电机控制集成电路的选用第十三讲微型电机驱动控制芯片MAX1749的应用
电机驱动IC控制无刷电机
电机驱动IC控制无刷电机电机驱动IC控制无刷电机无刷电机(Brushless DC Motor,简称BLDC)因其高效率、高转矩、寿命长等优点,在工业自动化、家电、汽车等领域得到广泛应用。
而电机驱动IC作为控制无刷电机的核心部件,起着至关重要的作用。
本文将重点探讨电机驱动IC如何控制无刷电机,以及其在应用中的一些特点。
一、电机驱动IC的原理与功能电机驱动IC是一种专门用于控制无刷电机运行的集成电路芯片。
其主要通过对电流、电压和PWM信号等进行控制,实现对无刷电机的转速和转向的控制。
电机驱动IC一般包括三个关键部分:功率驱动模块、控制逻辑模块和保护模块。
1. 功率驱动模块:负责将来自电源的直流电转换为无刷电机所需的三相交流电。
通常采用半桥驱动电路或全桥驱动电路,通过对功率管的开关控制,控制电机的正反转和速度。
2. 控制逻辑模块:负责接受外部控制信号,并根据信号控制功率驱动模块的工作状态。
常用的控制算法有霍尔传感器控制和无霍尔传感器控制两种。
3. 保护模块:负责对电机驱动IC和无刷电机进行保护,包括过压保护、欠压保护、过流保护、过热保护等功能。
保护模块的存在可以有效提高电机和驱动IC的使用寿命。
二、电机驱动IC的工作模式电机驱动IC在实际应用中可以采用不同的工作模式,常见的有直流刷永磁电机模式、霍尔传感器控制模式和无霍尔传感器控制模式。
1. 直流刷永磁电机模式:在这种模式下,电机驱动IC对无刷电机的转速和转向进行控制,主要通过PWM信号对功率驱动模块进行控制。
同时,利用霍尔传感器或无霍尔传感器来检测电机的转子位置,以实现准确的控制。
2. 霍尔传感器控制模式:在这种模式下,电机驱动IC通过读取霍尔传感器输出的信号,确定转子当前位置,从而对电机进行精准的控制。
该模式在转速和转向的控制上具有较高的灵活性和精度。
3. 无霍尔传感器控制模式:在这种模式下,电机驱动IC不依赖于外部传感器,通过内部算法推算转子位置,实现对电机的控制。
电机驱动芯片
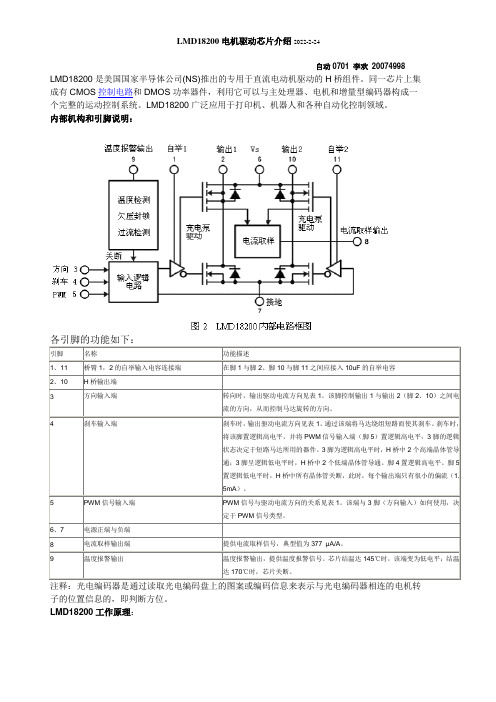
自动0701 李欢20074998LMD18200是美国国家半导体公司(NS)推出的专用于直流电动机驱动的H桥组件。
同一芯片上集成有CMOS控制电路和DMOS功率器件,利用它可以与主处理器、电机和增量型编码器构成一个完整的运动控制系统。
LMD18200广泛应用于打印机、机器人和各种自动化控制领域。
内部机构和引脚说明:引脚名称功能描述1、11 桥臂1,2的自举输入电容连接端在脚1与脚2、脚10与脚11之间应接入10uF的自举电容2、10 H桥输出端3 方向输入端转向时,输出驱动电流方向见表1。
该脚控制输出1与输出2(脚2、10)之间电流的方向,从而控制马达旋转的方向。
4 刹车输入端刹车时,输出驱动电流方向见表1。
通过该端将马达绕组短路而使其刹车。
刹车时,将该脚置逻辑高电平,并将PWM信号输入端(脚5)置逻辑高电平,3脚的逻辑状态决定于短路马达所用的器件。
3脚为逻辑高电平时,H桥中2个高端晶体管导通;3脚呈逻辑低电平时,H桥中2个低端晶体管导通。
脚4置逻辑高电平、脚5置逻辑低电平时,H桥中所有晶体管关断,此时,每个输出端只有很小的偏流(1.5mA)。
5 PWM信号输入端PWM信号与驱动电流方向的关系见表1。
该端与3脚(方向输入)如何使用,决定于PWM信号类型。
6、7 电源正端与负端8 电流取样输出端提供电流取样信号,典型值为377 µA/A。
9 温度报警输出温度报警输出,提供温度报警信号。
芯片结温达145℃时,该端变为低电平;结温达170℃时,芯片关断。
注释:光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的,即判断方位。
LMD18200工作原理:内部集成了四个DMOS管,组成一个标准的H型驱动桥。
通过充电泵电路为上桥臂的2个开关管提供栅极控制电压,充电泵电路由一个300kHz左右的工作频率。
可在引脚1、11外接电容形成第二个充电泵电路,外接电容越大,向开关管栅极输入的电容充电速度越快,电压上升的时间越短,工作频率可以更高。
毕业设计基于maxii系列cpld的微波炉控制器芯片设计

毕业设计基于maxii系列cpld的微波炉控制器芯片设计浙江科技学院嵌入式系统(EDA技术)课题名称院、系专业班级:姓名:学号:指导教师:课程设计报告书基于MAX II系列CPLD的微波炉控制器芯片设计自动化与电气工程学院建筑电气智能化::完成日期: 2021年12月17日目录第一章绪论 ........................................................................... ....... 1 第二章设计目的 ...........................................................................2 第三章设计要求 (3)3.1 微波炉的功能要求 ............................................................. 3 3.2设计步骤 ............................................................................3 第四章设计思想 (4)4.1微波炉定时器的工作过程 ................................................... 4 4.2根据系统的基本要求 .......................................................... 4 第五章设计内容 (5)5.1状态控制电路模块 ........................................................ 8 5.2数据装载电路模块 ........................................................ 9 5.3计时器模块 ................................................................ 10 5.4状态控制源程序 ......................................................... 13 5.5控制器仿真及分析 (24)设计总结 ........................................................................... ........... 27 感言 ........................................................................... ................ 28 参考文献 ........................................................................... .. (30)I第一章绪论随着人们生活水平的提高和信息化的发展,家用电器层出不穷,各种功能也越来越完善,其中微波炉是现代家庭的必备产品已经成为人们日用生活中的必不可少的厨房电器,大大降低了家庭妇女的工作量和工作强度,它的质量和性能的高低,将会极大的影响人们的生活水平和质量。
AT8837 DRV8837中科微马达驱动IC应用资料

描述AT8837为摄像机、消费类产品、玩具和其它低电压或者电池供电的运动控制类应用提供了一个集成的电机驱动器解决方案。
AT8837能够驱动一个直流电机或其他诸如螺线管的器件。
输出驱动模块由N MOS功率管构成的H桥组成,以驱动电机绕组。
AT8837 能够提供高达15V 1A的驱动输出。
AT8837 具有一个PWM (IN/IN) 输入接口。
内部关断功能包含过流保护,短路保护,欠压锁定保护和过温保护,并提供一个错误输出管脚。
AT8837提供一种带有裸露焊盘的DFN-8(2mm*2mm)封装,且是无铅产品,引脚框采用100%无锡电镀。
应用⏹锂电池供电玩具⏹摄像机、相机调焦驱动⏹消费类产品⏹办公自动化设备⏹游戏机⏹机器人型号选择产品型号封装包装AT8837DFN-8编带,5000颗/盘特点●单通道H桥电机驱动器●低RDS(ON)电阻●1A驱动输出●宽电压供电,2.7-15V●脉宽调制(PWM)输入,IN1/IN2 ●支持SLEEP关断休眠●过温关断电路●短路保护●欠压锁定保护封装形式DFN-8典型应用原理图功能结构框图电特性 at Ta = 25°C, VM= 5 V,VCC=3.3V时序要求TA = 25°C, VM = 5 V, VCC = 3.3 V, RL = 20 Ω序号参数说明最小值最大值单位1t1输出使能延迟360ns2t2输出关闭延迟360ns3t3输入到输出上升延迟360ns4t4输入到输出下降延迟360ns5t5上升时间3060ns6t6下降时间3060nsSLEEP 后,芯片使能时间50us模块功能描述AT8837 为单路刷式直流电机或者螺线管提供一种集成的驱动方案。
