广播星历计算速度和加速度的扩展算法
从广播星历计算卫星位置
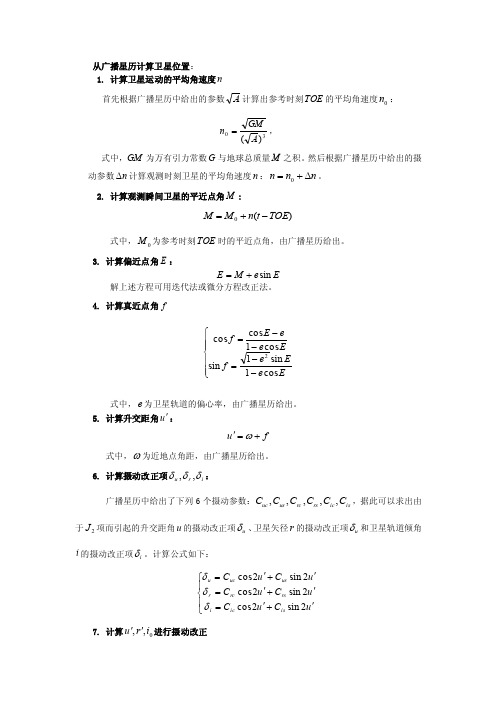
从广播星历计算卫星位置: 1. 计算卫星运动的平均角速度n首先根据广播星历中给出的参数A 计算出参考时刻TOE 的平均角速度0n :30)(A GM n =,式中,GM 为万有引力常数G 与地球总质量M 之积。
然后根据广播星历中给出的摄动参数n ∆计算观测时刻卫星的平均角速度n :n n n ∆+=0。
2. 计算观测瞬间卫星的平近点角M :)(0TOE t n M M -+=式中,0M 为参考时刻TOE 时的平近点角,由广播星历给出。
3. 计算偏近点角E :E e M E sin +=解上述方程可用迭代法或微分方程改正法。
4. 计算真近点角f⎪⎪⎩⎪⎪⎨⎧--=--=E e E e f Ee e Ef cos 1sin 1sin cos 1cos cos 2式中,e 为卫星轨道的偏心率,由广播星历给出。
5. 计算升交距角u ':f u +='ω式中,ω为近地点角距,由广播星历给出。
6. 计算摄动改正项i r u δδδ,,:广播星历中给出了下列6个摄动参数:is ic rs rc us uc C C C C C C ,,,,,,据此可以求出由于2J 项而引起的升交距角u 的摄动改正项u δ、卫星矢径r 的摄动改正项u δ和卫星轨道倾角i 的摄动改正项i δ。
计算公式如下:⎪⎩⎪⎨⎧'+'='+'='+'=u C u C u C u C u C u C is ic irs rc r us uc u 2sin 2cos 2sin 2cos 2sin 2cos δδδ 7. 计算0,,i r u ''进行摄动改正⎪⎪⎩⎪⎪⎨⎧-++=+-=+'=+'=)()cos 1(0TOE t dt di i i E a r r u u i r r u δδδδ 式中:a 为卫星轨道的长半径,2)(A a =,0i 为TOE 时刻的轨道倾角,由广播星历中的开普勒六参数给出,dtdi为i 的变化率,由广播星历中的摄动九参数给出。
GPS广播星历计算卫星位置和速度-Read

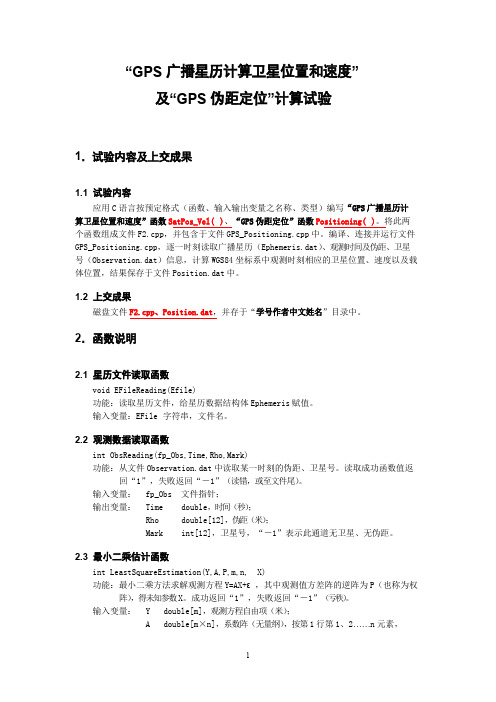
“GPS广播星历计算卫星位置和速度”及“GPS伪距定位”计算试验1.试验内容及上交成果1.1 试验内容应用C语言按预定格式(函数、输入输出变量之名称、类型)编写“GPS广播星历计算卫星位置和速度”函数SatPos_Vel( )、“GPS伪距定位”函数Positioning( )。
将此两个函数组成文件F2.cpp,并包含于文件GPS_Positioning.cpp中。
编译、连接并运行文件GPS_Positioning.cpp,逐一时刻读取广播星历(Ephemeris.dat)、观测时间及伪距、卫星号(Observation.dat)信息,计算WGS84坐标系中观测时刻相应的卫星位置、速度以及载体位置,结果保存于文件Position.dat中。
1.2 上交成果磁盘文件F2.cpp、Position.dat,并存于“学号作者中文姓名”目录中。
2.函数说明2.1 星历文件读取函数void EFileReading(Efile)功能:读取星历文件,给星历数据结构体Ephemeris赋值。
输入变量:EFile 字符串,文件名。
2.2 观测数据读取函数int ObsReading(fp_Obs,Time,Rho,Mark)功能:从文件Observation.dat中读取某一时刻的伪距、卫星号。
读取成功函数值返回“1”,失败返回“-1”(读错,或至文件尾)。
输入变量:fp_Obs 文件指针;输出变量:Time double,时间(秒);Rho double[12],伪距(米);Mark int[12],卫星号,“-1”表示此通道无卫星、无伪距。
2.3 最小二乘估计函数int LeastSquareEstimation(Y,A,P,m,n, X)功能:最小二乘方法求解观测方程Y=AX+ε,其中观测值方差阵的逆阵为P(也称为权阵),得未知参数X。
成功返回“1”,失败返回“-1”(亏秩)。
输入变量:Y double[m],观测方程自由项(米);A double[m×n],系数阵(无量纲),按第1行第1、2……n元素,第2行……顺序存放;P double[m],权矩阵对角线元素,0或1(无量纲);m int,观测值个数;n int,未知参数个数;输出变量:X double[n],未知参数(米)。
GPS广播星历计算卫星位置和速度

GPS广播星历计算卫星位置和速度GPS(全球定位系统)是一种通过卫星定位的技术,它利用卫星发射的广播星历来计算卫星的位置和速度。
星历数据是需要事先计算和上传给卫星的。
在GPS系统中,有31颗运行在中轨道上的卫星,其中至少有24颗是激活状态的。
这些卫星分布在不同的轨道上,每个轨道上约有4颗卫星。
卫星轨道分为6个球形环,每个环的倾角不同,倾角越大表示距离地球赤道越远。
每颗GPS卫星都具有精确的时钟,它们通过广播信号发送自身的位置和速度信息。
这些广播信号被接收器接收后,通过计算接收时间差来确定卫星与接收器之间的距离。
利用三个以上的卫星的广播信号,可以计算出接收器所在的位置。
星历数据是卫星的位置和速度信息,它用于计算接收器附近的卫星位置和速度。
星历数据包括每颗卫星的轨道参数(半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、运动角频率)、卫星钟差和卫星偏差改正参数等。
星历数据的计算是一个复杂的过程,需要考虑多个因素。
首先,需要从测量数据中估算卫星位置和速度。
接着,根据卫星轨道的数学模型和测量数据,通过插值和拟合等算法计算出卫星的位置和速度数据。
最后,通过计算误差和改正项进行数据校正。
这些校正项包括大气延迟、钟差、轨道摄动等。
星历数据的计算过程是集中在地面控制站完成的,然后通过双向通信链路上传给卫星。
卫星接收到星历数据后,会将其存储在内部存储器中,并通过广播信号发送给地面的接收器。
在接收器接收到卫星广播信号后,会利用星历数据来计算卫星与接收器之间的距离。
首先,接收器会粗略估算卫星位置,然后通过星历数据进行细化校正,最终得到精确的卫星位置和速度信息。
利用卫星位置和速度信息,接收器可以计算出自身的位置。
通过接收多个卫星的广播信号,接收器可以确定自身在地球的经度、纬度和海拔高度。
在接收器上,还可以通过计算卫星位置的变化来确定速度。
通过不同时刻测量卫星位置的变化,可以计算出接收器的速度矢量。
总结起来,GPS广播星历是用于计算卫星位置和速度的关键数据。
brdc广播星历格式

brdc广播星历格式摘要:1.广播星历简介2.广播星历格式详解3.广播星历应用领域4.广播星历在我国的发展5.总结正文:广播星历(BRDC)是一种用于描述卫星轨道及其周围空间环境信息的数据格式。
它主要由全球定位系统(GPS)、全球导航卫星系统(GLONASS)以及其他卫星导航系统使用。
广播星历数据在全球范围内被广泛应用于导航、定位、遥感等领域,为各类卫星应用提供了重要的数据支持。
一、广播星历简介广播星历是卫星系统向用户广播的一种数据产品,主要包括卫星轨道参数、卫星钟差、卫星发射时间等信息。
它通过卫星信号传输到用户接收设备,用户接收设备接收到这些数据后,可以计算出卫星的位置、速度等信息,从而实现定位、导航等功能。
二、广播星历格式详解广播星历格式主要包括以下几个部分:1.文件头:包括文件版本、数据产生时间、数据更新周期等信息。
2.卫星信息:包括卫星编号、轨道参数、卫星钟差等。
3.误差参数:包括卫星轨道误差、卫星钟误差等。
4.历元:包括时间标签、卫星位置、卫星速度等。
5.校验和:用于检验数据传输的正确性。
三、广播星历应用领域广播星历数据在我国得到了广泛的应用,主要包括:1.导航定位:广播星历数据是导航定位系统的基础数据,为各类导航定位设备提供了卫星轨道、卫星钟等信息,实现了高精度定位、导航等功能。
2.遥感:广播星历数据可用于遥感卫星的数据处理,提高遥感图像的定位精度。
3.通信:广播星历数据可用于卫星通信系统的链路计算,保证通信质量。
4.科学研究:广播星历数据可用于天文、地球物理、大气科学等领域的科学研究。
四、广播星历在我国的发展我国高度重视卫星导航领域的发展,不断加强对广播星历数据的研究和应用。
我国已经建立了完整的卫星导航系统,并实现了全球覆盖。
同时,我国还积极开展广播星历数据的国产化工作,提高我国在卫星导航领域的自主创新能力和核心竞争力。
五、总结广播星历作为一种重要的卫星导航数据格式,为全球卫星导航应用提供了关键的数据支持。
基于广播星历参数的卫星自主导航算法_图文(精)

一E~山654321仃侣帖他毛悦等.中国科学:物理学力学天文学2015年第45卷第7期链路拓扑,单星链路数分别为3,4,8和UHF链路(约为15).计算结果URE和位置统计见图8和9.其中3链路方案即单星保留两条同轨和一条异轨链路.3链加入10%光压误差,0.1m测量误差。
采样间隔取为20min,UHF测量体制下,对比了1个锚固站与3个锚固站的定轨精度.URE及位置误差统计见图10和11.对比4.4节结果,虽然当链路数达到一定程度,增加星间链路已无法进一步提高定轨精度,但增加锚固站在控制星座旋转方面还是起到了一定的作用,路方案在一个锚固站支持下无法完成定轨,由此图8和9中的结果为将锚固站增加至3个的结果.由图中可以看出,4链路+1锚固站下定轨精度较低,是本算法链路数的下限,8链路与UHF链路结果基本类似,即当链路数增大到一定程度,再增加链路数对定轨将1个锚固站增加到3个,URE及位置精度分别提高了0.21TI和0.5rn.精度不能起到有效的提高的作用,仅能从测量的可靠性上分析其必要性.4.6测量误差影响分析为分析测量误差对定轨精度的影响,本文在加入10%光压误差,1个锚固站,20min数据采样间隔,UHF测量体制下,将星间链路测量误差分别设定为一E一山31111000003324.5锚固站个数影响分析为分析锚固站个数对定轨精度的影响,本文在208佰佃∞ ∞ :;;∞ ∞ ;20104O812PRN16202401040812PRN162024图8(网络版彩图)不同链路数URE统计Figure8(Coloronline)UREstatisticsofdifferentlinknumber图10(网络版彩图)不同锚固站数URE统计Figure10(Coloronline)UREstatisticsofdifferentstationnumber01040812PRN16202401040812PRN162024图9(网络版彩图)不同链路数位置误差统计Figure9(Coloronline)Positionerrorofdifferentlinknumber图11(网络版彩图)不同锚固站数位置误差统计Figure11(Coloronline)Positionerrorofdifferentstationnumber079512—6毛悦等.中国科学:物理学力学天文学2015年第45卷21098765432第7期1098765430.1m,0.5n,进行定轨比对计算,结果如图1I2和l3所示.增加测量误差使URE及位置误差分别增大了160,41TI和1.1in.但定轨URE也均保持在31TI以内5结论(1)本文针对卫星自主导航体制,提出了一种以卫星长期预报星历为基础,以广播星历参数为变1514量,由观测数据直接获取广播星历修正结果的集中13式运动学定轨方法,该方法无需轨道积分运算,将定轨与星历拟合合并为一步进行,降低了数据处理计算量,为集中式定轨方法应用于星载处理提供了可能.121110(2)该方法直接在地固系下进行轨道计算,不再进行惯性系与地固系问的坐标转换,由此无需注入01040812PRNO9162O24高精度EOP预报参数,而锚固站设计可以起到固定空间基准作用.在一定程度上降低了星地数传的压力.