面向金丝球焊线机的打火烧球控制系统设计
焊机控制系统设计及其应用

焊机控制系统设计及其应用随着科技的不断发展,精密制造工业已经成为现代工业的重要组成部分之一。
在这个领域之中,焊接是最常用的工艺之一,可以在汽车制造、桥梁建设、船舶制造、航天航空和电子制造等领域中得到广泛应用。
控制系统在焊接的过程中也扮演着至关重要的角色,通过对焊接设备的参数进行控制,实现焊接过程中的自动化操作、优化控制和快速反应。
本文将着重讨论焊机控制系统设计及其应用,为读者深入了解这个领域提供一些参考。
一、系统设计1. 基本原理焊接控制系统主要用于控制焊枪内的电流,焊接过程中的温度、传感器反馈等参数。
焊机控制系统的基本原理是在焊接过程中通过调整焊枪内部电流波形,控制焊接过程中的电势差、电流、电弧长度、温度等参数。
在焊接过程中,电路板会根据传感器的反馈来进行修正和调整。
2. 控制电路控制电路是焊机控制系统中最重要的部分,它决定了焊接过程中的电流、电压、电弧长度等关键参数。
在常规的焊接设备中,控制器主要由两个模块组成:电流传感器和调节器。
调节器的主要功能是对电路中的电流和电压进行调节,而电流传感器则用于检测电路中的电流强度和幅度。
3. PLC编程在现代的焊接控制系统中,往往使用可编程逻辑控制器(PLC)进行编程。
PLC最常用于焊接操作程序的编写和调试,可根据不同的焊接需求、焊接参数和检测表现来进行编程。
PLC程序可用于控制焊接电极的转动、位置修正等功能,提高焊接效率和质量。
二、应用研究1. 焊接质量控制焊接质量控制是焊接过程中最重要的问题之一。
通过使用焊机控制系统,可以实现对焊接过程中的电路参数、传感器反馈、反馈环路和电路修正等关键部分的控制。
因此,可以减少焊接过程中的不良品率、焊接受创面、线熔点位置等问题,从而提高焊接质量和寿命。
2. 机器人焊接在许多大规模生产过程中,通常会使用机器人进行自动化焊接。
机器人焊接在优化焊接过程、提高生产效率和减少人工干预方面具有很大优势。
使用焊机控制系统进行机器人焊接会得到更高的生产效率和更高的产品质量。
金丝球焊接工艺

金丝球焊接工艺随着金丝球焊技术的发展,金丝球焊已经成为目前光器件内部微小元件电路连接的主要焊接方式。
随着速率的提升,光器件封装对于金丝球焊的要求也越来越高。
因此,我们的工艺人员有必要从金丝球焊的原理和设备上有更深入的认识,我们的一线金丝球焊员工必须对焊接过程、焊接方法和焊接质量的评定有一定的了解。
金球金丝在瞬间高电压下产生大电流使金丝自身溶化,并在尾部形成的金球,英文简称FAB,如图1图1 图2金丝球焊是利用压力,功率,时间,温度和超声波能量使得金球和被焊接金属表面形成共晶层,以金丝连接元件达到元件间电路连接之目的的方法,如图3。
图3劈刀金丝球焊过程中所用到的将金丝焊接到焊盘上的锥形载体,主要成分是氧化铝陶瓷材料,英文名称Capillary,如图2。
球径金丝球焊工艺中所形成的实际球型的直径,如图4中A所示。
球厚金丝球焊工艺中所形成的实际球型的厚度,如图4中B所示。
弧高金丝球焊工艺中所形成的从焊盘到金丝弧顶的高度,如图5中C所示。
鱼尾宽度和长度金丝球焊工艺中所形成的第二焊点鱼尾状焊接面的宽度和长度,如图6中D和E所示。
金丝球焊机类型,工作环境及其组成结构业内目前用的金丝球焊设备有全自动和半自动两种备,图7-1是KaijoF880型全自动球焊机;图7-2是Westbond7700型半自动球焊机。
图7-1图7-2设备要求a) 整机具有可靠接地系统;b) 超声时间:分级可调;c) 超声功率:分级可调;d) 焊接压力:分级可调;e) 烧球电流:分级可调;f) 烧球时间:分级可调;g) 烧球尾丝长度:可手动调整或分级可调;h) 焊接温度:0 –250℃可调;i) 显微镜:5‐50倍可调整,焦距可调整工作环境:万级以上的无尘室。
金丝球焊机结构按照设备功能来分可以分为:烧球系统、输线系统、加热系统、超声传导系统、目视系统、软硬件操作系统。
烧球系统球焊机利用打火杆产生的瞬间高电压溶化金丝形成金球。
输线系统保证金丝与焊接面间的角度不变,每次出线的长度一致。
全自动金丝球焊机的改造及应用

啦圃
( 第1 期 总 8 )⑥ 6
・
材料 加 工 与设 备 ・
电 子 工 业 毫 用 设 备
咖mI l 伽 P.lc I斑_ 1l协 曩 f ;u D
-
片打 线 后 表 面 点绝 缘 胶 保 护 芯 片 表 面 的特 殊 工 艺 流 程 随之诞 生 , 为此 将 一些 速度 慢 、 位精 度 差 、 定 成
e e nd b nd pa sw ela n t h i h i k ng tr a o d a l sbo d pic s s rn i .The e ry f l— u o a i o d wie bo d rc n a l ul a t m tc g l — r n e a y
顶 入工 作 台 , 步进 装 置运送 框 架 以逐 个单 元 步进 到 点胶 位置 上 夹具 定位 。 当框 架 中 的全 部单 元 点胶完
收 稿 日 期 Biblioteka 01 —62 2 00 —8球 焊 机 这 种 高 速 度 、高 精 度 的 自动 化 设 备 的 精 确
度 、 定 性和 速 度 等 性 能要 求越 来越 高 。早 期 的全 稳