芯片内部集成单通道 H 桥和电荷泵电路。
AT8837 提供 15V 1A 峰值输出。
简单的 PWM(IN1/IN2)接口允许简单的接口控制电路。
AT8837 还包含一个低功耗睡眠模式,允许不需要驱动芯片的时候节省功耗。
讲稿06_基本IC简介
广州大学 机电学院 庞志
一、驱动电路:MC1413 (4) 驱动电路:
2010年12月27日星期一
广州大学 机电学院 庞志
LED点阵 点阵。 讲稿06_点阵) 06_点阵 例: LED点阵。(讲稿06_点阵)
2010年12月27日星期一
广州大学 机电学院 庞志
二、隔离电路:光偶 (1) 隔离电路: )
2010年12月27日星期一
广州大学 机电学院 庞志
一、驱动电路:MC1413 (1) 驱动电路: ) 驱动电路:ULN2003
MC1413 NPN达林顿晶体 NPN达林顿晶体 管驱动阵列。 管驱动阵列。 放大倍数大, 放大倍数大,驱动能力 内有保护钳位二极管。 强,内有保护钳位二极管。 可以直接驱动各种指示 继电器、 LED显示器 显示器、 灯、继电器、7段LED显示器、 小功率的步进电机等; 小功率的步进电机等;
功能参数:(资料) 引脚图、 1、引脚图、 基本电性能。 2、基本电性能。
2010年12月27日星期一
广州大学 机电学院 庞志
六、串口电平转换:MAX485 (2) 串口电平转换:
2010年12月27日星期一
广州大学 机电学院 庞志
附录1、实验 附录1
题目: 基本IC测试 基本IC测试
2010年12月27日星期一
2010年12月27日星期一
广州大学 机电学院 庞志
三、串转并:HC595 (1) 串转并:
功能参数:(手册) 引脚图、 1、引脚图、 真值表、 2、真值表、 逻辑图、 3、逻辑图、 基本电性能。 4、基本电性能。
2010年12月27日星期一
广州大学 机电学院 庞志
三、串转并:HC595 (2) 串转并:
PMM8713应用
步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
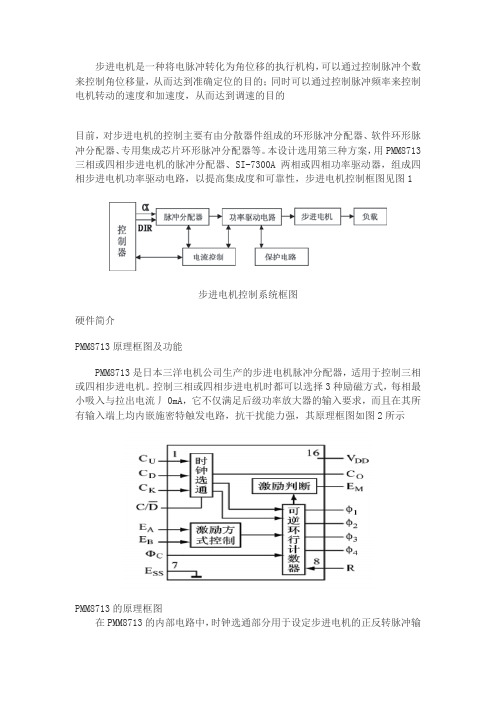
本设计选用第三种方案,用PMM8713三相或四相步进电机的脉冲分配器、SI-7300A两相或四相功率驱动器,组成四相步进电机功率驱动电路,以提高集成度和可靠性,步进电机控制框图见图1步进电机控制系统框图硬件简介PMM8713原理框图及功能PMM8713是日本三洋电机公司生产的步进电机脉冲分配器,适用于控制三相或四相步进电机。
控制三相或四相步进电机时都可以选择3种励磁方式,每相最小吸入与拉出电流丿0mA,它不仅满足后级功率放大器的输入要求,而且在其所有输入端上均内嵌施密特触发电路,抗干扰能力强,其原理框图如图2所示PMM8713的原理框图在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入发。
PMM8713有两种脉冲输入法:双脉冲输入法和单脉冲输入法。
采用双脉冲输入法时,CP、CU两端分别输入步进电机正反转的控制脉冲。
当采用单脉冲输入时,步进电机的正反转方向由U/D的高、低电位决定。
激励方式控制电路用来选择采用何种励磁方式。
激励方式判断电路用于输出检测;而可逆环形计数器则用于产生步进电机在选定的励磁方式下的各相通断时序信号。
SI-7300A的结构及功率驱动原理SI-7300A是日本三青公司生产的高性能步进电机集成功率放大器,该器件为单极性四相驱动,采用SIP18封装步进电机功率驱动级电路可分为电压和电流两种驱动方式。
电流驱动方式最常用的是PWM恒流斩波驱动电路,也是最常用的高性能驱动方式,其中一相的等效电路图如图所示LM331电压/频率变换电路LM331芯片LM331是美国国家半导体公司生产的双列直插式8脚芯片,只需接入几个外部元件就可以方便地构成电压/频率(V/F)变换电路,电路如图所示图四相步进电机功率驱动电路LM331的输出频率和输入电压存在如下关系:f0=Vi/(IRt1RL),其中t1外接的定时元件Rt和Ct决定,t1=1.1RtCt,IR由内部精密电流源提供,IR1.9V/RS。
电气工程及其自动化专业毕业论文-单片机电机控制
xx大学毕业设计(论文)题目:单片机实现的步进电机控制系统设计作者:系(部):专业班级:指导教师:职称:20 年月日步进电机控制系统的组成如图4.1所示:图4.1 控制系统图3、本课题需要重点研究的、关键的问题及解决的思路[8]步进电机控制程序设计的主要问题有三个:第一、控制脉冲产生;第二、步进电机的旋转方向和时序脉冲的关系;第三、步数的确定。
作为单片机控制步进电机的程序的构成也是主要由这几个问题,因此可以从这三个问题入手:(1)控制脉冲的产生在单片机控制步进电机时,一般来讲,控制是用软件产生的。
方法是先输出一个高电平,然后延时,再输出低电平,再进行延时。
延时时间的长短由步进电机的工作频率决定。
(2)步进电机的旋转方向和时序脉冲的关系产生时序脉冲的方法是:1 单片机的IO 端口,分别控制三相步进电机的A, B, C 三相绕组;2 控制模式写出控制模型;2 制模型的顺序向步进电机输入控制脉冲。
(3)步数的确定步进电机运行的步数可由步距角和需要转过的角度来计算:NZ r b ⋅︒=360θ 式中:b θ-步距角;r Z -转子齿数; N -拍数(一般三拍时N =m 或六拍时N =2m );m -控制绕组相数,m =3毕业设计(论文)任务书学生姓名_1111指导教师_黄云龙、廖东进、朱秋琴职称副教授、助教、助教系别_信息与电子工程系_专业电气年级 03级___班级课题名称单片机实现的步进电机控制系统设计任务与要求:一、设计(论文)要求:本课题的主要任务是通过单片机控制系统,实现对步进电机工作状态的控制。
具体设计方案如下:本设计采用凌阳16 位单片机SPCE061A对步进电机进行控制,通过IO 口输出的具有时序的方波作为步进电机的控制信号,信号经过芯片L298N驱动步进电机;同时,用4X4的键盘来对电机的状态进行控制,并用数码管显示电机的转速,采用74LS164作为4位单个数码管的显示驱动,从单片机输入信号;利用凌阳单片机的语音功能播报电机的转速。
西门子 NXGPro+ 控制系统手册_操作手册说明书
3.4
单元通讯的协议 ............................................................................................................ 36
3.5
NXGpro+ 高级安全 .......................................................................................................37
3.2
功率拓扑 ......................................................................................................................34
3.3
控制系统概述 ...............................................................................................................35
NXGPro+ 控制系统手册
NXGPro+ 控制系统手册
操作手册
AC
A5E50491925J
安全性信息
1
安全注意事项
2
控制系统简介
3
NXGPro+ 控制系统简介
4
硬件用户界面说明
5
参数配置/地址
6
运行控制系统
7
高级的操作功能
8
软件用户界面
9
运行软件
10
故障和报警检修
11
3.7v无刷电机驱动电路
3.7v无刷电机驱动电路
无刷电机是一种常见的电机类型,通常使用直流电源进行驱动。
在驱动无刷电机时,需要一个特定的电路来控制电机的转速和方向。
一般来说,3.7V电压是一种常见的电源供应电压,因此我们可以设
计一个简单的无刷电机驱动电路来满足这一需求。
首先,我们需要一个电机驱动器或者电机控制器,这个控制器
可以是专门为无刷电机设计的驱动器芯片,比如常见的L298N、
L293D等芯片,也可以是专门的无刷电机控制模块。
这个控制器可
以接收来自微控制器或者其他信号源的控制信号,以控制电机的转
速和方向。
其次,我们需要一个电源管理电路,用来将3.7V的电源电压转
换为控制电机所需的电压。
这可以通过使用稳压芯片或者DC-DC升
压/降压模块来实现。
