基于大疆无人机测绘产品制作方法研究
大疆无人机测绘原理
大疆无人机测绘原理
测绘作为一个基础性行业,从大比例的地形图,到铁路网、公路网的分布再到互联网地图,测绘的身影无处不在。
国防、能源、农业、林业、水利电力、城市建设、交通规划、土地管理等都离不开测绘。
测绘行业同时也是艰苦行业,尽管测绘仪器与软件近年来经历了多次更新换代,新技术层出不穷,利用全站仪与RTK,仍然免不了大量的外业测量,还是需要通过脚步采集地形数据。
众多的新技术中,无人机航测受到了最多的关注。
大疆无人机测绘通过无人机低空摄影获取高清晰影像数据生成三维点云与模型,实现地理信息的快速获取。
效率高,成本低,数据准确,操作灵活,可以满足测绘行业的不同需求。
大大地节省了测绘人员野外测绘的工作量,取得了巨大的社会和经济效益。
大范围航测虽然早已用上油动、电动固定翼飞机,但是专业的测绘无人机由于价格过于昂贵,大型测绘单位通常只能单个采购,在实际项目中也只是作为辅助,难以发挥无人机的集群效应。
中小型测绘企业难以负担测绘无人机高额的费用与使用风险,测绘行业的无人机应用一直都无法大范围铺开。
利用无人机进行航测制图的方法与技巧
利用无人机进行航测制图的方法与技巧随着科技的不断发展,无人机作为一种重要的航空设备,被广泛地应用于各个领域。
其中,利用无人机进行航测制图,已经成为一种行之有效的方法。
本文将从无人机航测制图的基本概念、设备选择、技术流程和常见问题等方面展开,帮助读者更好地了解和掌握这一技术。
第一部分:无人机航测制图的基本概念1. 什么是无人机航测制图?无人机航测制图是利用无人机搭载的航空摄影测量仪器,通过采集航测影像和相关的地理信息数据,生成地表三维模型和制图成果的过程。
它可以用于土地测量、地质勘察、城市规划、资源管理等领域。
2. 为什么选择无人机航测制图?相比传统的航测方法,无人机航测制图具有成本低、操作灵活、数据处理速度快等优势。
无人机的低空飞行能够提供高分辨率的影像数据,并且可以在复杂地形和狭小空间中进行作业,极大地提高了制图的准确性和效率。
第二部分:无人机航测制图的设备选择1. 选择无人机在选择无人机时,需要根据航测任务的需求和预算等因素进行综合考虑。
一般情况下,需要选择具有良好操控性和稳定性的无人机,同时考虑其承载能力和续航能力。
2. 选择航测影像设备航测影像设备是无人机航测制图的核心组成部分。
一般情况下,可以选择搭载全球定位系统(GPS)和惯性导航系统(IMU)的数码相机或者热红外相机等设备。
根据实际需求,可以选择不同的分辨率和光谱范围的相机。
第三部分:无人机航测制图的技术流程1. 准备工作在实施航测任务之前,需要进行详细的准备工作。
包括确定航测区域和任务范围,计算飞行高度和间隔,制定飞行计划,并进行相关设备的检查和准备。
2. 飞行任务执行根据事先设计好的飞行计划,进行无人机航测任务的执行。
在飞行过程中,需要注意设备的正常运行,保持飞行轨迹的稳定,并及时记录关键数据。
3. 数据处理与制图飞行任务结束后,需要对采集到的数据进行处理。
一般包括数据的校正、配准、三维重建和纠偏等过程。
根据需求可以使用不同的软件和算法进行数据处理,最终生成航测制图的结果。
无人机测绘技术及应用创新创业课程标准-9.26
学生完成本课程的学习后,应掌握无人机航测飞行的相关理论、基本方法,能够利用大 疆“消费级”系列无人机完成相应的项目实践工作,并初步具备技术创新意识,了解创业实 践应用,为发展职业能力奠定良好的基础。课程培养具有坚实的无人机技术基础、摄影测量 理论基础,掌握利用无人机进行航测数据采集生成的基本技能,能在测绘、地质、地理、国 土资源与环境、农林、气象、电力、城市规划等领域从事无人机摄影测量及其应用领域的高 级技术应用性专门人才。
无人机摄 1.无人机航测基本理论
2. 掌握共线方程基础理论,
5 影测量基 2.共线方程
6 学时
了解共线方程的应用
础理论 3.立体量测、像控点布设
3. 掌握像控点布设方法
1 .无人机航测航线布设计 1.学会计算无人机航测航
无人机航 算
高、旁向重叠、航向重叠计
6 测及正射 2 .无人机航测地面站介绍 算
无人机操 3.多旋翼无人机系统的组成
控技术 4.无人机操控
4.熟悉无人机飞行安全
5. 无人机飞行安全
无人机空 1.全景影像基础知识
中全景影 2.全景影像数据采集技术 1、掌握全景影像基础
4
像数据采 3.全景影像拼接技术
2、掌握全景影像制作方法
集及制作 4.全景影像发布与应用
2 学时
1.无人机摄影测量基础知识
据采集及
三维模型 集
据采集
4
生产
3.无人机倾斜摄影数据处 3.掌握无人机倾斜摄影数据处
理与三维模型生产
理与三维模型生产
基于无人 1.基于正射影像与 DSM 的 1.掌握基于正射影像与 DSM 的
机航测数 数字线化图生产技术
数字线化图生产技术
大疆产品开发流程
大疆产品开发流程一、需求调研与定义在产品开发的初期阶段,大疆科技会进行广泛的市场调研,了解用户需求和市场趋势。
基于这些调研结果,团队会明确产品的定位和目标,对产品进行需求定义。
这一阶段的关键是准确捕捉用户需求和市场动态,为后续的开发工作提供明确的方向。
二、概念设计与验证在需求调研和定义完成后,大疆科技会进行概念设计。
团队会结合市场需求和技术实施的可行性,提出多个概念设计方案。
通过模拟、仿真等手段进行验证,筛选出最具有可行性和市场竞争力的概念方案。
三、详细设计与开发在概念设计方案确定后,大疆科技会进行详细设计和开发工作。
团队会进行产品结构设计、电路设计、软件开发等工作,并制定相应的规范和标准。
这一阶段需要高度的专业知识和技术能力,确保产品能够满足用户需求,并具备良好的性能和质量。
四、原型制作与测试在详细设计和开发完成后,大疆科技会制作产品的原型,并进行各项测试。
这些测试包括功能测试、性能测试、可靠性测试等,以确保产品的稳定性和可靠性。
通过不断的优化和改进,确保产品能够达到预期的性能指标和质量要求。
五、批量生产与上市经过原型制作和测试验证后,大疆科技会进行批量生产,并准备产品上市。
这一阶段需要严格控制生产流程和质量标准,确保产品能够按时交付,并具备一致的性能和质量。
同时,团队还会进行市场推广和宣传,以确保产品能够得到市场认可和用户接受。
六、售后服务与持续改进在产品上市后,大疆科技会提供全面的售后服务,并持续改进产品。
团队会收集用户的反馈和需求,进行产品的持续改进和优化。
同时,大疆科技会及时响应用户的问题和需求,提供及时的技术支持和解决方案,以提高用户的满意度和忠诚度。
大疆产品的开发流程包括需求调研与定义、概念设计与验证、详细设计与开发、原型制作与测试、批量生产与上市、售后服务与持续改进等环节。
这一流程经过多年的实践和不断的改进,为大疆科技的产品开发提供了有效的指导和保障。
大疆科技凭借其严谨的开发流程和卓越的技术能力,不断推出具有创新性和竞争力的产品,赢得了全球用户的认可和信赖。
无人机航空测绘及后期制作课件:DEM生成

可以缩放DEM
DEM生成
DEM查看
用鼠标选中作业区中的DEM图像,按住鼠右移动。如果同时
按住CTRL键,则前后移动DEM
谢谢!