自动 金 丝 球 焊 机 已不 能满 足 高精 度 打线 的 工 艺 要
求, 逐渐 被 淘 汰报 废 。 为 了 适 应 I 封 装 产 品 中 的特 殊 工 艺 要 求 , C 芯
sv s ns r i e dipe e .As a r s l.t e pa e r s n st y tm o p iin.o r to h o y n e o - e u t h p rp e e t he s se c m osto pe a i n t e r a d us ff ul
超声波金丝球焊线机
超声波金丝球焊线机超声波金丝球焊线机的组成与使用基本原理超声波金丝焊线机的基本原理是在超声能量、温度、压力的共同作用下形成焊点,其工艺过程可简单表示为烧球——焊——拉丝——二焊——断线——烧球。
主要组成超声波金丝球焊线机主要由以下六部分组成(1).送线系统:整个送线系统,金线放置在封闭的玻璃罩中,注意防尘保护。
金线的安装:把金线筒座安装在机器正上方的安装位置上,将导丝管的小头穿过筒座中间的橡胶固定环,把金线筒放在金线筒座上,调整导丝管的伸缩量,让导丝管的大头应高于金线筒的上端20~25mm;金线从导管穿出,经过防线系统,最后进宝石孔,线夹和瓷嘴。
当需要更换金线时,注意金线的放置方向,应该带红色标记的朝下,绿色抽头朝下。
瓷嘴的安装:将瓷嘴插入换能器孔,用镊子背或是其他工具固定住换能器头部,用螺丝钉刀将螺丝拧紧。
(2).显微镜系统:通过调节显微镜,在焊线时可以看清楚支架和芯片电极。
(3).打火杆部分:焊线机工作时,通过打火杆放电,使金线烧成结成球。
(4).夹具部分:所焊接支架不同,夹具也不同。
如果需要焊接大功率芯片。
如果需要焊接大功率芯片,则需要换上大功率夹具。
(5).控制面板:左边面板包括复位键,超声波振动指示,一焊、二焊的时间、功率参数调整旋钮,测试按钮,电源开关按键,照明灯调节旋钮,右边面板包括温度显示。
温度设定及调整,烧钱的时间和电流设定,压力(一压,二压)大小测试,功能设定与调整。
复位:可以是系统恢复到初始状态,方便进行调节。
一焊:是指对芯片电极的焊接。
二焊:是指对支架的焊接。
超声功率:控制超声波能量的大小,焊线时,利用超声波产生热量,使金线和焊接面软化,形成分子相互嵌合合金。
时间:控制超声能量作用的时间,一般的焊线机时间应该控制在1~255ms,焊接时间太短是无法形成良好的合金的,焊线时间过长则导致焊线拉力不够或芯片电极损伤。
测试:按下此键时,机器会发出超声波,一般在调整机器时用,以及需用超声波振动疏通瓷嘴时使用。
焊线机焊接压力控制系统设计开题报告
1
2.准备情况(查阅过的文献资料及调研情况、现有设备、实验条件等) 研究概况及发展趋势
随着计算机技术的迅猛发展, 计算机在工业控制中的应用也越来越广泛。如今计算 机控制已经广泛应用于各行各业。通过不断的实践、总结及创新,计算机控制理论也不 断地得到完善,涌现出各种先进实用的计算机控制算法。目前,国内外主要采用典型 PID 控制、最优控制、自适应控制和智能控制理论来实现压力控制系统的算法设计。 (1) 典型 PID 控制理论 PID 控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。 目前大多数工业控制器都是 PID 控制器或其改进型。尽管在控制领域,各种新型控制 器不断涌现,但 PID 控制器还是以其结构简单、易实现、鲁棒性强等优点处于主导地 位。对 PID 控制器的设计和应用,核心问题之一是参数的整定。近年来,PID 控制器的 参数整定方法和技术也在不断的发展之中,常用的 PID 参数整定方法有:常规 Z-N 整 定法、基于模糊控制的 PID 参数整定法、基于小波神经网络的 PID 参数整定法以及基 于遗传算法的 PID 参数整定法等。这些整定方法利用了其它先进的控制理论,使得 PID 控制器工作更稳定,效果更佳。 (2) 最优控制理论 在 20 世纪 50 年代后期,贝尔曼(Bellman)和庞特里亚根(Potryagin)等人提出了 最优控制理论。 该理论指出许多设计问题可以转化为最优化问题。最优控制要解决的问 题主要可以归结为: 其一, 利用最优控制的办法, 寻找最优设定值或最优的工况: 其二, 设出最优调节器,计算机参与在线控制,保证工况稳定在设定值上。由于最优控制通常 需要繁杂的数学运算, 需要精确的数学模型,尽管最优控制的理论研究达到了相当高的 水平,但在工业中应用还是有一定的难度。随着大批性能优良、价格低廉的微型计算机 投放市场,以及数字滤波、系统辨识的深入研究,最优控制将会越来越广泛地应用到实 际工程中去。 (3) 自适应控制理论 所谓的自适应控制就是不论外界发生巨大变化或系统产生不确定性, 控制系统能自 行调整参数或产生控制作用, 使系统仍能按某一性能指标运行在最佳状态的一种控制方 法。用数字计算机来实现一个控制器时,就能够实现比较复杂的控制算法,自然包括参 数估计方法和控制设计算法。用这种方法可以获得自适应算法,即确定数学模型,实行 控制系统的在线设计。 自适应控制的研究起源于 20 世纪 50 年代中期, 20 世纪 70 年代, 自适应控制的工业应用得到论证,职得了重要的进展。在今天,自适应控制理论在工业 控制领域仍然有着广泛的应用。
数控火焰切割机高性能电容式自动调高系统设计
2 5 .O
