第二章 智能控制的知识工程基础讲解
《智能控制》课程笔记
《智能控制》课程笔记第一章绪论1.1 智能控制的产生和发展智能控制是随着科技的发展而逐渐兴起的一个领域,它是自动控制理论的重要组成部分。
智能控制的概念最早可以追溯到20世纪60年代,当时人工智能、模式识别、系统辨识等领域的研究成果为智能控制的发展奠定了基础。
进入20世纪70年代,随着计算机技术的飞速发展,智能控制得到了迅速推广和应用。
20世纪80年代以来,智能控制已成为自动控制领域的研究热点,并在许多领域取得了显著成果。
智能控制的发展受到了许多领域的推动,如计算机科学、人工智能、自动控制、电子学、生物学等。
这些领域的研究成果为智能控制的理论和方法提供了丰富的素材。
目前,智能控制已在工业生产、交通运输、生物医学、能源等领域得到了广泛应用。
1.2 智能控制的定义和特点智能控制是指采用人工智能、模式识别、系统辨识等技术,对复杂系统进行建模、分析、设计和控制的方法。
智能控制的特点主要包括:1. 自适应性:智能控制系统能够根据环境和任务的变化,自动调整控制策略,实现最优控制。
2. 鲁棒性:智能控制系统具有较强的鲁棒性,能够在一定范围内适应不确定性和外部干扰。
3. 学习能力:智能控制系统能够通过学习,不断优化控制策略,提高控制性能。
4. 解释能力:智能控制系统能够对控制结果进行解释,为用户提供决策支持。
5. 实时性:智能控制系统能够在实时环境下运行,满足实时性要求。
1.3 智能控制的研究内容智能控制的研究内容主要包括以下几个方面:1. 智能控制理论:研究智能控制的基本原理和方法,包括人工智能、模式识别、系统辨识等。
2. 智能控制器设计:研究如何设计智能控制器,实现复杂系统的稳定、高效运行。
3. 智能控制应用:研究智能控制在各个领域的应用,如工业生产、交通运输、生物医学等。
4. 智能控制仿真与实验:利用计算机仿真和实验手段,验证智能控制理论和方法的有效性。
5. 智能控制与其他学科的交叉研究:探讨智能控制与生物学、心理学、经济学等学科的交叉研究,为智能控制的发展提供新的思路和方法。
大学课件-智能控制基础(完整)

Curiosity 蛟龙号
智能控制:是应用人工智能的理论 与技术和运筹学的优化方法,并将 其同控制理论方法与技术相结合, 在未知环境下,仿效人的智能,实 现对系统的控制。
Artificial Intelligence
Operation Research
IC=AI∩AC∩OR 一个知识处理系统,具有记忆、 一种定量优化方法,如线性规划、
1.2.3 智能控制系统的特征模型
➢ 特征模型:是对系统动态特性的 一种定性与定量相结合的描述。是 针对问题求解和控制指标的不同要 求,对系统动态信息空间的一种划 分。
智能控制系统的特征模型
fi
{e e 0
e e
e
1 e
2}
上述特征表明,系统正处于受扰动的作用, 以较大的速度偏离目标值的状态。其中参 数为阈值。
组织级
➢ 执行级进行高精度控制 精
智
度 协调级
能
执行级
专家控制系统
➢分为专家控制器和专家控制系统; ➢应用于故障诊断、过程控制等; ➢工程控制论与专家系统的结合。
模糊控制系统
➢ 实现基于自然语言描述规则的控制;
➢ 可替代、改进非线性控制器;
➢ 由知识库、模糊化、模糊推理和反模
糊化组成。
知识库
输入
形成期
发展期
1991-至今
• 萌芽期(1970以前)
• 控制系统具有初步的智能和一定的适应性, 比如模型参考自适应控制。
• 1965年普渡大学的傅京孙(Fu, K. S.)教 授把人工智能引入到控制技术中,提出将 人工智能的启发式推理规则用于学习控制 系统的思想和方法。
• 1966年Mendel将人工智能用于飞船控制 系统的设计并首先提出“人工智能控制” 的概念。
2.2 一阶谓词法知识表示与问题求解

前面具有符号﹁的公式叫做否定。
一个复合公式的否定也是合适公式。
自动化系仪自教研室
19
2.2.1一阶谓词知识表示法 连词 (联接词)
① ② ③ ④ ⑤ ﹁:“否定”联结词,当命题P为真时,则﹁P为假,反之为真 ∧:“合取”联结词,它表示两个命题之间具有“与”关系。 ∨:“析取”联结词,它表示两个命题存在“或”的关系。 →:“蕴含”联接词、“单条件”,P→Q表示“如果P,则Q”。 其中P为前件,Q为后件。
自动化系仪自教研室
16
2.2.1一阶谓词知识表示法 析取联接词∨ 析取:连词∨用来表示“或”关系。用连词∨把几个公式连 接起来所构成的公式叫做析取, 而次析取式的每一组成部分 叫做析取项
例如,句子“李明 打篮球或踢足球”可表示为:
PLAYS(LIMING,BASKETBALL)∨PLAYS(LIMING, FOOTBALL)
自动化系仪自教研室 26
2.2.1一阶谓词知识表示法
【例2.2.1.2】 用一阶谓词法表示下列语句
(1)自然数都是大于零的整数 (x)(N(x)→GZ(x)∧I(x)) (2)所有整数不是偶数就是奇数 (x)(I(x)→E(x)∨O(x)) (3)偶数除以2 是整数 (x)(E(x)→I(S(x)))
自动化系仪自教研室 7
2.2 知识的表示
如何选取合适的知识表示法? 需要考虑的因素 6. 能否模块化 7. 知识和元知识能否用统一的形式表示 8. 能否加入启发信息 9. 过程性表示还是说明性表示 10. 表示方法是否自然
自动化系仪自教研室 8
2.2 知识的表示
表示观
表示观即对于“什么是表示”这一基本问 题的不同理解和采用的方法论。 认识论表示观
《智能控制基础了解》课件

能化的控制方式,智能化程度高于传统 的控制方法。
智能控制可以分为模糊控制、神经网络
控制、遗传算法控制等多种形式,根据
具体应用场景选择合适的方法。
3
模糊控制
模糊控制利用模糊逻辑推理来处理不确
定性和模糊性,适用于复杂且非线性的
神经网络控制
4
控制系统。
神经网络控制利用神经网络模型来建立
动态系统的映射关系,适用于数据驱动
基于遗传算法控制的电力 系统
遗传算法控制可以优化电力系统 的发电和输电策略,实现能源的 高效利用和环境保护。
未来展望
1 智能控制发展趋势
智能控制将越来越融入各个领域,实现更智能、更自动化的控制系统。
2 智能控制在智能家居、智能制造等领域的应用
智能控制可以提升家居和制造业的智能化水平,提供更便捷和高效的生活和工作环境。
控制系统基础
控制系统的组成要素
控制系统由信号接收、处理、执行三个基本组 成要素构成,实现对被控物体的控制。
PID控制器
PID控制器是最常用的控制器之一,包括比例、 积分和微分三个部分,用于提高系统的稳定性 和响应速度。
智能控制基础
1
智能控制的概念
智能控制是指利用人工智能技术实现智
智能控制的分类
2
智能控制基础了解
本课程将介绍智能控制的基础知识,包括概述、控制系统基础、智能控制基 础、智能控制的应用举例、未来展望和总结。
概述
1 什么是智能控制?
