simulink调用脚本文件
simulink中参数的定义

simulink中参数的定义Simulink中参数的定义Simulink是一种功能强大的可视化模型设计软件,用于对动态系统进行建模和仿真。
在Simulink中,参数是指模型中使用的数字、字符串或其他数据类型的值。
定义参数可以帮助我们在模型设计过程中快速修改和调整模型的行为。
以下是Simulink中参数的常见定义方式:1. 直接赋值使用直接赋值的方式,可以在模型中直接将参数的值设置为一个常量。
例如:SampleTime = ; % 设置采样时间为秒理由:直接赋值是最简单直接的方式,适用于不需要频繁修改的参数。
2. 模块输入将参数作为模块的输入端口,可以在每次仿真时通过输入信号来改变参数的值。
例如:function y = myFunction(u, Gain)y = u * Gain; % 使用输入的Gain参数进行计算end理由:通过模块输入参数,可以将参数的值与其他信号动态关联起来,实现更灵活的模型设计和仿真。
3. MATLAB函数文件在Simulink中,可以通过使用MATLAB函数文件来定义参数的值。
例如:function value = myParameter()value = 10; % 定义参数的值为10end并在Simulink模型中使用myParameter函数来获取参数的值。
理由:MATLAB函数文件可以进行更复杂的计算和逻辑操作,使得参数的值可以根据模型中的其他条件来动态确定。
4. MATLAB工作区变量在MATLAB工作区中定义一个变量,并在Simulink模型中引用该变量作为参数的值。
例如:myVariable = 5; % 在MATLAB工作区中定义变量并在Simulink模型中使用Variable对象,选择myVariable作为参数的值。
理由:使用MATLAB工作区变量可以方便地对参数进行修改和调整,而无需改动模型设计。
5. MATLAB脚本或命令行在MATLAB脚本或命令行中使用set_param命令来设置模型中的参数值。
simulink工具箱的基本操作流程
simulink工具箱的基本操作流程
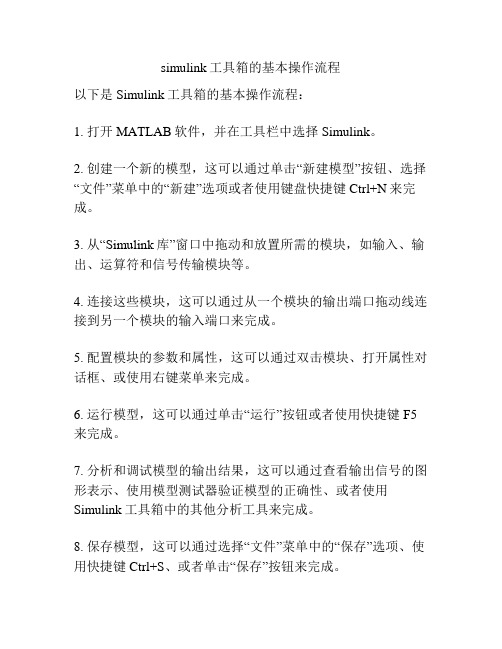
以下是Simulink工具箱的基本操作流程:
1. 打开MATLAB软件,并在工具栏中选择Simulink。
2. 创建一个新的模型,这可以通过单击“新建模型”按钮、选择“文件”菜单中的“新建”选项或者使用键盘快捷键Ctrl+N来完成。
3. 从“Simulink库”窗口中拖动和放置所需的模块,如输入、输出、运算符和信号传输模块等。
4. 连接这些模块,这可以通过从一个模块的输出端口拖动线连接到另一个模块的输入端口来完成。
5. 配置模块的参数和属性,这可以通过双击模块、打开属性对话框、或使用右键菜单来完成。
6. 运行模型,这可以通过单击“运行”按钮或者使用快捷键F5来完成。
7. 分析和调试模型的输出结果,这可以通过查看输出信号的图形表示、使用模型测试器验证模型的正确性、或者使用Simulink工具箱中的其他分析工具来完成。
8. 保存模型,这可以通过选择“文件”菜单中的“保存”选项、使用快捷键Ctrl+S、或者单击“保存”按钮来完成。
9. 导出模型,这可以通过选择“文件”菜单中的“导出”选项、使用右键菜单或者使用Simulink工具箱中的其他导出工具来完成。
以上是Simulink工具箱的基本操作流程,用户可以根据实际需求进行相应的操作和设置。
Simulink使用基本

Simulink使用基本Simulink是一种功能强大的图形化建模和仿真环境,用于分析和设计控制系统。
它是MATLAB的一个扩展工具箱,提供了一种直观和可视化的方法来创建和模拟动态系统模型。
在本文中,我们将介绍Simulink的基本使用方法。
在Simulink中,模型由一个个模块组成,每个模块代表系统的一个部分,例如传感器、执行器、控制器等。
这些模块通过线缆相互连接,以传递信号和数据。
要添加模块到模型中,我们可以在库浏览器中选择合适的模块,然后将其拖动到模型窗口中。
我们还可以使用快捷键B打开库浏览器,并通过栏来快速找到需要的模块。
一旦添加了模块,我们可以使用鼠标点击模块并拖动来改变连接线的位置。
要连接两个模块,只需将鼠标从一个模块上的端口位置拖动到另一个模块上的端口位置。
另外,我们还可以使用连接线工具栏上的线条样式来自定义连接线的样式,例如线的颜色、宽度等。
在进行仿真之前,我们需要设置模型的参数。
这包括设置仿真时间、步长和求解器等。
可以在模型窗口的工具栏上找到仿真按钮,点击后将启动仿真过程。
Simulink将按照设定的时间和步长,以及模型中各模块的逻辑,模拟系统的动态行为,并生成仿真结果。
仿真结果可以在仿真数据视图中查看和分析,包括系统的输入、输出、状态变量等。
除了基本的建模和仿真功能,Simulink还提供了许多高级功能和工具,用于系统控制、优化、验证等。
例如,我们可以使用状态流程图(Stateflow)来建模系统的离散事件行为,使用原型环境(Simscape)来建模物理系统,使用代码生成工具箱来生成嵌入式代码等。
Simulink还支持与MATLAB的混合编程,可以通过MATLAB脚本和函数来调用Simulink 模型,并在Simulink模型中使用MATLAB函数。
总结起来,Simulink是一个强大的图形化建模和仿真环境,适用于各种控制系统的分析和设计。
它提供了直观和可视化的方法来创建和模拟系统模型,并提供了丰富的工具和功能来支持系统开发的各个方面。
simulink matlab function模块使用规则
