Acoustic Echo Cancellation for Noisy Signals
AEC回声原理及消除
AEC Automatic Echo Cancellation 自动回音消除“回音”是通讯产品及配件在实际使用的过程中,时常遇到的问题。
客观地说,无论模拟式通讯、还是数字式通讯,在使用过程中,都一定存在回音的现象。
因此,回音消除器产品成为了通讯业至今不息的论题。
在设计一款“回音消除”产品、或者模块化电路的时候,设计人员首先要了解“回音”产生的机理,而后从实际的条件入手,选择适合的产品方案。
以下所讨论的,仅限于视频会议行业常规的使用条件下的产品。
回音的产生回音的产生,最早是人们在一个空旷的峡谷中喊话,会多次听到自己的声音,这种现象是“声学回音”,指声源产生后,声波在某个物体的表面得到发射,形成“二次声源”,如果声波得到多次的反射,就会形成在峡谷中喊话的效果了。
中国北京天坛回音壁就是人为地采用了这种回音原理,建造出的历史景点。
在电话出现后,人们又发现,在通话过程中,会在一定的短暂延时之后,听到自己说的话。
这种回音现象,我们称之为“网络回音”,特别是采用两线式的电话系统,在两条铜线上要承载双向的语音信号,在电波延时后,就会出现“二次信号”了。
通讯中的回音,如果造成“多谐波”,就会发生“自激啸叫”,影响通讯效果。
但是在电话通讯中,一定水平的“网络回音”是有利于通话双方的沟通感觉。
目前的视频会议行业中所讨论的回音,同时包含了电路的信号延时产生的侧音和会场环境造成的声学回音两种因素,主要是由于声学回音Acoustic Echo造成,在下图中,解释了产生的原因:在通讯中,远端用户和本端用户形成了通讯的环路(Loop),一个双向的通信线路组成了一个封闭的环路。
图中所示:远端用户的语音信号经过话筒的采集后,以数据信号的方式通过通信线路传递到本端设备,通过扬声器播放出来;播放出来的声音和本端用户讲话的声音同时进入话筒,形成混合信号,再通过通信线路传递给远端用户。
经过这样的过程,远端用户从其扬声器中听到的声音信号包括了本端用户讲话的声音和自己讲话的声音,即形成“回音”。
回声消除技术介绍
回声消除技术介绍回声是指声音在空间中反射、折射和干扰后产生的重复声波,它会对音频质量和清晰度造成负面影响。
为了消除回声,需要使用专门的回声消除技术。
本文将介绍一些常见的回声消除技术。
1. 自适应滤波器(Adaptive Filtering):自适应滤波器是一种基于数字信号处理的回声消除技术。
它通过计算和消除回音信号与原始信号之间的差异来工作。
自适应滤波器根据回声信号的特征调整其滤波器参数,从而逐渐减少回音的影响。
它比较适用于单声道音频信号。
2. 双向声学回声消除(Acoustic Echo Cancellation, AEC):3. 时域回声抵消(Time Domain Echo Cancellation):时域回声抵消是一种常见的回声消除技术,通过在回音信号和原始信号之间进行延迟补偿来实现。
它根据回声的延迟时间和振幅对原始信号进行相应的调整,从而在接收端消除回响声。
4. 频域回声抵消(Frequency Domain Echo Cancellation):频域回声抵消技术主要用于回音时间较长的场景,通过将输入信号分解为多个频率成分,然后根据回音信号的频率特征对其进行抵消。
这种方法对频率响应线性变化较小的信号效果更好。
5. 混响消除(Reverberation Cancellation):混响消除技术主要用于去除经过多次反射和折射后产生的混响声。
它通过分析和模拟空间中的反射路径来消除原始信号中的混响分量。
混响消除可以提高音频的清晰度和可听性。
6. 环路抑制(Echo Loop Suppression):环路抑制技术主要用于消除回声引起的闭环振荡问题。
它通过检测和抑制回声传输路径中的闭环反馈,从而避免声音在回音和原始信号之间循环放大。
总结:。
aec算法优劣评价方法

AEC算法优劣评价方法1. 简介AEC(Acoustic Echo Cancellation)算法是一种用于消除语音通信中的回声的技术。
在语音通信中,由于麦克风和扬声器之间的耦合,会产生回声,降低语音质量和通信效果。
AEC算法的目标是通过分析输入信号和输出信号之间的关系,预测和消除回声,从而提高语音通信的质量。
2. AEC算法的优势AEC算法相比其他回声消除技术具有以下优势:2.1 实时性AEC算法能够在实时通信中实时消除回声,不会引入延迟,保证通信的即时性。
这对于实时语音通信应用非常重要,比如电话会议、网络电话等。
2.2 自适应性AEC算法能够自适应不同环境下的回声特性。
它通过分析输入信号和输出信号之间的关系,自动调整参数,适应不同的回声环境。
这使得AEC算法在不同场景下都能够有效地消除回声。
2.3 高消除性能AEC算法能够有效地消除回声,提高语音通信的质量。
它通过预测回声信号,并将其从输出信号中减去,从而降低回声对通信质量的影响。
AEC算法在实际应用中已经取得了很好的效果,被广泛应用于语音通信系统中。
3. AEC算法的劣势尽管AEC算法具有很多优势,但也存在一些劣势:3.1 需要较高的计算资源AEC算法需要进行复杂的信号处理和预测计算,对计算资源要求较高。
特别是在实时通信中,需要在较短的时间内完成回声消除,对硬件性能提出了一定的要求。
3.2 对初始条件敏感AEC算法对初始条件较为敏感,需要进行适当的初始化和训练。
如果初始条件选择不当或者环境变化较大,可能会导致AEC算法的性能下降,甚至无法正常工作。
3.3 无法完全消除回声尽管AEC算法能够有效地消除回声,但由于回声信号与原始信号的相关性较高,无法完全消除回声。
在极端情况下,回声可能会被错误地当作语音信号处理,导致语音质量下降。
4. AEC算法的评价方法为了评价AEC算法的优劣,可以采用以下方法:4.1 信号质量评估通过对AEC算法处理后的语音信号进行主观和客观的评估,来评估其语音质量。
声学回声消除技术(AEC)在会议扩声系统的应用

声学回声消除技术(AEC)在会议扩声系统的应用潘晓东【摘要】从分析声学回声在电话会议的互联互通会议中的形成过程出发,解析了何为声反馈、回声及声学回声.详细讲解了声学回声的形成原理、过程以及危害所在,并提出在电话会议室会议扩声系统中消除声学回声的技术方法.【期刊名称】《电声技术》【年(卷),期】2012(036)002【总页数】6页(P10-14,24)【关键词】声反馈;回声;声学回声;声学回声消除;电话会议系统【作者】潘晓东【作者单位】安恒利(国际)有限公司,广东广州510100【正文语种】中文【中图分类】TB541 声反馈扩声系统的特点是声源和放声用的扬声器处于同一地区,在接收人语音信号的同时向听众播放。
因为传声器和扬声器处在同一区域内,所以经过放大并由扬声器辐射的声音会反馈到传声器,因而引起畸变或啸叫[1]。
声反馈(acoustical feedback)主要指室内同时使用传声器和扬声器,由扬声器到传声器直接和间接地传输。
扩声的一个特例,即声反馈系数为零就是放音系统,系统的传声增益大于0时,系统处于正反馈工作状态,系统失控。
因此为保证扩声系统正常工作,扩声系统应该远离自振点,一般至少有6 dB的稳定度,即系统的传声增益为-6 dB。
因此要减少啸叫就需使系统的频率传输特性平直,减少再生混响的干扰。
在国家多项扩声系统指标要求内,都要求系统的主频段内的频率传输特性在±4 dB 以内,实际包括了电声系统的频率传输特性和房间的频率传输特性;一般使用的传声器的频率传输特性在±3 dB以内,因此包括传声器在内的扩声系统的整个主频段频率传输特性一般控制在±4 dB以内,以减少产生啸叫的机会。
回声会使房间的频率传输特性变坏,同时也会产生更大的再生混响干扰。
由于扬声器的再生信号在传声器上引起声压逐渐降低的现象和室内混响过程类似,所以称为再生混响。
因为声反馈系数的频率特性不均匀度很大,所以各频率的再生混响时间的变化也非常大,它不像标准混响那样有利于音质的改进而是干扰了扩声系统的正常工作。
(Ebook)Acoustic Echo Cancellation using Adaptive LMS

ABSTRACTIn an increasingly noisy society,methods of reducing noise are becoming more important.Noise,or unwanted sound,may be reduced in an environment by two basic means:passive noise control and active noise control (ANC).Active noise control is a method of reducing noise by canceling a sound wave with an inverted copy of itself.This process works best in a simple environment:one in which the wavelength of the noise is long in relation to the dimensions of the space.ANC has been most successful in reducing noise in ducts and headphones (essentially one dimensional problems).This project centered around applying ANC techniques to reducing reverberatory echoes in collected data.The models built during this study are,in effect, one dimensional spaces were ANC is applied.1.INTRODUCTIONIn the Electrical Engineering building at Mississippi State University,Simrall,there are three large,four story stairwells.These stairwells are extremely reverberatory, and sustain a low frequency noise for long periods of time(~10seconds).The reverberation is,in fact,so bothersome that conversations must be suspended while traversing the halls because the conversation quickly deteriorates.The frequencies amplified by the room are mostly at the lower end of the audio spectrum,as would be expected from a large cavernous room.There are several ways that the reverberating action of a large space can be reduced.One option is to install baffles and other types of physical damping to the room. Using physical methods is most appropriate for high frequencies since the size and weight requirements of low frequency baffles tend to outweigh their usefulness. For example,an ideal location for global ANC is airplane cabins where the noise is very bothersome and in some instances medically harmful.In this case,the weight of the necessary baffles would severely restrict the capabilities of the airplane.This project focused on echo cancellation,starting with the elimination of a computer-simulated reverberation. Thisfirst stage consisted of the development of versatile echo cancellation code using the least mean square adaptive filtering algorithm described below.Adaptive filtering examines an input,attempts to cancel it,and adjusts the filter coefficients of an FIR filter to compensate for the error.This code was tested by inputting artificial sound files with simple impulse responses,and canceling the echo through adaptive filtering techniques.Upon completion of the simulated echo cancellation phase,the parameters were modified to handle real signals recorded in the Simrall stairwell. These modifications consisted mainly of increasing the tap length and reducing the error correction step size.Acoustic Echo Cancellation in a Reverberatory Chamber Using an AdaptiveLeast Means Square AlgorithmVincent Allen, Mark E Henderson, Erik S Wheeler, and John WilliamsThe Echo Cancellation GroupDepartment of Electrical and Computer EngineeringMississippi State UniversityMississippi State, Mississippi 39762{allen, henders, wheeler}@ and {SPwillia@}Generation ofEcho ReplicaSpeakerMicrophoneThe canceller was not tested in a real time experiments this semester due to time constraints.But if it were,the reduction in noise would only be evident within a foot or two of the speaker,depending on the wavelength of the signal.This is due to the single input-single output,one-dimensional filter we are designing.Since the signal to be canceled will not follow the same path as the canceling signal,the160-200degree phase difference required for cancellation will only occur at particular locations in the room.It should be noted that,due to the varying phase difference,the signal will also be amplified in some areas.This problem could be controlled by the use of additional sensors and speakers.A major difference between active acoustic echo cancellation and the echo canceller currently in wide-spread use is that the echo canceller has the reference signal at hand,thus making an echo estimate a relatively trivial task,namely one of simple convolution,which can then be used to filter out the unwanted echoes.To make the link between these two it is necessary to develop the inverse filter corresponding to the FIR filter developed by the algorithm.Such a filter could be used to continuously filter incoming data without knowing the reference signal,but this step in the procedure is not possible given the problem constraints which are strictly enforced by Father Time.2.TECHNOLOGY TODAY2.1.Hardware/Software:Since there are many different applications for echo cancellation, there are naturally many different types of hardware and software available to the DSP engineer. Most of the echo cancellation software and hardware developed thus far has been developed primarily for telecommunications.Echo cancellation on the phone lines has been necessary for many years,due to the relatively long signal paths introduced by satellite and long terrestrial connections,to provide quality service. Other uses for echo cancellation technology include new and rising fields such as audio/video conferencing. Texas Instruments(TI)is a major provider of digital signal processors,namely the TMS320family.This family includes both dedicated and programmable16-bit fixed-point and32-point floating point DSPs. Application specific DSPs available from TI include audio/video applications that implement industry standards(MPEG,Dolby,etc.).Other possible uses include active noise cancellation,motor control, computer components, and consumer electronics.Most echo cancellation is done using a programmable DSP such as the TMS320C3x. Several companies have developed software to implement various echo cancellation algorithms.Philips Kommunikations Industrie AG has TMS320C3X Digital Signal Processing software which implements the CCITT standard for Acoustic Echo Control and allows full-duplex communication for audio/video conferencing. DSP Software Engineering,Inc.provides software for the implementation of an Audio Line Echo Canceller on t h e T M S320C3x.AT&T a l s o p r ov i d e s t h e QuietQuiet TM Acoustic Echo Cancellation(AEC) software as an implementation of there very own patented echo cancellation technology.