无人机飞控系统
DEM生成
DEM查看
单击DEM查看界面上的“视图”菜单,可对弹出的
菜单项进行查看设置
DEM生成
DEM查看
①旋转DEM
用鼠标选中作业区中的DEM图像,然后按住鼠标左键
上下左右移动,可以实现DEM的前后上下左右方向的
旋转
DEM生成
DEM查看
②缩放DEM
用鼠标选中作业区中的DEM图像,滚动鼠标中键,
单击 加入转化成DXF格式的特征线文件,点击
图标,即可生成相应的DEM
DEM生成
自动生成
①在工程浏览窗口中选中一个立体像对
②单击工程浏览窗口上的生成DEM的图标 ,或在
右键菜单中单击“新建DEM”选项
③单击 图标,系统自动完成DEM生成。并将处理
过程和结果显示在主界面中下部的“输出窗口”中
④单击 图标,即可显示自动生成的DEM
选择文件菜单下的“打开DLG数据文件”命令
点击工具栏的打开按钮,打开一个*.gdb数据库
• 新建DLG文件
选择文件菜单下的“新建DLG数据文件”命令,系统
弹出一个对话框。在该对话框的文件名文本框中输入
文件名,点击“保存”按钮
特征线采集
FeatureOne采集步骤
②设置工作区属性
重新设置具体操作如下:选择“工作区”菜单下的“工作
区属性”命令,选择子菜单中的“手工设置边界”命令
特征线采集
FeatureOne采集步骤
完成以上操作,便可打开或新建一个工作区开始具体的
无人机测绘项目设计

项目名称: 微型无人机低空摄影测量 项目单位:
编制单位:
编 制 人:
编制日期:
年月日
审批负责人:
审批日期:
年月日
微型无人机低空摄影测量系统 项目方案
一、 项目简述 随着我国整体信息科学和相关应用的快速发展,我国各行业对空间数据
的需求也急剧增长。但目前,对于空间数据,特别是高分辨率空间数据的获 取渠道仍然局限于外界采购,例如国外遥感卫星影像、大飞机航拍等,造成 了数据重复采集,资金耗费等结果,同时上述空间数据供给在时效性和灵活 性也远不能满足实际需求。为了更有效、更自主、更廉价地的进行高分辨率 空间数据采集,经过调查研究,计划实施此《微型无人机低空摄影测量系统》 项目。
全自主巡航飞行、全自主“一键式”回收、点哪飞哪、就地盘旋;完全夜 航功能; ¾ 用户可设置的安全保护功能;电压监控、发动机转速监控,发动机灭车、 意外安全保护; ¾ 支持实验室模拟飞行功能,足不出户预先判断飞行效果; ¾ 9 通道舵机输出,支持定时、定距控制拍照任务舵机动作,支持开伞、切 伞、开舱、抛撒等舵机动作; ¾ 支持完全副翼转弯、压坡度横滚转弯,支持常规、V 尾、H 尾、三角翼等 各种布局; ¾ 搭载在系留平台高空悬浮 7 天考核,经过军品装备验收程序严格考核,高 低温、振动、冲击、电磁兼容等各项指标符合国军标。
¾ 实时显示 3 轴加速度值、3 轴陀螺值等 IMU 传感器信息; ¾ 7—20V 宽电压输入,12 位 A/D 采集电压监控; ¾ 多种 PID 组合控制算法,256~1024 个任务航路点,12 个制式航线,航段
速度、高度、半径和任务可单独设置; ¾ “傻瓜式”操作,多种飞行控制方式:全自主弹射起飞、全自主手掷起飞、
据快速处理、应用分析以及与其他数据源的快速融合处理功能。 3)多种任务设备的应用拓展能力
无人机航测技术在土石方测量项目中的应用研究——以大疆悟2无人
区域治理前沿理论与策略无人机航测技术在土石方测量项目中的应用研究——以大疆悟2无人机系统为例范鲁山 阚堂凤 韩涛日照市土地储备开发集团有限公司,山东 日照 276800摘要:研究利用大疆悟2无人机+禅思X7云台系统航摄法测量土石方的可行性,由日照市土地储备开发集团有限公司出资采购相关设备,通过土石方测量项目开展新技术应用研究工作,通过与其他测量手段进行综合对比,并通过实例项目验证结果,得出大疆悟2无人机+X7云台系统航摄法测量土石方技术具备推广应用优势。
关键词:无人机航测;土石方;应用研究;大疆悟2;云台一、大疆悟2无人机航测系统组成大疆悟2无人机产品定位为专业级,主要由飞行器、遥控器、云台、电源、IPAD平板电脑、禅思X7相机组成。
1 飞行器系统大疆悟2无人机飞行器1个;遥控器1个;智能飞行电池6个;充电器1个;充电管家1个;电源线1根;双A口USB线1根;SD 卡1个;视觉标定板1个;云台减震球1套;快拆桨桨座套件;外包装箱;电池保温贴纸;物品清单。
2 航拍摄像系统云台1个;禅思X7相机1个;Zenmuse X7 DL-S 16mm F2.8NDASPH 镜头1个;IPAD 平板电脑1个。
3 数据处理系统品牌DELL T7910电脑工作站:Intel Xeon E-2603v4*2/16G/256G*2+1T7.2K/ DVDRW/P4000;显示器:SE2417H显示器。
数据处理软件: Pix4Dmapper软件 、点云数据处理软件Geomagic studio 2014、土方计算软件南方CASS10.0网络版。
二、无人机航摄技术的具体应用在日照市土地储备集团国丰远大土石方测量项目中,成功应用了大疆悟2无人机系统采集数据,项目具体技术路线图如下图所示:1 现场踏勘与规划飞行计划根据需求方提供的土石方测量项目范围线,利用苹果PAD 内置高德地图制定航飞计划,必要时到土石方现场进行踏勘,排除超高建筑物、构筑物对无人机飞行高度的影响。
基于无人机测量的地籍测绘技术探究
- 94 -工 程 技 术随着近期经济建设的不断推进,我国对土地资源的利用更加多元化,而土地权属结构和利用布局也在不断变化中,通过开展土地调查工作,能够实现土地信息建档,并在大数据、信息化技术的支持下,形成土地资源专属数据库,对国家当代土地管理工作意义重大,并保障国土资源的管理的安全性与可靠性。
对此,地籍测绘是土地调查工作的重要一环,指的是采用测绘技术了解国有或集体土地权属、位置、用途、界址等基本情况的调查活动,但是,在以往地籍测绘工作中,常使用RTK、全站仪等测绘手段,并不满足高精度、高效率的地籍测绘需求。