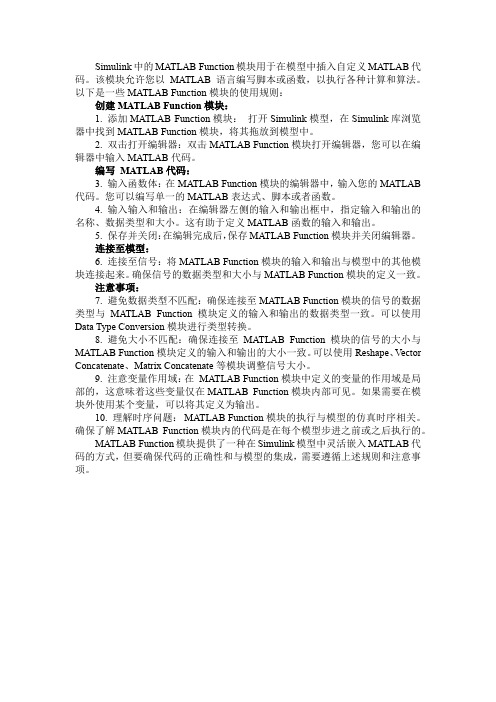
Simulink中的MATLAB Function模块用于在模型中插入自定义MATLAB代码。
该模块允许您以MATLAB语言编写脚本或函数,以执行各种计算和算法。
以下是一些MATLAB Function模块的使用规则:创建MATLAB Function模块:1. 添加MATLAB Function模块:打开Simulink模型,在Simulink库浏览器中找到MATLAB Function模块,将其拖放到模型中。
2. 双击打开编辑器:双击MATLAB Function模块打开编辑器,您可以在编辑器中输入MATLAB代码。
编写MATLAB代码:3. 输入函数体:在MATLAB Function模块的编辑器中,输入您的MATLAB 代码。
您可以编写单一的MATLAB表达式、脚本或者函数。
4. 输入输入和输出:在编辑器左侧的输入和输出框中,指定输入和输出的名称、数据类型和大小。
这有助于定义MATLAB函数的输入和输出。
5. 保存并关闭:在编辑完成后,保存MATLAB Function模块并关闭编辑器。
连接至模型:6. 连接至信号:将MATLAB Function模块的输入和输出与模型中的其他模块连接起来。
确保信号的数据类型和大小与MATLAB Function模块的定义一致。
注意事项:7. 避免数据类型不匹配:确保连接至MATLAB Function模块的信号的数据类型与MATLAB Function模块定义的输入和输出的数据类型一致。
可以使用Data Type Conversion模块进行类型转换。
8. 避免大小不匹配:确保连接至MATLAB Function模块的信号的大小与MATLAB Function模块定义的输入和输出的大小一致。
可以使用Reshape、Vector Concatenate、Matrix Concatenate等模块调整信号大小。
9. 注意变量作用域:在MATLAB Function模块中定义的变量的作用域是局部的,这意味着这些变量仅在MATLAB Function模块内部可见。
simulink 的用法

simulink 的用法
Simulink是一种图形化建模和仿真环境,用于设计、建模和仿真动态系统。
它是MATLAB软件的一部分,提供了一种直观的方法来构建和模拟各种系统,包括控制系统、通信系统、图像处理系统等。
Simulink的用法包括以下几个步骤:
1.打开Simulink:使用MATLAB软件打开Simulink工具包,或者直接在MATLAB命令窗口中输入"simulink"打开。
2.创建模型:在Simulink界面上使用不同的模块和线段,构建系统模型。
模块可以代表各种组件,如传感器、控制器、执行器等,线段则表示信号和数据流。
3.连接模块:使用适当的线段连接不同的模块,建立模型中各个组件之间的数据流和控制逻辑。
4.参数设置:对模型中的各个模块进行参数设置,以确保其行为与实际系统相符。
5.仿真运行:运行模型进行仿真,观察系统的动态行为和输出结果。
可以通过修改模型参数、调整模型结构来进一步优化和改进系统设计。
除了以上基本用法,Simulink还提供了许多高级功能,如模型验证、优化设计、代码生成等。
模型验证功能可以检测和解决模型中的错误和问题。
优化设计功能可以通过自动搜索和调整模型参数,实现系统性能的最优化。
代码生成功能可以将Simulink模型转换为C代码或其他可执行文件,以便在嵌入式系统中进行实时部署。
总的来说,Simulink提供了一种直观的图形化建模方法,将系统设计过程可视化,使得系统建模和仿真更加简单和高效。
MATLAB中SIMULINK常用命令表
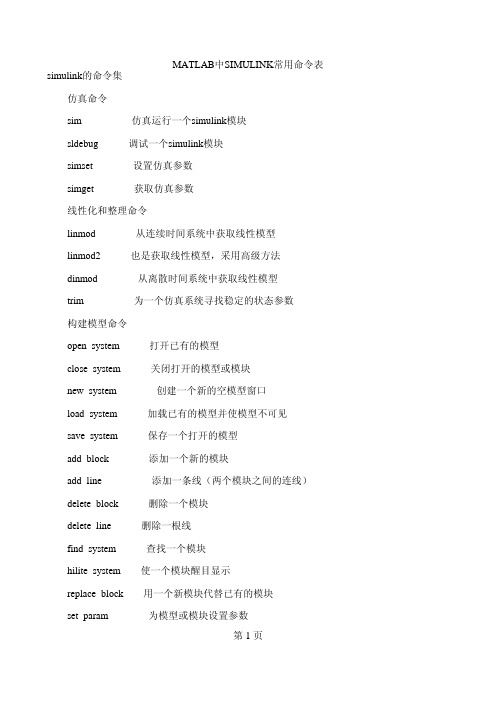
simulink的命令集 仿真命令 sim 仿真运行一个simulink模块 sldebug 调试一个simulink模块 simset 设置仿真参数 simget 获取仿真参数 线性化和整理命令 linmod 从连续时间系统中获取线性模型 linmod2 也是获取线性模型,采用高级方法 dinmod 从离散时间系统中获取线性模型 trim 为一个仿真系统寻找稳定的状态参数 构建模型命令 open_system 打开已有的模型 close_system 关闭打开的模型或模块 new_system 创建一个新的空模型窗口 load_system 加载已有的模型并使模型不可见 save_system 保存一个打开的模型 add_block 添加一个新的模块 add_line 添加一条线(两个模块之间的连线) delete_block 删除一个模块 delete_line 删除一根线 find_system 查找一个模块 hilite_system 使一个模块醒目显示 replace_block 用一个新模块代替已有的模块 set_param 为模型或模块设置参数第 1 页 get_param 获取模块或模型的参数 add_param 为一个模型添加用户自定义的字符串参数 delete_param 从一个模型中删除一个用户自定义的参数 bdclose 关闭一个simulink窗口 bdroot 根层次下的模块名字 gcb 获取当前模块的名字 gcbh 获取当前模块的句柄 gcs 获取当前系统的名字 getfullname 获取一个模块的完全路径名slupdate 将1.x的模块升级为3.x的模块 addterms 为未连接的端口添加terminators模块 boolean 将数值数组转化为布尔值 slhelp