Simulink一些知识总结
SIMULINK基础详解

表10-6
通用模块及功能 模块名 功能 提供一个输入端口 地线,提供零电平 地线, 模块名 功能 提供一个输出端口 终止没有连接的输出 端口 示波器
生成一个常量值
选择开关
乘运算
比例运算 关系运算 饱和输出,让输出超 饱和输出, 过某一值时能够饱和
逻辑运算 积分器 数据类型转换
7、 信号路径模块库(signal routing) 、 信号路径模块库( ) 信号路径模块库提供了信号在模型中流动的各种路径通道 的选择,包括信号的分离、汇合以及通道选择等模块, 的选择,包括信号的分离、汇合以及通道选择等模块,如表 10-7所示: 所示: 所示
Simulink提供了大量的系统模功能模块,包括信号发生、 提供了大量的系统模功能模块,包括信号发生、 提供了大量的系统模功能模块 控制运算、显示等通用模块和很多专业性极强的专业模块, 控制运算、显示等通用模块和很多专业性极强的专业模块, 应用这些模块可以轻松实现各个学科的工程仿真和研发工作。 应用这些模块可以轻松实现各个学科的工程仿真和研发工作。 Simulink提供的系统功能模块的另一个大的特点是开放性强, 提供的系统功能模块的另一个大的特点是开放性强, 提供的系统功能模块的另一个大的特点是开放性强 可以将几个相关的模块组合成一个具体的子系统, 可以将几个相关的模块组合成一个具体的子系统,也可以自 己创建模块并将创建的新模块加入到系统模块库中供建模使 用。
6、 通用模块库(Commonly Used Blocks) 、 通用模块库( ) 通用模块库中提供了一般建模常用的模块,这些模块在 通用模块库中提供了一般建模常用的模块, 各自的分类模块库中均能找到,但为了使用方便, 各自的分类模块库中均能找到,但为了使用方便,特将一些 常用的模块集中起来组成了该库如表10-6所示: 所示: 常用的模块集中起来组成了该库如表 所示
simulink基本知识
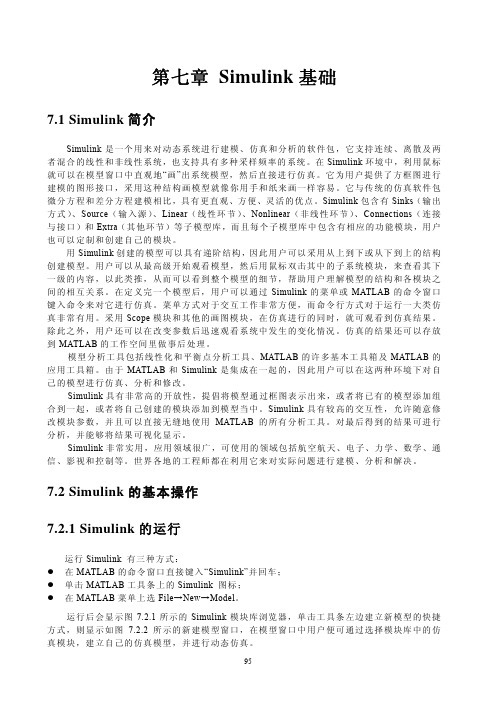
第七章 Simulink基础7.1 Simulink简介Simulink是一个用来对动态系统进行建模、仿真和分析的软件包,它支持连续、离散及两者混合的线性和非线性系统,也支持具有多种采样频率的系统。
在Simulink环境中,利用鼠标就可以在模型窗口中直观地“画”出系统模型,然后直接进行仿真。
它为用户提供了方框图进行建模的图形接口,采用这种结构画模型就像你用手和纸来画一样容易。
它与传统的仿真软件包微分方程和差分方程建模相比,具有更直观、方便、灵活的优点。
Simulink包含有Sinks(输出方式)、Source(输入源)、Linear(线性环节)、Nonlinear(非线性环节)、Connections(连接与接口)和Extra(其他环节)等子模型库,而且每个子模型库中包含有相应的功能模块,用户也可以定制和创建自己的模块。
用Simulink创建的模型可以具有递阶结构,因此用户可以采用从上到下或从下到上的结构创建模型。
用户可以从最高级开始观看模型,然后用鼠标双击其中的子系统模块,来查看其下一级的内容,以此类推,从而可以看到整个模型的细节,帮助用户理解模型的结构和各模块之间的相互关系。
在定义完一个模型后,用户可以通过Simulink的菜单或MATLAB的命令窗口键入命令来对它进行仿真。
菜单方式对于交互工作非常方便,而命令行方式对于运行一大类仿真非常有用。
采用Scope模块和其他的画图模块,在仿真进行的同时,就可观看到仿真结果。
除此之外,用户还可以在改变参数后迅速观看系统中发生的变化情况。
仿真的结果还可以存放到MATLAB的工作空间里做事后处理。
模型分析工具包括线性化和平衡点分析工具、MATLAB的许多基本工具箱及MATLAB的应用工具箱。
由于MATLAB和Simulink是集成在一起的,因此用户可以在这两种环境下对自己的模型进行仿真、分析和修改。
Simulink具有非常高的开放性,提倡将模型通过框图表示出来,或者将已有的模型添加组合到一起,或者将自己创建的模块添加到模型当中。
simulink建模与仿真基础 1200字-回复
simulink建模与仿真基础1200字-回复Simulink是一款非常强大的建模与仿真工具,广泛应用于控制系统、信号处理、通信系统等领域。
在使用Simulink进行建模与仿真之前,我们需要了解一些Simulink的基础知识。
首先,Simulink中的建模是通过将系统分解成一系列的模块,然后通过连接这些模块来实现对整个系统的建模。
这些模块可以是基础模块,也可以是自定义的子系统模块。
通过这种方式,我们可以将系统的复杂度降低,并且可以更好地理解系统的工作原理。
其次,Simulink中的仿真是指对建模后的系统进行动态仿真,即对系统进行各种输入条件下的模拟运行,并观察系统的响应。
通过仿真可以发现系统中的问题,如稳定性问题、鲁棒性问题等,并进行相关的调试与优化。
在使用Simulink进行建模与仿真时,我们需要先对系统的数学模型进行建立。
可以使用Simulink提供的建模工具,如基本的数学运算、积分、微分等,也可以通过使用MATLAB函数进行自定义建模。
同时,我们还可以使用Simulink 提供的各种信号源、传感器、执行器等进行系统的输入与输出。
在建模过程中,我们还需要选择适当的仿真参数,如仿真时间、步长等。
仿真时间决定了仿真的时间范围,而步长则决定了仿真的精度。
根据系统的特点,我们需要选择合适的参数来保证仿真的准确性与效率。
建模与仿真完成后,我们可以通过Simulink提供的结果可视化工具,如波形显示、频谱分析等,来分析系统的仿真结果。
同时,我们还可以使用Simulink提供的调试工具,如断点调试、单步执行等,来对系统进行调试与验证。
Simulink的建模与仿真基础包括了以上内容,希望对你有所帮助。