因此,建立以无人机测量为核心的地籍测绘技术体系,显著提高地籍测绘工作质量,推动土地调查工作的创新发展。
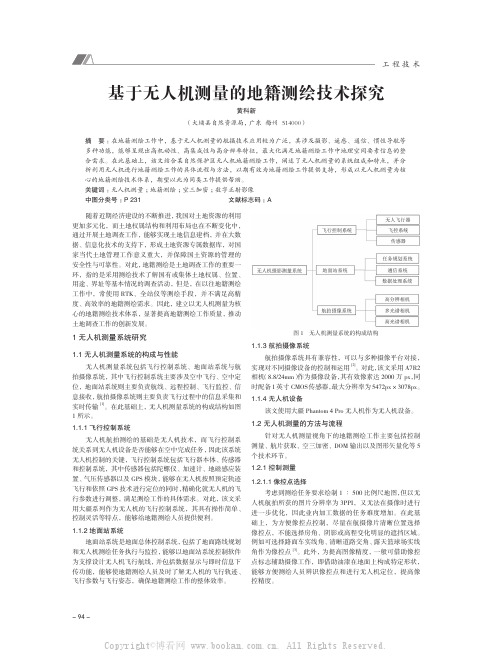
1 无人机测量系统研究1.1 无人机测量系统的构成与性能无人机测量系统包括飞行控制系统、地面站系统与航拍摄像系统,其中飞行控制系统主要涉及空中飞行、空中定位,地面站系统则主要负责航线、远程控制、飞行监控、信息接收,航拍摄像系统则主要负责飞行过程中的信息采集和实时传输[1]。
在此基础上,无人机测量系统的构成结构如图1所示。
1.1.1 飞行控制系统无人机航拍测绘的基础是无人机技术,而飞行控制系统关系到无人机设备是否能够在空中完成任务,因此该系统无人机控制的关键,飞行控制系统包括飞行器本体、传感器和控制系统,其中传感器包括陀螺仪、加速计、地磁感应装置、气压传感器以及GPS 模块,能够在无人机按照预定轨迹飞行和依照GPS 技术进行定位的同时,精确化就无人机的飞行参数进行调整,满足测绘工作的具体需求。
对此,该文采用大疆系列作为无人机的飞行控制系统,其具有操作简单、控制灵活等特点,能够给地籍测绘人员提供便利。
1.1.2 地面站系统地面站系统是地面总体控制系统,包括了地面路线规划和无人机测绘任务执行与监控,能够以地面站系统控制软件为支撑设计无人机飞行航线,并包括数据显示与即时信息下传功能,能够使地籍测绘人员及时了解无人机的飞行轨迹、飞行参数与飞行姿态,确保地籍测绘工作的整体效率。
无人机测绘方案课程设计
无人机测绘方案课程设计一、课程目标知识目标:1. 让学生了解无人机的基本构造、工作原理及其在测绘领域的应用。
2. 使学生掌握无人机测绘的基本流程、操作方法和数据处理技巧。
3. 帮助学生理解无人机测绘数据的误差来源及解决方法。
技能目标:1. 培养学生操作无人机进行测绘数据采集的能力。
2. 提高学生运用测绘软件处理数据、生成地图和三维模型的能力。
3. 培养学生分析、解决无人机测绘过程中遇到的问题的能力。
情感态度价值观目标:1. 培养学生对无人机测绘技术的兴趣,激发学生探索新技术的热情。
2. 培养学生团队协作、共同解决问题的精神,增强合作意识。
3. 引导学生关注无人机测绘技术在现实生活中的应用,认识到科技对社会的贡献。
课程性质分析:本课程为实践性较强的学科课程,结合地理信息系统、遥感技术等多学科知识,以无人机测绘技术为载体,培养学生实际操作和解决问题的能力。
学生特点分析:学生处于高中阶段,具有一定的地理、物理知识基础,对新鲜事物充满好奇,具备一定的动手能力和探究精神。
教学要求:1. 理论与实践相结合,注重培养学生的实际操作能力。
2. 创设实际情境,让学生在实践中发现问题、解决问题。
3. 关注学生的个体差异,因材施教,提高学生的综合素质。
二、教学内容1. 无人机基础知识:包括无人机的基本构造、分类、飞行原理等,关联教材中无人机相关章节。
2. 无人机测绘原理:介绍无人机测绘的基本原理、设备选择、参数设置等,结合教材中测绘技术相关内容。
3. 测绘数据处理:讲解无人机测绘数据的采集、预处理、校正、拼接等过程,涉及教材中地理信息系统数据处理部分。
4. 实际操作技巧:教授无人机操作、飞行规划、数据采集等实际操作技巧,以教材中实践操作案例为参考。
5. 误差分析及解决方法:分析无人机测绘中可能出现的误差来源,探讨解决方法,结合教材中测绘误差处理内容。
6. 无人机测绘应用案例:介绍无人机测绘在地理、环境、规划等领域的实际应用,参照教材中相关案例。
基于无人机技术的自动航拍与地图制作系统

基于无人机技术的自动航拍与地图制作系统自动航拍与地图制作系统是基于无人机技术的一项创新应用。
随着无人机技术的快速发展,其在航拍和地图制作领域的应用也日益广泛。
本文将探讨基于无人机技术的自动航拍与地图制作系统的原理、应用和潜在的发展前景。
一、自动航拍与地图制作系统的原理自动航拍与地图制作系统利用无人机技术实现全自动化、高效率的航拍和地图制作过程。
其基本原理可以分为三个步骤:航迹规划、航拍采集和地图生成。
首先,系统通过预先设置好的航迹规划算法,确定无人机的航行路线和拍摄点位。
航迹规划算法可以根据用户需求、场地条件和无人机性能等因素进行灵活调整,以确保拍摄到关键区域的高质量航拍数据。
其次,无人机按照航迹规划的路线飞行,并利用内置的传感器(如GPS、惯性导航系统和摄影测量仪)实时采集航拍数据。
这些数据包括航拍图像、位置坐标、飞行高度等信息,用于后续地图生成过程。
最后,通过图像处理和地理信息系统(GIS)技术,将航拍数据转化为高精度的地图产品。
这一过程包括图像拼接、地物提取、坐标转换和地图绘制等步骤,最终生成高质量的地图产品。
二、自动航拍与地图制作系统的应用自动航拍与地图制作系统具有广泛的应用价值和潜力。
以下是几个典型的应用场景:1. 地形测量和制图:自动航拍与地图制作系统可以快速获取地形数据,包括地貌、地貌特征和地面高程等信息。
这对于地质勘探、土地利用规划和灾害预警等领域具有重要意义。
2. 城市规划和基础设施建设:通过航拍城市区域,可以获得大范围、高精度的城市地图。
这对于城市规划、道路建设、交通管理和环境保护等领域提供了重要的数据支持。
3. 农业精准管理:自动航拍与地图制作系统可以获取农田的土壤质量、作物生长状态和病虫害分布等信息。
这对于农业管理、精准施肥和作物防病虫害有着重要的指导意义。
4. 旅游推广和自然资源保护:通过航拍景区和自然保护区,可以制作出真实、精美的地图产品,用于旅游推广和自然资源保护等方面。
无人机测绘设计施工方案

无人机测绘设计施工方案1. 引言无人机测绘作为一种现代化的测绘方式,具有快速、高效、精确的优势,已逐渐在各个领域得到广泛应用。