simulink的用户向导或者模块帮助 封装命令 hasmask 检查已有模块是否封装 hasmaskdlg 检查已有模块是否有封装的对话框 hasmaskicon 检查已有模块是否有封装的图标 iconedit 使用ginput函数来设计模块图标 maskpopups 返回并改变封装模块的弹出菜单项 movemask 重建内置封装模块为封装的子模块 库命令 libinfo 从系统中得到库信息 诊断命令 sllastdiagnostic 上一次诊断信息第 2 页 sllasterror 上一次错误信息 sllastwarning 上一次警告信息 sldiagnostics 为一个模型获取模块的数目和编译状态 硬拷贝和打印命令 frameedit 编辑打印画面 print 将simulink系统打印成图片,或将图片保存为m文件 printopt 打印机默认设置 orient 设置纸张的方向 常用Simulink模块简介 Sources库中模块 Band-LimitedwhiteNoise 给连续系统引入白噪声 ChirpSignal 产生一个频率递增的正弦波(线性调频信号) Clock 显示并提供仿真时间 Constant 生成一个常量值 CounterFree-Running 自运行计数器,计数溢出时自动清零 CounterLimited 有限计数器,可自定义计数上限 DigitalClock 生成有给定采样间隔的仿真时间 FromFile 从文件读取数据FromWorkspace 从工作空间中定义的矩阵中读取数据 Ground 地线,提供零电平 PulseGenerator 生成有规则间隔的脉冲 In1 提供一个输入端口 Ramp 生成一连续递增或递减的信号 RandomNumber 生成正态分布的随机数 RepeatingSequence 生成一重复的任意信号第 3 页 RepeatingSequenceInterpolated 生成一重复的任意信号,可以插值 RepeatingSequenceStair 生成一重复的任意信号,输出的是离散值 SignalBuilder 带界面交互的波形设计 SignalGenerator 生成变化的波形 SineWave 生成正弦波 Step 生成一阶跃函数 UniformRandomNumber 生成均匀分布的随机数 Sink库中模块 Display 显示输入的值 FloatingScope 显示仿真期间产生的信号,浮点格式 Out1 提供一个输出端口 Scope 显示仿真期间产生的信号 StopSimulation 当输入为非零时停止仿真 Terminator 终止没有连接的输出端口 ToFile 向文件中写数据 ToWorkspace 向工作空间中的矩阵写入数据 XYGraph 使用Matlab的图形窗口显示信号的X-Y图 Discrete库中的模块 Difference 差分器 DifferenceDerivative 计算离散时间导数 DiscreteFilter 实现IIR和FIR滤波器 DiscreteState-Space 实现用离散状态方程描述的系统 DiscreteTransferFcn 实现离散传递函数 DiscreteZero-Pole 实现以零极点形式描述的离散传递函数第 4 页 Discrete-timeIntegrator 执行信号的离散时间积分 First-OrderHold 实现一阶采样保持 IntegerDelay 将信号延迟多个采样周期 Memory 从前一时间步输出模块的输入 TappedDelay 延迟N个周期,然后输出所有延迟数据 TransferFcnFirstOrder 离散时间传递函数 TransferFcnLeadorLag 超前或滞后传递函数,主要有零极点树木决定 TransferFcnRealZero 有实数零点,没有极点的传递函数 UnitDelay 将信号延迟一个采样周期 WeightedMovingAverage 加权平均 Zero-OrderHold 零阶保持 Continuous库中的各模块 Derivative 输入对时间的导数 Integrator 对信号进行积分 State-Space 实现线性状态空间系统 TransferFcn 实现线性传递函数 TransferDelay 以给定的时间量延迟输入 VariableTransferDelay 以可变的时间量延迟输入 Zero-Pole 实现用零极点形式表示的传递函数 Discontinuities库中的各模块 Backlash 模拟有间隙系统的行为 Coulomb&ViscousFriction 模拟在零点出不连续,在其他地方有线性增益的系统 DeadZone 提供输出为零的区域 DeadZoneDynamic 动态提供输出为零的区域 HitCrossing 检测信号上升沿、下降沿以及与指定值得比较结果,输出零或一第 5 页 Quantizer 以指定的间隔离散化输入 RateLimiter 限制信号的变化速度 Relay 在两个常数中选出一个作为输出 Saturation 限制信号的变化范围 SaturationDynamic 动态限制信号的变化范围 WraptoZero 输入大于门限则输出零,小于则直接输出 Math库中的模块 Abs 输出输入的绝对值 Add 对信号进行加法或减法运算 AlgebraicConstant 将输入信号抑制为零 Assignment 赋值 Bias 给输入加入偏移量 ComplextoMagnitude-Angle 输出复数输入信号的相角和幅值 ComplextoReal-Image 输出复数输入信号的实部和虚部 Divide 