这样可以确保电机能够获得稳定的工作电压。
另外,为了确保电机的安全和稳定运行,我们还需要考虑加入
过压保护、过流保护和过热保护电路,以防止电机受到损坏。
最后,如果需要控制电机的转速和方向,我们还需要一个控制
信号的源,比如微控制器、单片机或者其他信号发生器,用来生成控制信号,以控制电机的转速和方向。
总的来说,设计一个3.7V无刷电机驱动电路需要考虑电机驱动器、电源管理、保护电路和控制信号源等多个方面,以确保电机能够稳定、安全地工作。
希望这个回答能够满足你的需求。
基于PLC的雕刻机控制系统设计说明书
目录1 绪论 (1)1.1 课题的研究意义 (1)1.2 雕刻机的应用及发展 (1)1.2.1 雕刻机的应用 (1)1.2.2 国内外发展与现状 (2)1.3 课题研究的主要内容 (3)1.3.1 实验平台简介 (3)2方案选择 (4)2.1三轴驱动方案选择 (4)2.1.1直流驱动 (4)2.1.2 交流伺服驱动 (5)2.1.3 步进驱动 (5)2.2 控制器的选择 (6)2.3限位开关 (7)3硬件电路设计 (9)3.1主电路设计 (9)3.1.1步进电机及步进驱动器 (9)3.1.2 主轴及变频驱动 (9)3.2控制电路设计 (11)3.2.1控制要求 (11)3.2.2 步进电机驱动器 (12)3.2.3 PLC选型 (14)3.2.4 I/O配置及PLC外部接线图 (16)4软件设计 (18)4.1 PTO/POS配置 (19)4.1.1 PTO配置 (19)4.1.2 PTO/PWM组件 (29)4.2主程序 (30)5总结 (33)致谢 (33)基于PLC的雕刻机控制系统设计摘要自从有了人类的社会活动以后,就有了雕刻这一行业,伴随着人类社会的发展,如今人们对雕刻有了全新的认识,随着人们对雕刻机的认识和掌握逐步加深,应用范围会得到不断扩大,应用水平也会逐步提高,雕刻加工必定会有更广阔的前景。
本文论述了雕刻机的控制要求及驱动方式,设计了基于PLC控制的三维雕刻机的电气控制线路,并编制了实现轨迹运行的控制程序。
三维雕刻机为滚珠丝杠设计,X、Y、Z三轴采用步进系统,分别通过CPU的高速脉冲输出PTO及定位模块EM253实现三根轴的位置控制,主轴采用交流变频驱动,系统中设置了限位开关和位置感应器以防止运动超程。
调试结果表明,系统可以实现一定精度的雕刻轨迹控制,达到了设计指标的要求。
关键词:雕刻机;PLC;位置控制;滚珠丝杠ABSTRACT Ever since human social activity later, there is a sculpture of the industry, along with the development of human society, and now people have a new understanding of sculpture ,engraving machines as people gradually deepening understanding and grasp the scope of application will been expanding the application level will gradually increase ,engraving process must be more broad prospects.This paper discusses the requirements and drive mode control engraving machine, the design of PLC-based electrical control circuit controls the three-dimensional engraving machine and prepared to achieve trajectory control program running. Three-dimensional engraving machine for the ball screw design, X, Y, Z-axis stepper system ,respectively, to achieve three-axis position control with high-speed pulse output PTO and the positioning module EM253 CPU, the spindle AC variable frequency drive, the system set up limit switches and position sensors to prevent over travel movement Debugging results show that the system can achieve a certain precision engraving trajectory control, met the requirements of the design specifications.Keywords:Engraving machine; Position Control; ball screw shaft1 绪论1.1 课题的研究意义自从有了人类的社会活动以后,就有了雕刻这一行业,伴随着人类社会的发展,现如今人们对雕刻有了全新的认识,电脑雕刻加工的兴起与发展是时代发展的需要,电脑雕刻代替机械雕刻已是大势所趋。
步进电机驱动芯片选型指南

以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
电机驱动IC控制电机运转

电机驱动IC控制电机运转电机驱动IC控制电机运转电机驱动IC是一种专门用于控制电机运转的集成电路。
它内部包含了多个功能模块,能够根据特定的输入信号驱动电机实现旋转或转动。
电机驱动IC的应用非常广泛,涵盖了各个领域,包括家用电器、电动工具、汽车等。
一、电机驱动IC的基本功能电机驱动IC的基本功能是将输入信号转换为电机驱动信号。
它接收来自外部的控制信号,根据信号特征进行处理,然后输出给电机。
这样,电机就能够按照预定的规律进行运转。
电机驱动IC的输入信号可以是来自外部的模拟信号,也可以是数字信号。
它包含了模拟转换电路、模拟运算电路、数字处理电路等多个功能模块,能够适应不同类型的输入信号。
通过这些功能模块的协同工作,电机驱动IC能够将输入信号转换为驱动电机所需的电压、电流或频率等。
二、电机驱动IC的工作原理电机驱动IC的工作原理涉及多个方面,其中包括信号采集和处理、驱动输出、保护功能等。
1. 信号采集和处理电机驱动IC首先对外部输入信号进行采集。
对于模拟信号,它通过模拟转换电路将信号转换为数字形式,然后传递给数字处理电路进行处理。
对于数字信号,它直接传递给数字处理电路进行处理。
在数字处理电路中,电机驱动IC可以根据需要进行信号放大、滤波、变换等操作。
这些操作能够增强信号的稳定性和可靠性,从而更好地适应电机的运转需求。
2. 驱动输出电机驱动IC根据经过处理的信号,生成驱动电机所需的输出信号。
这些输出信号包括电源电压、电机电流、PWM信号等。
电机驱动IC内部集成了功率放大器、MOS管、三极管等驱动元件,通过它们可以输出所需的电压、电流或频率,从而驱动电机运转。
3. 保护功能为了保证电机运转的安全可靠,电机驱动IC通常还内置了多种保护功能。
这些保护功能包括过流保护、过温保护、过压保护等。
当电机运转时出现异常情况时,电机驱动IC会自动断开驱动信号,以保护电机和驱动电路的安全。
三、电机驱动IC的应用举例电机驱动IC在各个领域都有广泛的应用。
电机驱动芯片原理

电机驱动芯片原理
电机驱动芯片是一种集成电路芯片,用于控制和驱动电机的运动。
它通常由多个功能模块组成,包括电流检测、PWM生成、保护电路等。
其工作原理可以简单地描述如下:
1. 电流检测模块:电机驱动芯片会通过内部的电流检测模块,实时检测电机的工作电流。
这样可以监测电机的工作状态,以便及时调整控制信号,保证电机的正常运转。
2. PWM生成模块:电机驱动芯片通常会集成PWM(脉冲宽
度调制)生成电路,用于调节电机的速度和转向。
通过控制PWM的占空比(高电平时间占总周期时间的比例),可以精
确地控制电机的转速。
通常,占空比越大,电机的平均速度越快。
3. 保护电路:电机驱动芯片还会包含多种保护电路,以确保电机的安全运行。
例如,过流保护可以监测电机工作电流是否超过设定值,并及时切断电源,防止电机损坏。
过热保护可以检测电机温度,并在温度过高时采取措施(如减小PWM占空比
或降低电压)保护电机。
4. 控制接口:电机驱动芯片通常会提供控制接口,用于连接外部控制器(如微处理器、单片机等)。
通过控制接口发送相应的信号,可以实现对电机的速度、方向、加减速等操作。
其中,速度和方向可以通过PWM信号调节,而加减速可以通过逐渐
改变PWM占空比来实现。