3 O .O
2 6 4
3 O .5
2 8 5
3O 2
24 .3
29 .2
2 1 5
30 4
25 0
3O .8
±0 0 .8
±O O . 8
3 5 .0
4 0 .0 4 5 .O
3 4 5
4 6 0 4 O 5
3 7 4
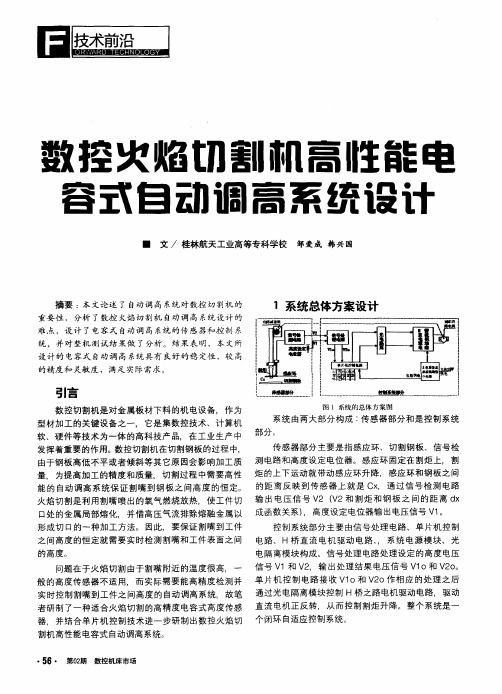
给单 片机控 制电路 处理,根据处理结果通过光 电隔离 控制 H桥直 流 电机 的运动,在 H桥直 流 电机 驱动 电
路里 面设计 一个 用于采样 电机 电流 的采样 电阻,采样 电阻 的一端 电压送 给 A D处 理,然 后 由单片机 根据 / 采样 电阻的 电压值来监控电机 是否正 常工作。
4 2 0 4 8 5
3 3 5
39 .5 44 5
3 5 .7
3 3 9 4 5 . 1
34 .2
40 .4 44 8
士0 0 8
软、硬件等技术 为一体 的高科 技产品,在工业生产 中 部分。 传 感 器 部 分 主 要 是 指 感 应 环 、 切 割 钢 板 、 信 号 检 发挥着重要的作用。 数控切割机 在切割钢板 的过程 中,
由于钢板高低不平或者倾斜 等其它原 因会影响加工质 测 电路 和高度 设定 电位器。感应 环固定在割炬上,割 量、 为提高加工 的精度 和质量 ,切割过程 中需要高性 炬 的上 下运动就 带动 感应环 升降,感应 环和钢板 之间 x 能 的 自动调 高系统保 证割 嘴到钢板 之 间高 度的恒定。 的距离 反映到传 感器 上就是 C ,通过信 号检测 电路 2 V x 火焰切割是利 用割嘴喷 出的氧气燃烧放热,使工件切 输 出电压 信号 V ( 2和 割炬 和钢 板之 间的距 离 d ,高度设定电位器输 出电压信号 V 。 1 口处 的金 属局部 熔化,并借高压气流排除熔融金属 以 成函数 关系) 形成切 口的~种加工方法。 因此,要保证割 嘴到 工件 控制系统部分主要 由信号处理 电路、单片机控制 之 间高度 的恒定 就需要实时检测割嘴和工件表面之 间 电路、H桥 直流 电机驱 动 电路 、 ,系统 电源模块 、光
火炬自动点火控制系统设计

前言可编程逻辑控制器(PLC)是八十年代发展起来的新一代工业控制装置,是自动控制、计算机和通信技术相结合的产物,是一种专门用于工业生产过程控制的现场设备。
由于控制对象的复杂性,使用环境的特殊性和运行的长周期连续性,使PLC在设计上有自己独特的特点:可靠性高,适应性广,具有通信功能,编程方便,结构模块化。
火炬装置是石油、化工、钢铁及煤炭等行业中常见的一种安全环保装置,主要用来焚烧生产过程中排放的尾气和有机物,以免造成环境污染。
本系统依托某化工企业工艺特点与要求,设计了一套高空火炬自动点火系统,这套装置由两部分构成,一部分为酸性气火炬,用于焚烧处理酸性气体.火炬是石油化工企业中常见的一种安全环保装置,主要是用来燃烧工艺排放尾气中的有机物,以避免造成环境污染,或在工况不正常时,确保装置的安全。
工艺尾气中的有机物时有时无,在工况正常时,尾气中不含有机物,因此,适当时候点燃或熄灭燃烧嘴,就显得极为必要。
为此设计了火炬自动点火控制系统,在尾气含有机物时点燃烧嘴,尾气中不含有机物时熄灭火炬,就可以节省大量燃料气,消灭长明灯,经济效益十分显著。
1.系统概况石化公司化工一厂火炬系统是在生产装置紧急停车的情况下,需要对紧急排放的气体进行燃烧的安全保护性装置,同时也用来燃烧生产过程中排放的有毒废气。
1.1工作过程当燃气排放时,火炬总管内的流量信号升高到给定值时,系统认为有燃气向火炬排放,由PLC+PC计算机等组成的控制系统,控制高压发生器和调理器输出高电压,使高空点火器内的电梯发生装置产生面状电弧火源,并打开高压燃气电磁阀向高空点火器内喷入燃气,同时与空气混合被点燃,自高空点火器顶部喷出火焰,并引燃火炬顶部的排放燃气。
火炬点燃后,由火炬火焰遥测器探得火焰信号,反馈给控制系统,停止向高空点火器供给高压电和燃气,点火过程完成,系统处于监控状态。
当因某种原因,火炬自动熄灭,排放燃气依然存在时,系统将自动重新点火,以保证火炬点燃。
超声波金丝球焊线机焊接压力控制系统设计
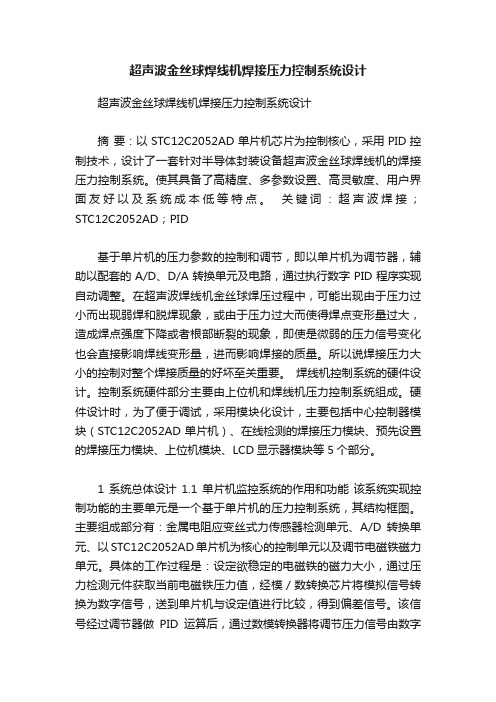
超声波金丝球焊线机焊接压力控制系统设计超声波金丝球焊线机焊接压力控制系统设计摘要:以STC12C2052AD单片机芯片为控制核心,采用PID控制技术,设计了一套针对半导体封装设备超声波金丝球焊线机的焊接压力控制系统。
使其具备了高精度、多参数设置、高灵敏度、用户界面友好以及系统成本低等特点。
关键词:超声波焊接;STC12C2052AD;PID基于单片机的压力参数的控制和调节,即以单片机为调节器,辅助以配套的A/D、D/A转换单元及电路,通过执行数字PID程序实现自动调整。
在超声波焊线机金丝球焊压过程中,可能出现由于压力过小而出现弱焊和脱焊现象,或由于压力过大而使得焊点变形量过大,造成焊点强度下降或者根部断裂的现象,即使是微弱的压力信号变化也会直接影响焊线变形量,进而影响焊接的质量。
所以说焊接压力大小的控制对整个焊接质量的好坏至关重要。
焊线机控制系统的硬件设计。
控制系统硬件部分主要由上位机和焊线机压力控制系统组成。