Simulink 是一种功能强大的建模和仿真环境,可用于工程和科学应用。
它将数学建模、仿真和分析应用程序与设计自主性结合在一个直观的环境中。
simulink常用模块梳理与总结
simulink常用模块梳理与总结Simulink is a powerful tool for modeling, simulating, and analyzing dynamic systems. It offers a wide variety of modules that can be used to construct complex models for various applications. These modules can be categorized into blocks, sources, sinks, continuous, and discrete blocks, among others.Simulink中常用的模块可以帮助用户快速构建复杂的系统模型,有效地进行仿真分析。
模块可以分为多种类型,如Blocks、Sources、Sinks、Continuous、Discrete等等。
不同的模块可以用于不同的应用场景,满足用户的各种需求。
Blocks are the basic components in Simulink, representing various mathematical operations, logical conditions, and signal processing functions. They can be connected together to form a block diagram that describes the system dynamics. Commonly used blocks include Sum, Gain, Integrator, and Transfer Function.Blocks是Simulink中的基本组件,代表各种数学运算、逻辑条件和信号处理功能。
用户可以将这些Blocks连接在一起,构成描述系统动态的框图。
Simulink小知识
powergui有三种运行模式:continous、discrete、phasorcontinous和discrete的用法区别在于,小型系统(状态量10个以下)用continous运行比较好,时间不是问题,精确度较高;但是大型系统或者电路中有电力电子器件就建议用discrete来运行,solver里边要设置成定步长,no continous state,步长根据经验自己设置(没经验可以先试几次,从小到大设置一下,两次运行结果差异不大以后就用步长大的为准),会影响模拟总时间和结果的精确性。
一般用来模拟电力电子,有igbt等开关。
phasor就是稳态模型,没有状态量。
如何提高simpowersystem的仿真速度1 使用ode23解法器(大家可能都知道)但效果很有限。
2 对系统离散化,方法为在你的gui模块里选择discretize electric model,采样时间越大仿真越快,当然采样时间你对系统精确性相配合,因为采样时间是与准确性成反比的3 在仿真的过程中尽量少开启示波器窗口,示波器参数中的点数限制最好关闭4 如果你的系统要从一个特定的状态开始仿真,在仿真参数设置是,最好在i/o选项中设置起始的状态矢量5 开启加速器,(方法在菜单仿真这一项中可以设置),这个也能大大加快仿真速度。
(感谢会员xu.chunke )还有就是,如果慢的不正常或半途仿真停止,就要考虑代数环了,这个就要在形成的环路上加memory来解决,一般存在反馈的复杂系统都容易出现这种情况。
matlab scope 编辑和保存图片Simulink 波形处理其实身边有不少人都遇到过这个问题:simulink 中强大的scope输出结果的图片如何保存呢?最直观的方法恐怕是print screen 然后到画图里反色保存,但是,你会发现出来的结果让人极其不爽,比如曲线颜色太淡,线条太细,添加注释也很麻烦,另外,如果你是一个用latex写文章的人,你一定会无比怀念在plot中直接另存为.eps的强大功能。
Simulink小知识
powergui有三种运行模式:continous、discrete、phasorcontinous和discrete的用法区别在于,小型系统(状态量10个以下)用continous运行比较好,时间不是问题,精确度较高;但是大型系统或者电路中有电力电子器件就建议用discrete来运行,solver里边要设置成定步长,no continous state,步长根据经验自己设置(没经验可以先试几次,从小到大设置一下,两次运行结果差异不大以后就用步长大的为准),会影响模拟总时间和结果的精确性。
一般用来模拟电力电子,有igbt等开关。
phasor就是稳态模型,没有状态量。
如何提高simpowersystem的仿真速度1 使用ode23解法器(大家可能都知道)但效果很有限。
2 对系统离散化,方法为在你的gui模块里选择discretize electric model,采样时间越大仿真越快,当然采样时间你对系统精确性相配合,因为采样时间是与准确性成反比的3 在仿真的过程中尽量少开启示波器窗口,示波器参数中的点数限制最好关闭4 如果你的系统要从一个特定的状态开始仿真,在仿真参数设置是,最好在i/o选项中设置起始的状态矢量5 开启加速器,(方法在菜单仿真这一项中可以设置),这个也能大大加快仿真速度。
(感谢会员xu.chunke )还有就是,如果慢的不正常或半途仿真停止,就要考虑代数环了,这个就要在形成的环路上加memory来解决,一般存在反馈的复杂系统都容易出现这种情况。