对信号进行乘法或除法运算 DotProduct 产生点积 Gain 将模块的输入乘以一个数值 Magnitude-AngletoComplex 由相角和幅值输入输出一个复数信号 MathFunction 数学函数 MatrixConcatenation 矩阵串联 MinMax 输出信号的最小或最大值 MinMaxRunningResettable 输出信号的最小或最大值,带复位功能 Polynomial 计算多项式的值 Product 产生模块各输入的简积或商第 6 页 ProductofElements 产生模块各输入的简积或商 Real-ImagtoComplex 由实部和虚部输入输出复数信号 Reshape 改变矩阵或向量的维数 RoundingFunction 执行圆整函数 Sign 指明输入的符号 SineWaveFunction 输出正弦信号 SliderGain 使用滑动器改变标量增益 Subtract 对信号进行加法或减法运算 SumofElements 生成输入的和 TrigonometricFunction 执行三角函数 UnaryMinus 对输入取反 WeightedSampleTimeMath 对信号经过加权时间采样的值进行加、减、乘、除运算第 7 页。
simulink调用m文件函数

simulink调用m文件函数
Simulink是一款广泛应用于模拟和设计动态系统的软件工具,可以通过调用M 文件函数来实现更加复杂的系统模拟。
使用Simulink调用M文件函数需要进行以
下步骤:
1. 在Simulink中打开模型,并在模型中添加一个MATLAB Function模块。
2. 在MATLAB Function模块中定义M文件函数,并将其输入输出端口连接到
其他模块。
3. 在模型中添加一个调用该M文件函数的模块,例如Function Caller模块。
4. 在Function Caller模块中配置函数参数,并将其连接到MATLAB Function
模块的输入端口。
5. 运行模型,Simulink将自动调用M文件函数并输出结果。
需要注意的是,在使用Simulink调用M文件函数时,需确保M文件函数已经
被正确定义和保存,并且其输入输出变量与Simulink模型中的变量相匹配。
此外,还需要注意M文件函数的性能和稳定性,以确保系统模拟的精度和可靠性。
simulink调用python程序 -回复

simulink调用python程序-回复Simulink是一个功能强大的图形化编程环境,它允许用户用块图的形式构建模型和系统,并通过模块化的方式进行设计和开发。
Python是一种通用的编程语言,它具有简单易学、灵活高效等特点。
本文将介绍如何在Simulink中调用Python程序,并详细说明每一步的操作。
首先,我们需要安装并配置Python环境。
在Simulink中调用Python程序需要使用到Matlab的Python引擎接口。
首先,确保已经在计算机中安装了Python,并将其添加到环境变量中。
然后,在Matlab中运行以下命令来配置Python环境:pyversion 'path_to_python.exe'这里的"path_to_python.exe"是你计算机中Python的安装路径。
运行命令后,Matlab会将该Python版本设置为默认版本。
接下来,我们需要在Simulink中新建一个模型。
打开Simulink,点击"File"->"New"->"Model"来创建一个空白的模型。
在模型中,我们需要添加一个Python函数块。
在Simulink LibraryBrowser中,展开"Simulink"文件夹,然后拖拽"Subsystem"块到模型中。
双击该块,进入子系统编辑器。
在编辑器中,右键点击并选择"Add"->"Simulink"->"Ports & Subsystems"->"Function-Call Subsystem",将一个函数调用子系统添加到模型中。
在函数调用子系统中,我们需要配置Python函数的输入和输出。
右键点击函数调用子系统,选择"Open"来打开函数调用子系统编辑器。
simulink对外部c代码的调用

simulink对外部c代码的调用Simulink是一个模型驱动的设计工具,它可以帮助工程师快速设计和开发复杂的系统。
在实际应用中,我们可能需要使用到外部的C代码来完成一些功能。
这就需要我们在Simulink中调用外部C代码。
下面我们将详细介绍Simulink如何调用外部C代码。
第1步:编写外部C代码首先,我们需要编写外部的C代码。
这个C代码可以是使用任何C编译器编译生成的库文件,也可以是使用任何开发环境编译出的可执行文件。
在这个外部C代码中,我们需要实现一个函数,该函数可以被Simulink模型调用。
第2步:创建Simulink模型接下来,我们需要在Simulink中创建一个模型。
我们可以通过使用Simulink的图形化界面,将系统中的各个部分分别表示为模块,并将它们组合到一起。
第3步:添加S-Function在Simulink中,我们可以使用S-Function来实现对外部C代码的调用。
因此,我们需要添加一个S-Function。
S-Function是一个特殊的函数块,它允许我们将自己编写的C代码封装在一个Simulink模块中。
第4步:配置S-Function在添加S-Function后,我们需要进行配置。
我们需要指定S-Function 所调用的外部C函数的名称、参数列表和返回值类型。
同时,我们还需要指定S-Function在Simulink中的输入和输出端口。
