电动车用内嵌式永磁同步电动机弱磁调速研究
电动汽车永磁同步电动机弱磁调速研究.
摘要本文围绕电动汽车用永磁同步电动机(PMSM调速系统展开工作,主要从控制角度研究扩展PMSM的调速范围。
永磁同步电动机具有体积小、效率高以及功率密度大等优点,特别是内置式PMSM具有较宽的弱磁调速能力。
上个世纪80年代以来,随着稀土永磁材料性价比的不断提高,以及电力电子器件的快速发展,永磁同步电动机的研究也进入了一个新的阶段。
矢量控制理论是交流调速领域的一个重大突破。
本论文详细讨论了永磁同步电动机的矢量控制,在推导其精确数学模型的基础上,分析了永磁同步电动机的几种矢量控制策略,包括了id=0控制、co sφ=1控制以及最大转矩/电流控制方式。
弱磁控制是永磁同步电动机矢量控制的前沿课题。
论文分析了永磁同步电动机弱磁调速原理,提出了三种特殊转子结构的新弱磁方案。
本文还围绕电动汽车用永磁同步电动机调速系统的硬件开发展开工作。
以TI公司专用于电机控制的TMS320LF2407A型数字信号处理器(DSP作为核心,开发了全数字化的PMSM矢量控制调速系统,并完成相应的系统硬件设计。
最后对所设计的电动汽车用永磁同步电动机驱动系统进行了初步的实验验证,表明采用本文所提出的全速范围弱磁控制算法具有较快的动态响应速度,可以满足调速系统弱磁性能要求。
关键词:永磁同步电动机;矢量控制;弱磁控制;控制器AbstractThis dissertation is devoted to the study on Permanent magnet synchronous motor (PMSM drive system for electric vehicle (EV application. It is mainly to improve the control of motors, then expand the scope of the motor speed. PMSM has the advantage of small volume, high efficiency and power density, especially inner permanent magnet synchronous motor have the ability of wide field-weakened operation. Therefore there search on PMSM has entered a new stage since the 1980’s with the improvement of ratio between the performance and the price of the rare earths PM material and the development of the power electronics devices. Vector control (VC theory is a great breakthrough in the AC speed control field. Also details of the VC of PMSM is presented in the paper,and the analysis of several circuit control strategies of VC theory applied to the PMSM control,which include theid=0 control,cosφ =1 control and the max torque/current control. The paper discusses the theory of weaking flux speed control of PMSM which is a new development direction. Then it brings out three new weaking flux plans,which have special rotor structures. This dissertation is devoted to the study of hardware on PMSMdrive system for EV application. Based on TI company DSP special-designed for motor control on TMS320LF2407A designs and develops a full-digital PMSM vector control system, and hardware of the system is accomplished. Finally, the experiment has been done for the drive which design in the paper. Result of the experiment indicate validity of the field-weakening method which introduced in the paper.Key word : PMSM Vector control field-weakened operation controller目录1 绪论 31.1 课题背景及意义 31.2电动汽车的发展现状及趋势 51.2.1 国内外主要国家电动汽车发展情况 51.2.2 电动汽车的发展趋势 71.3 永磁同步电动机弱磁控制研究现状 81.3.1从改进控制方法角度提高永磁同步电动机的弱磁能力 81.3.2从电机结构设计提高永磁同步电动机的弱磁能力 91.4 课题主要工作 92 电动汽车永磁同步电动机弱磁调速控制策略分析 102.1 永磁同步电动及数学模型 102.2 永磁同步电动机矢量控制原理 152.3 永磁同步电动机矢量控制基本电磁关系 162.3.1 电压极限椭圆 162.3.2 电流极限圆 182.3.3 恒转矩轨迹 182.3.4 最大转矩/电流轨迹 192.4 永磁同步电动电流控制策略 192.4.1 i d=0控制 192.4.2 控制 212.4.3 最大转矩/电流控制 222.4.4三种电流控制策略的比较 252.5 永磁同步电动机的弱磁控制 262.5.1 永磁同步电动机弱磁控制的基本原理 262.5.2 最大输入功率弱磁控制 292.5.3 永磁同步电动机弱磁扩速能力的提高 302.5.4 永磁同步电动机弱磁扩速困难原因分析 312.5.5 永磁同步电动机弱磁扩速方案 322.6 本章小结 343 电动汽车用永磁同步电动机的DSP控制 343.2电动汽车电机调速系统主电路设计 353.3 基于TMS320LF2407A DSP的电动汽车电机调速系统控制电路设计 353.3.1 速度给定模块 363.3.2 电机相电流检测电路 373.3.3 位置检测接口电路 383.3.4 PWM信号输出及动作保护电路 393.4 软件控制简要说明 403.5 转子位置与速度检测 413.5.1 转子位置检测 423.5.2 转子速度检测 433.5.3 最小和最大转速计算 431 绪论1.1 课题背景及意义汽车自1866年诞生以来,应用越来越广泛,技术不断发展,已经成为衡量一个国家物质生活和科学技术发展水平的重要标志,汽车工业己经成为世界经济和各国经济发展的支柱产业。
永磁同步电机弱磁调速的研究
DOI :10.19392/j.cnki.1671-7341.201920174永磁同步电机弱磁调速的研究睢丙东韩伟河北科技大学河北石家庄050000摘要:永磁同步电机弱磁调速是现代电机研究的热点之一,解释永磁同步电机传统的弱磁控制原理,研究分析传统弱磁调速的主要缺陷及限制调速范围的因素。
阐述弱磁调速的研究现状以及总结研究的新动向。
关键词:永磁同步电机;弱磁调速;调速范围现代永磁同步电机因为具有高转矩密度、高效率、较为优秀的低速驱动性能以及较宽的调速范围,已经被广泛的应用于电动汽车的驱驱动中。
永磁同步电机调速系统大多由直流电源、逆变器、控制器和电机组成。
但是永磁同步电机励磁所采用的稀土永磁体,磁场不能被调节,因而需要采用弱磁控制的方法来提高转速。
当电机输出功率一定,在低转速时扭矩的提高必然带来额定转速的降低,此时需要弱磁调速控制,如果保持最高转速且稳定,则弱磁调速的范围也随之提高。
因此对弱磁调速能力的研究对提升整个永磁同步电机控制系统的性能有着重要意义。
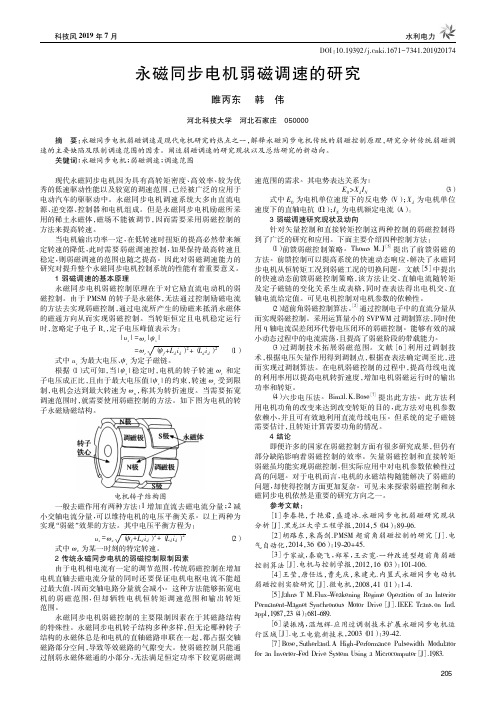
1弱磁调速的基本原理永磁同步电机弱磁控制原理在于对它励直流电动机的弱磁控制。
由于PMSM 的转子是永磁体,无法通过控制励磁电流的方法去实现弱磁控制,通过电流所产生的励磁来抵消永磁体的磁通方向从而实现弱磁控制。
当转矩恒定且电机稳定运行时,忽略定子电子Rs ,定子电压峰值表示为:|u s |=ωr |ψs |=ωr (ψf +L d i d )2+(L d i d )槡2(1)式中u s 为最大电压、ψs 为定子磁链。
根据(1)式可知,当|ψs |稳定时,电机的转子转速ωr 和定子电压成正比,且由于最大电压值|ψs |的约束,转速ωr 受到限制,电机会达到最大转速为ωn ,称其为转折速度。
当需要拓宽调速范围时,就需要使用弱磁控制的方法。
