第6章-陀螺仪漂移及测试
陀螺操作手册

压在不接电缆时为 45V 左右。它随外接电缆长度(电缆电阻)的增加而升高,最高不会 超过 110V。陀螺不工作时为 110V 左右。当开关②置于电流位置时,显示探管供电电流, 这个电流在测量时为 150mA 左右,陀螺不工作时为 0mA。 ⑧ 高边/磁性按钮,该按钮用于切换高边和磁性工作方式,用于陀螺测量时,为高边和北 向高边工作方式。 ⑨ 锁定控制开关 当开关⑨设置于锁定位置(按下)时,按下启动按钮③可以启动陀螺, 进行测量。当开关⑨设置于关闭位置时,主机停止给探管供电,无法进行测量工作。关 闭陀螺后再启动,时间间隔必须大于 30 秒钟。 ⑩ 外接司钻显示器插座。
并注意上扣过程中,装有陀螺仪的抗压外壳不可有跳动,碰撞; 使用电缆绞车起、下仪器时,每次电缆从静止到运动、或相反,必须缓慢加速或缓慢
减速,加速度应小于 5cm/s²; 定向开窗侧钻过程中,仪器坐键的下放速度不可以过快,应控制在 15 米/分钟以内; 陀螺仪在工作状态下必须静止姿态,禁止晃动陀螺测斜仪探管; 控制测量温度,不要超过规定范围,否则会降低陀螺仪寿命,甚至导致测量失败; 每次开机启动陀螺测斜仪之前,必须保证仪器处于静止状态。陀螺测斜仪运行中的任
3
MDRO-021(Ф38)型陀螺测斜仪操作手册
第三章 仪器各部件说明
一、地面仪器主机(见附图 3-1)
图 3-1 主机控制箱 ① 电源总开关 ② 探管电流/电压指示切换开关 ③ 启动陀螺按钮,在开关⑨置于锁定状态下,用于启动陀螺,并开始测量。 ④ 测量控制开关,用于有线随钻/陀螺(115/230)测斜模式切换。 ⑤ 停止陀螺按钮,在开关⑨置于锁定状态时,按下停止按钮⑤可以让陀螺停止工作。 ⑥ 测量指示灯,在测量控制开关⑨置于锁定位置时,按下启动按钮③,该指示灯闪烁 30
陀螺仪理论及应用
第二节 自由陀螺的视运动及其应用
一、 自由陀螺的视运动
将自由陀螺放在地球的北极,并使转子轴水平, 将自由陀螺放在地球的北极,并使转子轴水平,这时转子轴与 地球极轴互相垂直。 地球极轴互相垂直。站在地球北极上的观察者就会看到陀螺的 自转轴自东向西转动(从上方看H轴顺时针方向旋转),并且 自转轴自东向西转动(从上方看H轴顺时针方向旋转),并且 ), 转动周期与地球自转周期相同,即每24小时旋转一周。 24小时旋转一周 转动周期与地球自转周期相同,即每24小时旋转一周。
陀螺相对动参考系的运动
哈尔滨工程大学自动化学院
刘繁明
前面,我们都是假定陀螺直接安装在惯性基座上,建 前面,我们都是假定陀螺直接安装在惯性基座上, 立了以绕内、外环的转角为广义坐标的运动微分方程, 立了以绕内、外环的转角为广义坐标的运动微分方程,讨 论陀螺在外力矩作用下相对惯性空间的运动规律,但是, 论陀螺在外力矩作用下相对惯性空间的运动规律,但是, 如果计及地球的自转, 如果计及地球的自转,并且考虑实际的陀螺仪总是安装在 运动物体如飞机、舰船上, 运动物体如飞机、舰船上,那么绝对静止的基座是不存在 在这种情况下, 的。在这种情况下,我们就不仅要了解陀螺相对惯性空间 的运动规律, 的运动规律,更重要的是要了解陀螺相对运动基座的运动 规律,进而掌握飞行器、舰船运动的各种参数。 规律,进而掌握飞行器、舰船运动的各种参数。 根据一般运动学原理, 根据一般运动学原理,我们把陀螺相对惯性空间的运 动看成两种运动, 动看成两种运动,即运动基座相对惯性空间的牵连运动和 陀螺相对运动基座的相对运动的合成, 陀螺相对运动基座的相对运动的合成,所以在讨论实际陀 螺的运动时,不仅要考虑陀螺本身的运动情况, 螺的运动时,不仅要考虑陀螺本身的运动情况,还必须要 考虑基座的运动。例如, 考虑基座的运动。例如,当利用安装在载体内的陀螺仪来 测量载体的航向和姿态时, 测量载体的航向和姿态时,就必须考虑载体相对地球的运 以及地球相对惯性空间的运动。 动,以及地球相对惯性空间的运动。
陀螺仪漂移及测试

KM I Bx /H
ωe cos cosK
2019/12/14
19
§6.4 陀螺测试的力矩反馈法
二 力矩反馈法法中陀螺相对地理坐标系的取向
陀螺相对地理坐标系的位置需借助转台
3.陀螺自转轴沿当地铅垂线方向
z x
ey ecoscosK
ly y
ωd
Mb
mgly H
KM IBx /H
陀螺漂移产生的原因是作用在陀螺上的干扰 力矩根据干扰力矩的性质及其变化规律,干扰力 矩可以分为两类:
• 确定性干扰力矩 有规律、可试验或计算确定,易于 补偿。
• 随机性干扰力矩 无规律性。引起陀螺的随机漂移, 只能用统计方法来估计其概率统计 特性。
2019/12/14
5
§6.2 影响陀螺漂移的主要因素
d ey p
精确定位定向,即陀螺输入轴与转台轴平行,并且要使 转台在地理坐标系中精确定向。 精确地测出转台的转速。
2019/12/14
12
§6.3 陀螺测试的伺服跟踪法
二 伺服跟踪法的测速方法
首先在一段时间间隔内,观测转台相对地球的转角,然后根 据地球自转角速度沿转台方向的分量通过计算求得在这段时 间内地球相对惯性空间的转角
ie ey T
得到在同一时间间隔内转台相对惯性空间的转角
ip ie p
用时间间隔相除,即得到陀螺的漂移角速度
d ip / T ey p
2019/12/14
13
§6.3 陀螺测试的伺服跟踪法
三 伺服跟踪法的转台轴的取向
1. 输入轴在水平面内沿东西方向
1. 摩擦力矩及其引起的漂移 2. 不平衡力矩及其引起的漂移 3. 非等弹性力矩及其引起的漂移
第6章-陀螺仪漂移及测试
陀螺仪的测试与标定
2018/2/25
1
§6.1 陀螺漂移的基本概念
一 自由陀螺的漂移 由于各种原因,在陀螺上往往作用有人们所不 希望的各种干扰力矩,在这些可能是很小的干扰力 矩的作用下,陀螺将产生进动,从而使角动量向量 慢慢偏离原来的方向,我们把这种现象称为陀螺的 漂移。把在干扰力矩作用下陀螺产生的进动角速度 称为陀螺的 陀螺漂移的数学模型
陀螺漂移的物理模型
ωd D0 D y a y Dz a z D yy a Dzz a
2 y 2 z
ax a ay az
Dxy a x a y D yz a y a z Dxz a x a z
一 伺服跟踪法的基本原理
双自由度陀螺的单轴转台测漂
2018/2/25 13
§6.3 陀螺测试的伺服跟踪法
二 伺服跟踪法的测速方法
d ey p
精确定位定向,即陀螺输入轴与转台轴平行,并且要使 转台在地理坐标系中精确定向。 精确地测出转台的转速。
2018/2/25
14
§6.3 陀螺测试的伺服跟踪法
2018/2/25
26
§6.5 陀螺漂移的数学模型
普遍采用的陀螺误差模型
ax a a y az
2 d D0 Dx a x D y a y Dz a z D yy a y Dzz a z2
Dxy a x a y D yz a y a z D xz a x a z (ip ) y
二 伺服跟踪法的测速方法
首先在一段时间间隔内,观测转台相对地球的转角,然后根 据地球自转角速度沿转台方向的分量通过计算求得在这段时 间内地球相对惯性空间的转角
激光陀螺的漂移
V (r )2 rdr 0
0
a
代入
1 0 V (1 b )V jP 2 a 2 a (1 e ) b a 2 2 a a (1 e )
0 jL
因为ห้องสมุดไป่ตู้
a
1 ,b ,于是,上式可写成 15 a
8S v v v r L
L R
(四)器件介绍
(五)四频差动陀螺的误差事项
对于左、右旋陀螺,考虑到比例因子与零漂项后,有
L L 2 v 2 (v2 v1 ) R R 2 v 2 (v3 v4 )
r L L L 0 L (1 A ) 2 KVA ( ) ( 2 1 ) R (1 AR )0 2 KVAR ( r )R ( ) 3 4
0 0 0 2 v H H
其中
r 2(1 A) ( A A )H 4KV A 2( )( 2 1 )
0 L R
L R A ( A A ) 2 H 2 H
由于行波2和3同是逆时针行波,所以两者相等,即有
( 2 1 ) ( 3 4 )
朗缪尔流零漂及差损零漂项倍增了!
