[i]][[2]]}];juli =Append[juli,Simplify[Norm[crr[[i]][[1]] - crr[[i]][[2]]]]](*A的垂足F在C的外侧,取线段AC距离*)];If[(crr[[i]][[2]][[1]] - chuizuf[[1]])/(crr[[i]][[2]][[1]] -crr[[i]][[3]][[1]]) >=0 && (crr[[i]][[3]][[1]] - chuizuf[[1]])/(crr[[i]][[3]][[1]] -crr[[i]][[2]][[1]]) < 0,frr = Append[frr, {crr[[i]][[1]], crr[[i]][[3]]}];juli =Append[juli,Simplify[Norm[crr[[i]][[1]] - crr[[i]][[3]]]]](*A的垂足F在D的外侧,取线段AD距离*)];];Print["准确解"];Print[Sort[juli, Less][[1]]];Print["数值解"];Print[Sort[juli // N][[1]]];];(*下面是作图*)For[j = 1, j <= Length[brr], j++,err = Append[err, {brr[[j]][[1]]*Cos[\[Alpha]] +brr[[j]][[2]]*Sin[\[Alpha]], -brr[[j]][[1]]*Sin[\[Alpha]] +brr[[j]][[2]]*Cos[\[Alpha]]}];];err = Partition[err, 2];If[frr != {},grr = Table[Norm[frr[[i]][[1]] - frr[[i]][[2]]] // N, {i, 1, Length[frr]}];For[i = 1, i <= Length[grr], i++,If[grr[[i]] < grr[[1]],grr[[1]] = grr[[i]];frr[[1]] = frr[[i]]]];err = Append[err, frr[[1]]];];Print["下图中蓝色为已知的两条直线,红色为连接两条已知线段的最短线段"];ListLinePlot[err, AspectRatio -> Automatic,PlotStyle -> {Blue, Blue, Red}, AxesOrigin -> {0, 0},PlotRange -> All]。
空间两曲线的最短距离matlab

一、概述空间两曲线的最短距离在计算机图形学和数学建模中是一个重要的问题,也是一个具有挑战性的数学问题。
在实际应用中,我们经常面临着需要计算两条曲线之间最短距离的情况,比如在医学图像处理中,需要计算血管管道之间的最短距离;在工程设计中,需要计算两个机械零件之间的最短距离等等。
研究和求解空间两曲线的最短距离对于实际问题具有重要意义。
为了解决这一问题,我们可以利用Matlab 这一强大的数学建模工具来进行计算和求解。
二、空间两曲线的最短距离定义我们需要明确什么是空间中两条曲线的最短距离。
假设有两条曲线L1和L2,它们分别由参数方程R1(t)和R2(s)表示,我们需要找到使得点R1(t1)和R2(s2)之间的欧氏距离最小的参数t1和s2。
这个最小的欧氏距离就是曲线L1和L2之间的最短距离。
三、Matlab求解空间两曲线的最短距离在Matlab中,我们可以利用数值计算和数值优化的相关工具来求解空间两曲线的最短距离。
具体步骤如下:1. 定义两条曲线的参数方程我们需要定义两条曲线的参数方程R1(t)和R2(s),其中t和s是曲线上的参数。
这可以通过Matlab中的符号计算工具来实现,具体可以使用syms命令定义变量和函数。
2. 定义距离函数接下来,我们需要定义点R1(t)和R2(s)之间的欧氏距离为一个关于t和s的函数D(t,s),即D(t,s) = ||R1(t) - R2(s)||,其中||.||表示欧氏范数。
我们可以利用Matlab中的符号计算工具来定义这个函数,并对其进行数值计算。
3. 求解最短距离我们可以利用Matlab中的数值优化工具来求解距离函数D(t,s)的最小值。
具体可以使用fmincon命令来进行约束优化,找到使得D(t,s)最小的参数t1和s2,从而得到曲线L1和L2之间的最短距离。