如下图为电机的转子永磁励磁结构。
电机转子结构图一般去磁作用有两种方法:1增加直流去磁电流分量;2减小交轴电流分量,可以维持电机的电压平衡关系。
内置式永磁同步电动机弱磁控制策略的研究
2018年10月第36卷第5期西北工业大学学报JournalofNorthwesternPolytechnicalUniversityOct.Vol.362018No.5收稿日期:2017⁃10⁃11基金项目:山西省自然科学基金(2013011035⁃1)资助作者简介:王伟(1991 ),太原理工大学硕士研究生,主要从事电机与电器研究㊂内置式永磁同步电动机弱磁控制策略的研究王伟1,2,王淑红1,张一博3,梁力波11.太原理工大学电气与动力工程学院,山西太原㊀030024;2.国网定州市供电公司,河北定州㊀073000;3.山西省电力公司检修分公司,山西太原㊀030000æèçöø÷摘㊀要:内置式永磁同步电动机采用最大转矩电流比弱磁调速方法时,需要求解一个非线性的高次方程组,来确定交直轴电流的给定值㊂针对这个问题,采用曲线拟合的方法,得到了较精确的电流给定,提高了控制系统的精度㊂同时,在弱磁高速区,提出了一种新的过调制控制算法,通过对电压矢量和相位的优化,实现了不同调制区的自然过渡,提高了逆变器的输出电压,在转速一定的情况下,提升了电机带负载能力;在负载转矩一定的情况下,拓展了永磁同步电机弱磁调速区域㊂关㊀键㊀词:内置式永磁同步电动机;弱磁调速;曲线拟合;过调制;控制器,实验设计中图分类号:TG156㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1000⁃2758(2018)05⁃0970⁃08㊀㊀永磁同步电机具有体积小㊁质量轻㊁功率因数高的特点,因而被广泛应用㊂然而,永磁体产生的磁场固定而不可调节,为了提高同步电机转速,在新能源汽车及伺服驱动系统中,往往需要其运行于弱磁调速状态㊂内置式永磁同步电机弱磁调速采用最大转矩电流比MTPA(maximumtorqueperamperecontrol)控制策略,可以最大程度地利用磁阻转矩,提高同一定子电流下电机的驱动能力㊂但是,该方法在获得d,q轴电流给定值时,需要求解一个非线性高次方程组,该高次方程组无法获得解析解㊂国内外对该问题做了一些研究,文献[1]将迭代法应用到控制策略中,得到需要的d,q轴电流给定,具有一定的工程实用性,但其过程比较复杂,不易数字实现;文献[2]先离散测试电机各个状态下的参数,然后制作成表格,可以实时根据工况查询所需值,但是该方法需要大量存储空间;文献[3]在转矩给定的情况下,利用定步长改变电流矢量角从而改变电流轨迹,但是在变负载时,系统稳定性很难保证㊂采用MTPA控制策略,一方面电流给定较难确定;另一方面,MTPA输出转矩最大点的转速,受到逆变器最大输出电压Usmax的限制㊂为了提高逆变器的输出电压最大值,必须采用过调制的控制策略㊂文献[6]根据电压零矢量作用时间,利用查表法确定调制比,实现了过调制算法,但是该算法需要大量的离线数据㊂文献[7]比较了双模式过调制方法和单模式过调制方法的优缺点,指出了各自适用的场合;文献[8]提出基于三相桥臂坐标系的算法,取消了扇区的概念,简化了计算过程,统一了线性区和过调制区的算法,但文中该方法用在开环控制系统,未对闭环控制系统做进一步研究;文献[9]将最小幅值误差过调制应用在电机闭环控制系统中,虽然方法简单,但考虑因素较少,对电机控制性能有一定影响㊂本文针对MTPA控制策略中,d,q轴电流给定值无法获得解析解的问题,提出了一种多项式曲线拟合的方法求解高次方程组,得到了不同转速要求时的交直轴电流给定值,该方法易于实现,控制精度较高;同时,利用梯度下降法,实现电机从中低速向高速过渡,并在弱磁调速高速区,提出了一种新的过调制算法,根据合成电压矢量的幅值和相角,将电机的调制区分为4个区域:线性区㊁过调制Ⅰ区㊁过调制Ⅱ区和六拍工作区㊂控制系统对合成电压矢量时时监测,可自动实现不同调制区的转换㊂该算法只关注合成电压矢量幅值和相角,目标明确,实现相对容易㊂仿真和实验结果表明,本文所提出的过调制控制方案,使得电机在转速一定的情况下,提升了电第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究机带负载能力,在负载转矩一定的情况下,拓宽了永磁同步电机弱磁调速范围㊂1㊀过调制弱磁控制系统结构永磁同步电机弱磁控制系统结构框图如图1所示,在MTPA弱磁控制策略基础上,采用曲线拟合方法对其进行多项式拟合,得到交直轴电流给定指令,根据梯度下降法对电流指令进行修正,利用过调制控制方案,扩大电机的稳态运行区㊂图1㊀弱磁控制系统结构框图1.1㊀MTPA的曲线拟合方法对永磁同步电机来说,当转矩一定时,理论上转矩曲线上的电流点都可以满足要求,但这些电流矢量中幅值最小的,能够输出同样的转矩,是最优的电流矢量㊂所有的这些点的集合就组成了MTPA曲线,如图2中OA段㊂图2㊀弱磁控制下电压㊁电流㊁转矩轨迹MTPA曲线上的交直轴电流给定值由Te与id,iq关系式决定:9p2(Lq-Ld)2i4q+6pTeψfiq-4T2e=0-ψ2fidLq-Ld⒥+3ψ2fi2d-3ψf(Lq-Ld)i3d+㊀㊀(Lq-Ld)2i4d-4T2e9p2=0ìîíïïïïïïï(1)㊀㊀由(1)式可见,该关系式为二元四阶高次方程组,无法得到d,q轴电流对应的解析解㊂本文对2个高次方程所对应的平面曲线进行拟合,在maltlab环境下,画出约束关系曲线,然后在曲线上取得足够多的点,利用cftool工具箱,得到拟合曲线如图3所示㊂图3㊀MTPA拟合曲线忽略饱和因素带来的影响,所用样机参数:P=2.2kW,UN=380V,IN=4.17A,p=2,Rs=2.69Ω,Ld=0.0632H,Lq=0.1226H,J=0.0153kg㊃m2,nN=1500r/min㊂利用电机参数,可得多项式拟合函数为:iq=-0.005922T2e+0.4735Te-0.01175id=0.0004643T3e-0.01664T2e-㊀㊀0.006372Te+0.005484㊀㊀该拟合曲线的SSE(和方差)为0.0008585,RMSE(均方差)为0.005537,R⁃square(确定系数)为1,表明多项式对高次方程的拟合具有较高的精度㊂1.2㊀过调制控制方法在两电平逆变器中,总共有8个基本电压矢量,这8个电压矢量通过平行四边形法则可以合成任意方向的矢量,但是逆变器输出的电压矢量,终端不能落在空间矢量六边形区域外㊂永磁同步电机弱磁调速时,为了增加电机弱磁调速范围,增大最大输出电压,在高速区电压矢量可能在六边形区域外,此时,可以通过改变给定电压的相角和幅值,使得合成电㊃179㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第36卷压矢量落在正六边形边界上,这种调整就是过调制控制方案㊂本文通过对电压矢量的监测,把调制区分成4个部分:线性调制区㊁过调制I区㊁过调制II区和六拍工作区,过调制原理如图4所示㊂图4㊀过调制原理图1)线性调制区如图4a)和图4b)所示,以O为圆心,OA为半径的圆形区域,为线性调制区,该区域内电压矢量和磁链矢量的轨迹为标准的正圆,所给定电压矢量的幅值小于Udc/3,电机运行于基速以下㊂该区域的特点是:输出电压与给定电压矢量相等,基本电压矢量的作用时间由SVPWM算法决定㊂2)过调制Ⅰ区域如图4a)和图4b)所示,在弱磁调速中,当转速给定值较大时,电压合成矢量U∗的幅值在Udc/3和2Udc/3之间,一旦电压矢量端点落在正六边形之外,实际的输出矢量无法满足要求,故采用相角不变的过调制方式,将U∗调整为U1,用U1代替电压矢量U∗,其端点落在BE上㊂调整后的电压矢量在第一扇区的表达式为公式(2),其他扇区同理:θ=arcos(U∗α/U∗)U1=Udc3cosθ-π6æèçöø÷㊀0<θ<π3ìîíïïïï(2)式中,U∗α和U∗β为给定电压矢量U∗在α轴,β轴的电压分量㊂这种控制算法仅改变了电压矢量幅值,没有改变相位,所以磁链依然接近于圆形㊂3)过调制Ⅱ区如图4a)和图4b)所示,在弱磁调速中,当合成电压矢量U∗的幅值大于2Udc/3且小于4Udc/33,利用幅值变化最小的思想,找出U∗在BE上的投影点,得到最终的电压矢量U2㊂用U2代替电压矢量U∗,其幅值和相角都发生了变化㊂这种控制算法改变了电压矢量的相角和幅值,磁链会产生平行于原磁链的分量,磁链的大小发生变化㊂调整后的电压矢量在第一扇区的表达式为公式(3),其他扇区同理γᶄ=-π3+θ0<γ<π6γᶄ=2π3+θπ6<γ<π3|U∗m|=Udc3sinγᶄ+π3æèçöø÷0<γ<π3ìîíïïïïïïïïï(3)式中θ=arctanUdc3|U∗|cosγ+π3æèçöø÷㊀㊀γ为参考向量U∗与OA之间的夹角,γᶄ为调制后的向量U2与OA之间的夹角㊂4)六拍工作区如图4a)和图4b)所示,当合成电压矢量的幅值大于4Udc/33,即端点落在以4Udc/33为半径的圆外时,用最靠近该矢量的基本电压矢量代替原矢量,逆变器工作在六拍状态,输出线电压的基波幅值达到最大值23Udc/π㊂此时直流母线利用率最高,输出相电压为阶梯波㊂调整后的电压矢量在第一扇区的表达式为公式(4),其他扇区同理:θ=arcos(U∗α/U∗)U=UOB㊀0<θ<π6U=UOE㊀π6<θ<π3㊀ìîíïïïïïï(4)2 