智能控制是指利用现代科技,通过感知、推 理和决策等能力来实现高效、自动化的控制 系统。
2 智能控制的应用领域
智能控制广泛应用于工业控制、机器人、自 动化设备、智能交通等领域,提高生产效率 和生活质量。
智能控制基础共42页文档

智能控制的类型
智能控制系统一般包括 分级递阶控制系统 专家控制系统 神经控制系统 模糊控制系统 遗传算法系统 集成或者(复合)混合控制:几种方法和机制
往往结合在一起,用于一个实际的智能控制系 统或装置,从而建立起混合或集成的智能控制 系统。
分级递阶控制系统
分级递阶智能控制是在自适应控制和 自组织控制基础上,由美国普渡大学 Saridis提出的智能控制理论。分级递阶 智 能 控 制 ( Hierarchical Intelligent Control) 主 要 由 三 个 控 制 级 组 成 , 按 智 能控制的高低分为组织级、协调级、执 行级,并且这三级遵循“伴随智能递降 精度递增”原则,其功能结构如下图所 示。
ERP( Enterprise Resource Planning ),企业资源计划
MES (manufacturing execution system),制造执行系统
SCADA (Supervisory Control and Data Acquisition)系统,全名为数据采集与监视控制系统 PLC( Programmable Logic Controller ),可编程控制器 RTU( Remote Terminal Unit )远程终端设备
应用传统控制理论进行控制必须提出并 遵循一些比较苛刻的线性化假设,而这 些假设在应用中往往与实际情况不相吻 合。
智能控制的研究对象
对于某些复杂的和饱含不确定性的控制 过程,根本无法用传统数学模型来表示, 即无法解决建模问题。
为了提高控制性能,传统控制系统可能 变得很复杂,从而增加了设备的投资, 减低了系统的可靠性。
智能控制的基本概念
定义四: 智能控制实际只是研究与模 拟人类智能活动及其控制与信息传 递过程的规律,研制具有仿人智能 的工程控制与信息处理系统的一个 新兴分支学科。
智能控制技术(第2章-专家系统与专家控制系统)

(3)成熟期(1972-1977年): 在此期间斯坦福大学研究开发了最著名 的专家系统-血液感染病诊断专家系统 MYCIN,标志专家系统从理论走向应用。 另一个著名的专家系统-语音识别专家系统 HEARSAY的出现,标志着专家系统的理 论走向成熟。
(4)发展期(1978-现在) 在此期间,专家系统走向应用领域, 专家系统的数量增加,仅1987年研制成 功的专家系统就有1000种。 专家系统可以解决的问题一般包括解 释、预测、设计、规划、监视、修理、 指导和控制等。目前,专家系统已经广 泛地应用于医疗诊断、语音识别、图象 处理、金融决策、地质勘探、石油化工、 教学、军事、计算机设计等领域。
等价问题(更易)
4、“与或图”表示法
与或图构成规则 •与或图中的每个节点代表一个要解决的 单一问题或问题集合,图中的起始节点对 应总问题。 •对应于本原问题的节点为叶节点,它没 有后裔。 •对于把算符(与操作/或操作)应用于 问题 A的每种可能情况,都把问题变换为 一个子问题集合;有向弧线自A指向后继 节点,表示所求得的子问题集合。
(2)推理机的设计
① 选择推理方式;
② 选择推理算法:选择各种搜索算法,如 深度优先搜索、广度优先搜索、启发式优 先搜索等。
(3)人─机接口的设计
① 设计“用户─专家系统接口”:用于咨 询理解和结论解释; ② 设计“专家─专家系统接口”:用于知 识库扩充及系统维护。
2.3 专家控制系统的设计方法
2. 2、专家系统的基本结构与实现
专家系统主要由知识库和推理机构 成,专家系统的结构如图2-4所示。
用户
领域专家
知识工程师
人机接口
解释机构
知识获取机构 专 家 系 统 核 心
数据库
智能控制基础了解
智能控制基础了解智能控制基础了解1.介绍智能控制的概念智能控制是指利用先进的技术和算法,对系统进行实时的监测和调整,以提高系统的性能和效率。
智能控制可以应用于各种领域,如工业控制、智能家居、自动驾驶等。
2.智能控制的基本原理(1) 传感器和执行器传感器用于感知系统的状态和环境信息,执行器用于执行控制命令。
(2) 控制算法控制算法根据传感器信息进行决策,并相应的控制命令。
(3) 反馈机制反馈机制用于对系统的输出进行实时监测和反馈,以调整控制算法的参数。
(4) 优化算法优化算法用于优化控制算法的参数,以实现最优的控制效果。
3.智能控制的分类(1) 闭环控制和开环控制闭环控制通过反馈机制实时调整控制命令,以减小系统的误差,而开环控制没有反馈机制。
(2) 模糊控制模糊控制是一种基于模糊逻辑的控制方法,适用于复杂、非线性的系统。
(3) 神经网络控制神经网络控制利用神经网络模型进行系统建模和控制决策,具有自学习和适应能力。
(4) 遗传算法控制遗传算法控制通过模拟自然界的进化过程,对控制算法的参数进行优化。
4.智能控制的应用领域(1) 工业控制智能控制在工业领域广泛应用,如生产线控制、控制等,提高生产效率和质量。
(2) 智能家居智能控制在智能家居领域可以实现灯光、空调、门窗等设备的自动控制和优化管理。
(3) 自动驾驶智能控制在自动驾驶领域可以实现车辆的自主导航和行为决策,提高驾驶安全性和舒适性。