硬件设计时,为了便于调试,采用模块化设计,主要包括中心控制器模块(STC12C2052AD单片机)、在线检测的焊接压力模块、预先设置的焊接压力模块、上位机模块、LCD显示器模块等5个部分。
1 系统总体设计1.1 单片机监控系统的作用和功能该系统实现控制功能的主要单元是一个基于单片机的压力控制系统,其结构框图。
主要组成部分有:金属电阻应变丝式力传感器检测单元、A/D转换单元、以STC12C2052AD单片机为核心的控制单元以及调节电磁铁磁力单元。
具体的工作过程是:设定欲稳定的电磁铁的磁力大小,通过压力检测元件获取当前电磁铁压力值,经模/数转换芯片将模拟信号转换为数字信号,送到单片机与设定值进行比较,得到偏差信号。
该信号经过调节器做PID运算后,通过数模转换器将调节压力信号由数字信号转换成模拟信号。
由于螺线管线圈中的电压与电磁铁磁力成正比,通过调节螺线管中的电压大小,进而控制电磁铁磁力大小,达到稳定电磁铁磁力大小的目的。
EFO打火成球电路设计
- 30 -EFO打火成球电路设计杨健曾聚峰彭俊捷(桂林电子科技大学机电工程学院,广西桂林541004)【摘要】研究设计的EFO(打火杆)打火成球电路是自动焊线工艺里面重要组成部分,打火电路是以STM32电路作为主控,通过电源供电电路提供电路中所需各种电压;经过高压驱动电路来产生击穿空气所需电压;根据电压的大小和电压的持续时间来确定烧球电流的给定,再由电流检测电路与给定电流进行检测和系统形成闭环控制电流大小,进而控制金丝烧球的质量。
在设计中考虑了人身安全和保护设备增设保护电路,无论打火烧球是否完成,20 ms后停止整个打火烧球电压输出。
【关键词】自动焊线;打火成球;系统闭环;安全稳定【中图分类号】TN3【文献标识码】A【文章编号】1008-1151(2019)09-0030-03EFO Fire Ball Circuit DesignAbstract: The EFO ignition balling circuit is an important part of the automatic welding wire technology. The main control of the ignition circuit is the STM32 circuit, which provides all kinds of voltage needed in the circuit through the power supply circuit; generates the voltage needed to break down the air through the high-voltage driving circuit; determines the given current of the balls according to the magnitude of the voltage and the duration of the voltage, and then detects the electricity by the current. The circuit and the given current are detected and the system forms a closed-loop control current to control the quality of the gold wire burning ball. In the design, the personal safety and protection devices are added to the protection circuit. No matter whether the firing ball is completed, the whole firing output voltage is stopped after 20 ms.Key words: automatic welding line; strike ball; closed loop system; safety and stability我国的半导体行业与国外的半导体技术水平相比有大幅度的差距,我国的半导体相关的技术、器件、设备一直是从外国进口,这对于我国的工业发展和战时物资是相当不利的,应大力发展半导体行业。
焊线机焊接压力控制系统设计任务书
一、毕业设计(论文)的内容超声波金丝球焊线技术是一种在超声能量、压力和温度的共同作用下,实现金丝键合焊接,进而实现芯片内部引线互连的技术。
在焊接过程中,焊接压力是其中一项重要参数,焊接压力大小,焊接压力持续时间等过程参数对焊接点的质量起决定作用,因此,对焊接压力的控制成为焊线机的关键技术之一。
本设计主要对焊线机焊接压力控制系统进行了研究,根据要求,确定整体工作原理,并对方案进行比较和研究;确定硬件的设计,包括:电源模块、MCU模块设计、DAC模块设计、驱动模块设计、压力检测模块设计、显示模块设计等,制作条件允许的相关硬件;编写软件并调试。
设计中对控制器电路中一些主要参数要有分析和计算。
本课题的主要研究内容包括以下几点:1、学会并能娴熟利用图书馆、互联网获取所需技术资料。
阅读并翻译一定数量的中外文献。
做到阅读能理解,翻译通顺准确。