过调制弱磁控制系统仿真模型如图2所示,OA为MTPA运行区域,曲线AB段为恒功率运行区域,在OABC包络线范围之内为恒转矩工作区域,曲线BC段id达到限幅值㊂在弱磁低速区,电机沿着MTPA曲线运行,在㊃279㊃第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究弱磁高速区,电流沿着恒转矩方向修正,修正值为:idx=αΔUTd/Tiqx=αΔUTq/T{(5)(5)式中,α为修正系数,ΔU为给定电压与反馈电压的差值,T为转矩的梯度,Td,Tq为T的d,q轴分量㊂在电机整个弱磁运行区域,通过时时监测合成电压矢量的幅值和相角,不同的调制区,采用不同算法进行调制㊂该系统仿真模型如图5所示㊂图5㊀过调制弱磁控制仿真模型3㊀仿真结果及分析3.1㊀过调制对电压矢量的优化在基速以下,电压矢量在线性调制区内,其轨迹为圆形,当转速达到基速时,达到线性调制区内最大值,此时电压矢量的轨迹为正六边形内切圆,如图6所示㊂随着转速的增加,电机的工作状态进入过调制弱磁控制区域,逆变器处于过调制阶段㊂从图7可以看出,电压矢量落在正六边形边界上,过调制给弱磁控制区带来更多的电压余量,增大了电压输出范围㊂图6㊀无过调制的电压矢量轨迹图7㊀有过调制的电压矢量轨迹3.2㊀过调制对系统控制性能的影响3.2.1㊀对输出最大转矩工作点转速的影响随着转矩和电流的上升,电机的稳态工作点沿着MTPA曲线移动,当达到电压极限椭圆和电流极限圆时,所带载能力最大㊂如图8所示,A点是电压极限椭圆,电流极限圆和MTPA三者的交点㊂忽略电机定子电阻压降,该点的转速和转矩为:㊃379㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第36卷ωA=Usmax-(Ld+Lq)C2+8LdCψf16(Lq-Ld)+ψ2f+L2qI2s(6)Te=32p[ψf+(LdA-LqA)idA]iqA(7)式中,C=ψf-ψ2f+8(Lq-Ld)2I2s㊂图8㊀电机稳态运行点由(6)式和(7)式,结合电机参数,可得A点电机稳定运行速度为1644.6r/min,电磁转矩为14.1658N㊃m㊂图9㊀A点转速对比图从图9可以看出,仅采用SVPWM策略,电机带额定负载时,弱磁调速最大转速为1544.5r/min,电机输出线电压基波幅值为529.4V,当加入过调制控制策略时,可以达到给定转速,电机的输出线电压基波达到561.1V㊂在MTPA输出转矩最大点,过调制的引入,提高了逆变器输出电压,扩大了电机弱磁调速范围㊂3.2.2㊀同转速下,电机带载能力的比较电机给定转速为2500r/min,由图10和图11可知,2种策略下的控制系统d轴电流均达到限幅值-4A㊂没有采用过调制的控制系统,线电压基波幅值为530.6V,电磁转矩最大值为7.04N㊃m,运行在B点,采用过调制的控制系统,线电压基波幅值为556V,电磁转矩最大值为8.15N㊃m,运行在C点㊂明显可以看出,在2500r/min的给定转速下,过调制使得电机的输出转矩提升了1.11N㊃m㊂图10㊀电机稳态运行点图11㊀同转速下,带载能力的比较3.2.3㊀不同过调制算法对系统性能的影响只要电压矢量端点落在六边形之外,就可以采用最小幅值误差过调制,但这种方法同时改变了电压的相角和幅值,而本文在一定范围内,只调整幅值,并未改变矢量相角,只有满足一定条件,才会过渡到幅值和相角都改变的阶段㊂如图12和图13所示,在1750r/min的转速下,带10N㊃m负载,曲线1为电机稳态时,仅用最小幅值误差过调制方法下的转速和转矩波形曲线,曲线2为本文方法下的电机转速和转矩波形曲线㊂㊃479㊃第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究可以发现,在同样参数情况下,使用最小幅值误差过调制方法时,电机转速波动为上下0.7r/min,而转矩波动为上下0.4N㊃m;而本文的转速波动为上下0.4r/min,转矩波动为上下0.3N㊃m㊂仿真结果表明,相同转速给定和PI参数的情况下,在达到稳态时,与最小幅值误差过调制相比,本文的转速和转矩波动更小㊂图12㊀转速波动对比图图13㊀转矩脉动对比4 实验结果为了更好的验证本文所提控制方案的正确性与实用性,设计了主回路和控制回路,搭建了2.2kW永磁同步电机实验平台㊂系统采用TI公司的TMS320F2812为控制芯片,采用CAN通信实现下位机与上位机的数据传输,采样频率设定为4kHZ㊂实验平台如下:图14㊀永磁同步电机实验平台直流发电机作为永磁同步电机负载,调节发电机励磁和电枢回路电阻可以调节负载大小㊂实验中保持额定电流不变,通过调节转速指令,可以实现电机不同转速下的运行㊂图15 图17中,在电机额定负载条件下,a)图为未加入过调制图形,b)图为加入过调制图形㊂图15㊀转速对比图图16㊀相电流对比图图17㊀id,iq电流对比图实验表明,无过调制控制策略的情况下,电机以额定电流运行,所能达到的转速为1510r/min,而有过调制控制时,转速为1590r/min,电机转速提高了80r/min㊂实验与仿真相比,起动时间要更长,且速度要比仿真略低,这是因为与理想的仿真模型相比,电压在传输过程中,经过逆变器等设备,会发生电压降落㊂从相电流波形中可以发现,带有过调制的控制策略,启动电流更大,加速性能更好㊂在id,iq的波形中可以看出,两者的稳态值在给定的㊃579㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第36卷MTPA曲线上波动,稳定的直轴电流为-2A,交轴电流为5.4A,电流给定指令精度较高㊂通过控制器,保持电机给定转速2500r/min恒定运行,d轴电流限幅值设定为-4A,在保证PI参数相同的情况下,通过调节负载,使得d轴电流向限幅值趋近,电机达到稳态时,2种控制方式下id,iq波形曲线如图18所示㊂图18㊀同转速下,id,iq电流对比图其中,图18a)和18b)分别为无过调制和有过调制下的d,q轴电流曲线,可以发现,在d轴电流相近的情况下,使用不带过调制控制策略时,q轴电流在1.85A附近波动,使用带过调制的控制策略时,q轴电流在2.2A附近波动,后者比前者提升了0.35A,意味着电机带载能力更强㊂给定电机转速1750r/min,保证直流电机发电机励磁电流和负载电阻相同的情况下,仅用最小幅值过调制和本文所提出的过调制控制方式,稳态转速对比曲线如图19所示㊂图19㊀转速波动对比图其中,图19a)和19b)分别为仅用最小幅值过调制和本文所提过调制控制策略下的稳态转速波形㊂在相同实验条件下,电机达到稳定运行状态㊂使用最小幅值误差过调制方法时,电机转速波动为上下3r/min;而本文过调制方法下的转速波动为上下2r/min,与仅含有最小幅值误差过调制相比,本文的转速波动更小㊂5㊀结㊀论本文在低速弱磁区,对最大转矩电流比采用曲线拟合方法,实现了交直轴电流较准确给定,电机可以稳定地运行在所划定的电流轨迹上㊂同时,提出一种新的过调制控制策略,根据不同调制区,采用不同的方法,通过对电压合成矢量幅值和相角的优化,增加了弱磁区的电压裕度㊂仿真和实验结果表明,采用过调制的弱磁算法与无过调制的弱磁算法相比,增加了电机的带载能力,扩展了永磁同步电机的调速范围㊂参考文献:[1]㊀李长红,陈明俊,吴小役.PMSM调速系统中最大转矩电流比控制方法的研究[J].中国电机工程学报,2005,25(21):172⁃177LiChanghong,ChenMingjun,WuXiaoyi.TheStudyofTheMaximumTorqueperAmpereControlStrategyofPermanentMagnetSynchronousMotorSpeedRegulationSystem[J].ProceedingsoftheCSEE,2005,25(21):172⁃177(inChinese)[2]㊀ConsoliG,ScarcellaG,ScelbaATesta.Steady⁃StateandTransientOperationofIPMSMsunderMaximum⁃Torque⁃per⁃AmpereControl[J].IEEETransonIndustryApplications,2010,46(1):121⁃129[3]㊀Dianov,KimYoung⁃Kwan,LeeSang⁃Joon,etal.RobustSelf⁃TuningMTPAAlgorithmforIPMSMDrives[C]ʊ200834thAn⁃nualConferenceofIEEEIndustrialElectronics,Orlando,FL,2008:1355⁃1360[4]㊀盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010,30(9):74⁃79ShengYifa,YuShouyi,GuiWeihua,etal.PermanentMagnetSynchronousMotorSystemMagneticFluxControlStrategyforTrackVehicle[J].ProceedingsoftheCSEE,2010,30(9):74⁃79(inChinese)㊃679㊃第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究[5]㊀吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010,25(1):58⁃63WuFang,WanShanming,HuangShenghua.AnOver⁃ModulationAlgorithmandApplicationinPermanentMagnetSynchronousMotorFlux⁃WeakeningControlStrategy[J].TransofChinaElectrotechnicalSociety,2010,25(1):58⁃63(inChinese)[6]㊀梁振鸿,温旭辉.