模糊理论在风力发电设备状态评价中的应用
模糊控制理论及工程应用
模糊控制理论及工程应用模糊控制理论是一种能够处理非线性和模糊问题的控制方法。
它通过建立模糊规则和使用模糊推理来实现对系统的控制。
本文将介绍模糊控制理论的基本原理,以及其在工程应用中的重要性。
一、模糊控制理论的基本原理模糊控制理论是由扬·托东(Lotfi Zadeh)于1965年提出的。
其基本原理是通过建立模糊规则,对系统的输入和输出进行模糊化处理,然后利用模糊推理来确定系统的控制策略。
模糊规则是一种类似于“如果...那么...”的表达式,用于描述输入和输出之间的关系。
模糊推理则是模糊控制系统的核心,它通过将模糊规则应用于模糊化的输入和输出,来确定控制的动作。
二、模糊控制理论的工程应用模糊控制理论在工程应用中具有广泛的应用价值。
下面将分别介绍其在机械控制和电力系统控制中的应用。
1. 机械控制模糊控制理论在机械控制领域有着重要的应用。
其优势在于能处理非线性和模糊问题,使得控制系统更加鲁棒和稳定。
例如,在机器人控制中,模糊控制可实现对复杂环境的适应性和灵活性控制,使机器人能够自主感知和决策。
此外,模糊控制还可以应用于精密仪器的控制,通过建立模糊规则和模糊推理,实现对仪器位置和姿态的精确控制。
2. 电力系统控制模糊控制理论在电力系统控制领域也有着重要的应用。
电力系统是一个复杂的非线性系统,模糊控制通过建立模糊规则和模糊推理,可以实现对电力系统的稳定性和性能进行优化。
例如,在电力系统调度中,模糊控制可以根据不同的负荷需求和发电能力,实现对发电机组的出力控制,保持电力系统的稳定运行。
此外,模糊控制还可以应用于电力系统中的故障诊断和故障恢复,通过模糊推理,快速准确地定位和修复故障。
三、总结模糊控制理论是一种处理非线性和模糊问题的有效方法。
其基本原理是通过建立模糊规则和使用模糊推理来实现对系统的控制。
模糊控制理论在机械控制和电力系统控制等工程领域有着广泛的应用。
它能够提高控制系统的鲁棒性和稳定性,并且能够适应复杂的环境和变化,具有良好的控制效果。
风力发电系统中的建模与控制研究

风力发电系统中的建模与控制研究在当今的清洁能源发展领域中,风力发电系统的应用越来越广泛。
然而,风力发电系统的性能受到很多因素的影响,如风速、方向、风机的角度等,因此需要对其进行建模和控制。
本文将对风力发电系统的建模和控制进行详细介绍。
一、风力发电系统的建模风力发电系统的建模是指对其进行数学模型的建立,以便于对其进行分析和优化。
通常,风力发电系统可以分为两类:水平轴式和垂直轴式,两者的建模方法略有不同。
1.水平轴式风力发电机的建模水平轴式风力发电机的建模通常涉及以下几个方面的内容:(1) 风速建模:风速是风力发电机发电的重要参数,其建模一般采用韦伯分布模型或雷诺分布模型等。
(2) 风机建模:风机在发电过程中的旋转角度、转速等参数的建模,可以采用PID控制器或模糊控制器进行建模。
(3) 发电机建模:发电机的建模包括稳定性、转矩特性等方面的内容,可以采用dq坐标转换进行建模。
2.垂直轴式风力发电机的建模垂直轴式风力发电机的建模通常涉及以下几个方面的内容:(1) 风车叶片建模:风车叶片的建模通常包括气动特性等方面的内容,可以采用贝塞尔曲线、叶片离散化等方法进行建模。
(2) 风机建模:风机的建模同水平轴式风力发电机相似,通常采用PID控制器或模糊控制器进行建模。
(3) 发电机建模:同水平轴式风力发电机相类似,发电机的建模也可以采用dq坐标转换进行建模。
二、风力发电系统的控制风力发电系统的控制是指在对其进行建模的基础上,对风力发电系统进行控制,以优化其性能、提高其效率。
1.PID控制器PID控制器是风力发电系统控制中最常用的控制器之一,其可调性强、稳定性好,在控制精度和速度上表现良好。
2.模糊控制器模糊控制器则是一种更为高级的控制器,其利用模糊数学理论,将模糊变量通过模糊推理引擎转换为控制信号,从而实现对风力发电系统的控制。
3.滑模控制器滑模控制器则是一种更为高级的控制方法,其可实现对风力发电系统的精准跟踪和控制,是当前控制水平较高的控制方法之一。
风力发电系统最大功率追踪控制设计

风力发电系统最大功率追踪控制设计摘要风力发电系统是一种绿色、清洁的能源系统,具有深远的社会和经济意义。
为了提高风力发电系统的能量转换效率和稳定性,本文基于最大功率追踪控制理论,设计了一种基于模糊控制的风力发电系统最大功率追踪控制策略,研究表明该控制策略具有较好的控制效果。
关键词:风力发电系统;最大功率追踪控制;模糊控制AbstractWind power generation system is a green and clean energy system with profound social and economic significance. Inorder to improve the energy conversion efficiency andstability of wind power generation system, this paper designs a maximum power point tracking control strategy based onfuzzy control theory, which has better control effect according to the research.Keywords: Wind Power Generation System; Maximum Power Point Tracking Control; Fuzzy Control1. 引言随着能源危机不断加剧和环境问题日益突出,可再生能源得到了广泛的关注和研究。
风力发电是一种绿色、清洁的能源,具有广泛的应用前景和巨大的经济效益。
然而,由于风力发电机的风速、转速和负载变化等因素的影响,风力发电系统在实际运行中会出现能量损失和不稳定等问题,因此,提高风力发电系统的能量转换效率和稳定性,是当前研究的热点和难点问题[1]。
2. 风力发电系统最大功率追踪控制风力发电系统最大功率追踪控制是指在一定的风速和负载情况下,将风力发电机中的最大功率转化为输出功率的控制过程[2]。
风力发电机状态监测和故障诊断技术的研究与进展