本文档涉及附件:________附件1 ●智能控制系统示意图本文所涉及的法律名词及注释:________1.智能控制:________指利用先进的技术和算法,对系统进行实时的监测和调整的过程。
2.闭环控制:________通过反馈机制实时调整控制命令,以减小系统的误差。
3.开环控制:________没有反馈机制的控制方式。
4.模糊控制:________一种基于模糊逻辑的控制方法,适用于复杂、非线性的系统。
5.神经网络控制:________利用神经网络模型进行系统建模和控制决策的控制方式。
智能控制技术(亲自整理的知识点)
智能控制(1)智能控制与传统控制的区别答:传统控制方法包括经典控制和现代控制,是基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制问题,难以解决对复杂系统的控制。
智能控制能解决被控对象的复杂性、不确定性、高度的非线性,是传统控制发展的高级阶段。
(2)智能控制的概念答:智能控制是人工智能、自动控制、运筹学的交叉。
(3) 1986年美国的PDP 研究小组提出了BP 网络,实现了有导师指导下的网络学习,为神经网络的应用开辟了广阔的发展前景。
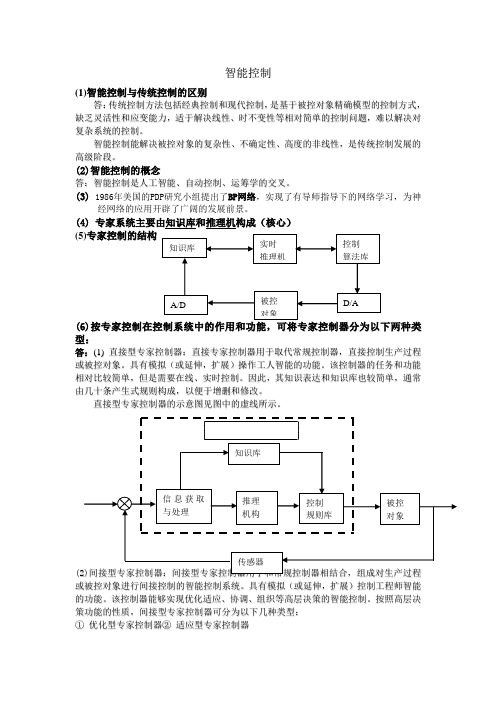
(4) 专家系统主要由知识库和推理机构成(核心)(5)专家控制的结构(6)按专家控制在控制系统中的作用和功能,可将专家控制器分为以下两种类型:答:(1) 直接型专家控制器:直接专家控制器用于取代常规控制器,直接控制生产过程或被控对象。
具有模拟(或延伸,扩展)操作工人智能的功能。
该控制器的任务和功能相对比较简单,但是需要在线、实时控制。
因此,其知识表达和知识库也较简单,通常由几十条产生式规则构成,以便于增删和修改。
直接型专家控制器的示意图见图中的虚线所示。
(或被控对象进行间接控制的智能控制系统。
具有模拟(或延伸,扩展)控制工程师智能的功能。
该控制器能够实现优化适应、协调、组织等高层决策的智能控制。
按照高层决策功能的性质,间接型专家控制器可分为以下几种类型: ① 优化型专家控制器② 适应型专家控制器③ 协调型专家控制器④ 组织型专家控制器例3.4 设 求A ∪B ,A ∩B 则(7) 在模糊控制中应用较多的隶属函数有以下6种隶属函数。
(1)高斯型隶属函数高斯型隶属函数由两个参数σ和c 确定:222)(),,(σσc x ec x f --=其中参数b 通常为正,参数c 用于确定曲线的中心。
M a t l a b 表示为 c]),σ[gaussmf(x,(3) S 形隶属函数S 形函数s i g m f (x ,[a c ])由参数a 和c 决定:)(11),,(c x a e c a x f --+=其中参数a 的正负符号决定了S 形隶属函数的开口朝左或朝右,用来表示“正大”或“负大”的概念。
智能控制知识点总结
智能控制知识点总结一、智能控制的基本概念1.1智能控制的定义智能控制是一种使用人工智能、模糊逻辑、神经网络等技术的控制方法。
它能够根据环境变化和系统状态自动调整控制系统的参数,以实现更加精确和高效的控制。
1.2智能控制的特点智能控制系统具有自适应性、自学习性、自组织性等特点,能够根据系统运行的实际情况自动进行调整和优化,具有较高的智能化水平。
1.3智能控制的基本原理智能控制系统基于人工智能、模糊逻辑、神经网络等技术,通过对系统的建模和分析,以及对系统状态和环境变化的监测和预测,实现自动化控制。
二、智能控制的主要技术2.1人工智能技术在智能控制中的应用人工智能技术在智能控制中的应用主要包括专家系统、模糊逻辑和遗传算法等。
专家系统通过对专家知识的模拟和应用,能够实现对复杂系统的智能控制。
模糊逻辑通过对模糊概念的建模和应用,能够处理系统的不确定性和模糊性。
遗传算法通过模拟自然界的进化过程,能够实现对控制系统的优化。
2.2神经网络技术在智能控制中的应用神经网络技术通过对生物神经系统的模拟和应用,能够实现对系统的学习和优化。
神经网络能够通过学习来适应系统的变化,从而实现更加智能化的控制。
2.3嵌入式系统技术在智能控制中的应用嵌入式系统技术通过将控制算法和硬件系统集成在一起,能够实现对系统的实时控制。
嵌入式系统能够快速响应系统的变化,实现对系统的高效控制。
2.4大数据和云计算技术在智能控制中的应用大数据和云计算技术能够对系统的运行数据进行收集和分析,对系统的状态进行监测和预测,从而实现更加智能化的控制。
2.5物联网技术在智能控制中的应用物联网技术能够实现设备之间的智能连接和通信,从而实现对设备的远程监控和控制,实现对系统的智能化管理。
三、智能控制的应用领域3.1生产制造领域在生产制造领域,智能控制系统能够实现对生产过程的自动化控制和优化,提高生产效率和产品质量。
3.2交通运输领域在交通运输领域,智能控制系统能够实现对交通信号的智能化控制,优化交通流量,减少交通拥堵。
智能控制理论及应用PPT课件

•智能控制理论概述•智能控制基础理论•智能控制技术与方法•智能控制系统设计与实现•智能控制在工业领域应用案例•智能控制在非工业领域应用案例•智能控制发展趋势与挑战目录智能控制定义与发展定义发展历程智能控制与传统控制比较控制对象传统控制主要针对线性、时不变系统,而智能控制则面向复杂、非线性、时变系统。
控制方法传统控制主要采用基于数学模型的方法,而智能控制则运用神经网络、模糊逻辑、遗传算法等智能算法。