应用过调制技术扩展永磁同步电机运行区域[J].电工电能新技术,2003,22(1):39⁃42LiangZhenhong,WenXuhui.ApplyingOver⁃ModulationTechnologytoExtendtheOperatingAreaofPermanentMagnetSyn⁃chronousMotor[J].AdvancedTechnologyofElectricalEngineeringandEnergy,2003,22(1):39⁃42(inChinese)[7]㊀张艳芳,林飞,马志文,等.2种SVPWM过调制方法的比较研究[J].北京交通大学学报,2005(2):39⁃43ZhangYanfang,LinFei,MaZhiwen,etal.ComparativeStudyofTwoMethodsofSVPWMOver⁃Modulation[J].JournalofBei⁃jingJiaotongUniversity,2005(2):39⁃43(inChinese)[8]㊀吴德会,夏晓昊,张忠远,等.基于三相桥臂坐标的SVPWM过调制方法[J].电工技术学报,2015,30(1):150⁃158WuDehui,XiaXiaohao,ZhangZhongyuan,etal.SVPWMOverModulationMethodBasedonThreePhaseBridgeArmCoordi⁃nates[J].TransofChinaElectrotechnicalSociety,2015,30(1):150⁃158(inChinese)[9]㊀范晓坤.永磁同步电动机变频控制系统硬件设计及弱磁调速[D].太原:太原理工大学,2016FanXiaokun.HardwareDesignofVariableFrequencyControlSystemforPermanentMagnetSynchronousMotorandFluxWeak⁃eningSpeedRegulation[D].Taiyuan,TaiyuanUniversityofTechnology,2016(inChinese)[10]WangY,WenX,ZhaoF.AProposedControlStrategyofPmsmforDeepField⁃WeakeningandSquare⁃WaveMode[C]ʊ201215thInternationalConferenceonElectricalMachinesandSystems(ICEMS),Sapporo,2012:1⁃6[11]朱磊,温旭辉,赵峰,等.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,31(18):67⁃72ZhuLei,WenXuhui,ZhaoFeng,etal.StudyontheMechanismofMagneticFluxLossofPermanentMagnetSynchronousMotorandCountermeasures[J].ProceedingsoftheCSEE,2011,31(18):67⁃72(inChinese)[12]方晓春,胡太元,林飞,等.基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制[J].电工技术学报,2015,30(2):140⁃147FangXiaochun,HuTaiyuan,LinFei,etal.FluxWeakeningControlofPermanentMagnetSynchronousMotorBasedonSingleCurrentRegulatorwithQuadratureAxisandDirectAxisCurrentCoupling[J].TransofChinaElectrotechnicalSociety,2015,30(2):140⁃147(inChinese)StudyonMagneticFluxWeakeningControlStrategyofInteriorPermanentMagnetSynchronousMotorWangWei1,2,WangShuhong1,ZhangYibo3,LiangLibo11.CollegeofElectricalandPowerEngineering,TaiyuanUniversityofTechnology,Taiyuan030024,China;2.DingzhouPowerSupplyCompanyofStateGrid,Dingzhou073000,China;3.MaintenanceBranchofShanxiElectricPowerCompany,Taiyuan030000,Chinaæèççöø÷÷Abstract:WhenthemaximumratiooftorquetocurrentstrategyisusedforIPMSMfluxweakeningspeedregula⁃tion,itisneededtosolvenonlinearHigh⁃Orderequationsdeterminingthedirectandquadratureaxiscurrentgivenvalue.Facingthisproblem,thepaperusedthecurvefittingandobtainedthegivencurrent,improvedthecontrolaccuracyofthesystem.Atthesametime,intheweakmagnetichighspeedzone,proposedanewover⁃modulationcontrolalgorithm,whichthroughtheoptimizationofvoltagevectorandphase,achievedanaturaltransitionofdif⁃ferentmodulationregion,increasedtheoutputvoltageoftheinverter,andenhancedthestatorvoltageandoutputtorquewhenmotorrunsatacertainspeedgivenvalue,expandedsteadyweakmagneticregionofIPMSMwhentheloadtorqueiscertain.Keywords:IPMSM;fluxweakeningspeedregulation;curvefitting;over⁃modulation;controller;designofexperi⁃ment㊃779㊃。
电动车用永磁同步电机弱磁控制策略研究
电动车用永磁同步电机弱磁控制策略研究苏颖毅【期刊名称】《佳木斯大学学报(自然科学版)》【年(卷),期】2012(000)006【摘要】A layout scheme of the electric drive system of a pure electric vehicle was introduced in this paper.The longitudinal dynamics model of the electric vehicle was built , from which the driving resistance was derived and then transformed to an equivalent resistance torque on the axis of the electric machine .The mathe-matical model of a permanent magnet synchronous machine was built in the two phase rotating reference frame and the motion equation of the electric machine with respect to the driving resistance was given .The necessity of the flux -weakening control was pointed out according to the voltage and current limitations of the three phase in -verter.A surface mounted permanent magnet synchronous machine was chosen and the relative flux -weakening control was put forward.By means of the simulation in Matlab /Simulink it was concluded that the flux -weake-ning control can effectively widen the rotational speed range of the electric machine , which can raise the maxi-mum speed of the electric vehicle.% 介绍了一种纯电动车电力驱动系统布置方案。