图12(网络版彩图)不同测量误差定轨URE统计Figure12error.(Coloronline)UREstatisticsofdifferentmeasurement(3)与传统依靠长期预报轨道约束星座整体旋转的方法相比,该方法仅引用了长期预报星历中对轨道影响量级较小的轨道长期变化率参数和短周期变化参数,定轨结果无随时间逐渐增大的现象.f4)该方法在现有卫星轨道60d长期预报精度条件下,可满足URE1rn、位置3ITI的定轨精度.(5)该方法在4h弧段内可将数据采样间隔放宽至20min,有效减低了自主导航对星间链路测量频度及数据处理频度的要求.(6)该方法最低链路要求为单星4链路+1个锚固站.增加锚固站数量可在一定程度上提高星座整01040812PRN162024体旋转的控制能力.(7)该方法对星间链路测量误差的上限为0.5n.I在该测量精度下,定轨位置误差将达到4in,URE为3ITI图13(网络版彩图)不同测量误差定轨位置误差统计Figure13(Coloronline)Positionerrorofdifferentmeasurementerror.参考文献1CaiZW,HatrCH,ChenJP,eta1.Constellationrotationerroranalysisandcontrolinlong—termautonomousorbitdeterminationorfnavigationsatellite(inChinese).JAstronaut,2008,29:522—528[蔡志武,韩春好,陈金平,等.导航卫星长期自主定轨的星座旋转误差分析与控制.字航学报,2008,29:522—52812刘林,刘迎春.关于星星相对测量自主定轨中的亏秩问题.飞行器测控学报,2000,29:13-163YangL,GunFX,WenYL,eta1.Analysisofautonomousorbitdeterminationfornavigationconstellationwithoneanchorstation(inChinese).JSpacecrTT&CTechnol,2013,32:444_448[杨力,郭飞霄,文援兰,等.单锚固站辅助导航星座自主定轨分析.飞行器测控学报,2013,32:444—4481079512—7毛悦等.中国科学:物理学力学天文学2015年第45卷第7期4RajanJA,BrodieP,RawiczH.ModernizingGPSautonomousnavigationwithanchorcapability.In:TheProceedingsof16thInternationalTechnicalMeetingoftheSatelliteDivisionofTheInstituteofNavigation.Portland,2003.1534—15425RajanJA.HighlightsofGPSII—Rautonomousnavigation.In:ION58thAnnualMeeting/C1GTF21stGuidanceTestSymposium.Albuquerque,2002.354-3636ZhengJJ,LinYM,ChenZG,eta1.GPScrosslinktechnologyandautonomousnavigationalgorithmanalysis(inChinese).SpacecrEng,2009,18:28—35f郑晋军,林益明,陈忠贵,等.GPS星间链路技术及自主导航算法分析.航天器工程,2009,18:28—35】7宋小勇.COMPASS导航系统卫星定轨研究.博士学位论文.西安:长安大学,20098LinYM.Qinzz.ChuHB,eta1.Asatellitecrosslink—basedGNSSdistributeautonomousorbitdeterminationalgorithm(inChinese).JAstronaut,2010,9:2088—2094f林益明,秦子增,初海彬,等.基于星间链路的分布式导航自主定轨算法研究.宇航学报,2010,9:2088—2094】9SongXY,MaoY,JiaXL,eta1.Thedistibrutedprocessingalgorithmforautonomouslyupdatingtheephemerisofnavigationsatellitebyinte ̄satellitelinks(inChinese).GeomatInformSeiWuhanUniv,20lO,35"1162—1164【宋小勇,毛悦,贾小林,等.基于星间测距的分布式自主星历更新算法.武汉大学学报(信息科学版),2010,35:1162—1164】10朱俊.基于星间链路的导航卫星轨道确定及时间同步方法研究.博士学位论文.长沙:国防科学技术大学,201l11常家超,尚琳,李国通.自主导航卫星星上广播星历拟合算法研究.第五届中国卫星导航学术年会电子文集.南京,201412ChenZG,LiuGM,LiaoY,eta1.Autonomouslyupdatedbroadcastephemerisalgorithm(inChinese).JNatUnivDefenceTechnol,2011,33:1_4【陈忠贵,刘光明,廖瑛,等.广播星历参数星上自主拟合算法.国防科技大学学报,2011,33:1-4】13CuiXQ,JiaowH,JiaXL,eta1.ComparisonsoftwokindsofGPSbroadcastephemerisparametersalgorithms(inChinese).ChinJSpaceSci,2006,26:382—387[崔先强,焦文海,贾小林,等.两种GPS广播星历参数算法的比较.空间科学学报,2006,26:382—387]14WangHH,ChenZG,ChuHB,eta1.On-boardautonomousorbitpredictionalgoirthmfornavigationsatellites(inChinese).JAstronaut,2012,33:1019—1026[王海红,陈忠贵,初海彬,等.导航卫星星载自主轨道预报技术.宇航学报,2012,33:1019—1026115LiZH.GongXY.LiuWK.InlfuenceoferrorandapiroriinformationoftoAODofnavigationsatellites(inChinese).GeomatInformSciWuhanUniv,2011。
GPS广播星历参数说明
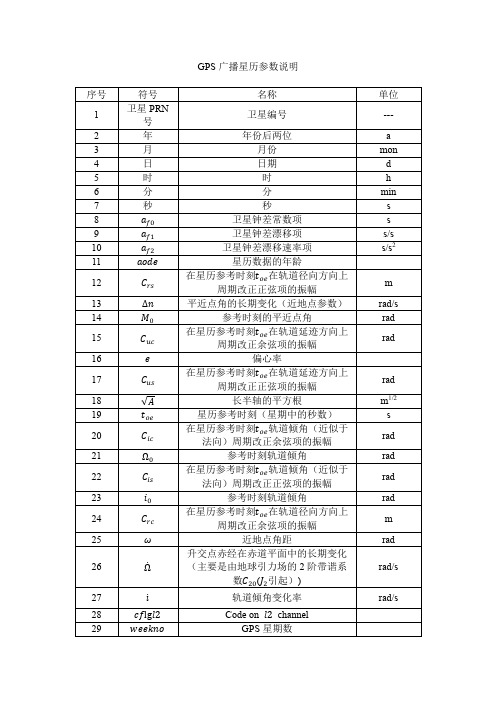
序号
符号
名称
单位
1
卫星PRN号
卫星编号
---
2
年
年份后两位
a
3
月
月份
mon
4
日
日期
d
5
时
时
h6Leabharlann 分分min
7
秒
秒
s
8
卫星钟差常数项
s
9
卫星钟差漂移项
s/s
10
卫星钟差漂移速率项
s/s2
11
星历数据的年龄
12
在星历参考时刻 在轨道径向方向上周期改正正弦项的振幅
m
13
平近点角的长期变化(近地点参数)
rad/s
28
Code on channel
29
GPS星期数
30
P data flag
31
本广播星历精度指标
m
32
卫星是否健康指标
33
电离层群延迟改正参数
s
34
卫星钟数据年龄
35
信息传送时间(与接收机对接收到的卫星信号解码有关)
s
rad/s
14
参考时刻的平近点角
rad
15
在星历参考时刻 在轨道延迹方向上周期改正余弦项的振幅
rad
16
偏心率
17
在星历参考时刻 在轨道延迹方向上周期改正正弦项的振幅
rad
18
长半轴的平方根
m1/2
19
星历参考时刻(星期中的秒数)
s
20
在星历参考时刻 轨道倾角(近似于法向)周期改正余弦项的振幅
rad
21
导航卫星速度和加速度的计算方法及精度分析

导航卫星速度和加速度的计算方法及精度分析李显;吴美平;张开东;曹聚亮;黄杨明【期刊名称】《测绘学报》【年(卷),期】2012(041)006【摘要】系统分析和总结基于广播星历和精密星历的导航卫星速度和加速度的计算方法,包括:①基于广播星历的公式法;②基于导航卫星位置序列的数值差分法;③基于导航卫星位置序列的解析差分法。
首先在基于广播星历的公式法中,推导出Kepler根数型、GEO型、位置一速度型等3类广播星历计算卫星速度和加速度的解析计算公式,通过比较表明:①广播星历解析公式总体计算精度较低;②位置一速度型广播星历的加速度计算精度高,而Kepler型广播星历的速度计算精度高;③高轨道卫星的速度、加速度计算精度优于中轨卫星。
进一步分析基于精密星历的数值差分法和解析差分法的卫星速度和加速度的计算方法。
两种方法的比较研究表明,解析差分法虽然在计算效率上具有优势,但利用短期位置序列建立的解析模型难以表达卫星的真实轨道特征,导致计算的卫星速度较数值差分法低,但两者的加速度计算精度相当。
最后通过来自于连续运行参考系统(CONtinuesoperationalreferencesystem,CORS)站点上的实测数据对各方法的计算精度进行评估和比较,结果表明数值差分法具有最高的速度和加速度计算精度。
【总页数】9页(P816-824)【作者】李显;吴美平;张开东;曹聚亮;黄杨明【作者单位】国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073【正文语种】中文【中图分类】P228【相关文献】1.基于广播星历的卫星速度和加速度实时计算方法 [J], 孙伟;孔莹;段顺利;丁伟2.高度重视加强领导密切协作圆满完成工业发展速度计算方法改革试行工作——访自治区工业发展速度计算方法改革领导小组组长、自治区统计局副局长 [J], 周鸿恩3.用瞬心和速度投影定理的解析法确定机构速度和加速度 [J], 钱安4.速度、速度变化量和加速度的比较 [J], 李艳英5.浅议速度和加速度的教学 [J], 刘海;韩文娟;肖立勇因版权原因,仅展示原文概要,查看原文内容请购买。
广播星历的名词解释

广播星历的名词解释广播星历是一种用于卫星导航系统的重要数据源,广泛应用于全球定位系统(GPS)和其他卫星导航系统中。
它提供了卫星位置、速度以及时间等信息,帮助用户确定其精确的地理位置和导航方向。
在本文中,我们将详细解释广播星历的含义、作用以及相关的技术原理,以帮助读者更好地理解广播星历的重要性。
一、广播星历的定义广播星历指的是卫星导航系统通过无线电信号将卫星的轨道参数等信息广播到用户终端,以便用户准确进行定位和导航的一种数据格式。
它包含了卫星编号、卫星位置、速度、钟差等信息,以及其他一些校验和控制数据。
用户通过接收卫星发送的广播星历数据,根据其中的信息进行计算,从而确定其准确的地理位置。
二、广播星历的作用广播星历在卫星导航系统中起着至关重要的作用。
首先,它是用户终端确定自身位置所必需的数据源。
用户终端通过接收到的广播星历数据,根据卫星的位置和其他参数,进行复杂的计算和推算,从而确定自身的地理位置。
其次,广播星历还提供了卫星的速度和时间等信息,为用户终端提供了更为准确和可靠的导航指引。
三、广播星历的技术原理广播星历的传输技术主要借助无线电信号,通过卫星发射到空中,由用户设备接收并解码。
卫星导航系统通过卫星上搭载的精密钟表不断生成星历数据,并定期对其进行更新。
然后,系统将更新后的星历数据编码成特定格式,通过卫星的无线电信号进行广播。
用户设备接收到信号后,通过信号解码器将广播星历数据还原,并基于其中的信息进行位置计算。
四、广播星历的特点广播星历具有以下几个特点。
首先,广播星历的数据是间接测量而得,其定位精度受到卫星本身定位误差、卫星钟差以及传输和接收误差等多种因素的影响。
因此,在实际应用中,需要对广播星历数据进行相应的纠正和校准。
其次,广播星历具有广播性质,任何连接到卫星导航系统的用户终端都可以接收到相同的广播星历数据,这意味着无需与地面的信息中心进行实时的数据交换。