风力发电机状态监测和故障诊断技术的研究与进展一、本文概述随着全球能源结构的转型和可再生能源的大力发展,风力发电作为一种清洁、可再生的能源形式,其地位日益凸显。
风力发电机(Wind Turbine,WT)作为风力发电系统的核心设备,其运行状态和性能直接影响到整个风电场的发电效率和经济效益。
因此,对风力发电机进行状态监测和故障诊断技术的研究,对于保障风电系统的安全稳定运行、提高发电效率、延长设备寿命具有重要的理论和实践价值。
本文旨在全面综述风力发电机状态监测和故障诊断技术的研究现状与发展趋势。
文章首先介绍了风力发电机的基本结构和工作原理,分析了风力发电机运行过程中可能出现的故障类型及其成因。
然后,重点阐述了当前风力发电机状态监测和故障诊断的主要技术方法,包括基于振动分析的故障诊断、基于声学信号的故障诊断、基于电气参数的故障诊断等。
对近年来新兴的和大数据技术在风力发电机故障诊断中的应用进行了详细介绍。
本文还总结了风力发电机状态监测和故障诊断技术的发展趋势和挑战,包括技术方法的创新、多源信息融合技术的应用、智能化和自动化水平的提升等。
文章展望了未来风力发电机状态监测和故障诊断技术的发展方向,以期为我国风电行业的健康发展提供理论支持和技术指导。
二、风力发电机的基本原理与结构风力发电机是一种将风能转化为机械能,再进一步转化为电能的装置。
其基本原理基于贝茨定律,即风能转换效率的理论最大值约为16/27,约为3%。
风力发电机主要由风轮、发电机(包括装置)、调向器(尾翼)、塔架、限速安全机构和储能装置等构件组成。
风轮是风力发电机的主要部件,一般由2-3个叶片组成。
风轮受风力作用而旋转,将风能转化为机械能。
风轮的转速随风速的变化而变化,为了保证发电机能够在风速变化的情况下稳定工作,需要通过增速机构提高风轮的转速。
发电机则将风轮旋转的机械能转化为电能。
发电机的类型有很多,如永磁发电机、电励磁发电机等,其选择取决于风力发电机的具体设计需求和运行环境。
风力发电机组模糊控制器的设计与仿真
第l 2期
胡世忠等. 风力 发电机组模糊 控制器的设计与仿真
・ 7・ 7
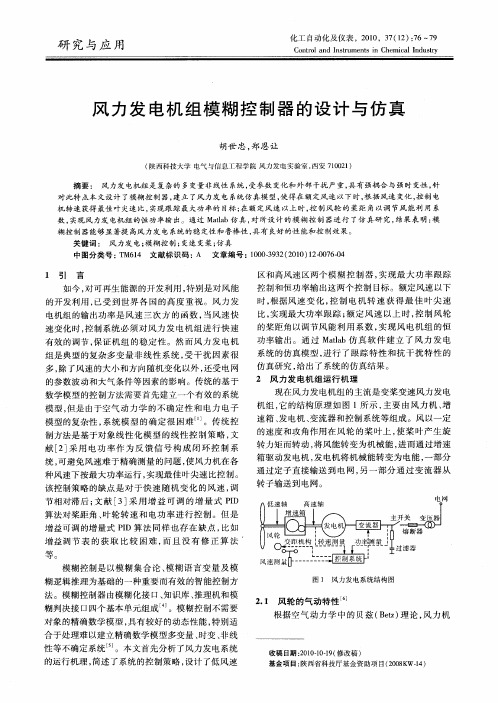
所捕获 的风能可转变为机械输 出功率 P :
P = 5 A ) c( , () 1
变速 变桨风力发 电机组根据不 同的风况可分为
三个不 同的运行 阶段 : 第一 阶段是起动阶段 , 发电机 转速从静止上升 到切 入速 度 ; 第二 阶段是 风力发 电 机组切入 电网后运行 在额定 风速 下 的区域 , 它又 分 为变速运行 区域 (C 恒定 区) 和恒 速运 行 区域 ; 第 三 阶段是 风力 发 电机组 运行 在额 定风 速 以上 的 区 域, 也称为恒功率 区域 。 根据变速变桨风力发电机组在不同区域 的运行 情况 , 基本的控制策 略为 : 在额 定风 速 以下 时 , 主要 是调节发电机反力矩使 转速跟 随风速 变化 , 以获得
等。
模糊控制是 以模糊集 合论 、 糊语 言变量及 模 模
糊逻辑推理为基础的一种重要 而有效 的智能控制方 法 。模糊控制器由模糊化接 口、 知识库 、 推理机和模 糊判决接 口四个 基本单元组成 。模糊控制不需要 对象的精确数学模 型 , 具有较好 的动态性能 , 特别适
风
图 1 风 力 发 电系 统 结 构 图
多 , 了风 速 的大 小 和方 向随 机 变 化 以 外 , 受 电 网 除 还
的参数波动和大气条件等 因素的影响。传统 的基 于
数学模型的控制方法需要首先建立一个有效的系统 模型 , 但是 由于空气 动力学 的不确定 性和 电力 电子 模型的复杂性 , 系统模 型 的确 定很 困难 。传 统控 制方法是基 于对象 线性化模 型 的线 性控制 策略 , 文 献 [ ] 用 电功率 作 为反 馈 信 号构 成 闭环 控 制 系 2采 统, 可避免风速难于精确测量的问题 , 使风力机在各 种风速下按最大功率运行 , 实现最佳 叶尖速 比控制 。
模糊网络分析在海上风电项目风险评价中的应用
我 国海上风 电项 目的开发提供一定 的决策理论依据。 关键词:海 上风 电;风 险评价 ;模糊 网络分析 中图分类号:T B1 文献标识码 :A ‘
Ap l aino A s v laino soe n o r rjcs pi t f - NPi r ke a t f f h r d we oet c o F ni u o o wi p p
o soewidp we rjcs S c n l er ke a ains s m setbi e , d i a cra c t e f h r n o r oet. eo dyt s v l t yt wa s lh d a codn ewi t p h i u o e a s n n h h
fr ad F a y tepo o e to sa pi o a f h r n rjc ae s d h w a te ow r. i l h rp sd me d wa p l d t n o soe wid poet s t y s o st th n l h e .C u h po oe to o l v la er k o f h r n rjc, n rvd ai fr ed v l me t f rp sdme dc ud e aut t i fo soewi poet a d po ieb s o e e p n h eh s d s h t o o o soe n oet f h r d rjc. wi p
第3 O卷第 1 期
、o .0 ,13 No. 1
文 章编号 : 10 .522 1)1 0 60 080 6(0 00 — 9.4 0
辽宁工程技术大学学报 ( 自然科学版 )
J u n l f a n n e h ia ie s y Nau a ce c o r a Lio igT c n c l o Unv ri ( trl in e) t S
基于模糊PID自适应控制MW级风力发电机偏航控制系统设计
授 、 北师 范大 学兼 职 硕 士 生 导 师, 东 吉林 省 重 点 学科—— 电力