总之,电机驱动芯片通过检测电机电流、生成PWM信号、提
供保护功能和控制接口等方式,实现对电机的精确控制和保护,使其可以按照预定的速度和方向进行运动。
电机驱动与控制专用集成电路及应用

电机驱动与控制专用集成电路及应用下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!随着电机在各种领域的广泛应用,电机驱动与控制技术越发受到重视。
常用IC型号及功能查询
嵌入式常用IC芯片1.电源变换IC芯片7800 三端,固定正电压输出稳压器(块)芯片7900 三端,固定负电压输出稳压器(块)芯片AD580 三端,精密电压基准芯片ADR290/291/292/293 高精度,新型XFET 3端基准电源芯片D14,D24 DC-DC隔离电源模块HV-2405E 50mA,5~24V,AC/DC电源IC芯片HQA-2405E AC/DC电源变换器模块IMP706 低功耗,uP电源监控IC芯片LM117/217/317 3端,可调正电压输出稳压芯片LM137/237/337 3端,可调负电压输出稳压(块)芯片LM138/238/338 3端,大电流,可调正电压输出稳压(块)芯片LM150/250/350 3端,大电流,可调正电压输出稳压(块)芯片LM2930 汽车用3端稳压器芯片LT108X/SP116XX 3端,低电压,输出可调稳压器芯片M5236L/37L 灵活方便,低电压差,3端稳压驱动芯片MAX610 无变压器式,AC/DC电源变换器IC芯片MAX619 输入2V,输出5V,充电泵DC/DC变换器IC芯片MAX629 DC/DC转换芯片MAX638 过低电压检测报警,降压开关型,DC/DC电源变换器IC芯片MAX639 过低电压检测报警,降压开关型,DC/DC电源变换器IC芯片MAX682-685 低电压差,微功耗稳压器芯片MAX706 电压监控芯片MAX813L 看门狗,电压监控芯片MAX889 2MHZ稳压型电荷泵,负电压输出,DC/DC变换器芯片MAX1606 输入5V,输出28V,LCD偏置电源DC/DC芯片MAX1642/1643 输入电压仅为1V的DC/DC变换器芯片MAX1692 1.8V,降压型,微型开关,DC/DC芯片MAX1725/1726 更低功耗,低压差,线性稳压器芯片MAX1742/1842 内含1A开关,1MHz,降压型DC/DC芯片MAX1744/1745 36V输入,10W输出,降压型转换器芯片MAX1730/1759 稳压型,电荷泵,DC/DC芯片MAX1775 双路,降压型,2A以上,DC/DC芯片MAX1832/1833/1834/1835 电池反接保护,升压型DC/DC转换器芯片MAX1864/1865 降压型,DC/DC,5路输出线缆MODEM电源芯片MAX5130+PIC 精确可编程,8000基准电压值,DC/DC发生器芯片MAX6125 微封装,微功耗,微漂移,DC/DC芯片MAX6129 功耗更低,串联型,3端,电压基准芯片MAX6333 监视电压可低至1.6V的新型单片复位IC芯片MAX6821-6825 手动复位,“看门狗”定时器,低功耗,UP监控电路芯片MAX828/829 充电泵,反压型,DC/DC芯片MAX8880/8881 带有电源好2(POWDWR-OK)输出的DC/DC芯片MAX8883 双路,低压差,线性稳压器芯片MC1403 8脚精密电压基准芯片MIC2141 微功耗,升压型,V0可控,DC/DC变换器芯片PS0500-5 500mA,超小型,AC/DC电源变换芯片TOP1xx-2xx 无变压器,5W以上,AC/DC变换式精密开关电源IC芯片TL499AC 可调线型串联稳压器和升压型开关稳压器(合成稳压器)芯片TPS7350 5V固定输出,掉电延时复位,低压差稳压器芯片W431 3端,可调式电压基准芯片YA-S AC/DC电源变换器模块2.数字温度传感器AD526 增益可编程运算放大器芯片AD620 低功耗,高精密度仪器用运放芯片AD623 单电源Rail-Rail仪表运放芯片AD625 增益可编程运算放大器芯片AD626 单电源差分运算放大器芯片AD7416 带IIC接口,10位低功耗数字温度传感器芯片AD8571/8572/8574 0温漂,单电源,运算放大器芯片AD8591/8592/8594 带节能控制端的CMOS,单电源工作,满电源输入输出,运算放大器芯片DS1620 数字式温度传感器IC芯片DS1621 数字式温度传感器IC芯片及恒温控制器IC芯片DS1625 数字温度计和控温器芯片DS1629 2线接口,带有实时时钟的温度传感器芯片DS1820 数字式温度传感器IC芯片ITT2301AF 射频功率放大器芯片LM76 带数字温度传感器,IIC总线接口,12位信号输出,测温芯片LM92 数字式温度传感器芯片MAX54xx 体积更小,256级,数字电位器芯片MAX4265~4270 超低失真,单+5V,300MHz,运算放大器芯片MAX4430/4431/4432/4433 高速(280MHz),高精度,宽频带,单/双运算放大器芯片MAX6627/6628 兼容SPI接口的远端结温检测器芯片MAX6629/6630/6631/6632 微型SOT封装,+-1摄氏度精度的数字温度传感器芯片MAX6657/6658/6659 +-1摄氏度的本地和远端结温检测器芯片OP193/293/493 精密,微功耗,运算放大器芯片OP177 超精密运算放大器芯片OP777 精密,微功耗,单电源,运算放大器芯片MIC91x 高速(100~350MHz)运算放大器芯片X9241 IIC接口,数字电位器(EEPOT)IC芯片X9312 数字电位器IC芯片X9313 数控电位器芯片X9511 PushPOT按钮控制电位器芯片3.电机控制及驱动芯片87C196MC 电机控制专用微处理器芯片CIPH9803 可编程步进电机控制IC芯片FR-Z240-7.5K 变频调速器芯片HEF4752V PWM大规模集成电路芯片IR2110 高压浮动MOSFET,栅极步进电机驱动器IC芯片LM628 直流电机运动控制芯片LM1542 无刷直流电机控制器芯片LMD18200 H桥组件电机驱动芯片MA818 3相PWM,变频调速专用控制器芯片MAX1749 微型直流电机驱动控制芯片MC33033 带温度补偿的直流电机控制器芯片ML4428 无传感器PWM,无刷直流电机控制器芯片MOC30xx 双向晶闸管电机控制驱动器(双向光电耦合器)IC芯片MTE1122 智能型电机驱动运放芯片PA03 大功率(1000w)运放电机驱动芯片PA21/25/26 双功率电机驱动运放芯片PA61 大功率运放电机驱动芯片PA85 高压,高速,大功率,运放驱动芯片PBL3772/PBM3960 高性能步进电机驱动IC芯片组PH2083 多模式步进电机控制器IC芯片PMM8713 步进电机专用控制芯片SA06 脉宽调制运放,电机驱动芯片SA60 脉宽调制型功放芯片SA866 可编程,全数字化,3相PWM,变频调速控制器IC芯片ST6210 通用电机驱动电路(MCU)IC芯片TDA1085C 通用电机速度控制器芯片UCx637XC9536 PWM型直流电机驱动芯片XC9536 步进电机CPLD控制芯片4.数字通信IC芯片及接口5G16C550ACM1330E/1550DACMTX16/ACMRX18ADM101EAM7910Core 01DS14C232C/232TDS26F31DS26C32DS3695/3696/3697/3698DS8921DS8922DS9637DS9638DS14185DS75176DS96172/96174DS96173/96175HT9200AICL232KX50xxLM1893LMx3162M303S/303RM-8888MAX48x/49xMAX202MAX202E/211E/213E/232E/241EMAX214MAX220/232/232AMAX250/251MAX1480A/1480BMAX3080E-3089EMAX3082MAX3100MAX3140MAX3222/3232MAX3224~3227MAX3238E/3248E常用集成电路功能简介型号功能简述1710 视频信号处理集成电路2274 延迟集成电路2800 红外遥控信号接收集成电路4094 移位寄存串入、并出集成电路4260 动态随机存储集成电路4464 存储集成电路4558 双运算放大集成电路5101 天线开关集成电路15105 充电控制集成电路15551 管理卡升压集成电路31085 射频电源集成电路74122 可重触发单稳态集成电路85712 场扫描信号校正处理集成电路85713 行扫描信号校正集成电路0206A 天线开关集成电路03VFG9 发射压控振荡集成电路1021AC 发射压控振荡集成电路1097C 升压集成电路140N 电源取样比较放大集成电路14DN363 伺服控制集成电路1N706 混响延时集成电路20810-F6096 存储集成电路2252B 