控制性能传统控制在稳定性和精确性方面表现较好,而智能控制则在适应性和鲁棒性方面更具优势。
航空航天智能控制可以提高飞行器的自主导航能力、实现复杂任务的自主决策和执行。
智能控制可以实现车辆的自主驾驶、交通拥堵预测、路径规划等功能。
智能家居智能控制可以实现家居设备的远程控制、语音控制、场景定制等功能。
机器人控制智能控制可以实现机器人的自主导航、路径规划、动态避障智能制造智能控制应用领域1 2 3模糊集合与隶属度函数模糊关系与模糊推理模糊控制器设计模糊数学基础神经网络基础神经元模型与神经网络结构01神经网络学习算法02神经网络在智能控制中的应用03遗传算法基础遗传算法基本原理遗传算法优化方法遗传算法在智能控制中的应用模糊控制技术模糊控制基本原理01模糊控制器设计02模糊控制应用实例03神经网络控制技术神经网络基本原理神经网络控制器设计神经网络控制应用实例遗传算法优化技术遗传算法基本原理遗传算法优化方法遗传算法优化应用实例系统需求分析明确系统控制目标和任务分析系统环境和约束确定系统性能指标系统架构设计选择合适的控制策略根据系统需求和性能指标,选择合适的控制策略,如PID控制、模糊控制、神经网络控制等。
设计控制器结构根据所选控制策略,设计相应的控制器结构,包括输入、输出、算法等部分。
构建系统框架将控制器与被控对象、传感器和执行器等连接起来,构建完整的智能控制系统框架。
传感器模块控制算法模块执行器模块通信模块关键模块实现自动化生产线优化调度基于遗传算法的调度优化模糊控制在生产调度中的应用基于神经网络的调度预测01基于A*算法的路径规划02模糊逻辑在机器人导航中的应用03强化学习在机器人路径规划中的应用机器人路径规划与导航神经网络在故障预测中的应用采用神经网络对历史故障数据进行学习,预测未来可能出现的故障及其发生时间,为预防性维护提供决策支持。
第2章-3-智能控制-幻灯片(1)

智能控制的主要类型
专家控制 模糊控制 神经网络控制 学习控制 基于规则的仿人控制
2.3.2 专家控制(Expert Control)
什么是专家系统、专家控制?
“专家” 是具有某一领域专门知识或丰富实践经 验的人,而“专家系统”则是一个计算机系统,存 储有专家的知识和经验,并用推理的方式针对问题 给出结论。
u(k)
i1 6
u(ui )
i1
注:离散间隔一般较 该例小得多,计算结 果会更接近连续情况
0.210.220.530.840.85 3.72 0.20.20.50.80.8
说明:
模糊控制器的输入量一般取误差 e 和误差变化率 Δe , 若 e , Δe 和控制量 u 均离散化 [注] , 则可离 线计算好 e , Δe 与 u 的对应关系 ( 查询表 ) , 实 时控制时采用查表法 ( 计算量小, 快速 );
集合
冷μ
适中
热
1.0
0.0
T( ℃)
-20 -10 0 10 20 30 40
为简化计算, 一般用离散形式表示模糊集合。
例如,以 2 ℃ 为间隔进行离散化, 可得
“热” = 0/25 + 0.14/27 + 0.29/29 + 0.43/31 + 0.57/ 33+
+ 0.71/35 + 0.86/37 + 1/39 + 1/41 + 1/43 + 1/45
模糊控制的发展:
1965年美国的Zadeh提出模糊集合理论; 1974年英国的Mamdani首次将模糊理论应用于蒸
智能控制基础总结ppt课件
❖ 通常假设yi=f(Neti),而f为激励函数。
27/46
激励函数类型
❖ 阈值型
f
1
xf
1
(Nwei1ti
)
0ui
Neti 0 Neti 0
x2
wi2
yi
i
❖ 分段线性型
1
0
Neti
图3—1—3 阀值函数
f
xn
f (Neti )
winkNeti
0
si Neti Neti0 Neti0 Neti
智能控制问题的提出
❖ 传统控制理论,包括经典反馈控制和现代控制理论, 由于研究对象的不确定性、高度非线性以及复杂的 任务要求等,在应用中遇到不少难题。多年来,自 动控制一直在寻找新的出路。现在看来,出路之一 就是实现控制系统的智能化,以期解决面临的难题。 智能控制作为一门新兴的理论技术,现在还处于发 展初期。
❖ 智能控制的概念主要是针对控制对象及其环境、目 标和任务的不确定性和复杂性而提出来的。
❖ 是由于实现大规模复杂系统的控制需要。 ❖ 是由于现代计算机技术、人工智能和微电子学等学
科的高速发展,带来的革命性变化。
1/46
智能控制问题的提出
❖ 智能控制应用对象的特点:
(1) 不确定性模型。传统控制是基于模型的控制,认 为模型已知或者经过辨识可以得到;而智能控制的 对象通常存在严重的不确定性。 (2) 高度的非线性。传统控制理论虽然也有一些非线 性控制方法,但总的说来不够成熟,而且方法复杂, 而智能控制理论可以很好地解决非线性控制问题。 (3) 复杂的任务要求。现代工业系统很多是高度复杂 的系统。对于这些复杂系统均可用智能控制系统控 制。
❖ 规划和控制:它是整个系统
智能控制知识点

智能控制知识点智能控制是指利用计算机和其他智能技术来实现对系统或过程的自动化控制。
它是现代工程领域的重要研究方向之一,涉及到多个知识点和技术。
本文将从步骤思维的角度介绍智能控制的相关知识点。
第一步:了解智能控制的基本概念和原理智能控制是在传统控制理论基础上发展起来的一种新型控制方法。