2、认真了解金丝球焊线机压力控制系统的构成、工作原理及特点,掌握自动控制原理、单片机原理与控制技术和电力电子技术,设计一个基于单片机的金丝球焊线机压力控制系统,包括电源模块、MCU模块设计、DAC模块设计、驱动模块设计、压力检测模块设计、显示模块设计等。
设计中考虑单片机系统的可靠性,抗干扰能力,维修方便,能耗低,性价比高等特点。
3、制作基本的演示样机,编写控制软件,并进行基本调试或通过仿真验证。
撰写论文,论文中包括详细的原理图、程序框图和电路图。
二、毕业设计(论文)的要求与数据1.收集相关文献,调研常见金丝球焊线机压力控制方法,对各种控制方案进行比较、优选;根据金丝球焊线机压力控制特点和要求,设计一个基于单片机的金丝球焊线机压力控制系统,实现金丝球焊线机压力控制功能,控制器应简单,操作性好,可靠性高,安全。
2、通过相关的调查研究,选择合适的控制方案和具体元件。
3、制作相关硬件,编写软件并调试,翻译相关外文文献,撰写设计论文,论文要求完成工作原理及组成有详细的说明,要有工作原理框图及说明,电原理图,PCB图,调试和检测的说明,元件清单等。
封装打线线体烧球原理
封装打线线体烧球原理
封装打线线体烧球是指在集成电路封装过程中,通过打线机将金属线连接芯片的焊盘,然后进行热处理,使金属线与焊盘形成可靠的连接。
这一过程是封装技术中的重要环节,下面我将从原理、流程和应用三个方面进行详细解释。
首先,让我们来看一下封装打线线体烧球的原理。
在封装打线过程中,金属线(通常是金、铝或铜等材料)通过打线机器被连接到芯片的焊盘上。
然后,通过热处理(通常是热压接或者热压焊接),金属线与焊盘之间形成牢固的焊接连接。
这样就完成了芯片封装中的线体连接。
其次,我们来了解一下封装打线线体烧球的流程。
首先,将芯片放置在封装基板上,然后通过打线机器进行线体连接。
接着,经过热处理,金属线与焊盘之间形成牢固的焊接连接,这个过程通常被称为烧球。
最后,进行封装底座的安装,封装胶的注射等工艺,最终完成整个封装打线线体烧球的流程。
最后,我们来探讨一下封装打线线体烧球的应用。
封装打线线体烧球技术广泛应用于集成电路封装行业。
随着电子产品的不断发
展,对芯片封装的要求也越来越高,而封装打线线体烧球技术正是为了满足这一需求而诞生的。
它可以有效地提高芯片封装的可靠性和稳定性,保证芯片在使用过程中的性能和可靠性。
总的来说,封装打线线体烧球是集成电路封装过程中的重要环节,通过打线连接和热处理形成可靠的连接。
它在集成电路封装行业中有着广泛的应用,为电子产品的发展提供了可靠的支持。
手动金丝球焊机说明书

手动金丝球焊机说明书HKD-2320TS超声波金丝球焊机使用说明书目录1.概述1.1用途 (1)1.2特点 (1)2.主要技术参数2.1电源 (1)2.2超声波发生器 (2)2.3换能器 (2)2.4可焊金丝线径与线轴同径 (2)2.5焊接压力 (3)2.6温度 (3)2.7成球 (3)2.8机械参数调节范围及运行周期 (3) 2.9光学系统 (4)2.10环境要求 (4)2.11机器外形尺寸与重量 (4)3.主要结构及部件功能介绍 (5)3.1主要结构 (5)3.2主要部件功能 (5)4.工作原理 (14)4.1超声波焊接原理 (14)4.2机器工作循环过程 (14)4.3操作模式表 (16)5.机器安装 (18)5.1开箱及显微镜安装 (18)5.2劈刀安装 (18)5.3金丝安装 (19)6.操作及调整 (19)6.1操作 (19)6.2焊头初始位置高度及打火杆调整 (20) 6.3工作模式、高度、跨度调整设定 (21) 6.4线夹调节 (25)6.5尾丝及金球大小调节 (26)6.6弧度调节 (28)6.7弧形设定 (28)6.8二焊补球设定 (29)6.9自动过片步数选择 (29)6.10焊头压力调节及测试 (30)6.11超声功率及时间调节 (30)6.12温度调节 (30)6.13照明灯调节 (31)6.14显微镜调节 (31)7.机器日常保养 (32)7.1劈刀清洗 (32)7.2线夹宝石片清洗 (32)7.3触点清洁 (32)7.4放线系统及打火杆清洁 (32)7.5重要机械部分保养 (33)7.6显微镜保养 (33)8.焊接相关常识 (33)8.1劈刀 (33)8.2金丝 (34)8.3焊接四要素 (34)8.4劈刀堵塞处理 (34)9.故障解决方案 (36)9.1常见故障排除 (36)9.2技术支持 (37)附页接线图、接线表发光二极管理工作台①使用说明(选购该种工作台的客户适用)机器及配套备件、附件清单(装箱清单)合格证明书【概要】●用途WT系列超声波金丝球焊机主要应用于发光二极管、中小型功率三极管、集成电路及一些特殊半导体器件等内部引线的焊接。
激光焊机电控系统设计报告

激光焊机电控系统设计报告1. 引言激光焊接技术因其高精度和高效率而受到广泛应用。
而良好的电控系统对于激光焊机的稳定性和性能起着至关重要的作用。
本报告旨在详细描述激光焊机电控系统的设计。
2. 系统架构激光焊机电控系统主要由以下几部分组成:1. 控制主机:负责整个系统的控制和管理。
通过与其他部件的通信,来实现激光焊接过程的控制和监控。
2. 电力控制模块:负责对激光焊机的电力进行控制,包括电源调节、电流传感和功率控制等功能。
3. 光学系统:包括光纤、镜片、反射镜等光学元件。
光学系统通过控制光线的聚焦和方向,实现激光束的精确定位和焦距控制。