第5步:连接S-Function在S-Function配置完毕后,我们需要将S-Function与其他Simulink 模块连接起来。
我们可以通过将S-Function连接到其他模块的输入和输出端口来实现数据传输。
第6步:编译模型当我们完成了模型的搭建后,我们需要将模型编译成可执行的代码。
编译器将Simulink模型中的所有组件和外部C代码生成一个可执行文件。
第7步:运行模型当模型被编译成功后,我们就可以运行模型了。
模型会根据其设计的具体功能进行运行,并根据输入和输出端口的数据进行反馈。
MATLABsimulink命令集
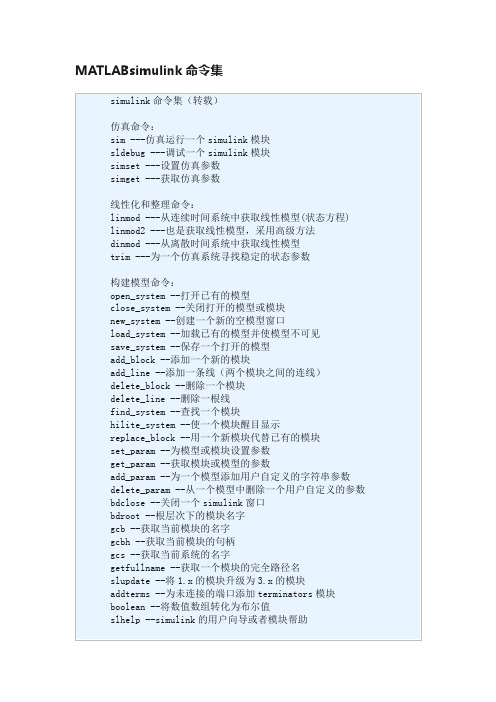
MATLABsimulink命令集simulink命令集(转载)仿真命令:sim ---仿真运行一个simulink模块sldebug ---调试一个simulink模块simset ---设置仿真参数simget ---获取仿真参数线性化和整理命令:linmod ---从连续时间系统中获取线性模型(状态方程)linmod2 ---也是获取线性模型,采用高级方法dinmod ---从离散时间系统中获取线性模型trim ---为一个仿真系统寻找稳定的状态参数构建模型命令:open_system --打开已有的模型close_system --关闭打开的模型或模块new_system --创建一个新的空模型窗口load_system --加载已有的模型并使模型不可见save_system --保存一个打开的模型add_block --添加一个新的模块add_line --添加一条线(两个模块之间的连线)delete_block --删除一个模块delete_line --删除一根线find_system --查找一个模块hilite_system --使一个模块醒目显示replace_block --用一个新模块代替已有的模块set_param --为模型或模块设置参数get_param --获取模块或模型的参数add_param --为一个模型添加用户自定义的字符串参数delete_param --从一个模型中删除一个用户自定义的参数bdclose --关闭一个simulink窗口bdroot --根层次下的模块名字gcb --获取当前模块的名字gcbh --获取当前模块的句柄gcs --获取当前系统的名字getfullname --获取一个模块的完全路径名slupdate --将1.x的模块升级为3.x的模块addterms --为未连接的端口添加terminators模块boolean --将数值数组转化为布尔值slhelp --simulink的用户向导或者模块帮助模块名 (Sinks library) 用途Auto_Scale Graph Scope 在MATLAB自动调整显示比例的图形窗口显示信号Graph Scope 在MATLAB图形窗口显示信号Hit Crossing 在规定值附近增加仿真步数Scope 在仿真过程中显示信号Stop Simulation 当输入不为零时停止仿真To File 把数据输出到文件中To Workspace 把数据输出到工作面上定义的一个矩阵中XY Graph Scope 在MATLAB图形窗口中显示信号的X—Y图模块名 (Discrete library) 用途Discrete-Time Integrator 对一个信号进行离散积分Discrete-Time Limited Integrator 对一个信号进行离散有限积分Discrete State-Space 建立一个离散状态空间模型Discrete Transfer Fcn 建立一个离散传递函数Discrete Zero-Pole 以零极点形式建立一个离散传递函数Filter 建立IIR和FIR滤波器First-Order Hold 建立一阶采样保持器Unit Delay 对一个信号延迟一个采样周期Zero-Order Hold 建立一个采样周期的零阶保持器模块名 (Linear library) 用途Derivative 对输入信号进行微分Gain 对输入信号乘上一个常数增益Inner Product 对输入信号进行点积Integrator 对输入信号进行积分Matrix Gain 对输入信号乘上一个矩阵增益Slider Gain 以滑动形式改变增益State-Space 建立一个线性状态空间模型Sum 对输入信号进行求和Transfer Fcn 建立一个线性传递函数Zero-Pole 以零极点形式建立一个传递函数模块名 (Nonlinear library) 用途Abs 输出输入信号的绝对值Backlash 用放映的方式模仿一个系统的特性Combinatorial 建立一张真值表Coulombic Friction 在原点不连续而在原点以外具有线性增益Dead Zone 提供一个死区Fcn 对输入进行规定的表示Limited Integrator 在规定的范围内进行积分Logical Operator 对输入进行规定的逻辑运算请问:在simulink参数中设置的步长是50e-6,在系统中有一个simout模块向MATLAB中传递数据,但是希望以1e-3的步长获取数据,因该如何设计?在simout模块中直接设定仿真步长是不能运行的。
matlab 将simulink中的数据动态存入工作区的方法 -回复

matlab 将simulink中的数据动态存入工作区的方法-回复如何使用MATLAB将Simulink中的数据动态存入工作区Simulink是一种广泛应用于建模和仿真系统的工具,而MATLAB是一种专门用于数值分析和编程的高级语言。