永磁同步电机弱磁控制理论研究
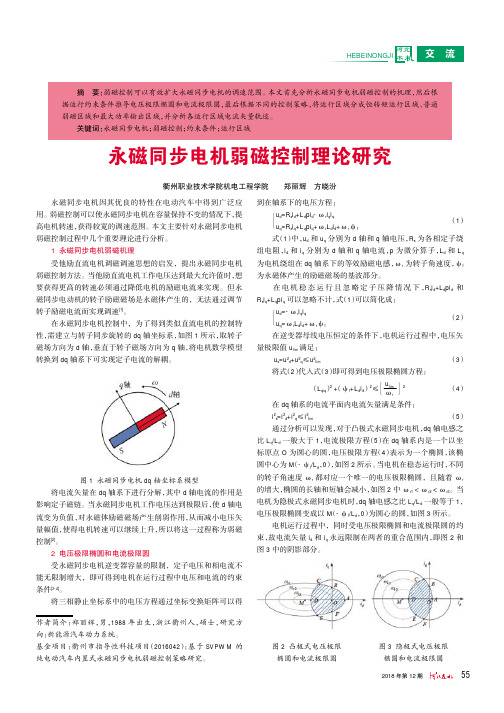
图 6 普通弱磁区域电流矢量轨迹(圆心在内) 3.3 最大功率输出区域 如图 7 所示,永磁同步电机的电压极限椭圆中心 M 在电流 极限圆的内部时,最大功率输出轨迹与电流极限圆必有交点 B, 随着转速的升高,电流矢量从 A 点变化到 B 点后将沿着最大功 率输出轨迹变化,直至椭圆中心 M 点。M 点为电机在该区域的极 限运行点,此时在理想状态下永磁体的磁链被完全抵消,电机的 转速能够达到无限大。
图 1 永磁同步电机 dq 轴坐标系模型 将电流矢量在 dq 轴系下进行分解,其中 d 轴电流的作用是 影响定子磁链。当永磁同步电机工作电压达到极限后,使 d 轴电 流变为负值,对永磁体励磁磁场产生削弱作用,从而减小电压矢 量幅值,使得电机转速可以继续上升,所以将这一过程称为弱磁 控制[2]。 2 电压极限椭圆和电流极限圆 受永磁同步电机逆变器容量的限制,定子电压和相电流不 能无限制增大,即可得到电机在运行过程中电压和电流的约束 条件[3-4]。 将三相静止坐标系中的电压方程通过坐标变换矩阵可以得
(3)
Hale Waihona Puke 蓘 蓡 (Lqiq)2 +(ψf+Ldid)2≤
ulim ωr
2
在 dq 轴系的电流平面内电流矢量满足条件:
(4)
i2s=i2d+i2q≤i2lim
(5)
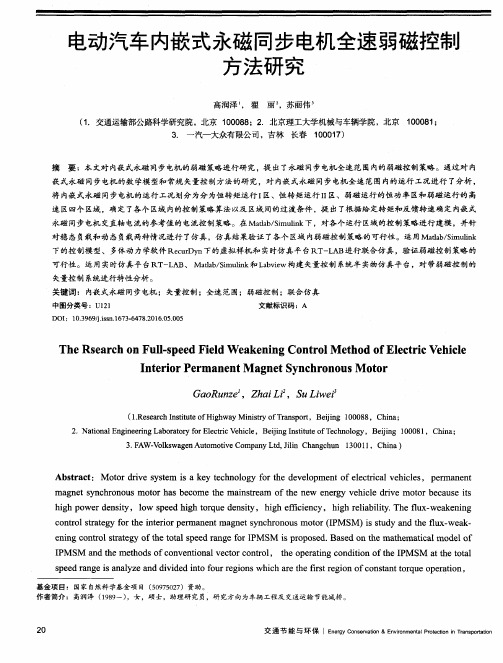
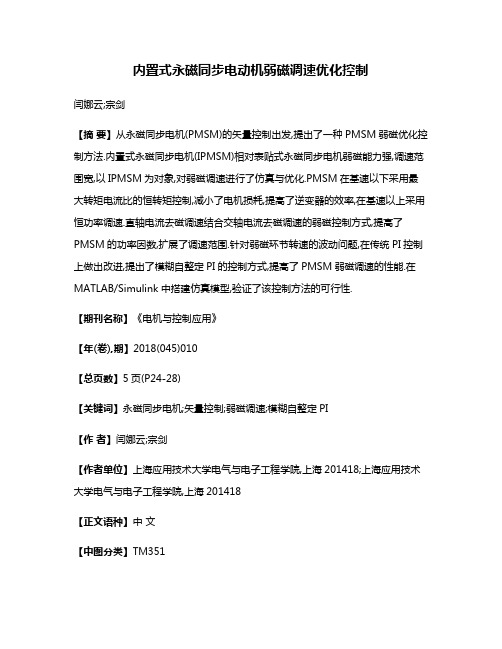
通过分析可以发现,对于凸极式永磁同步电机,dq 轴电感之
比 Lq/Ld 一般大于 1,电流极限方程(5)在 dq 轴系内是一个以坐
标原点 O 为圆心的圆,电压极限方程(4)表示为一个椭圆,该椭
关键词:永磁同步电机;弱磁控制;约束条件;运行区域
永磁同步电机弱磁控制理论研究
衢州职业技术学院机电工程学院 郑丽辉 方晓汾
电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究(一)――概要

收稿日期 :2001212229基金项目 :国家 863计划项目 (8632Z37203 1电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究 (一———恒转矩控制及弱磁控制时的功率特性徐衍亮(250061山东省济南市山东大学电气工程学院 (100083北京市北京航空航天大学宇航学院摘要采用 d 、 q 坐标系下的相量分析方法 , 研究永磁同步电动机(PMSM 、特别是电动汽车用 PMSM 1详细分析了不同弱磁率、不同凸极率对电机电压、电流相量变化轨迹的影响 , 及由此引起的电机的功率特性及弱磁扩速能力的差异 1推导出以弱磁率和凸极率为变量的 PMSM 的弱磁扩速倍数表达式 , 由此得出提高 PMSM 弱磁扩速能力的根本途径 , 比较了不同磁路结构 PMSM 弱磁扩速能力的大小 1关键词功率特性 ; 弱磁 ; 相量分析 /电动汽车 ; 永磁同步电动机中图分类号TM41文献标识码 :A文章编号 :1000-5323(2002 05-0401-05STU DY ON POWER CAPABIL ITY AN D FL UX 2WEAKENING L EVE L OF PERMANENT MAGNET SY NCHRONOUS MOTORIN E L ECTRIC VEHICL E APPL ICATION (Ⅰ— POWER CAPAB IL IT Y WHEN CONSTAN T TORQU E AND FL U X2WEN KEN IN G CON TROLX U Y an 2liang(School of Elect. Eng. , Shandong Univ. , Jianan City , Shandong Province 250061,China(Beijing Univ. of Aeronautics and Astronautics , Beijing City 100083, ChinaABSTRACT The phasor method is adopted for the first time to analyze the influence of the demagnetizing coefficient , saliency ratio on the loci of voltage and current and then on the power capability and flux 2weakening level of permanent magnet synchronous motor (PMSM especially in electric vehicle (EV application. The de2scription of the PMSM ’ s flux 2weakening adjusting speed capability is wor ked out and expressed with the demag 2netizing coefficient and saliency ratio , by which the radical methods to enhance the PMSM ’ s flux 2weakening ca 2pability are concluded , and the flux 2weakening capability of PMSM with different magnet structures is com 2pared.KE Y WOR DS Power capability ; Flux 2weakening ; Phasor analysis/Electric vehicle (EV ; Permanent magnet synchronous motor (PMSM2002年 10月第 32卷第 5期山东大学学报 (工学版JOURNA L OF SHAN DONG UNIVERSIT Y(ENGINEERING SCIENCEVol. 32 No. 5Oct. 20020引言永磁同步电动机具有尽可能宽广的弱磁调速范围对电动汽车驱动有特别重要的意义 , 能够在电机最大功率 (即逆变器容量不变的条件下提高电动汽车的起动加速能力 [1]及低速爬坡能力 , 或者说在保持电动汽车起动加速及低速爬坡能力不变的前提下降低电机的最大功率 , 从而降低逆变器的容量 1因此对电动汽车驱动用 PMSM 功率特性 (功率转速特性及弱磁扩速能力的分析具有更为重要的意义 1目前 , 分散地选取几组电机参数 (永磁磁链和交直轴电感进行功率特性曲线比较是永磁同步电动机功率特性分析的通用方法 [2~7]1然而这一方法不但分析结论缺乏普遍性 , 而且无法对电机参数变化引起的功率特性曲线的差异原因进行研究和探讨 1实际上 , 永磁同步电动机的不同参数产生电机不同的功率特性 , 原因在于不同电机参数引起电机电压电流相量不同的变化轨迹 1因此本文采用永磁同步电动机 d 、 q 坐标系下的相量分析方法 , 以弱磁率和凸极率为电机参数 , 从电机调速过程中电压电流相量的变化轨迹出发 , 考虑到电动汽车用电机运行的实际 , 研究永磁同步电动机的功率特性 , 对电机的凸极率和弱磁率变化所引起的电机功率特性差异进行综合分析 1本论文由两部分组成 , 第一部分采用永磁同步电动机 d 、 q 坐标系下的相量分析方法 , 以凸极率和弱磁率为电机参数 , 分析了永磁同步电动机恒转矩控制及普通弱磁控制时的电压电流相量的变化轨迹及功率特性的变化规律 ; 第二部分在第一部分的基础上分析了最大输入功率弱磁控制的电压电流相量的变化轨迹及功率特性 , 提出最大输入功率弱磁控制的等效电流控制策略 , 推导出以弱磁率和凸极率为变量的 PMSM 的弱磁扩速倍数的数学表达式 , 提出提高 PMSM 弱磁扩速能力的根本措施 , 分析了损耗、饱和等因素对 PMSM 功率特性及弱磁扩速倍数的影响 1 1电动汽车驱动用永磁同步电动机电流控制策略及其相量分析方法电动汽车驱动用永磁同步电动机与一般驱动用永磁同步电动机的区别在于 , 前者需更大的短时和瞬时大电流 , 使其不但拥有恒转矩控制和普通弱磁控制 , 还具备最大输入功率弱磁控制的条件 11. 