增益介质将受纵向磁场塞曼效应的影响,使得增正、负旋光增益曲线 向相反方向移动 vB 2
1 B B 1 1 ku 2ku 2 B B 2 2 ku 2ku B 3 3 2ku 4 4 B 2ku
2 1.30 z0l02 l (1 2 )(0.15 2 ) 0.26 2 (1 2 ) a a 0 0 j g0 jVPj , ( j 1, 2)
陀螺仪简介及MENS陀螺仪的误差分析
陀螺仪简介及MENS陀螺仪的误差分析什么是陀螺仪早在17世纪,在牛顿生活的年代,对于高速旋转刚体的力学问题已经有了比较深入的研究,奠定了机械框架式陀螺仪的理论基础。
1852年,法国物理学家傅科为了验证地球的自转,制造了最早的傅科陀螺仪,并正式提出了“陀螺”这个术语。
但是,由于当时制造工艺水平低,陀螺仪的误差很大,无法观察、验证地球的自转。
到了19世纪末20世纪初,电动机和滚珠轴承的发明,为制造高性能的陀螺仪提供了有力的物质条件。
同时,航海事业的发展推动陀螺仪进入了实用阶段。
在航海事业蓬勃发展的20世纪初期,德国探险家安休茨想乘潜艇到北极去探险,他于1904年制造出世界上第一个航海陀螺罗经,开辟了陀螺仪表在运动物体上指示方位的道路。
与此同时,德国科学家舒勒创造了“舒勒调谐理论”,这成为陀螺罗经和导航仪器的理论基础。
中国是世界文明发达最早的国家之一,在陀螺技术方面,我国也有很多发明创造。
比如在传统杂技艺术中表演的快速旋转的转碟节目,就是利用了高速旋转的刚体具有稳定性的特性。
在将高速旋转的刚体支承起来的万向架的应用方面,西汉末年,就有人创造了与现在万向支架原理完全相同的“卧褥香炉”。
这种香炉能“环转四周而炉体常平,可置被褥中”。
实际上是把这种香炉放在一个镂空的球内,用两个圆环架起来,利用互相垂直的转轴和香炉本身的质量,在球体做任意滚动时,香炉始终保持平稳,而不会倾洒。
随着航空事业的发展,到了20世纪30年代,航空气动陀螺地平仪、方向仪和转弯仪等已经被制造出来了。
在第二次世界大战末期,陀螺仪作为敏感元件被用于导弹的制导系统中。
特别是20世纪60年代以来,随着科学技术的发展,为了满足现代航空、航海特别是宇宙航行的新要求,相继出现了各种新型陀螺仪。
目前,陀螺仪正朝着超高精度、长寿命、小体积和低成本等方向发展。
那么,究竟什么是陀螺仪呢?传统的陀螺仪定义是:对称平衡的高速旋转刚体(指外力作用下没有形变的物体),用专门的悬挂装置支承起来,使旋转的刚体能绕着与自转轴不相重合(或不相平行)的另一条(或两条)轴转动的专门装置。
动力调谐挠性陀螺仪_光纤陀螺仪的测试及分析_侯煜
平衡的滤波效应引起的漂移系数 ; D(x)xx、D(y)yz为陀螺仪 x、y轴上由转子支承
系统 沿 xz、 yz方 向 不 等 弹 性 引 起 的 漂 移 系 数 ; D(x)yz、D(y)xx为陀螺仪 x、y轴上与 g平方有关的 其它漂移系数 ;gx、gy、gz为重力加速度沿陀螺仪 x、 y、z轴上的分量 ;ωx、ωy为陀螺仪壳体分别绕 x、y轴 相对于惯性空间的角 速度 ;Ex、Ey为陀螺仪 x、y轴 上的随机漂移率 。
B(y)2yω2y +B(y)3yωy3 +B(y)yxdωyωx +B(y)2yzωy2 ωz +B(y)2yxdωy2 ωx +ωdy
(3)
式中 , ωDx、ωDy为沿 x、y轴动态误差总的漂移速率 ;B (x)F、B(y)F为与载体角运动速率无关的漂移项 , 它 与剩余刚度 、陀螺仪零位偏角 、陀螺仪时间常数等有 关 ;B(x)x、B(y)y为与载体角速率一次方有关的项 , 它与陀螺仪的跟踪角速率精度及失 调转速有关 ;B (x)y、 B(x)z、B(y)x、B(y)z为 与 载 体 角速 率 一 次方 有关的项 , 它与陀螺仪惯性主轴与壳体间偏离角有 关 ;B(x)xy、B(x)xz、B(y)yx、B(y)yz为与载体角速率 交叉乘积有关的项 , 它与陀螺仪惯性主轴与壳体间 偏离角及力矩器非线性误差有关 ;B(x)2x、B(y)2y、B (x)3x、 B(y)3y、B(x)2xz、B(y)2yz分 别为 与载 体角 速率 平方 、三次方及交叉乘积有关的项 , 它与陀螺仪跟踪 精度 、失调转速等有关 ;B(x)xyd、B(y)yxd、B(x)2xyd、B (y)2yxd分别为与载体角速率 、角加速率交叉乘积有 关的项 , 它与陀螺仪跟踪角加速率精度有关 。 动态 误差模型系数的测定可在双轴或三轴速率模拟台上 进行 。 1.2.2 力矩反馈法漂移测试 力矩反馈法漂移测 试的原理 (见图 2)。 由于地球自转及外干扰力矩 的影响 , 陀螺仪的信号器将产生相应的输出信号 , 该信号经滤波 、 放大 、 解调 、 校正后 , 直流电流信 号输入到陀螺仪相应的力矩器中 , 力矩器便产生与 输入的直流信号相对应的控制力矩 , 与作用于陀螺 仪上的由地球自转产生的陀螺力矩和外干扰力矩平 衡 。测量力矩器的输入电流 , 并根据力矩器的标度 因数 , 扣除地球自转的影响 , 就可求得外加等效力 矩的数值 。
陀螺定向方法和精度评定解析
陀螺逆转点法定向及精度评定摘要隧道或井巷工程测量导线布设的形式因受巷道形状的制约,若单纯采用改变导线布设形式或提高测角次数与精度等方法,往往难以满足工程施工对于测量的精度要求。
陀螺经纬仪是测量井下导线边方位角、提高测量精度的重要仪器。
尤其是在贯通测量中陀螺经纬仪的应用非常广泛。
贯通测量是一项十分重要的测量工作,必须严格按照设计要求进行。
巷道贯通后,其接合处的偏差不能超过一定限度,否则就会给采矿工程带来不利影响,甚至造成很大的损失。
本文对陀螺经纬仪工作原理介绍,以及陀螺经纬仪在贯通测量中的精度评定。
陀螺经纬仪在不同领域的贯通测量工作中运用实例的分析,总结出在贯通测量导线加测陀螺定向边的最佳位置。
关键词:陀螺定向,贯通测量,陀螺经纬仪,精度评定ABSTRACTTunnel or shaft engineering measurement wires for the form of roadway, if simple shape by changing arrangement forms or improve wires and precision Angle measurement methods, and often difficult to satisfy the measurement accuracy for engineering construction. Gyro theodolite is measured in wire edge Angle, improve the measuring precision instruments. Especially in the measurement of the photoelectric theodolite gyro breakthrough is used extensively. Through measurement is a very important measurement work, must strictly according to the design requirements. The roadway expedite, its joint deviation cannot exceed a certain limit, otherwise they will be detrimental to the mining project, and even cause great losses. This paper introduces working principle of gyro theodolite, as well as the breakthrough in the measurement of the gyro theodolite accuracy assess. Gyro theodolite in different fieldsof the measurement of the examples, this paper leads in breakthrough measurement on the edge of the directional gyro adds the best position.Key words: directional gyro; through measurement; gyro theodolite; Accuracy Assessment目录1 绪论 (1)1.1陀螺定向的研究现状 (1)1.2研究陀螺定向的目的 (1)1.3陀螺定向的应用领域及发展趋势 (2)2 陀螺经纬仪定向测量原理与方法 (3)2.1陀螺经纬仪的类型与结构 (3)2.1.1 陀螺经纬仪定向的优点及应用领域 (3)2.1.2 陀螺经纬仪的基本结构 (3)2.1.3 陀螺经纬仪的类型 (4)2.2陀螺经纬仪定向的基本步骤 (5)2.3跟踪逆转点法测定陀螺方位角的作业过程 (7)2.3.1 陀螺仪悬带零位观测 (7)2.3.2 粗略定向 (8)2.3.3 精密定向 (9)3 陀螺定向的误差分析 (13)3.1陀螺定向的误差来源 (13)3.2陀螺定向在贯通测量中的精度评定 (14)3.2.1 陀螺方位角一次测定中误差 (14)3..2.2 一次定向中误差 (14)3.3陀螺定向在贯通测量中导线的平差 (15)3.3.1 具有两条陀螺定向边导线的平差 (15)3.3.2 具有三条陀螺定向边导线的平差 (17)4 陀螺定向在贯通测量中的应用实例分析 (20)4.1陀螺定向在道路贯通测量中的应用实例分析 (20)4.1.1 工程概况 (20)4.1.2 陀螺定向技术 (20)4.1.3 精度评定 (22)4.1.4 工程分析 (23)4.2陀螺定向在矿山贯通测量中的应用实例分析 (24)4.2.1 工程概况 (24)4.2.2 陀螺定向技术 (24)4.2.3 精度评定 (26)4.2.4 工程分析 (27)4.3陀螺定向在水利贯通测量中的应用实例分析 (27)4.3.1项目概况 (27)4.3.2 陀螺定向技术 (28)4.3.3 陀螺定向精度评定 (29)4.3.4 坐标解算及成果对比分析 (30)4.3.5 工程分析 (35)5 结论 (38)参考文献 (39)致谢...................................................... 错误!未定义书签。
第6章-陀螺仪漂移及测试分析
2020/10/18
17
§6.4 陀螺测试的力矩反馈法
一 力矩反馈法法的原理
单自由度陀螺的力矩反馈法测漂
2020/10/18
18
§6.4 陀螺测试的力矩反馈法
一 力矩反馈法法的原理
d ey p
精确定位定向。即陀螺输入轴与转台轴平行,并且要使 转台在地理坐标系中精确定向。 精确测速。精确地测出转台的转速。
2020/10/18
13
§6.3 陀螺测试的伺服跟踪法
二 伺服跟踪法的测速方法
首先在一段时间间隔内,观测转台相对地球的转角,然后根 据地球自转角速度沿转台轴向的分量,通过计算求得在这段 时间内地球相对惯性空间的转角:
20
§6.4 陀螺测试的力矩反馈法
二 力矩反馈法法中陀螺相对地理坐标系的取向
陀螺相对地理坐标系的位置需借助转台
2.陀螺输出轴沿当地铅垂线方向
x N
yK ly
lz
ey e coscosK
z
d
Mb H
KM I Bx /H
ωe cos cosK
2020/10/18
21
§6.4 陀螺测试的力矩反馈法
ie ey T
同一时间间隔内转台相对惯性空间的转角:
ip ie p
陀螺的漂移角速度:
d ip / T ey p
2020/10/18
14
§6.3 陀螺测试的伺服跟踪法
三 伺服跟踪法的转台轴的取向
1. 输入轴在水平面内沿东西方向
d p
2. 输入轴与地球自转轴平行
MEMS陀螺仪随机漂移仿真和试验
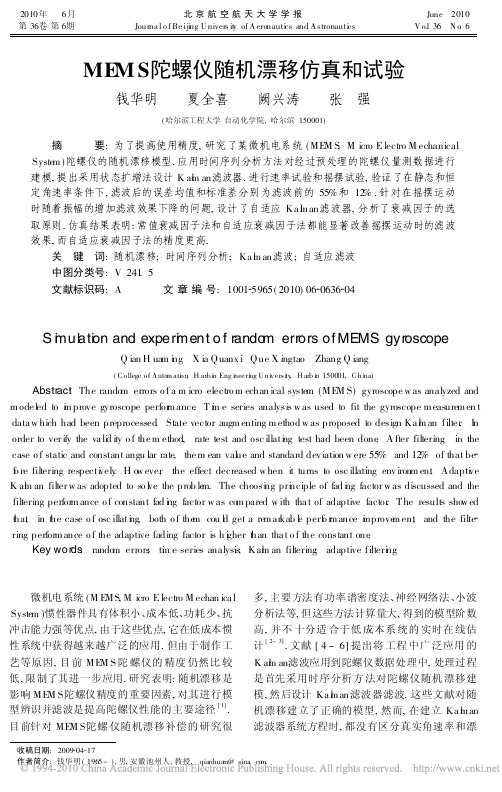
2010年6月第36卷第6期北京航空航天大学学报Journa l o f Be iji ng U nivers it y of A eronauti cs and A stronauti cs June 2010V o.l 36 N o 6收稿日期:2009 04 17作者简介:钱华明(1965-),男,安徽池州人,教授,qianhua m@sina .co m.ME M S 陀螺仪随机漂移仿真和试验钱华明 夏全喜 阙兴涛 张 强(哈尔滨工程大学自动化学院,哈尔滨150001)摘 要:为了提高使用精度,研究了某微机电系统(ME M S ,M icro E lectro M echanical Syste m )陀螺仪的随机漂移模型.应用时间序列分析方法对经过预处理的陀螺仪量测数据进行建模,提出采用状态扩增法设计K al m an 滤波器.进行速率试验和摇摆试验,验证了在静态和恒定角速率条件下,滤波后的误差均值和标准差分别为滤波前的55%和12%.针对在摇摆运动时随着振幅的增加滤波效果下降的问题,设计了自适应Ka l m an 滤波器,分析了衰减因子的选取原则.仿真结果表明:常值衰减因子法和自适应衰减因子法都能显著改善摇摆运动时的滤波效果,而自适应衰减因子法的精度更高.关 键 词:随机漂移;时间序列分析;Ka l m an 滤波;自适应滤波中图分类号:V 241.5文献标识码:A 文章编号:1001 5965(2010)06 0636 04S m i ul a ti o n and experm i ent o f rando m errors of MEMS gyroscopeQ ian H ua m i n g X ia Quanx i Que X ingtao Zhang Q iang(C ollege of Auto m ati on ,H arb i n Eng i neeri ng Un i vers i ty ,H arb i n 150001,C h i na)Abstr act :The rando m errors o f a m icro electro m echan ical syste m (ME M S)gyroscope w as analyzed and m ode l e d to i m prove gyroscope perfor m ance .T i m e series analysis w as used to fit the gyroscope m easure m en t data w hich had been preprocessed .State vector augm enting m ethod w as proposed to design Ka l m an filter .I norder to ver ify the va li d ity o f the m ethod,rate test and osc illati n g test had been done .A fter filtering ,in the case o f static and constant angu lar rate ,the m ean val u e and standard dev iation w ere 55%and 12%of that be f o re filtering respecti v ely .H o w ever ,the effect decreased w hen it turns to osc illating env ironm en.t Adapti v e K al m an filter w as adopted to so l v e the prob le m.The choosi n g pri n ciple of fad i n g factor w as discussed and the filtering perfor m ance o f constant fad i n g factor w as co m pared w ith tha t of adaptive factor .The results sho w ed t h a,t in t h e case o f osc illati n g ,both o f the m cou l d get a re m ar kab l e perf o r m ance i m prove m en,t and the filte ring perfor m ance o f the adaptive fading factor is h i g her t h an tha t o f the constant one .Key wor ds :rando m errors ;ti m e series analysis ;Kal m an filtering ;adaptive filteri n g微机电系统(M E MS,M icro E lectro M echan ica l Syste m )惯性器件具有体积小、成本低、功耗少、抗冲击能力强等优点,由于这些优点,它在低成本惯性系统中获得越来越广泛的应用.但由于制作工艺等原因,目前ME M S 陀螺仪的精度仍然比较低,限制了其进一步应用.研究表明:随机漂移是影响ME M S 陀螺仪精度的重要因素,对其进行模型辨识并滤波是提高陀螺仪性能的主要途径[1].目前针对ME M S 陀螺仪随机漂移补偿的研究很多,主要方法有功率谱密度法、神经网络法、小波分析法等,但这些方法计算量大,得到的模型阶数高,并不十分适合于低成本系统的实时在线估计[2-3].