本文将介绍无人机测绘设计施工方案,包括设备选择、测绘流程和数据处理等内容,为相关从业者提供参考和指导。
2. 设备选择2.1 无人机选择选择合适的无人机是实施无人机测绘的基础。
根据测绘任务的需求,可以选择不同类型的无人机。
一般情况下,无人机应具备以下特点:•航程和续航能力较长,能够覆盖较大的测绘区域;•搭载高分辨率相机或激光雷达等测绘设备,能够获取高质量的数据;•具备稳定的飞行性能和可靠的遥控系统,能够保证测绘任务的安全完成。
2.2 摄像机选择无人机测绘的核心任务是获取地表特征的图像数据,因此选择合适的摄像机至关重要。
一般而言,可根据以下几个因素进行选择:•分辨率:摄像机的分辨率决定了所获取图像的精度,一般推荐选择分辨率较高的摄像机;•焦距范围:根据测绘区域的大小和特点,选择合适的焦距范围,以保证图像的全面覆盖;•传感器类型:根据具体任务需求,可选择RGB摄像头、红外摄像头等不同类型的传感器。
3. 测绘流程3.1 任务规划在进行无人机测绘之前,需要做好详细的任务规划。
主要包括确定测绘区域的范围和边界,制定飞行路径和航点布置方案,制定数据采集要求和时间计划等。
3.2 前期准备在测绘前,需要进行一系列的前期准备工作。
首先,需对无人机进行系统检查和校准,确保其飞行性能和测绘设备的正常运作。
其次,需要检查所需材料和工具的携带情况,确保备齐,并做好相应的记录。
3.3 测飞实施根据任务规划确定的飞行路径和航点布置方案,进行测飞实施。
在测飞过程中,应注意以下几点:•飞行安全:确保无人机的飞行安全,遵守相关的航空法规;•数据采集:按照任务要求,进行图像或激光雷达数据的采集;•航点调整:根据实际情况,在飞行中可以适当调整航点或航线,以保证数据的完整性和准确性。
3.4 数据处理测飞结束后,需要对采集到的数据进行处理和分析。
大疆非重复扫描技术实现方法

大疆非重复扫描技术实现方法全文共四篇示例,供读者参考第一篇示例:大疆无人机公司是全球领先的无人机制造商,其研发的非重复扫描技术在无人机领域具有里程碑意义。
该技术的实现方法包括多方面内容,下面将着重介绍其原理、技术实现步骤和应用前景。
一、原理大疆无人机利用非重复扫描技术,通过优化飞行路径和图像获取方式,实现对地面目标的高效覆盖和成像。
该技术基于遗传算法和计算机视觉技术,能够在保证图像覆盖率的前提下,最大程度地减少重复扫描,提高数据采集的效率和精度。
非重复扫描技术的实现原理主要包括路径规划、轨迹优化和数据处理三个方面。
二、技术实现步骤1. 路径规划:无人机在飞行前需要规划航线,根据地理信息系统(GIS)提供的地图数据和目标区域的特征,利用遗传算法等优化算法进行路径规划,确保无人机的航线覆盖率和航迹的合理性。
2. 轨迹优化:在飞行过程中,无人机需要通过自主导航系统实时调整飞行轨迹,避开障碍物和重复扫描区域,保证航迹的连续性和完整性。
结合计算机视觉技术实现对地面目标的精确定位和跟踪。
3. 数据处理:无人机通过搭载的高分辨率相机或LiDAR传感器获取地面目标的图像数据和三维点云数据,利用图像处理和数据分析算法进行图像拼接、重叠区域的去重和数据融合,生成高精度的地图和数字模型。
三、应用前景1. 地图测绘:非重复扫描技术能够提高无人机航测的效率和精度,广泛应用于地理信息采集、土地利用规划、城市规划等领域。
2. 农业植保:通过无人机搭载的多光谱相机和红外传感器,实现农田的高效扫描和监测,为农业生产提供精准的数据支持。
3. 建筑与工程:利用无人机实现对建筑工地和工程项目的实时监测和数据采集,提高工程管理和效率。
4. 环境监测:结合大数据分析和人工智能技术,利用无人机进行环境监测和资源调查,为环保和自然资源管理提供数据支持。
大疆无人机的非重复扫描技术是无人机领域的重要创新之一,其实现方法涉及路径规划、轨迹优化和数据处理等多个环节,具有广泛的应用前景。
无人机三维测绘关键技术及应用研究

无人机三维测绘关键技术及应用研究摘要:无人机三维测绘技术融合了北斗(GPS)、通信、影像处理等不同技术,通过无人机搭载一台自带减震、优化参数的五镜头相机,拍摄高清影像,经过软件集群处理生产三维模型,在室内基于三维模型生产数字线划图,从而满足各行业对数据的需求。
文主要研究无人机在三维立体测绘中涉及的关键技术,并进而推进无人机测绘新技术应用推广。
关键词:无人机;倾斜摄影;数字城市引言无人机凭借其机动灵活、作业范围广、成低等特点,在各领域的应用越来越广泛。
与传统测绘手段相比,无人机三维测绘技术可以快速、精准地获取地表信息,从而大大减轻了工作的强度。
此外,利用无人机测绘生成的高精度三维模型,在各行业领域中作为一种更加立体直观的场景进行展示,从而进一步扩大了无人机的应用范围,使其在测绘、国土、矿山、林业、文物保护、数字城市等领域得到广泛的应用。
1关于无人机测绘技术随着科学技术的不断发展,越来越多先进的技术应用于测量领域。
无人机摄影测量成为一种新型的测绘手段,无人机设备具有续航时间长、消耗成低、机动灵活等实际特点。
从具体组成上来看,无人机低空航摄系统一般有地面系统、飞行平台、传感器、数据处理等四部分组成。
地面系统包括作业指挥、后勤保障等车辆;飞行平台包括无人机飞机、维护系统、通讯系统等;影像获取系统包括电源、GPS程控导航系统等;数据处理系统包括纠正系统、立体测图系统等。
从无人机技术发展历程来看,在2012年以后无人机技术发展迅速。
一些单位根据单位的实际情况,将无人机技术应用于航空摄影测量过程中。
在这一时期,旋翼型无人机可搭载激光三维扫描雷达问世,该种设备的问世能够实现小面积数字测量。
测绘软件厂商根据测量需要,积极开发自动化无人机航测数据处理软件,通过航测速率软件的有效开发,进一步提升测绘的精准程度。
在无人机技术不断发展过程中,越来越多的单位或者企业意识到无人机测绘测量在遥感测绘领域中具有重要的应用价值。