1永磁同步电动机电流控制策略由于永磁同步电动机的功率特性及弱磁扩速能力不但决定于电机本身的参数 , 还与逆变器容量及直流母线电压大小有关 , 因此以下分析是以电机的凸极率ρ和弱磁率ξ为参数 , 分别定义为 :ρ=LL d(1ξ=Ψf(2 其中 :L d 、 L q ———直交轴电感Ψf——— d 、 q 坐标系下永磁磁链电动汽车用永磁同步电动机的电流控制策略有三种即 [2~4]:1 恒转矩控制:i s =i lim , u Φu lim ;2 普通弱磁控制 :i s =i lim , u =u lim ;3 最大输入功率弱磁控制:i s Φi lim , u =u lim ; 其中 :i s 、 u s 分别为 d 、 q 坐标系下电机电流和电压 , i lim 、 u lim 分别为 d 、 q 坐标系下电机的极限电流和极限电压 1对这三种电流控制策略 , 其中恒转矩控制和普通弱磁控制是必须存在的 , 最大输入功率弱磁控制只有在ξ>1时才有可能存在 1电流控制策略的详细内容请见有关文献 11. 2调速永磁同步电动机功率特性相量分析方法图 1为调速永磁同步电动机d 、 q 坐标系下的相量图 , 其中角α、β分别为电压电流相量与 q 轴的夹角, φ为功率因数角 , 在不计各种损耗的假定下 , 电机的功率可表示为 :P em =u s i s cos φ(3 为使分析更具普遍性 , 永磁同步电动机功率特402山东大学学报 (工学版 2002年性的分析以标幺值形式进行 , 功率及电角速度的基值 P c 、ωc 分别定义为 :P c =P emN =u lim i lim N(4 ωc =Ψf(5其中, i lim N =Ψf /L d可以看出 , 基值功率是弱磁率为 1时电机的最大功率 , 基值电角速度为电机理想空载时的转折电角速度1图 1永磁同步电动机电压电流相量Fig. 1 Phasors of voltage and current of PMSM2永磁同步电动机恒转矩控制和普通弱磁控制时的功率特性2. 1电压电流相量变化轨迹根据前述电流控制策略 , 永磁同步电动机在恒转矩控制及普通弱磁控制下 , 电压、电流相量角α、β满足下式 :α=tan -1[ρcos β/(1/ξ-sin β ]ξ<1/sin β180°-tan -1[ρcos β/(sin β-1/ξ]ξ>1/sin β90°ξ=1/sin β(6因此 , 永磁同步电动机在整个恒转矩控制区和普通弱磁控制区具有如图 2所示的电压、电流相量变化轨迹 , 可以看出 :1 在恒转矩控制区 , 电流相量保持为 OA i 不变 , 其相角β1可表示为下式 :β1=0°ρ=1sin-1224(ρ-1ρ≠ 1(7电压相量相角为α1, 幅值由 0增加到其极限电压 u lim 12 在普通弱磁控制区 , 电流相量由 OA i 变化到 OB i , 即幅值不变 , 相位由β1→ 90°; 电压相量幅值不变 , 但相位由α1开始根据弱磁率的不同而具有不同的变化规律 1ξ=1时 , 随电流相量由 OA i 变化到 OB i , 电压相量由 OA u 变化到 OB u , 即随电流相位由β→ 90°, 电压相位也由α1→90°, 如图 2a 所示1ξ<1时 , 在整个弱磁区 , 电压相量相角先由α1增大到某一最大值αz , 然后再减少到 0, 变化轨迹如图 2b 所示 , 即电压相量由 OA u 变化到 OB u , 然后反转变化到 OC u 1而且电压相角为αz (即电压相量转折时的电流相角βz 只与弱磁率ξ有关 , 而与凸极率无关, βz 满足下式 :sin βz =ξ(8ξ>1时 , 在整个弱磁过程 , 电压相角由α1一直增大到 180°, 如图 2c 所示 1而且α达 90°时的电流相角βp 也与ρ无关 (由于α1可能大于 90°, 此时该点为假想点 , 且满足下式sin βp =ξ(9图 2恒转矩控制及普通弱磁控制时电压电流相量变化轨迹Fig. 2 Loci of voltage and current phasors of PMSM with constant torque control and ordinary flux 2weakening control 第 5期徐衍亮 :电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究 (一 4032. 2功率与电角速度之间的关系在普通弱磁控制下 , 电机电角速度与电流相量角之间的关系为 :ω=(L q i q 2+(Ψf +L d i d 2=(L q i s cos β 2+(Ψf -L d i s sin β2(10以标么值形式表示式 (10 为:ω3=ω/ωc =1/(ρξcos β 2+(1-ξsin β2(11此时功率标么值为 :P 3em =P em /P emN =ξcos φ(12计及恒转矩运行时功率的变化特征 , 可得 P em /P emN =f (ω/ωc 的变化曲线如图 3所示 11—ξ=3 2—ξ=2 3—ξ=1125 4—ξ=1 5—ξ=0. 909 6—ξ=0. 6677—ξ=01333图 3电磁功率与电角速度之间的关系Fig. 3 Characteristics of power versus electric angle velocity404山东大学学报 (工学版 2002年并且可以推得最高转速ω3max 、最高转速时的功率P 3em (ω=ωmax 和最大功率 P 3em max 分别为 :ω3 max =|1-ξ|ξ≠ 1∞ ξ=1(13P 3em (ω=ωmax = 0ξ≠ 11ξ=1(14P 3em max = ξξΦ1>1ξ>1(151 ξΦ1时 , 电机的最高转速、最高转速时的功率及最大功率仅决定于ξ, 与ρ无关 1因此 , 相同ξ下 , 电机功率特性曲线基本相同 [5]1凸极率仅对产生最大功率时的转速值有影响, ρ增大时该转速值降低 , 有利于提高电机的低速特性 1但当ξ较小时 (即永磁磁链比直轴磁链大很多, ρ对功率特性曲线影响很弱 , 这是由于磁阻功率比永磁功率更强地决定于电机电流的大小 [4]1所以在ξ较小时 , 有无凸极性对电机的功率特性影响可忽略不计 1同时可以看出 , 增大弱磁率ξ, 不但线性增加了最大功率 , 而且增加了电机的最高转速 , 在ξ=1时具有理想的最高转速 1因此拥有尽可能大的凸极率和弱磁率 , 且采用最大转矩电流控制同普通弱磁控制相结合的电流控制策略的永磁同步电动机 , 具有良好的功率特性 12 ξ>1时 , 首先 , 最高转速随ξ的增大而降低 , 且电机在相同ξ下的功率特性受凸极率影响 1其次最大功率与通入电流不再是线性关系 , 增加电机电流 (即增加ξ 并不能线性地增加电机的最大功率 , 功率的增加程度决定于ρ的大小 1ρ=1时功率表示为 :P em =ωΨf i q =Ψ1+((1/ξ-sin β /cos β 2 (16可以看出在sin β=1/ξ时获得最大电磁功率 , 表示为 :P em max =u lim Ψf /L =u lim i sN =P emN (17 此时增加电流 , 最大功率不变 1所以在ξ>1时 , 增大电流不但使调速范围变小 , 而且得不到与电流相应大小的最大功率 1因此当ξ>1时不宜采用普通弱磁控制 1但在ξ>1时 , 增大ξ, 不但最大功率增加 (尽管不是线性增加 , 而且发生最大功率时的转速降低 , 因此有利于提高电机的低速转矩 1参考文献[1] Mehrdad Ehsani , Khwaja M , Hamid A. Propulsion sys 2 tem design of electric and hybrid vehicles [J ].IEEE Trans. Ind. Electronics , 1997, 44(1 :19~27.[2] Morimoto S , Takeda Y , Hirasa T , Taniguchi K. Ex 2 pansion of operating limits for permanent magnet motor by current vector control considering inverter capacity [J]1IEEE Trans. on Ind. Application , 1990, 26(5 : 886~871.[3]唐任远 . 现代永磁电机理论与设计 [M ].北京 :机械工业出版社 ,1997.[4]郭振宏 . 宽恒功率调速范围主轴永磁同步电动机及其传动系统的研究[D ]1[博士学位论文 ], 沈阳 :沈阳工业大学 ,1999.[5] Morimoto S , Sanada M , Takeda Y. Inverter 2driven syn 2 chronous motor for constant power [J ].IEEE Trans. Ind. Magazine , 1996,19~24.[6] Schiferl R F , Lipo T A. Power capability of salient pole permanent magnet synchronous motor in variable s peed drive applications [J ].IEEETrans. Ins. A pplication , 1990,26(1 :115~123.[7] Chalmers B J , Musaba L , G osden D F. Variable 2fre 2 quency synchronous motor drives for electric vehicles[J]. IEEE Trans. Ind. Application , 1996, 32(4 :898~ 903.作者简介 :徐衍亮 , 男 ,1966年 12月生 , 博士 , 副教授 11989年、 1994年、2001年分别在山东工业大学、沈阳工业大学获得工学学士、工学硕士、工学博士学位 , 现在北京航空航天大学博士后流动站工作 , 主要研究方向 :特种电机及其控制 1第 5期徐衍亮 :电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究 (一405。