[20]2.2.Benefits/Performance[20]QuietQuiet TM*Environments range from small cubicles to large conference rooms.* Provides high-quality, full-duplex*Adaptively cancels acoustic echoes arising in hands-free audio/video teleconferencing systems.*Environments range from small cubicles to large conference rooms.*Provides high-quality,full-duplex speech communications typical of dedicated video conferencing systems.* No switching, dropouts, or speech clipping.*All parties may be heard simultaneously(double talk).* Howling rejection.* Fast, completely automatic training.* No distracting or extraneous training signals.* Continuously adapts to changes in room acoustics.*Continuously adapts to changes in microphone and loudspeaker placement,loudspeaker volume setting, and movement of people.*Supports both3.5-KHz and7-KHz speech communications (G.722 and G.728).*Subband signal processing architecture minimizes processing load while maintaining high acoustic echo cancellation performance (fast convergence). *Designed to operate at room gains up to10dB, allowing an order of magnitude greater acousticpower output.* Audio Processing Bandwidth:125 - 3,500 Hz 2 dB, @ 8-KHz sample rate125 - 7,125 Hz 2 dB, @ 16-KHz sample rate*Acoustic Echo Compensation length is determined by host resource availability; varies with frequency * Convergence Rate of Adaptation: 30 dB/sec* Adaptive (only) Echo Cancellation: > 45 dB* Total Echo Cancellation: 60 dB, maximum* Room acoustic gain: up to 10 dB, nominal*Software state machine automatically determines each of four states(receive,transmit,double-talk, and idle)PKI Acoustic Echo Control for the TMS320C3x *CCITT G.167 compliant*Bandwidth 300... 3400 Hz / 50... 7000 Hz*Echo attenuation45dB(canceller+center-clipper) *Full-duplex capability (double talk)*Cancellation window 256 ms*SEND path delay 100 ms (option <2 ms)*Frequency shift 5 Hz*Line echo canceller for analog lines 2.3.Current ResearchI n a d d i t i o n t o t h e s e h a r d wa r e a n d s o f t wa r e implementations there is still applied research in making the algorithms smarter,less memory intensive,and less computationally expensive.There are several ways to reduce the computational complexity of echo cancellation algorithms including block adaptive filters,subband filtering,and frequency domain adaptive filters.Both the subband method and the frequency domain method not only are more computationally efficient but also converge faster than the standard LMS algorithm.The problem with each of these methods is that they both introduce a delay in the processing and that they typically lack the ability to track a changing impulse response.In order to overcome these problems,the fast Newton transversal filter algorithm has been recently proposed.The key to better computational efficiency in this approach is the fact that the prediction part of thefilter can be of lower order than the size of the filter.The LMS algorithm has been used extensively in acoustic echo cancellation even though it does not converge very well with speech signals.In cases such as mobile radio where fast convergence is necessary,the FNTF algorithm is better suited.The reason that fast convergence is needed with mobile radio is that the echo path is constantly changing,thus requiring the filter coefficients to be updated continually.However due to the high noise usually encountered in mobile radio environments,the adaptation can only be allowed when there is a high SNR--generally occurring in short bursts. So,a fast converging algorithm will enhance the performance of the echo cancellation.[2]1.The LMS AlgorithmThe LMS adaptive algorithm is well documented in various literature[1-4],hence only a basic introduction to the algorithm is given here--including all changes and important reference notes.The Algorithm is a simple gradient search algorithm that reduces some cost function,in this case the error between the original signal and the received signal(with the echo).The algorithm is designed to search for the best FIR filter coefficients that represent the echoes in the test space(room,stairwell,etc...).An example of the filter coefficients that are determined by the algorithm and resulting frequency response of the filter are shown in Figure 1.1.To determine the coefficients,the original reference signal is convolved with the FIR filter,and the result is an estimate of the echoes present in the recorded signal. The difference between the recorded signal and the original signal plus the estimate of the echo is used to determine how the coefficients will be updatedThe convolution indicated is not as computationally expensive as it appears.Since time is performing the shift operations,only one set of multiply/adds is needed to determine the echo estimate at the current time. Another time saving shortcut is to limit the number of coefficients updated.For example,if the echo must lag the signal by seconds,then a straight delay can be implemented without computing the coefficients over the time period where no echoes can exist.To further decrease the computational complexity and increase the convergence speed of the algorithm, subsampling could be used.Subsampling is simply splitting the input signal and the output signal into adjacent frequency subbands using analysisfilter banks. The impulse response is the system impulse response filtered by the appropriate subband filter.When this approach is used with the LMS algorithm,the convergence speed is increased because the adaptation step size can be set in each subband filter so that it is matched to the energy of the input signal in that particular frequency band.2.EXPERIMENTAL DESIGNIn order to evaluate the algorithm,several different sets of test data were necessary.Test signals included simple deterministic signals with predefined echoes,complex speech signals with predefined echoes,and simple deterministic signals with complex cavity induced echoes,and complex speech signals with complex cavity induced echoes.The algorithm was tested extensively on many simple signals,with predetermined echoes,to determine the effects of different parameters on convergence,final SNR,and other relativefigures of merit common to such devices.The output of these tests were recorded and analyzed using basic reference tools such as SNR, absolute error,and auditory difference.Upon completion of the preliminary tests the algorithm was tested on real data collected from the stairwell and from the small room adjacent to the stairwell(both rooms yield long-lived echoes).2.1.Experimental DataThe signals with predefined echoes,referred as simulated echo,were produced by convolving original data files with a known filter response.This process produced a perfect echo file in which all components of the signal,including the noise and very low level data, were exactly echoed.The cavity induced echoes were generated by one of two sources:a four story reverberant stairwell or a small highly reverberant room.To record the echoes produced by these reverberant cavities the following test was constructed.A cart containing a conventional tape player,a DAT recorder,and a microphone was placed as near to the center of the space as feasible.The tape player played prerecorded signals and sounds and the resulting signals were recorded on the DAT at 48 kHz. Test signals used were a chirp spanning0-20kHz,a chirp spanning0-500Hz,a1000Hz sine wave,a sum of100,1000,and10000Hz sine waves,a100Hz impulse train,and a single impulse.Upon completion of the test signals a variety of sounds were created in the space and were recorded including speech,footsteps, and door closure(which approximates an impulse).All prerecorded sounds lasted for30seconds.After analysis of this data an approximate impulse response of the room was developed. (See Figure 1.1)Figure 1.1 - Frequency Response of Small Roomτ2.2.Convergence Tests and SNRThe first and probably most important test of the algorithm is whether or not it converges.Obviously,if thefilter coefficients don’t converge,the code is useless, so several convergence tests were performed on simulated data.These tests consisted mainly of varying the error correction stepsize,,and examining the effects on the error,filter coefficients,and SNR plots (Figure2.1).By viewing these plots,it was often easier to tell whether the filter was properly adapting than it was to listen to the output with the echo removed.To account for variable loop gains the program allows run-time setting of the step size which has a default setting of 2^-10.2.3.Auditory AssessmentThe next test of effectiveness was to listen to the output for the appropriate cancellation of the echoes.This was probably the most satisfying test:hearing the