YASKAWA717使用说明
YASKAWA CP-717培训课件
CP-317, 316, 9200SH Maintenance Course
PPT学习交流
1
CP-717 Start-up
Group Folder Group Folder Order Folder Order Folder PLC Folder CPU Folder
Create folders.
• Program and Drawing Concepts
– Start Process Drawing, High-speed・Low-speed Process Drawing, Interruption Process Drawing
– Parent Drawing, Child Drawing, Grandchild Drawing
Grandchild
DWG. 2
FunctPioPnT1学习交流 Max. 64
Max. 99
7
Function
• Standard programs are called Functions. Anyone can retrieve at anytime.
• System Standard Functions are programmed
Child Drawing 3 Process Reference
Child DWG. 1
Grandchild DWG. 1 Process
Grandchild DWG. 2 Process
Child DWG. 2
Child DWG. 3
Max. 99
Grandchild
DWG. 1
Function 1. Process Reference
YASKAWA伺服参数设定说明

YASKAWA伺服参数设定说明YASKAWA是一家全球领先的伺服机器人和工业自动化解决方案供应商,其产品广泛应用于各种制造业领域。
为了实现最佳的运动控制性能,YASKAWA伺服系统提供了各种参数设置选项,以满足不同应用需求。
以下是YASKAWA伺服参数设定的详细说明。
1.控制方式设置:YASKAWA伺服系统提供了位置控制、速度控制和力矩控制等不同的控制方式。
根据实际应用需求,在参数设置中选择适当的控制方式。
2.增益设定:伺服系统的增益参数用于控制系统的稳定性和响应速度。
通过增益设定,可以调整伺服系统的动态响应性能。
通常,根据应用需求进行增益调整,以达到最佳的系统性能。
3.比例系数(Kp)设置:比例系数是伺服系统PID控制器的比例增益。
通过调整比例系数,可以控制系统的稳定性和快速响应性能。
通常,较高的比例系数能够快速响应外部扰动,但过高的值可能导致系统震荡。
4.积分系数(Ki)设置:积分系数是伺服系统PID控制器的积分增益。
通过调整积分系数,可以提高系统对于稳态误差的抑制能力。
通常,较大的积分系数可以减小稳态误差,但过大的值可能导致系统不稳定。
5.微分系数(Kd)设置:微分系数是伺服系统PID控制器的微分增益。
通过调整微分系数,可以控制系统的抗振性能。
较大的微分系数可以减小系统的震荡,但过大的值可能导致系统过于敏感。
6.速度限制设置:伺服系统的速度限制参数用于限制系统的最大速度。
通过设置速度限制,可以保证系统在安全范围内进行运动。
根据机器的设计和应用需求,设定适当的速度限制值。
7.力矩限制设置:伺服系统的力矩限制参数用于限制系统的最大力矩输出。
通过设置力矩限制,可以防止系统超载。