最后,广播星历具有一定的延迟性,即卫星发送的星历数据需要经过一定的传输时间才能到达用户终端,因此,在位置计算时需要考虑这种延迟。
星体运动轨迹计算公式推导与应用实例

星体运动轨迹计算公式推导与应用实例一、引言星体运动是宇宙中最基本、最普遍的现象之一。
研究星体运动轨迹的计算公式对于天文学、航天学等领域具有重要意义。
本文将介绍星体运动的数学模型以及其轨迹计算公式的推导,并通过应用实例展示这些公式的实用性。
二、数学模型星体运动的数学模型主要涉及到牛顿力学和万有引力定律。
根据牛顿第二定律和万有引力定律,可以推导出星体运动的加速度和运动轨迹。
1. 加速度的推导根据牛顿第二定律,星体所受的引力作用力为质量乘以加速度,即F = ma。
而根据万有引力定律,星体所受的引力为质量乘以该星体到质心距离的平方的倒数乘以引力常数G,即F = G(m1m2/r^2)。
将以上两个等式相等,我们可以得到星体的加速度计算公式为a = G(m1/r^2),其中m1为星体的质量,r为星体到质心的距离。
2. 运动轨迹的推导为了计算星体的运动轨迹,我们需要解决一个数学问题,即如何解微分方程。
根据牛顿第二定律和万有引力定律,可以得到星体的运动微分方程为m1(d^2r/dt^2) = -G(m1m2/r^2)。
通过对该微分方程进行适当的数学变换和求解,可以得到星体的运动轨迹方程。
最常见的轨迹方程是椭圆轨道方程,即r = a(1 - ecosθ),其中a是椭圆的半长轴,e是离心率,θ是与星体到近日点的连线成角度。
三、应用实例下面以地球围绕太阳运动的经典案例来说明星体运动轨迹计算公式的应用实例。
地球绕太阳运动是一个椭圆轨道,其中太阳位于椭圆的一个焦点内。
根据万有引力定律,地球质量与太阳质量的乘积与他们之间的距离的平方成反比,即G(m1m2/r^2) = m1(d^2r/dt^2)。
设地球质量为m1,太阳质量为m2,地球到太阳的距离为r,可以得到地球的运动微分方程为m1(d^2r/dt^2) = -G(m1m2/r^2)。
通过求解该微分方程并代入初始条件,我们可以得到地球的运动轨迹方程为r= a(1 - ecosθ)。
C语言计算星历位置GPS广播星历计算卫星位置和速度

C语言计算星历位置GPS广播星历计算卫星位置和速度GPS(全球定位系统)广播星历是一种用于计算卫星位置和速度的星历数据。
星历是一种描述卫星在天空中的位置和速度的数据,可以通过接收卫星广播的星历数据来计算卫星的当前位置和速度。
GPS广播星历数据通常由地面控制站维护和广播,卫星周期性地发送星历数据以更新接收器上的星历数据库。
接收器通过接收到的星历数据计算卫星的位置和速度,并使用这些信息来计算接收器的位置。
星历数据通常包括卫星的轨道参数和时间参数。
轨道参数包括卫星的半长轴、偏心率、轨道倾角、升交点经度、近地点幅角和平近点角速度。
时间参数包括卫星的时钟校正参数和广播时间。
接收器使用这些参数来计算卫星的位置和速度。
首先,接收器通过测量卫星信号的到达时间和广播时间来计算卫星信号的传播时间。
然后,接收器使用传播时间和卫星的时间参数来计算卫星的时间误差。
接下来,接收器使用卫星的轨道参数来计算卫星的真实位置和速度。
接收器使用卫星的时间误差来修正卫星的广播时间,并将其转换为GPS时间。
然后,接收器使用修正后的广播时间和卫星的轨道参数来计算卫星的位置和速度。
计算得到的卫星位置和速度可以用于定位接收器的位置。
接收器通过测量多个卫星的信号传播时间来计算卫星到接收器的距离。
然后,接收器使用卫星的位置和速度来计算接收器的位置。
GPS广播星历计算卫星位置和速度是GPS定位的核心技术之一、接收器通过接收到的星历数据来计算卫星的位置和速度,然后使用这些信息来计算接收器的位置。
这种计算过程是GPS定位的基础,可以用于估计接收器的位置和速度。
总结起来,GPS广播星历是一种用于计算卫星位置和速度的星历数据。
接收器通过接收到的星历数据和卫星信号的传播时间来计算卫星的位置和速度。
这些计算结果可以用于定位接收器的位置,并在导航和定位应用中发挥重要作用。
C语言计算星历位置GPS广播星历计算卫星位置和速度

C语言计算星历位置GPS广播星历计算卫星位置和速度C语言是一种通用的高级编程语言,可以用于计算星历位置以及计算GPS卫星位置和速度。
下面将详细介绍如何使用C语言来实现这些计算。
首先,我们需要了解星历和GPS广播星历的概念。
星历是一种描述天体位置的方法,它包含了每个天体的位置坐标、速度以及其他相关的信息。
星历常用于天文学研究和导航系统中。
GPS广播星历是由GPS卫星广播的星历信息,它包含了GPS卫星所处的位置、速度等信息。
通过接收并解码广播星历,我们可以计算出卫星的位置和速度。
在C语言中,我们可以使用数学库和一些公式来计算星历位置和GPS 卫星位置以及速度。
首先,我们需要导入数学库,可以使用`#include <math.h>`导入。
数学库提供了一些常用的数学函数,如计算平方根、计算三角函数等。
然后,我们需要根据星历或广播星历的信息,计算出卫星的位置和速度。
对于星历位置的计算,可以使用开普勒方程来逼近天体的真实位置。
开普勒方程的计算公式如下:E - e * sin(E) = M其中,E为偏近点角,e为偏心率,M为平近点角。
通过迭代计算,可以得到E的近似值。
然后,利用半长轴、偏心率和E的值,可以计算出卫星在轨道平面上的坐标。
对于GPS卫星位置和速度的计算,可以使用广播星历中的卫星钟差、偏心率修正项等信息。
具体的计算公式较为复杂,需要使用专门的算法进行计算。
在计算过程中,我们还需要考虑坐标系的转换,以确保最终计算得到的是相对于地球的地心坐标系中的位置和速度。
最后,我们可以将计算得到的卫星位置和速度输出,以便进行后续的处理或导航操作。
总结来说,使用C语言计算星历位置和GPS卫星位置和速度需要导入数学库并使用开普勒方程以及其他相关的计算公式来进行计算。
同时,还需要考虑坐标系的转换和其他相关的因素。
这只是一个简单的介绍,具体的实现可能需要更多的代码和算法。
星历计算

+--------------------------------+--------------------------------------------------------+----------------+
| BROADCAST ORBIT – 6 24| - SV accuracy (meters) | 3X,4D19.12 | | 25| - SV health (bits 17-22 w 3 sf 1) | | | 26| - TGD (seconds) | | | 27| - IODC Issue of Data, Clock | | +--------------------------------+-------------------------------------------------------+-----------------+ | BROADCAST ORBIT – 7 | - Transmission time of message **) | 3X,4D19.12 | | | (sec of GPS week, derived e.g. | | | | from Z-count in Hand Over Word (HOW) | | | | - Fit interval (hours) | | | | (see ICD-GPS-200, 20.3.4.4) | | | | Zero if not known | | | | - spare | | | | - spare | | +--------------------------------+-------------------------------------------------------+-----------------+
GPS广播星历计算卫星位置和速度
“GPS广播星历计算卫星位置和速度”及“GPS伪距定位”计算试验1.试验内容及上交成果1.1试验内容应用C语言按预定格式(函数、输入输出变量之名称、类型)编写“GPS广播星历计算卫星位置和速度”函数SatPos_Vel()、“GPS伪距定位”函数Positioning()。
将此两个函数组成文件F2.cpp,并包含于文件GPS_Positioning.cpp中。
编译、连接并运行文件GPS_Positioning.cpp,逐一时刻读取广播星历(Ephemeris.dat)、观测时间及伪距、卫星号(Observation.dat)信息,计算WGS84坐标系中观测时刻相应的卫星位置、速度以及载体位置,结果保存于文件Position.dat中。
1.2上交成果磁盘文件F2.cpp、Position.dat,并存于“学号作者中文姓名”目录中。
2.函数说明2.1星历文件读取函数void EFileReading(Efile)功能:读取星历文件,给星历数据结构体Ephemeris赋值。
输入变量:EFile字符串,文件名。
2.2观测数据读取函数int ObsReading(fp_Obs,Time,Rho,Mark)功能:从文件Observation.dat中读取某一时刻的伪距、卫星号。
读取成功函数值返回“1”,失败返回“-1”(读错,或至文件尾)。
输入变量:fp_Obs文件指针;输出变量:Time double,时间(秒);Rho double[12],伪距(米);Mark int[12],卫星号,“-1”表示此通道无卫星、无伪距。
2.3最小二乘估计函数int LeastSquareEstimation(Y,A,P,m,n,X)功能:最小二乘方法求解观测方程Y=AX+ε,其中观测值方差阵的逆阵为P(也称为权阵),得未知参数X。
成功返回“1”,失败返回“-1”(亏秩)。
输入变量:Y double[m],观测方程自由项(米);A double[m×n],系数阵(无量纲),按第1行第1、2……n元素,第2行……顺序存放;P double[m],权矩阵对角线元素,0或1(无量纲);m int,观测值个数;n int,未知参数个数;输出变量:X double[n],未知参数(米)。
低轨卫星广播星历模型与算法

分类号:P22810710-2015126034硕士学位论文低轨卫星广播星历模型与算法关梅倩导师姓名职称焦文海研究员申请学位级别工学硕士学科专业名称大地测量学与测量工程论文提交日期2018年4月23日论文答辩日期2018年6月5日学位授予单位长安大学LEO Satellite Broadcast Ephemeris Model and AlgorithmA Thesis Submitted for the Degree of MasterCandidate:Guan MeiqianSupervisor:Jiao WenhaiChang’an University, Xi’an, China摘要利用低轨卫星发播导航增强信息与导航信号,可提高导航系统定位精度与完好性,实现导航系统备份能力,同时较强的低轨卫星信号使得导航系统在强干扰、严遮蔽的复杂环境中提供可信、连续的位置信息服务成为可能。
文章围绕低轨卫星增强导航卫星这一主题,内容涉及低轨卫星星座设计及低轨卫星广播星历参数设计。
主要工作及成果如下:(1)选取80颗轨道高度为1000km的卫星组成低轨卫星星座,卫星星座构型为W80/8/1,卫星轨道倾角为55°,可实现除高纬地区90%的全球覆盖,南北纬80°范围内低轨卫星单星座PDOP值在1~10之间。
同时论证了该星座增强北斗全球系统(3GEO+3IGSO+24MEO)的情况。
仿真结果表明,低轨卫星星座的加入使得BDS星座最大PDOP值降低20.5%,最小PDOP值降低13.5%,平均PDOP值降低17%。
(2)将GPS 16/18参数应用于500km~1500km轨道低轨卫星,拟合残差在2cm~20cm 之间。