clean output of the echo canceller.As stated earlier,the change was almost unnoticeable on the chirpfile played in the room,so this examination was mainly useful for the simulated echoes generated in the speech files,parison of Final CoefficientsEven though the error might converge and the filter coefficients stabilize,there was no guarantee that these coefficients were a good approximation of the room response.In order to determine this,the code must be run on various signals and the impulse response determined for each case must be examined for conformity.An example of how the coefficients converged in time for a simple echo response is shown below in Figure (***).A variety of known echoes were used to determine how well the coefficients converged to the actual echo response.A multiple echo response was used as an input,which the algorithm handled perfectly.Then a multiple echo response that extended past the number of taps was used as an input.The filter coefficients slowly converged to the echo response that was contained in the tap length,but the coefficients wobbled much more and took longer to converge.2.5.Echo Reduction of Unknown SignalUpon determination of the impulse response,this filter should be able to remove echo from any signal,even without a known reference,containing the same echo characteristics.This was attempted by three different means, the validity of which may be somewhat suspect. The first attempt was to use the determined frequency response and the FFT of the echo signal to produce the input signal as follows:(1) The application of this conversion to the frequency domain and back was too difficult to implement given limited resources (time).An infinite impulse response(IIR)filter whose coefficients were determined from the output of the echo canceller was created.Thisfilter was implemented using the direct form structure,but unfortunately,this filter was inherently unstable.Stability could have been achieved by reflecting the poles of the filter that were outside the unit circle back into the unit circle(as defined by the z-transform),but such an attempt was not made.MatLab,which is(in some circles)known for its signal processing toolbox,was employed to deconvolve the filter coefficients out of a signal that had been previously convolved with those(or an approximation to those) filter coefficients.Due to the extreme size and the numerical instability of the deconvolution routine this attempt to remove echoes from an unknown reference also failed.2.6.NoiseAn ever present problem in real-world data collection is 60Hz transformer,ballast,and power supply hum which significantly altered the results during the speech processing stage of the experiment.Other noise sources encountered in the course of experimentation included wind noise and equipment placement(which severely affects the system transfer function).In the process of playing and recording the data in this environment, noise and other errors quickly accumulate in the data. Hence it is necessary to establish a lower bound on the level of signal that it is feasible to cancel.To perform this function a cutoff parameter is specified,below which,the signal will not be processed.This cutoff also eliminates the case in which the signal is too low to produce an echo.2.7.System DelayInherent in this system setup is some finite delay introduced between the instant the sound is produced and the instant the microphone receives the sound.If the reference file and the echo are not perfectly aligned the filter will try to compensate for the difference.The term in the filter that is introduced by mis-alignment is not desired and can be compensated for by delaying theβx n()F1–Y f()H f()------------=update function for a predetermined number of samples that is less than the number of samples in which thefirst echo will occur.There is another important use of delay.If it is known that a system has an echo length that requires only200 taps but this echo occurs,perhaps,1000taps after the signal,by inserting a straight delay it is not necessary to calculate all of the coefficients of the filter--only those that are necessary to cover the echo length.3.EV ALUATION3.1.Determination of Step SizeOnce convergence of the filter on simulated echo data was confirmed by visual inspection of the error plots, tests were performed on the simulated data to determine appropriate step size,β.Obviously,if the step size is too small the canceller will take a long time to converge on the signal while a large step size may result in a divergent error.Figure2.1,which shows convergence as a function ofβ,indicates that as the step size is increased,the convergence time decreases in an inverse relationship.At step-sizes higher thanβ=0.008,the canceller was unstable for the simulated data given.This step size was much smaller for the real data,which would diverge forβ>0.0009,probably due to the number and the complexity of the echoes.Figure 3.1 Convergence as a Function ofβ3.2.Analysis of Simulated EchoBefore testing the code with real speech data,the code was tested using a simulated echo.This provided a method which allowed the results to be easily compared with the original signal.The output of the echo canceller was compared with the input signal as shown in the following series of Figures.In addition to visual and mathematical comparison(SNR),the input(with the echo),output(echo free),and the original signal were presented to a panel of judges that determined a subjective view as to the extent of improvement provided by the echo canceller.The first signal used to evaluate the echo canceller was a pure speech signal convolved with a triangular filter twenty taps wide with a maximum height of50%of the original signal and a delay of 2000 taps.The original speech signal is shown in Figure3.2, followed by the speech plus echo,Figure3.3,and the output with the cancelled echo,Figure3.4.It is clear from this that the canceller trains very well on the echo and almost completely eliminates it after approximately 500ms.This result can also be viewed on the absolute error plot shown in Figure3.5and the signal to noise ratio (SNR) plot shown in Figure 3.6.Figure 3.2 Original Speech SignalFigure 3.3 Speech Signal plus EchoFigure 3.4 Echo Canceller Output (Speech) Figure 3.5 Absolute Error (Signal - Output)Figure 3.6 Signal to Noise RatioAnother important consideration in the evaluation of the echo canceller is how the coefficients are being updated.Convergence is directly caused by the values of the filter coefficients and how similar they are to the true filter values.The plots below show how the filter coefficients change in time (Figures 3.7 - 3.9)Figure 3.7Figure 3.8Figure 3.9The frequency response of the test filter and the filter derived by the algorithm are shown in figures 3.10and 3.11respectively.Notice that these two plots are not exactly alike,this difference is due to the zero stuffing that occurred during the frequency transformation of the derived filter.Figure 3.10 Frequency Response of Original FilterFigure 3.11 Frequency Response of Derived Filter3.3.Analysis of Small RoomThe echo canceller performs very well on predefined echoes with signal to noise ratios greater than 40dB.Given the success of the echo canceller for simple signals/simple echoes and complex signals/simple echoes the next stage of the project could be investigated,namely applying these techniques to determine the characteristics of a small room.The first attempt was made using the low frequency chirp recorded in the small room.In this case,the ecsho recording was done in very close proximity to the speaker emanating the chirp.Therefore,the pure chirp signal dominated the recording,with comparatively low levels of echo.This may have been the reason for the quick convergence of the echo canceller.The plot of error versus time for this chirp signal,shown in Figure 3.7shows that the canceller takes approximately 11seconds to converge on the signal.The longer convergence time is due to the small step size required to avoid divergence from this complex echo.The resulting filter approximation of the room at the location of the recording is shown in Figure 3.8.3.12 3.14 3.16 3.18 3.20-200.00.0200.0400.0600.0Determined Filter Coefficients for Defined EchoLast Few Coefficients0.020.040.060.080.10-200.00.0200.0400.0600.0Determined Filter Coefficients for Defined EchoFirst Few Coefficients0.420.440.460.48-200.00.0200.0400.0600.0Determined Filter Coefficients for Defined EchoDuring the Adaptation Process-59.3-9.340.790.7Figure 3.9below represents the filter coefficients as a function of time.Figure 3.7 Chirp Signal ConvergenceFigure 3.8 Filter Approximation of RoomFigure 3.9 Filter Coefficients vs. TimeConvolution of this filter with an undistorted speech signal,gives an approximation of the speech echoed in the room,resulting in a muffled,low volume echo.The chirp was stored with a constant maximum volume of 10000while the chirp recording has a variety of levels the average of which is about 5000while the peak is much higher at the resonant frequency of the room.The result of the convolution of this room approximation and the speech file of Figure 3.2is