微处理集成电路24C01ACEA 存储集成电路24C026 存储集成电路24C04 存储集成电路24C64 码片集成电路24LC16B 存储集成电路24LC65 电可改写编程只读存储集成电路27C1000PC-12 存储集成电路27C2000QC-90 存储集成电路27C20T 存储集成电路27C512 电可改写编程只读存储集成电路28BV64 码片集成电路28F004 版本集成电路32D54 电源、音频信号处理集成电路32D75 电源、音频信号处理集成电路32D92 电源中频放大集成电路4066B 电子开关切换集成电路424260SDJ 存储集成电路4270351/91B9905 中频放大集成电路4370341/90M9919 中频处理集成电路4580D 双运算放大集成电路47C1638AN-U337 微处理集成电路47C1638AU-353 微处理集成电路47C432GP 微处理集成电路47C433AN-3888 微处理集成电路49/4CR1A 中频放大集成电路5G052 发光二极管四位显示驱动集成电路5G24 运算放大集成电路5W01 双运算放大集成电路649/CRIA70612 中频放大集成电路673/3CR2A 多模转换集成电路74HC04 逻辑与非门集成电路74HC04D 六反相集成电路74HC123 单稳态集成电路74HC125 端口功能扩展集成电路74HC14N 六反相集成电路74HC157A 多路转换集成电路74HC165 移相寄存集成电路74HC245 总线收发集成电路74HC32 或门四2输入集成电路74HC374八D 触发集成电路74HC573D 存储集成电路74HCT157 多路转换双输入集成电路74HCT4046A 压控振荡集成电路74HCT4538D 单稳态集成电路74HCT4538N 触发脉冲集成电路74HCT86D 异或门四2输入集成电路74HCU04 与非门集成电路74LS125 端口功能扩展集成电路74LS373 锁存集成电路74LS393 计数双四位二进制集成电路74LS74双D 触发集成电路78014DFP 系统控制处理集成电路811N 伴音阻容偏置集成电路83D33 压控振荡集成电路87C52 微处理集成电路87CK38N-3584 微处理集成电路87CK38N-3627 微处理集成电路89C52 系统控制处理集成电路89C55 系统控制处理集成电路93C66 电可改写编程只读存储集成电路93LC56 电可改写编程存储集成电路9821K03 系统控制集成电路A1642P 背景歌声消除集成电路A701 红外遥控信号接收集成电路A7950 场频识别集成电路A8772AN 色差信号延迟处理集成电路A9109 功率放大集成电路AAB 电源集成电路ACA650 色度信号解调集成电路ACFP2 色度、亮度信号分离集成电路ACP2371 多伴音、多语言改善集成电路ACVP2205 色度、亮度信号分离集成电路AD1853 立体声数/模转换集成电路AD1858 音频解调集成电路AD722 视频编码集成电路ADC2300E 音频数/模转换集成电路ADC2300J 音频数/模转换集成电路ADC2310E 音频数/模转换集成电路ADV7172 视频编码集成电路ADV7175A 视频编码集成电路AE31201 频率显示集成电路AJ7080 射频调制集成电路AK4321-VF-E1 音频数/模转换集成电路AN1319 双高速电压比较集成电路AN1358S 双运算放大集成电路AN1393 双运算放大集成电路AN1431T 稳压电源集成电路AN1452 音频前置放大集成电路AN1458S 双运算放大集成电路AN206 伴音中频及前置放大集成电路AN222 自动频率控制集成电路AN236 副载波信号处理集成电路AN239Q 图像、伴音中频放大集成电路AN247P 图像中频放大、AGC控制集成电路AN253P 调频/调幅中频放大集成电路AN262 音频前置放大集成电路AN2661NK 视频信号处理集成电路AN2663K 视频信号处理集成电路AN272 音频功率放大集成电路AN2751FAP 视频信号处理集成电路AN281 色度解码集成电路AN2870FC 多功能控制集成电路AN295 行、场扫描信号处理集成电路AN301 伺服控制集成电路AN305 视频自动增益控制集成电路AN306 色度自动相位控制集成电路AN318 直流伺服控制集成电路AN320 频率控制、调谐显示驱动集成电路AN3215K 视频信号处理集成电路AN3215S 视频信号处理集成电路AN3224K 磁头信号记录放大集成电路AN3248NK 亮度信号记录、重放处理集成电路AN331 视频信号处理集成电路AN3311K 磁头信号放大集成电路AN3313 磁头信号放大集成电路AN3321S 录像重放信号处理集成电路AN3331K 磁头信号处理集成电路AN3337NSB 磁头信号放大集成电路AN3380K 磁头信号处理集成电路AN3386NK 磁头信号处理集成电路AN3495K 色度、亮度信号降噪集成电路AN355 伴音中频放大、检波集成电路AN3581S 视频驱动集成电路AN366 调频/调幅中频放大集成电路AN3791 移位控制集成电路AN3792 磁鼓伺服控制接口集成电路AN3795 主轴伺服控制接口集成电路AN3814K 电机驱动集成电路AN4265 音频功率放大集成电路AN4558 运算放大集成电路AN5010 电子选台集成电路AN5011 电子选台集成电路AN5015K 电子选台集成电路AN5020 红外遥控信号接收集成电路AN5025S 红外遥控信号接收集成电路AN5026K 红外遥控信号接收集成电路AN5031 电调谐控制集成电路AN5034 调谐控制集成电路AN5036 调谐控制集成电路AN5043 调谐控制集成电路AN5071 频段转换集成电路AN5095K 电视信号处理集成电路AN5110 图像中频放大集成电路AN5130 图像中频、视频检波放大集成电路AN5138NK 图像、伴音中频放大集成电路AN5156K 电视信号处理集成电路AN5177NK 图像、伴音中频放大集成电路AN5179K 图像、伴音中频放大集成电路AN5183K 中频信号处理集成电路AN5195K 中频、色度、扫描信号处理集成电路AN5215 伴音信号处理集成电路AN5222 伴音中频放大集成电路AN5250 伴音中频放大、鉴频及功率放大集成电路AN5262 音频前置放大集成电路AN5265 音频功率放大集成电路AN5270 音频功率放大集成电路AN5273 双声道音频功率放大集成电路AN5274 双声道音频功率放大集成电路AN5275 中置、3D放大集成电路AN5285K 双声道前置放大集成电路AN5295NK 音频信号切换集成电路AN5312 视频、色度信号处理集成电路AN5313NK 视频、色度信号处理集成电路AN5342 图像水平轮廓校正集成电路AN5342FB 水平清晰度控制集成电路AN5344FBP 色度信号处理集成电路AN5348K 人工智能信号处理集成电路AN5385K 色差信号放大集成电路AN5410 行、场扫描信号处理集成电路AN5421 同步检测集成电路AN5422 行、场扫描信号处理集成电路AN5512 场扫描输出集成电路AN5515 场扫描输出集成电路AN5520 伴音中频放大及鉴频集成电路AN5521 场扫描输出集成电路AN5532 场扫描输出集成电路AN5534 场扫描输出集成电路AN5551 枕形校正集成电路AN5560 场频识别集成电路AN5600K 中频、亮度、色度及扫描信号处理集成电路AN5601K 视频、色度、同步信号处理集成电路AN5607K 视频、色度、行场扫描信号处理集成电路AN5615 视频信号处理集成电路AN5620X 色度信号处理集成电路AN5621 场扫描输出集成电路AN5625 色度信号处理集成电路AN5633K 色度信号处理集成电路AN5635 色度解码集成电路AN5635NS 色度解码集成电路AN5637 色度解码、亮度延迟集成电路AN5650 同步信号分离集成电路AN5682K 基色电子开关切换集成电路AN5693K 视频、色度、行场扫描信号处理集成电路AN5712 图像中频放大、AGC控制集成电路AN5722 图像中频放大、检波集成电路AN5732 伴音中频放大、鉴频集成电路AN5743 音频功率放大集成电路AN5750 行自动频率控制及振荡集成电路AN5757S 行扫描电源电压控制集成电路AN5762 场扫描振荡、输出集成电路AN5764 光栅水平位置控制集成电路AN5765 电源稳压控制集成电路AN5767 同步信号处理集成电路AN5768 光栅倾斜校正控制集成电路AN5769 行、场会聚控制集成电路AN5790N 行扫描信号处理集成电路AN5791 同步脉冲相位与脉宽调整集成电路AN5803 双声道立体声解调集成电路AN5836 双声道前置放大集成电路AN5858K 视频信号控制集成电路AN5862 视频信号控制集成电路AN5862S-E1 