系统及 其 自动化 学术 带 头人 , 吉林 省 自动化 学会 理 事 , 吉林 省
风 能 、 阳能学会理 事 。 多年 来致 力于风 力发 电技 术和 智 能控 太
摘 要 : 用模 糊 P D 自适应 偏 航 控制 算 法 实现 偏 采 I 航 系统 自动跟踪 风 向变化 调整风 轮位 置 。输入 量为
随动 控制 器来 控制偏 航 系统 , 难建 立数 学模 型 , 很 导 致执 行 机 构 必将 因 为 频 繁 动 作 而 易 损 坏 。而 模 糊
综合 自动化通 信管理 机 系统” 得 吉林省 科技进 步 三等 奖 ; 智 获 “ 能指纹 识别存取 包 柜” 得 吉林 省 高等 学校 自然科 学优 秀 成果 三 等 奖。公 开 发表 学 术论 文 2 获 0余 篇 , 中被 其
各种 检 索系统 收录 6篇 , 参编论 著 2本 , 得 专利 1项 。 获
) +
() 1
输 出 的模 糊 P D 自适 应 偏航 控 制模 型 , 计 了一 种 I 设 模糊 自适 应控 制器 , 实现 了偏航 系统控 制 。
4 8
长 春 工 程 学 院学 报 ( 自然 科 学 版 )
2 模 糊 控 制 器 设计
离散 P D控制 算法 为 : I
( )一 k e 忌 + 是 p( )
文 只讨论 了模 糊 P D控 制 器 的设计 , 于整个 系统 I 对
真 , 出 了仿 真 结 果 , 风 机 跟 随 风 向 的 变 化 而 变 给 使 化 , 高风 能利用 率 , 免 了执 行机 构 频 繁 的动作 , 提 避 优化机 组 性能 , 证 了偏 航 控制算 法 的有效 性 。 验 关 键词 : 偏航 控 制 系统 ; 糊 P D 控 制 ; 制规 则 ; 模 I 控
模糊综合评价的原理及应用
模糊综合评价的原理及应用1. 模糊综合评价的概述模糊综合评价是一种基于模糊逻辑理论的评价方法,适用于处理多因素、多指标、多层次的评价问题。
它能够将模糊信息进行数学化处理,从而得到相对准确的评价结果。
模糊综合评价方法在决策分析、工程评估、经济评价等领域得到广泛的应用。
2. 模糊综合评价的原理模糊综合评价的原理基于模糊集合理论和模糊运算。
其主要的思想是将模糊的评价问题通过模糊集合的描述进行建模,然后利用模糊运算对模糊集合进行处理,最终得到评价结果。
3. 模糊综合评价的步骤模糊综合评价一般包括以下步骤: - Step 1:确定评价指标集合。
根据评价目标确定一组能够全面反映评价对象特征的评价指标。
- Step 2:构建模糊集合。
对每个评价指标进行模糊化处理,将确定的评价指标转化为对应的模糊集合。
- Step 3:设定权重。
根据评价指标的重要性,确定每个评价指标的权重。
- Step 4:进行模糊运算。
对于模糊集合进行模糊运算,将不同指标的模糊集合进行组合。
- Step 5:解模糊化。
将模糊的评价结果通过解模糊化方法转化为具体的评价值。
4. 模糊综合评价的应用模糊综合评价方法广泛应用于各个领域,以下是一些典型的应用场景:4.1 工程评估在工程评估过程中,常常需要对多个因素进行综合评价,以确定最优的方案。
模糊综合评价可以将各个因素的模糊信息进行处理,得出一个相对准确的评估结果。
4.2 经济评价在经济决策中,常常需要对多个经济指标进行综合评估,以确定经济效益最大化的策略。
模糊综合评价可以将不确定的经济指标进行数学化处理,得到相对可靠的评估结果。
4.3 城市规划在城市规划过程中,常常需要考虑多个因素,如交通、环境、人口等。
模糊综合评价可以将这些因素进行综合评估,帮助决策者做出合理的规划决策。
4.4 产品质量评价在产品质量评价中,常常需要考虑多个指标,如外观、性能、可靠性等。
模糊综合评价可以将这些指标进行综合评估,给出一个全面的产品质量评价结果。
小型风力发电系统在线自调整模糊控制的应用
s a ls a e wi d p we y t m m l- c l n o r s s e
Q a—ag I eg I ol n ,L n B i P
(c ol f n r t n& EetcE g er g S adn azuU i r t, ia 5 1 1 hn ) Sh o o f ma o Io i l r ni ei , h no gJ nh nv sy J n2 0 0 ,C ia ci n n i ei n
第2 5卷
2 0年 01
第 4期
8月
山 东 建 筑 大 学 学 报
J OUR NAL OF HANDON S G JANZ I HU UNI VER I Y ST
Vo . 5 1 2 No 4 . Au . g 2 0 01
文 章 编 号 :6 3— 6 4 2 1 ) 4— 3 1— 3 17 7 4 (00 0 0 9 0
小 型 风 力 发 系 在 线 自调 整 模 糊 控 制 的 应 用 电 统
齐 保 良 , 朋 李
( 山东建筑大学 信 息与电气工程学院 , 山东 济南 20 0 ) 5 11 摘要 : 考虑 到测量 风速困难 以及风力机功率 曲线 难获取 , 提出了一种不需要知道风速 及风力 机功率 曲线的控制 方法—— 模糊控制在线 自调整 占空 比控制 法 , 介绍 了风 力机 特性 及控制 策 略 , 并详 细介 绍 了模 糊控 制器 的设 计, 并在 m t b s uik平 台上搭建 了相应 的运 行仿真 系统 , a a/i l l m n 进行 了相应 的仿 真分析 。结 果表 明 : 风速发生 在 突变的情况下 , 也能快速地找到新 的最大 功率点 , 追踪效果显 著 , 系统精度及 效率很 高而稳态误 差较小 , 鲁棒性
基于模糊控制的风力发电机组控制系统研究