针对较大的拟合残差,对CHAMP卫星进行谱分析,结果表明,卫星轨道长半轴具有T/2短周期项,轨道偏心率与近地点幅角具有T/3和T周期短周期项。
在此基础上设计了22、24参数的低轨卫星广播星历。
星历计算
根据广播星历
时间变换
1 民用年历变换为儒略日 将时分秒化为时作单位UT • 设民用的年,月,日,时为Y,M,D,UT,则 • JD=INT[365.25y]+INT[30.6001(m+1)]+D + UT/24+1720981.5 • If M≤2, y=Y-1, m=M+12 • If M>2, y=Y, m=M
3.2、导航信息中的星历参数(3)
af0 卫星PRN号,年,月,日,时,分,秒,
C , e,C
ic
rc
, af1 af1 ,
a
is
aode , C rs , n , M 0
uc us
,
t oe , C
i0 , C
, 0,C , ,
iDot, cflgl2,weekno, pflgl2 svacc, svhlth, tgd, aodc ttm
3.1、广播星历
广播星历文件
广播星历文件格式
RINEX : The Receiver Independent Exchange Format GPS导航文件头格式
+-------------------------------------------------------------------------------------------------------------+ | TABLE A3 | | GPS NAVIGATION MESSAGE FILE - HEADER SECTION DESCRIPTION | +-------------------------------+-------------------------------------------------+--------------------------+ | HEADER LABEL | DESCRIPTION | FORMAT | | (Columns 61-80) | | | +-------------------------------+--------------------------------------------------+-------------------------+ |RINEX VERSION / TYPE| - Format version (2.10) | F9.2,11X, | | | - File type ('N' for Navigation data) | A1,19X | +-------------------------------+--------------------------------------------------+-------------------------+ |PGM / RUN BY / DATE | - Name of program creating current file | A20, | | | - Name of agency creating current file | A20, | | | - Date of file creation | A20 | +-------------------------------+--------------------------------------------------+--------------------------
加速度频谱密度计算
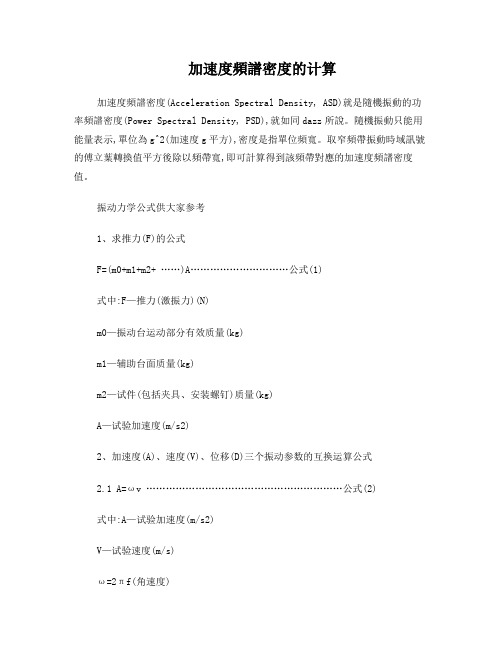
加速度頻譜密度的计算加速度頻譜密度(Acceleration Spectral Density, ASD)就是隨機振動的功率頻譜密度(Power Spectral Density, PSD),就如同dazz所說。
隨機振動只能用能量表示,單位為g^2(加速度g平方),密度是指單位頻寬。
取窄頻帶振動時域訊號的傅立葉轉換值平方後除以頻帶寬,即可計算得到該頻帶對應的加速度頻譜密度值。
振动力学公式供大家参考1、求推力(F)的公式F=(m0+m1+m2+ ……)A…………………………公式(1)式中:F—推力(激振力)(N)m0—振动台运动部分有效质量(kg)m1—辅助台面质量(kg)m2—试件(包括夹具、安装螺钉)质量(kg)A—试验加速度(m/s2)2、加速度(A)、速度(V)、位移(D)三个振动参数的互换运算公式2.1 A=ωv ……………………………………………………公式(2)式中:A—试验加速度(m/s2)V—试验速度(m/s)ω=2πf(角速度)其中f为试验频率(Hz)2.2 V=ωD×10-3 ………………………………………………公式(3) 式中:V和ω与“2.1”中同义D—位移(mm0-p)单峰值2.3 A=ω2D×10-3 ………………………………………………公式(4) 式中:A、D和ω与“2.1”,“2.2”中同义公式(4)亦可简化为:A=式中:A和D与“2.3”中同义,但A的单位为g1g=9.8m/s2所以:A≈ ,这时A的单位为m/s2定振级扫频试验平滑交越点频率的计算公式3.1 加速度与速度平滑交越点频率的计算公式fA-V= ………………………………………公式(5)式中:fA-V—加速度与速度平滑交越点频率(Hz)(A和V与前面同义)。
3.2 速度与位移平滑交越点频率的计算公式…………………………………公式(6)式中:—加速度与速度平滑交越点频率(Hz)(V和D与前面同义)。
广播星历参数物理意义分析与相关性研究_黄华

2 导航卫星轨道变化规律
导航卫星轨道高度较高,主要摄动源包括地球非 球形引力、日月引力和太阳辐射压。从卫星轨道运动 分析解[1]中可以看出,在以上主要摄动力作用下,导 航卫星轨道变化存在以下几个特征: (1 ) 地球非球形引力和日月引力属于保守力,太 阳辐射压在不考虑地影的情况下也属于保守力,因此 轨道没有能量耗散,轨道半场径无长期变化项; (2 ) 由于地球非球形引力田谐项共振 的影响, MEO、GEO 和 IGSO 卫星轨道都存在一阶( J 2 的量 级)长周期项,其中 GEO 和 IGSO 卫星的一阶长周期 项量级比 MEO 大; (3 ) (4 ) (5 ) (6 ) 偏心率不存在长期变化,在地球非球形引力 轨道倾角没有长期变化项,但在日月引力摄 升交点赤经、近点角距和平近点角存在一阶 所有轨道根数都存在短周期变化项。短周期
Abstract: The fitting precision of the broadcast ephemeris parameters is very important for the Satellite Navigation System. The ephemeris model of GPS fit for the MEO very well, but not so well for the GEO, and sometimes, the fitting values of some parameters are overrun the boundary of the user interface for GEO satellites. In order to find out the cause of the two problems, the physical meaning and correlation of the parameters are researched by theoretical analysis and numerical test in this paper. According to the research, it find out that the correlation of the parameters is related to the geometrical and perturbation characteristic of the orbit. The parameters which are related to orbital shape and its evolution have high correlation with each other, and the parameters which are related to orbital orientation and it’s also have high correlation with each other. The cause of the overrunning parameter n is the small inclination of GEO and the lunar perturbation. The small inclination can also make a ill-conditioned problem in normal equation. The coordinate rotation can solve all the problem caused by small inclination, the magnitude of the angle of rotation determine the amplitude of the parameter n . Keywords: broadcast ephemeris; correlation; physical meaning; lunar perturbation
卫星速度公式

卫星速度公式
摘要:
一、卫星速度公式简介
二、卫星速度公式推导
三、卫星速度公式应用
四、卫星速度公式与我国航天事业
正文:
卫星速度公式是描述卫星在地球引力作用下运动速度的公式,是航天科学中的一个重要公式。
卫星速度公式不仅可以用于计算卫星的轨道速度,还可以用于计算卫星的发射速度和返回速度。
卫星速度公式的推导基于牛顿万有引力定律和牛顿第二定律。
首先,根据牛顿万有引力定律,地球对卫星的引力提供了向心力,使卫星沿椭圆轨道运动。
然后,根据牛顿第二定律,向心力等于质量乘以向心加速度,即v/r = GM/r,其中v为卫星速度,r为卫星轨道半径,G为万有引力常数,M为地球质量。
卫星速度公式在卫星轨道计算、卫星发射和返回任务中有着广泛的应用。
首先,卫星轨道计算需要利用卫星速度公式,通过已知的地球质量和卫星轨道半径,计算出卫星的轨道速度。
其次,卫星发射和返回任务需要根据卫星速度公式,计算出卫星的发射速度和返回速度,以确保卫星能够顺利进入预定轨道或返回地球。
在我国航天事业中,卫星速度公式起着关键作用。
无论是通信卫星、导航
卫星还是遥感卫星,都需要利用卫星速度公式来计算其轨道参数。
此外,我国在卫星发射和返回任务中,也充分利用了卫星速度公式的计算结果,为我国航天事业的蓬勃发展做出了巨大贡献。
总之,卫星速度公式是航天科学中的一个重要公式,它不仅用于计算卫星的轨道速度,还广泛应用于卫星发射和返回任务。
导航系统的PVT解算汇总

由于 D和
v 误差在数据处理中难以模型化消除其影响,所以当暂不考虑
令 ct , bu cbut , t 是传输时间的钟面时,则有: 它们时,
c(t b (T I v)) T bu
(3.2)
三、定位方程
令修正后的伪距为:
'
c(t b (T I v))
2 、GLONASS系统导航数据格式及导航电文提取
每个字符串分数据位和时间标记两大部分。一个串长2s, 在最后的0.3s传输时间标记,时间标记由30个码元组成,每 个码长10ms。在前1.7s传输85个数据位。每个串中的位序号 按从右至左顺序排列。导航数据占用第9~84位、汉明码检验 码(KX)占用第1~8位,最后1位(第85位)是空闲位 (“0”)。其中这85个数据位要先变成相对码,再与明德码 模二相加,最后加上0.3s的时间标记,构成2s数据。
四、确定观测时刻