电动汽车内嵌式永磁同步电机全速弱磁控制方法研究
Ab s t r a c t : Mo t o r d r i v e s y s t e m i s a k e y t e c h n o l o g y f o r t h e d e v e l o p me n t o f e l e c t r i c a l v e h i c l e s ,p e r ma n e n t ma g n e t s y n c h r o n o u s mo t o r h a s b e c o me t h e ma i n s t r e a m o f t h e n e w e n e r g y v e h i c l e ri d v e mo t o r b e c a u s e i t s
摘
要 :本文对 内嵌 式永磁 同步 电机的弱磁 策略进行研 究,提 出了永磁 同步电机全 速范 围内的弱磁控制策略 。通过 对 内
嵌 式永磁 同步 电机 的数 学模型和 常规 矢量控 制方法的研 究 ,对 内嵌式永磁 同步电机全速 范围 内的运行工况进行 了分析 ,
将 内嵌式永磁 同步电机 的运行工 况划分为分为恒转矩运行 I 区、恒转矩运行 I I 区、弱磁 运行 的恒功 率 区和弱磁 运行 的 高 速 区四个 区域 。确定 了各个 区域 内的控制策略算 法以及 区域 间的过 渡条件 ,提 出了根据给定转矩和反馈转速 确定 内嵌式
下的控制模型 、多体 动力学软件 Re c u r Dy n下的虚拟样机 和 实时仿 真平 台t k T — L A B进行联合仿 真 ,验证弱磁控 制策略的 可行性。运 用实时仿 真平 台t k T — L B 、 Ma A d a b / S i mu l i n k实物仿 真平 台,对 带弱磁控 制的 矢量控 制 系统进行特性 分析 。 关键词 :内嵌 式永磁 同步电机 ;矢量控制 ;全速 范围;弱磁控制 ;联合仿真
永磁同步电机弱磁调速

永磁同步电机弱磁调速控制文献阅读报告专业:电气工程及其自动化学生姓名:学生学号:学生班号:本篇论文是从阅读文献报告的角度来解读论文的。
稀土永磁同步电机早在上世纪七十年代就开始出现,现在已被广泛使用,其具有重量轻、体积小、效率高、弱磁扩速能力强等一系列优点,成为航空、航天、武器装备、电动汽车等领域重要发展方向。
由于永磁同步电机磁场结构复杂,使得计算准确度差,磁极形状与尺寸的优化,调速性能等都是永磁电机设计的难点。
这些年来,如何提高永磁同步电机恒功率调速比的问题是研究的重点,永磁电机及其驱动器的设计成了电机领域研究的热点课题。
本文主要研究内容是对内置式永磁同步电机设计及弱磁性能的研究。
分析永磁同步电机(PMSM)数学模型的基础上,通过阐述弱磁调速的控制原理,提出了一种基于电流调节的PMSM定子磁链弱磁控制算法,有效地拓宽了恒功率调速比。
并在Matlab/Simulink环境下,构建了永磁同步电机弱磁控制系统的速度和电流双闭环仿真模型。
仿真结果证明了该控制系统模型的有效性,恒功率调速比达到了4: 1,为永磁同步电机弱磁调速控制系统的设计和调试提供了理论基础,有一定的实际工程价值。
关键词:内置式;永磁电机;弱磁控制;电流跟踪算法;仿真建模目录永磁同步电机弱磁调速控制文献阅读报告 (1)一、研究的问题 (4)二、研究方法 (5)2.1 永磁电机的数学模型 (5)2.2弱磁调速原理 (6)2.3 基于Matlab的PMSM弱磁控制系统仿真模型建立 (7)2.4 仿真结果 (11)三、解决效果 (12)3.1 结论 (12)3.2感悟与体会 (12)本次阅读文献报告的主要课题是研究对内置式永磁同步电机弱磁调速控制的研究,报告内容主要来自等,在写作过程中也参考了一些关于永磁同步电机弱磁调速控制方法设计以及弱磁性能研究等方面的资料现在从关注的问题、所用的研究方法及关注问题解决的效果三个方面来阐述报告内容。
一、研究的问题近年来,随着稀土永磁材料和电子功率器件的发展,永磁同步电机获得了广泛研究。
内置式永磁同步电动机弱磁调速优化控制
内置式永磁同步电动机弱磁调速优化控制闫娜云;宗剑【摘要】从永磁同步电机(PMSM)的矢量控制出发,提出了一种PMSM弱磁优化控制方法.内置式永磁同步电机(IPMSM)相对表贴式永磁同步电机弱磁能力强,调速范围宽,以IPMSM为对象,对弱磁调速进行了仿真与优化.PMSM在基速以下采用最大转矩电流比的恒转矩控制,减小了电机损耗,提高了逆变器的效率,在基速以上采用恒功率调速.直轴电流去磁调速结合交轴电流去磁调速的弱磁控制方式,提高了PMSM的功率因数,扩展了调速范围.针对弱磁环节转速的波动问题,在传统PI控制上做出改进,提出了模糊自整定PI的控制方式,提高了PMSM弱磁调速的性能.在MATLAB/Simulink中搭建仿真模型,验证了该控制方法的可行性.【期刊名称】《电机与控制应用》【年(卷),期】2018(045)010【总页数】5页(P24-28)【关键词】永磁同步电机;矢量控制;弱磁调速;模糊自整定PI【作者】闫娜云;宗剑【作者单位】上海应用技术大学电气与电子工程学院,上海201418;上海应用技术大学电气与电子工程学院,上海201418【正文语种】中文【中图分类】TM3510 引言永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)作为一种高效的驱动系统,在电动汽车行业得到广泛应用。
钕铁硼等剩磁高、矫顽力大的稀土永磁材料的使用提高了PMSM的各项性能,促进了PMSM的发展[1]。
PMSM具有功率密度高、损耗小、效率高、转矩惯量大、振动噪声小等优点,受到国内外电动汽车界的高度重视,成为最具竞争力的电动车电驱动系统中的主流电机。
由于永磁体磁链恒定的限制,PMSM的弱磁调速比其他电机复杂,此外电动汽车用PMSM要求在恒转矩区具有输出恒定转矩的特点,能够平稳、快速地跟踪输入指令,并且要求对位置、转矩脉动等因素的控制精度高,保证电动汽车的启动和爬坡等功能;在恒功率区,要求具备很宽的速度范围,保证电动汽车的加速等功能[2]。
电动汽车用永磁同步电动机弱磁控制系统研究
Research on weak m agnetic control system of perm anent m agnet synchronous m otor for electric cars
M A 一 .ZH U M ing-xing
( eⅣ0.31 Institute ofChina A erospace Science& IndustryGroup Corporation,Beo'ing100074,China)
1 引言
用 于 电 动 汽 车 的永 磁 同 步 电 动 机 要 求 能 够 频繁 地起动 、停 车或加 减速 ,还要求能 够在低速 或 者 爬 坡 时输 出高 转 矩 ,并 要 求 能 够 在 宽 转 速 范 围 内平 滑地 调 节 速度 和转 矩 。由于 电动 汽 车 的 电 机 控 制 器 的 直 流 侧 输 入 电压 所 引 起 的 电流 调 节 器的饱和特性 ,电机转矩和功率会过早地下 降 , 较强 的弱磁性 能可 以在逆 变器容量 不变 的前提 下 提 高 车 辆 的起 动 加 速 能 力 和 爬 坡 能力 ,并 拓 宽 车辆 的转速 调节范 围 ,因此 ,对 电动汽 车用永磁 同步 电动 机进行弱磁 控制 且拓宽其 转速 调节范
马立 丽 ,朱 明星
(中国航 天科工 集团31研究所 ,北京 100074)
摘要 :电动汽 车用永磁 同步电动机在基速 以下恒转矩运行 ,在基速 以上恒功 率扩速运行。在 分析永磁 同步 电
动机数 学模型的基础上 ,设计 了一种具有转速控 制和转矩控制两种工作模式的弱磁控 制 系统。该 系统在基于
围具有 过增加定 子的直 轴 电
流 并 利 用 直 轴 的 电 枢 反应 使 电机 气 隙 磁 场 减 弱 , 达到等效于减弱磁场 的效果 ,从而达到弱磁增速 的 目的 。根 据这 一基本思路 ,学 者们提 出了众多 方 案用于改善 永磁 同步 电机 的弱磁 控制性 能 。Bimal K.Bose[ 提 出 了 6步 电压 法 ,通 过 改 变 电机 的 功 角来达到改变转矩 的 目的 ,该方案对于电机参数 的 依 赖 性 小 ,且 可实 现对 直 流母 线 电压 的最 大 利 用 。为 了解 决 电机从 恒转矩 工况 到弱磁 工况 的切换 问题 ,Thomas M. ]提出了前馈弱磁方案。J.M.