根据机器的设计和应用需求,设定适当的力矩限制值。
8.过载保护设置:YASKAWA伺服系统提供了多种过载保护选项,包括过负荷保护、过电流保护和过热保护等。
通过设置适当的过载保护参数,可以保证系统的安全运行。
9.伺服滤波器设置:伺服滤波器参数用于平滑伺服系统的输出信号。
培训三:设备所用717基本编程教材
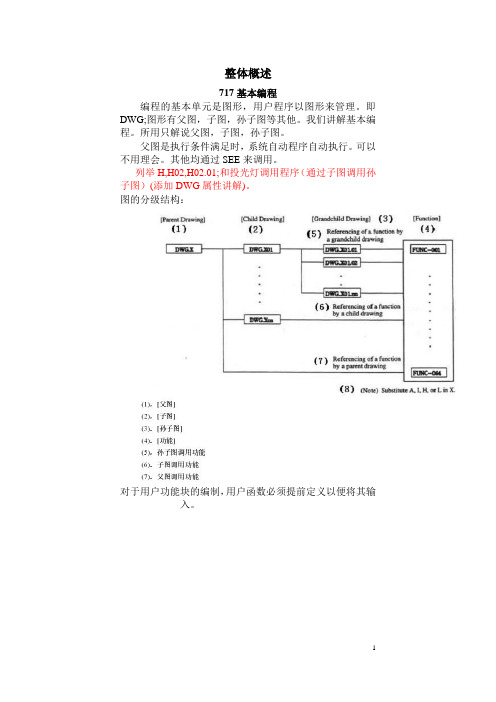
整体概述717基本编程编程的基本单元是图形,用户程序以图形来管理。
即DWG;图形有父图,子图,孙子图等其他。
我们讲解基本编程。
所用只解说父图,子图,孙子图。
父图是执行条件满足时,系统自动程序自动执行。
可以不用理会。
其他均通过SEE来调用。
列举H,H02,H02.01;和投光灯调用程序(通过子图调用孙子图)(添加DWG属性讲解)。
图的分级结构:对于用户功能块的编制,用户函数必须提前定义以便将其输入。
样例程序1.选择FSTART命令。
2.输入函数名。
显示函数的表达式。
以下对输入、地址输入及输出区进行编程。
每一区的输入举例用样例程序进行解释。
输入区对比特型数据(由B-V AL定义)的输入区如下进行编程。
1.输入N.O.触点命令。
2.选择FIN命令。
函数的输入参数与N.O.触点命令相关联对整数型数据(由I-V AL定义)、倍长整数型数据(由L-V AL定义)或实数型数据(由F-V AL定义)的输入区如下进行编程。
1.输入入口命令。
2.选择FIN命令。
函数的输入参数与入口命令相关联。
对整数型数据(由I-REG定义)、倍长整数型数据(由L-REG定义)或实数型数据(由F-REG定义)的输入区如下进行编程。
1.选择FIN命令。
函数和寄存器号(或常数)的输入参数将相互关联。
2.输入寄存器号(或常数)。
●地址输入区地址输入区的编程如下。
1.选择FIN命令。
2.输入寄存器号。
●输出区1.选择FOUT命令。
函数和线圈命令的输出参数将相互关联。
717编程的数据类型为:存储器标示:YASKAWA(安川)PLC寄存器类型及表示字地址(WORD)位地址(BIT) 功能及含义MWnnnnn MBnnnnnn 程序寄存器,MBnnnnnn对应MWnnnnn的一位MWnnnnn及MBnnnnnn在全部程序中通用DWnnnnn DBnnnnnn 子程序寄存器,DBnnnnnn对应DWnnnnn的一位DWnnnnn及DBnnnnnn只在子程序中有效Iwnnnnn IBnnnnnn 输入寄存器,IBnnnnnn对应IWnnnnn的一位IWnnnnn及IBnnnnnn在全部程序中通用Ownnnnn OBnnnnnn 输出寄存器,OBnnnnnn对应OWnnnnn的一位OWnnnnn及OBnnnnnn在全部程序中通用SWnnnnn SBnnnnnn 系统寄存器,SBnnnnnn及SWnnnnn为系统专用寄存器,有特定含义,用户只可利用,不可定义.MB003606 MB00360F1.指针标识2.内存地址3.寄存器区4.图3.1 指针标识在图3.1中,MA00100表示MW00100的内存地址nn。
安川CP717PLC指令说明
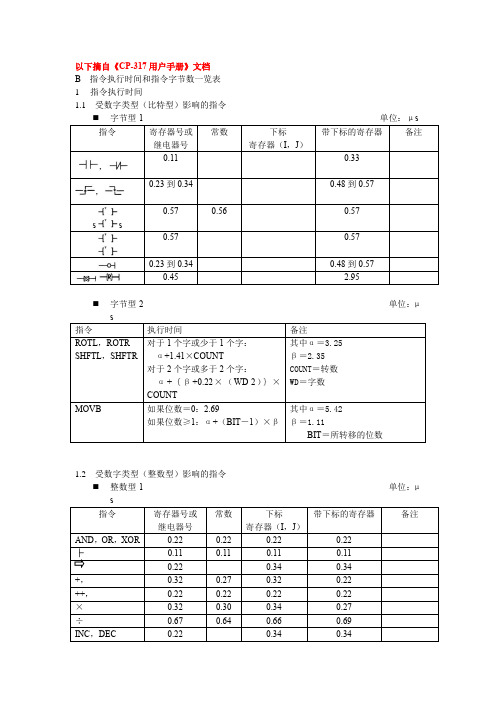
以下摘自《CP-317用户手册》文档 B 指令执行时间和指令字节数一览表 1 指令执行时间
1.1 受数字类型(比特型)影响的指令
,
,
0.23 s
s 0.23