matlab scope 编辑和保存图片Simulink 波形处理其实身边有不少人都遇到过这个问题:simulink 中强大的scope输出结果的图片如何保存呢?最直观的方法恐怕是print screen 然后到画图里反色保存,但是,你会发现出来的结果让人极其不爽,比如曲线颜色太淡,线条太细,添加注释也很麻烦,另外,如果你是一个用latex写文章的人,你一定会无比怀念在plot中直接另存为.eps的强大功能。
simulink基础知识

simulink基础知识Simulink 基础知识简介Simulink 是由 MathWorks 开发的用于动态系统建模和仿真的图形编程环境。
它与 MATLAB 软件紧密集成,提供了一个强大的工具集,适用于各种工程和科学领域。
图形建模Simulink 以拖放界面进行建模,用户可以使用称为块的预定义组件。
这些块代表系统中的元素,如信号源、放大器和控制器。
用户可以通过连接块来创建复杂系统模型。
直觉操作Simulink 具有直观的界面,使用户能够通过拖放块轻松创建模型。
通过双击块,可以访问其属性和参数,从而可以根据需要进行自定义。
模型仿真Simulink 模型可以针对用户定义的输入进行仿真。
仿真引擎解决模型中的方程,并生成输出信号。
这些信号可以在示波器或其他可视化工具中查看。
建模元素Simulink 提供了广泛的块库,用于构建各种系统模型。
这些块包括:信号生成块:产生输入信号,如正弦波和方波。
元件块:表示电阻、电容和电感等物理元件。
传输线块:模拟电气和流体动力系统中的传输线行为。
控制系统块:实现 PID 控制器、状态空间控制器和线性化控制器。
模型分析Simulink 提供了用于分析模型行为的强大工具。
这些工具包括:示波器:显示模型中信号的时域波形。
Bode 图:绘制系统的幅度和相位响应。
Nyquist 图:显示系统的稳定性。
与 MATLAB 集成Simulink 与 MATLAB 紧密集成,这使得用户可以访问 MATLAB的广泛功能。
用户可以在 Simulink 模型中嵌入 MATLAB 代码块,从而可以执行高级计算和数据处理任务。
应用领域Simulink 用于各种应用,包括:控制系统设计信号处理动力学建模机械系统模拟电路分析优点图形建模界面,易于使用广泛的块库,涵盖各种工程领域与 MATLAB 紧密的集成,提供强大的计算能力用于模型分析的强大工具集缺点对于大型复杂模型,仿真时间可能很长非线性系统的建模可能具有挑战性需要对 MATLAB 有基本的了解。
matlab的simulink简易入门知识
matlab的simulink简易⼊门知识Simulink的扩展模块库SimPowerSystems——电⼒电⼦系统的建模和仿真⼯具SimPowerSystems是在Simulink环境下进⾏电⼒电⼦系统建模和仿真先进⼯具。
SimPowerSystems是Simulink下⾯的⼀个专⽤模块库,包含电⽓⽹络中常见的元器件和设备,以直观易⽤的图形⽅式对电⽓系统进⾏模型描述。
模型可与其它Simulink模块的相连接,进⾏⼀体化的系统级动态分析。
⼀、SimPowerSystems专⽤模块库的特点:1. 使⽤标准电⽓符号进⾏电⼒系统的拓扑图形建模和仿真;2. 标准的AC和DC电机模型模块;变压器;传输线;信号和脉冲发⽣器;HVDC控制;IGBT模块和⼤量设备模型,有断路器,⼆极管,IGBT,GTO,MOSFET和晶闸管;3. 使⽤Simulink强有⼒的变步长积分器和零点穿越检测功能,给出⾼度精确的电⼒系统仿真计算结果4. 为快速仿真和实时仿真提供了模型离散化⽅法;5. 提供多种分析⽅法,可以计算电路的状态空间表达、计算电流和电压的稳态解、设定或恢复初始电流/电压状态、电⼒机械的潮流计算;6. 提供了扩展的电⽓系统⽹络设备模块,如电⼒机械,功率电⼦元件,控制测量模块和3相元器件;7. 提供36个功能演⽰模型,可直接运⾏仿真;8. 提供详细的⽂档,完整的描述了各个模块和使⽤⽅法,还有5个详细的案例。
⼆、SimPowerSystems专⽤模块库的强⼤功能:(⼀)SimPowerSystems中的模块SimPowerSystems中模块的数学模型基于成熟的电磁和机电⽅程,⽤标准的电⽓符号表⽰。
它们可以同标准的Simulink模块⼀起使⽤建⽴包含电⽓系统和控制回路的模型。
连接通过与SimPowerSystems提供的测量模块实现。
SimPowerSystems拥有近100个模块,分别位于7个⼦模块库中。
这些库模块涵盖了以下应⽤范围:1. 电⽓⽹络(Electrical Sources & Elements)RLC⽀路和负载,π型传输线,线性和饱和变压器,浪涌保护,电路分离器,互感,分布参数传输线,3相变压器(2个和3个绕组),AC和DC电压源,受控电压源和受控电流源。
simulink概述

Simulink概述什么是SimulinkSimulink是一种图形化建模和仿真环境,用于多学科设计、建模、仿真和分析动态系统。
它是MATLAB的一个重要组成部分,适用于各种工程领域,如控制系统、通信系统、信号处理、图像处理等。
Simulink通过图形界面和可拖放的模块来建立和调整系统模型,具有直观、易用的特点。
Simulink的基本概念在使用Simulink建模系统之前,我们需要了解一些基本概念。
模块(Blocks)模块是Simulink中的基本构建单元,用于表示系统的各个组成部分。
模块可以是输入、输出、数学运算、逻辑运算、信号处理等等。
模块通过连接线连接在一起,形成系统模型。
系统模型(Model)系统模型是由各种模块构成的系统表示。
通过将各个模块连接在一起,形成一个完整的系统模型,可以用于对系统进行建模、仿真和分析。
信号流(Signal Flow)信号流表示模块之间的数据传递过程。
在Simulink中,信号可以是具有实时连续变化的模拟信号,也可以是离散的采样信号。
信号通过连接线在模块之间传递。
仿真和分析Simulink提供了强大的仿真和分析功能,可以用于验证和优化系统模型。