四、实例分析为了进一步说明Matlab求解空间两曲线的最短距禿方法,我们以求解球面上两条大圆的最短距离为例进行分析。
matlab 点到线段最短距离
matlab 点到线段最短距离(原创版)目录一、引言二、点到线段的距离计算方法1.计算点到线段的垂足2.计算点到线段的两个端点的距离3.计算最短距离三、MATLAB 实现点到线段最短距离的函数四、结论正文一、引言在几何学中,点到线段的距离问题是一个基本问题。
在 MATLAB 中,我们可以通过编程实现点到线段的最短距离的计算。
本文将从点到线段的距离计算方法入手,介绍如何在 MATLAB 中实现点到线段最短距离的函数,并举例说明其应用。
二、点到线段的距离计算方法点到线段的距离计算方法可以分为以下几个步骤:1.计算点到线段的垂足:假设点 P(x0, y0, z0) 到线段 AB 的两个端点 A(x1, y1, z1) 和 B(x2, y2, z2),首先我们需要计算点 P 到线段 AB 的垂足 H。
可以通过计算向量 PA 和向量 PB 的点积来找到垂足H,公式为:HP·AB = 0,其中 AB = (x2 - x1, y2 - y1, z2 - z1) 是线段 AB 的方向向量。
解这个方程组,可以得到垂足 H 的坐标。
2.计算点到线段的两个端点的距离:计算点 P 到线段 AB 的两个端点 A 和 B 的距离,分别为 PA 和 PB。
3.计算最短距离:最短距离就是 PA 和 PB 中的较小值。
三、MATLAB 实现点到线段最短距离的函数在 MATLAB 中,我们可以通过编写一个函数来实现点到线段最短距离的计算。
以下是一个简单的示例:```matlabfunction dist = pointToLineSegment(P, A, B)% P: 点的坐标 (x0, y0, z0)% A: 线段的一个端点的坐标 (x1, y1, z1)% B: 线段的另一个端点的坐标 (x2, y2, z2)% 计算向量PA = P - A;PB = P - B;% 计算点到线段的两个端点的距离PA_norm = norm(PA);PB_norm = norm(PB);% 计算最短距离dist = min(PA_norm, PB_norm);end```四、结论通过以上分析和示例,我们可以看到在 MATLAB 中,可以通过编写函数实现点到线段最短距离的计算。
matlab计算两个区域的最小距离函数

一、概述MATLAB是一种流行的数学软件,用于进行数值计算和数据可视化。
在许多科学和工程领域,MATLAB都被广泛地应用。
其中一个非常有用的功能就是计算两个区域的最小距离函数。
这个功能在图像处理、计算几何学和机器人学等领域都有着广泛的应用。
二、MATLAB中的最小距离函数在MATLAB中,可以使用内置函数或编写自定义函数来计算两个区域的最小距离。
下面我们将介绍MATLAB中计算最小距离的几种常见方法。
1. 使用内置函数MATLAB提供了一些内置函数来计算两个区域之间的最小距离,比如pdist2函数和bwdist函数。
pdist2函数可以用来计算两个不同数据集之间的距离,而bwdist函数则可以计算二进制图像中每个像素到最近的非零像素的距离。
这两个函数都是非常高效、准确的计算最小距离的工具。
2. 编写自定义函数除了使用内置函数,我们还可以编写自定义函数来计算两个区域的最小距离。
这种方法可以根据具体的问题需求进行灵活的定制,但是需要一定的编程能力。
通常可以使用广度优先搜索、最短路径算法或者动态规划等方法来编写自定义函数。
三、最小距离函数的应用最小距离函数在许多领域都有着重要的应用。
下面将介绍一些常见的应用场景。
1. 图像处理在图像处理中,最小距离函数可以用来计算图像中不同物体或区域之间的距离。
比如在医学图像中,可以用最小距离函数来计算肿瘤与周围组织的距离,以辅助医生进行诊断。
2. 计算几何学在计算几何学中,最小距离函数可以用来计算两个几何体之间的最短距离,比如计算两个多边形之间的最小距离。
这对于设计和制造工程师来说是非常重要的。
3. 机器人学在机器人学中,最小距离函数可以用来规划机器人的路径,以避免障碍物或与其他机器人发生碰撞。
这对于自动驾驶车辆和工业机器人来说有着重要的意义。
四、总结在MATLAB中,计算两个区域的最小距离函数是非常有用的功能,它可以用来解决许多现实生活中的问题。