相对 于模糊 变量 N B,N M,N s,zE,P S,P M,P B,式中 参数 口 的取值 分别 为 一 6、一 4、 一 2、0、2、4、6,通 过 后 文在 M T A A L B中设计的模糊 PI D控制器 ,得 到其 隶属度函数 曲线。通 过隶属度 函数 ,可以得到各语 言变 量的赋值表 。取输出语言变量 u 、 U 、U 的模 糊子集个 数均为 6,将 其量化到 ( 0,8 )内,即 Z Z , , Z =f l 2 3 4 5 6 7 8 ,,语 言变量取为 { 小 ,中小,中, 0, , , , , , , , ) 零, 中大 ,大} ,用 C, C=( E S M , , B B 表示。采用 较简单 的三 C , Z , , S M M , } 角形 隶属度 函数 。 根据 Z e l r— N c o S iga i h l 参数整定公式 ,进行 P D参数的数值初 I 始化 ,在额定风速 ( 0 3 / ) 1 . = S 到切出风速 ( 2 / ) 2 m S 的范 围内确定 K 、 ¨ K 、K 的变化 范围 ,确定 比例 因子 。 同时通 过功 率误差 的变 化范 围,确定输入 比例 因子为 0 0 . 8。 当桨距角 比较大时,风力机 的输出功率对桨距角的变化非常敏感 , 故引入可变论域思想 ,当桨距角 减小到一定值后,扩大功率误差和误 差变 化率 的 论域 范 围,使 控制 效 果更 加完 善 。 结合有关参考文献 的变桨距 控制实际经验 ,可 以列出一组 由模糊 条件语句构成 的系统模糊控 制规则表 。最后 ,在数值 的解模糊化时,利 用重心法进 行模糊判决,从论域 Z中得 出控制量 的精确值 作为控 制器 的 实 际输 出 。 四 、 风 力 发 电 机 数 学 模 型 建 立 与 仿 真 根据 实际参数 ,分别建 立 了风速模 型 ,风 力机模 型和发 电机模 型 ,并将各部分模型应用 ^ t a / i u n l 1 b S m l k模块进行仿真 【 ,仿真 a i 5 ] 的结果如 图 2所 示 。
模糊控制在追踪最大风能系数中的应用
() 5
4 o 中阂高新技攀企业 2 1 .1 0 0 o 1
式中,
为比例 常数 ,初始值 ro 作为设计参数 ( )
’ 5
r
根据 实际情况调整 ,通常可取为 ro=1 ( ) 。 当风机处于理想工作状态时,不投入模糊控制器 。
= V V…VR9 = () 6
图 3 风 能 功 率 曲 线
经变论域模糊控制器调节之后,对应 图2 出的风 给 速模型得到风能功率 曲线,经M t a 仿真如图3 a lb 所示 。 图4 是对应于 图3 风力机 功率 系数 曲线,可看出,风机 切入 以后 ,功率系数在前1 s 0 经模糊控制器调整达到最
低 风 速 运行 状 态 下 ,利 用该 控 制 器 ,可 以输 出较 为稳 定 的 额 定功 率 。 用 Mal tb仿 真 结果表 明该 控 制 器 可 以 a
提 高风 力发 电机 运行 的稳 定性 。
关 键词 :风力 发 电 ;最大风 能捕 获 ;变论 域模 糊控 制 器 ; 机功 率 系数 ; 风 风速 仿 真模 型 中图分 类 号 : TM6 4 1 文献标 识 码 : A 文章 编号 :1 0 — 3 4( 0 0 — 0 0 0 09 2 7 2 1 3 0 4 — 2 1)
“ ” 、 “正 小 ” 、 “正 中 ” 、 “ 大 ” 。论 域 为 零 正 {6 5 4 3 2 1 , 1 ,3 ,5 ) 由 一 ,一 ,一 ,一 ,一 ,一 ,0 ,2 ,4 ,6 ,
于 风 能转 换 系 统 误 差 相 对 比较 大 ,所 以隶 属 函 数 采 用
分辨率较低的高斯函数 ,如式 () 2所示 。
基于模糊PID的风力发电机桨距角控制
图 2 模 糊 PD 控 制 器 结构 图 I
2 风 力 发 电 机模 型 和模 糊 P D控 制 器 设 置 I
建 立 风 机 的 精 确 数 学 模 型 需 采 用 叶 素 理 论 ( l e ee n ba lme t d
模 糊 逻 辑 控 制是 一种 智 能 控 制 理论 , 过模 糊 逻 辑 和 近似 推 通
的 输 出 功 率 。 通过 模 糊 控 制 器 对 输 出 进行 大误 差 范 围 的 调整 , 先 再 通 过 PD 控制 器 进 行 小 范 围 的 精 细 调整 ,从 而 达 到快 速 稳 定 I
的调 节 效 果 。
二 竺兰 竺 二 兰 } = 兰l — — 】
u e wo m e i all ea r e ir r an g s in s t di nson i r ul l ay n b d au sa m e b s i f c i s f he tu t e. tig u smult n m er hp un t on o t sr cur Set n p i a i mo i o del n m a l T i uain es l s o t a te fe t ff z y PI c toli t ab.he sm lt r ut h w h t h e c o u z D on r s o s bet r h P D n r . e u z D on r h te tan I co to1 Th F z y PI c tol as sr g o ton r busn ssa d s abe t e e t el m prv wid o t e ,n i l o f c i y i v oe n p wers sems co tole fc . yt n r fe t Ke wo d wid ur ie, z y y r s: n t bn f z PI co tol i a e ft e wid t r n f z y c to. u D n r , t p ch ngl o h n u bie, z onr 1 u MAT AB i a i L smult on
基于模糊PID的风电系统转速控制仿真研究

f Taj e a oa r fr o t l h o & A pi t n o pi t yt r n nU i r to eh o g)Taj 0 34 1 ini K yLb rty o nr er . n o C oT y p l a osnC m l a dS s m 0i j nv s y f cnly , inn30 8 , ci i ce e ai e i T o i C ia2Hee S iah agPw r upyC m ayS iah ag 50 1Hee Poic, h a hn ;. bi h izun o e p l o pn , h i un 0 6 , b i rv e C i ) j S jz 0 n n
Vn. No5 1 27 .