⏹ 字节型-2 单位:μ
1.2 受数字类型(整数型)影响的指令
⏹ 整数型-1 单位:μ
A-15 整数型-2单位:μ
A-16
1.3受数字类型(实数型)影响的指令
实数型-1单位:μs
的情况。
A-17 实数型-2单位:μ
A-18
SFCSTEP 0.11
0.21
,
(触点转换)
+(计时器转换)0.72
A-19
(续)*1:备注栏的内容涉及的是目标字节数。
*2:如果指令附有[ ],则在目标字节数上加4或5个字节。
A-20
(续)
INS, OUTS 2
1
,
1
,
2
s s
1
1
*1:备注栏的内容涉及的是目标字节数。
*2:如果指令附有[ ],则在目标字节数上加4或5个字节。
A-21
(续)*1:备注栏的内容涉及的是目标字节数。
*2:如果指令附有[ ],则在目标字节数上加4或5个字节。
A-22
*1:备注栏的内容涉及的是目标字节数。
*2:如果指令附有[ ],则在目标字节数上加4或5个字节。
A-23
SFC 1
,,+ 1
ABOX,SBOX 1
(注)1:备注栏的内容涉及的是目标字节数。
2:如果指令附有[ ],则在目标字节数上加4或5个字节。
安川PLC通讯设定、安川CP-717注释翻译及以太网通讯、218通讯联接设定
选择218通讯
默认值即可
点击详细之 后,请看下 面图示
IP地址是 笔记本电 脑的地址
双击本地连接之后出现以下画面
双击本地连接2时 出现左面对话框, 双击(TCP/IP)出 现下面对话框
设置IP地址及子网掩 码,该IP地址就是通 讯框所要填写的地址
通讯框设置好之后,再设置PLC的 通讯地址,右键N01S01点击属性之 后,出现下面通讯框。
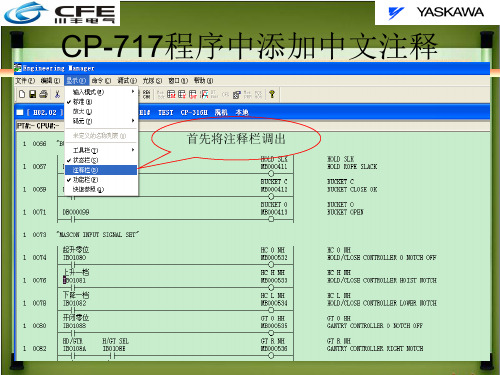
CP-717程序中添加中文注释
首先将注释栏调出
调出注释栏之后显示如下, 将光标点到IB01081处, 显示如图
第一个栏最多填写4个 汉字(直接写注释)
第二个栏最多填写24个汉字, 此栏是对前面栏的详细说明 (直接写注释)
设置通讯工程框
如果没有设置以太网通讯, 先选择逻辑端口2(任意), 点击菜单栏文件,选择设定 弹出以下对话框。
点击网络一栏,设 置逻辑端口及IP地 址。
该IP地址是PLC 的地址,后面四 台都是一样的
CP717使用说明

Motion sup Program 表示副程式
資料個別傳送3
按Detaile時出現視窗 MotionMainProgra mDetailSet
資料個別傳送4
選擇傳送程式
是否 傳送
傳送完畢關閉視窗
正在傳 送中
資料個別傳送5
選擇Individual File Transfer表示個別資料 傳送
F7功能鍵指定結束的行數
表示停止
F8功能鍵SP-BP之間的行數指令
F9功能鍵表示暫停
資料拷貝作業程式
修改名稱後按OK鍵.注:有 連線存在機器中無連線則 儲存在電腦.
按FILE選擇SAVE NEW FILE表示另存新檔 如程式內容相同但圈數不一樣等以拷貝的形式.
輸入產品名稱
出現對話框在 Title中輸入產品 名稱後按set確定
建立連線系統1 即電腦與機器連接
在controller name 建入機器編號
當對話框出現 Controller
folder時點擊
當對話框出現 Controller type
為機器 PLC系統
建立連線系統2
輸入機 臺編號
選擇PLC種類
建立連線系統3
點擊OK連線系 統編輯完畢.