4. 传感器系统:用于检测焊接过程中的温度、压力、速度、位置等参数。
通过传感器的信号反馈,电控系统可以对焊接过程进行实时调整和监控。
5. 数据采集和处理系统:负责对传感器采集到的数据进行处理和分析,并生成相应的控制指令。
同时,还可以通过网络接口与其他设备进行数据交互和通信。
3. 控制策略激光焊机电控系统的控制策略主要包括以下几个方面:1. 脉冲控制:根据焊接过程的需要,通过调整激光器的脉冲频率和宽度,实现对焊接深度、速度和质量的控制。
2. 感应控制:通过传感器检测焊接过程中的温度、压力和位置等参数,实时反馈给控制主机。
控制主机可以根据这些数据来调整焊接参数,以保证焊接质量和稳定性。
3. 聚焦控制:通过加工控制系统实现激光焦点的实时操纵,保证焊接精度和焊接质量。
4. 功率控制:根据需要调整激光器的功率输出,以适应不同焊接材料和焊接工艺的要求。
4. 硬件设计4.1 控制主机控制主机采用嵌入式处理器作为核心,配备足够的存储和运算能力。
它负责整个系统的控制和协调,并与其他部件进行信息交互。
4.2 电力控制模块电力控制模块用于激光器的电源调节和功率控制。
它采用高精度的电流传感器和电源调节器,实现对激光器工作电流和功率的精确控制。
4.3 光学系统光学系统主要由光纤、镜片、反射镜等光学元件组成。
全自动金丝球焊机的改造及应用

全自动金丝球焊机的改造及应用张甲义【摘要】随着IC封装材料和技术的进步,产品引脚、焊线、焊盘尺寸正逐渐变小,芯片上焊盘间距不断减小,早期的全自动金丝球焊机已不能满足现有产品的工艺和质量要求,特提出将其改造为点胶机的设想.简要介绍了全自动金丝球焊机改造成时间/压力型全自动点胶机的系统组成和工作原理,以及其在IC封装芯片表面点胶特殊工艺中的应用,并对优缺点、影响点胶质量的因素等进行了分析,提出了改进提高的措施.【期刊名称】《电子工业专用设备》【年(卷),期】2010(039)007【总页数】4页(P43-46)【关键词】金丝球焊机;点胶机;芯片表面点胶技术【作者】张甲义【作者单位】天水华天科技股份有限公司,甘肃,天水,741000【正文语种】中文【中图分类】TN605随着IC封装材料和技术的进步,芯片集成度的增加,产品的引脚、引线、焊盘尺寸等越来越小,芯片接线的间距也越来越密,焊球的直径也不断减小,为了保证产品质量,提高生产效率以及快速适应市场日新月异的变化,对封装过程中全自动金丝球焊机这种高速度、高精度的自动化设备的精确度、稳定性和速度等性能要求越来越高。
早期的全自动金丝球焊机已不能满足高精度打线的工艺要求,逐渐被淘汰报废。
为了适应IC封装产品中的特殊工艺要求,芯片打线后表面点绝缘胶保护芯片表面的特殊工艺流程随之诞生,为此将一些速度慢、定位精度差、成品率和利用率低的早期全自动金丝球焊机,通过增加机械装置和控制系统将其改造成为时间/压力型全自动点胶机,成本低廉、操作方便、易于维护,可以满足加工打线后的芯片表面点胶产品工艺要求,这样既能达到设备资源合理利用,又在点胶工艺中应用技术方面进行了有益的探索,并取得较好的效果。
1 改造成的时间/压力型点胶机的系统组成和工作原理1.1 系统组成机械系统:包括点胶机械装置组件,工作台定位、夹具、步进装置,左、右升降机,顶料机构和机器箱体框架。
控制系统:包括电源、伺服电动机等执行原件及其驱动线路板,以及由PC机及其相应的硬件、软件所构成的控制系统,其中包括控制开关和各种指示器。
全自动金丝球焊工艺中安全球偏移分析

全自动金丝球焊工艺中安全球偏移分析摘要:键合工序在微组装中属于关键工序,要实现高效率、高一致性的批量化生产,自动化键合是必不可少的。
在微波组件中,常用金丝键合来实现芯片与基板、基板与基板之间的互连。
全自动金丝球焊是互连方法的一种,本文主要针对量产过程中出现的安全球偏移问题展开分析,即键合机的机械震动、安全球参数设置不当、劈刀和金丝的选型、主线的线弧参数设置不当等。
本文通过在Palomar 8000i全自动金丝球焊机上进行系列试验验证,主线的线弧参数设置不当是造成安全球偏移的主要原因,并提出相应的改进措施。
关键词:全自动金丝球焊;安全球偏移;线弧参数1 引言在微电子封装中,常用的芯片互连工艺[1]主要有引线键合(WB)、载带自动焊(TAB)、倒装微互联(FCB)。
引线键合技术[2]是一种使用细金属线,利用热、压力、超声波能量,通过特殊的键合工具(劈刀或楔)将金属线键合到芯片或基板上相应的焊区位置,以此实现电气互连,具有成本低、工艺成熟、可靠性高等优点。
其中,金丝球焊通常会在其第二点鱼尾处再键合一个金球,即安全球,来提高了键合的可靠性。
若安全球发生偏移,则会降低第二点的可靠性,甚至会导致第二键合点脱落。
键合金丝[3]是一种具备优异电气、导热、机械性能以及化学稳定性极好的内引线材料,通常在半导体器件中作为内引线用于各种电子元器件的封装处理。
2 引线键合原理引线键合是金属与金属间的键合,即外力的作用下,金属产生局部塑性变形而紧密结合成为一体。
最常用的引线键合工艺是热压超声波键合[4],在超声波能量的作用下,劈刀带着金属丝产生机械振动,破坏了焊区表面氧化膜,使其露出洁净的界面,同时又加热加压,使两种金属在界面处产生塑性变形而紧密接触,生成具有一定强度的金属间化合物,故而形成焊点,使得金属引线与焊区互连,保证电路能可靠的工作,键合强度来源于金属间化合物的化学键力和分子间作用力。