这里的观测时刻指的是当前接收到的导航电文的 发送时刻。 假设在用户端某时刻(由用户接收机的本地时间 确定)接收到来自n颗卫星(n>4)的导航电文,现 在要通过这n组导航电文确定出用户位置,则必须首 先知道这n颗卫星的位置。由于接收到的导航电文中 只提供了某个参考时刻时与卫星位置相关的参数, 所以,要计算当前时刻的卫星位置,就得由用户重 新确定出与参考时刻在同一参考时间系统下的该导 航电文的发送时刻,即这里提到的观测时刻,然后 计算出观测时刻的卫星位置。
导航系统的PVT解算
一、绪论
通常卫星导航接收机由射频接收,基带处理和PVT 解算三部分组成。PVT解算,顾名思义,即指用户 接收机的位置、速度和时间解算。 接下来将针对GPS和GLONASS系统来讲述它们各自 PVT解算中的用户位置计算过程,这也是本人对该 部分的学习和总结。 计算用户位置可以采用伪距定位法和载波相位定 位方法,后者精度较前者高,但前者比较普遍, 以下讲述的都是关于伪距定位的过程。
卫星多普勒计算
卫星多普勒计算卫星多普勒计算是一种利用卫星信号的多普勒效应来测量目标物体速度和距离的方法。
多普勒效应是指当波源和观察者相对运动时,波源发出的波频率相对于静止状态发生改变的现象。
在卫星多普勒计算中,我们利用卫星信号的频率变化来推算目标物体的运动状态。
卫星多普勒计算的基本原理是利用卫星信号的频率变化来确定目标物体的速度。
当卫星靠近目标物体时,信号频率会增加;当卫星远离目标物体时,信号频率会减小。
通过测量信号频率的变化,我们可以计算出目标物体的速度。
在卫星多普勒计算中,我们需要知道卫星信号的发射频率和接收频率,以及目标物体和卫星之间的相对速度。
通过测量信号频率的变化,我们可以利用多普勒公式计算出目标物体的速度。
多普勒公式可以表示为:v = (c * Δf) / f其中,v表示目标物体的速度,c表示光速,Δf表示信号频率的变化量,f表示发射或接收信号的频率。
卫星多普勒计算的精度受到多种因素的影响。
首先,信号的频率变化量越大,计算的精度就越高。
因此,为了提高计算的准确性,我们需要选择频率变化较大的卫星信号进行计算。
其次,信号的传播路径也会影响计算的精度。
如果信号经过大气层或其他障碍物的干扰,那么计算结果可能会受到影响。
此外,目标物体的运动状态也会对计算结果产生影响。
如果目标物体的速度变化较快,那么计算结果可能会不够准确。
卫星多普勒计算在许多领域都有广泛的应用。
在天文学中,卫星多普勒计算可以用来测量星体的速度和距离。
在地球科学中,卫星多普勒计算可以用来研究地壳运动和地球的形变。
在交通运输领域,卫星多普勒计算可以用来监测车辆的速度和位置。
在气象学中,卫星多普勒计算可以用来预测风暴的路径和强度。
卫星多普勒计算是一种利用卫星信号的多普勒效应来测量目标物体速度和距离的方法。
通过测量信号频率的变化,我们可以计算出目标物体的速度。
卫星多普勒计算在天文学、地球科学、交通运输和气象学等领域都有广泛的应用。
通过不断改进计算方法和提高测量精度,卫星多普勒计算将为我们提供更多有关目标物体运动状态的重要信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Extension of GPS Broadcast Ephemeris to Determine Satellite Velocity and AccelerationWen Zhang, University of Leeds, Leeds, UK Mounir Ghogho, University of Leeds, Leeds, UKLuis Enrique Aguado, Advanced Digital Institute, Bingley, UKBIOGRAPHYWen Zhang received a B.Sc. degree in Physics from Central China Normal University (CCNU), Wuhan, China in July 2003, and an M.S. degree in Optical Engineering from National University of Defense Technology (NUDT), Changsha, China, in December 2005. Now she is a Joint-training doctorate candidate at both the University of Leeds, UK and the National University of Defense Technology, under the supervision of Professor Mounir Ghogho, Dr. Luis Enrique Aguado and Professor Bolong Gao. Her research currently focuses on the GPS/INS Integration.Prof. Mounir Ghogho received the M.S. degree in 1993 and the PhD degree in 1997, both in Signal and Image Processing from the National Polytechnic Institute (INP), Toulouse, France. He was an EPSRC Research Fellow with the University of Strathclyde, Glasgow, from September 1997 to November 2001. Since December 2001, he has been a faculty member with the school of Electronic and Electrical Engineering at the University of Leeds, where he is currently a Professor. His research interests are in signal processing for communications and networking. He is currently an Associate Editor of the IEEE TRANSACTIONS ON SIGNAL PROCESSING and a member of the IEEE SPCOM and SPTM Technical Committees.Dr. Luis Enrique Aguado has got over 15 years of research and project management experience in industrial and academic environments in the areas of satellite navigation and wireless communications. He is Sector Manager for the DSP Research Group at the Advanced Digital Institute in Bingley, UK. Before that he was Senior Research Fellow at the University of Leeds for 10 years, being Acting Director of the CAA Institute of Satellite Navigation from 2006 to 2007. Dr. Aguado has a PhD in Electrical Engineering from University of Manchester (UK) and a B.S., also in Electrical Engineering, from University of Mondragon (Spain).ABSTRACTThis paper presents an expansion of the algorithm provided in the GPS ICD to include the precise real-time computation in ECEF coordinate of the velocity and acceleration components of the satellite orbit besides the position components using the broadcast ephemeris. Precise satellite velocity andacceleration data are needed for applications using precise receiver Doppler measurements, such as GPS/INS integration. The expansion proposed in this paper improves the observed performance of an alternative derivation recently published. Ephemeris records are then expanded using this derivation and the resulting velocities and accelerations compared with the National Geodetic Survey (NGS) SP3 precise velocities and accelerations. This resulted in agreement in the order of one millimetre per second and one millimetre per second squared, respectively. It should be noted that using Kepler’s second law to calculate the first derivative of the true anomaly is not appropriate and it will decrease the agreement of the velocities to the order of one decimetre per second when compared with NGS SP3 precisevelocities. KEY WORDSGPS; Broadcast Ephemeris; Satellite Velocity; Satellite Acceleration.1. IntroductionGPS is used for applications where precise real-time satellite velocities and accelerations are needed aswell as satellite positions, such as GPS/INS integration. The satellite motion needs to be subtracted from the received signal dynamics to measure those of receiver antenna. Satellite’s ECEF positions can be derived from GPS Broadcast Ephemeris data by using the method described in the GPS interface control document ICD-GPS-200D [1]. However, it