在无人机设备使用过程中,可以搭载多种较为先进的遥感设备,如高分辨率CCD数码相机、激光扫描仪,轻型光学相机等。
大疆Phantom4 RTK无人机航测在工程中的应用
qiyekejiyufazhan【摘要】文章结合工程实例,介绍采用Phantom4RTK 无人机结合中海达UAV-PPK 套装进行低空航测作业,通过UAV-PPK 解算提供稳定可靠的地面基站静态数据,获取更高精度的POS 数据,提高“空三”加密解算质量,从而高效地提升航测成果精度,满足相应比例尺地形图精度要求。
【关键词】Phantom4RTK 无人机;UAV-PPK ;低空航测;“空三”加密;航测精度;比例尺;地形图【中图分类号】TV221【文献标识码】A 【文章编号】1674-0688(2019)06-0134-020前言科学技术的发展推动了测绘产业的变革,传统的测绘手段逐渐被新技术、新手段替代,唯有技术创新才能不断增强科技的核心竞争力。
大疆Phantom4RTK 无人机的出现,在测绘业界掀起了一股热潮。
Phantom4RTK 无人机是一款小型四旋翼高精度航测无人机,面向低空摄影测量应用,具备厘米级定位系统和高性能程序系统,大幅度减少了传统航测中所需的地面控制点,简化了作业流程,降低了时间成本,提高了工作效率,与中海达UAV-PPK 结合应用,更是提高了航测的精度。
1工程实例1.1工程简介广西西江干流桂平市城区河南防护治理工程位于广西桂平市河南防护片区,设计防护岸坡长度约2.4km ,测量主要任务为1∶1000地形图测绘及断面测量,测区岸边植被茂盛、居民地偏多,外业作业方式主要采用航测为主,内业作业方式主要采用EPS 裸眼三维测图。
1.2作业流程工作伊始,在完成控制测量后,马上可以开展无人机航测工作。
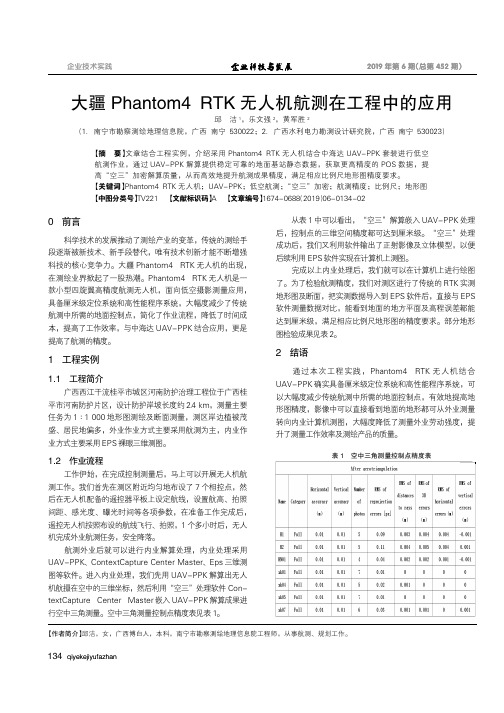
我们首先在测区附近均匀地布设了7个相控点,然后在无人机配备的遥控器平板上设定航线,设置航高、拍照间距、感光度、曝光时间等各项参数,在准备工作完成后,遥控无人机按照布设的航线飞行、拍照,1个多小时后,无人机完成外业航测任务,安全降落。
航测外业后就可以进行内业解算处理,内业处理采用UAV-PPK 、ContextCapture Center Master 、Eps 三维测图等软件。
基于大疆无人机SDK二次开发
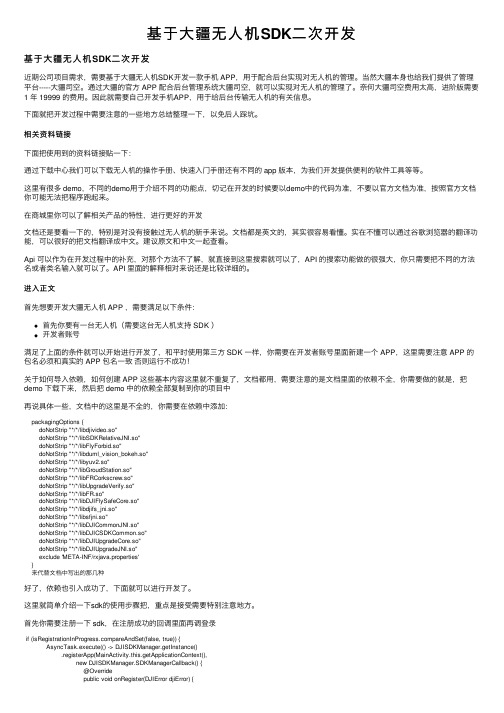
基于⼤疆⽆⼈机SDK⼆次开发基于⼤疆⽆⼈机SDK⼆次开发近期公司项⽬需求,需要基于⼤疆⽆⼈机SDK开发⼀款⼿机 APP,⽤于配合后台实现对⽆⼈机的管理。
当然⼤疆本⾝也给我们提供了管理平台-----⼤疆司空。
通过⼤疆的官⽅ APP 配合后台管理系统⼤疆司空,就可以实现对⽆⼈机的管理了。
奈何⼤疆司空费⽤太⾼,进阶版需要1 年 19999 的费⽤。
因此就需要⾃⼰开发⼿机APP,⽤于给后台传输⽆⼈机的有关信息。
下⾯就把开发过程中需要注意的⼀些地⽅总结整理⼀下,以免后⼈踩坑。
相关资料链接下⾯把使⽤到的资料链接贴⼀下:通过下载中⼼我们可以下载⽆⼈机的操作⼿册、快速⼊门⼿册还有不同的 app 版本,为我们开发提供便利的软件⼯具等等。
这⾥有很多 demo,不同的demo⽤于介绍不同的功能点,切记在开发的时候要以demo中的代码为准,不要以官⽅⽂档为准,按照官⽅⽂档你可能⽆法把程序跑起来。
在商城⾥你可以了解相关产品的特性,进⾏更好的开发⽂档还是要看⼀下的,特别是对没有接触过⽆⼈机的新⼿来说。
⽂档都是英⽂的,其实很容易看懂。
实在不懂可以通过⾕歌浏览器的翻译功能,可以很好的把⽂档翻译成中⽂。
建议原⽂和中⽂⼀起查看。
Api 可以作为在开发过程中的补充,对那个⽅法不了解,就直接到这⾥搜索就可以了,API 的搜索功能做的很强⼤,你只需要把不同的⽅法名或者类名输⼊就可以了。
API ⾥⾯的解释相对来说还是⽐较详细的。
进⼊正⽂⾸先想要开发⼤疆⽆⼈机 APP ,需要满⾜以下条件:⾸先你要有⼀台⽆⼈机(需要这台⽆⼈机⽀持 SDK )开发者账号满⾜了上⾯的条件就可以开始进⾏开发了,和平时使⽤第三⽅ SDK ⼀样,你需要在开发者账号⾥⾯新建⼀个 APP,这⾥需要注意 APP 的包名必须和真实的 APP 包名⼀致否则运⾏不成功!关于如何导⼊依赖,如何创建 APP 这些基本内容这⾥就不重复了,⽂档都⽤,需要注意的是⽂档⾥⾯的依赖不全,你需要做的就是,把demo 下载下来,然后把 demo 中的依赖全部复制到你的项⽬中再说具体⼀些,⽂档中的这⾥是不全的,你需要在依赖中添加:packagingOptions {doNotStrip "*/*/libdjivideo.so"doNotStrip "*/*/libSDKRelativeJNI.so"doNotStrip "*/*/libFlyForbid.so"doNotStrip "*/*/libduml_vision_bokeh.so"doNotStrip "*/*/libyuv2.so"doNotStrip "*/*/libGroudStation.so"doNotStrip "*/*/libFRCorkscrew.so"doNotStrip "*/*/libUpgradeVerify.so"doNotStrip "*/*/libFR.so"doNotStrip "*/*/libDJIFlySafeCore.so"doNotStrip "*/*/libdjifs_jni.so"doNotStrip "*/*/libsfjni.so"doNotStrip "*/*/libDJICommonJNI.so"doNotStrip "*/*/libDJICSDKCommon.so"doNotStrip "*/*/libDJIUpgradeCore.so"doNotStrip "*/*/libDJIUpgradeJNI.so"exclude 'META-INF/rxjava.properties'}来代替⽂档中写出的那⼏种好了,依赖也引⼊成功了,下⾯就可以进⾏开发了。