金丝球焊[4]是引线键合的一种,金丝经过导线管和丝夹,进入劈刀(空心瓷嘴)中,并从劈刀尖伸出来适当的长度(即尾丝),打火杆产生电火花,将尾丝熔化成球,球的大小和形状由烧球参数(功率和时间)决定,球的直径一般是金丝直径的2~5倍,球的厚度应大于球径的1/6且小于球径的1/3,且不得大于2倍线径。
焊机群控系统
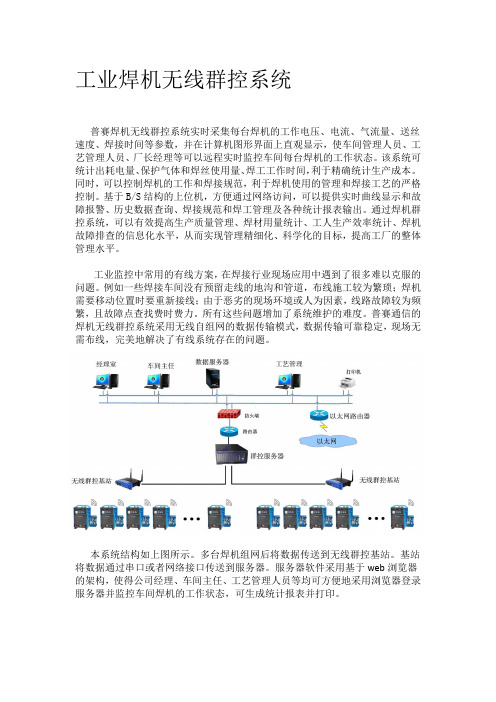
工业焊机无线群控系统普赛焊机无线群控系统实时采集每台焊机的工作电压、电流、气流量、送丝速度、焊接时间等参数,并在计算机图形界面上直观显示,使车间管理人员、工艺管理人员、厂长经理等可以远程实时监控车间每台焊机的工作状态。
该系统可统计出耗电量、保护气体和焊丝使用量、焊工工作时间,利于精确统计生产成本。
同时,可以控制焊机的工作和焊接规范,利于焊机使用的管理和焊接工艺的严格控制。
基于B/S结构的上位机,方便通过网络访问,可以提供实时曲线显示和故障报警、历史数据查询、焊接规范和焊工管理及各种统计报表输出。
通过焊机群控系统,可以有效提高生产质量管理、焊材用量统计、工人生产效率统计、焊机故障排查的信息化水平,从而实现管理精细化、科学化的目标,提高工厂的整体管理水平。
工业监控中常用的有线方案,在焊接行业现场应用中遇到了很多难以克服的问题。
例如一些焊接车间没有预留走线的地沟和管道,布线施工较为繁琐;焊机需要移动位置时要重新接线;由于恶劣的现场环境或人为因素,线路故障较为频繁,且故障点查找费时费力。
所有这些问题增加了系统维护的难度。
普赛通信的焊机无线群控系统采用无线自组网的数据传输模式,数据传输可靠稳定,现场无需布线,完美地解决了有线系统存在的问题。
本系统结构如上图所示。
多台焊机组网后将数据传送到无线群控基站。
基站将数据通过串口或者网络接口传送到服务器。
服务器软件采用基于web浏览器的架构,使得公司经理、车间主任、工艺管理人员等均可方便地采用浏览器登录服务器并监控车间焊机的工作状态,可生成统计报表并打印。
技术特点自组网技术:每台无线焊机可自主发现到基站的传输路径,并可中转其他焊机数据,无需人为干预,安装简便,部署迅捷。
多信道传输技术:采用多个信道并行传输,即便其中几个信道被干扰,依然可以在其他信道保持通信畅通,提高抗干扰性。
为工业应用定制的高可靠技术:采用冗余路径、端到端确认等技术,保证在工厂环境中99.9%的数据传输可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试用的TDS2014B是高精度数字示波器。测试在常温下进行。结果显示波形稳定,达到设计要求。 该打火系统经检测,满足设计要求。其数字开关电源有可控性好、系统成本低、抗干扰能力强等特点,可以应用在其他领域。由于篇幅限制系统中的其它环节,如抗干扰等部分未做说明。另外未来发展趋势是使用软开关技术来替代硬开关技术,减小开关功率器件的开关功耗。还有对控制精度、速度的研究也需要深入。
面向金丝球焊线机的打火烧球控制系统设计
摘 要:本文针对半导体封装设备金丝球焊线机的打火烧球系统进行了设计,采用C8051F000单片机为主控制芯片,以PID和PWM为控制技术,设计了高性能的数字开关电源,进而对打火升压器件——高压包(FBT)进行有效控制。此系统具有:打火电压稳定、系统可控性好、成球质量高以及系统成本低等特点。 关键词:C8051F000;PID;PWM;开关稳压电源;FBT
2 打火系统软件设计2.1数字PID部分[6] 在自动控制技术中,应用最为广泛的调节器控制规律为比例(P)、积分(I)、微分(D)控制,简称PID控制。随着计算机技术的发展,常规PID控制发展为数字PID控制。本系统使用了增量式数字PI控制,控制原理框图。
由图3所示,当系统输出产生偏差后,微控制器根据偏差eu[0]值的大小选择比例参数和积分参数。当偏差信号eu[0]在偏差范围e内时,比例参数Kp选择Kp1,积分参数选择Ki1,以防止过大动作产生超调量;当偏差较大则选择Kp1和Ki2,引入比例环节快速调整作用。计算比例环节P值需要将本次偏差eu[0]与上次偏差eu[1]相比较,得出偏差量增量。在选择比例系数Kp和积分系数Ki时,遵循两个原则:第一,选择比例增益系数Kp以保证系统稳定和良好的瞬态响应,比例增益系数Kp越大,瞬态响应作用越大;第二,选择积分系数Ki,以满足消除静态误差。对于本系统,其控制对象为典型一阶惯性环节,PID参数可以在现场经验整定。2.2 PWM控制技术[7] 脉冲宽度调制PWM(Pulse Width Modulation),简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量、通信、功率控制与变换等许多领域。PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。 PWM技术对开关器件的导通和关断进行控制, 通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。本文的PWM由C8051F000单片机自带的可编程计数阵列PCA产生,频率45 kHz。以下是部分程序。 