通过内置函数或编写自定义函数,我们可以轻松地实现这一功能。
三维空间中两个线段的最小距离算法 用向量的方式
三维空间中两个线段的最小距离算法用向量的方式在三维空间中,两个线段的最小距离可以通过向量的方式进行计算。
首先,我们需要定义两个线段,每个线段可以用两个点来表示。
假设线段AB和线段CD是我们要计算最小距离的线段。
步骤1:计算两个线段的方向向量首先,我们可以计算线段AB的方向向量和线段CD的方向向量。
方向向量可以通过线段的两个点之间的差来计算:向量AB = B - A向量CD = D - C步骤2:计算两个线段上一点到另一线段的向量我们可以选择线段AB上的一点P,并且计算向量PC = C - P。
同样地,我们可以选择线段CD上的一点Q,并且计算向量QA = A - Q。
步骤3:计算两个线段的最小距离最小距离可以通过将两个线段的方向向量与两个线段上的点到另一线段的向量进行组合来计算。
具体计算方法如下:-计算AB和CD的垂直向量计算向量n = AB × CD的叉乘。
(×表示向量的叉乘)。
这个向量垂直于AB和CD,且具有长度。
-计算线段AB上的一点P到CD上的投影计算向量v = PC · n / (AB · n)的数量积。
(·表示向量的数量积)这个向量是点P到线段CD的投影向量。
-计算线段CD上的一点Q到AB上的投影计算向量u = QA · n / (CD · n)的数量积。
这个向量是点Q到线段AB的投影向量。
-计算最小距离最小距离可以通过将线段AB上的点坐标P与线段CD上的点坐标Q 进行组合计算:最小距离= ||P + v · AB - Q - u · CD||的长度。
(||表示向量的长度)步骤4:判定两个线段是否相交如果最小距离为0,则说明两个线段相交。
因此,我们还需要进行这一步骤的判断。
综上所述,以上就是计算三维空间中两个线段最小距离的算法流程。
这种算法通过将线段投影到垂直于两个线段的向量上,并计算向量投影的数量积,能够准确地计算得到两个线段之间的最小距离。
三维空间中两个线段的最小距离算法 用向量的方式

三维空间中两个线段的最小距离算法用向量的方式题目:三维空间中两个线段的最小距离算法用向量的方式摘要:在三维空间中,计算两个线段之间的最小距离是一个常见的问题,涉及到计算几何和向量运算。
本文将介绍一个基于向量的算法,用于计算三维空间中两个线段之间的最小距离。
文章分为以下几个部分:引言、问题陈述、算法设计、算法实现、算法分析和实例应用。
一、引言在计算机图形学、虚拟现实和机器人导航等领域,计算几何问题是非常重要的。
其中,计算三维空间中两个线段之间的最小距离被广泛应用于物体碰撞检测、路径规划等任务中。
本文将探讨如何利用向量的方式来解决这一问题。
二、问题陈述给定两个线段AB和CD,线段AB由起点A和终点B表示,线段CD由起点C和终点D表示。
我们的目标是计算线段AB和CD之间的最小距离。
三、算法设计1. 初始化最小距离min_dist为正无穷大。
2. 分别计算向量AC、AD、BC和BD。
3. 计算线段AB和向量AC、AD的点积,如果点积小于等于0,则最近距离点为A 或C。
4. 计算线段AB和向量BC、BD的点积,如果点积小于等于0,则最近距离点为B 或D。
5. 如果最近距离点为A或C,计算点A到CD的距离。
6. 如果最近距离点为B或D,计算点B到CD的距离。
7. 更新最小距离min_dist。
四、算法实现具体实现过程中,可以使用向量库提供的函数来计算点积和距离。
伪代码如下:min_dist = +∞AC = C AAD = D ABC = C BBD = D Bif dot(AB, AC) <= 0:min_dist = min(min_dist, distance(A, CD))if dot(AB, AD) <= 0:min_dist = min(min_dist, distance(A, CD))if dot(BC, AB) <= 0:min_dist = min(min_dist, distance(B, CD))if dot(BC, BD) <= 0:min_dist = min(min_dist, distance(B, CD))return min_dist五、算法分析该算法的时间复杂度为O(1),空间复杂度为O(1)。
数学建模最短路径问题

数学建模最短路径问题
在数学建模中,求解最短路径问题是一个经典的问题。