通过设置仿真参数和初始条件,可以对系统进行仿真,并获取系统在不同时间点的响应和输出。
此外,Simulink还提供了各种分析工具,如频域分析、时域分析、优化等,用于进一步分析和优化系统性能。
Simulink的优点和应用领域Simulink具有许多优点,使得它在工程领域得以广泛应用。
直观易用的建模环境Simulink提供了直观易用的图形界面,使得系统建模变得简单。
通过拖放模块和连接线,用户可以快速建立复杂的系统模型,而无需编写复杂的代码。
多学科设计支持Simulink支持多学科设计,可以在一个环境中集成不同学科的设计要求。
例如,可以将控制系统设计和信号处理设计集成到同一个Simulink模型中,以进行联合仿真和优化。
快速原型开发和验证Simulink的模块化特性使得系统开发变得更加快速和高效。
第5-6章simulink仿真基础知识及应用
SIMULINK提供了一个建立模型方框图的图形用户接口 SIMULINK提供了一个建立模型方框图的图形用户接口 (GUI),模型的创建只需要单击和拖动鼠标即可完成。 GUI),模型的创建只需要单击和拖动鼠标即可完成。 ),模型的创建只需要单击和拖动鼠标即可完成 SIMULINK中包含了许多实现不同功能的模块库, SIMULINK中包含了许多实现不同功能的模块库,使得在这 中包含了许多实现不同功能的模块库 种设计中,不必考虑模块的内部结构而直接实现其“ 种设计中,不必考虑模块的内部结构而直接实现其“想要 ”的功能。同时,在建立模型之后,可以直接进行一种 的功能。同时,在建立模型之后, “交互式的”仿真,通过相关菜单或命令的使用来执行 交互式的”仿真, 仿真, 仿真,得到能够按照自己的设定来进行仿真并观察对应的 结果。利用此软件,几乎可以做到不用写一行代码, 结果。利用此软件,几乎可以做到不用写一行代码,就能 完成整个动态系统的建模工作。 完成整个动态系统的建模工作。
打开模型文件
如需对一个已经存在的模型文件进行编辑、修改, 如需对一个已经存在的模型文件进行编辑、修改, 需要打开该模型文件时,方法如下: 需要打开该模型文件时,方法如下: 方法一: 命令窗口直接输入模型文件名( 方法一:在MATLAB命令窗口直接输入模型文件名(不 命令窗口直接输入模型文件名 须加文件类型.mdl)。 须加文件类型 )。 注意:必须在该文件保存的目录下) (注意:必须在该文件保存的目录下) 方法二:在模型库浏览器窗口或模型编辑窗口的file菜单 方法二:在模型库浏览器窗口或模型编辑窗口的 菜单 中选择open,然后选择或输入编辑模型的名字。 中选择 ,然后选择或输入编辑模型的名字。 方法三: 方法三:单击在模型浏览器窗口工具栏上的 打开命令 按钮, 打开命令按钮。 按钮,或模型编辑窗口工具栏上的 打开命令按钮。
simulink基础
B
Revolute D Ground D
工程软件训练
3.Neural Network Tool al Network Blockset节点上,通过单击鼠标右 键后,便可打开如图所示的Neural Network Blockset模块集窗口。
工程软件训练
2.SimMechanics(机构系统模块)
SimMechanics可以在simulink下直接使用的模块集,可以将表示各种机构 的模块在普通simulink窗口中绘制出来,并通过它自己提供的检测与驱动模块和 普通simulink模块连接起来,获得整个系统的仿真结果。SimMechanics必须在 MATLAB 6.1及以上版本的支持下运行,其动画显示还需要虚拟现实工具箱的 支持。
41
工程软件训练
2) 网络输入模块库(Net Input Functions)
用鼠标的左键双击Net Input Functions模块库的图标,便可打开如图所示的网 络输入模块库窗口。
网络输入模块库中的每一个模块都能够接受任意数目的加权输入向量、加权的 层输出向量,以及偏值向量,并且返回一个网络输入向量。
上面的这些模块需要的权值向量必须定义为列向量。这是因为Simulink中的信号 可以为列向量,但是不能为矩阵或者行向量。
43
工程软件训练
4)控制系统模块库(Control Systems) 用鼠标的左键双击Control Systems模块库的图标,便可打开如图所示的控
制系统模块库窗口。神经网络的控制系统模块库中包含三个控制器和一个示波器。
在Neural Network Blockset模块集中包含了四个模块库,用鼠标的左键双击
。 各个模块库的图标,便可打开相应的模块库
SIMULINK基础(全)

SIMULINK简介
一、什么是SIMULINK
SIMULINK是MATLAB软件的扩展,它是实现动态系统建模和仿真的 一个软件包,它与MATLAB语言的主要区别在于,其与用户交互接口 是基于Windows的模型化图形输入,其结果是使得用户可以把更多的 精力投入到系统模型的构建,而非语言的编程上。 所谓模型化图形输入是指SIMULINK提供了一些按功能分类的基本的 系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不 必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它 们连接起来就可以构成所需要的系统模型(以.mdl文件进行存取), 进而进行仿真与分析。
– In1:输入端
– Out1:输出端
– SubSystem:建立新的封装(Mask)功能模块
15
11、Logic and Bit operations(逻辑&位操作) Compare to constant :与常数比较
Compare to zero:与零比较
logical operator:逻辑操作算子 detect change:监测变化
– Rate limiter: 变化率限幅模块
10
6、Signal routing (信号路由模块)