did not include algorithms for satellite ECEF velocity and acceleration determination. One method to derive the satellite velocity and acceleration is to use the rotation matrix method [2]. However, it should be noted that using Kepler’s second law to calculate the first derivative of the true anomaly is not appropriate as explained below and it will decrease the accuracy of velocity estimation. Another way to derive the satellite velocity and acceleration is to differentiate the satellite position with respect to time to calculate the velocity, and differentiate it a second time for the acceleration. This differential method can be implemented using the first order central differencing approximation of Taylor series [2], where one satellite velocity determination needs 3 successive satellite positions and one satellite acceleration determination needs 5 successive satellite’s positions.This paper shows how to calculate satellite velocities and accelerations using only the Keplerian elements and correction terms of the broadcast ephemeris, which is considered as an improvementof the rotation matrix method mentioned above. In the proposed method, just one set of Keplerian elements and correction terms of a specific epoch is required to compute both the satellite velocity and acceleration. The processing can be carried out using either post-processed/predicted ephemeris downloaded from the International GNSS Service (IGS), or real-time processing using GPS Broadcast Ephemeris parameters in the navigation data decoded by the receiver.In this paper, GPS ephemeris data definitions and computation of a satellite’s ECEF position vector are first introduced. Then, a set of equations to calculate the satellite velocity and acceleration is derived using Keplerian elements and correction terms included in the broadcast ephemeris. All the parameters and equations needed to compute a satellite position, velocity and acceleration are explicitly listed in tables for ease of use. An example is presented comparing the results obtained using the equations described with the results of precise NGS SP3 data. A comparison between the results obtained using Kepler’s second law to calculate the first derivative of true anomaly with NGS SP3 precise ephemeris is also carried out. Finally, a summary and conclusions are provided. 2.GPS Ephemeris Data Definitions andComputation of a Satellite’s ECEF PositionVectorLet us first list the symbols needed to compute the broadcast orbits. These are listed in Table 1 below using the notation adopted in [3].ucC Amplitude of cosine correction to argument of latitudeusC Amplitude of sine correction to argument of latitudercC Amplitude of cosine correction to orbital radiusrsC Amplitude of sine correction to orbital radiusicC Amplitude of cosine correction to inclination angleisC Amplitude of sine correction to inclination angleTable 1 GPS ephemeris data definitionsTable 2 provides the algorithm by which a GPS receiver computes the position vector of a satellite (sx,sy,sz) in the ECEF coordinate system from the orbital elements in Table 1 [3].(14) e e k e k t t 00)(Ω−Ω−Ω+Ω=Ω&&& Corrected longitude of node, eΩ&is the Earth rotation rate(15) k k p u r x cos = In-plane x position (16) k k p u r y sin =In-plane y position (17) k k p k p s i y x x Ω−Ω=sin cos cos ECEF x-coordinate (18) k k p k p s i y x y Ω+Ω=cos cos sin ECEF y-coordinate (19)k p s i y z sin =ECEF z-coordinateTable 2 Computation of a satellite’s ECEF Position VectorAs indicated in Equations (15) to (19) in Table 2, the in-plane (orbital plane) satellite position vectoris []Tp p p y x r 0=r and the satellite ECEF position vector is []Ts sss z y x r =r. s r r can beexpressed in terms of p r ras pp k x k z s r R r i R R r rr r =−Ω−=)()(, where the rotationmatrices are⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡ΩΩΩ−Ω=Ω−100cos sin 0sin cos )(kkk kk z R ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−=−k kk kk x i i i i i R cos sin 0sin cos 0001)(, and ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡Ω−ΩΩΩΩ−Ω=−Ω−=k kk k kk k k k kk k k x k z i i i i i i i R R R cos sin 0sin cos cos cos sin sin sin cos sin cos )()( Thus, the ECEF coordinates Equations (17), (18)and (19) in Table 2 can be readily computed using the above matrix. Besides, the Keplerian orbital elements which define the orientation of the orbit are illustrated in Figure 1.Figure 1 The Keplerian Orbital Elements Defining the Orientation of the Orbit3. Computation of the Satellite ECEF VelocityThe first derivative of the rotation matrix R with respect to time, R&, is given by⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−Ω−ΩΩΩ−ΩΩ−ΩΩΩ+ΩΩΩ+ΩΩ−ΩΩ−=k k k k k k k k k k k k kk k k k k k k kk k k k k kk k k k i i i ii i i i i i i i i i i i R sin cos 0cos cos sin sin sin cos cos sin cos cos sin sin cos sin sin cos cos sin &&&&&&&&&&&&&Differentiating Equations (4) and (5) with respect to time and substituting the result of the first derivationfor kM &in the second derivation, we obtain )cos 1(k k E e n E −=& (20) Differentiating with respect to time