注意:
此時畫面上任何 資料不可修改!!!
2
MPM為主
程式
檔.MPS為
副程式檔.
1
MPM251
為進氣壓程
式.
MPM252
為回原點程
式此兩項程 式不可刪除
3
4
或修改.
MPM001---進入1號程式
雙擊MPM001出現Engineering Manager(工程管理程式)
安川CP717培训教材
目录CP-717简介PLC程序内寄存器的分配规律 CP-717程序中常用命令和语句 PLC程序的结构程序和参数的上传与下载程序的强制与编辑程序中某些特殊点的查找方法CP-717简介CP-717软件是CP-316系列、CP-317、CP-916A、RIO-2000等控制器的软件操作平台。
软件的功能强大,操作简便。
在联机时可以进行程序的监控,配置文件,梯形图的修改,上传下载PLC程序和变频器参数,可以避免手动输入的误操作。
同时也可以用备份在编辑器内的程序或变频器参数与机上相对设备的程序或参数进行比较,以便分析和排查故障时进行对比。
脱机时可以进行软件的编辑,检查,注释的修改,变频器文件的建立,设定变频器参数PLC程序内寄存器的分配规律IW**** 输入寄存器(字)采集从I/O模块,模拟量输入模块等输入设备的字状态IB**** 输入寄存器(位)与上述字功能一致,它表示IW****字中的某一位OW**** 输出寄存器(字)将运算结果送到输出模块,模拟量模块及各通讯接口地址中去OB**** 输出寄存器(位)功能同上,一般表示输出字的一位,用于驱动数字量输出,在应用中驱动继电器等小功率执行元件MW**** 中间结果寄存器(字)用于存储PLC运算中间结果,或作为中间结果的地址MB**** 中间结果寄存器(位)用于存储中间逻辑运算结果的位状态DW****子程序内中间结果寄存器(字)功能与MW**** 相同,区别在于MW**** 在整个程序段内有效,而DW****只在本子程序段内有效,在不同的子程序段内可以重复定义使用DB****子程序内中间结果寄存器(位)功能与IB****或OB****相同。
SW**** 系统内部专用寄存器(字)用于系统内部已定义的各种状态,可记录PLC各种故障,实现定义好的各种功能,只可在程序中调用,不可定义SB**** 用于存储PLC内定义好的一些位功能状态C P 717程序中常用命令和语句On Delay[10ms]Of Delay[10ms]比较语句On Pulse有条件置“0”数据的传输条件语句调用子程序程序“段”注释整数数值限幅程序“行”注释功能块程序结束语句PLC程序的结构高速扫描程序(H程序):程序扫描时间可以定义最小10ms,用于变频器数据采集分析,变频器驱动信号给定及起升、小车、大车、俯仰机构的互锁信号。
安川程序操作指南
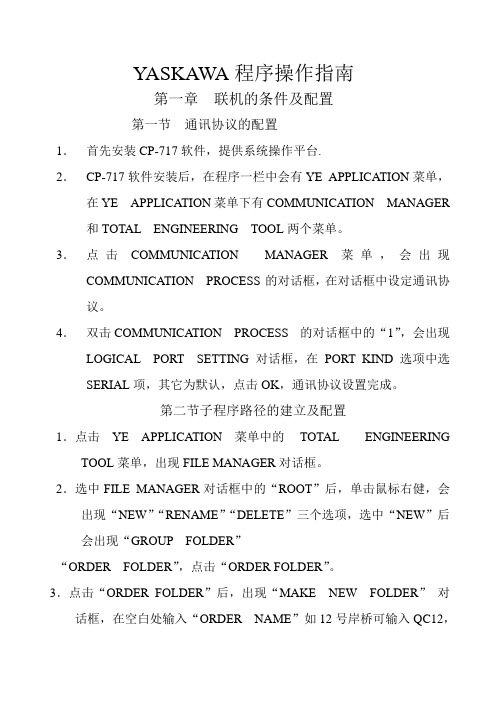
YASKAWA程序操作指南第一章联机的条件及配置第一节通讯协议的配置1.首先安装CP-717软件,提供系统操作平台.2.CP-717软件安装后,在程序一栏中会有YE APPLICATION菜单,在YE APPLICATION菜单下有COMMUNICATION MANAGER和TOTAL ENGINEERING TOOL两个菜单。
3.点击COMMUNICATION MANAGER菜单,会出现COMMUNICATION PROCESS 的对话框,在对话框中设定通讯协议。
4.双击COMMUNICATION PROCESS 的对话框中的“1”,会出现LOGICAL PORT SETTING对话框,在PORT KIND选项中选SERIAL项,其它为默认,点击OK,通讯协议设置完成。
第二节子程序路径的建立及配置1.点击YE APPLICATION 菜单中的TOTAL ENGINEERING TOOL菜单,出现FILE MANAGER对话框。