Ma 01 v2 1
中 图分 类 号 :M 1 T 64
文 献标 志 码 : A
基 于 模 糊 P I D的风 电系 统 转 速 控 制仿 真 研 究
赵辉1李斌1朱利 强2刘俊杰1 , , ,
f. 市复杂控制 理论 与应 用重点 实验 室f 1天津 天津理工 大 学1天津 30 8; , 0 34
-| 一 纛
j0 l魏乳 E r 镣 乌
第2 卷 第 5 7 期
2 1年 5 01 月 文章 编 号 :6 4 3 1 (0 )50 6 — 3 17 — 84 2 1 0 — 0 3 0 1
电 网 与清 洁 能 源
Po rSy tm nd Cl a we se a e n Ene g ry
风速 的随机性 , 要求 系统 的响应快 , 调小 。本 超 设 计 的模糊 自适 应PD I 控制 器 的输入 量为 叶尖速 比 的误 差E 9 A = 一 和误 差变化 率△ E,输 出量 为发 电机
模糊数学的用途
模糊数学的用途模糊数学是指处理不确定、不精确或模糊的信息的一种数学方法。
它在解决一些模糊的、复杂的、现实问题上有着广泛的应用。
本文将从理论和实际两个方面介绍模糊数学的用途。
一、理论1. 模糊逻辑模糊逻辑是模糊数学的一种应用,它是一种适合于处理不确定信息和复杂信息的逻辑。
模糊逻辑能够描述自然语言中常见的模糊概念,例如“大概”、“差不多”等,这些概念不是精确的。
2. 模糊集合模糊集合是指元素不明确的集合。
在实际问题中,许多情况下我们无法精确地界定某些事物或概念的界限,这就需要运用模糊集合理论进行模糊处理。
3. 模糊数学在控制理论中的应用模糊控制是应用模糊数学于控制系统中的一种方法。
模糊控制理论可应用于自动化和工业过程控制等领域,这些领域包括风力发电、热卷机、机器人控制、航空航天等。
二、实际应用1. 生产优化在现代制造业的生产过程中,影响因素很多,而这些影响因素由于互相作用具有模糊性,很难用传统的数学方法进行分析和优化。
而采用模糊数学的方法进行分析和优化,就可以更好地解决生产过程中的问题,提高生产效率。
2. 市场营销在激烈的市场竞争中,企业要制定有效的市场营销策略。
而模糊数学的决策分析技术可以对市场进行模糊建模,对市场数据进行模糊处理和分析,提出最佳的市场策略。
3. 金融风险分析模糊数学在金融风险分析中也有广泛的应用。
比如股票交易、保险、债券等金融领域,通过模糊数学的方法可以对未来的财务走向进行预测,以便制定更为准确、有效的风险管理策略,降低金融风险。
综上所述,模糊数学在现代社会中有着广泛的应用。
无论是从理论层面还是实际应用层面,模糊数学都能为我们提供更为准确、有效的分析和决策的方法,帮助我们解决现实中的复杂问题。
基于变论域模糊PI的双馈风力发电机空载并网控制
c n i o e o e c n e t g t h d. i lt n r s l e f h tte v r b e u ie s z y P o t ls a e ee r d o d t n b fr o n ci te i n o Smu ai e ut v r y ta h a a l n v re f z - lc nr t t g r fre o s i i u o r y
触持电相 21 第 期 0 年 4 1
… … … … … … … … … … … … … … … … … … … … … . 。
驱动控制
… 一
基 于 变论 域 模 糊 P I的双 馈 风 力发 电机 空载 并 网控 制
黄悦华 , 徐 阳 , 星辰 , 周 张云才
( 三峡大学 , 湖北 宜昌 4 30 ) 4 0 2
中 图 分 类 号 : M3 5 T 1 文献标识码 : A 文 章 编 号 :04 7 1 (0 1 0 - 0 9 0 10 — 0 8 2 1 )4 0 6 - 4
No- a Cuti Lo d tng-i Co r lf r DFI i i n nt o o G n W nd Powe y t m s d o Vara e Uni e s r S s e Ba e n i bl v r e Fuz y— z PI HUANG u - a, Y e hu XU n ZHOU ng h n。 Yo g, xi —c e ZHANG Y n— a u ci
t t t h oy n t e l to h o o h a a l n v re f z y P o to , n a a t u z —P o t l sn f n ain t e r .I h ih fte t e r n t e v r b e u ie s u z - Ic n r l a d p ie f z y I c n r l r u ig e o g h y i v oe
兆瓦级风力发电机组模糊控制系统设计

訇 似
兆 瓦级风 力发 电机组 模 糊控 制 系统 设 计
Desi uz y gn off z cont ols t r ys em orM W at d w i ur ne po ergen at f r e nd t bi w er or
曾建成
3 1
l
3 1
0
1
1 0 一l 一 — —4 4 4 2 3 —
2 2
O O 一1 —2 — 3 — —5 —5 3 4 O 一1 —2 —4 — — — —5 — 4 5 5 5
—1 — —4 —5 — 3 5 — — — —6 6 6 6
模糊 集合U 即
2 2 隶属 函数 -
在分析 风场 风速变 化及变 化率 的基 础上 ,决 定 在该 设计 中 ,在有 效风 速范 围 内(r s 2 m s ,将 3r ~ 0 /) d
U, E c ) R f =( i E j 。 X
式 中 : “ ”表 示 集 合 的 笛 卡 儿积 ; “ × o” 表示 集合 的合 成 。
4 4 1
0 0
一l 一2 2
—
4 4 4 3 4 4 3 1
O 0 O 一 —2 2 —3 1 —1 2 —3 —3
一
O — l
+ O l 2
3
4 4 3 2 2 1
1 1 1 O
PB P B PM P M PM P S Z
Z
工 控 机 将 检 测 系统 采 集 的数 据 以及 工 控 机 对 被 控 对 象 的 处理 结 果 上 传 上 位 机 ,以 备控 制 中心
进 一 步 分 析 处理 , 同时 上 位 机 将 矩 阵 运算 后 得 出
风力发电机组最佳功率追踪自适应模糊PID控制