它结合了计算机科学、人工智能、模式识别等多个学科的理论和技术,通过对系统的输入、输出和状态进行监测和分析,实现对系统的自动化控制。
智能控制方法可以提高系统的自适应性、鲁棒性和性能。
第二步:掌握智能控制的常用算法和技术智能控制涉及到多种算法和技术,包括神经网络控制、模糊控制、遗传算法、专家系统等。
神经网络控制是一种模仿人脑神经网络结构和功能的控制方法,通过训练网络模型来实现对系统的控制。
模糊控制是一种基于模糊推理的控制方法,可以处理不确定性和模糊性信息。
遗传算法是一种模拟自然遗传和进化过程的优化算法,可以用于求解控制问题中的最优解。
专家系统是基于专家知识和经验的推理系统,可以用于解决复杂的控制问题。
第三步:学习智能控制的应用案例和实践经验智能控制在各个领域都有广泛的应用,如工业自动化、交通运输、医疗设备等。
例如,在工业自动化领域,智能控制可以应用于生产线的自动化控制和优化,提高生产效率和质量。
在交通运输领域,智能控制可以应用于交通信号灯的智能优化,减少拥堵和事故发生。
学习智能控制的应用案例和实践经验可以帮助我们更好地理解和应用智能控制技术。
第四步:了解智能控制的发展趋势和挑战随着科技的不断进步,智能控制技术也在不断发展。
目前,智能控制主要关注于提高控制效果和性能,但仍面临一些挑战,如控制算法的选择和优化、系统建模和识别等。
了解智能控制的发展趋势和挑战可以帮助我们把握未来智能控制的方向和发展重点。
总结:智能控制是一门涉及多学科知识的领域。
通过了解智能控制的基本概念和原理、掌握常用的算法和技术、学习应用案例和实践经验,以及了解发展趋势和挑战,我们可以更好地理解和应用智能控制技术,为工程实践提供有效的解决方案。
智能控制基础了解

智能控制基础了解智能控制基础了解1. 简介智能控制是一种借助和控制理论相结合的方法,旨在使系统能够自动地感知环境变化,并对系统的行为做出相应的调整。
智能控制可以应用于各个领域,如工业控制、智能家居、无人驾驶等。
2. 控制理论基础控制理论是智能控制的基础,它涉及到系统建模、控制设计和控制优化等方面的知识。
主要包括以下几个要点:2.1 系统建模系统建模是指将实际系统抽象成数学模型的过程。
常见的建模方法包括物理建模、数据建模和仿真建模等。
物理建模是通过对系统的物理特性进行数学描述来建立模型,数据建模是通过对系统的采样数据进行拟合来建立模型,仿真建模是通过计算机仿真软件来建立模型。
2.2 控制设计控制设计是指根据系统的模型和控制要求设计控制器的过程。
常见的控制设计方法包括PID控制、模糊控制和神经网络控制等。
PID控制是一种经典的控制方法,通过比较系统输出和期望输出的偏差来计算控制信号,模糊控制是一种基于模糊逻辑推理的控制方法,神经网络控制则是利用神经网络来建立系统的输入与输出之间的映射关系。
2.3 控制优化控制优化是指通过调整控制器参数使系统达到最优性能的过程。
常见的控制优化方法包括最优控制、鲁棒控制和自适应控制等。
最优控制是通过数学优化方法来求解系统的最优控制策略,鲁棒控制是一种对系统参数和扰动具有鲁棒性的控制方法,自适应控制则是根据系统的实际响应来自适应地调整控制器参数。
3. 在智能控制中的应用是智能控制的重要组成部分,它能够使系统具备学习和适应能力,从而更好地应对复杂的控制任务。
常见的技术包括机器学习、深度学习和强化学习等。
3.1 机器学习机器学习是一种通过训练数据来学习系统行为并做出预测或决策的方法。
在智能控制中,机器学习可以用于系统建模、控制器设计和控制优化等方面。
通过机器学习,系统可以从大量的数据中学习到系统的模型和最优控制策略,从而提高系统的性能。
3.2 深度学习深度学习是一种基于神经网络的机器学习方法,它可以处理大规模的非线性问题,并具备自动学习特征的能力。
智能控制的知识点总结

智能控制的知识点总结智能控制是指利用计算机、人工智能和其它先进技术来控制和优化系统的运行。
它是自动化技术领域中的一个重要发展方向,应用于工业生产、交通运输、航空航天等各个领域。
1. 智能控制的基本概念智能控制是指在控制系统设计中利用先进的计算机技术和人工智能技术,实现对系统的智能化控制和优化。
智能控制系统具有自学习、自适应、自诊断和智能决策等特点,能够更加灵活、高效地进行系统控制和优化。
2. 智能控制系统的组成一个智能控制系统一般由传感器、执行器、控制器和人机界面等组成。
传感器用于采集系统的实时数据,执行器用于执行控制指令,控制器则利用计算机技术和人工智能算法对采集到的数据进行处理和分析,并输出控制指令,人机界面则用于人与系统之间的交互控制。
3. 智能控制系统的分类智能控制系统根据控制方式和控制对象的不同,可以分为多种类型,比如模糊控制系统、神经网络控制系统、遗传算法控制系统、专家系统控制系统等。
4. 智能控制系统的应用智能控制系统广泛应用于工业生产、自动驾驶、交通运输、航空航天等领域。
比如在工业生产中,智能控制系统能够实现对生产过程的智能化和自适应控制;在自动驾驶领域,智能控制系统能够实现对车辆的智能化控制和驾驶决策;在交通运输领域,智能控制系统能够实现交通信号的智能化控制和交通流量的优化。
5. 智能控制系统的发展趋势随着人工智能和计算机技术的不断发展,智能控制系统将向着更加智能化、自适应化和自学习化的方向发展。
未来的智能控制系统将更加注重人机交互、系统安全性和可靠性,以及对复杂系统的智能化控制和优化。