文献[4-6]提出将工程中广泛应用的K al m an 滤波应用到陀螺仪数据处理中,处理过程是首先采用时序分析方法对陀螺仪随机漂移建模,然后设计Ka l m an 滤波器滤波.这些文献对随机漂移建立了正确的模型,然而,在建立Ka l m an 滤波器系统方程时,都没有区分真实角速率和漂移,当真实角速率不为零时会出现明显错误.本文采用状态扩增法设计了Ka l m an 滤波器,进行静态和动态试验验证模型和滤波器的正确性,针对载体摇摆时经典Ka l m an 滤波器效果下降的问题,引入自适应Ka l m an 滤波方法.1 陀螺仪随机漂移模型的建立陀螺仪输出信号 g 用公式表达为g = +r +v (1)其中, 为真实角速率;v 为量测噪声;r 为随机漂移,它为建模对象,为了建模必须将其提取出来,即进行预处理.首先从陀螺输出信号中减去试验中输入的角速率值和常值零偏,然后用均值估计法来消除v,均值估计法表达式[4]为r n =1l ni=n-l+1r *i(2)其中,r *i为量测数据去除确定项后的残差;l 为定常数据窗长度;r n 为r 的时间序列.对r n 进行平稳性和正态性检验,然后建立模型.模型的形式可利用序列的相关函数和功率谱密度特性确定[7],也可直接从最简单的模型开始拟合,根据拟合后残差的大小来确定[8].本文采用第2种方法并考虑了A I C (Aka i k e I nfor m ationC riterion)准则、模型适用性和系统实时性要求.A I C 准则的简化形式为A I C (p )=ln 2a+2p /N(3)其中, 2a为残差方差;N 为数据点数;p 为模型阶数.选用AR (Au to Regressi v e)模型对陀螺仪随机漂移建模,用A I C 准则分析,所得A I C 值随AR 模型阶数变化的曲线如图1所示.图1 A IC 函数曲线由图1可见A I C 函数在p =2时有最小值.由于建模之后要进行Ka l m an 滤波,而滤波计算量以滤波器维数的3次方递增,为了满足系统实时性要求,模型的阶次越低越好,所以p 值在1和2之中选择.选择标准为检验模型适用性,通过计算残差 n 的自相关函数和r n 与 n 的互相关函数来完成.经计算,AR (1)模型中这两个值分别为0.052和-0.085,说明残差信号为白噪声,即所构建的模型满足适用性要求.回归到问题的最初出发点,建模的目的是要提取出白噪声来满足K al m an 滤波器的使用要求,可见一阶模型已经完全满足这一点,故选用AR (1)模型,其表达式为r n =!r n-1+ n n ~N ID (0, 2)(4)其中,!为模型参数; n 为白噪声,其方差为 2.2 Kal m an 滤波器的设计建立模型以后,采用Ka l m an 滤波器进行滤波.因为系统噪声为有色噪声,量测噪声为白噪声,采用状态扩增法对滤波器模型进行改进[9].选取 和r 为状态变量,即X =[ r]T.系统状态方程和观测方程为X k =∀k,k-1X k-1+#k w k(5)Z k =H k X k +v k(6)其中,w k 和v k 为白噪声序列;Z k 为陀螺仪量测值;∀k,k -1=110!;#k =01;H k =[1 0].由式(5)和式(6)构造Ka l m an 滤波器:X ^k,k-1=∀k,k-1X ^k-1(7)X ^k =X ^k,k-1+K k [Z k -H k X ^k ,k-1](8)P k,k-1=∀k ,k-1P k-1∀Tk,k-1+#k ,k-1Q k-1#T k,k-1(9)K k =P k,k-1H Tk(H k P k,k-1H T k+R k )-1(10)P k =(I -K k H k )P k ,k-1(11)其中,Q k 为系统噪声方差阵;R k 为观测噪声方差阵;P k,k -1为一步预测误差方差阵;P k 为估计误差方差阵;K k 为滤波增益矩阵.3 模型和滤波器性能的检验为了验证模型的准确性和滤波器的有效性,对ME M S 惯性测量组件ADIS16350进行试验,该组件包含三轴陀螺仪和三轴加速度计,陀螺仪的零偏不稳定性和量测噪声分别为0.015( )/s 和0.60( )/s .此处只研究一个陀螺仪.主要测试设备为3KTD 565三轴多功能惯导实验转台.3.1 静态试验测试前对陀螺仪固定误差进行补偿,测试时将惯导组件固定在转台端面上,保持静止,通电预热10m i n 后以100H z 采样频率采集并保存30m i n 陀螺仪数据进行离线分析.因为陀螺仪的分辨率较低,难以敏感地球自转角速率,采集的数据只包含随机漂移和量测噪637第6期 钱华明等:M E M S 陀螺仪随机漂移仿真和试验声,对其预处理然后建模.采用Yule W alker 方法来计算模型参数,计算得!=0.107.令X ^0=[0 0]T,全体数据均方根值的10倍作为初始误差方差P 0.代入式(7)~式(11)进行K al m an 滤波解算.滤波后,误差均值和标准差分别由滤波前的-0.3131( )/s 和0.6350( )/s ,降低到-0.1965( )/s 和0.0869( )/s .可见,静止时滤波器可以大幅消减陀螺仪随机漂移.3.2 速率试验控制转台外框依次以 为2,5,10和100( )/s 旋转10m i n ,采集并保存数据.与静态数据处理方法一样,首先对随机漂移进行建模,然后使用K al m an 滤波器滤波,计算滤波前后误差均值和标准差,所得结果见表 1.可见,滤波后误差均值和标准差的降低幅度和静态时相近,分别为滤波前的55%和12%左右.可知在恒定角速率下,该滤波方法仍然适用.表1 速率试验误差均值和标准差( )/s误差均值误差标准差滤波前滤波后滤波前滤波后2-0.3300-0.20170.53500.09655-0.3526-0.19630.62630.102310-0.2964-0.17350.41350.0896100-0.3200-0.19000.52370.09353.3 摇摆试验利用摇摆试验模拟载体的机动状态.以周期为10s ,振幅分别为5 ,15 ,50 和150 控制转台外框摇摆.真实角度A 和 计算公式如下:A =A 0sin 2∃Tt +!0(12)=A ~=A 02∃T cos 2∃Tt+!0(13)其中,A 0为振幅;T 为周期;!0为初始相位.因为转台启动和停止时转动不是正弦振荡,难以确定 ,此处采集12m i n 数据,取中间10m i n 进行分析.滤波前后的误差均值和标准差见表2,A 0=50 时的数据经过滤波后的误差曲线见图2(将全部数据显示不易观察,此处只绘制中间1m in 数据).表2 摇摆试验误差均值和标准差A 0/( )误差均值/(( )!s -1) 误差标准差/(( )!s -1)滤波前滤波后滤波前滤波后5-0.3132-0.24850.66660.094715-0.3213-0.35250.73200.112050-0.3567-0.71650.76050.2407图2 摇摆试验滤波后误差(A 0=50 时K al m an 滤波)由表2和图2可见,随着A 0的增大,滤波后误差均值和标准差逐渐增大,且呈现周期振荡.分析可知,式(5)中∀k,k -1(1,1)设定为1,即默认相邻采样点的角速率值相同.当实际角速率为0或保持恒定时,系统模型准确,滤波效果较好.而摇摆时,各时刻的 值不同,这会导致因模型不准确产生误差.然而,因为载体运动方式的不可预知性,∀k,k -1难以动态确定,因此不对其进行调整,而是探求在系统模型不准确时提高滤波性能的方法.提高采样频率可以使相邻采样点的 尽量保持恒定,减小模型误差,但是这对系统硬件和处理器计算速度提出了较高要求,且采样频率的提高会引入高频噪声,使AR 模型发生不应有的升阶[7],因此该方法并不可取.由于产生震荡误差的直接原因是K al m an 滤波器增益值太小,可以采用衰减记忆自适应滤波,通过减少较早时刻量测值的比重来增大增益值,这是符合物理本质的,因为模型不准确时,较早的量测值就不应该起作用了[8],本文即选用衰减记忆自适应Ka l m an 滤波来提高滤波效果.4 自适应K al m an 滤波自适应K al m an 滤波方程[10]描述如下:P k,k-1=∀k ,k-1P k-1∀Tk,k-1+#k,k-1%Q k-1#Tk,k-1(14)K k =P k,k-1H Tk (H k %P k,k-1H Tk +%R k )-1(15)P k =1%[(I -K k H k )P k,k-1](16)X ^k,k-1=∀k,k-1X ^k-1(17)X ^k =X ^k,k-1+K k [Z k -H k X ^k ,k-1](18)衰减因子%可由先验知识来确定,但具有很大的随意性,文献[11]提出了衰减因子的自适应估计方法,然而这些方法要求计算矩阵的特征值和迹,计算量较大,文献[12]以GPS /I N S 组合导航系统为背景,提出的一种方法在保证滤波精度638北京航空航天大学学报 2010年的前提下减小了计算量,本文对其进行改进后应用到陀螺仪随机漂移处理中.