shown in Figure 3.9.Notice the low level of the signal.This resultant filter may be a reasonable approximation of the room,but this would not be determined without more testing.In order to confirm the results,one of two tests must be successfully performed:Either the coefficients must be used to deconvolve an echo plus signal into just the signal without knowledge of the reference signal,this will be discussed later,or the canceller must be applied to different data from the room yielding final filter coefficients that are the same as those determined from the chirp.The method for data collection of the speech signals in the room was,unfortunately,completely different from the chirp.The speech data was recorded with the receiving microphone on the other side of the room from the transmitting device.This echo signal was louder than the original speech file due to a difference in the necessary amplification.We attempted to compensate for this by scaling the echo file such that the undistorted speech in each was approximately the same level.The speech and echo files were also aligned in an attempt to eliminate the delay between the source and receiver.The original speech and the speech plus echo files are shown in Figures 3.10 and 3.11, respectively.Figure 3.10 Original SpeechFigure 3.110.010.020.030.00.20.40.60.8 1.0-50.00.050.0100.0Filter Coefficients from Small Room10.020.030.040.050.0Reference Speech Signal0.010.020.030.040.050.0Speech with EchoThese plots clearly demonstrate that the reverberation in this room is extremely high.This complex signal created quite a problem with divergence of the coefficients,requiring a very small step size, B=0.00004, to remain stable.As can be seen in Figure3.12,the error never converges, even after20seconds.Although mostly useless because of the non-converging nature of the error plot,the resultant coefficients are shown in Figure 3.13. Figure 3.12Figure 3.13Notice that the coefficients seem to be symmetric about the time axis.The echo canceller output,Figure3.14for the reference signal shown in Figure3.10is probably not a good approximation of this room response since the filter coefficients are dissimilar to those determined from the chirp, Figure 3.8.Figure 3.14The results obtained using the chirp reference signal and the speech reference signal are very dissimilar.This difference is due mostly to the difference in how the two trials were conducted.Thefilter treats the space as a one -dimensional echo cancellation problem,therefore any time the physical setup is changed there is a new one-dimensional problem to solve.In order to determine if the coefficients are accurate,the techniques of signal reconstruction described in Section3.2were implemented.4.SUMMARY.Most of the project comes down to the implementation of a rather simple,but unexpectedly tricky algorithm. Although,initially,an attempt was made to implement t h e c o d e u s i n g a r r a y s b e c a u s e o f t h e i r l ow computational complexity,a successful program using a linked list data structure was finally coded.This structure allowed for versatility,but increased the run time considerably.Performing the updates using M=1removed the need for a full convolution for each sample and allowed for only storing the current echo and error.These improvements increased the speed of the code considerably,running at approximately real time for small filters in the range of 128 taps.The reverberation of the stairwell was too long for the tap lengths required to approximate the response of the room,a considerably longer filter was required,which causes the program to run at a somewhat slower rate. But,if this code were to be implemented in an environment similar to stairwell,hopefully,the response of the room would not change very quickly,and a long training process would be satisfactory.Unfortunately, even after a training period of30seconds,the canceller was not able to accurately develop a good filter representation of the small room for speech signals. There are many factors that may have caused this:If the signalfile and echofile are not exactly synchronized,the expected signal at a given time will not be present in either the signal or the echo and the canceller will attempt to compensate for this by increasing one of the early coefficients instead of the true echo response. Although the error plot for the chirp seemed to indicate a good room approximation,this may have been due to the low level of the echo in the recording or a synchronization problem,and,as the canceller trained on the first few coefficients,the error decreased without actually approximating the room response.The fact that the speech data was taken in a different manner than the chirp may also be a contributing factor0.5 1.0 1.5Room Response Filter Coefficients0.010.020.030.0Small Room Convergence Error0.010.020.030.0Echo Canceller Output。
回声消除技术--整理编

回声消除技术--整理编1引⾔在语⾳通信中,有⼀个很影响通话质量的因素就是回声。
回声就是指说话者通过通信设备发送给其他⼈的语⾳⼜重新⼜回到⾃⼰的听筒⾥的现象。
回声会对说话者产⽣严重的⼲扰,必须想办法消除。
⼀般,回声分为两种,即“电路回声”和“声学回声”。
“电路回声”可以通过硬件设备的合理设计⽽消除,在此不作讨论。
最复杂和最难消除的应该是所谓的“声学回声”。
“声学回声”是指远端⽤户的声⾳从听筒出来以后,经过空⽓或其他的传播媒介传到近端⽤户的话筒,再通过话筒录⾳后⼜重新传到远端⽤户的听筒中形成的回声。
当近端⽤户的放⾳⾳量⽐较⼤⽽录⾳设备和放⾳设备距离⽐较近时回声尤其明显。
“声学回声”受近端⽤户环境的影响,可能产⽣多路回声,包括直接回声和反射回声,各个回声的路径不同,延迟也就不同,因⽽难以消除。
2声学回声消除器对于声学回声消除,常见的消除算法有2类,即回声抑制(acoustic echo suppression)算法和声学回声消除(acoustic echo cancellation)算法。
回声抑制算法是较早的⼀种回声控制算法。
回声抑制是⼀acoustic echo suppression种⾮线性的回声消除。
它通过简单的⽐较器将准备由扬声器播放的声⾳与当前话筒拾取的声⾳的电平进⾏⽐较,如果前者⾼于某个阈值,那么就允许传⾄扬声器,⽽且话筒被关闭,以阻⽌它拾取扬声器播放的声⾳⽽引起远端回声。
如果话筒拾取的声⾳电平⾼于某个阈值,扬声器被禁⽌,以达到消除回声的⽬的。
由于回声抑制是⼀种⾮线性的回声控制⽅法,会引起扬声器播放的不连续,影响回声消除的效果,随着⾼性能的回声消除器的出现,回声抑制已经很少有⼈使⽤了。
声学回声消除算法(AEC)是对扬声器信号与由它产⽣的多路径回声的相关性为基础,建⽴远端信号(s(n))的语⾳模型,利⽤它对回声进⾏估计(e`(n)),并不断地修改滤波器的系数,使得估计值更加逼近真实的回声(e(n))。
aec的原理与应用

AEC的原理与应用1. AEC的定义AEC(Acoustic Echo Cancellation),中文称为声学回声抵消,是一种用于通信系统中消除回声的技术。
当我们进行语音通话时,如果存在回声影响,会严重影响通话质量。
AEC的作用就是通过算法对回声进行预测并抵消,从而提高通话清晰度。
2. AEC的原理AEC的原理基于声学模型和信号处理技术。
在通话过程中,声音会从发话人的扬声器上播放出来,然后通过麦克风被接收回来。
这个回声会被AEC算法实时采集并分析,然后生成一个与回声相反的信号,并将其混合到接收到的信号中,从而抵消回声。
AEC的主要原理包括以下几个步骤: - 回声采集:AEC会通过麦克风实时采集到发话人的声音,并将其作为回声信号。
- 回声预测:AEC根据采集到的回声信号,利用声学模型进行预测,得到一个与回声相反的信号。
- 回声抵消:AEC将预测得到的信号与接收到的信号混合,从而抵消回声。
- 过滤器更新:AEC会根据实时的环境变化来更新声学模型和滤波器参数,以适应不同的通话环境。
3. AEC的应用AEC广泛应用于各种语音通信系统中,如电话、网络电话、视频会议等。
它可以显著提高通话质量,降低回声对双方通话的干扰。
以下是AEC的一些具体应用场景:3.1 电话通话在传统的电话通话中,由于声音会从扬声器回馈到麦克风上,导致双方都听到回声。
使用AEC技术可以实时消除回声,使得通话变得清晰可听。
3.2 网络电话网络电话是指通过互联网进行语音通话的方式。
由于网络传输的延迟和抖动,会导致回声出现,并严重影响通话质量。
采用AEC技术可以消除回声,改善通话效果。
3.3 视频会议在视频会议中,参会人员通常配备话筒和扬声器,由于大多数视频会议软件都会自动开启语音回声消除功能,因此参会人员可以清晰地听到其他与会人员的声音,有助于提高会议效率。
4. AEC的优势与不足4.1 优势•提高通话质量:AEC可以有效地消除回声,使得通话声音清晰可听。
声音啸叫算法 c

声音啸叫算法c摘要:1.声音啸叫算法简介2.算法原理与基本步骤3.应用场景与实际案例4.我国在该领域的技术发展5.未来发展趋势与挑战正文:声音啸叫算法是一种重要的音频处理技术,广泛应用于通信、语音识别等领域。
本文将对声音啸叫算法进行简要介绍,并分析其原理、应用及我国在该领域的发展状况。
1.声音啸叫算法简介声音啸叫算法,英文名为Acoustic Echo Cancellation (AEC),是一种从噪声背景中分离出有用信号的算法。
通过消除麦克风和扬声器之间的声学反馈,可以提高语音通信的质量和语音识别系统的准确性。
2.算法原理与基本步骤声音啸叫算法的基本原理是利用麦克风阵列捕捉环境中的声音,通过数字信号处理技术对声音信号进行分析和处理,从而实现对有用信号的提取和抑制。
算法的基本步骤包括:(1) 采集原始声音信号(2) 对原始信号进行滤波处理,提取语音特征(3) 利用机器学习或深度学习方法对语音特征进行建模(4) 根据模型预测,对有用信号进行提取和抑制(5) 输出处理后的声音信号3.应用场景与实际案例声音啸叫算法在诸多领域有广泛应用,如电话会议、视频聊天、智能音响等。
以智能音响为例,用户在播放音乐或观看视频时,算法可以有效地消除扬声器产生的回声,从而提高音质。
4.我国在该领域的技术发展近年来,我国在声音啸叫算法领域取得了显著进展。
企业和科研机构加大投入,积极开展相关技术研究,推动产品创新。
目前,我国在麦克风阵列技术、深度学习算法等方面已达到国际领先水平。
5.未来发展趋势与挑战随着人工智能、物联网等技术的快速发展,声音啸叫算法在通信、娱乐等领域的应用将越来越广泛。
然而,算法性能的提高仍面临诸多挑战,如噪声环境下的鲁棒性、实时性要求等。
aec设备使用方法

aec设备使用方法1.引言1.1 概述概述随着科技的不断发展,AEC(自适应噪声消除)设备越来越广泛应用于各个领域。
AEC设备是一种通过采集环境声音,并根据环境噪声特征自适应地进行处理,从而降低或消除噪音的设备。
这项技术在通信、音频录制、语音识别和语音增强等领域发挥着重要的作用。
AEC设备通过采集环境声音信息,并根据环境噪声的特征自动进行频谱分析、滤波和噪声衰减等处理,从而提高音频的质量和清晰度。
与传统的单纯去噪方法相比,AEC设备能够自适应地识别和减弱环境噪声,同时保留原始信号的有效信息,使得人们可以更清晰地听到目标声音。
因此,AEC设备具有很高的实用性和应用价值。
本文将主要介绍AEC设备的使用方法,包括基本操作方法和高级功能的使用方法。
通过学习和掌握这些使用方法,读者将能够更好地利用AEC 设备,提高音频的质量和清晰度。
同时,本文还将对AEC设备的使用方法提出一些建议,旨在帮助读者更好地理解和应用AEC设备。
接下来,我们将详细介绍AEC设备的基本操作方法,包括如何正确连接设备、如何进行设备设置和调节参数等内容。
同时,我们还将介绍AEC 设备的高级功能使用方法,包括如何进行噪声特征分析、如何调整自适应参数以及如何应对特定环境下的噪声等。
总之,AEC设备是一种强大的噪声处理工具,通过自适应的处理方法,可以降低或消除环境噪声,提高音频的质量和清晰度。
本文将为读者详细介绍AEC设备的使用方法,希望能够帮助读者更好地理解和应用AEC设备,并提供一些建议。
在实际使用中,读者可以根据自身需求和具体环境,合理调整AEC设备的参数,以获得最佳的效果。
1.2 文章结构文章结构的目的是为读者提供一个清晰的导航,帮助他们理解文章的整体框架和组织。
通过明确列出每个部分的主题和内容,读者可以更好地掌握整篇文章的主旨和思路。
本文的结构分为引言、正文和结论三个部分。
引言部分包括概述、文章结构和目的。
在概述中,我们将介绍AEC设备是指什么以及它的重要性和应用范围。
回声参考信号
回声参考信号是用于回声消除系统中的一个重要组成部分,它用于估计和消除回声。
回声参考信号在回声消除(Acoustic Echo Cancellation, AEC)系统中起着至关重要的作用。
这个系统的目的是去除通信过程中产生的回声,以提高语音质量和通话清晰度。
以下是关于回声参考信号的一些详细信息:
1. 参考信号定义:在近端收到的远端声音信号称为参考信号。
这个信号是回声消除算法的基础,因为算法将基于该参考信号来估计回声。
2. 回声路径传递函数:参考信号经过扬声器播放、空气传播、房间墙体反射、麦克风采集后,会产生很多变换。
这些变换用数学的方式表达称为回声路径的传递函数。
3. 时延的影响:在实际的回声消除执行中,回声信号和参考信号之间存在一定的时延。
时延的来源包括从远端麦克风获取到参考信号,到参考信号从近端扬声器中播放出来所产生的时间差。
4. 自适应滤波器:自适应滤波器用于模拟回声的过程,并尝试消除它。
然而,它不能百分百消除回声,因此AEC的输出信号可能含有残留的回声信号。
这时,就需要一个后置滤波器(Post-Filter)来进行残留回声消除。
5. 啸叫行为:如果回声消除系统设计不当,可能会导致正反馈,即回声不断叠加,从而产生啸叫现象。
webrtc 回声消除 降噪 代码

webrtc 回声消除降噪代码WebRTC是一种实时通信技术,它可以在Web浏览器中实现视频、音频的传输和处理。
在WebRTC中,回声消除(Echo Cancellation)和降噪(Noise Reduction)是重要的功能之一,用于提高音频通信的质量。
回声消除是在音频通信中用来消除回声的技术。
回声通常发生在音频信号从扬声器播放出来,并且重新进入麦克风的情况下。
在WebRTC中,回声消除是通过自适应数字滤波器来实现的。
具体而言,WebRTC中的回声消除算法是基于自适应滤波器的最小均方(Least Mean Square,LMS)算法。
降噪是在音频通信中用来减少噪声的技术。
在WebRTC中,降噪是通过使用递归滤波器来实现的。
递归滤波器可以在频域和时域中对音频信号进行去噪处理,以提高音频的清晰度和信噪比。