无人机测绘项目设计
无人机测绘项目设计一、项目概述无人机测绘项目是利用无人机飞行平台进行测绘工作的一种新兴技术。
它不仅可以提高测绘效率,减少测绘成本,还可以获取高精度的测绘数据。
本项目旨在利用无人机进行测绘工作,包括地形测绘、植被变化监测、建筑物测量等工作。
二、项目目标1.提高测绘效率:利用无人机进行测绘可以大幅提高测绘效率,减少人力物力的消耗。
2.提供精确数据:无人机可以携带高精度的测绘设备,可以提供准确的测绘数据。
3.减少人员风险:利用无人机进行测绘可以避免人员进入危险地区,降低工作中的风险。
三、项目实施步骤1.无人机选型与组装:选择适合测绘工作的无人机,并根据需要组装相应的测绘设备。
2.航线规划:根据测绘区域的特点,制定合理的航线规划,确保全面覆盖。
3.飞行任务执行:根据航线规划,设置无人机的起飞、飞行和降落等任务,并进行飞行任务的执行。
4.数据采集与处理:在飞行任务执行完毕后,将收集到的数据进行处理,并生成测绘报告。
5.报告输出与分析:将测绘报告输出,并进行数据分析,为后续工作提供参考。
四、项目实施方案1.选择合适的无人机:根据测绘范围和需求选择合适的无人机,考虑飞行时间、载荷能力以及稳定性等因素。
2.测绘设备组装:根据需要选择合适的测绘设备,包括高精度相机、激光雷达、GPS系统等,并进行组装。
3.航线规划软件选择:选择适合无人机测绘的航线规划软件,可以根据需求进行航线规划设计。
4.飞行任务执行方案:根据航线规划和测绘需求,制定具体的飞行任务执行方案,包括起飞、巡航、拍摄和降落等。
5.数据处理方案:选择合适的数据处理软件进行数据处理,包括图像处理和数据分析等。
6.报告输出与分析方案:将处理后的数据生成测绘报告,并进行数据分析,为后续工作提供参考。
五、项目预算1.无人机与测绘设备费用:根据项目需求选择合适的无人机和测绘设备,并进行费用估算。
2.航线规划软件费用:根据需要选择合适的航线规划软件,并进行费用估算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第42卷第1期2019年1月测绘与空间地理信息GEOMATICS&SPATIALINFORMATIONTECHNOLOGYVol.42ꎬNo.1Jan.ꎬ2019收稿日期:2017-09-05作者简介:周海龙(1991-)ꎬ男ꎬ山东枣庄人ꎬ测绘工程专业硕士研究生ꎬ主要研究方向为空间数据挖掘与应用ꎮ基于大疆无人机测绘产品制作方法研究周海龙ꎬ周光耀(山东科技大学测绘科学与工程学院ꎬ山东青岛266590)摘要:无人机测绘作为一种新的测绘技术日趋成熟ꎬ到目前为止ꎬ大型㊁固定翼无人机在测绘领域发展成熟ꎬ而以大疆为代表的小型㊁价格低廉㊁轻便型无人机ꎬ在测绘领域的应用才刚刚起步ꎮ如何让小型无人机更好地服务于相关测绘产品的生产仍然是专业领域的一大难题ꎮ本文以某地区为研究对象ꎬ利用大疆精灵4进行外业照片采集和一系列内业处理ꎬ效果良好ꎮ关键词:大疆ꎻ无人机ꎻ测绘产品中图分类号:P208ꎻTD177㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-5867(2019)01-0154-02ResearchontheProductionMethodofDJIDroneZHOUHailongꎬZHOUGuangyao(CollegeofGeomaticsꎬShandongUniversityofScienceandTechnologyꎬQingdao266590ꎬChina)Abstract:UAVmappingasanewmappingtechnologyismaturingꎬsofarꎬlargeꎬfixed-wingunmannedaerialvehiclesinthefieldofmappingdevelopmentmaturedꎬforDJastherepresentativeofthesmallꎬinexpensiveꎬportableUAVꎬinthemappingapplicationhasjuststarted.Howtomakesmallunmannedaerialvehiclesbetterservetheproductionofrelatedsurveyingandmappingproductsisstillamajorprobleminthefieldofmapping.InthispaperꎬaregionforthestudyoftheobjectꎬtheuseoflargeDJPhantom4forthefieldphotocollectionandaseriesofinternalprocessingeffectisgood.Keywords:DJꎻUAVꎻmappingproducts0㊀引㊀言目前ꎬ大范围航测虽然早已用上油动㊁电动固定翼飞机ꎬ但是专业的测绘无人机由于价格过于昂贵ꎬ大型测绘单位通常只能单个采购ꎬ在实际项目中也只是作为辅助ꎬ难以发挥无人机的集群效应ꎮ中小型测绘企业难以负担测绘无人机高额的费用与使用风险ꎬ测绘行业的无人机应用一直都无法大范围展开ꎮ对于长期从事野外工作的测绘人员而言ꎬ轻量化外业操作是最大的诉求ꎮ随着近年来无人机和计算机视觉技术的发展ꎬ以大疆为主的各种小型轻便无人机开始进入测绘市场ꎬ同样也能搭载GPS设备㊁IMU以及专业的相机ꎬ越来越多的单位开始采用大疆无人机进行测绘ꎮ本文以大疆精灵4为例ꎬ利用DJIGSPro地面站软件进行地形图测绘ꎬ使用无人机拍摄带有足够重叠度的照片ꎬ进行后续一系列测绘产品的制作