记V k =Z k -H k X ^k ,k-1(19) 若t k -1时刻滤波最优,应有[12]V k ~N (0,H k P k,k-1H Tk +R k )(20)构造{V k }的加权平方和如下:Y k =V Tk [H k (∀k,k-1P k-1∀Tk ,k-1+#k,k-1%Q k-1#Tk,k-1)H T k+R k ]-1V k (21)由概率论知识可知Y k 服从m 自由度的中心&2分布,有如下的检验规则:∋=Y k=∀1 滤波非最优<1 滤波最优(22)其中,∋为统计检验的比例因子; 为门限值,可由预定的置信水平a 借助&2分布表来选定.记A k =H k ∀k,k -1P k -1∀T k,k -1H Tk(23)B k =H k #k,k-1Q k-1#Tk ,k-1H Tk +R k(24)D k =A k +%B k(25) 当滤波最优时,有Y k =V Tk D -1k V k ~&2a(26)分别检验Y k 的每一个分量,满足Y i (k )=[V i (k )]2D ii (k )~&2(1)(27)其中,V i (k )为V k 的第i 个元素;D ii (k )为D k 对角线上第i 个元素.可知,若要使算法最优,%应满足%i <[V i (k)]2A ii (k) -B ii (k )A ii (k )i =1,2,#,m(28)取%*=m i n (1,%1,%2,#,%m )(29)当系统摇摆时,初始时刻量测值不为0,而X ^0=[0 0]T,所求新息V k 较大,若将其代入式(29)中求%*,会得到一个极小的值,再代入式(15)中会使K 值极大,致使系统发散.因此设定%的下限值为0.5,即%=m ax (%*,0.5).因为%在滤波器中只是起微调的作用,其值不应太小,设定此下限也是合理的.分别采用常值衰减因子法(%选取0.8和0.6)和自适应衰减因子法(取a =0.01,即 =6.635)对摇摆试验数据进行分析,计算滤波后的误差均值和标准差,结果见表3.图3为A 0=50 时使用自适应衰减因子法滤波后的误差曲线.对比表2和表3,可见,与经典Ka l m an 滤波相比,2种方法都可以减小误差均值和标准差.常值衰减因子法的误差标准差随着%值的减小和A 0的增大而增大,直至和滤波前相近;误差均值在A 0较小时受%变化的影响不大,A 0较大时随着%的减小而减小.而自适应衰减因子法的误差均值和标准差始终比较小.可见,自适应衰减因子法的精度更高,适应性更强.表3 摇摆试验误差均值和标准差(自适应K al m an 滤波)A 0/( )误差均值/(( )!s -1)误差标准差/(( )!s -1)%=0.8%=0.6自适应法%=0.8%=0.6自适应法5-0.2065-0.2033-0.16880.23520.71050.320615-0.2374-0.2075-0.15200.21150.69330.315850-0.4328-0.2057-0.19410.29560.73250.3072150-0.5634-0.2124-0.19190.30250.71010.3474图3 摇摆试验滤波后误差(A 0=50 时使用自适应衰减因子法)5 结 论本文采用时间序列分析方法对ME M S 陀螺仪随机漂移进行分析和建模,基于状态扩增法设计了Ka l m an 滤波器.对ADI S16350ME M S 陀螺仪的试验和仿真结果表明:以误差均值和标准差为衡量指标,在静态和恒定角速率状态下,经典K al m an 滤波器可以有效减少陀螺仪随机漂移,然而在摇摆运动时,滤波效果会随着振幅的增大而降低.针对摇摆运动设计了自适应Kal m an 滤波器,比较了常值衰减因子法和自适应衰减因子法的滤波效果.结果表明:常值衰减因子法和自适应衰减因子法都可以提高滤波效果,二者相比,后者精度更高.参考文献(References )[1]Ch angH ong l ong ,Xue L i ang ,Q i n W e,i et a.l An integrated M E M Sgyroscope array w i th h igher acc u racy ou t pu t[J].S ensors ,2008(8):2886-2899[2]Ch en X i yuan .M odeli ng rando m gyro drift by ti m e seri es neuralnet w orks and by trad i ti on al m ethod [C ]//Neural N et w ork s &S i gnal Processi ng .Nan ji ng :IEEE,2003:810-813(下转第658页)639第6期 钱华明等:M E M S 陀螺仪随机漂移仿真和试验参考文献(References)[1]Lee H Q,Erz b erger H.A l gorit hm for fi xed range opti m al tra j ectori es[R].NASA TP 1565,1980[2]Sorensen J A,W aters M H,Pat m ore L C.Co m puter progra m f orgenerati on and eval uation of near op ti m um verti ca l fli gh t p rofiles [R].NASA CR 3688,1983[3]W u Shu fan,Re i chert G.Energy state app roach t o t he i ntegratedfli gh t perfor mance m anage m ent of co mmercial aircraft[J].T ran s acti ons of Nan ji ng Un i vers i ty of A eron auti cs&A stronau tics.1997,14(2):101-108[4]郭锁凤,申功璋,吴成富.先进飞行控制系统[M].北京:国防工业出版社,2003:131-150Gu o Suof eng,Sh en Gongzhang,W u Ch engf u.Advanced flight con trol syste m[M].Beiji ng:N ati onal D efen ce Press,2003: 131-150(i n C hinese)[5]吴树范,沈勇璋,郭锁凤.飞机纵向飞行轨迹的优化与实现[J].控制理论与应用,1992,9(4):380-386W u Shu f an,Shen Y ongz hang,Gu o Suofeng.Traj ectory opti m i za tion of aircraft verti cal fli ght p rofile[J].C ontrolTheory and Ap p lications,1992,9(4):380-386(i n Ch i nes e)[6]徐启华,肖顺达,陈新海.基于总能量原理的飞行性能管理计算[J].西北工业大学学报,1994,12(1):25-30Xu Q i hua,X iao Shunda,Chen X i nha.i A lgorit hm f or fli ght perf or m ancem an age m en t app licab l e t o P R Ch i na[J].J ournal ofNort hw estern Po l ytechn i calU n i vers it y,1994,12(1):25-30(i n Ch i nese)[7]宋乐,赵淑利.以飞行成本最优为目的的大型飞机的性能优化[J].兵工自动化,2009,28(6):43-45Song Le,Zhao Shul.i Bes t fli gh t cost p erf or m ance opti m izati on f or large aircraft[J].O rdn ance Industry Auto m ation,2009,28(6): 43-45(i n Ch i nese)[8]田小燕,陈怀民,吴成富,等.基于能量控制的长航时飞机轨迹优化设计及仿真[J].弹箭与制导学报,2004,24(5): 530-532T i an X iaoyan,C hen H uai m i n,W u Chengfu,et a.l Traj ectory opti m i zation of l ong endurance flight energy based control[J].J our na lof Projectil es,Rockets,M i ss il es and Gu i dance,2004,24(5): 530-532(i n C h i nese)[9]程鹏,王艳东.