the expression for )sin(k ν in Equation (6) and then using the expression for )cos(k ν in Equation (6) yields)cos 1(12k k k E e e E −−=&&ν (21) In reference [2], the author presented a different equation for calculating k ν& using Kepler’s second law (the radius vector sweeps out the equal areas in equal time). In this case the derivative of the true anomaly k ν&is given by: 2221k k r n e a ⋅−=ν& (21’) Using Equation (21’) instead of (21) will result in asatellite ECEF velocity error when the time from ephemeris epoch k t is not equal to zero. The largerthe value of k t , the larger the satellite ECEF velocity error. The main reason for this is that the semi-major axis a could not be corrected and compensated for when used at ephemeris epochs k t beyond the reference epoch e t 0 in the algorithm. Meanwhile, the effect on the satellite ECEF acceleration is negligible. This is illustrated with anexample in Table 7 of Section 5. Assuming the argument of the perigee ω is time-invariant, differentiating Equation (7) with respectto time shows that k kνφ&&≈. Further, substituting the right hand side of Equation (10) for k i δ in equation(13) and taking the first-order derivative of the resulting equation, we obtain the first-order derivative of the corrected inclination as followskk ic k is kk ic k is k v C C i C C i i &&&&&))2sin()2cos((2))2sin()2cos((2φφφφφ−+≈−+= (22)where the correction terms can be readily calculatedfrom the expression for k ν& in Equation (21). Substituting the right hand side of Equation (8) for k δφ in Equation (11) and taking the first-order derivative of the resulting equation, we obtain thefirst-order derivative of the corrected latitude, wehave thatkk uc k us k kk uc k us k k v C C v C C u &&&&&))2sin()2cos((2))2sin()2cos((2φφφφφφ−+≈−+= (23)Substituting the right hand side of Equation (9) for k r δ in Equation (12) and taking the first-orderderivative of the resulting equation, we obtain the first-order derivative of the corrected radius, wehave thatk krc k rs k k kk rc k rs k k k v C C E E ae C C E E ae r &&&&&))2sin()2cos((2sin ))2sin()2cos((2sin φφφφφ−+≈−+= (24) Differentiating Equation (14) for the correctedlongitude of node with respect to time, we have that ek Ω−Ω=Ω&&& (25) The derivatives of the in-plane x and y positions in equations (15) and (16) with respect to time give[][]Tkk k k k k k k k k T pp p u u r u r u u r u r y x r 0cos sin sin cos 0&&&&&&&r +−==that isk k k k k p u u r u r x sin cos &&&−= (26) k k k k k p u u r u r y cos sin &&&+= (27) Differentiating the rotated vector p s r R r r r = with respect to time, we have []pp T s s sr R r R yx r &r r &&&&r +==0 that isk k p k p k k k kk k p kk p s i y xi i i y x x cos sin cos )sin sin cos cos (sin Ω−Ω+Ω−ΩΩ−ΩΩ−=&&&&&& (28) k k p k p k k k kk k p kk p s i y xi i i y x y cos cos sin )sin cos cos sin (cos Ω+Ω+Ω+ΩΩ−ΩΩ=&&&&&& (29) k p k k p s i y i i y zsin cos &&&+= (30)4. Computation of Satellite’s ECEFAccelerationTaking the double-differenced terms k i && and k Ω&&terms as zero, the second derivative of the rotation matrix R is⎥⎥⎥⎦⎤−ΩΩ+Ω+ΩΩΩ+Ω+Ω−⎢⎢⎢⎣⎡−ΩΩ+Ω+Ω−ΩΩ−ΩΩ+Ω+ΩΩΩ−=k k k k k k k k k k kk k k k k k k k k kk k k k k k k k k k k k k k k k k kk i i i i i i i i i i i ii i i i i i i i R cos cos sin 2sin cos )(cos cos 2sin sin )(sin 0sin sin 2cos cos )(sin sin cos 2cos sin )(cos 222222222222&&&&&&&&&&&&&&&&&&&&&&In Classical Mechanics, considering the two-body problem of Earth and the satellite, the satellite’s acceleration in the nominal orbit plane is[]33kp pp Tp p p r r r r yxr r rr &&&&&&r ⋅−=⋅−==μμwhere GM =μ, with G being the universal gravitational constant and M being the Earthmass, respectively. Therefore, the in frame acceleration components can be expressed as 3k p p r x x⋅−=μ&& (31) 3k p p r y y⋅−=μ&& (32) Differentiating the rotated velocityvector pp s r R r R r &r r &&r += with respect to time, we have[]pp p T s s s s r R r R r R z y x r &&r &r &r &&&&&&&&&&r ++==2 That isk k p k p k k k kk k p kkpkkkk k k k k p k k p s i yx i i i y x i i i i y x x cos sin cos )sin sin cos cos (2sin 2)sin cos 2cos sin )((cos 222Ω−Ω+Ω−ΩΩ−ΩΩ−ΩΩ+Ω+Ω+ΩΩ−=&&&&&&&&&&&&&&&& (33)k k p k p k k k kk k p k k p k k k k k k k k p k k p s i yx i i i y x i i i i y x y cos cos sin )sin cos cos sin (2cos 2)sin sin 2cos cos )((sin 222Ω+Ω+Ω+ΩΩ−ΩΩ+ΩΩ−Ω+Ω−ΩΩ−=&&&&&&&&&&&&&&&& (34) k p k k p k k p s i yi i y i i y z sin cos 2sin 2&&&&&&&++−= (35) Table 3 summarizes the algorithm to compute the velocity vector (s s s z y x&&&,,) and acceleration vector (s s s zy x &&&&&&,,) of a GPS satellite in the ECEF coordinate system from the orbital elements inTable 1.5.Performance ResultsThe above satellite position, velocity and acceleration determination algorithm, described from equations (1) to (35), has been implemented using Matlab code. Table 4 is a set of input broadcast ephemeris data corresponding to the simulated time as employed in the Matlab program.The data in table 5 has been downloaded from the NGS as given in [2]. It lists both velocities and accelerations for PRN 07 on 20th August 2002 from time 22:19:01 to 22:19:10. The velocities