WebRTC中回声消除和降噪的代码实现如下(以下代码示例为伪代码):回声消除:```function echoCancellation(audioIn, audioOut) {//初始化回声消除器const echoCancellation = new EchoCancellation();//音频输入方法function onAudioInput(data) {//处理音频输入const processedData = echoCancellation.processInput(data); //将处理后的音频数据传输给音频输出audioOut.write(processedData);}//音频输出方法function onAudioOutput(data) {//处理音频输出const processedData =echoCancellation.processOutput(data);//将处理后的音频数据传输给音频输入audioIn.write(processedData);}//将音频输入和输出的方法与WebRTC的音频流进行绑定audioIn.on("data", onAudioInput);audioOut.on("data", onAudioOutput);}```降噪:```function noiseReduction(audioIn, audioOut) {//初始化降噪器const noiseReduction = new NoiseReduction();//音频输入方法function onAudioInput(data) {//处理音频输入const processedData = noiseReduction.processInput(data); //将处理后的音频数据传输给音频输出audioOut.write(processedData);}//音频输出方法function onAudioOutput(data) {//处理音频输出const processedData = noiseReduction.processOutput(data); //将处理后的音频数据传输给音频输入audioIn.write(processedData);}//将音频输入和输出的方法与WebRTC的音频流进行绑定audioIn.on("data", onAudioInput);audioOut.on("data", onAudioOutput);}```上述代码示例中,我们创建了一个名为"echoCancellation"的函数和一个名为"noiseReduction"的函数来实现回声消除和降噪功能。
解密回声消除技术
解密回声消除技术一、前言因为工作的关系,笔者从2004年开始接触回声消除(Echo Cancellation)技术,而后一直在某大型通讯企业从事与回声消除技术相关的工作,对回声消除这个看似神秘、高端和难以理解的技术领域可谓知之甚详。
要了解回声消除技术的来龙去脉,不得不提及作为现代通讯技术的理论基础——数字信号处理理论。
首先,数字信号处理理论里面有一门重要的分支,叫做自适应信号处理。
而在经典的教材里面,回声消除问题从来都是作为一个经典的自适应信号处理案例来讨论的。
既然回声消除在教科书上都作为一种经典的具体的应用,也就是说在理论角度是没有什么神秘和新鲜的,那么回声消除的难度在哪里?为什么提供回声消除技术(不管是芯片还是算法)的公司都是来自国外?回声消除技术的神秘性在哪里?二、回声消除原理从通讯回音产生的原因看,可以分为声学回音(Acoustic Echo)和线路回音(Line Echo),相应的回声消除技术就叫声学回声消除(Acoustic Echo Cancellation,AEC)和线路回声消除(Line Echo Cancellation, LEC)。
声学回音是由于在免提或者会议应用中,扬声器的声音多次反馈到麦克风引起的(比较好理解);线路回音是由于物理电子线路的二四线匹配耦合引起的(比较难理解)。
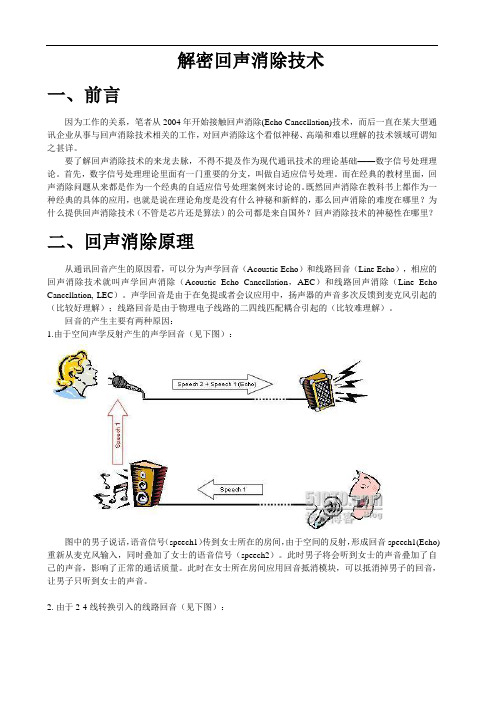
回音的产生主要有两种原因:1.由于空间声学反射产生的声学回音(见下图):图中的男子说话,语音信号(speech1)传到女士所在的房间,由于空间的反射,形成回音speech1(Echo)重新从麦克风输入,同时叠加了女士的语音信号(speech2)。
此时男子将会听到女士的声音叠加了自己的声音,影响了正常的通话质量。
此时在女士所在房间应用回音抵消模块,可以抵消掉男子的回音,让男子只听到女士的声音。
2. 由于2-4线转换引入的线路回音(见下图):在ADSL Modem和交换机上都存在2-4线转换的电路,由于电路存在不匹配的问题,会有一部分的信号被反馈回来,形成了回音。
一个开源的声学回声消除器(Acoustic Echo Cancellation)

一个开源的声学回声消除器(Acoustic Echo Cancellation)前段时间,搞了一阵声学回声消除,非常郁闷,因为没有成功,但可以说学到一点东西吧,至少理论上懂了一点。
为什么需要声学回声消除呢?在一般的VOIP软件或视频会议系统中,假设我们只有A和B两个人在通话,首先,A的声音传给B,B然后用喇叭放出来,而这时B的MIC呢则会采集到喇叭放出来的声音,然后传回给A,如果这个传输的过程中时延足够大,A就会听到一个和自己刚才说过的话一样的声音,这就是回声,声学回声消除器的作用就是在B端对B采集到的声音进行处理,把采集到声音包含的A的声音去掉再传给A,这样,A就不会听到自己说过的话了。
声学回声消除的原理我就不说了,这在网上有很多文档,网上缺少的是实现,所以,我在这把一个开源的声学回声消除器介绍一下,希望对有些有人用,如果有人知道怎么把这消除器用的基于实时流的VOIP软件中,希望能一起分享一下。
这个声学回声消除器是一个著名的音频编解码器speex中的一部分,1.1.9版本后的回声消除器才起作用,以前版本的都不行,我用的也是这个版本,测试表明,用同一个模拟文件,它有效果比INTEL IPP库4.1版中的声学回声消除器的还要好。
先说编译。
首先,从上下载speex1.1.9的源代码,解压,打开speex\win32\libspeex 中的libspeex.dsw,这个工作区里有两个工程,一个是libspeex,另一个是libspeex_dynamic。
然后,将libspeex 中的mdf.c文件添加到工程libspeex中,编译即可。
以下是我根据文档封装的一个类,里面有一个测试程序://file name: speexEC.h#ifndef SPEEX_EC_H#define SPEEX_EC_H#include <stdio.h>#include <stdlib.h>#include "speex/speex_echo.h"#include "speex/speex_preprocess.h"class CSpeexEC{public:CSpeexEC();~CSpeexEC();void Init(int frame_size=160, int filter_length=1280, int sampling_rate=8000);void DoAEC(short *mic, short *ref, short *out); protected:void Reset();private:bool m_bHasInit;SpeexEchoState* m_pState;SpeexPreprocessState* m_pPreprocessorState; int m_nFrameSize;int m_nFilterLen;int m_nSampleRate;float* m_pfNoise;};#endif//fine name:speexEC.cpp#include "SpeexEC.h"CSpeexEC::CSpeexEC(){m_bHasInit = false;m_pState = NULL;m_pPreprocessorState = NULL; m_nFrameSize = 160;m_nFilterLen = 160*8;m_nSampleRate = 8000;m_pfNoise = NULL;}CSpeexEC::~CSpeexEC(){Reset();}void CSpeexEC::Init(int frame_size, int filter_length, int sampling_rate){Reset();if (frame_size<=0 || filter_length<=0 ||sampling_rate<=0){m_nFrameSize =160;m_nFilterLen = 160*8;m_nSampleRate = 8000;}else{m_nFrameSize =frame_size;m_nFilterLen = filter_length;m_nSampleRate = sampling_rate;}m_pState = speex_echo_state_init(m_nFrameSize, m_nFilterLen);m_pPreprocessorState =speex_preprocess_state_init(m_nFrameSize,m_nSampleRate);m_pfNoise = new float[m_nFrameSize+1];m_bHasInit = true;}void CSpeexEC::Reset(){if (m_pState != NULL){speex_echo_state_destroy(m_pState);m_pState = NULL;}if (m_pPreprocessorState != NULL){speex_preprocess_state_destroy(m_pPreprocessorState);m_pPreprocessorState = NULL;}if (m_pfNoise != NULL){delete []m_pfNoise;m_pfNoise = NULL;}m_bHasInit = false;}void CSpeexEC::DoAEC(short* mic, short* ref, short* out) {if (!m_bHasInit)return;speex_echo_cancel(m_pState, mic, ref, out, m_pfNoise);speex_preprocess(m_pPreprocessorState, (__int16 *)out, m_pfNoise);}可以看出,这个回声消除器类很简单,只要初始化一下就可以调用了。
迈克罗尼克·菲利普斯无线耳机说明书
PhilipsIn-ear true wirelessheadphones6 mm drivers/closed-backBluetooth®TAT1215BKAlways ready to goIs there anything more useful than true wireless headphones with a charging case that fitsin the pocket of your slim-fit jeans? These splash- and sweat-resistant in-ear headphonesgive you great sound and up to 18 hours of play time.Easy pairing. Voice control.•Built-in mic with echo cancellation for clear audio•Smart pairing. Automatically find your Bluetooth device•Earbud switches to control music and calls•Easily wake your phone's voice assistantExtremely convenient, super-small charging case•6 mm neodymium drivers. Clear sound, punchy bass•IPX4 splash- and sweat-resistant•Small charging case for up to 18 hours play timeSnug, lightweight design•Secure, comfortable fitIssue date 2023-04-26Version: 5.1.412 NC: 8670 001 77563EAN: 48 95229 12294 9© 2023 Koninklijke Philips N.V.All Rights reserved.Specifications are subject to change without notice. Trademarks are the property of Koninklijke Philips N.V. or their respective SpecificationsIn-ear true wireless headphones6 mm drivers/closed-back Bluetooth®Highlights6 mm neodymium drivers.6 mm neodymium drivers. Clear sound, punchy bassNoise and echo cancellationNo more of those annoying echoes when you are talking on the phone. With our acoustic echo cancellation, you always get a clear, undisturbed connection.IPX4The small charging case couldn't be moreconvenient, and these true wireless headphones are also resistant to splashing from any direction. They won't mind a little sweat, and you don't need to worry about getting caught out in the rain.Secure, comfortable fitYou get great sound from the 6 mm neodymium drivers and you can rock your tunes in real comfort thanks to the snug, lightweight design. Soft, interchangeable ear-tip covers help you find a comfortable in-ear fit.Smart Bluetooth pairing.These earphones are ready to pair the instant you take them out of their charging case. Once they're paired, the earphones remember the last device they were paired with.Earbud switchesA button on each earbud makes it easy to control your listening. Adjust, skip or pause tracks, take or reject calls and more. The built-in mic with echo cancellation keeps sound clear when you do take a call.Super-small charging caseYou get up to 6 hours play time from a single charge, plus 12 extra hours from a fully charged case.Voice AssistantWake your phone's voice assistant without touching your phone. Ask Siri or the Google Assistant to play some music, call or send messages to friends, check the weather and more.Sound•Impedance:16Ohm •Speaker diameter: 6 mm •Sensitivity: 98 dB (1k Hz)•Frequency range: 20–20,000 Hz •Maximum power input: 3 mW •Driver type: DynamicConnectivity•Bluetooth version: 5.1•Supported codec: SBC•Maximum range: up to 10 m•Bluetooth profiles: A2DP, AVRCP, HFP •Type of wireless transmission: Bluetooth •WirelessConvenience•Water resistance: IPX4•Type of controls: Button •Mono mode for TWSDesign•Colour:Black•Ear coupling material: Silicone •Ear fitting: In-ear•In-ear fitting type: Silicone ear-tipPower•Music play time: 6+12 hr•Battery type (Earbud): Lithium Polymer (built-in)•Battery capacity (Earbud): 55 mAh •Battery capacity (Case): 320 mAh•Battery type (Charging case): Lithium Polymer (built-in)•Battery life standby time: 50 hr •Charging time: 2 hr•Number of batteries: 3 pcs •RechargeableAccessories•Charging cable: Micro USB cable, 200 mm •Charging case•Eartips: 2 sizes (S/M)•Quick Start GuideProduct dimensions•Product dimensions with stand (W x H x D): 6.5 x 3.33 x 3.6 cm•Weight (with stand): 0.043 kg Outer Carton•Number of consumer packages: 18•Outer carton (L x W x H): 36.3 x 25 x 16.8 cm •Gross weight: 1.95 kg •Tare weight: 0.996 kg•GTIN: 1 48 95229 12294 6•Net weight: 0.954 kgPackaging dimensions•Number of products included: 1•Packaging dimensions (W x H x D): 8.5 x 14 x 3.8 cm•Gross weight: 0.088 kg •Net weight: 0.053 kg •Tare weight: 0.035 kg •EAN: 48 95229 12294 9•Packaging type: Carton•Type of shelf placement: Hanging。
数字mic 和模拟 mic 区别e

随着数字信号处理技术的开展,使用数字音频技术的电子产品越来越多。
数字音频接口成为开展的潮流,采用脉冲密度调制〔PDM〕接口的ECM和MEMS数字麦克风也孕育而生。
目前,ECM和MEMS数字麦克风已经成为便携式笔记本电脑拾音设备的主流。
数字ECM或MEMS麦克风和传统的ECM麦克风相比,有着不可取代的优势。
首先,移动设备向小型化数字化开展,急需数字拾音器件和技术;第二,设备包含的功能单元越来越多,如笔记本电脑,集成了蓝牙和WiFi无线功能,麦克风距离这些干扰源很近,设备对抗扰要求越来越高;第三,三网合一的开展,需要上网,视频和语音通信可以同时进行,这在移动设备中通常会遇到环境噪声和回声的影响;第四,从提高生产效率角度,希望对麦克风采用SMT焊接。
数字麦克风适合SMT焊接,可以解决系统各种射频干扰对语音通信产生的噪声,富迪科技的数字阵列麦克风拾音技术可以抑制和消除通话时的回声和环境噪声,数字接口方便同数字系统的连接。
模拟麦克风和数字麦克风麦克风结构:ECM模拟麦克风通常是由振膜,背极板,结型场效应管(JFET)和屏蔽外壳组成。
振膜是涂有金属的薄膜。
背极板由驻极体材料做成,经过高压极化以后带有电荷,两者形成平板电容。
当声音引起振膜振动,使两者距离产生变化,从而引起电压的变化,完成声电转换。
利用结型场效应管用来阻抗变换和放大信号,有些高灵敏度麦克风采用运放来提高麦克风灵敏度〔见图1a〕。
ECM数字麦克风通常是由振膜,背极板,数字麦克风芯片和屏蔽外壳组成,数字麦克风芯片主要由缓冲级,放大级,低通滤波器,抗模数转换组成。