在智能控制系统的研究和应用过程中,需要重点关注以下几个方面的技术和问题:1. 传感器技术:传感器是智能控制系统中的重要组成部分,它能够实现对系统状态的实时监测和数据采集。
因此,传感器技术的发展和应用对智能控制系统具有重要意义。
2. 控制算法:智能控制系统的核心在于控制算法,它决定了系统的控制能力和性能。
人工智能基础09--智能控制
人工智能基础09--智能控制人工智能基础 09-智能控制在当今科技飞速发展的时代,人工智能已经成为了一个热门话题。
而智能控制作为人工智能的重要组成部分,正逐渐改变着我们的生活和生产方式。
那么,什么是智能控制呢?简单来说,智能控制就是在控制理论的基础上,融合了人工智能的技术和方法,以实现对复杂系统的更高效、更精准的控制。
传统的控制方法,如 PID 控制,在面对一些简单、线性的系统时,能够取得较好的控制效果。
但当系统变得复杂、非线性、时变或者存在不确定性时,传统控制方法往往就显得力不从心。
而智能控制则能够很好地应对这些挑战。
智能控制的实现离不开多种技术的支持。
其中,模糊逻辑控制是一种常见的方法。
模糊逻辑不像传统的布尔逻辑那样只有“是”和“否”两种明确的状态,而是引入了“模糊”的概念。
比如说,对于“温度高”这个概念,在模糊逻辑中,不是简单地定义一个固定的温度值为“高”,而是可以有“比较高”“有点高”“非常高”等不同的模糊程度。
通过这种方式,可以更灵活地处理实际系统中的不确定性和模糊性。
神经网络控制也是智能控制中的重要手段。
神经网络就像是人类大脑中的神经元网络一样,通过大量的数据训练,能够学习到系统的内在规律和特征。
一旦训练完成,神经网络就可以对新的输入数据进行准确的预测和控制。
专家系统控制则是将专家的知识和经验转化为计算机可执行的规则和策略。
当系统遇到问题时,专家系统可以根据这些规则和策略进行推理和决策,从而实现有效的控制。
智能控制在很多领域都有着广泛的应用。
在工业生产中,智能控制可以提高生产效率、保证产品质量。
例如,在自动化生产线中,通过智能控制算法,可以精确地控制机器人的动作,实现高效的生产流程。
在交通领域,智能交通系统利用智能控制来优化交通流量、减少拥堵。
比如,通过智能信号灯控制,可以根据实时的交通状况调整信号灯的时间,从而提高道路的通行能力。
在家庭生活中,智能家居系统也采用了智能控制技术。
我们可以通过手机或者语音指令,轻松地控制家中的灯光、温度、家电等设备,让生活更加便捷和舒适。
智能控制基础了解讲课文档
按照个人需要,可以在每个按键放置说明文字。 According to your likes, you can write comments on each button.
第八页,共25页。
多种触摸控制屏,可上墙可携带,集所有控制与一屏之上,更具科技感
you can either put the touchscreen on the wall or on the desk. We have wall-mount and table top touchscreens.
第十页,共25页。
乱不堪,一支“魔杖”就能管理所有娱乐活动。
这个遥控器还能控制灯光、百叶窗、温度、音乐等等。 门铃响了?不用出房间就能看到外面是谁。Control4 将 IP 摄像机和安防系统相集
成,提供可视门禁系统,让您安全地查看谁在门外。 通过有可视对讲功能的触摸屏,您可以一边欣赏电影一边留意孩子。
Just through one touch, you can control everything in your home, such as turn on the TV, play a movie or a piece of music, etc.
在准备上床睡觉时,只需按下“晚安”按钮,百叶窗合上,灯光熄灭,门落锁,安 防系统启动,所有电视机和游戏机都关闭。
just through one touch ,you can control everything you want in your home.
第十二页,共25页。
20222年年11月月99日日星星期期日日
智能控制专业知识讲座

Controller
Plant
35
--常规控制器旳监督 PID控制器模糊整定、模糊增益规划
-- 模糊控制器旳监督 规则库旳监控、监督式模糊学习控制
模糊控制与其他控制策略旳结合 + Conventional Control + Intelligent Control
36
作业4 查阅近期期刊,写一篇有关FC旳读书报 告。
(2)结论为实数值: if x=Ai , and y=Bi , then z= Zi
(3)结论为线形函数:T-S模型 日本T.Takagi和M.Sugeno于1983年提出 旳
if x=Ai , and y=Bi , then zi = C0i + C1i x + C2iy
21
模糊控制器旳主要设计原因
18
控制规则表为:
u ec e
NL NM NS 0 PS PM PL
NL NM NS 0 PS PM PL
PL PL PL PL PM 0 0
PL PL PL PL PM 0 0
PM PM PM PS 0 NS NS
PM PM PS 0 NS NM NM
PS PS 0 NS NM NM NM
0 0 NM NL NL NL NL
5
性质3 计算 Ci’= ( A’ and B’ ) ( Ai and Bi
Ci ) 旳简捷措施.(P48)
这3个性质在模糊推理计算时很有用.