在一个有向、加权图中,最短路径指的是从起点到终点路径上的各边权值之和最小的路径。
下面介绍两种常用的最短路径求解方法:
Dijkstra算法
Dijkstra算法是一种基于贪心策略的单源最短路径算法。
它的基本思想是从起点开始,不断扩展到其他结点,每次选择当前路径中距离最小的结点进行扩展。
具体步骤如下:
初始化距离数组dist[]为正无穷,起点距离设为0;
将起点加入集合S;
重复以下过程,直到所有结点都被加入集合S:
在非S中的结点中选择距离起点最近的结点w,并将它加入集合S;
对S中结点可以直接到达的结点v,更新它们的距离dist[v]为min{dist[v], dist[w]+边(w,v)的权值}。
Floyd算法
Floyd算法是一种多源最短路径算法,它通过动态规划的方式求解任意两个结点之间的最短路径。
具体步骤如下:
初始化距离矩阵D,如果结点i和结点j有边相连,则D[i,j]为边的权值,否则为正无穷;
三重循环求解任意两个结点之间的最短路径:
对于每对结点i和结点j,考虑是否经过中间结点k可以获得更短的路径。
即D[i,j] = min{D[i,j], D[i,k]+D[k,j]}。
最后得到的距离矩阵D即为任意两个结点之间的最短路径长度。
matlab 最短路距离
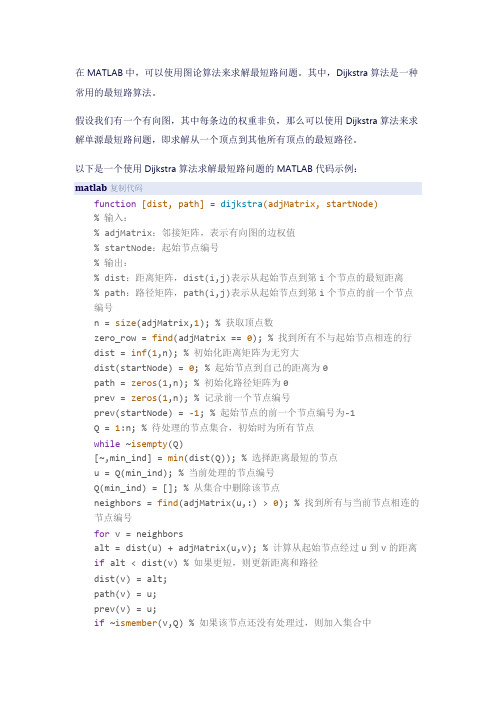
在MATLAB中,可以使用图论算法来求解最短路问题。
其中,Dijkstra算法是一种常用的最短路算法。
假设我们有一个有向图,其中每条边的权重非负,那么可以使用Dijkstra算法来求解单源最短路问题,即求解从一个顶点到其他所有顶点的最短路径。
以下是一个使用Dijkstra算法求解最短路问题的MATLAB代码示例:matlab复制代码function[dist, path] = dijkstra(adjMatrix, startNode)% 输入:% adjMatrix:邻接矩阵,表示有向图的边权值% startNode:起始节点编号% 输出:% dist:距离矩阵,dist(i,j)表示从起始节点到第i个节点的最短距离% path:路径矩阵,path(i,j)表示从起始节点到第i个节点的前一个节点编号n = size(adjMatrix,1); % 获取顶点数zero_row = find(adjMatrix == 0); % 找到所有不与起始节点相连的行dist = inf(1,n); % 初始化距离矩阵为无穷大dist(startNode) = 0; % 起始节点到自己的距离为0path = zeros(1,n); % 初始化路径矩阵为0prev = zeros(1,n); % 记录前一个节点编号prev(startNode) = -1; % 起始节点的前一个节点编号为-1Q = 1:n; % 待处理的节点集合,初始时为所有节点while ~isempty(Q)[~,min_ind] = min(dist(Q)); % 选择距离最短的节点u = Q(min_ind); % 当前处理的节点编号Q(min_ind) = []; % 从集合中删除该节点neighbors = find(adjMatrix(u,:) > 0); % 找到所有与当前节点相连的节点编号for v = neighborsalt = dist(u) + adjMatrix(u,v); % 计算从起始节点经过u到v的距离if alt < dist(v) % 如果更短,则更新距离和路径dist(v) = alt;path(v) = u;prev(v) = u;if ~ismember(v,Q) % 如果该节点还没有处理过,则加入集合中Q = [Q v]; endendendend。
matlab两点间最短路径
matlab两点间最短路径在现代科技的发展中,人们对于两点间最短路径的需求日益增加。
无论是在日常生活中规划出行路线,还是在工程设计中确定最佳路径,寻找两点之间最短路径都是一个重要且常见的问题。
在计算机领域中,利用Matlab可以很方便地实现两点间最短路径的计算,为人们提供了便利。
我们需要明确两点间最短路径的概念。
在数学和计算机领域中,最短路径通常指的是两点之间经过的路径中,总长度或总权值最小的那条路径。
这个概念在实际生活中有着广泛的应用,比如在地图导航、通信网络优化、物流配送等方面都需要寻找最短路径来节约时间和成本。