系统时钟初始化: void SYSCLK_Init (void) { int i; //延时计数器 OSCXCN=0x67; //开启外部振荡器18.432MHz晶体 for(i=0;i while(!(OSCXCN&0x80)) ; //等待晶体振荡器稳定 OSCICN=0x88; //选择外部振荡器为系统时钟源并允许丢失时钟检器 } IO口初始化 void PORT_Init (void) { XBR0 =0x07; //使能SMBus,SPI0,和UART0 XBR1 =0x04; //P1.0 XBR2 =0x40; //使能数据交叉开关和弱上拉 EMI0CF =0x27; EMI0TC =0x21; P74OUT =0xFF; P0MDOUT =0x15; P1MDOUT |=0x3C; //P1.2-P1.5推挽输出 P1 &= 0xc3; //P1.2-P1.5=0 } 定时器0初始化,定时时间为11us void Timer0_Init (void) { CKCON|=0x8; TMOD|=0x1; //16位 Count1ms=10; TR0 = 0; //停止定时器0 TH0 = (-SYSCLK/100000) >> 8; //设初值,11ms时溢出 TL0 = -SYSCLK/100000; TR0 = 1; //开启定时器0 IE|= 0x2; }3 系统测试 对系统进行测试,应用示波器测试由C8051产生的PWM波形和上升时间。图4是单片机输出PWM波形;图5为PWM波形上升时间。
近年来半导体封装工业己经开始在中国蓬勃兴起和发展,对中国工业技术的提高有很大的推动作用。焊线机一般用于封装前将芯片内部电路用金线与封装管脚连接。根据本焊线机的工作特点,打火工序在焊接完成以后对尾丝的处理中发挥作用。打火过程中高压包输出的高压火花把尾丝烧制成球状。这一加工过程的意义在于:第一,有利于固定金丝,使它不会在机构的调整中从劈刀中掉落;第二,金球增大了金丝与焊接件的接触面积,有利于焊接质量的提高,为下一次焊接做好准备。可以说打火烧球对整个焊接过程具有重要的意义。1 打火系统硬件设计 该焊线机的打火系统是以烧熔金丝成球为目的,类似于电子焊。输出电压在10 000 V到20 000 V之间,功率小于2 W,对产品成本、输出精度和可控度有较高要求。 针对设计要求,设计的系统是以C8051F单片机和CPLD来做数字化PID[1]调节,通过数字化PID算法产生PWM波来控制开关管,进而控制主电路;变压器选择回扫变压器[2],采用逆程升压技术[3]。该系统具有成本低、设计简单、效率高等特点。其硬件方框图。
1.1系统主电路 交流市电首经电源滤波器滤波,变压器降压,再经整流电路变换为60 V直流电,加到FBT初级端。然后经控制电路的处理变换为高频方波或准方波电压,升压后,再经高频整流、滤波电路,最后直流高压输出打火。 系统采用的升压器件是一直广泛应用于电视机和显示器中的回扫变压器,也叫FBT 或高压包。它利用行扫描逆程时的高压脉冲进行升压,是一个体积小、升压高的器件。该系统的FBT是特制的,只有基本的5个端子:1个电源端,2个控制输入端,2个输出端。 该系统是用驱动电路将PWM后的脉冲加到接成推挽式的高压开关管上[4],电路图。高压包利用行逆程升压技术产生设计所需的高压。行逆程升压技术是利用外加的电路强行加快高压产生电路开关管截止时反峰电压的上升速度,使开关管在截止时,磁通变化率更大,即可达到在同等条件下产生更高的电压。开关管选择专用于电视行输出电路中的高压快速开2控制电路 输出电压经分压电阻分压,通过CPLD控制将此电压A/D转换后,送到单片机的PID、显示和控制报警部分。通过数字化PID算法产生PWM波来控制开关管,调整输出电压,以获得稳定的输出电压;显示部分采用LCD显示当前电压;如果输出电压低于设定电压则产生蜂鸣报警。通过串口与上位机通讯,实现在线控制。1.2.1 控制芯片C8051F000[5] C8051F000是完全集成的混合信号系统级MCU芯片,具有32 KB Flash存储器并与8051兼容的微控制器内核。还有硬件实现的(不是在用户软件中用位操作模拟)I2C/SMBus、UART、SPI串行接口及一个具有5个捕捉/比较模块的可编程计数器/定时器阵列(PCA)。还有4个通用的16位定时器和4字节宽的通用数字I/O端口。C8051F000有256 B的RAM,执行速度可达20 MIPS。正是基于C8051F000的优越性能和较高的性价比,采用它来完成PWM生成、PID运算及与上位机通讯。1.2.2 输出电压检测电路 由于整个系统是闭环控制系统,对采样速率要求很高。采用CPLD来控制ADC,这样就避免了高速采样占用系统资源的问题,减轻了单片机的负担。本文设计选择ADC芯片AD7678。 AD7678是18位、100 kS/s、电荷分配的完全差分逐次逼近型模数转换器。它由单一的5 V电源供电,内含一个高速18位采样ADC,一个内部转换时钟,一个内部参考缓存,纠错电路以及串行和并行系统接口,是一款速度快、功耗低、精度高的逐次逼近结构的模数转换器。 对ADC的控制,本系统采用Altera公司的FPM7128S。它是高性能E2PROM结构的CPLD。最高可达175.4 MHz的计算频率,支持5 V的ISP功能。I/O数64;宏单元128。主要应用市场包括消费类、工业类、汽车业、计算机和通信类。