– Mux:将多个单一输入转化为一个复合输出 – Demux:将一个复合输入转化为多个单一输出 – Switch:开关选择,当第二个输入端大于临界值时,输出由第一个 输入端而来,否则输出由第三个输入端而来 – Manual Switch:手动选择开关
好是首先试试ode45。
(2)ode23:二/三阶龙格-库塔法,它在误差限要求不高和求解的问题不太难 的情况下,可能会比ode45更有效。也是一个单步解法器。 (3)ode113:是一种阶数可变的解法器,它在误差容许要求严格的情况下通常 比ode45有效。ode113是一种多步解法器,也就是在计算当前时刻输出时 ,它需要以前多个时刻的解。 (4)ode15s:是一种基于数字微分公式的解法器(NDFs)。也是一种多步解
simulink基础者必看

1模块 Ctrl+拖动可以实现模块的复制2信号线windows 常用快捷键ctrl+X, ctrl+C, ctrl+V, ctrl+S, ctrl+Z 等同样适用3注释123121212128-3编码器...12第6章电路分析应用知识点:⏹MATLAB及Simulink电路仿真⏹Power System Blockset模块集⏹一般电路仿真⏹电子功率系统仿真6.1电路仿真概要6.1.1一个电阻电路仿真实例1、M文件方式实现clear;V=40;R=5;Ra=25;Rb=100;Rc=125;Rd=40;Re=37.5; R1=(Rb*Rc)/(Ra+Rb+Rc);R2=(Rc*Ra)/(Ra+Rb+Rc);R3=(Ra*Rb)/(Ra+Rb+Rc);Req=R+R1+1/(1/(R2+Re)+1/(R3+Rd));i=V/Req2、Simulink建模仿真M文件仿真与Simulink建模仿真的区别M文件仿真:烦琐,对用户的理论要求高,但灵活性高。
Simulink建模仿真:简单,对用户的理论要求不高,但灵活性差。
6.1.2 Power System Blockset模块集介绍Electrical Sources模块s模块Power Electronics模块Machines模块一个非常方便实用的用户交互界面工具,主要用于分析仿真模型中所用Power System Blockset模块库的子模块的状态。
观测被测量电流和电压的恒稳态,以及电路的状态变量(如电感的电流,电容的电压)Demos 模块6.2一般电路仿真6.2.1动态电路仿真1、RC电路的响应例 6_2 如图所示电路中的开关置于a点相当一段时间之后,突然将开关切换到b点,作出对应时间t的电压、电流波形图。
RC电路的响应2、RLC电路的响应例6_3 如图所示电路的初始能量为0,t=0时刻,将一个25mA的直流源作用到电路上,其中电容C=25nF,电感L=25mH,电阻R=400欧姆,画出图中电感L支路上电流的图形。
simulink 总结报告

实验一 MATLAB及SIMULINK仿真简介报告一、创建一个正弦信号的仿真模型。
1.1步骤(1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图1.1所示(2) 单击图标或选菜单“File”-“New”-“Model”,新建一个名为“untitled”的空白窗口。
(3) 在图1-1的Simulink模块的左侧或右侧子模块窗口中,双击“Source”子模块便可看到各种信号输入源模块(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就添加好了,如图1.2所示。
(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图1.3所示。
(7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”--“Start”,则仿真开始。
双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。
如图1.4所示。
(8) 保存模型,单击工具栏的图标,将该模型保存为“Ex0701.mdl”文件。
(9) 打开文件,“Ex0701.mdl”文件保存在默认当前路径,可以在图1.1的Simulink模块单击工具栏的图标打开“.mdl”文件。
1.2模拟结果Simulink模拟窗连线图示波器窗口图二、建立二阶系统的仿真模型。
2.1 步骤 方法一:输入信号源使用阶跃信号,系统使用开环传递函数s6.0s 12(1)在“S o u r c e s ”模块库选择“S t e p ”模块,在“C o n t i n u o u s ”模块库选择“Transfer Fcn”模块,在“Math Operations”模块库选择“Sum”模块,在“Sinks”模块库选择“Scope”。
部分Simulink基础
设置仿真结果的输出方式,如绘图、 表格等。
04
仿真的运行和停止
运行仿真
通过点击“开始”按钮或使用快捷键启动仿真 。
停止仿真
在仿真过程中,可以通过点击“停止”按钮或 使用快捷键停止仿真。
单步运行
在仿真过程中,可以使用单步运行功能,逐步执行仿真。
仿真结果的分析和可视化
仿真结果查看
在仿真结束后,可以查看仿真结果,包括输出波 形、数据表格等。
02
状态空间系统模块包括各种常见的动态系统,如线 性状态方程、离散状态方程等。
03
这些模块可以用于分析和设计控制系统,通过状态 空间方法进行控制设计和优化。
离散时间系统模块
离散时间系统模块用于描述离散 时间动态系统,它通常用于数字 控制系统和数字信号处理应用。
离散时间系统模块包括各种常见 的离散时间动态系统,如离散时 间滤波器、离散时间控制系统等。
Simulink是MATLAB的一个附加组件,它提供了模拟和数字信号处理的
强大工具,使工程师和科学家能够进行系统建模、仿真和分析。
02
基于图形的编程环境