缓冲级完成阻抗变换,放大级放大信号,低通滤波滤除高频信号,防止模数转换时产生混叠,模数转换将放大的模拟信号转换成脉冲密度调制(PDM)信号,通常采用过采样的1位Δ-Σ模数转换〔见图1b〕。
MEMS模拟麦克风主要由MEMS传感器,充电泵,缓冲放大器,屏蔽外壳组成。
参照图1c,MEMS传感器由半导体工艺制成的振膜,背极板和支架构成,通过充电泵给背极板加上适当的极化偏压。
声回声抵消系统研究的开题报告
声回声抵消系统研究的开题报告一、研究背景声回声抵消系统(acoustic echo cancellation system)是一种常用于电话会议、互联网语音通信等场景中的信号处理技术,可以有效地抑制自身回音产生的干扰,提高通信质量和可靠性。
随着信息技术的发展,语音通信应用的普及,声回声抵消系统变得更加重要和必要,因此对其研究的需求也越来越大。
当前主流的声回声抵消系统方案主要有基于时间域、频域及自适应滤波等方法,在滤波器设计、收敛性能、运算量等方面各有优劣。
因此,针对不同应用场景、算法的优化设计和实现是当前该领域的研究重点之一。
二、研究目的本文旨在研究和设计一种高效、稳定、低延迟的声回声抵消系统,并对其性能进行评估和分析。
具体目标包括:1. 对声回声抵消系统的基本原理和常用算法进行分析和比较,选取合适的算法作为本文研究的基础。
2. 通过优化滤波器结构、参数设置等方法,设计实现一种高效、稳定、低延迟的声回声抵消系统。
3. 对所设计的系统进行性能测试,包括滤波器收敛速度、语音质量、系统响应等方面的评估和比较。
4. 分析所设计的系统的优缺点,提出进一步优化改进的方向和建议。
三、研究方法本文采用以下研究方法:1. 文献综述法:搜集和阅读相关文献和资料,对声回声抵消系统的基本原理、常用算法和研究进展进行综述和分析,为系统设计提供基础和参考。
2. 算法设计法:结合文献综述和实验分析,选取适合本文研究的算法,并对其进行优化设计和实现,以得到高效、稳定、低延迟的声回声抵消系统。
3. 性能测试法:对所设计的系统进行性能测试和分析,包括参数设置、滤波器收敛速度、语音质量、系统响应等方面的评估和比较,以便评价所设计系统的性能和优缺点。
四、论文结构本文主要分为以下几个部分:第一章研究背景和目的:介绍声回声抵消系统研究的背景和目的,阐述本文的研究思路和方法。
第二章声回声抵消系统的原理和常用算法:介绍声回声抵消系统的基本原理和常用算法,包括时间域方法、频域方法、自适应滤波等。
解密回声消除技术之一(理论篇)

一、前言因为工作的关系,笔者从2004年开始接触回声消除(Echo Cancellation)技术,而后一直在某大型通讯企业从事与回声消除技术相关的工作,对回声消除这个看似神秘、高端和难以理解的技术领域可谓知之甚详。
要了解回声消除技术的来龙去脉,不得不提及作为现代通讯技术的理论基础——数字信号处理理论。
首先,数字信号处理理论里面有一门重要的分支,叫做自适应信号处理。
而在经典的教材里面,回声消除问题从来都是作为一个经典的自适应信号处理案例来讨论的。
既然回声消除在教科书上都作为一种经典的具体的应用,也就是说在理论角度是没有什么神秘和新鲜的,那么回声消除的难度在哪里?为什么提供回声消除技术(不管是芯片还是算法)的公司都是来自国外?回声消除技术的神秘性在哪里?二、回声消除原理从通讯回音产生的原因看,可以分为声学回音(Acoustic Echo)和线路回音(Line Echo),相应的回声消除技术就叫声学回声消除(Acoustic Echo Cancellation,AEC)和线路回声消除(Line Echo Cancellation, LEC)。
声学回音是由于在免提或者会议应用中,扬声器的声音多次反馈到麦克风引起的(比较好理解);线路回音是由于物理电子线路的二四线匹配耦合引起的(比较难理解)。
回音的产生主要有两种原因:1.由于空间声学反射产生的声学回音(见下图):图中的男子说话,语音信号(speech1)传到女士所在的房间,由于空间的反射,形成回音speech1(Echo)重新从麦克风输入,同时叠加了女士的语音信号(speech2)。
此时男子将会听到女士的声音叠加了自己的声音,影响了正常的通话质量。
此时在女士所在房间应用回音抵消模块,可以抵消掉男子的回音,让男子只听到女士的声音。
2.由于2-4线转换引入的线路回音(见下图):在ADSL Modem和交换机上都存在2-4线转换的电路,由于电路存在不匹配的问题,会有一部分的信号被反馈回来,形成了回音。
详解低延时高音质:回声消除与降噪篇
详解低延时⾼⾳质:回声消除与降噪篇在实时⾳频互动场景中,除了我们上⼀篇讲到的编解码会影响⾳质与体验,在端上,降噪、回声消除、⾃动增益模块同样起着重要作⽤。
在本篇内容中我们将主要围绕回声消除和降噪模块,讲讲实时互动场景下的技术挑战,以及我们的解决思路与实践。
回声消除的三⼤算法模块优化在语⾳通信系统中,回声消除(Echo Cancellation)⼀直扮演着核⼼算法的⾓⾊。
⼀般来说,回声消除的效果受诸多因素的影响,包括:声学环境,包括反射,混响等;通话设备本⾝声学设计,包括⾳腔设计以及器件的⾮线性失真等;系统性能,处理器的计算能⼒以及操作系统线程调度的能⼒。
声⽹回声消除算法在设计之初,就将算法性能、鲁棒性和普适性作为最终的优化⽬标,这⼀点对于⼀个优秀的⾳视频 SDK 来说⾄关重要。
⾸先,回声是怎么产⽣的?简单来讲,就是你的声⾳从对⽅的扬声器发出,这个声⾳⼜被他的麦克风给收录了进去,这个被麦克风收录的声⾳⼜传回到你这⼀端,你就听到了回声。
为了消除回声,我们就要设计⼀个算法将这个声⾳信号从麦克风信号中去除掉。
那么声学回声消除模块(AEC, Acoustic Echo Cancellation)是如何消除回声的呢?具体的步骤见如下简图所⽰:第⼀步需要找到参考信号/扬声器信号(蓝⾊折线)跟麦克风信号(红⾊折线)之间的延迟,也就是图中的 delay=T。
第⼆步根据参考信号估计出麦克风信号中的线性回声成分,并将其从麦克风信号中减去,得到残差信号(⿊⾊折线)。
第三步通过⾮线性的处理将残差信号中的残余回声给彻底抑制掉。
与以上的三个步骤相对应,回声消除也由三个⼤的算法模块组成:延迟估计(Delay Estimation)线性⾃适应滤波器(Linear Adaptive Filter)⾮线性处理(Nonlinear Processing)其中「延迟估计」决定了AEC的下限,「线性⾃适应滤波器」决定了 AEC 的上限,「⾮线性处理」决定了最终的通话体验,特别是回声抑制跟双讲之间的平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IJCA Special Issue on “Novel Aspects of Digital Imaging Applications”DIA, 2011 Acoustic Echo Cancellation for Noisy SignalsBabilu Daniel Karunya University Coimbatore Jude.D.Hemanth Karunya University CoimbatoreABSTRACTEcho is the time delayed version of the original signal. Acoustic echo results from a feedback path set up between the speaker and the microphone in a mobile phone, hands-free phone .Echo can degrade the quality of service in telecommunication. Therefore echo cancellation is an important part of communication systems. A new approach based on the number of coefficients in an adaptive finite impulse response filter based acoustic echo cancellation setup is an important parameter, affecting the overall performance of the echo cancellation. Too few coefficients give under modeling and too many cause slow convergence and an additional echo due to the mismatch of the extra coefficients This paper focuses on the use of adaptive filtering techniques to cancel this unwanted echo thus increasing communication qualityGeneral TermsEcho cancellation, adaptive filtering algorithms. KeywordsEcho ,adaptive filtering.1.INTRODUCTIONAcoustic echo occurs when an audio signal is reverberated in a real environment, resulting in the original intended signal plus attenuated, time delayed images of this signal. Strong and delayed echo signals is very annoying and can make the conversation impossible The hands free telecommunication system has both an active loudspeaker and microphone input operating simultaneously. When a signal is received by the system, it is output through the loudspeaker into an acoustic environment. This signal is reverberated within the environment and returned to the system via the microphone input. It is then transmitted to the original sender as time delayed and attenuated images of the original signal. The occurrence of acoustic echo in speech transmission causes signal interference and reduced quality of communication. The method used to cancel the echo signal is known as adaptive filtering. Adaptive filtering constitutes one of the core technologies in digital signal processing and finds numerous application areas in science as well as in industry. Adaptive filtering can be useful in situations when speech signal is submerged in noisy environment. These applications involve processing of signals that are generated by systems whose characteristics are not known a priori. Under this condition, a significant improvement in performance can be achieved by using adaptive rather than fixed filters. Adaptive filters are used to track the variations in the input signal because the input signal is not stationary signal. Adaptive filters are dynamic filters which iteratively alter their characteristics in order to achieve an optimal desired output. An adaptive filter algorithmically alters its parameters in order to minimize a function of the difference between the desired output d(n) and its actual output y(n). This function is known as the cost function of the adaptive algorithm. The main aim of the adaptive filtering algorithm is to minimize the cost function. The echo canceller identifies the transfer function of the acoustic echo path i.e. the impulse response H(n) between the loudspeaker and the microphone. Since the impulse response varies as a person moves and varies with the environment, an adaptive filter echo replica y(n) is then subtracted from the echo signal d(n) to give the error e(n)= d(n) y(n).This is used to identify H(n).The characteristics of a filter can be expressed as a vector consisting of values known as tap weights that determines the performance of the filter. The desired signal is obtained by convolving the input signal with the impulse response of the acoustic environment and an echo replica is created at the output of the adaptive filter. The number of elements in impulse response vector corresponds to the order of the filter. The adaptive algorithm should provide real time operation, fast convergence, and high Echo Return Loss Enhancement (ERLE).2.PROBLEM STATEMENTAn echo canceller has to deal with a number of challenges in order to perform robust echo cancellation2.1 Avoiding DivergenceNear end speech will cause the adaptive filter to diverge if the echo canceller does not detect a double talk condition. Double talk detectors are used to detect if the far end signal is corrupted by the near end speech signal. Under specific conditions, certain algorithms are bound to diverge and corrupt the signal or even add echo to the line. Good echo cancellers are tuned to avoid divergence situations in nearly all conditions.2.2 Handling doubletalkIn a normal conversation, both talkers often speak simultaneously or interrupt each other during which the echo and speech have similar characteristics and occupy same bandwidth. Those situations are called doubletalk. It may try to cancel the speech signal Doubletalk presents a special processing challenge to echo cancellers.2.3 Preventing ClippingClipping occurs when a part of the speech is erroneously removed during a telephone conversation. Clipping results due to the lack of a precise Non-Linear Processor (NLP). Specifically, the NLP fails to start and stop at the right time. It replaces parts of words with background noise, which makes the conversation difficult to understand.DIA, 20113. PROPOSED WORKVarious adaptive filter algorithms can be utilized to cancel the echo and to reduce the noise to a minimum value. The aim of an adaptive filter is to calculate the difference between the desired signal d(n) and the adaptive filter output, y(n) to obtain e(n). This error signal is fed back into the adaptive filter and its coefficients are changed algorithmically in order to minimize a function of this difference, known as the cost function(MSE). Cost function is used because it modify the transfer function to minimize cost on next iteration.Adaptive filters are required because some parameters of the processing operation are not known in advance .In acoustic echo cancellation the adaptive filter output will be equal to echoed signal. When the adaptive filter output is equal to desired signal the error signal goes to zero. In this situation the echoed signal would be completely cancelled. Here we are analyzing various adaptive filter algorithms and finding which algorithm shows best performance.MSE