现代控制理论基础[M].北京:北京航空航天大学出版社,2004:101-116Cheng Peng,W ang Yandong.Funda m ental ofm odern con trol the ory[M].B eiji ng:B eiji ng U n i vers it y of Aeronauti cs and A stro nauti c Pres s,2004:101-116(i n Ch i nes e)[10]黄太平.飞机性能工程[M].北京:科学出版社,2005:165-166H uang T ai p i ng.A ircraft p erf or m ance proj ect[M].Beiji ng:Science Press,2005:165-166(i n Ch i nese)(编 辑:李 晶)(上接第639页)[3]李晓莹,胡敏,张鹏,等.交叠式A ll an方差在微陀螺随机误差辨识中的应用[J].西北工业大学学报,2007,25(2): 225-229L iX i aoyi ng,Hu M i n,Zhang Peng,et a.l App lication of overl ap ping A ll an variance i n s t ochastic m odeli ng of m icro gyro[J].Journa l ofN ort hw estern Pol ytechn ical Un i versit y,2007,25(2): 225-229(i n Ch i nese)[4]吉训生,王寿荣.M EM S陀螺仪随机漂移误差研究[J].宇航学报,2006,27(4):640-642Ji Xun s heng,W ang Shou rong.The research on rando m drift of M E M S gyroscope[J].Jou rnal of As tronau tics,2006,27(4): 640-642(i n Ch i nes e)[5]吉训生,王寿荣,许宜申.自适应K al m an滤波在M EM S陀螺仪信号处理中的应用[J].传感器与微系统,2006,25(9): 330-334Ji Xun s heng,W ang Shou rong,Xu Y i s h en.The appli cati on of a dapti ve Kal m an filteri ng i n the si gnal process ofM EM S gyro[J].S ensors and M icro Syste m,2006,25(9):330-334(i n Ch i n ese) [6]Zhang H ua,K e X i zheng,J i ao Rong.Experi m ental res earch onfeedback Kal m an m odel of M E M S gyroscope[C]//The E ighth International C on f eren ce E l ectron i c M eas ure m ent and Instru m en ts.X i an:IEEE,2007:253-256[7]杨叔子,吴雅,轩建平,等.时间序列分析的工程应用[M].武汉:华中理工大学出版社,2007:175-184Y ang Shuz,i W u Ya,Xuan J i anp i ng,et a.l T i m e s eri es an al ysis i n engi neeri ng app licati on[M].W uh an:H uaz hong Un i versit y of S ci ence and Technol ogy Press,2007:175-184(i n Ch i n ese) [8]俞济祥.卡尔曼滤波理论及其在惯性导航系统中的应用[M].西安:西北工业大学出版社,1988:78-91Yu Ji x i ang.The theory ofK al m an filterw it h i ts appli cati on i n i n ertial nav i gati on syst e m[M].X i an:Nort hw estern Po l ytechn i cal Un ivers it y Press,1988:90-91(i n C h i nes e)[9]付梦印,邓志红,张继伟.Kal m an滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003:69-72Fu M engyi n,Deng Zh i hong,Zhang J i w e.i Th e t h eory of Kal m an filter w ith its appli cati on i n nav i gati on s yste m[M].Be iji ng:Sci ence Press,2003:69-72(i n C h i nese)[10]Ji Xuns h eng,W ang Shou rong,Xu Y i shen,et a.l Appli cati on oft h e d i gital si gn al procession i n t he M EM S gyroscope de d ri ft[C]//Proceedi ngs of t he1st I EEE I n tern ati on alCon ference onN ano/M icro Engi n eered and M olecu l ar Syste m s.Zhuh a:i[s.n.],2006:218-221[11]夏启军,孙优贤,周春晖.渐消卡尔曼滤波器的最佳自适应算法及其应用[J].自动化学报,1990,16(3):210-216XiaQ ij un,Sun Youx i an,Zhou C hunhu.i An op ti m al adap tive algori thm f or f ad i ng Kal m an filter and its app li cati on[J].ACTA Au to m ati ca S i n i ca,1990,16(3):210-216(i n Ch i nes e) [12]耿延睿,崔中兴,张洪钺,等.衰减因子自适应滤波及在组合导航中的应用[J].北京航空航天大学学报,2004,30(5):434-437G eng Yanru,i Cu i Zhongx i ng,Zhang H ongyue,et a.l Adapti vefad i ng Kal m an filter w it h app licati ons i n i ntegrated navigati ons yste m[J].J ournal of Beiji ngU nivers it y ofAeronauti cs and A stronau tics,2004,30(5):434-437(i n Ch i n ese)(编 辑:赵海容)658北京航空航天大学学报 2010年。
陀螺仪测量操作流程

陀螺仪测量操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!陀螺仪测量操作流程。
测量准备。
1. 选择合适陀螺仪,根据测量目标和环境选择合适的陀螺仪类型和灵敏度。
光纤陀螺仪测试方法

光纤陀螺仪测试方法1 范围本标准规定了作为姿态控制系统、角位移测量系统和角速度测量系统中敏感器使用的单轴干涉性光纤陀螺仪(以下简称光纤陀螺仪)的性能测试方法。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注目期的引用文件,其随后所有的修改单(不包含勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB 321-1980 优先数和优先系数CB 998 低压电器基本实验方法GJB 585A-1998 惯性技术术语GJB 151 军用设备和分系统电磁发射和敏感度要求3 术语、定义和符号GJB 585A-1998确立的以及下列术语、定义和符号适用于本标准。
3.1 术语和定义3.1.1 干涉型光纤陀螺仪 interferometric fiber optic gyroscope仪萨格奈克(Sagnac)效应为基础,由光纤环圈构成的干涉仪型角速度测量装置。