Simulink使用图形化编程语言,用户可以通过拖放和连接不同的功能模
块来构建模型,无需编写复杂的代码。
03
支持多种应用领域
Simulink广泛应用于通信、控制、图像处理、信号处理、音频处理等领
图像处理与计算机视觉
Simulink提供了丰富的图像处理和计 算机视觉模块,可以用于图像增强、 目标检测、人脸识别等领域。
信号处理
Simulink在信号处理领域也有着广泛 的应用,如滤波器设计、频谱分析、 信号检测等。
02 Simulink基本操作
模型的创建和保存
simulink基本模块的使用

simulink基本模块的使用Simulink是一种强大的仿真和建模工具,常用于开发控制系统、信号处理和通信系统等。
本文将一步一步介绍Simulink的基本模块的使用,并讨论它们在不同领域中的应用。
一、Simulink基础知识在开始介绍基本模块之前,我们需要了解Simulink的一些基础知识。
Simulink是MATLAB软件的一个附加模块,用于建立模型以及执行仿真。
Simulink模型是由各种模块组成的,这些模块通过连线连接在一起,形成一个图形化的仿真模型。
它使用图形化界面,使用户能够直观地构建和修改模型。
二、Simulink基本模块1. 恒定值(constant)模块:恒定值模块用于生成恒定的信号,其输出值不会改变。
在模型中,我们可以通过恒定值模块设置输入信号的初始值、幅值以及一些其他属性。
该模块常用于生成常数信号,如直流电压或恒定的参考信号。
2. 脉冲(gain)模块:脉冲模块将输入信号的幅值乘以一个常数增益,然后输出结果。
通过改变增益系数,可以调整输出信号的幅值。
该模块常用于放大或缩小信号的幅值。
3. 积分器(integrator)模块:积分器模块对输入信号进行积分,并输出积分值。
积分器模块用于对信号进行数值积分操作,可用于控制系统中的积分环节,如PID控制器中的积分环节。
4. 微分器(derivative)模块:微分器模块对输入信号进行微分计算,并输出结果。
微分器模块适用于需要对信号进行微分操作的场景,如滤波器设计和导数控制器。
5. 比例积分微分(PID)控制器模块:PID控制器模块是Simulink中非常重要的一个模块,它结合了前面介绍的比例、积分和微分模块,实现了闭环控制。
PID控制器模块根据输入信号和误差信号生成控制信号,以实现期望输出。
该模块在自动控制系统中应用广泛。
6. 转换器(Switch)模块:转换器模块根据输入信号的值和条件判断,选择输出信号的路径。
该模块可以用于实现逻辑判断,选择不同的信号传递路径。
SIMULINK基础(全)解析

[t,x,y]=sim(‘模型文件名’, [to tf], simset(‘参数1’,参数值1,‘参数 2’,参数值2, …))
其中to为仿真起始时间,tf为仿真终止时间。[t,x,y]为返回值,t 为返回的时间向量值,x为返回的状态值,y为返回的输出向量 值。 – simset定义了仿真参数,包括以下一些主要参数:
7
3、 User-defined Function(函数模块) – Fcn:用自定义的函数(atlab的现有函数进行运算
– S-Function:调用自编的S函数的程序进行运算
8
4、 Lookup Tables(查表模块) – Look-Up Table:建立输入信号的查询表
2
SIMULINK简介
一、什么是SIMULINK
SIMULINK是MATLAB软件的扩展,它是实现动态系统建模和仿真的 一个软件包,它与MATLAB语言的主要区别在于,其与用户交互接口 是基于Windows的模型化图形输入,其结果是使得用户可以把更多的 精力投入到系统模型的构建,而非语言的编程上。 所谓模型化图形输入是指SIMULINK提供了一些按功能分类的基本的 系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不 必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它 们连接起来就可以构成所需要的系统模型(以.mdl文件进行存取), 进而进行仿真与分析。
– Signal routing(信号路由模块) – Sinks(接收器模块)
Ports&Subsystem(端口&子系统模块)
Math(数学模块) Sources(输入源模块)
5
– Logic and Bit operations(逻辑&位操作)
Simulink基础

Signal Builder
Ramp
Sine Wave
Step
Repeating Sequence
Chirp Signal
Random Number
Uniform Random Band-Limited White Noise Number lim
Repeating Sequence Stair
Variable Variable T ime DelayT ransport Delay
5.4 Simulink模块库 模块库
三、离散系统模块库
Discrete-Time Linear Systems
1 z Unit Delay -4 Z Integer Delay 4 Delays K Ts z-1 T apped Delay Discrete-T ime Integrator (z-1) z(z-0.5) Discrete Zero-Pole y(n)=Cx(n)+Du(n) x(n+1)=Ax(n)+Bu(n) Discrete State-Space z-0.75 z T ransfer Fcn Real Zero
5.1 Simulink简介 简介