ꎬ能满足一定的测绘精度要求ꎬ并为中小型测绘企业小型无人机测绘提供一些经验和指导ꎮ1㊀大疆无人机产品总介由汪滔等人于2006年创立的深圳市大疆创新科技有限公司(DJI-Innovationsꎬ简称DJI)ꎬ是全球领先的无人飞行器控制系统及无人机解决方案的研发和生产商ꎬ客户遍布全球100多个国家ꎮ大疆创新丰富的产品线为测绘地理信息行业的应用提供了诸多选择ꎬ从御MavicPro㊁精灵4Pro小型一体机ꎬ悟2专业无人机ꎬ到经纬M200系列ꎬ以及经纬M600Pro可以载重更多丰富载荷的无人机ꎬ全系列的机型满足了不同场景下的测绘需求ꎮ为了满足测绘行业后期处理对于图像重叠度的需求ꎬ2017年初大疆专门研发出了迎合测绘需求的DJIGSPro软件ꎬ用来控制DJI全系列无人机的飞行ꎮ凭借GSProꎬ大疆全系列无人机都可以成为专业的无人机测绘航测工具ꎮ2㊀外业数据采集此次测量实践任务以某市郊区一块土坡为例ꎬ总面积约2000m2ꎮ测区周围环境空旷ꎬ远离机场ꎬ没有高大建筑物ꎬ适合航测ꎮ大疆精灵4无人机一架㊁IPAD一个㊁遥控器一个㊁电池4块㊁工作人员两人(一人操作一人负责周边安全)ꎬ飞行前已申请空域ꎮ虽然DJI系列无人机不是专业测绘型无人机ꎬ无法导出POS数据ꎬ但是每张影像都包含位置和姿态信息ꎬ可以通过航测软件自动解算ꎮ外业数据采集时需要布设一定数量的像控点ꎬ如图1所示ꎮ图1㊀像控点Fig.1㊀Imagecontrolpoint左边为黑白靶标像控点ꎬ右图为自制像控点ꎬ像控点坐标数据采集使用GPS-RTKꎮ像控点布设完毕后ꎬ对无人机进行地面站设置ꎬ主要流程如下:1)准备工作:准备工作包括DJ无人机螺旋桨㊁电池安装和DJGSPro软件连接及参数设置ꎻ2)起飞:准备工作结束无误后ꎬ点击软件起飞触屏ꎬ无人机盘旋在起飞点上方ꎬ爬升至指定航高后飞向航线ꎻ3)航线飞行:无人机在爬升至指定航高后ꎬ自动飞往航线起点ꎬ然后沿航线飞行ꎬ飞行过程中按飞行计划自动开始定点拍摄照片ꎻ当无人机中途电量不够时选择一键返航ꎬ换上新电池后选择断点飞行ꎮ4)降落:无人机在飞行完成所有航线后ꎬ按照规定设置到达返航高度ꎬ按照飞行计划在分行点缓慢降落ꎬ降落至区域规定位置ꎮ航摄完成后ꎬ现场对数据进行检查ꎬ核查拍摄照片数量与飞行轨迹参数是否一致ꎬ是否出现漏拍现象ꎻ检查照片质量ꎬ是否有模糊不清等情况ꎮ检查完成后如存在质量问题则需重新补摄飞行ꎬ若无质量问题ꎬ则本次航摄完成ꎮ3㊀内业数据处理目前ꎬ无人机内业数据处理软件较多ꎬ主要有ipho㊁photoscan㊁smart3d㊁PIX4Dmapper㊁Pixel-Mosaic㊁UAVmaster等常用软件ꎬ这几款软件原理算法大致相同ꎬ但也有各自的优缺点ꎮ本次实验快速拼接生成DOM使用Photoscan软件ꎻ三维建模使用Smart3D软件ꎻ矢量编辑使用Pixel-Mosaic和ArcGIS两款软件结合ꎻ生成等高线使用Pixel-Mosaic和Globalmapper等软件结合ꎻ土石方量测算可以生成点云数据ꎬ使用Realworks软件对点云建模计算ꎻ常规测算如距离㊁高度等使用Pixel-Mosaic软件ꎮ3.1㊀快速拼接生成DOM生成DOM一般是测绘产品制作的重要环节ꎬ经试验Photoscan软件相比较其他几款软件具有操作简单㊁对硬件配置要求更低㊁操作时间短的优点ꎮ打开软件点击菜单栏 工作流程 ꎬ下拉菜单中有 添加照片 添加文件夹 选项ꎬ分别以选择照片和选择整个文件夹影像方式加入影像ꎬ点击 添加照片 ꎬ选择影像后ꎬ在左侧会出现影像名列表ꎬ软件下侧会显示影像缩略图ꎬ双击每个缩略图ꎬ主窗口显示该张影像的大图ꎬ可以查看影像ꎬ导入控制点文件ꎬ根据控制点文件对照片刺点ꎮ点击 工作流程-对齐照片 ꎬ在弹出的对话框中ꎬ精度选择 高 ꎬ成对预选选择 参考 ꎬ点击确定ꎬ自动开始 对齐照片 处理ꎮ此过程只需等待ꎬ无须操作ꎮ处理完成后ꎬ会生成三维点云数据ꎬ之后点击 工作流程ң建立密集点云 ꎬ在弹出的对话框中ꎬ选择所需要的质量ꎬ质量设置越高ꎬ处理速度越慢ꎮ点击确定后ꎬ系统自动处理ꎬ并显示处理进度ꎮ处理完成后ꎬ生成密集点云数据ꎬ选择 工作流程ң生成网格 ꎬ在弹出的对话框中选择所需要的质量ꎬ点击确定ꎬ处理完成后ꎬ生成测区光滑曲面ꎬ点击 文件ң导出正射影像ң导出JPEG/TIFF/PNG ꎬ导出拼接后影像ꎬ在弹出的界面中ꎬ直接默认设置即可ꎬ点击 导出 ꎬ开始导出ꎬ等待完成后ꎬ即可到相应路径下查看拼接后的正射影像ꎮ3.2㊀快速三维建模利用航摄影像可生成DEM和DOMꎬ从影像中提取建筑物纹理ꎬ从而进行三维建模ꎮ完成用于三维建模的建筑物纹理采集ꎬ省去地面拍照人工采集建筑物纹理这一传统工序ꎬ实现全摄影测量方式三维建模ꎬ而Smart3D软件一直是三维建模较为通用的主流软件ꎮ打开Smart3Dꎬ选择新建工程ꎬ输入工程名称和路径ꎬ添加完影像后ꎬ需要检查影像完整性(包括影像是否丢失㊁是否损坏)ꎬ输入正确像片信息后ꎬ在Block的general选项中ꎬ选择提交空中三角测量ꎬ定义空中三角测量对话框弹出ꎮ可以设置AT的名称㊁定位㊁参考方式以及设置ꎮ本样例数据空三定义对话框直接按照默认方式进入下一步ꎬ最后提交ꎬAT完毕后左侧工程栏信息树中会出现Block-ATꎬ点击Block-ATꎬ然后点击右下角的新建重建ꎬ重建过程完毕后左侧工程栏信息树中会出现reconstruction_1ꎬ点击显示ꎮ在reconstruction_1(常规)页ꎬ点击提交新产品ꎬ弹出定义产品对话框ꎮ首先是名称ꎬ输入名称和描述ꎮ然后进行空三计算和同名点匹配生成密集三维点云ꎬ对生成的密集点云进行三角网拟合生成三维模型ꎮ3.3㊀矢量编辑和生成等高线当需要生成地形图时ꎬ对于建筑物比较多的测区ꎬ可以采用矢量编辑的方式内业处理ꎮ当遇到地形㊁地势起伏较大的区域ꎬ可以先借用无人机测绘软件生成㊁输出DEMꎬ再生成等高线ꎮ由于3.1和3.2所用案例为某地形数据ꎬ不方便进行矢量编辑ꎬ本节使用某城市的正摄影像数据进行试验ꎬ其主要流程如下:将生成好的DOM导入ArcGIS软件中ꎬ新建图层如厂房㊁居民地㊁河流㊁道路等ꎬ根据正摄影像图ꎬ人工识别并进行矢量编辑ꎮ3.4㊀等高线及土石方量估算常规测量中土方量计算一般使用GPS-RTK测量一系列特征点ꎬ将特征点坐标导入CASS软件中建立三角网ꎬ进行土方量计算ꎮ而无人机影像数据在生成正摄影像图时ꎬ会生成点云数据文件ꎮ首先在photoscan软件中选择文件菜单ꎬ导出3D点云ꎬ可以选择OBJ㊁PLY㊁LAS格㊀㊀(下转第162页)551第1期周海龙等:基于大疆无人机测绘产品制作方法研究5㊀结束语综上所述ꎬ当前无人机倾斜摄影技术已经发展为航摄领域不可或缺的技术ꎬ与传统的航摄技术相比具备多角度拍摄的优势ꎬ同时ꎬ在多个领域中运用该技术进行三维建模也日渐广泛ꎮ本次实验进行了实际的三维建模ꎬ通过具体的分析研究ꎬ确认运用该项技术得到的结果精度较高ꎬ在类似的三维建模中ꎬ可将这一技术作为参考开展实际工作ꎮ参考文献:[1]㊀范攀峰ꎬ李露露.基于Smart3D的低空无人机倾斜摄影实景三维建模研究[J].测绘通报ꎬ2017(S2):77-81. [2]㊀冯茂平ꎬ杨正银ꎬ张秦罡.基于小型多镜头航摄仪的无人机倾斜摄影技术在实景三维建模中的应用[J].测绘通报ꎬ2017(S1):5-7.[3]㊀曲林ꎬ冯洋ꎬ支玲美ꎬ等.基于无人机倾斜摄影数据的实景三维建模研究[J].测绘与空间地理信息ꎬ2015ꎬ38(3):38-39ꎬ43.[4]㊀曹明兰ꎬ桂维振ꎬ周浩恩.基于无人机的影像数据采集与三维建模[J].北京工业职业技术学院学报ꎬ2018ꎬ17(2):1-4.[5]㊀张逢春.浅析无人机倾斜摄影测量技术与应用[J].世界有色金属ꎬ2018(3):25-27.[6]㊀王永生ꎬ卢小平ꎬ朱慧ꎬ等.无人机实景三维建模在水利BIM中的应用[J].测绘通报ꎬ2018(3):126-129. [7]㊀王桂钢.基于无人机倾斜摄影的合作市实景三维建模[J].测绘与空间地理信息ꎬ2018ꎬ41(2):106-108ꎬ112. [8]㊀曹希ꎬ孙承帅.基于无人机倾斜摄影数据的矿山建模研究[J].矿业工程ꎬ2018ꎬ16(1):58-60.[9]㊀张冰爽.基于无人机航拍的三维建模在城市规划中的运用[J].住宅与房地产ꎬ2017(9):260-294. [10]㊀胡智银ꎬ李英成ꎬ王凤ꎬ等.轻小型无人机城市三维建模精度分析与评价[J].遥感信息ꎬ2017ꎬ32(6):38-44. [11]㊀苑方艳ꎬ左正立ꎬ祁增营ꎬ等.2镜头无人机倾斜摄影的三维建模[J].遥感信息ꎬ2017ꎬ32(6):45-50. [12]㊀褚杰ꎬ盛一楠.无人机倾斜摄影测量技术在城市三维建模及三维数据更新中的应用[J].测绘通报ꎬ2017(S1):130-135.[13]㊀王静.基于无人机倾斜摄影的城市三维建模方法研究[J].科技创新导报ꎬ2017ꎬ14(19):20-21.[编辑:张㊀曦](上接第155页)式以及OSGB的LOD组织格式ꎬ该项功能可以导出稀疏点云以及密集点云ꎬ同时可选是否导出法线㊁颜色信息ꎮ将导出的点云数据导入Realworks软件中ꎬ然后切割选择自己需要的区域点云数据ꎬ生成三角网ꎬ根据三角网生成三维模型ꎬ由三维模型生成等高线ꎮ计算土石方量与生成等高线类似ꎬ也是首先由点云数据建立三角网模型ꎬ此操作对电脑配置要求较高ꎬ一般建议用工作站处理ꎮ定义填挖方界线ꎬ计算挖填方量ꎮ4㊀结束语本次无人机测绘使用DJPhantom4完成外业测量和内业处理任务ꎬ相比较之前的固定翼㊁大型无人机测绘是一次创新ꎮ本次实验完成了一系列测绘产品的制作ꎬ效果良好ꎬ但美中不足的是大疆系列缺少POS数据ꎬ制作完成的测绘产品没有地理信息ꎮ相信随着DJ系列的更新换代ꎬ轻便㊁小巧㊁低廉型无人机将会受到更多中小型测绘企业的欢迎ꎮ参考文献:[1]㊀王光彦ꎬ徐加东ꎬ赵培.无人机航测在小范围工程测绘中的应用研究[J].矿山测量ꎬ2016(10):36-38. [2]㊀高志国ꎬ宋杨ꎬ曾凡洋.微型无人机航摄系统快速测绘小区域大比例尺地形图试验分析[J].工程勘察ꎬ2015(12):71-75.[3]㊀王洛飞.无人机低空摄影测量在城市测绘保障中的应用前景[J].测绘与空间地理信息ꎬ2014ꎬ37(2):217-219. [4]㊀薛永安ꎬ王晓丽ꎬ张明媚.无人机航摄系统快速测绘矿区大比例尺地形图[J].测绘地理信息ꎬ2013ꎬ38(4):46-48[5]㊀陈斯亮.UAV航测结合三维激光扫描的古栈道测绘建模[J].测绘科学ꎬ2016ꎬ41(2):23-26.[编辑:刘莉鑫](上接第158页)[7]㊀T.A.HerringꎬR.W.KingꎬS.C.McClusky.GAMITRefer ̄enceManual(Release10.6)[R].DepartmentofEarthꎬAt ̄mosphericꎬandPlanetarySciencesMassachusettsInstituteofTechnologyꎬ2015.[8]㊀施闯ꎬ赵齐乐ꎬ楼益栋ꎬ等.卫星导航系统综合分析处理软件PANDA及研究进展[J].航天器工程ꎬ2009ꎬ18(4):64-70.[9]㊀卢茨(LutzꎬM.).Python编程[M].第4版.邹晓ꎬ瞿乔ꎬ任发科ꎬ译.北京:中国电力出版社ꎬ2015.[10]㊀王朝阳.基于Python的图书信息系统的设计与实现[D].长春:吉林大学ꎬ2016.[11]㊀RolfDachꎬSimonLutzꎬPeterWalserꎬetal.BerneseGPSSoftwareVersion5.2[R].AstronomicalInstituteꎬUniversityofBernꎬ2015.[编辑:刘莉鑫]261㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2019年。