当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干涉强度即反映出角速度的变化。
3.1.2 陀螺输入轴 input axis of gyro垂直于光纤环圈等效平面的轴。
当光纤陀螺仪绕该轴有旋转角速度输入时,产生光纤环圈相对于惯性空间输入角速度的输出信号。
3.1.3 标度因数非线性度 scale factor nonlinearity在输入角速度范围内,光纤陀螺仪输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
3.1.4 零偏稳定性 bias stability当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
3.1.5 零偏重复性 bias repeatability在同样条件下及规定间隔时间内,多次通电过程中,光纤陀螺仪零偏相对其均值的离散程度。
陀螺漂移
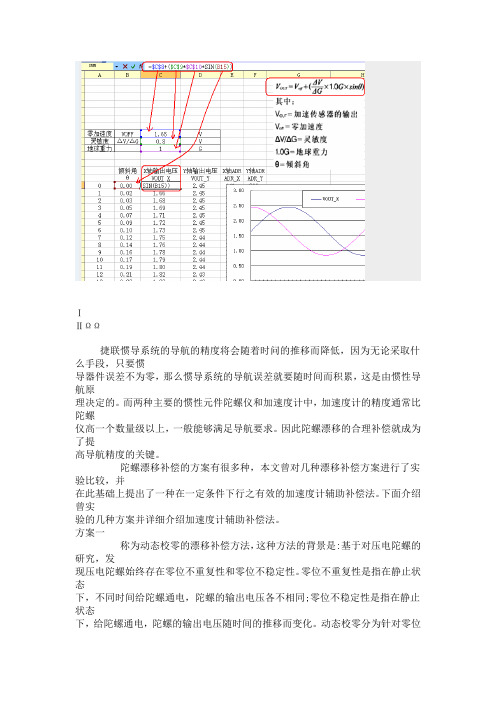
ⅠⅡΩΩ捷联惯导系统的导航的精度将会随着时问的推移而降低,因为无论采取什么手段,只要惯导器件误差不为零,那么惯导系统的导航误差就要随时间而积累,这是由惯性导航原理决定的。
而两种主要的惯性元件陀螺仪和加速度计中,加速度计的精度通常比陀螺仪高一个数量级以上,一般能够满足导航要求。
因此陀螺漂移的合理补偿就成为了提高导航精度的关键。
陀螺漂移补偿的方案有很多种,本文曾对几种漂移补偿方案进行了实验比较,并在此基础上提出了一种在一定条件下行之有效的加速度计辅助补偿法。
下面介绍曾实验的几种方案并详细介绍加速度计辅助补偿法。
方案一称为动态校零的漂移补偿方法,这种方法的背景是:基于对压电陀螺的研究,发现压电陀螺始终存在零位不重复性和零位不稳定性。
零位不重复性是指在静止状态下,不同时间给陀螺通电,陀螺的输出电压各不相同;零位不稳定性是指在静止状态下,给陀螺通电,陀螺的输出电压随时间的推移而变化。
动态校零分为针对零位不重复性的开机零位校正和针对零位不稳定性的零位漂移抑制过程。
零位信号是一个变化较缓慢的信号,在短时间内,可以看作直流分量。
因此,开机零位校正可以采用一个求和过程,对开机时静态陀螺信号进行求和,再将所求之和除以积分的时间得均值,即可将开机零位分离出来。
本文采用的是开机一分钟的均值。
而零位漂移抑制则需要通过对大量陀螺数据的分析,总结出其漂移规律,根据规律预置漂移速率,由漂移抑制算法消除零位的不稳定性。
但是这个方一案存在一些问题,首先零位信号是随时间漂移的,那么开机所求得的零位信号在之后的导航解算中很可能与实际情况不符合从而影响修正的效果;另外,预置漂移速率要求陀螺输出有较强的规律性,而经过大量实验数据的采集和分析,证实本实验采用的陀螺不具有很强的规律性,所以此种动态校零的修正方案在本文并不适用。
方案二本文曾提出过一种方案,称之为最小二乘拟合法。
是根据对采集的大量陀螺数据的分析,建立一个陀螺输出漂移与时间关系的最小二乘的模型,并将陀螺输出分为若干小的时间段,例如I0s(因为在相邻的短时间段内规律性可视为相同),由于时间短,可将每个时间段内的模型近似认为是Y=aX十b, Y为陀螺输出,X为时间变量,a, b为待辨识参数,利用本时间段采集的数据实时估计的陀螺输出漂移的最小二乘模型来预估下一时间段陀螺输出漂移值,将据此估计值下一时间段中对实际陀螺输出进行修正。
陀螺仪原理实验指导书1[1]
![陀螺仪原理实验指导书1[1]](https://img.taocdn.com/s3/m/e3c418679b6648d7c1c74612.png)
陀螺仪原理实验指导书王军惯性导航实验室惯性技术基础实验(一)——陀螺特性一、陀螺仪陀螺仪的基本结构如图1,中间是一个转子,转子的轴叫主轴,又称Z轴。
转子和主轴还可以绕水平轴(又称Y轴)转动;又可以绕垂直轴(又称Z轴)转动。
这样,陀螺仪的主轴可以指向空间任何方向。
这种陀螺仪称为自由陀螺仪。
图1 陀螺仪基本结构为讨论方便,我们规定用“右手法则”来确定主轴旋转的正方向,右手握拳,拇指与四指垂直,四指顺着转子的转动方向,拇指所指的方向就是主轴的正方向。
我们实验室所用的陀螺仪为电动陀螺仪,是航海型电罗经回转球里的一个陀螺马达,所用电源为三相110V 330周。
正常转速为19800转/分。
由于转速比较高,陀螺特性就比较明显。
二、陀螺仪第一特性——定轴性当陀螺仪的转子尚未旋转之前,我们就不能从它的装置中察觉出它与通常的非陀螺体有任何不同的现象。
关于非陀螺体,这里所指的是实验以前不具有动量矩的物体。
当陀螺仪的转子以高速绕其极轴Z旋转时,不管怎样移动或转动它的座底。
如图2主轴在空间所指的方向不变。
主轴指向的稳定与否,决定于转子的转速与重量。
转速高、重量重、指向性就强。
指向性强的陀螺仪,即使受到短时间的强烈冲击加于平衡环上时,对主轴原来的位置却不会产生明显的效果。
tH=d d 若支撑摩擦力矩很小可忽略不计时,又当外力矩为零,即0=M ,则:0d d =tH该式表示动量矩H 在瞬刻时间内没有变化,即表示陀螺转子动量矩H 大小不变,方向也不变。
因此陀螺仪主轴的指向就不变。
三、陀螺仪的第二特性——进动性在外加力矩作用下,陀螺仪运动的特性发生变化,加在陀螺仪外平衡环上的力矩会引起陀螺仪绕内平衡环轴而旋转。
反之,加在内平衡环上的力矩,会引起陀螺仪绕外平衡环轴而旋转。
当外加力矩的方向改变时,则平衡环的转动方向也随之改变。
假设有一外力F 作用在陀螺仪的主轴上,如图3,如果转子是不动的,那么主轴就要沿着F 力的作用方向向下运动。
它使整个转子绕着Y 轴转动。
陀螺仪随机漂移

根据随机过程的定义,陀螺仪随机漂移随机过程 x(t)可以被看成 是由依赖于时间 t 的这一族随机变量所构成的总体,因而可以借助数 理统计方法通过对大量漂移数据的统计分析,来寻求它的统计特性。
①概率分布函数(概率密度函数)---提供随机过程中各种取值 的概率特性,它可以给陀螺随机漂移以完整的描述。
⒃
由 AR(1)模型的性质可知 Rt = b1Rt-1,带入上式可得自回归系数的
表达式:
b1 = e − β∆t
⒄
则,AR(1)模型的表达式:
X t = e−β∆t X t−1 + ωt
⒅
把 e−β∆t 展开级数,并忽略二阶及二阶以上的小量,则得:
X t = (1− β∆t )X t−1 + ωt ⇒
N=km,把漂移数据序列分成 k 个等时间区间的子样(子序列),每个
子样的数据个数相同,均为 m。顺序分别计算每个子样的均值μi 和
方差
α
2 i
(i=1,2,…,k),计算各子样的均方值:
ϕi2
=
ui2
+
α
2 i
(i=1,2,…,k )
⑶
则该子样均方值序列的中值为:
4
∑ = ϕ
2 0
1k k i−1
以上是描述陀螺仪随机漂移过程中的几个重要统计特征函数,均 值反映了随机过程在各个时刻取值的分布中心;方差反映了随机过程 在各个时刻取值相对均值的离散程度;自相关函数反映了随机过程在 两个不同时刻取值之间的相关程度;自功率频谱密度函数反映了随机 过程的平均功率按频率分布的密度。
上述描述平稳随机过程统计特性的数学估计式只对平稳正态随 机过程才适用;如果含有趋势项随机漂移数据序列,必须经过平稳化 处理才可应用上述数学估计式进行计算。 2 陀螺仪随机漂移率的测取
陀螺仪角速度的检测与处理
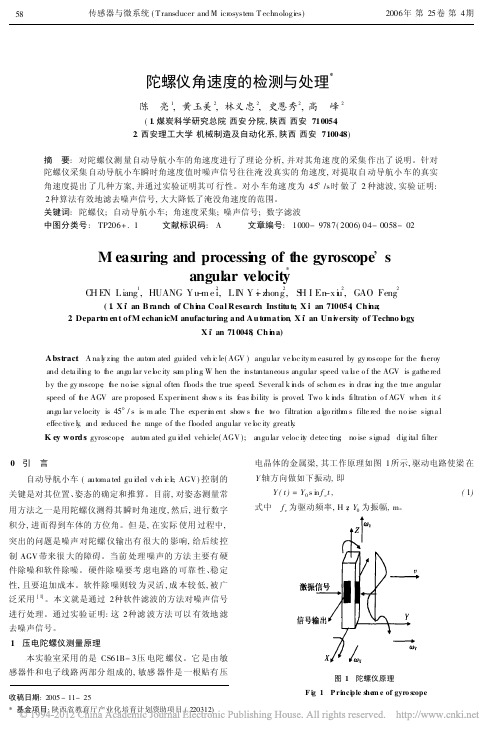
传感器与微系统(T ransducer and M icrosystem T echnolog i es)2006年第25卷第4期陀螺仪角速度的检测与处理*陈亮1,黄玉美2,林义忠2,史恩秀2,高峰2(1.煤炭科学研究总院西安分院,陕西西安710054;2.西安理工大学机械制造及自动化系,陕西西安710048)摘要:对陀螺仪测量自动导航小车的角速度进行了理论分析,并对其角速度的采集作出了说明。
针对陀螺仪采集自动导航小车瞬时角速度值时噪声信号往往淹没真实的角速度,对提取自动导航小车的真实角速度提出了几种方案,并通过实验证明其可行性。
对小车角速度为45b/s时做了2种滤波,实验证明:2种算法有效地滤去噪声信号,大大降低了淹没角速度的范围。