are from the SP3 precise ephemeris and the accelerations are obtained using the first-order central difference of a Taylor series approximation of the NGS SP3 velocities. We can use Table 5 as a precise reference of velocities and accelerations of these time specifications.Time)/(s m V x )/(s m V y)/(s m V z)/(2s m A x )/(2s m A y )/(2s m A z 22:19:01 329.9513 -888.5965 -2997.0555 0.2055 -0.3022 0.1413 22:19:02 330.1568 -888.8987 -2996.9141 0.2054 -0.3022 0.1414 22:19:03 330.3622 -889.2009 -2996.7727 0.2054 -0.3022 0.1414 22:19:04 330.5676 -889.5032 -2996.6312 0.2053 -0.3023 0.1415 22:19:05 330.7729 -889.8055 -2996.4897 0.2053 -0.3023 0.1415 22:19:06 330.9782 -890.1078 -2996.3481 0.2052 -0.3023 0.1416 22:19:07 331.1834 -890.4101 -2996.2064 0.2052 -0.3023 0.1417 22:19:08 331.3886 -890.7124 -2996.0646 0.2051 -0.3023 0.1418 22:19:09 331.5937 -890.0147 -2995.9228 0.2051 -0.3024 0.1418 22:19:10 331.7988 -891.3171 -2995.7809 0.2050-0.30240.1419Table 5 Satellite Velocity and acceleration from NGS SP3 precise position and velocityTable 6 are satellite velocities and accelerations calculated using the derived equations (28), (29), (30), (33), (34) and (35) in Table 3. The velocities and accelerations in Table 6 have been compared with the precise reference in Table 5 and the agreements are better than 1 mm/s and 1mm/s 2.Time)/(s m V x )/(s m V y )/(s m V z)/(2s m A x )/(2s m A y)/(2s m A z 22:19:01 329.9516 -888.5963 -2997.0556 0.2054 -0.3022 0.1413 22:19:02 330.1570 -888.8985 -2996.9143 0.2054 -0.3022 0.1413 22:19:03 330.3624 -889.2007 -2996.7728 0.2053 -0.3022 0.1414 22:19:04 330.5678 -889.5030 -2996.6314 0.2053 -0.3022 0.1415 22:19:05 330.7731 -889.8052 -2996.4898 0.2052 -0.3022 0.1415 22:19:06 330.9784 -890.1075 -2996.3482 0.2052 -0.3023 0.1416 22:19:07 331.1836 -890.4098 -2996.2065 0.2051 -0.3023 0.1417 22:19:08 331.3888 -890.7122 -2996.0648 0.2051 -0.3023 0.1417 22:19:09 331.5939 -891.0145 -2995.9229 0.2050 -0.3023 0.1418 22:19:10 331.7990 -891.3169 -2995.7811 0.2050-0.3023 0.1419Table 6 Satellite velocities and accelerations calculated using equations in Table 3Table 7 shows the satellite velocity andacceleration calculated using the formulas in Table 3, but using equation (21’) instead of (21) when calculating k ν&. The velocities and accelerations in Table 7 have been compared with the precise reference in Table 5 and the agreement of the velocities decreased to better than 1 dm/s, while the agreement of the accelerations are still better than 1mm/s 2. This decreased accuracy of the velocities is because the semi-major axis a change over the time epochs k t could not becorrected and compensated in the algorithm.Meanwhile, the impact of the change of the semi-major axis a on the acceleration calculation is negligible.Time)/(s m V x)/(s m V y )/(s m V z )/(2s m A x )/(2s m A y)/(2s m A z 22:19:01 329.9635 -888.5622 -2997.0121 0.2054 -0.3022 0.1413 22:19:02 330.1689 -888.8645 -2996.8708 0.2054 -0.3022 0.1413 22:19:03 330.3744 -889.1667 -2996.7294 0.2053 -0.3022 0.1414 22:19:04 330.5797 -889.4690 -2996.5879 0.2053 -0.3022 0.1415 22:19:05 330.7850 -889.7713 -2996.4464 0.2052 -0.3022 0.1415 22:19:06 330.9903 -890.0735 -2996.3048 0.2052 -0.3023 0.1416 22:19:07 331.1955 -890.3759 -2996.1631 0.2051 -0.3023 0.1417 22:19:08 331.4007 -890.6782 -2996.0214 0.2051 -0.3023 0.1417 22:19:09 331.6058 -890.9805 -2995.8796 0.2050 -0.3023 0.1418 22:19:10 331.8108 -891.2829 -2995.7377 0.2050-0.30230.1419Table 7 Satellite velocities and accelerations ignoring the change on the semi-major axis6.ConclusionsIn summary, this paper has presented an expansion of the ICD-GPS-200D algorithm to include the computation of the velocity components and acceleration components of the satellite additionally to the position components in the ECEF coordinate system using the broadcast ephemeris. The equations to calculate velocity and acceleration are summarized in Table 3. Computed acceleration and velocity for an example data set have been compared with National Geodetic Survey SP3 precise velocities and accelerations resulting in an agreement to one millimetre per second and one millimetre per second squared, respectively. With such a high accuracy satellite velocities and accelerations in real time, precise, Doppler based, GPS velocity and acceleration measurements can be obtained with simple single frequency stand-alone set-ups that may be used in different applications. We have proposed here a new algorithm for the derivation of the satellite velocity which was shown to provide millimetric performance, therefore outperforming existing methods.7.AcknowledgementsThe first author would like to thank Chinese Scholarship Council which sponsors her studies in the UK.8.References1.ARINC Engineering Services LLC., IGS-GPS-200, Revision D,Navstar GPS SpaceSegment/Navigation User Interfaces, 7thDecember 20042.Zhang, J. et al, GPS Satellite Velocity andAcceleration Determination using theBroadcast Ephemeris, Journal of Navigation(2006), 59:2:293-305.3.Kaplan, E. D. (Ed.), Understanding GPS:Principles and Application, 1996, ArtechHouse Publishers。