视频信号开关控制集成电路AN5870K 模拟信号切换集成电路AN5891K 音频信号处理集成电路AN614 行枕形校正集成电路AN6210 双声道前置放大集成电路AN6306S 亮度信号处理集成电路AN6308 模拟电子开关集成电路AN6327 视频重放信号处理集成电路AN6341N 伺服控制集成电路AN6342N 基准分频集成电路AN6344 伺服控制集成电路AN6345 分频集成电路AN6346N 磁鼓伺服控制集成电路AN6350 磁鼓伺服控制集成电路AN6357N 主轴接口集成电路AN6361N 色度信号处理集成电路AN6367NK 色度信号处理集成电路AN6371S 自动相位控制集成电路AN6387 电机伺服控制集成电路AN6550 卡拉OK音频放大集成电路AN6554 四运算放大集成电路AN6561 双运算放大集成电路AN6562SG 双运算放大集成电路AN6609N 电机驱动集成电路AN6612 电机稳速控制集成电路AN6650 电机速度控制集成电路AN6651 电机速度控制集成电路AN6652 电机稳速控制集成电路AN6875 发光二极管五位显示驱动集成电路AN6877 发光二极管七位显示驱动集成电路AN6884 发光二极管五位显示驱动集成电路AN6886 发光二极管五位显示驱动集成电路AN6888 发光二极管显示驱动集成电路AN6914 双电压比较集成电路AN7085N5 单片录、放音集成电路AN7105 双声道音频功率放大集成电路AN7106K 双声道音频功率放大集成电路AN7108 单片立体声放音集成电路AN710S 单片放音集成电路AN7110E 音频功率放大集成电路AN7114 音频功率放大集成电路AN7116 音频功率放大集成电路AN7118 双声道音频功率放大集成电路AN7118S 双声道音频功率放大集成电路AN7120 音频功率放大集成电路AN7124 双声道音频功率放大集成电路AN7145 双声道音频功率放大集成电路AN7148 双声道音频功率放大集成电路AN7158N 音频功率放大7.5W×2集成电路AN7161N 音频功率放大集成电路AN7164 双声道音频功率放大集成电路AN7171NK 音频功率放大集成电路AN7205 调频/调谐及高频放大集成电路AN7220 调频/调幅中频放大集成电路AN7222 调频/调幅中频放大集成电路AN7223 调频/调幅中频放大集成电路AN7226 调频/调幅中频放大集成电路AN7256 调频/调谐及中频放大集成电路AN7311 双声道前置放大集成电路AN7312 双声道前置放大集成电路AN7315 双声道前置放大集成电路AN7315S 双声道前置放大集成电路AN7320 音频前置放大集成电路AN7396K 双声道前置放大集成电路AN7397K 双声道前置放大集成电路AN7410 调频立体声多路解码集成电路AN7414 调频立体声解码集成电路AN7420N 调频立体声解码集成电路AN7470 调频立体声解码集成电路AN7805 三端电源稳压+5V/1A集成电路AN7806 三端电源稳压+6V/1A集成电路AN7807 三端电源稳压+7V/1A集成电路AN7808 三端电源稳压+8V/1A集成电路AN7809 电源稳压+9V/1A集成电路AN7810 三端电源稳压+10V/1A集成电路AN7812 三端电源稳压+12V/1A集成电路AN7815 三端电源稳压+15V/1A集成电路AN7818 三端电源稳压+18V/1A集成电路AN7820 三端电源稳压+20V/1A集成电路AN7824 三端电源稳压+24V/1A集成电路AN78L05 三端电源稳压+5V/0.1A集成电路AN78L06 三端电源稳压+6V/0.1A集成电路AN78L08 三端电源稳压+8V/0.1A集成电路AN78L09 三端电源稳压+9V/0.1A集成电路AN78L10 三端电源稳压+10V/0.1A集成电路AN78L12 三端电源稳压+12V/0.1A集成电路AN78L15 三端电源稳压+15V/0.1A集成电路AN78L18 三端电源稳压+18V/0.1A集成电路AN78L20 三端电源稳压+20V/0.1A集成电路AN78L24 三端电源稳压+24V/0.1A集成电路AN78M05 三端电源稳压+5V/0.5A集成电路AN78M06 三端电源稳压+6V/0.5A集成电路AN78M08 三端电源稳压+8V/0.5A集成电路AN78M09 三端电源稳压+9V/0.5A集成电路AN78M10 三端电源稳压+10V/0.5A集成电路AN78M12 三端电源稳压+12V/0.5A集成电路AN78M15 三端固定式稳压+15V/0.5A集成电路AN78M18 三端电源稳压+18V/0.5A集成电路AN78M20 三端电源稳压+20V/0.5A集成电路AN78M24 三端电源稳压+24V/0.5A集成电路AN7905 三端电源稳压-5V/1A集成电路AN7906 三端电源稳压-6V/1A集成电路AN7908T 三端电源稳压-8V/1A集成电路AN7909T 三端电源稳压-9V/1A集成电路AN7910T 三端电源稳压-10V/1A集成电路AN7912 三端电源稳压-12V/1A集成电路AN7915 三端电源稳压-15V/1A集成电路AN7918 三端电源稳压-18V/1A集成电路AN7920 三端电源稳压-20V/1A集成电路AN7924 三端电源稳压-24V/1A集成电路AN79L05 三端电源稳压-5V/0.1A集成电路AN79L06 三端电源稳压-6V/0.1A集成电路AN79L08 三端电源稳压-8V/0.1A集成电路AN79L09 三端电源稳压-9V/0.1A集成电路AN79L10 三端电源稳压-10V/0.1A集成电路AN79L12 三端电源稳压-12V/0.1A集成电路AN79L15 三端电源稳压-15V/0.1A集成电路AN79L18 三端电源稳压-18V/0.1A集成电路AN79L20 三端电源稳压-20V/0.1A集成电路AN79L24 三端电源稳压-24V/0.1A集成电路AN79M05 三端电源稳压-5V/0.5A集成电路AN79M06 三端电源稳压-6V/0.5A集成电路AN79M08 三端电源稳压-8V/0.5A集成电路AN79M09 三端电源稳压-9V/0.5A集成电路AN79M10 三端电源稳压-10V/0.5A集成电路AN79M12 三端电源稳压-12V/0.5A集成电路AN79M15 三端电源稳压-15V/0.5A集成电路AN79M18 三端电源稳压-18V/0.5A集成电路AN79M20 三端电源稳压-20V/0.5A集成电路AN79M24 三端电源稳压-24V/0.5A集成电路AN8028 自激式开关电源控制集成电路AN8270K 主轴电机控制集成电路AN8280 电机驱动集成电路AN8290S 主轴电机驱动集成电路AN8355S 条形码扫描接收集成电路AN8370S 光电伺服控制集成电路AN8373S 射频伺服处理集成电路AN8375S 伺服处理集成电路AN8389S-E1 电机驱动集成电路AN8480NSB 主轴电机驱动集成电路AN8481SB-E1 主轴电机驱动集成电路AN8482SB 主轴电机驱动集成电路AN8623FBQ 主轴伺服处理集成电路AN8788FB 电机驱动集成电路AN8802CE1V 伺服处理集成电路AN8813NSBS 主轴电机驱动集成电路AN8819NFB 伺服驱动、直流交换集成电路AN8824FBQ 前置放大集成电路AN8825NFHQ-V 聚焦、循迹误差处理集成电路AN8831SC 视频预视放集成电路AN8832SB-E1 射频放大、伺服处理集成电路AN8837SB-E1 伺服处理集成电路AN89C2051-24PC 微处理集成电路APU2400U 音频信号处理集成电路APU2470 音频信号处理集成电路AS4C14405-60JC 动态随机存储1M×4集成电路AS4C256K16ED-60JC 存储集成电路ASD0204-015 图文控制集成电路ASD0204GF 显示控制集成电路AT24C08 存储集成电路AT24C08A 存储集成电路AT24C256-10CI 码片集成电路AT27C010 电可改写编程只读存储集成电路AT27C020 存储集成电路ATMEL834 存储集成电路AVM-1 视频信号处理厚膜集成电路AVM-2 音频信号处理厚膜集成电路AVSIBCP08 倍压整流切换集成电路B0011A 存储集成电路B1218 电子快门控制集成电路BA033T 三端电源稳压+3.3V集成电路BA10324 四运算放大集成电路BA10393N 双运算放大集成电路BA1102F 杜比降噪处理集成电路BA1106F 杜比降噪处理集成电路BA12ST 电源稳压集成电路BA1310 调频立体声解码集成电路BA1332L 调频立体声解码集成电路BA1350 调频立体声解码集成电路BA1351 调频立体声解码集成电路BA1360 调频立体声解码集成电路BA15218N 双运算放大集成电路BA225 