adaptive filters try to minimize the cost function equal to the expectation of squared difference between the desired signal and actual adaptive filter output . Input signal x (n)Fig 1. Adaptive echo cancellation system3.1 LMS algorithmLMS Algorithms are a class of adaptive filters that will mimicthe desired filter by finding the filter coefficients. It will produce the least mean squares of the error signal .It uses stochastic gradient descent based method where filter is adapted based on error at the current time. This algorithm is widely used in digital signal processing. The fixed step size least mean square (FSS LMS) algorithm is an important member of the family of stochastic gradient algorithms. A path that changes the signal x is called h. Transfer function of this filter is not known in advance. The task of the LMS algorithm is to estimate the transfer function of the filter. Echo signal is obtained by convolving the input signal with impulse response of the echo path and is denoted by r. In this case r is the echo and h is the transfer function of the hybrid. The near-end speech signal v is added to the echo. The adaptive algorithm tries to create a filter w . The transfer function of the filter is an estimate of the transfer function for the hybrid. This transfer function in turn isused for calculating an estimate of the echo. The echo estimate is denoted by rˆ. x Fig 2. LMS algorithmBy the addition of signals the output signal from the algorithm isv + r – rˆ = v + e (1) where e denotes the error signal. The error signal and the input signal x are used for estimation of the filter coefficient vector w. Choosing the filter weight is one of the main problems because the path h is not stationary. Therefore, the filter weights must be updated frequently so that the adjustment to the variations can be performed. Updating of the filter weights is realized in accordance withw(k + 1) = w(k) - μgw(k ) (2) for k = 0,1,2,··· where gw(k) represents an estimate of the gradient vector and μ is the convergence factor or step size. This step size parameter controls the influence of updating factor. If the step size is too small it will take more time to converge. It does not require matrix inversion nor measurement of correlation function.The impulse response depend on the filter size and is obtained using impulse function for random number of iterations(i).impulse(((i-1)*filter_size/5)+1)=1/i (3)3.1.1 Derivation of LMS AlgorithmDuring every iteration the tap weight adaptation updates the tap weight vector w in the direction of minimizing cost function to find w 0 . Using the current tap weight vector and the current gradient of the cost function with respect to the filter tap weight coefficient vector, filter coefficient can be updated. w(n+1)=w(n)-2µ∇ξ(n) (4)ξ(n )=E[e 2(n)] (5) Each recursion shifts the value of the filter coefficients closer toward their optimum value as the negative gradient vector points in the direction of steepest descent for the N dimensional quadratic cost function, , which corresponds to the minimum achievable value of t he cost function, ξ(n). Here the expectation for the error signal is not known so the instantaneous value is used as an estimate w(n+1)=w(n)-µ∇ξ(n) (6)ξ(n )=e 2(n) (7)∇ξ(n)= ∇( e 2(n)) (8)=∂(e 2(n))/ ∂w (9) =2e(n) ∂e(n)/ ∂w (10) =2e(n) ∂(d(n)-y(n))/ ∂w (11)=-2e(n) ∂ew T(n)x(n)/ ∂w (12) =-2e(n)x(n) (13)DIA, 2011Therefore the recursion for the LMS adaptive algorithm can be written asw(n +1) = w(n) + 2μe(n)x(n). (14) 3.1.2Implementation of LMS AlgorithmEach iteration of the LMS algorithm requires 3 distinct steps in this order:a.The output of the FIR filter, y(n) is calculated usingequationy(n)=w T (n)x(n). (15) b.The value of the error estimation is calculated usingequatione(n)=d(n)-y(n) (16) c. The tap weights of the FIR vector are updated inpreparation for the next iteration.w (n +1) = w(n) + 2μe(n)x(n) (17) The main reason for the popularity of LMS algorithms in adaptive filtering is its computational simplicity, making it easier to implement than all other commonly used adaptive algorithms. For each iteration the LMS algorithm requires 2N additions and 2N+1 multiplications (N for calculating the output, y(n), one for 2μe(n) and an additional N for the scalar by vector multiplication).3.2VSLMS AlgorithmBoth the LMS and the NLMS algorithms have a fixed step size value for every tap weight in each iteration. In the Variable Step Size Least Mean Square (VSLMS) algorithm the step size for each iteration is expressed as a vector, μ(n). Each element of the vector μ(n) is a different step size value corresponding to an element of the filter tap weight vector, w(n).Variable step size is constrained to maximum and minimum step size value of LMS Algorithm to ensure stability. The major drawback with this algorithm is that it requires the user to select the initial step size to control the adaptive behavior of the step size sequence .3.2.1Derivation of VSLMS AlgorithmThe VSLMS algorithm is as followsw(n +1) = w(n) + 2μg(n) (18) where g(n)=e(n)x(n) (19) Where g is a vector comprised of the gradient terms, g i(n)=e(n)x(n-i), i=0….N-1, the length corresponds to the order of the adaptive filter. The values for μ(n) can be calculated. The choice is dependent on the applicationµ(n)= µ(n-1)+ ρsign(g(n))sign(g(n-1)) (20) Here ρ is a small positive constant optionally used to control the effect of the gradient terms on the update procedure. In order to ensure the step size parameters do not become too large (resulting in instability), or too small (resulting in slow reaction to changes in the desired impulse response), the allowable values for each element in the step size are bounded by upper and lower values. As with the standard LMS algorithm statistics of the signal must be known in advance. It is necessary to guarantee optimal performance of the adaptive filter. 3.2.2Implementation of VSLMS AlgorithmThe VSLMS algorithm is executed by following these steps for each iteration . With ρ=1, each iteration of the VSLMS algorithm requires 4N+1 multiplication operations.a.The output of the adaptive filter is calculated.y(n)=∑w(n)x(n-i)=w T (n)x(n) (21)b.The error signal is calculated as the differencebetween the desired output and thefilter output.e(n) = d(n) − y(n) (22)c.The gradient, step size and filter tap weight vector forthe next iteration. (23) 3.3NLMS AlgorithmThe primary disadvantage of the LMS algorithm is its fixed step size parameter for every iteration. So before starting adaptive filtering operation, statics of the input signals must be known in advance. In practice this is rarely achievable. Even if we assume speech signal as the only input to adaptive echo cancellation , there are still many other factors such as signal input power and amplitude which will affect its performance. In order to achieve faster convergence speed and for non stationary input NLMS Algorithm is the most preferable choice. The normalized least mean square algorithm (NLMS) is an extension of the LMS algorithm. It selects a different step size value, μ(n), for each iteration of the algorithm. This step size is proportional to the inverse of the total expected energy of the instantaneous values of the coefficients of the input vector x(n).When the variation of the input signal power is very large stability is not affected because of the normalization of step size with an estimate of the input signal variance. The recursion formula for the NLMS algorithm can be written asw(n+1)=w(n)+e(n)x(n)/x T (n )x (n ). (24)3.3.1Derivation of NLMS AlgorithmTo derive the NLMS algorithm we consider the standard LMS recursion, for which we select a variable step size parameter, μ(n). This parameter is selec ted so that the error value , e+ (n), will be minimized using the updated filter tap weights, w(n+1), and the current input vector, x(n).w(n+1)=w(n)+2µ(n)e(n)x(n) (25) e+ (n)=d(n)-w T (n+1)x(n) (26) =(1-2µ(n)x T (n)x(n))e(n) (27) Next we minimize (e+ (n)) 2, with respect to μ(n). Using this we can then find a value for μ(n) which forces e+ (n) to zero.µ(n)=1/2x T(n)x(n) (28) This μ(n) is then substituted into the standard LMS recursion replacing μ, resulting in the following.w(n+1)=w(n)+2µ(n)e(n)x(n) (29) w(n+1)=w(n)+1.e(n)x(n)/x T (n)x(n) (30) w(n+1)=w(n)+µ(n)x(n) (31) where µ(n)=µ/x T x+ ψ(32) Here the value of ψ is a small positive constant in order to avoid division by zero when the values of the input vector are zero.3.3.2Implementation of NLMS AlgorithmAs the step size parameter is chosen based on the current input values, the NLMS algorithm shows far greater stability with unknown signals. This combined with good convergence speed and relative computational simplicity make the NLMS algorithm ideal for the real time adaptive echo cancellationDIA, 2011system. Each iteration of the NLMS algorithm requires 3N+1 multiplications, this is only N more than the standard LMS algorithm. Each iteration of the NLMS algorithm requires these steps in the following ordera.The output of the adaptive filter is calculatedy(n)=∑w(n)x(n-i)=w T (n)x(n) (33)b. An error signal is calculated as the difference betweenthe desired signal and the filter output.e(n) = d(n) − y(n) (34)c.The step size value for the input vector is calculated.