模糊控制中旳模糊推理类型 教材P49 ~ P52 (1) 最小运算规则 (2) 积运算规则 (3) 单调隶属函数 (4) T-S模型措施
6
2.6 模糊控制基本原理
31
设计时,可利用线性最优控制成熟技术, 子系统设计可利用MATLAB软件,但P 要凑试。
智能控制第二章
目标──系统的性能指标。例如对稳定性的要求,
对静态工作点的寻优、对现有控制规律是否需要 改进的判断等。目标既可以是预定的,也可以是 根据外部命令或内部运行状况在线地动态建立的。
第2章 专家控制
南昌大学机电工程学院
专家控制的规则库一般采用产生式规则表示: IF 控制局势(事实和数据) THEN 操作结论 由多条产生式规则构成规则库。
第2章 专家控制
南昌大学机电工程学院
2.1.3 专家系统的建立
1.知识库
知识库包含三类知识:
(1)基于专家经验的判断性规则;
(2)用于推理、问题求解的控制性规则; (3)用于说明问题的状态、事实和概念以及当前的 条件和常识等的数据。
第2章 专家控制
南昌大学机电工程学院
知识库包含多种功能模块,主要有知识查询、
第2章 专家控制
南昌大学机电工程学院
2.1 专家系统
2.1.1 专家系统概述
1.定义 专家系统是一类包含知识和推理的智能计算机 程序,其内部包含某领域专家水平的知识和经验,
具有解决专门问题的能力。
第2章 专家控制
南昌大学机电工程学院
2.发展历史
分为三个时期:
(1) 初创期(1965-1971年)
第一代专家系统 DENLDRA 和 MACSMA 的出现,
标志着专家系统的诞生。其中 DENLDRA 为推断化
学分子 结构的 专家系 统 ,由 专家系 统的奠 基人 , Stanford 大学计算机系的 Feigenbaum 教授及其研究 小组研制。MACSMA为用于数学运算的数学专家系 统,由麻省理工学院完成。
第2章 专家控制
南昌大学机电工程学院
二、基本原理 1.结构 专家控制的基本结构如图2.2所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.3.2 一阶谓词表示法
取值为真或假的句子称为命题。 它可分为谓词和个体两部分。
谓词:用于刻划个体的性质、状态或个 体间的关系,用大写字母表示。 个体:表示某个独立存在的事物或某个 抽象的概念,用小写字母表示。
谓词的一般形式是:
P(x1,, xn )
其中P是谓词,有n个个体 xi (i 1,, n),
G: (x)(I(x) R(x)) 证明:
(F1 F2F3) →G是永真公式
2.3.3 时序逻辑表示法
将时间及其次序关系引入谓词表 达式之中,利用谓词逻辑的概念和方 法, 便构成了时序逻辑知识模型。
例:Holds (u1, t1) Holds (u2, t2) After (t2, t1) After (t3, t2) Holds (y, t3)
学习系统的基本模型
学习是系统积累经验以改善其性 能的过程,是知识的获取与改进,是 事物规律的发现过程。也就是,学习 是一个有特定目的的知识获取过程。
学习系统的基本模型
学习系统内在行为:获取知识、积 累经验、发现规律
学习系统外部表现:改进性能、适 应环境、实现系统的自我完善
学习系统的基本模型
2.1 引言
需要解决: 知识信息的分类 知识信息的表示方法 智能控制系统中的推理方法 学习系统状态空间的搜索技术
2.2 知识的基本概念
2.2.1 什么是知识 2.2.2 知识的分类
2.2.1 什么是知识
知识是人们在长期生活、社会实 践、科学研究和实验中积累起来的对 客观世界的认识和总结,然后将实践 中获得的信息关联在一起,也就构成 了知识。
事实个性性知知识识((描领述域性性 知识知)识) 过程性知识
确控定制性性知知识识
不确定性知逻识辑型知识
按知识结构及表现形式分类
形象型知识
2.3知识的表示
知识必须以适当的形式表示出来 才便于在计算机中存储、检索、使用 和修改等。
知识的表示
知识表示是一种计算机可接受的 对人类智能行为的描述。它是一种符 号模型的约定,将人类知识通过一个 符号模型映射到计算机中。
代表知识信息(学习成果),用 于存储或记忆系统通过学习所获 得的各种知识。分长期和中期记 忆两部分。
环境
学习环节
知识库
工作环节
系统的外界信息源。有关环境的 信息数据存在数据库中,它处于 在线学习时是可变的,属于短期 记忆范畴。
用于处理系统面临的现实问 题,如组合调度。从工作环 节到学习环节必须有反馈信 息,以便学习环节决定是否 进行再学习。
输入:
(x1, x2,, xn )
输出:
( y1, y2,, yn )
存储联想对:
[(x1, x2,, xn ), ( y1, y2,, yn )]
类比学习系统(Analogy Learning)
在两个相似域之间进行类比。
源域S: S s1, s2,, sn 目标域T: T t1,t2,,tn
关于海豚的定理证明形式
定义谓词: R(x): 动物x能阅读 L(x): 动物x能识字 D(x): x是海豚 I(x): x有智能 X是个体,域是每个人或动物
关于海豚的定理证明形式
已知: F1: (x)(R(x)→L(x))
F2: (x)(D(x)→L(x))
F3: (x)(D(x)I(x))
称之为n元谓词。
一阶谓词中的基本概念
基本要素:常量、变量、函数、谓 词、联接词、量词
用谓词逻辑表示状态和操作。 例:关于积木世界的问题。
基本要素