可触发双单稳态振荡集成电路BA302 音频前置放大集成电路BA311 音频前置放大集成电路BA313 音频前置放大集成电路BA3283 单片放音集成电路BA328F 双声道前置放大集成电路BA329 双声道前置放大集成电路BA3304F 录放音前置均衡放大集成电路BA3306 音频、前置放大集成电路BA3312N 话筒信号前置放大集成电路BA3313L 自动音量控制集成电路BA3314 话筒信号前置放大集成电路BA335 自动选曲集成电路BA336 自动选曲集成电路BA340 音频前置放大集成电路BA3402F 双声道前置放大集成电路BA3404F 自返转放音集成电路BA3416BL 双声道前置放大集成电路BA343 双声道前置放大集成电路BA3503F 双声道前置放大集成电路BA3506 单片放音集成电路BA3513FS 单片放音集成电路BA3516 单片放音集成电路BA3706 自动选曲集成电路BA3707 录音带曲间检测集成电路BA3812L 五频段音调补偿集成电路BA3818F 电压比较运放集成电路BA3822LS 双声道五频段显示均衡集成电路BA3828 电子选台预置集成电路BA3880 音频处理集成电路BA401 调频中频放大集成电路BA402 调频中频放大集成电路BA4110 调频中频放大集成电路BA4234L 调频中频放大集成电路BA4402 调频调谐收音集成电路BA4403 调频高频放大、混频、本振集成电路BA4560 双运算放大集成电路BA5096 数字混响集成电路BA5102A 音频功率放大集成电路BA514 音频功率放大集成电路BA516 音频功率放大集成电路BA5208AF 音频功率放大集成电路BA532 音频功率放大集成电路BA534 音频功率放大集成电路BA5406 双声道音频功率放大集成电路BA547 音频功率放大1.5W集成电路BA5912AFP-YE2 电机驱动、倾斜、加载集成电路BA5981FP-E2 聚焦、循迹驱动集成电路BA5983FB 四通道伺服驱动集成电路BA5983FM-E2 电机驱动集成电路BA6104 发光二极管五位显示驱动集成电路BA6107A 电机伺服控制集成电路BA6109 加载电机驱动集成电路BA6125 发光二极管五位显示驱动集成电路BA6137 发光二极管五位显示驱动集成电路BA6191 音频控制集成电路BA6196FP 伺服驱动集成电路BA6208 电机驱动集成电路BA6208D 电机驱动集成电路BA6209 电机驱动集成电路BA6209N 双向驱动电机集成电路BA6209U 电机双向驱动集成电路BA6218 加载电机驱动集成电路BA6219 电机驱动集成电路BA6219B 电机驱动集成电路BA6227 电机稳速控制集成电路BA6238 电机驱动集成电路BA6239 电机双向驱动集成电路BA6239A 电机双向驱动集成电路BA6246M 加载、转盘电机驱动集成电路BA6248 电机驱动集成电路BA6286 电机驱动集成电路BA6287 电机驱动集成电路BA6290 电机驱动集成电路BA6295AFP-E2 加载、倾斜驱动集成电路BA6296FP 电机速度控制集成电路BA6297AFP 伺服驱动集成电路BA6302A 电机伺服控制集成电路BA6305 控制放大集成电路BA6305F 控制放大集成电路BA6308 电子开关切换集成电路BA6321 电机伺服控制集成电路BA6392 伺服驱动集成电路BA6395 主轴电机驱动集成电路BA6396FP 伺服驱动集成电路BA6411 电机驱动集成电路BA6435S 主轴电机驱动集成电路BA6459P1 电机驱动集成电路BA6570FP-E2 聚焦、循迹驱动集成电路BA6664FM 三相主电机驱动集成电路BA6791FP 四通道伺服驱动集成电路BA6796FP 电机驱动集成电路BA6844AFP-E2 三相主电机驱动集成电路BA6849FP 主轴电机驱动集成电路BA689 发光二极管十二位显示驱动集成电路BA6893KE2 直流变换驱动集成电路BA6956AN 加载电机驱动集成电路BA6993 双运算放大集成电路BA7001 音频切换集成电路BA7004 测试信号发生集成电路BA7005AL 射频调制集成电路BA7007 信号检测集成电路BA7021 视频信号选择集成电路BA7024 视频信号测试集成电路BA7025L 信号检测集成电路BA7042 振荡集成电路BA7047 调频检波集成电路BA7048N 包络信号检测集成电路BA7106LS 检测信号控制集成电路BA7180FS 磁头信号放大集成电路BA7212S 磁头信号放大集成电路BA7253S 磁头信号放大集成电路BA7254S 四磁头信号放大集成电路BA7258AS 亮度信号处理集成电路BA7264S 视频信号处理集成电路BA7274S 磁头信号放大集成电路BA7357S 中频放大集成电路BA7604N 电子开关切换集成电路BA7606F 色差信号切换集成电路BA7655 色度信号处理集成电路BA7665FS-E2 视频输出放大集成电路BA7725FS 混响立体声放大集成电路BA7725S 信号压缩及扩展处理集成电路BA7743FS 磁头信号放大集成电路BA7751ALS 音频信号录放处理集成电路BA7752LS 音频信号处理集成电路BA7755 磁头开关集成电路BA7755AF-E2 磁头开关集成电路BA7765AS 音频信号处理集成电路BA7766SA 音频信号处理集成电路BA7767AS 音频信号处理集成电路BA7797F 音频信号处理集成电路BA8420 特技控制处理集成电路BAL6309 场同步信号发生集成电路BH3866AS 音频、色度信号前置放大集成电路BH4001 微处理集成电路BH7331P 音频功率放大集成电路BH7770KS 音频信号处理集成电路BL3207 亮度延时集成电路BL5132 中频放大集成电路BL54573 电子调频波段转换集成电路BL5612 视频放大、色差矩阵集成电路BM5060 微处理集成电路BM5061 字符发生集成电路BM5069 微处理集成电路BN5115 图像中频放大集成电路BOC31F 单片微处理集成电路BP5020 视频电源转换集成电路BT852 视频编码集成电路BT864 视频编码集成电路BT866PQFP 微处理集成电路BU12102 时序信号发生解码集成电路BU2092F 扩展集成电路BU2185F 同步信号处理集成电路BU2285FV 时钟信号发生集成电路BU2820 伺服控制集成电路BU2841FS 视频、蓝背景信号发生集成电路BU2872AK 操作系统控制、屏显驱动集成电路BU3762AF 红外遥控信号发射集成电路BU4053B 电子开关切换集成电路BU5814F 红外遥控信号发射集成电路BU5994F 红外遥控信号发射集成电路BU6198F 屏幕显示集成电路BU9252F 音频延时集成电路BU9252S 数/模转换集成电路BU9253FS 话筒音频混响集成电路BX1303 音频功率放大集成电路BX1409 红外遥控信号接收集成电路BX7506 主轴电机电源控制集成电路C1363CA 红外遥控电子选台集成电路C1490HA 红外遥控信号接收集成电路C187 分配、十进制计数集成电路C301 译码BCD-10段集成电路C68639Y 微处理集成电路C75P036 微处理集成电路CA0002 调幅模拟声解调集成电路CA2004 音频功率放大集成电路CA2006 音频功率放大集成电路CA270AW 视频检波放大集成电路CA3075 调频中频放大集成电路CA3089 调频中频放大集成电路CA3120E 视频信号处理集成电路CA3140 运算放大集成电路CA810 音频功率放大集成电路CA920 行扫描信号处理集成电路CAS126 天线开关集成电路。
电机驱动器IC控制电机运转
电机驱动器IC控制电机运转电机驱动器IC控制电机运转随着科技的不断进步和发展,电机驱动技术在各行各业中起到了至关重要的作用。
而电机驱动器IC作为其中的核心部件,扮演着控制电机运转的关键角色。
本文将介绍电机驱动器IC的工作原理、应用领域及前景,并探讨其对电机运转的影响。
一、电机驱动器IC的工作原理电机驱动器IC是一种集成了电机控制电路的芯片,通过接收外部的控制信号来控制电机的运转。
其主要包括输入端、输出端、电源端及控制逻辑电路。
当输入端接收到外部的指令时,控制逻辑电路会相应地处理这些信号,并将输出信号发送到输出端。
这些输出信号可以通过适配器或传感器接口来实现与电机的连接,从而实现对电机运转的控制。
二、电机驱动器IC的应用领域电机驱动器IC广泛应用于各个领域,如工业自动化、汽车行业、电子设备等。
在工业自动化领域,电机驱动器IC可用于控制传送带、机械臂等设备的运转。
在汽车行业中,电机驱动器IC可用于控制车辆的电动座椅、电动车窗等系统。
在电子设备方面,电机驱动器IC可以用于控制风扇、光驱等电机的运转。
三、电机驱动器IC在电机运转中的影响电机驱动器IC在电机运转中发挥了至关重要的作用,它能够提供稳定的控制信号,并保证电机的正常运转。