在Matlab中,我们可以利用一些算法来计算两点间的最短路径,比如Dijkstra算法、Floyd-Warshall算法、A*算法等。
这些算法各有特点,适用于不同场景下的最短路径计算。
通过编写相应的代码,我们可以很容易地实现这些算法,从而得到两点间的最短路径。
以Dijkstra算法为例,该算法是一种用于计算图中节点之间最短路径的算法,其基本原理是通过不断更新起点到各个节点的距离来找到最短路径。
在Matlab中,我们可以通过构建图的邻接矩阵,并利用循环和条件判断来实现Dijkstra算法,从而得到两点之间的最短路径。
Floyd-Warshall算法是一种用于解决所有点对最短路径的算法,其核心思想是动态规划。
在Matlab中,我们同样可以通过构建图的邻接矩阵,并利用三重循环来实现Floyd-Warshall算法,从而计算出所有点对之间的最短路径。
除了这些经典的算法之外,A*算法是一种启发式搜索算法,也常用于计算两点之间的最短路径。
该算法结合了Dijkstra算法和贪心算法的特点,在搜索过程中充分利用启发函数来指导搜索方向,提高搜索效率。
在Matlab中,我们可以编写相应的启发函数,并结合优先队列等数据结构来实现A*算法,从而找到两点之间的最短路径。
总的来说,利用Matlab计算两点间最短路径是一项非常有意义和实用的工作。
matlab最短路dijkstra算法
matlab最短路dijkstra算法Matlab最短路Dijkstra算法Dijkstra算法是一种用于寻找图中最短路径的常用算法,可以解决许多实际问题,例如路网规划、通信网络优化等。
在Matlab中,我们可以利用其强大的矩阵运算和图论工具箱来实现Dijkstra算法,快速地找到两个节点之间的最短路径。
在开始之前,我们需要了解一些基本概念。
首先,图是由节点和边组成的数据结构,节点表示图中的位置或对象,边表示节点之间的连接关系。
每个边都有一个权重,用于表示节点之间的距离或代价。
最短路径问题的目标是找到两个节点之间的路径,使得路径上所有边的权重之和最小。
在Matlab中,我们可以使用图对象来表示图,并使用addnode和addedge函数来添加节点和边。
接下来,我们将使用Dijkstra算法来计算最短路径。
该算法的基本思想是从起始节点开始,逐步扩展到其他节点,每次选择当前距离起始节点最近的未访问节点,并更新其距离。
当所有节点都被访问过后,即可得到最短路径。
我们需要创建一个图对象,并添加节点和边。
假设我们有一个包含6个节点的图,节点之间的连接关系如下:节点1与节点2之间的距离为7节点1与节点3之间的距离为9节点1与节点6之间的距离为14节点2与节点3之间的距离为10节点2与节点4之间的距离为15节点3与节点4之间的距离为11节点3与节点6之间的距离为2节点4与节点5之间的距离为6节点5与节点6之间的距离为9我们可以使用addnode和addedge函数来添加节点和边,代码如下:g = graph();g = addnode(g, 6);g = addedge(g, [1 1 1 2 3 3 4 5], [2 3 6 3 4 6 5 6], [7 9 14 1015 11 6 9]);接下来,我们将使用Dijkstra算法来计算节点1到其他节点的最短路径。
Matlab提供了shortestpath函数来进行计算,代码如下:[dist, path, pred] = shortestpath(g, 1, 'Method', 'Dijkstra');其中,dist是一个数组,表示节点1到其他节点的最短距离;path 是一个cell数组,表示节点1到其他节点的最短路径;pred是一个数组,表示在最短路径中每个节点的前驱节点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Mathematica程序计算两线段之间的最短距离(*输入四个点坐标*)(*将坐标输成7/2形式可以得到准确解,输成3.5只能得到有一定精确度的数值解.