这两个工具的结合使用可以帮助工程师们更加高效地开发复杂的控制系统。
在Simulink中,数据可通过信号传输来表示系统中的电气、机械或其他物理量。
然而,有时我们希望能够将Simulink中动态生成的数据存入MATLAB工作区,这样就可以在其他MATLAB脚本中使用这些数据进行后续的分析和处理。
在本文中,我将一步一步地说明如何实现这一目标。
首先,我们需要确保Simulink模型中的数据确实是动态生成的。
通常情况下,Simulink模型的输入和输出可以通过信号线进行连接,这些信号线在仿真运行时会动态传递数据。
对于这些信号线上的数据,我们无需额外操作即可在仿真结束后在工作区中得到。
但是,在某些情况下,我们可能需要将Simulink模型中的局部变量或计算结果存入工作区。
对于这种情况,我们需要采取一些额外的步骤。
一种常见的方法是使用MATLAB Function块。
在Simulink模型中添加一个MATLAB Function块,并将需要存入工作区的变量作为输入或输出参数。
然后,我们可以在MATLAB Function块的内部编写MATLAB代码来定义这些变量的计算方法。
这种方法允许我们以Simulink模型的方式建立数值计算,并且可以将计算结果输出到工作区。
此外,我们还可以在MATLAB Function块内部直接调用MATLAB脚本文件,从而更好地组织和复用代码。
另一种方法是使用To Workspace块。
To Workspace块是Simulink中的一个输出块,它可以将信号数据输出到MATLAB工作区或MAT文件中。
在Simulink模型中添加一个To Workspace块,并将需要存入工作区的信号连接到该块的输入端口。
simulink matlab function 使用load函数调用变字符串

simulink matlab function 使用load函数调用变字符串在Simulink中使用MATLAB函数调用变字符串在Simulink中,MATLAB函数可以通过load函数来调用变字符串。
在本文中,我们将深入探讨这一主题,并探讨如何在Simulink中有效地使用load函数来调用变字符串。
1. 了解load函数的基本用法在Simulink中,load函数可以用来加载并读取MATLAB数据文件。
它可以读取以特定格式保存的数据,并将其存储为MATLAB变量。
在调用load函数时,我们需要指定数据文件的路径和名称,然后将读取的数据存储为MATLAB变量。
2. 在Simulink中使用load函数调用变字符串在Simulink模型中,我们可以使用MATLAB函数块来调用load函数。
我们需要在MATLAB函数块中编写相应的MATLAB代码,以便调用load函数并将读取的数据存储为变字符串。
我们可以将该MATLAB函数块添加到Simulink模型中,并将其与其他模块进行连线,以实现数据的传递和处理。
3. 实例分析:在Simulink中通过load函数调用变字符串假设我们有一个数据文件“data.txt”,其中包含了一些字符串数据。
我们希望在Simulink模型中使用load函数来读取这些字符串数据,并进行进一步的处理。
我们需要在MATLAB函数块中编写如下代码:```matlabfunction str_data = load_string_data()data = load('data.txt', '-mat');str_data = data.string_data;end```在这段代码中,我们使用了load函数来读取“data.txt”文件,并将其存储为MATLAB变量“data”。
我们从“data”中提取出字符串数据,并将其存储为变字符串“str_data”。
simulink的matlab function中引用工作空间变量 -回复
simulink的matlab function中引用工作空间变量-回复simulink的matlab function中引用工作空间变量是一种常见的需求。
在simulink的建模过程中,可能会涉及到在matlab function中引用已在工作空间中定义的变量。
这种需求可能源自于需要在工作空间中定义一些初始变量或者在matlab function中进行运算,并将结果存储到工作空间中。
在这篇文章中,我们将一步一步地回答关于如何在simulink的matlab function中引用工作空间变量的问题。
我们将介绍一种简单的方法,该方法基于使用matlab function block以及使用assignin函数。
首先,我们需要创建一个matlab function block。
在Simulink模型中,双击任何一个空白区域来打开库浏览器。
然后,在搜索栏中输入“matlab function”,并将其拖放到模型中。
接下来,在matlab function block的编辑界面中,我们可以在Input区域定义输入参数。
这些参数将允许我们将工作空间中的变量传递给matlab function。
对于每个输入参数,我们需要提供一个参数名称和参数类型。
然后,在Output区域,我们可以定义需要从matlab function返回到工作空间的变量。
对于每个输出变量,我们需要提供一个变量名称和变量类型。
一旦我们定义了输入和输出参数,我们可以在Function区域中编写MATLAB代码。
在这里,我们可以使用输入参数执行所需的操作,并将结果存储在输出变量中。
但是,我们还没有涉及到如何在matlab function中引用工作空间变量。
为了在matlab function中引用工作空间变量,我们将使用assignin函数。