一种新的内置式永磁同步电机弱磁调速控制方法
一种新的内置式永磁同步电机弱磁调速控制方法摘要随着永磁同步电机在工业和家用领域的广泛应用,对其高效节能和高性能调速控制的需求也越来越重要。
本文提出了一种新的内置式永磁同步电机弱磁调速控制方法,通过对电机的电流和转矩进行实时监测和控制,实现了有效的弱磁运行。
该方法能够在降到弱磁状态的同时保持较高的效率和稳定性。
1.引言永磁同步电机具有高效率、高功率因数、高性能等特点,已广泛应用于多种工业和家用领域。
然而,传统的调速控制方法在弱磁状态下会导致效率的降低和性能的损失。
因此,如何实现高效率和高性能的弱磁调速控制成为一个研究热点。
内置式永磁同步电机是一种新型的永磁同步电机结构,其磁极与转子磁极一体化。
本文提出的弱磁调速控制方法主要通过控制电机的电流和转矩来实现。
2.1电流控制在弱磁状态下,电机的电流响应特性发生变化,会导致电机损耗的增加和效率的降低。
因此,通过实时监测和控制电机的电流,可以减少损耗并提高效率。
本文提出了一种基于模型预测控制(MPC)方法的电流控制策略。
该方法通过准确建立电机的数学模型,预测电机的电流响应,并根据预测结果进行实时调整。
2.2转矩控制弱磁状态下,电机的转矩输出能力减弱,容易导致性能下降和效率降低。
为了提高电机的转矩输出能力,本文提出了一种基于磁链调整的转矩控制方法。
该方法通过实时监测电机的磁链,调整电机的电流和磁场分布,从而实现良好的转矩输出。
3.实验结果和讨论通过对一台内置式永磁同步电机进行实验,验证了本文提出的弱磁调速控制方法的有效性和可行性。
实验结果表明,该方法能够在降到弱磁状态的同时保持较高的效率和稳定性。
4.总结本文提出了一种新的内置式永磁同步电机弱磁调速控制方法,通过对电机的电流和转矩进行实时监测和控制,实现了有效的弱磁运行。
该方法能够在降到弱磁状态的同时保持较高的效率和稳定性,具有很大的应用潜力。
刍议内置式永磁同步电机弱磁控制
刍议内置式永磁同步电机弱磁控制摘要:本文主要对内置式永磁同步电机弱磁控制进一步分析。
内置式永磁同步电机具有高效率、高功率密度、高可靠性、结构简单、控制灵活、易于实现等显著优势,使其在很多高精度工业场合逐步取代传统交流感应电机。
关键词:内置式永磁同步电机;弱磁控制;结构;发展引言:随着对内置式永磁电机(IPMSM)应用的深入研究,其控制技术逐步发展成熟,目前国内已开发出高速铁路牵引用永磁同步电机。
内置式永磁同步电机因其高转矩功率密度,高功率因素,恒功率宽调速等优点,在电动汽车、风力发电、轨道牵引、电主轴等领域得到了广泛应用由于弱磁技术的应用可以拓宽电机运行的速度范围,因此开展内置式永磁同步电机弱磁控制的研究具有重要的实际意义。
一、永磁同步电机弱磁技术发展随着高磁能积永磁体及功率变换器件和晶闸管整流器的出现,以永磁体作为励磁源的直流电机得到了快速的发展,产生了不同种类的永磁同步电机。
按定子输入的电流类型不同可分为永磁直流电机和永磁交流电机两类,而永磁直流电机由于仍装有换向器和电刷,转速受到限制,一般只适用于小功率场合;按供电波形不同,可分为矩形波永磁同步电机又称作无刷直流电机和正弦波永磁同步电机两类,其中矩形波永磁同步电机由于其换相引起的转矩脉振,使转矩的稳定性和动态性能稍差,调速范围较窄,多在运动性能要求不高的场合实用;按电枢绕组位置的可分为内转子式和外转子式,外转子永磁同步电机的电动机转动惯量比内转子式的大,还可以把电枢铁心直径做的更大,来让电动机的效率和输出功率在不稳定负载下提高;按永磁体在转子上位置可分为表贴式永磁同步电机、表面嵌入式永磁同步电机和内置式永磁同步电机。
二、永磁同步电机的结构磁同步电动机组成部件由定子、转子和端盖等构成。
永磁同步电机的定子采用叠片结构,与普通感应电动机基本相同,但转子部分用永磁体代替了电励磁绕组。
定子绕组通常采用星形接法,PMSM电枢绕组多采用分布短距绕组,而BLDCM多采用的集中整距绕组;永磁同步电机的转子上的永磁体安装方式的不同会导致电动机的运动性能和使用场合的不同,根据转子上永磁体的位置,转子的磁路结构可以表贴式、嵌入式、内置式,而内置式永磁同步电机根据气隙磁场方向又分为径向磁场和切向磁场。
电动汽车内嵌式永磁同步电机全速弱磁控制方法研究

电动汽车内嵌式永磁同步电机全速弱磁控制方法研究高润泽;翟丽;苏丽伟【摘要】本文对内嵌式永磁同步电机的弱磁策略进行研究,提出了永磁同步电机全速范围内的弱磁控制策略.通过对内嵌式永磁同步电机的数学模型和常规矢量控制方法的研究,对内嵌式永磁同步电机全速范围内的运行工况进行了分析,将内嵌式永磁同步电机的运行工况划分为分为恒转矩运行I区、恒转矩运行II区、弱磁运行的恒功率区和弱磁运行的高速区四个区域,确定了各个区域内的控制策略算法以及区域间的过渡条件,提出了根据给定转矩和反馈转速确定内嵌式永磁同步电机交直轴电流的参考值的电流控制策略.在Matlab/Simulink下,对各个运行区域的控制策略进行建模,并针对稳态负载和动态负载两种情况进行了仿真,仿真结果验证了各个区域内弱磁控制策略的可行性.运用Matlab/Simulink下的控制模型、多体动力学软件RecurDyn下的虚拟样机和实时仿真平台RT-LAB进行联合仿真,验证弱磁控制策略的可行性.运用实时仿真平台RT-LAB、Matlab/Simulink和Labview构建矢量控制系统半实物仿真平台,对带弱磁控制的矢量控制系统进行特性分析.【期刊名称】《交通节能与环保》【年(卷),期】2016(012)005【总页数】9页(P20-28)【关键词】内嵌式永磁同步电机;矢量控制;全速范围;弱磁控制;联合仿真【作者】高润泽;翟丽;苏丽伟【作者单位】交通运输部公路科学研究院,北京 100088;北京理工大学机械与车辆学院,北京 100081;一汽—大众有限公司,吉林长春 100017【正文语种】中文【中图分类】U121永磁同步电机体积小、惯性低、响应快,具有电机功率密度高、能量密度高、低速转矩密度高、效率高、可靠性高等诸多优点。
这类电机非常适应于电动汽车的驱动系统,成为现在新能源车辆驱动电机的主流。
永磁同步电机常用的控制策略有变压变频控制、磁场定向控制、直接转矩控制。
永磁同步电机弱磁控制的控制策略研究
永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用。
本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统.矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能.1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a g e s p a c e v e c t o r p u l s e w i d t h mo d u l a t i o n( S V P WM)t e c h n o l o g y . F i n a l l y , t h e r e l i a b i l i t y o f l f u x — w e a k e n i n g c o n t r o l u s i n g t h e
WE NJ i a n - p i n g ,C AO Bi n g — g a n g
( 1 . X i a n U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y. X i a n J i a o t o n g U n i v e r s i t y , X i a n 7 1 0 0 4 9, C h i n a )
触 持电棚 2 0 l 5 年 第 4 3 卷 第3 期
… 一… … … … … … … … … … … … … … … … … … … … … … - … … … … … … … … … … … … … - ・ c , r / /
驱动
… …
电动 车 用 内嵌 式 永磁 同步 电动 机 弱 磁 调 速 研 究
文建平 ,曹秉刚
( 1 . 西 安科 技大学 , 西安 7 1 0 0 5 4 ; 2 . 西安交通大学 , 西安 7 1 0 0 4 9 )
摘
要: 电动车用 内嵌式永磁 同步电动机驱动系统在 车载 电源 电压限制 下 , 需 要采用 弱磁调 速控制 策略提高
电机的转速范 围满 足电动汽车 的行驶要求 。通过对指 令信 号与反馈 信号 的误差 值进行计 算 , 获得 电压参考 值 , 并
u l a t i o n r a t e i s d e i f n e d a s r a t i o o f v o l t a g e r e f e r e n c e a n d v o h a g e D C, w h i c h i s c o m b i n e d w i t h v o l t a g e s p e e d m o d e l t o j u d g e t h e
u nn r i ng s t a t e o f e l e c t ic r v e h i c l e a nd c o n t r o l t h e f l u x-we a ke ni ng o f I PMSM . Th e s wi t c h c o nt r o l s i na g l s a r e g e n e r a t e d by v o l t —
与车载直流 电压 比较得 到变调率 , 建立 电压 转速模型 , 联合 变调 率判 断电动车 的运行状 态 , 采 用空 间矢 量脉宽调制 ( S V P WM) 技术产生开关控制信号 , 进行永磁 同步 电动 机的弱磁 调速 , 实验分析验证 了该 方法弱磁扩速的可靠性 。
关键词 : 内嵌式永磁 同步 电动 机 ; 弱磁 ; 调速 ; 电动 车
A b s t r a c t : I n i n t e r i o r p e r ma n e n t ma g n e t s y n c h r o n o u s mo t o r ( I P MS M)d i r v e s y s t e m f o r e l e c t r i c v e h i c l e , i t i s n e c e s s a r y
中 图分 类 号 : T M3 5 1 ; T M3 4 1 文献标识码 : A 文章 编 号 : 1 0 0 4 — 7 0 1 8 ( 2 0 1 5 ) 0 3 — 0 0 4 9 — 0 2
Re s e a r c h o n F l u x - We a k e n i n g Co n t r o l o f I PM S M Dr i v e S y s t e m f o r El e c t r i c Ve h i c l e
p r o p o s e d me t h o d i s d e mo n s t r a t e d t h o u g h t h e e x p e ime r n t s .
v e hi c l e p o we r s up pl y.Vo l t a g e r e f e r e nc e i s o b t a i n e d by c a l c ul a t i n g e I T 0 r be t we e n r e f e r e n c e s i g n a l a n d f e e d b a c k s i na g 1 .Mo d—