风力发电机组最佳功率追踪自适应模糊PID控制方明星;李月;吴立军;程靖;杜友武【摘要】针对变速恒频风力发电系统,以额定风速以下风能的最大利用率为目标,设计了基于自适应模糊PID控制的风能最佳利用追踪控制器.该控制器对叶尖速比进行控制,运行时根据实际输出的叶尖速比与其最优值间的误差及误差变化率在线实时调整PID参数,实现自整定,达到风能利用系数最佳的功率追踪目标.通过仿真对几种控制方法进行对比分析,结果表明,自适应模糊PID控制能够将风能利用系数和叶尖速比均控制在最优值附近,系统的稳态性能和动态性能都较好,控制效果优于PID 控制和模糊控制.【期刊名称】《安徽师范大学学报(自然科学版)》【年(卷),期】2015(038)002【总页数】6页(P138-143)【关键词】风力发电;叶尖速比;风能利用系数;最大风能捕获;自适应模糊控制;PID 控制【作者】方明星;李月;吴立军;程靖;杜友武【作者单位】安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000【正文语种】中文【中图分类】TP273.4引用格式:方明星,李月,等.风力发电机组最佳功率追踪自适应模糊PID控制[J].安徽师范大学学报:自然科学版,2015,38(2) :138-143.引言风能作为可再生能源,利用风力发电已成为应对能源危机和环境污染的一种重要手段,正越来越受到世界各国的重视[1-4].变速恒频风力发电技术是目前最具规模化开发条件和商业化发展前景的风力发电技术之一,已成为国内外风力发电领域的研究热点[5].变速恒频风力发电系统运行于额定风速以上、附近和以下时,分别有不同的控制目标和控制策略.当其运行于额定风速以上时,通常采用变桨距控制技术保证输出功率平稳[6];运行于额定风速附近时,要求保持转速恒定,实现恒转速运行;运行于额定风速以下时,要求风轮的转速随风速变化并保持恒定的最佳叶尖速比,实现最大风能捕获.本文针对额定风速以下,设计了一种最大风能捕获的控制器.由于风能具有随机性和突发性的特点,风力发电系统的工作点随风的变化时刻变化,表现出高度的时变、非线性特性,常规PlD控制器结构简单、使用方便、工作稳定,但需要知道系统的精确模型,不能很好地解决系统动态与静态之间的矛盾、跟踪设定值与抑制扰动之间的矛盾、鲁棒性与控制性之间的矛盾等.模糊控制是一种智能控制方法,具有控制适应性好和控制过程平滑的特点,不需要对非线性、大延迟等复杂系统建立精确的数学模型,有较强的自适应能力,抗干扰性强等优点[7-9],在风力发电系统中得到了广泛的应用[10,11].文献[12]采用模糊控制对风力机的转速进行控制,实现了转速对给定值的跟踪,但系统稳态误差较大,难以达到较高的控制精度;文献[13]提出了基于自适应模糊控制的转速控制策略,由辨识器和控制器产生电磁转矩指令,取得了较好的控制效果,但该方法需要采集一定数量的样本数据用最近邻聚类算法进行拟合,实现方法比较复杂.本文设计了将PID控制和自适应模糊控制结合起来,构成自适应模糊PID控制,既有模糊控制动态响应好、超调量小的特点,又具有PID控制精度高,能够消除静态误差的特点.为了验证该控制方法的有效性,本文基于matlab工具搭建了变速恒频风力发电机组的仿真模型,对比几种控制方法的控制效果,仿真结果验证了文中提出方法的可行性和优越性.风力发电系统是一个多变量的非线性系统,其精确数学模型的建立是十分困难的.只能深入剖析各子系统的工作状态,提取出其中重要的工作参数,用数学表达式近似拟合子系统的工作过程,并加入一些修正方法,构建出整个系统.风力发电系统可以划分为如下几部分:风速、风轮、传动系统、发电机模型等子系统.采用变速恒频风力发电装置,能大范围调节转速,以此实现因风速变化引起的功率变化,可以最大限度地吸收利用风能,控制上比较灵活,其控制系统结构图如图1所示.1.1风力发电机的捕获功率风力发电机吸收利用风能并将其最终转化为电能,风以一定的速度和方向作用于风轮上,进而转化为旋转力矩而使风轮发生转动,将风能转化为机械能,之后转动的风轮经过齿轮箱变速后驱动发电机旋转产生电能.根据贝兹理论[14],风力机捕捉风能实际能得到的有用功率输出是式中,ρ为空气密度; R为风轮半径,Cp为风能利用系数; v为风速.在风速一定的情况下,风力机捕获的有用功率ps的大小取决于风能利用系数Cp,而Cp是叶尖速比λ和桨距角β的非线性函数αδ[5,6]φ,即由式(2)可得到如图2的Cp(λ,β)函数关系曲线.由图2可知,当桨距角β固定时,只有一个叶尖速比λ对应着相应的最大风能利用系数Cpmax,随着桨距角β的增大,风能利用系数Cp逐渐减小,因此在额定风速以下,为了最大限度捕获风能,桨距角一般取零度,即β= 0°.根据贝兹理论,风能利用系数Cp的极限值约为0.593.而实际情况,Cp最大值只有0.44左右.风轮获得的气动扭矩Tr的关系式为其中,CT为气动转矩系数,w为风轮角速度.1.2 传动系统方程风力发电机组的传动系统主要是由风轮转子,低速轴,增速齿轮箱,高速轴和发电机转子构成的,传动系统的简化运动方程为其中,Jr为风轮转动惯量,n为传动比,Jg为发电机转动惯量,Te为发电机反扭矩.1.3 发电机反扭矩方程发电机模型是由发电机和电力电子器件组成的,由于电力电子器件模型结构复杂性以及动态特性较其他模块变化快,本文忽略其影响,采用绕线式三相异步发电机作为发电机的模拟对象,通过调节定子电压使发电机反力矩和转速发生变化,从而达到变速的要求.发电机反扭矩方程为其中,g为发电机极对数,m1为相数,u1为电压,c1为修正系数,wg为发电机转子转速,w1为发电机同步转速,r1和x1为定子绕组的电阻和漏抗,r2和x2为转子绕组的电阻和漏抗.在额定风速以下,风电机组主控系统一般不向变桨距执行机构发出变桨命令,机组进行变速运行以追求最大风能利用系数,此时风电机组可以视为定桨距运行,桨距角β= 0°.在式(2)中,令β= 0°,得到对式(9)求导,并令其等于0,求得当λ= 10.5时,Cp取得最大值.即在β= 0°时叶尖速比的最佳值为10.5,称作最佳叶尖速比.因此,在低风速时,只要通过控制使叶尖速比保持最佳值,就能使风能利用系数Cp达到最大值,实现最大风能捕获.2.1 PID控制PID控制器是一种比例、积分、微分并联的控制器,应用比较广泛,数学模型可用下式来表示其中,u(t)为控制器的输出,e(t)为控制器输入,在此是叶尖速比的最佳值和实际输出值的差值,即偏差信号,Kp为控制器的比例系数,KI为控制器的积分系数,KD为控制器的微分系数.2.2自适应模糊PID控制模糊控制难以消除系统稳态误差,很难达到较高的控制精度;而PID调节器的积分调节作用可以很好地消除系统的稳态误差.把模糊控制和PID调节器相结合可以增加稳态控制性能.自适应模糊PID控制是将模糊控制与常规的PID控制相结合的一种控制方法.在PID控制的基础上,采用模糊推理,在运行时根据叶尖速比的实际输出值与其最优值间的误差e及误差变化率ec在线实时调整PID参数.模糊推理的输入是误差e和误差变化率ec,输出是比例系数的调整值ΔKp、积分系数的调整值ΔKI和微分系数的调整值ΔKD,在系统运行中,通过不断检测e和ec,利用模糊规则进行模糊推理、查询模糊控制规则表,对3个参数进行在线参数调整,从而使被控对象具有良好的动静态性能.其设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,针对Kp、KI和KD三个参数分别整定.模糊推理输出三个参数的调整量ΔKp、ΔKI和ΔKD,三个调整量分别加上PID控制三个参数的初始值,得到实际PID整定参数.自适应模糊PID控制器原理如图3所示.误差e及误差变化率ec变化范围定义为模糊集上的论域[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],其模糊子集为{ NB,NM,NS,ZO,PS,PM,PB}.e、ec、ΔKp、ΔKI、ΔKD隶属度函数均如图4所示.总结工程设计人员的技术知识和实际操作经验,分别建立ΔKp、ΔΚI和ΔKD的模糊控制规则表,如表1、表2和表3所示.2.3系统仿真模型利用matlab软件中simulink模块,建立风速模型、风力机模型、传动模型、发电机模型,以及整体模型的仿真图.控制系统整体仿真框图如图5所示.本文设计的自适应模糊PID控制器通过模拟额定风速以下的自然风速,以叶尖速比的误差和误差变化率为输入量,通过调节PID控制器参数来改变发电机定子电压,从而改变风轮转速,进而改变叶尖速比以跟踪最佳功率曲线,实现最佳的风能转化效率.