*)(*如果两线段分别为AB,CD,按照以下规则输入坐标:{xA,yA,xB,yB,xC,yC,xD,yD}或者{{xA,yA},{xB,yB},{xC,yC},{xD,yD}}或者两种混和输入,必须保证按照顺序输入*)zuobiao = {{0, 0}, {13, 9}, {6, 6}, {0, 8}};zuobiao = Partition[Flatten[zuobiao], 2];(*下面进行坐标旋转,目的是让两条直线均不与坐标轴平行,省去以后很多分情况的麻烦,一劳永逸*)xuanzj = {0, \[Pi]/6, \[Pi]/4};brr = {};err = {};juli = {};frr = {};chuizuf =.;For[i = 1, i <= Length[xuanzj], i++,For[j = 1, j <= Length[zuobiao], j++,brr = Append[brr, {zuobiao[[j]][[1]]*Cos[xuanzj[[i]]] +zuobiao[[j]][[2]]*Sin[xuanzj[[i]]], -zuobiao[[j]][[1]]*Sin[xuanzj[[i]]] + zuobiao[[j]][[2]]*Cos[xuanzj[[i]]]}];];If[brr[[1]][[1]] != brr[[2]][[1]] &&brr[[3]][[1]] != brr[[4]][[1]] && brr[[1]][[2]] != brr[[2]][[2]] && brr[[3]][[2]] != brr[[4]][[2]],\[Alpha] = -xuanzj[[i]];Break[],brr = {}];];(*下面判断两直线是否平行*)pingxing =.;If[(zuobiao[[1]][[1]] - zuobiao[[2]][[1]])*(zuobiao[[3]][[2]] -zuobiao[[4]][[2]]) == (zuobiao[[1]][[2]] -zuobiao[[2]][[2]])*(zuobiao[[3]][[1]] - zuobiao[[4]][[1]]),If[(zuobiao[[1]][[1]] - zuobiao[[3]][[1]])*(zuobiao[[3]][[2]] -zuobiao[[4]][[2]]) == (zuobiao[[1]][[2]] -zuobiao[[3]][[2]])*(zuobiao[[3]][[1]] - zuobiao[[4]][[1]]), pingxing = 2(*直线重合*),pingxing = 1(*直线平行*)],pingxing = 0(*直线相交*)];(*下面是两直线重合时,先判断两条线段是否有重合部分,再计算距离*)If[pingxing == 2,drr = Transpose[brr];If[Partition[Sort[drr[[1]], Less],2] == {Sort[{drr[[1]][[1]], drr[[1]][[2]]}, Less],Sort[{drr[[1]][[3]], drr[[1]][[4]]}, Less]} ||Partition[Sort[drr[[1]], Less],2] == {Sort[{drr[[1]][[3]], drr[[1]][[4]]}, Less],Sort[{drr[[1]][[1]], drr[[1]][[2]]}, Less]},juli = Simplify[Norm[{Sort[drr[[1]], Less][[2]] - Sort[drr[[1]], Less][[3]],Sort[drr[[2]], Less][[2]] - Sort[drr[[2]], Less][[3]]}]];frr = {{{Sort[drr[[1]], Less][[2]],Sort[drr[[2]], Less][[2]]}, {Sort[drr[[1]], Less][[3]],Sort[drr[[2]], Less][[3]]}}};Print["准确解"];Print[juli];Print["数值解"];Print[juli // N],Print["两线段有一部分重合,距离为0"]]](*下面是两直线相交时,先计算两直线交点坐标,再判断两条线段是否相交*)(*下面定义一个函数jiaodian,用来计算两直线交点坐标*)jiaodian[zuobiao_] :=Module[{arr},arr = Flatten[zuobiao];{-(-arr[[3]] arr[[5]] arr[[2]] + arr[[3]] arr[[7]] arr[[2]] +arr[[1]] arr[[5]] arr[[4]] - arr[[1]] arr[[7]] arr[[4]] +arr[[1]] arr[[7]] arr[[6]] - arr[[3]] arr[[7]] arr[[6]] -arr[[1]] arr[[5]] arr[[8]] +arr[[3]] arr[[5]] arr[[8]])/(arr[[5]] arr[[2]] -arr[[7]] arr[[2]] - arr[[5]] arr[[4]] + arr[[7]] arr[[4]] -arr[[1]] arr[[6]] + arr[[3]] arr[[6]] + arr[[1]] arr[[8]] -arr[[3]] arr[[8]]), -(-arr[[3]] arr[[2]] arr[[6]] +arr[[7]] arr[[2]] arr[[6]] + arr[[1]] arr[[4]] arr[[6]] -arr[[7]] arr[[4]] arr[[6]] + arr[[3]] arr[[2]] arr[[8]] -arr[[5]] arr[[2]] arr[[8]] - arr[[1]] arr[[4]] arr[[8]] +arr[[5]] arr[[4]] arr[[8]])/(arr[[5]] arr[[2]] -arr[[7]] arr[[2]] - arr[[5]] arr[[4]] + arr[[7]] arr[[4]] -arr[[1]] arr[[6]] + arr[[3]] arr[[6]] + arr[[1]] arr[[8]] -arr[[3]] arr[[8]])}];(*下面是两直线相交时,先计算两直线交点坐标,再判断两线段是否相交,如果相交,输出"两线段相交,最短距离为0",否则继续接着的步骤*) xiangjiao =.;If[pingxing == 0,brr = Append[brr, jiaodian[brr]];(*计算两直线交点坐标*)If[(brr[[1]][[1]] - brr[[5]][[1]])*(brr[[5]][[1]] - brr[[2]][[1]]) >=0 && (brr[[3]][[1]] - brr[[5]][[1]])*(brr[[5]][[1]] -brr[[4]][[1]]) >= 0,Print["两线段相交,最短距离为0"];xiangjiao = 1,xiangjiao = 0];];(*下面先定义一个函数chuizu,用来计算点到直线的垂足坐标*) chuizu[zuobiao_] :=Module[{arr},arr = Flatten[zuobiao];{-(-arr[[1]] arr[[3]]^2 + 2 arr[[1]] arr[[3]] arr[[5]] -arr[[1]] arr[[5]]^2 - arr[[3]] arr[[2]] arr[[4]] +arr[[5]] arr[[2]] arr[[4]] - arr[[5]] arr[[4]]^2 +arr[[3]] arr[[2]] arr[[6]] - arr[[5]] arr[[2]] arr[[6]] +arr[[3]] arr[[4]] arr[[6]] + arr[[5]] arr[[4]] arr[[6]] -arr[[3]] arr[[6]]^2)/(arr[[3]]^2 - 2 arr[[3]] arr[[5]] +arr[[5]]^2 + arr[[4]]^2 - 2 arr[[4]] arr[[6]] +arr[[6]]^2), -(-arr[[1]] arr[[3]] arr[[4]] +arr[[1]] arr[[5]] arr[[4]] + arr[[3]] arr[[5]] arr[[4]] -arr[[5]]^2 arr[[4]] - arr[[2]] arr[[4]]^2 +arr[[1]] arr[[3]] arr[[6]] - arr[[3]]^2 arr[[6]] -arr[[1]] arr[[5]] arr[[6]] + arr[[3]] arr[[5]] arr[[6]] +2 arr[[2]] arr[[4]] arr[[6]] -arr[[2]] arr[[6]]^2)/(arr[[3]]^2 - 2 arr[[3]] arr[[5]] +arr[[5]]^2 + arr[[4]]^2 - 2 arr[[4]] arr[[6]] + arr[[6]]^2)} ];(*下面是两线段线不相交时,计算各个端点到所对线段的最短距离*) crr = {{brr[[1]], brr[[3]], brr[[4]]}, {brr[[2]], brr[[3]],brr[[4]]}, {brr[[3]], brr[[1]], brr[[2]]}, {brr[[4]], brr[[1]],brr[[2]]}};If[xiangjiao == 0,For[i = 1, i <= 4, i++,chuizuf = chuizu[crr[[i]]];If[(crr[[i]][[2]][[1]] - chuizuf[[1]])/(crr[[i]][[2]][[1]] -crr[[i]][[3]][[1]]) >=0 && (crr[[i]][[3]][[1]] - chuizuf[[1]])/(crr[[i]][[3]][[1]] -crr[[i]][[2]][[1]]) >= 0,frr = Append[frr, {crr[[i]][[1]], chuizuf}];juli =Append[juli, Simplify[Norm[crr[[i]][[1]] - chuizuf]]](*A的垂足F 在CD内,取线段AF距离*)];If[(crr[[i]][[2]][[1]] - chuizuf[[1]])/(crr[[i]][[2]][[1]] -crr[[i]][[3]][[1]]) <0 && (crr[[i]][[3]][[1]] - chuizuf[[1]])/(crr[[i]][[3]][[1]] -crr[[i]][[2]][[1]]) >= 0,frr = Append[frr, {crr[[i]][[1]], crr[[i]][[2]]}];juli =Append[juli,Simplify[Norm[crr[[i]][[1]] - crr[[i]][[2]]]]](*A的垂足F在C的外侧,取线段AC距离*)];If[(crr[[i]][[2]][[1]] - chuizuf[[1]])/(crr[[i]][[2]][[1]] -crr[[i]][[3]][[1]]) >=0 && (crr[[i]][[3]][[1]] - chuizuf[[1]])/(crr[[i]][[3]][[1]] -crr[[i]][[2]][[1]]) < 0,frr = Append[frr, {crr[[i]][[1]], crr[[i]][[3]]}];juli =Append[juli,Simplify[Norm[crr[[i]][[1]] - crr[[i]][[3]]]]](*A的垂足F在D的外侧,取线段AD距离*)];];Print["准确解"];Print[Sort[juli, Less][[1]]];Print["数值解"];Print[Sort[juli // N][[1]]];];(*下面是作图*)For[j = 1, j <= Length[brr], j++,err = Append[err, {brr[[j]][[1]]*Cos[\[Alpha]] +brr[[j]][[2]]*Sin[\[Alpha]], -brr[[j]][[1]]*Sin[\[Alpha]] +brr[[j]][[2]]*Cos[\[Alpha]]}];];err = Partition[err, 2];If[frr != {},grr = Table[Norm[frr[[i]][[1]] - frr[[i]][[2]]] // N, {i, 1, Length[frr]}];For[i = 1, i <= Length[grr], i++,If[grr[[i]] < grr[[1]],grr[[1]] = grr[[i]];frr[[1]] = frr[[i]]]];err = Append[err, frr[[1]]];];Print["下图中蓝色为已知的两条直线,红色为连接两条已知线段的最短线段"];ListLinePlot[err, AspectRatio -> Automatic,PlotStyle -> {Blue, Blue, Red}, AxesOrigin -> {0, 0},PlotRange -> All]。