assignin函数允许我们将一个变量分配给指定的工作空间中的一个变量。
在matlab function中,我们可以使用该函数从工作空间中获取变量。
simulink库模板编译

simulink库模板编译
编译Simulink库模板是指将模型文件转换为可执行的代码或二进制文件的过程。
在Simulink中,您可以使用Simulink Coder或Simulink Compiler来编译模型文件。
这些工具可以将Simulink模型转换为C、C++或其他目标语言的代码,以便在嵌入式系统、自动控制系统或其他平台上运行。
在编译Simulink库模板时,您需要首先确保您的模型文件已经完成并且可以成功运行。
接下来,您需要选择合适的编译工具,例如Simulink Coder或Simulink Compiler,并配置编译选项,例如目标语言、目标平台、优化选项等。
然后,您可以启动编译过程,等待编译器生成可执行的代码或二进制文件。
在编译Simulink库模板时,您需要考虑一些因素,例如模型的复杂度、目标平台的硬件限制、性能要求等。
您可能需要进行多次编译和调试,以确保生成的代码符合预期并且能够正确运行。
此外,您还需要注意编译过程中可能出现的错误和警告信息,以及如何解决这些问题。
在编译Simulink库模板时,建议您阅读相关的文档和教程,以便更好地理解编译过程和工具的使用方法。
总的来说,编译Simulink库模板是一个复杂的过程,需要您对Simulink工具和目标平台有深入的了解,以确保生成的代码能够正确运行并满足您的需求。
希望这些信息能够帮助您更好地理解编译Simulink库模板的过程。
simulink调用python程序

simulink调用python程序Simulink是一种常用的工具,用于建模、仿真和分析动力系统。
它可以与多种编程语言集成,包括Python。
在Simulink中调用Python程序可以为我们提供更大的灵活性和功能性。
下面我将详细介绍Simulink如何调用Python程序以及在使用中的一些注意事项。
首先,为了在Simulink中调用Python程序,我们需要安装一个称为MATLAB Engine API for Python的工具包。
它允许MATLAB与Python进行通信,并在Python中调用MATLAB函数。
安装该工具包后,我们可以通过import matlab.engine语句在Python脚本中引入MATLAB引擎。
在Simulink中调用Python程序有两种常用的方法,一种是通过使用MATLAB Function模块,另一种是使用System命令块。
对于使用MATLAB Function模块的方法,我们首先需要将Python程序转换为一个MATLAB函数,然后将该函数放入到MATLAB Function模块中。
打开MATLAB Function模块后,我们需要在"工程路径"对话框中设置Python解释器路径,以及在"设置"对话框中设置函数的输入和输出。
然后,在模块中调用Python程序的方式就变得非常简单了,只需使用命令:output =py.module.functionName(arg1, arg2, ...),其中module是Python程序所在的模块,functionName是要调用的函数名,arg1、arg2等是函数的参数。
对于使用System命令块的方法,我们需要在块的命令窗口中输入Python脚本的路径和参数,然后使用system()命令执行脚本。
这种方法适用于那些比较复杂且需要直接与系统进行交互的Python程序。
在使用Simulink调用Python程序时,有一些需要注意的事项。
simulink中function call

simulink中function call【原创版】目录1.Simulink 简介2.Simulink 中的函数调用3.函数调用的优点4.函数调用的使用方法5.总结正文Simulink 是一个基于图形的仿真环境,主要用于模拟和分析动态系统。
在 Simulink 中,用户可以通过构建块和信号线来描述系统的结构和行为。
在模型构建过程中,有时需要调用其他函数或子模型,以实现更复杂数字信号处理、控制算法等。
这时,函数调用功能就显得尤为重要。
Simulink 中的函数调用是指将一个函数或子模型作为参数传递给另一个函数或子模型。
这种调用方式可以让用户更方便地组织和管理代码,提高模型的可读性和可维护性。
同时,函数调用也有助于实现代码的模块化,降低模型间的耦合度,便于后期的修改和优化。
在 Simulink 中,函数调用的使用方法如下:1.首先,创建一个函数或子模型。
在 Simulink 中,用户可以通过添加“Function”子模块来创建一个函数。
同样,用户也可以创建子模型,然后将其作为函数传递的参数。
2.在需要调用函数或子模型的地方,使用“Call Function”子模块。
这个子模块可以接受一个函数句柄(也称为函数指针)作为输入,该函数句柄指向要调用的函数或子模型。
3.将函数句柄连接到“Call Function”子模块的输入端。
这样,Simulink 就会在运行时调用该函数或子模型,并将结果返回到“Call Function”子模块的输出端。
4.如果需要传递参数,可以在“Call Function”子模块的前面添加适当的输入信号线,将参数值传递给函数或子模型。
同样,也可以在“Call Function”子模块后面添加输出信号线,将函数或子模型的返回值传输到其他地方。
通过以上步骤,用户就可以在 Simulink 中实现函数调用,提高模型的组织和管理水平。