本文研究的风力发电机主要参数如下:风轮半径为38.5m,空气密度为1.22kg/m3,发电机电压为690V,风轮转动惯量为3.28106,切入风速为3m/s,额定风速为13m/s,切出风速为25m/s,额定功率为1.5MW.模拟风速模型取值如图6所示,变速恒频风力发电机在此风速作用下,分别采用PID控制、模糊控制及自适应模糊PID控制,分析它们各自的控制效果,得到的风力发电机组的叶尖速比曲线如图7所示,风能利用系数曲线如图8所示,风轮转速曲线如图9所示.从图7-图9可以看出,自适应模糊PID控制器相比其他两种控制器,调节时间短,动态响应速度快,稳态性能好.经过一段时间调节,自适应模糊PID控制器的输出功率峰值基本稳定在1.5MW附近,相比其他两种控制器,能更好地稳定输出功率.分别对图7中叶尖速比λ和图8中风能利用系数Cp在整个运行时间段内求均方根偏差,结果如表4所示.由表4可以看出,采用自适应模糊PID控制器得到的叶尖速比λ和风能利用系数Cp的均方根偏差均远小于其他两种控制结果,控制效果很好.由图7-图9及表4分析可得,自适应模糊PID控制不仅动态响应快、有较强的适应力,且具有较强的稳态性能.本文针对额定风速以下的变速恒频风力发电机,设计了自适应模糊PID控制器,并与模糊控制器及PID控制器的控制效果进行比较.分别针对额定风速以下,对风力发电机组的风能利用系数进行控制,并利用matlab软件进行仿真分析,由仿真结果及相关数据分析可以看出,自适应模糊PID控制相比PID控制和模糊控制,其动态响应效果好、抗干扰性强、控制稳定性高,既克服了模糊控制存在的静差,又解决了PID控制动态响应不理想的问题.该控制器提高了风电系统的响应速度和风能利用率,很好地实现了低风速下对最大风能追踪捕获的控制.【相关文献】[1] LI H,CHEN Z.Overview of different wind generator systems and their comparisons[J].IET Renewable Power Generation,2008,2(2) : 123-128.[2] HAQUE M E,NEGNEVITSKY M,MUTTAQI K M.A novel control strategy for a variable-speed wind turbine with a permanent-magnet synchronous generator[J].IEEE Transaction on Industrial Applications,2010,46(1) :331-339.[3]尹明,李庚银,张建成,等.直驱式永磁同步风力发电机组建模及其控制策略[J].电网技术,2007,31(15) :61-65.[4]赵仁德,王永军,张加胜.直驱式永磁同步风力发电系统最大功率追踪控制[J].中国电机工程学报,2009,29(27) :106-111.[5]刘其辉,贺益康,张建华.交流励磁变速恒频风力发电机的运行控制及建模仿真[J].中国电机工程学报,2006,26(5) :43-50.[6]刘其辉,贺益康,赵仁德.变速恒频风力发电系统最大风能追踪控制[J].电力系统自动化,2003,27(20) :62-67.[7] SIMOES M G,BOSE B K.Fuzzy logic based intelligent control of a variable speed cage machine wind generation system[J].IEEE Transaction on Power Electronics,2010,l2(1) :87-95.[8]方明星,崔起明,李月,等.基于Mamdani模糊自适应PID的液位串级控制系统设计[J].安徽师范大学学报:自然科学版,2014,37(2) :139-141.[9] GALDI V,PICCOLO A,SIANO P.Designing an adaptive fuzzy controller for maximum wind energy extraction[J].IEEE Transaction on Energy Conversion,2008,23(2) :559-569.[10]张新房,徐大平,吕跃刚,等.大型变速风力发电机组的自适应模糊控制[J].系统仿真学报,2004,16(3) :573-577.[11]李岚,王秀丽.风力发电系统有功功率模糊控制器的设计[J].太阳能学报,2007,28(11) :1272-1277.[12] PRATS M A M,CARRASCO J M,GALVAN E,et al.Improving transition between power optimization and power limitation of variable speed,variable pitch wind turbines using fuzzy control techniques: 21st Century Technology and Industrial Opportunities [C].Nagoya,Aichi,Japan: 26th Annual Conference of the IEEE Industrial-Electronics-Society,2000:1497-1502.[13] ZHANG Xinfang,XU Daping,LIU Yibing.Intelligent control for large-scale variable speed variable pitch wind turbines[J].Journal of Control Theory and Applications,2004,2(3) :305-311.[14]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002:128.。
风力发电机叶片等效载荷计算及载荷谱分析

风力发电机叶片等效载荷计算及载荷谱分析米良;聂国林;程珩【摘要】风力发电机叶片部位通常受到随机变幅载荷的作用,所受随机载荷的随机性和无序性给载荷数据的处理带来了很大的困难.当前的数据处理方法通常是将随机变幅载荷转化为等效恒幅载荷进行分析,但由于其未能考虑低于疲劳极限的载荷对疲劳损伤所产生的影响故而会产生较大误差.针对上述问题,提出一种基于模糊理论的等效载荷计算方法,引入恰当的隶属函数,充分考虑低于疲劳极限的载荷对疲劳损伤所造成的影响,更加符合实际情况,以期提高等效载荷的计算精度.