常量:某一个具体的事物 变量:不确定性事物 函数:由其他事物所确定的事物 联接词:联接谓词的逻辑符号 量词:分为全称量词和存在量词
B
B
A
C
关于积木世界的问题
定义谓词:
大写字母表示
ON(x, y):表谓词示x在y上 CLEAR(x):表示x顶上是空的 ONTABLE(x):表示x在桌子上
HOLDING(x):表示手里拿着x
HANDEMPTY:表示手是空的
关于积木世界的问题
以上谓词中,x和y是个体,个体 域为A,B和C。
关于积木世界的问题
关于积木世界的问题
操作4:
UNSTACK(x, y): 把x从y上拿开 P.D: ON (x, y), CLEAR(x), HANDEMPTY A: CLEAR(y), HOLDING(x)
关于积木世界的问题
A
C
B
B
A
C
• 操作序列:
UNSTACK PUTDOWN
(C, A)
(C)
PICKUP (B)
学习系统是指,一个系统能够从 某个过程或环境的未知特征中学到有 关信息,并且能把学到的信息用于未 来的估计、分类、决策或控制,以便 改进系统的性能。
学习系统的基本模型 学习系统的核心。是对环境信
息进行搜索、控制和逻辑思维。
通过比较、抽象、概括、综合、 推理等,以产生、修改与补充 知识。是智能系统的知识产生 器。
STACK( B,C)
பைடு நூலகம்
PICKUP (A)
STACK( A,B)
一阶谓词表示法
也称一阶谓词逻辑表示法,用一 阶谓词逻辑表示人们在问题求解时的 逻辑演绎推理过程。
例:关于海豚的定理证明形式
关于海豚的定理证明形式
已知: ①无论什么动物,能阅读即识字 ②海豚不识字 ③某些海豚有智能
证明:某人或动物有智能却不能阅读
属性、动作、状态、地点等。 弧:表示各种语义联系,指明所连接
节点的某种关系。 当多个三元组综合在一起表达时,就
可得到一个语义网络。
究竟采用哪一种表示模示,没有 统一的标准。
在确定一个知识表示模式时,首 先应考虑的是它能否充分地表示领域知 识。
2.4 知识的获取
人工智能或知识工程系统中,通 过非自动方式或自动方式实现计算机 从知识源获取知识的过程。
学习系统的分类
机械式学习系统 类比学习系统 示例学习系统 发现式学习系统 指导学习系统
机械式学习系统(Rote Learning)
又称记忆学习。是一种最简单、最 基本的学习方法,无推理过程,是从特 殊到特殊的学习过程。通过从知识库中 检索相应的知识,直接求解问题。
机械式学习系统
力
知识、规则、数据、信息之间的关系
规则:把关联起来的知识称为规则。 事实或原子事实:把不与其他信息关 联的信息称为事实或原子事实。
知识、规则、数据、信息之间的关系
数据:描述客观事物的属性、数量、 位置以及相互关系。是信息的载体和 表示。它可以是数,也可以是字符串。 信息:是数据在特定场合下的具体 含义,或是数据的语义。
关于积木世界的问题
操作2:
PUTDOWN(x): 放x在桌上 P.D: HOLDING(x) A: CLEAR(x), ONTABLE(x), HANDEMPTY
关于积木世界的问题
操作3:
STACK(x, y): 把x放在y上 P.D: CLEAR(y), HOLDING(x) A: ON (x, y), CLEAR(x), HANDEMPTY
框架网络
把多个相互关联的框架 连接起来组成的框架
2.3.5 语义网络知识表示法
语义网络(Sematic Network) 是通 过概念及其语义关系来表达知识的一 种网络图,由节点和连接节点的弧构 成。其基础是一种三元组。
(下层概念) (上层概念)
是一种
猎狗
狗
(节点)
(节点)
结构(节点1,弧,节点2) 节点:表示各种事物、概念、情况、
非自动知识获取是指知识是通过 知识工程师和知识编辑器传授给知识 库的。
知识编辑器是一类程序设计系统, 包括语法检查、一致性检查、自动薄 记、知识抽取等功能。
知识工程师
领域专家
知识编辑器
知识库
非自动知识获取
2.4.2 自动知识获取
全自动知识获取是让计算机直接 从环境中获取全部信息。包括机器感 知(主要是计算机视觉和听觉)、机 器识别和机器学习等。
知识表示法(知识表示模式/技术)
状态空间 表示法
产生式表 示法
一阶谓词 逻辑表示 法
框架表 示法
Petri网络表 示法
神经网络知 识表示法
定性模型知 识表示法
不确定性 (模糊)知 识表示法
时序逻辑表 示法
语义网络表 示法
可视知识模 型表示法
…….
2.3.1 状态空间表示法
状态、操作和状态空间的概念 状态空间图示法
简言之,知识是把有关信息关联在 一起所形成的信息结构。
应用最多的关联形式是“IF-THEN” 形式,它反映了信息间的某种因果关系。
知识、规则、数据、信息之间的关系
人类大量 的
智能活动:是人类获取知识并运用
知识的过程。
知识:是智能的基础。
要使计算机具有智 能的话,就必须使 计算机具有获取知 识和运用知识的能
初始状态QS: CLEAR(C)
CLEAR(B) ONTABLE(A)
C
B
A
ONTABLE(B) ON(C,A)
HANDEMPTY
关于积木世界的问题
目标状态Qg:
ONTABLE(C)
ON(B,C)
A B
C
ON(A,B)
CLEAR(A)
HANDEMPTY
关于积木世界的问题
操作1:
PICKUP(x): 拿起x P.D: CLEAR(x), ONTABLE(x), HANDEMPTY A: HOLDING(x)
2.3.4 产生式表示法
又称为规则或产生式规则。通常 用于表示具有因果关系的知识。