simulink 函数调用拆分块
在Simulink中,如果你有一个函数调用并且想要拆分它,你可以使用几种方法来实现。
以下是一些建议的步骤:
使用子系统:
在Simulink模型中,你可以创建一个子系统来封装你想要拆分的函数调用。
在子系统中,你可以将函数调用的各个部分拆分为单独的块。
使用这种方法,你可以保持主模型的整洁,同时将详细的实现隐藏在子系统中。
使用MATLAB Function块:
如果你有一个复杂的MATLAB函数并且想要在Simulink中拆分它,你可以使用MATLAB Function块。
在MATLAB Function块中,你可以编写MATLAB代码并像在常规MATLAB脚本中一样拆分函数。
这种方法允许你利用MATLAB的编程灵活性,并在Simulink模型中以图形方式表示函数。
手动拆分:
如果你的函数调用包含几个独立的步骤,你可以直接在Simulink中创建相应的块来执行每个步骤。
例如,如果你的函数首先计算一个值,然后对这个值应用一个公式,你可以在Simulink中创建一个块来计算该值,然后创建另一个块来应用公式。
使用模型引用:
如果你有一个大的模型,并希望将其拆分为更小的、更易于管理的部分,你可以考虑使用模型引用。
模型引用允许你创建一个主模型,该模型引用其他较小的模型作为其子模型。
这样,你可以将函数调用拆分为不同的子模型,并在主模型中引用它们。
优化和重构:
在拆分函数调用后,确保测试每个部分以确保它们正常工作。
考虑优化和重构拆分的部分以提高性能和可读性。
simulink c function 使用 -回复

simulink c function 使用-回复Simulink是一种功能强大的可视化建模和仿真工具,用于设计和分析各种控制系统。
Simulink C函数则是Simulink提供的功能之一,它允许用户使用C语言代码来扩展Simulink的功能和灵活性。
本文将详细介绍Simulink C函数的使用,包括其基本原理、编程步骤和示例案例。
首先,让我们来了解Simulink C函数的基本原理。
Simulink C函数允许用户在Simulink模型中插入C语言代码,并将其编译成可执行文件,以实现模型的特定功能或进行高度自定义的计算。
用户可以编写C语言代码来实现各种功能,如数据处理、算法实现、外部接口等。
Simulink C函数通过调用外部编译器将C代码编译为可执行文件,然后在仿真过程中调用这些可执行文件来执行用户定义的功能。
接下来,让我们来详细介绍使用Simulink C函数的步骤。
首先,用户需要创建一个Simulink模型,并将所需的信号和参数定义在模型中。
然后,在模型中插入一个S-Function模块,这是Simulink C函数的主要组成部分。
用户可以在S-Function模块的配置参数中指定要使用的C代码文件,并设置编译选项和其他参数。
接下来,用户需要编写C语言代码来实现所需的功能,并将该代码保存为一个独立的C文件。
然后,用户需要使用适当的C编译器将C代码编译为可执行文件。
最后,用户需要在Simulink 模型中指定编译后的可执行文件的位置,并确保正确配置相关参数和输入输出信号。
完成这些步骤后,用户可以开始仿真并验证模型的功能。
下面我们将通过一个简单的示例来演示Simulink C函数的使用。
假设我们需要实现一个模型,该模型接收一个输入信号,并根据该信号的数值进行特定的计算。
为了实现这个功能,我们将创建一个Simulink模型,并在模型中插入一个S-Function模块。
我们将创建一个名为"myFunction.c"的C语言代码文件,并在其中编写逻辑来实现该计算。
simulink matlab function模块使用规则

simulink matlab function模块使用规则Matlab函数模块是Simulink中的一个重要组件,它可以用于在Simulink模型中定义自定义的算法、函数或子系统。
本文将介绍Simulink中Matlab函数模块的使用规则,以帮助读者更好地使用和理解这个功能。
首先,要使用Matlab函数模块,我们需要在Matlab环境中创建一个.m文件,并在其中编写我们需要的算法或函数。
这个.m文件可以包含任何合法的Matlab代码,例如变量声明、算术运算、条件语句、循环语句等等。
在编写代码时,请确保代码的正确性,并进行必要的测试和调试。
当我们完成代码编写后,我们可以将这个.m文件保存在指定的文件夹中,以便在Simulink中使用。
在创建Simulink模型时,我们可以在Library Browser(库浏览器)中找到名为"User-Defined Functions"(用户定义函数)的库。
将Matlab函数模块拖动到模型中,并双击打开。
在Matlab函数模块的参数设置中,我们可以定义输入和输出的端口。
默认情况下,Matlab函数模块会根据.m文件中定义的输入和输出自动创建相应的端口。
我们可以根据需要对端口进行重命名、重新排序,或者手动添加删除端口。
在Matlab函数模块的属性设置中,我们可以指定所使用的.m文件的路径。
点击"Browse"(浏览)按钮,选择保存好的.m文件所在的文件夹即可。
如果.m文件发生了改动,我们需要点击"Update Diagram"(更新图纸)按钮,以使Simulink中的模块更新为最新的代码。
请注意,在Matlab函数模块中使用的算法或函数应该具有固定的输入输出关系。
也就是说,相同的输入应该产生相同的输出。
这是为了确保模型的可重现性和可维护性。
在设计和使用Matlab函数模块时,我们应该遵循这一原则,确保模型的正确性和稳定性。