创建的模型可以具有递阶结构, 用Simulink创建的模型可以具有递阶结构,因此用户可以采用从上到下或 创建的模型可以具有递阶结构 从下到上的结构创建模型。用户可以从最高级开始观看模型, 从下到上的结构创建模型。用户可以从最高级开始观看模型,然后用鼠标双 击其中的子系统模块,来查看其下一级的内容,以此类推, 击其中的子系统模块,来查看其下一级的内容,以此类推,从而可以看到整 个模型的细节,帮助用户理解模型的结构和各模块之间的相互关系。 个模型的细节,帮助用户理解模型的结构和各模块之间的相互关系。 在定义完一个模型后,用户可以通过Simulink的菜单或 的菜单或MATLAB的命令窗 在定义完一个模型后,用户可以通过Simulink的菜单或MATLAB的命令窗 口键入命令来对它进行仿真。菜单方式对于交互工作非常方便, 口键入命令来对它进行仿真。菜单方式对于交互工作非常方便,而命令行方 式对于运行一大类仿真非常有用。 式对于运行一大类仿真非常有用。 采用Scope模块和其他的画图模块,在仿真进行的同时,就可观看到仿真结 模块和其他的画图模块,在仿真进行的同时, 采用 模块和其他的画图模块 除此之外,用户还可以在改变参数后来迅速观看系统中发生的变化情况。 果。除此之外,用户还可以在改变参数后来迅速观看系统中发生的变化情况。 仿真的结果还可以存放到MATLAB的工作空间里做事后处理。 的工作空间里做事后处理。 仿真的结果还可以存放到 的工作空间里做事后处理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、set_param 函数的应用(一)函数调用格式:set_param(object,param,value),其中object为模块句柄,param 为参数,value 为参数值。
(二)举例(1)启动模型仿真set_param(gcs,'SimulationCommand','start')(2)精确控制模型仿真步长set_param(gcs, 'SimulationCommand', 'step'),step 为仿真步长数。
(3)设置模块在模型中的位置set_param('mymodel/Gain','Position',[50 250 125 275])(4)设置模块的回调函数set_param('mymodel/Gain','OpenFcn','my_open_cb')(5)设置模块的朝向set_param('mymodel/Gain','Orientation','left')二、实时改变模块的参数单步仿真一次,改变一次参数的值,代码如下:set_param(gcs,'SimulationCommand','start')while 1set_param(gcs,'SimulationCommand','pause')set_param(你的模块名,'Resistance', 你想改变的值); %这一句你替换一下参数即可set_param(gcs,'SimulationCommand','step')end三、上次末状态作为本次初始状态进行仿真问:已经建立好一个数据仿真模型现在想单独改变一个参数去观察参数扰动对结果的影响,例如参数变化围是1000 到1500,每7s 的时间让参数变化100,用什么方法可以实现?答:分次仿真,每次仿真保存末状态,下一次仿真前更改参数,再倒入上次仿真的末状态作为初始状态,设置如下图:四、模型加上标题问:怎么给模型加上标题?答:双击模型空白位置,即可输入text 文本,并可以设置字体大小颜色等。
五、模型仿真时间与实际运行时间Simulink 在Normal 模式下的仿真时间是非实时的,如果希望得知自己的模型转换为实际产品时的运行时间,需要将模型生成C 代码,下载到硬件目标中去运行并使用Profiler Timer 进行时间的记录。
如处理器在环仿真Processor in the Loop 可以测出模型实际的运行时间。
六、关于模块参数和模型解算配置的问题(一)模块参数的配置:根据用户算法要求来配置,具体参数意义与使用方法可以双击模块打开对话框后在help 按钮获取详细帮助。
(二)模型结算方法配置:运行仿真的算法一般由解算器提供,分为变步长解算器和固定步长解算器。
默认模型选择变步长解算器的ode45 算法,能够适应大多数模型应用场景。
如果用户求解刚性模型,需要使用ode23s 之类算法。
如果用户是使用simulink 进行控制算法建模,那么用户一般使用固定步长解算器以模拟与硬件芯片相同的时钟频率。
七、激活stateflow 状态图方法(一)方法一:通过模型的调度时间周期性激活;(二)方法二:通过trigger 信号去激活。
八、simulink 中过零问题讨论问:simulink 中有哪些过零检测方法?是否有专门的过零检测模块?答:只有自适应与非自适应两种选择,没有专门模块,但是很多模块里有是否使用过零检测的checkbox,如Relational Operator,switch 模块等。
九、模块采样时间与系统solver 最大步长关系当模块的Sample time 设置为-1 时表示继承父层的采样时间,如果模块在子系统里就继承子系统的采样时间,如果模块在最上层模型,就继承系统solver 的步长作为采样时间间隔了。
另外,如果模块的采样时间设置为-1 以外的值,如0 表示连续采样,这种时刻需要solver 解算器类型支持连续状态解算;当模块采样时间为0.5 这样的数字表示离散采样时间,每隔0.5 计算一次,这时要求模块的采样时间必须是solver 计算步长的整数倍。
十、solver 步长间隔对仿真的影响在变步长解算器中,采样时间间隔(即步长)会根据前后两次计算值的误差动态改变。
如果设置了最大步长,那么每次的步长就不会超出设置的这个上限。
十一、关于arduino 连接测温模块驱动的问题问:在arduino 上连接一个测温模块(如DS18B20),查看DS18B20 的技术手册,说是利用单总线通讯协议就可以读取温度,我想问问在有相关的库函数及读取温度C 程序的情况下,怎么用simulink去驱动测温模块工作,并通过串口将温度传回PC?答:有相关的库函数和C 例程的前提下,就把DS18B20 初始化的API 在model_initialize()中调用,在model_step()中使用读取温度的API、当然,在Model.c 文件中包含DS18B20 库函数所需要的头文件。