其控制精度可以影响到电机的速度、扭矩以及转速的调节范围。
此外,电机驱动器IC的效率也会对电机的运行效果产生影响。
高效率的电机驱动器IC可以降低能耗,提高电机的使用寿命。
因此,在选择电机驱动器IC时,需要根据电机的应用需求和要求来进行选择。
四、电机驱动器IC的发展前景随着电机驱动器IC技术的不断发展,其在各个领域中的应用也将不断扩大。
尤其是在工业自动化领域,电机驱动器IC可以提高生产线自动化程度,提高生产效率和质量。
在新能源汽车领域,电机驱动器IC可以提高电动汽车的续航里程和驾驶性能。
因此,电机驱动器IC有着广阔的发展前景。
综上所述,电机驱动器IC作为控制电机运转的关键部件,其工作原理、应用领域及前景都具有重要意义。
直流无刷马达驱动芯片的工作原理和应用

直流无刷马达驱动芯片的工作原理和应用直流无刷马达(BLDC)是一种通过电子驱动器来控制转子位置和速度的电机。
它采用了无刷电机的特点,即无需使用碳刷和换向器,从而降低了摩擦和能量损耗,并提高了效率和可靠性。
而驱动芯片则是控制BLDC马达的关键组件之一,它负责接收控制信号并将其转化为驱动电流,从而实现对马达的控制。
BLDC马达的工作原理是基于磁场的相互作用。
马达内部有一个固定不动的部分称为定子,以及一个可以旋转的部分称为转子。
定子上分布着若干个线圈,称为绕组,通过通电产生磁场。
转子上则有若干个永磁体,它们的磁极分布使得转子上也存在磁场。
当定子磁场和转子磁场相互作用时,会产生电磁力使得转子开始旋转。
BLDC马达的转子位置和速度的控制是通过电子驱动器实现的,而驱动芯片则是电子驱动器的核心部件。
驱动芯片内部包含了若干个功率开关,它们可以根据控制信号进行开关操作,控制电流的流向和大小。
通过切换不同的功率开关,驱动芯片可以实现对马达转子的精确控制。
驱动芯片还可以根据马达的转子位置和速度进行反馈控制,从而实现闭环控制,提高系统的稳定性和响应速度。
BLDC马达驱动芯片的应用非常广泛。
在工业领域,它常用于机床、自动化生产线以及机器人等设备中,用于驱动各种需要精确控制的运动部件。
在家电领域,它常用于洗衣机、冰箱、空调等家电产品中,用于驱动风扇、压缩机等部件。
在电动车和无人机等交通工具中,BLDC马达驱动芯片也发挥着重要的作用,提供高效、可靠的动力输出。
此外,BLDC马达驱动芯片还广泛应用于医疗设备、电动工具、航空航天等领域。
BLDC马达驱动芯片具有许多优点。
首先,它可以实现高效能的驱动,因为无刷电机的摩擦和能量损耗较小。
其次,它具有较长的使用寿命和较高的可靠性,因为无需使用碳刷和换向器。
此外,BLDC 马达驱动芯片还可以实现精确的转子位置和速度控制,从而提高了系统的控制精度和响应速度。
最后,BLDC马达驱动芯片还可以实现闭环控制,提供更加稳定的输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术讲座・TECHN I CAL L ECTURE
电机控制集成电路的选用
第十三讲 微型电机驱动控制芯片M A X 1749的应用
吴红星,邹继明
(哈尔滨工业大学,黑龙江 哈尔滨 150001)
摘 要:主要介绍小型直流电动机驱动控制芯片M A X 1749的应用,阐述了该芯片的内部结构、工作特点以及其独特的控制功能,给出了该芯片典型应用电路图并加以说明。
关键词:驱动控制;直流电机;过热保护
中图分类号:TM 301.2 文献标识码:C 文章编号:1001-6848(2001)03-0043-02
收稿日期:2001-04-18
1 概 述
小型震动电机被用于许多领域,如手机、传呼机、小型按摩器等。
其电量的来源都是由内部电池提供,电压较低,电流较小。
在上述用途中,共同的要求是此电机的驱动控制器体积小、控制功能全、耗能小、使用方便。
M A X 1749是一种专用的、性能优良的小型震动电机控制及驱动芯片,它可提供恒定的驱动功率,电源电压可以在2.5~6.5V 浮动,可以提供1.5V 到电源电压的输出电压,最大120mA 的输出电流。
2 M A X 1749引脚及功能说明
M A X 1749体积小,具有5个引脚,引脚定义如
下:
第一引脚ON O FF :控制输出端。
当为高电平时,输出端有电压;当为低电平时,输出端关断。
第二引脚GND :芯片地引脚。
电路板要求有较大的焊点,给芯片散热,降低芯片的工作温度。
第三引脚I N :电源输入端。
输入电压2.5
~615V 可调,可与地之间接1ΛF 电容。
第四引脚OU T :芯片输出端。
输出电压在115V 到输入电源电压可调,最大输出电流可达120mA ,可与地之间接1ΛF 电容。
第五引脚SET :输出电压反馈输入端。
可外接115V 输出电压,也可外接电阻调节控制输出电压。
M A X 1749性能优异,具有输出电压可调、低功耗、过热保护、过流保护、电源短路保护、较低
M O SFET 关开通
截止电流等特点。
其内部集成了M O SFET 功率管、
温度传感器、比较放大器、迅速切断电源电路及逻辑开关等,结构见图1。
115V 参考电压与内部运算放大器的负端相连,它和运放另一个输入端(电压反馈信号)进行比较,差值说明了输出电压和调节电压的差异,并提供有关信号给M O SFET 驱动电路,适当地调整输出电流。
当反馈电压低于参考电压时,驱动电路根据情况改变驱动信号,而增大输出电流和电压;相反,当反馈电压高于参考电压时,驱动电路根据情况改变驱动信号,减小输出电流和电压,使输出电流、电压达到稳定。
图1 M A X 1749内部结构示意图
M A X 1749内部有过热保护功能,它限定了总热损耗功率,当节温超过170℃时,温度传感器给出
开关信号给逻辑开关电路,关闭M O SFET 功率管,使芯片冷却。
当芯片的温度冷却到20℃时,温度传感器又将给出信号,使电路正常工作。
当电源反向
—
34—电机控制集成电路的选用 第十三讲 微型电机驱动控制芯片M A X 1749
的应用 吴红星 邹继明
时,由于内部寄生二极管,其反向电流限定为1mA ,这样对电池的过热、过流起到保护作用。
工作环境为:
(1)输入电压范围:-7~+7V (2)电压反馈范围:-0.3~+7V (3)输出电压范围:-7~+7V (4)芯片工作温度范围:-40~+85℃
(5)存储温度范围:-65~+150℃(6)杂散损耗(温度70℃):571mW
3 M A X 1749典型应用
M A X 1749是一种低功耗小型电机驱动控制芯
片,其可以驱动手机、传呼机及小型按摩器中直流电机。
其典型应用如图2所示。
电池电压2.5~6.5V。
图2 M A X 1749典型应用电路图
如果事先想把输出电压调整为115V ,可以把输出端直接连接到SET 端,这样输出电压就固定为115V 。
如果想要得到其它的输出电压(215V 到输入电压之间),可以利用两个电阻串联,并取反馈电压值到SET 端,见图2。
芯片输出电压为:
V OU T =V SET (1+R 1 R 2)(1)为了使得该电路杂散较小(不允许输入高频电
源),从外部引入的反馈信号电流应小于10ΛA ,这样
R 2的电阻值可选择为100k 8。
这样根据不同的输出电压可以得到R 1:
R 1=R 2(V OU T
V SET
-1)(2)
M A X 1749内部有过流保护器,其可以监测和
控制输出电流,限制输出电流在280mA 以下。
当
ON O FF 端为T TL 高电平时,直流电机给电运行,当为低电平时,芯片关闭电源,消耗电流大约为10nA 。
当输入电压V I N 大于515V 时,通过电阻得到的外部反馈电流应稍大,为30nA 。
在应用中,ON O FF 由低电平变为高电平时,输出电流为较大值,直到输出电压达到预先设定的电压值,此时电流减小保持电机以一定的转速运行。
当ON O FF 由高电平变为低电平时,电路关闭输出电源,由于电机的旋转惯性产生感应电势,电压减到零有一个过程,如图3所示。
在图2电路中,为增强电路的稳定性及暂态响应,加入了1ΛF 的输入电容和1ΛF 输出电容。
当输入电源变化较大、输出暂态响应要求较高时,可以考虑输入电容值取
10ΛF ,输出电容值取10ΛF 。
图3 ON O FF 波形对输出电流、
电压波形的影响(待续)
作者简介:吴红星1975—),男,助研,主要从事电机驱动及电动车驱动控制系统的研究。
●声 明●
为了实现科技期刊编辑、出版发行的电子化,推进科技信息交流的网络化进程,我刊已入网“万方数据——数字化期刊群”,向本刊投稿并录用的文章,将一律由编辑部统一纳入“万方数据——数字化期刊群”,进
入因特网提供信息服务。
凡有不同意者,请另投它刊。
本刊所付稿酬包含刊物内容上网服务报酬,不再另付。
“万方数据——数字化期刊群”是国家“九五”重点科技攻关项目。
本刊全文内容按照统一格式制作,读者可上网查询浏览本刊内容,并征订本刊。
《微电机》编辑部
—
44—微电机 2001年 第
34卷 第3期(总第120期)。