2.选中FILE MANAGER对话框中的“ROOT”后,单击鼠标右健,会出现“NEW”“RENAME”“DELETE”三个选项,选中“NEW”后会出现“GROUP FOLDER”“ORDER FOLDER”,点击“ORDER FOLDER”。
3.点击“ORDER FOLDER”后,出现“MAKE NEW FOLDER”对话框,在空白处输入“ORDER NAME”如12号岸桥可输入QC12,然后回车。
4.选中QC12单击鼠标右健,会弹出“CREATE NEW FOLDER”“RENAME”“DELETE”三个选项,选中“CREATE NEW FOLDER”后会弹出“CONTROLLER FOLDER”单击“CONTROLLER FOLDER”。
5.单击“CONTROLLER FOLDER”,弹出“CONTROLLER CONFIGARATION”对话框,在“INFORMATION”目录下第一个“CONTROLLER”框中一般根据此控制器所处的网络号和站号编名如“N01S01”即一号网络一号站;“COMMENT”可不填写;第二个“CONTROLLER”为控制器的类型如“CP-317”“CP-316H”“CP-916A”“RIO2000”等等,一般“N01S01”的控制器的类型QC选“CP-317”,RTG选“CP-316H”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安川PLC控制软件CP-717内部功能完善,通讯及运算功能强大,能对PLC及变频器实施精密控制.
1)高速扫描程序结构
N01S01中的高速扫描程序主要实现对起升机构,大车机构,小车机构,俯仰机构的运行控制,位置检测及对各机构变频器实施精密控制,并实时采集变频器的各项参数,进行运算判断保证各机构安全,可靠的运行.
215通讯
RIO-2000单元
I/O模块I
I/O模块I
I/O模块I
I/O模块I
I/O模块I
I/O模块I
216通讯
大车PG小车PG
大车PG
起升PG
6)故障查找流程
联机打开程序的步骤
程序寄存器,MBnnnnnn对应MWnnnnn的一位
MWnnnnn及MBnnnnnn在全部程序中通用
DWnnnnn
DBnnnnnn
子程序寄存器,DBnnnnnn对应DWnnnnn的一位
DWnnnnn及DBnnnnnn只在子程序中有效
Iwnnnnn
IBnnnnnn
输入寄存器,IBnnnnnn对应IWnnnnn的一位
IWnnnnn及IBnnnnnn在全部程序中通用
Ownnnnn
OBnnnnnn
输出寄存器,OBnnnnnn对应OWnnnnn的一位
OWnnnnn及OBnnnnnn在全部程序中通用
SWnnnnn
SBnnnnnn
系统寄存器,SBnnnnnn及SWnnnnn为系统专用寄存器,有特定含义,用户只可利用,不可定义.
MB003
3
4
5
6
7
8
9
A
B
C
D
E
F
MW00360
5)电控系统构成示意图
VS-616G5
起升/大车1#
变频器
VS-616G5
大车2#
变频器
VS-616G5
小车变频器
RIO-2000单元
I/O模块I
I/O模块I
I/O模块I
I/O模块I
I/O模块I
I/O模块I
CP316H
主CPU
2)低速扫描程序结构
N01S01中的低速扫描程序主要进行各辅助机构的控制(如大车的转向机构,倾转机构,吊具机构等)及故障信号的处理
3)程序的逻辑部分结构形式画面
4)程序的运算及数据处理结构形式画面
YASKAWA(安川)PLC寄存器类型及表示
字地址(WORD)
位地址(BIT)
功能及含义
MWnnnnn
MBnnnnnn