%The blade of wind turbine is usually subjected to random variable amplitudeload,which makes it difficult to process the load data.The current data processing method usually transforms the random load into equivalent constant amplitude load to reduce the data processingcapacity.However,the current method of equivalent load calculation fails to take into account the influence on the fatigue life made by the stress amplhude below the convention fatigue limit.So there is a large error in the equivalent load calculation by the current method.In view of the problems above,It properly considers the effects on fatigue life caused by load stress amplitude below the fatigue limit and presents a method of equivalent toad calculation by introducing the appropriate membership function based on fuzzy theory,which is more close to the actual situation.Thus improves the accuracy of the equivalent load calculation.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)003【总页数】3页(P141-143)【关键词】模糊理论;等效载荷;隶属函数;程序载荷谱【作者】米良;聂国林;程珩【作者单位】太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原030024;太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原030024;太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原030024【正文语种】中文【中图分类】TH16;TK83风力发电机叶片是风电机系统中的重要工作部件,承载了主要的风力载荷,最容易发生疲劳破坏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中图分 类号 :H1 ,M35 文 献标 识码 : T 6T 1 A
人 民生活水平 。如果设备在运行工作中发生故障和安全事故 , 会
给企业带来 巨大的经济损失。 以对风力发 电设备 的监测 与维护 所 管理对企业来说是比较重要的。
2风力发 电设备状态评价主要指标
tno idgnrt gst n nea ae s mfr q im n s u e pTe aiufcos o i o fwn eeai da vlt ds t o u e tt sist .hnv o. atrfr n ea u ye e p a s u t r ,  ̄ ip c rn i au o egnrt gst eeau e c ecm ii HP uz o peesv — m atunn s sf t eean vla di sa o bnn A fz cm rhni e gt h t i ea r t n l g y e v ut nm to yapyn ew y rm“eo p .ial haheau igv u fr ahss mo l o a ai ehdb l gt afo blwt t " n y e t v an e o c t p i h oo F l l lt l a e ye f te e iot ndadyth hl eau i fr idgnr igst n hdTeea pe hwta h ts ba e , e tew oe v ao o n eea n f i e. xm l so t s i n lt n w t e ii s h s s h teapiao fzycm rh ni v u i ns u eaut no idgnr i qim nsi h p l t no uz o pees eea ao i t s v ao wn eea n eu e t s ci f v lt n t a l i f t g p failMe w i t rvds wt ert a giei ekn fr e t z i aneac t e e b . a hl ipoie i t oei ud se i ut r pi a o m tnn es a - s e n e hh c l n g h o mi n i t r t E dipoi fr e e om neoe u m n. Ya rvn ut r  ̄ r ac q ie t n m g h p f p
张登峰 郝 伟 郝 旺身 董辛曼 ( 州大学 振 动工 程研究所 , 州 4 0 0 ) 郑 郑 5 0 1
Ap l a in o u z h or t t s e a u t n o n p i t f z y t e y i s a u v la i f c o f n o wid p we e e a i q ime t o r n rt g on e up n
【 要】 摘 在分析风力发 电机组各功能结构关系基础上 , 将机组进行结构功能划分 , 以此构建其评
价设备 状 态体 系。 然后将 A P 模 糊综 合评判 方法相 结合 , H一 对风 力发 电设备 运行 状 态的各 个影响 因素使
用“ 下 而上 ” 方式 , 级进行评 价 , 从 的 分 最后得 到风 力发 电设备 各 系统的健康 评价值 , 而完成 了风力发 从
Z HANG e g f n , D n — e g HAO W e , i HAO W a g s e DONG Xi— n n — h n, n mi
( eerhIs tt o irt nE gn eigZ e gh uU ies yZ e gh u4 0 0 , hn ) R sac ntue f ba o n ier ,h n zo nvri ,h n zo 5 0 1C ia i V i n t
1 引言
风 力发 电设 备是风力 发电的 主要 装置及风 电技术 中的核
心, 它的应用越来越广泛 , 它的运行好 坏直 接影 响着企业效益和
实现现实运行的提取 。因此 , 如何构建一套有效和实用 的风力发 电设备评价体系 , 以此来对设备所处 的状态进行状态评价 , 我 是
们关注的重点之一 。
电设备的整体状态评价。实例结果表明, 模糊综合评判应用在风力发电设备状态评价中是可行的, 同时 评判结果为我们掌握机组运行状态及对设备性能进一步改进, 提供 了一定的依据。
关键 词 : 力发 电机 组 ; 风 模糊 综合评判 ; 状态评 价
【 b ta t h u ci t cuedv i O ar do t ae na a zn f n t ns u tr rZ A src 】T e n t ns utr ii o W Scri u sdO l ig u ci t cue e f o r sn e b n y o r
第 1 期 1 21年 1 01 1月
文章编号 :0 13 9 (0 ) 0 7 — 3 10 — 9 7 2 1 1- 0 5 0 1 1
机 械 设 计 与 制 造
M a h n r De i n c iey sg & Ma f cu 价 中的应用 水