十二、使用S-Function 创建自定义模块如何避免重复初始化问:使用S-Function 创建了一个自定义模块,编写了有关的模块TLC 文件,并成功添加入Simulink 函数库中,但是在使用时发现若同一模型文件中包含两个以上该模块,代码生成时会重复进行初始化,即TLC 文件中%functionStart(block, system) Output 中的容,如何解决?答:1.将这部分初始化放到BLockType 的tlc 函数中;2.使用全局变量对Start 中的TLC 语句进行判断,仅第一次调用时生成,第二次以上屏蔽。
问:必须要在Start 中进行,全局变量怎么定义?在模块TLC 中进行定义吗?答:是的,当这个变量为TLC_TRUE 时则不再执行Start 函数,直接跳出。
否则执行。
以保证此函数在整个编译过程中只执行一次。
十三、关于代码空间的讨论问:在生成代码后,如何查看代码大概会占用多少RAM ROM,还有需要多少堆栈空间?答:C 代码看不出来的,在编译完之后生成了map文件,就可以看到了。
十四、Embedded Coder、Simulink Coder 的关系问:Embedded Coder 和Simulink Coder 有什么关系?答:如果你想将Simulink 模型生成C 代码,那么你需要使用Simulink Coder,而Simulink Coder的运行需要依赖MATLAB Coder,所以,完整的讲,如果你需要将Simulink 模型生成C 代码,需要MATLAB Coder + Simulink Coder;如果你想将Simulink 模型生成为嵌入式C 代码,那么,除了上述两个Coder 之外,你还需要Embedded Coder。
十五、关于测量算法在处理器上执行时间问题问:最近在看论文,看到作者利用示波器探针测量电机MTPA 算法在DSP 上在线计算时间。
我现在做了一个标幺化定点后的电流指令表,怎么用示波器测量算法在处理器上执行时间?答:算法在目标处理器上的执行时间是一个非常重要的数据,我们更多时候关心这个数据的最大值,示波器测量的方式,我觉得不一定能采集到最长时间的情形。
在使用MBD 开发软件的时候,建议使用PIL 获取这个时间值,可以通过大量的测试用例,获得这个最大时间值。
答:是的,matlab 的help 关于PIL 的用处也讲到其中之一就是测量execution time,把所需要的测量模块封装起来,给定一个输入向量,下载到目标板上,最后在matlab 窗口上输入命令,能够以图像形式给出关于在此输入向量下average time maximum time。
十六、关于Simulink 模型的比较问:在MBD 项目的工程管理中,模型的比较和差分是一个常见的问题。
国外一些公司设计了专门用来对Simulink 模型进行比较和充分的工具,比如德国的medini unite。
我想请教一下,各位在进行MBD 设计时,模型比较和差分的问题怎样解决,都有哪些好用的工具,是否有开放代码的工具。
答:MATLAB 产品提供了Simulink Report Generator,这个工具具有模型比较功能,也能实现一些模型合并。
十七、S-function builder 参数传递问题问:怎么把s-function builder 中定义的参数传递到所集成的C 语言源文件中?答:在Data Properties 的页面中定义参数的变量名何参数,如pvar。
然后在Outputs, Discrete Update 等子页面中都可以使用变量名和下标访问参数值,如pvar[0]。
使用这个变量名编写C代码,完成所有配置之后点击build,就可以将你写的C 代码打包集成到生成的C 文件中去了。
十八、快速原型和硬件在环的区别问:快速原型和硬件在环的区别?答:快速原型,也就是控制器快速原型的简称,顾名思义,就是对Simulink 算法进行控制器功能的快速实现。
一般来讲,你可以通过工控机,快速实现控制算法,而不必对控制算法进行代码生成相关的配置和设置。
然后,你可以用这个工控机实现的控制器和被控对象相连,形成闭环,实现在真实被控对象上对控制算法的验证或者参数调节。
硬件在环,是对控制器进行测试的一个环节,在实现了控制器软件和硬件的集成之后,这时候我们并不能确保控制器一定是正确的,如果这个时候直接把控制器和一些被控对象连接,可能造成财产或者人身伤害,在这种情况下,我们一般会通过工控机去模拟一个被控对象,然后把控制器和这个工控机相连,进行控制器相关测试。
十九、tlc 文件该怎么编写问:tlc 文件该怎么编写?答:在Simulink Browser 中搜索S-Function,从example 模块中找到带有tlc 的例子,参考编写即可。
另外可以阅读Embedded Coder 的User Guide 里面详细介绍了tlc 的编写方式。
二十、C MEX S-Function 延时功能问:现在需要做一个PWM 波形输出的S 函数,想利用延时功能进行高低位的切换,但是不知道C-MEX 的S 函数怎么写延时。
答:1、利用状态变量记录输入,在下几个采样时间后再输出;2、直接输出,使用unit delay 实现延时。
二十一、S-Function 生成代码如何添加自定义的头文件问:我用S 函数做了一个简单的s12xdp512 的Digital Output 的驱动模块,生成代码时一直报错Error Test.c: 28 undeclared identifier PORTA' Error Test.c: 41 undeclared identifier `DDRA' 。