关键词:陀螺仪;自动导航小车;角速度采集;噪声信号;数字滤波中图分类号:TP206+.1文献标识码:A文章编号:1000-9787(2006)04-0058-02M eas uring and processi ng of t he gyroscope.sangular velocity*C H E N Liang1,HUANG Yu-m e i2,LI N Y-i zhong2,S H I En-x i u2,GAO Feng2(1.X i.an B ranch of Ch i na Coal Research Institu te,X i.an710054,Ch i na;2.Depart m en t of M echan icM anufac turing and Au to mat i on,X i.an Un i versity of Techno l ogy,X i.an710048,Ch i n a)Abstract:A na l y zi ng the autom ated guided veh i c le(AGV)angular ve l oc ity m easured by gy roscope for the t heroyand deta ili ng to t he angu lar ve l oc ity sa m pli ng.W hen the i nstantaneous angular speed va l ue o f the AGV is gathe redby the gy roscope,t he no ise si gnal often fl oods the true speed.Several k i nds of sche m es i n dra w i ng the true angularspeed of t he AGV are proposed.Exper i m ent s how s its f eas i bility is proved.Two k i nds filtrati on o f AGV when it s'angu lar ve locity is45b/s is m ade.T he exper i m ent show s t he t wo filtration a l go rith m s filte red the no ise signa leffec tive l y,and reduced t he range o f the fl ooded angular ve l oc ity greatl y.K ey word s:gyroscope;auto m ated gu i ded vehicle(AGV);angular veloc it y detec ting;no ise signa;l dig ital filter0引言自动导航小车(automa ted gu i ded v eh i c l e,AGV)控制的关键是对其位置、姿态的确定和推算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/8/3
10
§6.3 陀螺测试的伺服跟踪法
一 伺服跟踪法的基本原理
单自由度陀螺的单轴转台测漂
2020/8/3
11
§6.3 陀螺测试的伺服跟踪法
一 伺服跟踪法的基本原理
双自由度陀螺的单轴转台测漂
2020/8/3
12
§6.3 陀螺测试的伺服跟踪法
二 伺服跟踪法的测速方法
陀螺相对地理坐标系的位置需借助转台
1.陀螺输入轴沿当地前垂线方向
y
ly
x
ey e sin
o lz
d
Mb
mglz H
K M I Bx / H esin
z
2020/8/3
20
§6.4 陀螺测试的力矩反馈法
二 力矩反馈法法中陀螺相对地理坐标系的取向
陀螺相对地理坐标系的位置需借助转台
2.陀螺输出轴沿当地铅垂线方向
x N
yK ly
lz
ey e coscosK
z
d
Mb H
KM I Bx /H
ωe cos cosK
2020/8/3
21
§6.4 陀螺测试的力矩反馈法
二 力矩反馈法法中陀螺相对地理坐标系的取向
陀螺相对地理坐标系的位置需借助转台
3.陀螺自转轴沿当地铅垂线方向
z x
ey e coscosK
ly y
1. 摩擦力矩及其引起的漂移 2. 不平衡力矩及其引起的漂移 3. 非等弹性力矩及其引起的漂移
2020/8/3
8
§6.3 陀螺测试的伺服跟踪法
一 伺服跟踪法的基本原理
力
信
矩
陀螺转子 号
器
器
前置放大器
解调
校正
转台 驱动电机
角度输出 时基
记录 功放
d ey p
2020/8/3
9
§6.3 陀螺测试的伺服跟踪法
陀螺漂移产生的原因是作用在陀螺上的干扰 力矩根据干扰力矩的性质及其变化规律,干扰力 矩可以分为两类:
• 确定性干扰力矩 有规律、可试验或计算确定,易于 补偿。
• 随机性干扰力矩 无规律性。引起陀螺的随机漂移, 只能用统计方法来估计其概率统计 特性。
2020/8/3
6
§6.2 影响陀螺漂移的主要因素
2020/8/3
2
§6.1 陀螺漂移的基本概念
一 自由陀螺的漂移
ωd M b / H
自由陀螺存在漂移实际上是说明工程实际中的 陀螺仪与陀螺仪模型之间的差别,这种差别的表 现就是干扰力矩的存在,干扰力矩破坏了陀螺仪 的定轴性,使陀螺仪的角动量向量在惯性空间中 发生了变化,包括其大小和方向。
2020/8/3
对伺服状态的双自由
度陀螺而言,其内环轴
外环轴
和外环轴分别既是IA又
是OA,都有信号器和力
矩器,且交叉连接,构
成两个闭环回路。这样,
就可以用两个力矩器的
加矩电流
电流分别表示沿两根轴
内环轴
的漂移角速度。假定陀
加矩电流
螺在工作过程中力矩轴
是正交的,总漂移角速 度为:
d
2 dx
2 dy6.2 影响陀螺漂移的主要因素
力矩反馈法采用的是力矩平衡的静力学方法,因 此必须测量系统稳定时各个参数的数值,对系统的稳 定性如何判定有较高的要求。
力矩反馈法测定漂移速度只须备有足够分辨力和 精度电流记录装置就能测出陀螺的瞬时漂移。当然对 力矩器刻度因子的稳定性和线性度有很高的要求。
2020/8/3
17
§6.4 陀螺测试的力矩反馈法
ωd
Mb
mgly H
KM IBx /H
ωe cos cosK
2020/8/3
22
§6.5 陀螺漂移的数学模型
所谓陀螺漂移的数学模型,就是指描述陀螺 漂移变化规律的数学表达式。在建立正确的数 学模型的基础上,陀螺漂移测试和数据处理的 目的就在于确定数学模型中的各个参数的大小 及其稳定性,分析这些参数与物理因素之间的 关系,从而找到改进陀螺性能的方向和途径, 并为陀螺的使用提供误差补偿数据。
ie ey T
得到在同一时间间隔内转台相对惯性空间的转角
ip ie p
用时间间隔相除,即得到陀螺的漂移角速度
d ip / T ey p
2020/8/3
14
§6.3 陀螺测试的伺服跟踪法
三 伺服跟踪法的转台轴的取向
1. 输入轴在水平面内沿东西方向
d p
2. 输入轴与地球自转轴平行
d e p
一 力矩反馈法法的原理
力矩器
IA
信号器
OA
记录 装 置 加矩电流
SA 放大器
单自由度陀螺的力矩反馈法测漂
2020/8/3
18
§6.4 陀螺测试的力矩反馈法
一 力矩反馈法法的原理
双自由度陀螺的力矩反馈法测漂
2020/8/3
19
§6.4 陀螺测试的力矩反馈法
二 力矩反馈法法中陀螺相对地理坐标系的取向
d ey p
精确定位定向,即陀螺输入轴与转台轴平行,并且要使 转台在地理坐标系中精确定向。 精确地测出转台的转速。
2020/8/3
13
§6.3 陀螺测试的伺服跟踪法
二 伺服跟踪法的测速方法
首先在一段时间间隔内,观测转台相对地球的转角,然后根 据地球自转角速度沿转台方向的分量通过计算求得在这段时 间内地球相对惯性空间的转角
3. 输入轴沿当地垂线方向
d e sin p
2020/8/3
15
§6.4 陀螺测试的力矩反馈法
一 力矩反馈法法的原理
力
信
矩
陀螺转子 号
器
器
前置放大器
解调
记录器
K M I Bx iy H M b
d
Mb H
KM I Bx
/H
iy
2020/8/3
16
§6.4 陀螺测试的力矩反馈法
一 力矩反馈法法的原理
第六章 陀螺仪的测试与标定
2020/8/3
1
§6.1 陀螺漂移的基本概念
一 自由陀螺的漂移
由于各种原因,在陀螺上往往作用有人们所不希 望的各种干扰力矩,在这些可能是很小的干扰力矩 的作用下,陀螺将产生进动,从而使角动量向量慢 慢偏离原来的方向,我们把这种现象称为陀螺的漂 移。把在干扰力矩作用下陀螺产生的进动角速度称 为陀螺的漂移角速度或角速率。
对于确定性干扰力矩,根据其与加速度的分为:
•与加速度无关的干扰力矩,例如弹性力矩、电磁力矩等。 • 与加速度成比例的干扰力矩,例如由于陀螺质量偏心引起 的干扰力矩。 •与加速度平方成比例的干扰力矩,例如由非等弹性引起的 干扰力矩。
2020/8/3
7
§6.2 影响陀螺漂移的主要因素
干扰力矩的分类及其所产生的陀螺漂移
3
§6.1 陀螺漂移的基本概念
二 单自由度浮子陀螺的漂移
力矩器
IA
信号器
OA
SA
放大器
当沿着陀螺输入轴的角速度等于什么数值时,才能使一个 闭环系统中实际使用的陀螺仪的信号传感器输出信号为零。这 个角速度的大小称为单自由度浮子陀螺的漂移角速度。
2020/8/3
4
§6.1 陀螺漂移的基本概念
三 双自由度浮子陀螺的漂移