µ(n)=1/x T(n)x(n) (35)d.The filter tap weights are updated in preparation forthe next iterationw(n+1)=w(n)+µ(n)e(n)x(n) (36) 3.4VSNLMS AlgorithmThe VSLMS algorithm still has the same drawback as the standard LMS algorithm in that to guarantee stability of the algorithm, a statistical knowledge of the input signal is required prior to the algorithms commencement. the major benefit of the NLMS algorithm is that it is designed to avoid this requirement by calculating an appropriate step size based upon the instantaneous energy of the input signal vector. It is a natural progression to incorporate this step size calculation into the variable step size algorithm, in order increase stability for the filter without prior knowledge of the input signal statistics. In the VSNLMS algorithm the upper bound available to each element of the step size vector, μ(n), is calculated for each iteration. As with the NLMS algorithm the step size value is inversely proportional to the instantaneous input signal energy.3.4.1Implementation of VSNLMS AlgorithmIt is essentially an extension of the implementation of the VSLMS algorithm with the added calculation of a maximum step size parameter for each iteration.a.The output of the adaptive filter is calculated.y(n)=∑w(n)x(n-i)=w T(n)x(n) (37)b.The error signal is calculated as the differencebetween the desired output and the filter output.e(n) = d(n) − y(n) (38)c.The gradient, step size and filter tap weight vectorsare updated using the following equations inpreparation for the next iteration.For i = 0,1,...,N -1g(n)=e(n)x(n) (39) µi(n)= µi(n-1)+ ρg i(n)g i(n-1) (40) if µi(n)>µmax , µi(n)= µmax(n) (41) if µi(n)<µmin, , µi(n)= µmin(n) (42) w i (n+1)=w i (n)+2µi (n)g i (n) (43) ρ is an optional constant the same as is the VSLMS algorithm. With ρ =1, each iteration of the VSNLMS algorithm requires 5N+1 multiplication operations.4.SIMULATION RESULTSEach of the adaptive filtering algorithms were implemented using MATLAB. MATLAB is a powerful, general-purpose, mathematical software package. Matlab possesses excellent graphics and matrix handling capabilities. The salient features of MATLAB are its in-built mathematical toolboxes and graphic functions. Echoed signal was generated by defining an appropriate impulse response then convolving this with a vocal input wav file.The MATLAB software environment suited the needs of this research for the following reasons:a. The input signals (far-end and near-end talker signals)were voices. These voices were stored as wav filesand can be easily imported into the code.b. The intermediate signals and output signals wereobtained as wav files.c. The signal processing toolbox has in-built functionsfor almost all signal processing applications.d. Since MATLAB supports graphics, the results of asimulation could be presented in a graphical formatwith ease.4.1.1LMS Algorithm outputFig 3.Error signal and cost function using lms algorithmThe MSE shows that as the algorithm progresses the average value of the cost function decreases, this corresponds to the LMS filters impulse response converging to the actual impulse response, more accurately emulating the desired signal and thus more effectively cancelling the echoed signal.The number of iterartions for the error function and cost function can be same or different.4.1.2 NLMS Algorithm outputFig 4 shows that error signal is smaller and the amplitude of the mean square error is in the order of ten times smaller than that of the standard LMS algorithm. This comes with the addition of only N more multiplication operations. Convergence rate of the NLMS algorithm is greater than that of the standard LMS algorithm because impulse response of NMLS is approximately twice than that of the LMS algorithm.NLMS algorithm works as best algorithm for acoustic echo cancellation..Fig 4. Error signal and cost function using nlms algorithm4.1.3 VSLMS Algorithm outputVSLMS algorithm performs poorly having a peak mean square error approximately greater than that of the standard NLMS algorithm. This is very poor considering each iteration of theVSLMS algorithm has 2N more multiplication operations.Fig 5. Error signal and cost function using vslms algorithm4.1.4VSNLMS Algorithm outputFig 6. Error signal and cost function using vsnlmsalgorithm Fig 6 shows 1500 iterations of the algorithm with a minimum step size of 0, and a ρ value of 1. It can be seen that the results are virtually identical to those for the VSLMS algorithm because it does not calculate the actual step size ,although the upper step size boundary is calculated for each iteration.5. EVALUATION OF ECHO CANCELLATION ALGORITHMIn order to evaluate the effective working of the algorithm, some basic tests were conducted.5.1.1 Convergence TestSeveral tests were performed on the simulated data to verify whether the filter coefficients have converged or not. If the filter coefficients are converged the code would be useful. The impulse response of NLMS algorithm is greater than LMS algorithm for the same number of iterations,this shows that convergence rate of NLMS algorithm is greater than LMSalgorithm.Fig 7. Impulse response of NLMS algorithmFig 8. Impulse response of LMS algorithm5.1.2 Echo Return Loss Enhancement (ERLE)ERLE measures the amount of loss introduced by the adaptive filter alone. Quality of the echo cancellation can be evaluated by ERLE. It is defined as ratio of send in power to the power of the residual signal immediately after the cancellation. Higher the value ,better is the echo canceller. ERLE was obtained inrange of 30-40 dB which is desirable for a good echo canceller.Fig 9. Plot of ERLE versus number of samplesFig 10. Plot for the ERLE for NLMS algorithmERLE measured in dB is defined as the ratio of the instantaneous power of the signal d(n) and the instantaneous power of the residual error signal, e(n), immediately after cancellation. ERLE measures the amount of loss introduced by the adaptive filter alone.ERLE=10log p d (n)/p e (n)=10log E[d 2(n)]/E[e 2(n)] (44) The average ERLE obtained is around 22.34 in decibels. The average ERLE obtained for LMS algorithm is 18.23 in decibels.The number of iterations is randomly selected.Fig 11. Plot of ERLE for LMS algorithm5.1.3 Audio quality TestThe audio of the output signal was presented to a panel. The panel was almost not able to distinguish the near end signal v(n), and the output signal with the residual echo, e(n) was removed. Some discrepancies in the audio shows the fact that the real-time applications cannot escape the factor called noise.Fig 12. Plot of output signal5.1.4 Recovery timeRecovery time after echo cancellation has been used to check whether the original signal is delayed. If the original signal is heared without any delay then there is no echo.DIA, 2011Table 1. comparison of algorithms6.CONCLUSIONThe proposed adaptive length algorithms, based on estimation of the cost function is more robust and has better tuning possibilities for acoustic echo cancellation environment ,it can update the unknown coefficients. Among the four algorithms NLMS shows better performance and increased convergence rate, it requires no extra delay. The aim of every algorithm is to achieve minimum mean square error at a higher rate of convergence with lesser complexity. NLMS is one of the most popular algorithms in the field of adaptive digital signal processing, due to simplicity.7.ACKNOWLEDGEMENTI would like to thank my guide Mr.Jude.D.Hemanth for his sincere support and being approachable and available whenever I needed any assistance. Above all I render my gratitude to the Almighty God who bestowed self confidence, ability and strength in time to complete this task. 8. REFERENCES[1] Christian Schuldt a, FredricLindstromb,HaiboLic,Ingvar Claesson, elsevier 2009 Adaptive filter lengthselection for acoustic echo cancellation,[2] Seon Joon Park,Student Member,IEEE,Chom GunCho,Chungyong Lee,Member IEEE,Dae Hee Youn,seniorMember,IEEE,Integrated Echo and Noise canceller forHands –Free Applications[3] KunShi,Xiao G.TongZhou Atlanta,2009 An efficientacoustic echo cancellation design for systems with longroom impulses and nonlinear loudspeakers School ofElectrical and Computer Engineering, Georgia Institute ofTechnology[4] Andreas Mader, Henning Puder, Gerhard UweSchmidt,Darmstadt University of Technology, Institut furNachrichtentechnik, Fachgebiet Theorie der Signale,elsevier 2000 Step-size control for acoustic echocancellation-an overview[5] Fabian Kuech_,Walter Kellermann ,University ofErlangen-Nuremberg, Erlangen, Germany elsevier 2006Orthogonalized power filters for nonlinear acoustic echocancellation[6] T. Nguyen-Ky, J. Leis, W. Xiang Faculty of Engineeringand Surveying, University of Southern Queensland,Toowoomba Queensland , Australia, 2010 An improvednew error estimation algorithm for optimal filter lengthsfor stereophonic acoustic echo cancellation[7] Ville Myllyla, Elsevier 2006 Residual echo filter forenhanced acoustic echo control[8] Magnus Evestedt , Alexander Medvedev, TorbjornWigren elsevier,2008 Windup properties of recursiveparameter estimation algorithms in acoustic echocancellation。